JP7166551B2 - Torque sensor stator structure - Google Patents
Torque sensor stator structure Download PDFInfo
- Publication number
- JP7166551B2 JP7166551B2 JP2019108382A JP2019108382A JP7166551B2 JP 7166551 B2 JP7166551 B2 JP 7166551B2 JP 2019108382 A JP2019108382 A JP 2019108382A JP 2019108382 A JP2019108382 A JP 2019108382A JP 7166551 B2 JP7166551 B2 JP 7166551B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic
- shaft
- magnetic core
- torque sensor
- stator structure
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Landscapes
- Power Steering Mechanism (AREA)
- Measuring Magnetic Variables (AREA)
Description
本発明は、トルクセンサのステータ構造に関し、特に、軸に付与した磁歪部の周知のビラリ効果(Villari Effect)を利用した歪み検出センサのステータ構造に関し、特に、互いに対向するティース端面に傾斜した辺を付け、各辺同士が向かい合うように配置し、軸方向に対して斜め方向に傾き主磁束を流すことができ、歪みとその方向を磁束の変化として効率よく検出することである。 TECHNICAL FIELD The present invention relates to a stator structure of a torque sensor, and more particularly to a stator structure of a strain detection sensor that utilizes the well-known Villari effect of a magnetostrictive portion imparted to a shaft. and arranged so that the sides face each other so that the main magnetic flux can flow obliquely with respect to the axial direction, and the strain and its direction can be efficiently detected as changes in the magnetic flux.
従来、用いられていたこの種のトルクセンサとしては、特許文献1に開示された構成を挙げることができる。すなわち、図7は、トルクセンサ10の構造を示す図であり、具体的には、回転軸90の軸に垂直な向きから見た断面図である。
このトルクセンサ10は、磁歪特性を利用して回転軸90に印加されるトルクを検出する。磁歪特性を利用するため、トルクセンサ10は、回転軸90の軸方向に対して+45°の透磁率の変動を検出する図上側の第1の磁気コアユニット20Rと、-45°の透磁率の変動を検出する図下側の第2の磁気コアユニット20Lとを有する。この2方向の透磁率変化を測定することにより、回転軸90に印加されたトルクの向き及び大きさを検出する。回転軸90は磁歪材料で形成され、例えばニッケル・クロム・モリブデン鋼で形成される。この材料は例えば自動車のエンジンにおけるクランクシャフト材として一般に使用される。
A configuration disclosed in Patent Document 1 can be given as a conventionally used torque sensor of this type. That is, FIG. 7 is a diagram showing the structure of the
This
また、第1の磁気コアユニット20R全体は、一般的なハウジング(図示せず)に収容されており、例えばモールド材(図示せず)を用いて固定される。また、ハウジングには、導出部が設けられ、この中に外部回路が設けられる。外部回路は、図示しない各コイルに電力を供給したり、検出された出力信号を取得する。また、ハウジングの周囲に設けられた固定用ボルト孔に固定用ボルトを貫通させ、外部の固定箇所にネジ止めすることによってハウジングが固定される。なお、第2の磁気コアユニット20Lも、同様にハウジングに収容されている。
Also, the entire first
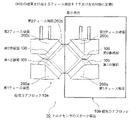
図8に示されるものは、図7のトルクセンサに用いられている磁気コアの斜視図であり、巻線部105を構成する励磁用コイル214aと検出用コイル215aとを有するボビン250の軸方向両端に、貫通孔270を介して第1ティース端面260a及び第2ティース端面260bが設けられている。
前記各ティース端面260aと260bは、その先端に、前記軸90の表面にならって曲折形成された第1辺30a及び第2辺30bが形成されている。
また、前述の構成のトルクセンサ10において、励磁周波数20kHz、励磁電流50mA、励磁用コイル100ターン、検出用コイル200ターン、第1及び第2ティース端面260a、260bの凸部(図示せず)と回転軸表面の空隙(磁気ギャップ)を1mmとした。一方の磁気コアユニットは、図9に示すように、第1及び第2ティース端面260a、260bの中央を結ぶ角度が45度となるのに対し、他方の磁気コアユニットでは-45度となるようにした。一方の磁気コアユニットと他方の磁気コアユニットを近づけて配置する場合、同じ極性の磁気コア端面同士が近接するように配置すると(N極同士を近接させ、S極同士を近接させる)、磁気コアユニット間における漏洩磁束を防止できるので好ましい。
8 is a perspective view of the magnetic core used in the torque sensor of FIG. A first
Each of the tooth end faces 260a and 260b has a first side 30a and a second side 30b formed by bending along the surface of the
Further, in the
各コイルの繋げ方と巻きまわす方向については図9に示すものとした。図9はコイルの接続状態、励磁用コイルを巻き回す向きと磁束成分の向きを説明する回転軸表面の展開図、図10は回転軸を示す一部構成図、図11は軸と磁気コアとの関係を示す構成図である。 Fig. 9 shows how to connect each coil and the winding direction. FIG. 9 is a developed view of the surface of the rotating shaft explaining the connection state of the coils, the winding direction of the excitation coil, and the direction of the magnetic flux component, FIG. 10 is a partial configuration diagram showing the rotating shaft, and FIG. 2 is a configuration diagram showing the relationship of
図9における1個目の磁気コアのティース端面260a、260bは、おのおの図9の領域S1、領域N1と対向し、領域S1及び領域N1間に実線矢印(太線)で示した向きの磁束が回転軸表面90f上に流される。2個目の磁気コアのティース端面260a、260bは、おのおの図9の領域S2、領域N2と対向し、領域S2及び領域N2間に実線矢印(太線)で示した向きの磁束が回転軸表面90f上に流される。3個目の磁気コアのティース端面260a、260bは、おのおの図9の領域S3、領域N3と対向し、領域S3及び領域N3間に実線矢印(太線)で示した向きの磁束が回転軸表面90f上に流される。4個目の磁気コアのヨーク端部の端面260a、260bは、おのおの図9の領域S4、領域N4と対向し、領域S4及び領域N4間に実線矢印(太線)で示した向きの磁束が回転軸表面90f上に流される。
図12は、前記回転軸90が回転した時に発生するトルクTに対する出力電圧Vの関係を示しており、第1信号VL1と第2信号VR1の信号との差分(トルクTを表わす)である第3信号VO1が負側と正側とで得られる。
FIG. 12 shows the relationship between the output voltage V and the torque T generated when the
従来のトルクセンサは、以上のように構成されていたため、次のような課題が存在していた。
すなわち、回転方向によって透磁率が異なる構成からなる軸の周囲に磁気コアを、わずかなギャップを介して配設し、ギャップパーミアンスによって出力される信号の測定によって、回転軸の左右トルクを測定する構成であるが、前記磁束はもっとも磁気抵抗が低い部分を主として流れるため、主磁束は第1ティース端面と第2ティース端面との距離がもっとも近いところを軸方向に対して垂直に流れ、トルク検出に寄与しないため、検出効率が悪くなっていた。
また、巻線部と磁歪部に磁束を流すヨークとが分離しているため、磁気的損失が存在し、加工及び組立のばらつきにより誤差が発生する。
さらに、アッセンブリ化された磁気コアは、磁束の方向に関係なくそれぞれ分離しているため、トルクセンサの精度悪化の要因となっていた。
Since the conventional torque sensor is configured as described above, there are the following problems.
That is, a configuration in which a magnetic core is arranged around a shaft having a configuration in which the magnetic permeability varies depending on the direction of rotation, with a slight gap therebetween, and the lateral torque of the rotating shaft is measured by measuring the signal output by the gap permeance. However, since the magnetic flux mainly flows in the portion where the magnetic resistance is the lowest, the main magnetic flux flows perpendicularly to the axial direction where the distance between the first tooth end surface and the second tooth end surface is the shortest, and is effective for torque detection. Since it does not contribute, the detection efficiency has deteriorated.
In addition, since the winding portion and the yoke for passing the magnetic flux to the magnetostrictive portion are separated, there is magnetic loss, and errors occur due to variations in processing and assembly.
Furthermore, since the assembled magnetic cores are separated regardless of the direction of the magnetic flux, this has been a factor in degrading the accuracy of the torque sensor.
本発明は、以上のような課題を解決するためになされたもので、特に、軸に付与した磁歪部のビラリ効果を利用した歪み検出センサのステータ構造において、軸と対向するティース端面に傾斜した辺を付け、各辺同士が向かい合うように配置し、軸方向に対して斜め方向に傾き主磁束を流すことができ、歪みとその方向を磁束の変化として効率よく検出することができるステータ構造を提供することを目的とする。 SUMMARY OF THE INVENTION The present invention has been made to solve the above-described problems, and in particular, in a stator structure of a strain detection sensor that utilizes the Villari effect of a magnetostrictive portion imparted to a shaft, the tooth end surface facing the shaft is inclined. A stator structure is provided in which sides are arranged so that the sides face each other, and the main magnetic flux can flow obliquely to the axial direction, and the distortion and its direction can be efficiently detected as changes in the magnetic flux. intended to provide
本発明によるステータ構造は、軸に付与した磁歪部の周知のビラリ効果(Villari Effect)を利用したステータ構造において、前記軸の外側に設けられ、複数個のコアを連設してなる磁路一体型の磁気コアブロックと、前記各磁気コアブロックのバックヨークには、複数の溝を介して形成された複数のティース端面と、前記軸を介して互いに対向する前記各ティース端面に傾斜して形成された辺と、前記各溝内に設けられた巻線部と、を備え、前記各磁気コアブロックを輪状に形成した時、前記各辺同士が前記軸を介して向かい合うように配置された構成とすることにより、前記軸の軸方向に対して斜め方向(0°より大きく90°より小さい)に傾けた主磁束を流すことができ、歪みとその方向を磁束の変化として検出する構成であり、また、前記各溝は、前記軸の軸方向に対して非直角方向に形成されていることにより、前記各溝に設けられた前記巻線部から互いに異なる方向の磁束が流れるようにした構成であり、また、前記各磁気コアブロックは、3個のティース端面及び2個の溝が前記バックヨークと共に一体製造されている構成であり、また、前記第1、第2磁束方向からの磁束は、前記各ティース端面から前記軸方向に対して、斜め方向(0°より大きく90°より小さい)で、かつ、上下又は左右対称に形成することで、歪み方向に対して対称な複数の信号を得て、その差分をとるようにした構成である。 The stator structure according to the present invention is a stator structure that utilizes the well-known Villari effect of a magnetostrictive portion imparted to a shaft. A body-shaped magnetic core block and a back yoke of each magnetic core block have a plurality of tooth end faces formed via a plurality of grooves, and the tooth end faces facing each other via the shaft are formed to be inclined. and winding portions provided in the respective grooves, and when the magnetic core blocks are formed in a ring shape, the sides are arranged to face each other via the shaft. As a result, the main magnetic flux can flow in an oblique direction (larger than 0° and smaller than 90°) with respect to the axial direction of the shaft, and the strain and its direction are detected as changes in the magnetic flux. Also, the grooves are formed in a direction non-perpendicular to the axial direction of the shaft, so that magnetic fluxes in different directions flow from the winding portions provided in the grooves. Each of the magnetic core blocks has a configuration in which three tooth end surfaces and two grooves are integrally manufactured together with the back yoke, and the magnetic fluxes from the first and second magnetic flux directions are , from each tooth end surface to the axial direction in an oblique direction (larger than 0° and smaller than 90°) and vertically or horizontally symmetrical, thereby generating a plurality of signals symmetrical with respect to the strain direction obtained, and the difference is taken.
本発明によるステータ構造は、以上のように構成されているため、次のような効果を得ることができる。
すなわち、軸に付与した磁歪部の周知のビラリ効果(Villari Effect)を利用したステータ構造において、前記軸の外側に設けられ、複数個のコアを連設してなる磁路一体型の磁気コアブロックと、前記各磁気コアブロックのバックヨークには、複数の溝を介して形成された複数のティース端面と、前記軸を介して互いに対向する前記各ティース端面に傾斜して形成された辺と、前記各溝内に設けられた巻線部と、を備え、前記各磁気コアブロックを輪状に形成した時、前記各辺同士が前記軸を介して向かい合うように配置された構成とすることにより、前記軸の軸方向に対して斜め方向(0°より大きく90°より小さい)に傾けた主磁束を流すことができ、歪みとその方向を磁束の変化として検出する構成よりなるため、バックヨークとティース端面とが一体に構成されているため、機械的精度が従来より大幅に向上する。
また、前記各溝は、前記軸の軸方向に対して非直角方向に形成されていることにより、前記各溝に設けられた前記巻線部から互いに異なる方向の磁束が流れるようにした構成により、主磁束を磁歪部の軸方向に対して斜め方向に形成されることで、検出効率(感度)を向上させることができる。
また、前記各磁気コアブロックは、3個のティース端面及び2個の溝が前記バックヨークと共に一体製造されている構成であるため、磁気的に効率の良い磁気コアをつくり、製造誤差を抑えることができる。
また、前記第1、第2磁束方向からの磁束は、前記各ティース端面から前記軸方向に対して、斜め方向(0°より大きく90°より小さい)で、かつ、上下又は左右対称に形成することで、歪み方向に対して対称な複数の信号を得て、その差分をとる構成からなるため、同一の磁気コアにおいて、複数のティースを組み合わせたことにより、磁歪部の軸方向に対して斜めの磁束を上下または左右対称に形成することで、歪み方向に対して対称な複数の信号を取得し、検出精度を向上させることができる。
Since the stator structure according to the present invention is configured as described above, the following effects can be obtained.
That is, in a stator structure utilizing the well-known Villari effect of a magnetostrictive portion imparted to a shaft, a magnetic core block integrated with a magnetic path is provided outside the shaft and formed by connecting a plurality of cores. and the back yoke of each of the magnetic core blocks includes a plurality of tooth end faces formed through a plurality of grooves, and inclined sides formed on the tooth end faces facing each other through the shaft; and a winding portion provided in each groove, wherein when each magnetic core block is formed in a ring shape, each side is arranged to face each other through the shaft, The main magnetic flux can flow in an oblique direction (more than 0° and less than 90°) with respect to the axial direction of the shaft, and the strain and its direction are detected as changes in the magnetic flux. Since the end faces of the teeth are integrally formed, the mechanical accuracy is greatly improved compared to the conventional one.
In addition, since each groove is formed in a direction non-perpendicular to the axial direction of the shaft, magnetic fluxes in different directions flow from the winding portions provided in each groove. By forming the main magnetic flux in a direction oblique to the axial direction of the magnetostrictive portion, the detection efficiency (sensitivity) can be improved.
In addition, since each magnetic core block has a configuration in which three tooth end surfaces and two grooves are integrally manufactured together with the back yoke, a magnetic core with good magnetic efficiency can be manufactured and manufacturing errors can be suppressed. can be done.
Further, the magnetic fluxes from the first and second magnetic flux directions are formed in an oblique direction (larger than 0° and smaller than 90°) with respect to the axial direction from each of the tooth end faces and vertically or horizontally symmetrically. Thus, a plurality of signals symmetrical with respect to the strain direction are obtained, and the difference between them is obtained. By forming the magnetic fluxes vertically or horizontally symmetrically, it is possible to acquire a plurality of signals symmetrical with respect to the strain direction and improve the detection accuracy.
本発明によるステータ構造は、軸に付与した磁歪部のビラリ効果を利用した歪み検出センサのステータ構造において、軸と対向するティース端面に傾斜した辺を付け、各辺同士が向かい合うように配置し、軸方向に対して斜め方向に傾いた主磁束を流すことができ、歪みとその方向を磁束の変化として効率よく検出することである。 A stator structure according to the present invention is a stator structure of a strain detection sensor that utilizes the Villari effect of a magnetostrictive portion imparted to a shaft, in which inclined sides are attached to tooth end surfaces facing the shaft, and the sides are arranged to face each other, To efficiently detect strain and its direction as a change in magnetic flux by allowing main magnetic flux to flow in an oblique direction with respect to the axial direction.
以下、図面と共に本発明によるステータ構造の好適な実施の形態について説明する。
尚、従来例と同一又は同等部分には、同一符号を付して説明する。
図1は、本発明の実施の形態に係るトルクセンサのステータ構造の多数の磁気コアブロック10aの中の1個の磁気コアブロックを示すものである。
前記磁気コアブロック10aは、全体が磁性材を、例えば、金属射出成形機で一体に成形したもので、さらに詳しく言えば、基板の役目をなすバックヨーク100に対して一体に、第1ティース端面260a、第2ティース端面260b、及び第3ティース端面260cを形成した構成である。
Preferred embodiments of the stator structure according to the present invention will be described below with reference to the drawings.
Identical or equivalent portions to those of the conventional example are denoted by the same reference numerals.
FIG. 1 shows one magnetic core block among many magnetic core blocks 10a of the stator structure of the torque sensor according to the embodiment of the present invention.
The
前記各ティース端面260a、260b、及び260c間には、第1溝101及び第2溝102が形成されており、前記各ティース端面260a、260b、260cの表面には、図10で示される軸90の周面91の曲面に対向する曲折面からなる第1辺30a、第2辺30b及び第3辺30cが、軸90の表面からわずかなギャップを介して配設されている。
A first groove 101 and a second groove 102 are formed between the tooth end faces 260a, 260b and 260c, and
前記各溝101、102には、表面側Pからみてハの字型をなすように、一対の第1、第2巻線部105、106が配設され、第1磁束方向107及び第2磁束方向108が発生するように構成されている。
尚、前記各巻線部105、106は、各溝101、102の配設されていることが図2に示されているが、例えば、他の形態として、図示していないが、各ティース260a、260b、260cの周囲に巻き付けて各溝101、102を通る構成も可能である。
従って、図2の構成により、1個の磁歪部110が形成されている。
A pair of first and second winding
2 shows that the winding
Therefore, one magnetostrictive portion 110 is formed by the configuration of FIG.
図3は、図4で示す多数の磁気コアブロック10a、すなわち、磁歪部110を筒状(図5、図6)に配設したステータ構造を用いて、前記軸90を回転させた時の第1磁束方向107から得られる第1信号VL1と第2磁束方向108(すなわち、第1磁束方向107と対称)から得られる第2信号VR1が得られ、その差分111が得られる。
尚、従来の状態では、各巻線部105及び106の励磁用コイル214aで励磁し、軸90のねじれを検出用コイル215aで出力信号を得るようにした構成であるが、本実施の形態では、前記軸90の透磁率の変化を利用し、多数の磁歪部110で出力電圧差として取り出す構成である。本実施の形態では、前述の磁歪部110を用いた周知のビラリ効果(Villari Effect)、すなわち、応力の作用下での、磁場中にある強磁性物質内における透磁率の変化を利用している。
FIG. 3 shows the number of magnetic core blocks 10a shown in FIG. 4, that is, the stator structure in which the magnetostrictive portions 110 are cylindrically arranged (FIGS. 5 and 6), and the
In the conventional state, the excitation coils 214a of the winding
図4は、一対の磁気コアブロック10aを用い、斜め磁束を形成するティース端面260a、260b、260cの組み合わせによって、上下及び左右対称に配置した構成図である。以下に図4の基礎となる図1の動作について説明する。
軸90に付与した磁歪部110のビラリ効果を利用した歪み検出センサ150において、軸90と対向するティース端面260a、260b、260cに傾斜した辺30a、30b、30cを付け、完成品としては、その辺同士が向かい合うように配置することにより、軸90の軸方向Eに対して斜め方向(0°より大きく90°より小さい)に傾けた主磁束を流すことができ、歪みとその方向を磁束の変化として、効率よく検出できる。磁束の傾きが45°のとき、効率最大となる。また、ティースとそれを繋ぐ巻線部105、106及びバックヨーク100を一体化させ、連続した磁性体で構成することで、磁気的な損失の少ない効率的なコアとし、一対で製造することで製造誤差を抑える。さらに、同一コアで、複数のティースを用いて軸方向に対して斜め方向(0°より大きく90°より小さい)の磁束を上下又は左右対称に形成することで、歪み方向に対して対称な複数の信号VL1、VR1を得ることができ、図3のように、その差分111をとることで、検出精度を向上させることが出来る。
FIG. 4 is a configuration diagram in which a pair of magnetic core blocks 10a are used and arranged vertically and horizontally symmetrically by combining teeth end
In the strain detection sensor 150 utilizing the Villari effect of the magnetostrictive portion 110 imparted to the
図5の構成は、4個の磁気コアブロック10aを組み合わせた構成を示し、実際には、さらに5個の磁気コアブロック10aを設けて完成品とするが、ここでは4個を組み合わせた場合について述べる。
図4~図6に本発明を実施する為の構成の一例を記載する。実施の形態の磁気コアブロックの最小単位を任意のN個とし、その磁気コアフロックを軸周方向に配置する。
本実施の形態では、軸90と対向するティース端面260a、260b、260cの傾斜した辺30a、30b、30c同士を向かい合わせ、図2に示す軸方向Eに対して斜め方向に傾けた主磁束を流すことができ、歪みとその方向を磁束の変化として、効率よく検出できる。また、ティース端面260a、260b、260cとそれを繋ぐ巻線部105、106及びバックヨーク100を一体化させ、連続した磁性体で構成することにより、磁気的な損失の少ない効率的な磁気コアブロックとする。さらに、同一の磁気コアブロックにおいて、上下または左右または上下左右対称な複数のティース端面260a、260b、260cの組み合わせにより、軸方向Eに対して斜め方向の磁束を上下または左右または上下左右対称に形成することで、歪み方向に対して対称な複数の信号VL1、VR1を得ることができ、その差分111をとることで、検出精度を向上させることが出来る。
The configuration of FIG. 5 shows a configuration in which four magnetic core blocks 10a are combined, and in reality, five magnetic core blocks 10a are further provided to form a finished product. state.
An example of a configuration for carrying out the present invention is described in FIGS. 4 to 6. FIG. The minimum unit of the magnetic core block of the embodiment is arbitrary N, and the magnetic core flocks are arranged in the axial direction.
In this embodiment, the inclined sides 30a, 30b, and 30c of the tooth end faces 260a, 260b, and 260c facing the
従って、主磁束を磁歪部110の軸方向Eに対して斜め方向に形成することで、検出効率(感度)を向上させることができる。ティース端面260a、260b、260cと巻線部105、106及びバックヨーク100を一体の連続した磁性体で構成することで、磁気的に効率の良い磁気コアブロックをつくり、製造誤差を抑えることができる。
同一の磁気コアブロックにおいて、複数のティース端面260a、260b、260cを組み合わせにより、磁歪部110の軸方向Eに対して斜めの磁束を上下または左右対称に形成することで、歪み方向に対して対称な複数の信号VL1、VR1を取得し、その差分111によって検出精度を向上させる。
Therefore, by forming the main magnetic flux in a direction oblique to the axial direction E of the magnetostrictive portion 110, detection efficiency (sensitivity) can be improved. By forming the
In the same magnetic core block, by combining a plurality of tooth end faces 260a, 260b, and 260c, oblique magnetic flux with respect to the axial direction E of the magnetostrictive portion 110 is formed vertically or horizontally symmetrically. A plurality of signals V L1 and V R1 are acquired, and the difference 111 between them is used to improve the detection accuracy.
本発明は、ステータ構造に関し、特に、軸に付与した磁歪部の周知のビラリ効果(Villari Effect)を利用したステータ構造において、前記軸の外側に設けられ、複数個のコアを連設してなる磁路一体型の磁気コアブロックと、前記各磁気コアブロックのバックヨークには、複数の溝を介して形成された複数のティース端面と、前記軸を介して互いに対向する前記各ティース端面に傾斜して形成された辺と、前記各溝内に設けられた巻線部と、を備え、前記各磁気コアブロックを輪状に形成した時、前記各辺同士が前記軸を介して向かい合うように配置された構成とすることにより、前記軸の軸方向に対して斜め方向(0°より大きく90°より小さい)に傾けた主磁束を流すことができ、歪みとその方向を磁束の変化として、検出する構成である。 The present invention relates to a stator structure, and more particularly, to a stator structure that utilizes the well-known Villari effect of a magnetostrictive portion applied to a shaft. A magnetic core block integrated with a magnetic path, a back yoke of each of the magnetic core blocks has a plurality of tooth end faces formed through a plurality of grooves, and the tooth end faces facing each other through the shaft are inclined. and winding portions provided in the respective grooves, and when the magnetic core blocks are formed in a ring shape, the sides are arranged to face each other via the shaft. With this configuration, the main magnetic flux can flow in an oblique direction (larger than 0° and smaller than 90°) with respect to the axial direction of the shaft, and the strain and its direction are detected as changes in the magnetic flux. It is a configuration that
10 トルクセンサのステータ構造
10a 磁気コアブロック(磁路一体型)
30a 第1辺
30b 第2辺
30c 第3辺
90 軸
100 バックヨーク
101 第1溝
102 第2溝
105 第1巻線部
106 第2巻線部
107 第1磁束方向
108 第2磁束方向(第1磁束方向と対称)
110 磁歪部
111 第1、第2磁束方向の信号の差分
150 検出センサ
214a 励磁用コイル
215a 検出用コイル
260a 第1ティース端面
260b 第2ティース端面
260c 第3ティース端面
E 軸方向
P 表面側
VL1 第1磁束方向から得られる第1信号
VR1 第2磁束方向108(第1磁束方向と対称)から得られる第2信号
10 Stator structure of
30a First side 30b Second side 30c
110 magnetostrictive portion 111 difference between signals in first and second magnetic flux directions 150 detection sensor 214a excitation coil
Claims (4)
前記軸(90)の外側に設けられ、複数個のコアを連設してなる磁路一体型の磁気コアブロック(10a)と、
前記各磁気コアブロック(10a)のバックヨーク(100)には、複数の溝(101、102)を介して形成された複数のティース端面と、
前記軸(90)を介して互いに対向する前記各ティース端面(260a~260c)に傾斜して形成された辺(30a~30c)と、
前記各溝(101、102)内に設けられた巻線部(105、106)と、を備え、
前記各磁気コアブロック(10a)を輪状に形成した時、前記各辺(30a~30c)同士が前記軸(90)を介して向かい合うように配置された構成とすることにより、前記軸(90)の軸方向(E)に対して斜め方向(0°より大きく90°より小さい)に傾けた主磁束を流すことができ、歪みとその方向を磁束の変化として検出する構成よりなるトルクセンサのステータ構造。 In a stator structure utilizing the well-known Villari Effect of a magnetostrictive portion (110) applied to a shaft (90),
a magnetic path-integrated magnetic core block (10a) provided outside the shaft (90) and formed by connecting a plurality of cores;
a plurality of tooth end faces formed via a plurality of grooves (101, 102) in the back yoke (100) of each magnetic core block (10a);
sides (30a to 30c) formed at an angle to the tooth end faces (260a to 260c) facing each other through the shaft (90);
Winding portions (105, 106) provided in the respective grooves (101, 102),
When each magnetic core block (10a) is formed in a ring shape, the sides (30a to 30c) are arranged so as to face each other through the shaft (90). The stator of a torque sensor configured to allow the main magnetic flux to flow in an oblique direction (greater than 0° and less than 90°) with respect to the axial direction (E) of the torque sensor, and to detect the distortion and its direction as a change in magnetic flux structure.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019108382A JP7166551B2 (en) | 2019-06-11 | 2019-06-11 | Torque sensor stator structure |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019108382A JP7166551B2 (en) | 2019-06-11 | 2019-06-11 | Torque sensor stator structure |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2020201135A JP2020201135A (en) | 2020-12-17 |
| JP2020201135A5 JP2020201135A5 (en) | 2022-01-19 |
| JP7166551B2 true JP7166551B2 (en) | 2022-11-08 |
Family
ID=73741973
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019108382A Active JP7166551B2 (en) | 2019-06-11 | 2019-06-11 | Torque sensor stator structure |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7166551B2 (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7228605B2 (en) * | 2021-02-17 | 2023-02-24 | シナノケンシ株式会社 | Torque detection sensor |
| JP7184941B2 (en) * | 2021-02-17 | 2022-12-06 | シナノケンシ株式会社 | Torque detection sensor |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5177661B2 (en) | 2008-08-26 | 2013-04-03 | 日立金属株式会社 | Torque sensor |
-
2019
- 2019-06-11 JP JP2019108382A patent/JP7166551B2/en active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5177661B2 (en) | 2008-08-26 | 2013-04-03 | 日立金属株式会社 | Torque sensor |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020201135A (en) | 2020-12-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7179297B2 (en) | Torque sensor stator structure | |
| JP7166551B2 (en) | Torque sensor stator structure | |
| US20220018723A1 (en) | Torque detection sensor | |
| US20220003617A1 (en) | Torque detection sensor | |
| JP2006311738A (en) | Permanent magnet type synchronous motor and manufacturing method thereof | |
| US20220020522A1 (en) | Core for torque detection sensor and torque detection sensor | |
| JP2008148447A (en) | Electric power steering motor | |
| JPH11344394A (en) | Torque sensor | |
| JP2008076148A (en) | Torsional torque measuring device | |
| JP6529662B2 (en) | Resolver | |
| US20010045135A1 (en) | Ring shaped magnetostrictive type torque sensor | |
| CN113945313A (en) | Torque detecting sensor | |
| JP5138039B2 (en) | Magnetic position sensor | |
| JP2015192550A (en) | Stator and stator core | |
| JP2011185656A (en) | Resolver | |
| JP2020201135A5 (en) | ||
| JP4827166B2 (en) | Composite magnetic head and rotating shaft torque detector | |
| JP7184941B2 (en) | Torque detection sensor | |
| JP5177661B2 (en) | Torque sensor | |
| JP7228605B2 (en) | Torque detection sensor | |
| JP7575000B2 (en) | Stator structure of magnetostrictive torque sensor | |
| JP2005337987A (en) | Torque sensor device | |
| JP6485822B1 (en) | Rotation angle detector | |
| JP2010063281A (en) | Permanent magnet type synchronous motor | |
| JP7179284B2 (en) | stator core structure |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220111 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220111 |
|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20221011 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20221018 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221018 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7166551 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |