JP7157157B2 - 航空機用の推進装置及びそれを製造する方法 - Google Patents
航空機用の推進装置及びそれを製造する方法 Download PDFInfo
- Publication number
- JP7157157B2 JP7157157B2 JP2020531692A JP2020531692A JP7157157B2 JP 7157157 B2 JP7157157 B2 JP 7157157B2 JP 2020531692 A JP2020531692 A JP 2020531692A JP 2020531692 A JP2020531692 A JP 2020531692A JP 7157157 B2 JP7157157 B2 JP 7157157B2
- Authority
- JP
- Japan
- Prior art keywords
- vane
- axis
- rotation
- propulsion device
- offset
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004519 manufacturing process Methods 0.000 title claims 2
- 230000008878 coupling Effects 0.000 claims description 199
- 238000010168 coupling process Methods 0.000 claims description 199
- 238000005859 coupling reaction Methods 0.000 claims description 199
- 230000033001 locomotion Effects 0.000 claims description 99
- 230000007246 mechanism Effects 0.000 claims description 42
- 238000000034 method Methods 0.000 claims description 6
- 230000000694 effects Effects 0.000 description 15
- 230000009467 reduction Effects 0.000 description 12
- 230000008901 benefit Effects 0.000 description 10
- 230000002829 reductive effect Effects 0.000 description 9
- 230000008859 change Effects 0.000 description 8
- 230000010355 oscillation Effects 0.000 description 7
- 238000010276 construction Methods 0.000 description 5
- 230000001419 dependent effect Effects 0.000 description 4
- 230000003068 static effect Effects 0.000 description 4
- 230000001133 acceleration Effects 0.000 description 3
- 238000004364 calculation method Methods 0.000 description 3
- 230000001010 compromised effect Effects 0.000 description 3
- 238000012821 model calculation Methods 0.000 description 3
- 230000000737 periodic effect Effects 0.000 description 3
- 239000011248 coating agent Substances 0.000 description 2
- 238000000576 coating method Methods 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 230000002411 adverse Effects 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000005265 energy consumption Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 230000036961 partial effect Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 238000012795 verification Methods 0.000 description 1
- 239000013585 weight reducing agent Substances 0.000 description 1
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C39/00—Aircraft not otherwise provided for
- B64C39/003—Aircraft not otherwise provided for with wings, paddle wheels, bladed wheels, moving or rotating in relation to the fuselage
- B64C39/005—Aircraft not otherwise provided for with wings, paddle wheels, bladed wheels, moving or rotating in relation to the fuselage about a horizontal transversal axis
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C39/00—Aircraft not otherwise provided for
- B64C39/10—All-wing aircraft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C11/00—Propellers, e.g. of ducted type; Features common to propellers and rotors for rotorcraft
- B64C11/006—Paddle wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C39/00—Aircraft not otherwise provided for
- B64C39/10—All-wing aircraft
- B64C2039/105—All-wing aircraft of blended wing body type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U10/00—Type of UAV
- B64U10/25—Fixed-wing aircraft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U10/00—Type of UAV
- B64U10/80—UAVs characterised by their small size, e.g. micro air vehicles [MAV]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U30/00—Means for producing lift; Empennages; Arrangements thereof
- B64U30/20—Rotors; Rotor supports
Description
FZ=M・r・ω2。
TZ=FZ・l、
この場合に、lは、羽根ベアリング軸33からの質量中心250の距離であり、これは、lが、質量中心250に作用する遠心力FZのベクトル上における羽根ベアリング軸33からの垂線として付与されることを意味している。距離lは、羽根のピッチ角αに依存しており、換言すれば、距離lは、ピッチ角αの関数であり、更に換言すれば、距離lは、ピッチ運動αの関数である。従って、l=l(α)である。



1 推進装置
100 航空機/サイクロジャイロ
11 推進装置1の円板
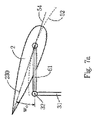
2 羽根
210 羽根2のリーディングエッジ
220 羽根2のトレーリングエッジ
230 羽根2の翼弦
240 羽根2のカンバ線
241 羽根2の上部側
242 羽根2の下部側
250 羽根2の質量中心
260 質量中心250を通じて通過し、回転軸51に平行に、且つ翼弦230に平行に延在する平面
3 ピッチメカニズム
31 ピッチメカニズム3/コンロッドの結合装置
32 羽根2に対する結合装置31の結合点
33 ピッチメカニズム3/羽根ベアリング軸/羽根ベアリング点のベアリング装置
300 ピッチ運動の円弧
4 オフセット装置
41 偏心ベアリング軸
42 オフセット装置4に対する結合装置31の結合点
43 推進装置1の回転軸51からの偏心ベアリング軸41のオフセット距離
51 推進装置1の回転軸
52 回転軸51を中心とした円形経路
53 推進装置1の回転の方向を示す矢印
54 羽根ベアリング軸33を通じた円形経路52に対する接平面/接線
61 羽根2に対する結合装置31の間接的結合用の接続要素
62 羽根2に対する結合装置31の結合用の接続要素
7 角度wαの関数としてのオフセット装置4における正規化された負荷のグラフ
71 オフセット装置4における正規化された負荷を表記する縦軸
72 度を単位とする角度wαを表記する横軸
81 羽根の数n
82 静止型基準システム内において示されたオフセット装置における負荷の調波値の序数k
83 推進装置と共に共回転する基準システム内において示されたオフセット装置における負荷の調波値の序数j
84、85、86 オフセット装置における負荷に対するゼロにならない寄与
87 消失寄与
9 質量中心250からの羽根ベアリング軸33の距離wgxの関数としてのオフセット装置4における正規化された平均力のグラフ
91 偏心ベアリング軸41における平均力のx成分
92 偏心ベアリング軸41における平均力のy成分
93 オフセット装置4における正規化された平均力を表記する縦軸
94 ミリメートルを単位とする距離wgxを表記する横軸
α ピッチ角/ピッチ運動
wα 円形経路に対する接線54と羽根ベアリング軸33に対する結合点32の接続ラインの間の角度
wgx 質量中心250を通じた、且つ翼弦230に平行な平面260からの羽根ベアリング軸33の距離
wgz 質量中心250を通じた、且つ翼弦230に垂直の平面からの羽根ベアリング軸33の距離
r 推進装置1の回転軸51からの羽根ベアリング軸33の距離
l 羽根ベアリング点33からの質量中心250の距離
ρ 羽根ベアリング軸33、結合点32、及び回転軸51の間の角度
FZ 羽根に作用する遠心力
Claims (16)
- 航空機(100)用の推進装置(1)であって、
-円形経路(52)に沿って前記推進装置(1)の回転軸(51)を中心として回転され得る羽根(2)と、
-結合装置(31)及びベアリング装置(33)を有するピッチメカニズム(3)であって、
-前記羽根(2)は、前記推進装置の前記回転軸(51)に平行に羽根ベアリング軸(33)を中心として回動するべく取り付けられている、ピッチメカニズム(3)と、
-前記羽根が接続点(42)において前記結合装置(31)によって結合されるオフセット装置(4)であって、前記オフセット装置(4)は、
-オフセット距離(43)が非ゼロの値に設定された際に、前記推進装置の前記回転軸(51)を中心とした前記円形経路(52)に沿った前記羽根(2)の前記回転が前記羽根(2)のピッチ運動(α)を実現するように、
前記推進装置の前記回転軸(51)に平行に調節可能なオフセット距離(43)において取り付けられた偏心ベアリング軸(41)を定義している、オフセット装置(4)と、
を有し、
-前記結合装置(31)は、結合点(32)において前記羽根(2)に結合されており、前記結合点(32)は、前記オフセット距離(43)がゼロに設置された際に、前記羽根ベアリング軸(33)及び前記結合点(32)を有する平面並びに前記羽根ベアリング軸(33)を通じた前記円形経路(52)に対する接平面(54)が特定のゼロにならない角度(wα)を含むような方式により、位置決めされて、
前記特定のゼロにならない角(wα)は、前記オフセット距離(43)がゼロに設定された際に、回転軸(51)から羽根ベアリング軸(33)までの距離(r)に対する羽根ベアリング軸(33)から結合点(32)までの距離の比率の75%~125%の範囲の値をとる、推進装置。 - 前記特定のゼロにならない角(wα)は、前記オフセット距離(43)がゼロに設定された際に、前記羽根ベアリング軸(33)及び前記結合点(32)を有する前記平面並びに前記推進装置の前記回転軸(51)及び前記結合点(32)から前記回転軸(51)までの接続ラインを有する前記平面が、ほとんど90°の角度を含むような方式により、設定されている請求項1に記載の推進装置(1)。
- 前記特定のゼロにならない角(wα)は、前記オフセット距離(43)がゼロに設定された際に、回転軸(51)から羽根ベアリング軸(33)までの距離(r)に対する羽根ベアリング軸(33)から結合点(32)までの距離の比率の90%~110%の範囲の値をとる請求項1又は2に記載の推進装置(1)。
- 前記羽根における前記結合装置(31)の前記結合点(32)は、羽根プロファイルの外側において位置決めされている請求項1乃至3のいずれか1項に記載の推進装置(1)。
- 前記羽根ベアリング軸(32)は、前記羽根の質量中心(250)を通じて延在する、且つ前記回転軸(51)及び前記羽根の翼弦(230)の両方に平行に延在する、平面との関係において、特定の距離(wgx)だけ、前記推進装置の前記回転軸(51)に向かってシフトされている請求項1乃至4のいずれか1項に記載の推進装置(1)。
- 前記羽根ベアリング軸(33)は、前記羽根プロファイルの外側において延在している請求項5に記載の推進装置(1)。
- 接続要素(61)を更に有し、前記接続要素(61)は、前記羽根(2)が前記ベアリング装置(33)によって回動するべく取り付けられている地点において、前記羽根(2)と堅固に接続され、且つ前記羽根の前記結合点(32)においては、前記結合装置(31)と運動自在に接続されている請求項1乃至6のいずれか1項に記載の推進装置(1)。
- 航空機(100)用の推進装置(1)であって、
-円形経路(52)に沿って前記推進装置の回転軸(51)を中心として回転され得る羽根(2)と、
-結合装置(31)及びベアリング装置(33)を有するピッチメカニズム(3)であって、
-前記羽根(2)は、前記推進装置の前記回転軸(51)に平行に羽根ベアリング軸(33)を中心として回動するべく前記ベアリング装置(33)によって取り付けられている、ピッチメカニズム(3)と、
-前記羽根が、接続点(42)において前記結合装置(31)によって結合されるオフセット装置(4)であって、前記オフセット装置(4)は、
-オフセット距離(43)が非ゼロ値に設定された際に、前記円形経路(52)に沿った前記推進装置の前記回転軸(51)を中心とした前記羽根(2)の前記回転が、前記羽根(2)のピッチ運動(α)を実現するような方式で、前記結合装置(51)が、前記羽根(2)を前記オフセット装置(4)に結合するように、
前記推進装置の前記回転軸(51)に平行に調節可能なオフセット距離(43)において取り付けられた偏心ベアリング軸(41)を定義している、オフセット装置(4)と、
を有し、
前記羽根ベアリング軸(33)は、前記羽根の質量中心(250)を通じて延在する、且つ前記羽根の前記回転軸(51)及び翼弦(230)の両方に平行に延在する、平面との関係において、特定の距離(wgx)だけ、前記推進装置の前記回転軸(51)に向かってシフトされており、
前記特定の距離(wgx)は、下記式が略ゼロとなるように選択される、推進装置。
M:羽根(2)の質量
r:回転軸(51)からの羽根ベアリング軸(33)の距離
α A :ピッチ運動(α)の振幅
I cm :羽根の質量中心(250)との関係において算出された質量慣性モーメント
wgz:羽根の質量中心(250)を通じて延在する、且つ翼弦(230)に垂直である、平面との関係において、羽根ベアリング軸(33)の距離 - 前記羽根(2)は、前記特定の距離(wgx)だけの前記シフトを生成するほどに不均一な質量分布を有する請求項8に記載の推進装置(1)。
- 前記羽根ベアリング軸(33)は、一方において、前記翼弦(230)に垂直である、且つ前記質量中心(250)を通じて延在する、平面により、且つ他方においては、前記翼弦(230)に垂直である、且つリーディングエッジ(210)を通じて延在する、平面により、閉じ込められた領域内において位置決めされている請求項8又は9に記載の推進装置(1)。
- 前記羽根ベアリング軸(33)は、羽根プロファイルの外側において延在している請求項8乃至10のいずれか1項に記載の推進装置(1)。
- 前記結合装置(31)は、前記オフセット装置の前記接続点(42)を前記羽根の結合点(32)と接続するコンロッドを有する請求項1乃至11のいずれか1項に記載の推進装置(1)。
- 個々の関連するピッチメカニズム(3)を有する更なる羽根(2)を有し、すべての羽根(2)及び前記羽根のピッチメカニズム(3)は、類似のタイプであり、且つ前記推進装置の前記羽根(2)は、前記円形経路(52)に沿って前記推進装置の前記回転軸(51)を中心として均等に分散されている請求項1乃至12のいずれか1項に記載の推進装置(1)。
- 合計で5つの羽根(2)を有する請求項13に記載の推進装置(1)。
- 前記推進装置は、サイクロジャイロ回転翼である請求項1乃至14のいずれか1項に記載の推進装置(1)。
- 航空機(100)用の推進装置(1)を製造する方法であって、
-円形経路(52)に沿って前記推進装置(1)の回転軸(51)を中心として回転させ得る羽根(2)を提供するステップと、
-結合装置(31)及びベアリング装置(33)を有するピッチメカニズム(3)を提供するステップと、
-前記推進装置の前記回転軸(51)に平行に羽根ベアリング軸(33)を中心として前記ベアリング装置(33)により前記羽根(2)を回動可能に取り付けるステップと、
-前記羽根(2)を接続点(42)において結合装置(31)によってオフセット装置(4)に結合するステップであって、
-オフセット距離(43)が非ゼロの値に設定された際に、前記推進装置の前記回転軸(51)を中心とした前記円形経路(52)に沿った前記羽根(2)の前記回転が前記羽根(2)のピッチ運動(α)を実現するような方式で、前記結合装置(31)が前記羽根(2)をオフセット装置(4)に結合するように、
前記オフセット装置(4)は、前記推進装置の前記回転軸(51)に平行に調節可能なオフセット距離(43)において取り付けられた偏心ベアリング軸(41)を定義しているステップと、
-前記羽根の質量中心(250)を通じて延在する、且つ前記回転軸(51)及び前記羽根の翼弦(230)の両方に平行に延在する、平面との関係において、特定の距離(wgx)だけ、前記推進装置の前記回転軸(51)に向かってシフトされるように、前記羽根ベアリング軸(33)を位置決めするステップであって、
前記羽根ベアリング軸(33)を位置決めするステップは、
-前記円形経路に沿った前記羽根(2)の回転中に、前記偏心ベアリング軸(41)の偏向の方向において示す平均力の成分が負になるように前記特定の距離(wgx)を決定して、前記平均力が前記偏心ベアリング軸(41)の偏向を妨げるステップを含み、
前記平均力は、前記円形経路(52)に沿った前記羽根(2)の完全な回転の最中においてオフセット装置(4)に作用する力全体の平均であるステップと、
を含む方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102017011890.6 | 2017-12-14 | ||
| DE102017011890.6A DE102017011890B4 (de) | 2017-12-14 | 2017-12-14 | Antriebsvorrichtung für ein Fluggerät |
| PCT/EP2018/084371 WO2019115532A1 (de) | 2017-12-14 | 2018-12-11 | Antriebsvorrichtung für ein fluggerät |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021506650A JP2021506650A (ja) | 2021-02-22 |
| JP7157157B2 true JP7157157B2 (ja) | 2022-10-19 |
Family
ID=64870428
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020531692A Active JP7157157B2 (ja) | 2017-12-14 | 2018-12-11 | 航空機用の推進装置及びそれを製造する方法 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US11479356B2 (ja) |
| EP (2) | EP3715249B1 (ja) |
| JP (1) | JP7157157B2 (ja) |
| CN (1) | CN111479750B (ja) |
| AR (2) | AR113936A1 (ja) |
| BR (1) | BR112020011814A2 (ja) |
| DE (1) | DE102017011890B4 (ja) |
| WO (1) | WO2019115532A1 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA3134326A1 (en) | 2019-06-25 | 2020-12-30 | Mehdi HABIBNIA RAMI | Flight propulsion system based on rotary and stationary devices |
| EP4091939A1 (de) | 2021-05-21 | 2022-11-23 | CycloTech GmbH | Fluggerät |
| US20220380059A1 (en) * | 2021-05-31 | 2022-12-01 | George Pul | Piston Wings |
| DE102021003751B3 (de) | 2021-07-20 | 2022-11-24 | Friedrich B. Grimm | Fahrzeug mit einer drehflügelkinematik |
| DE102021004136B4 (de) | 2021-08-09 | 2023-03-09 | Friedrich B. Grimm | Vorrichtung für ein Drehflügelfahrzeug oder für eine Drehflügelturbine |
| DE102021005965B3 (de) | 2021-12-01 | 2022-11-10 | Friedrich Grimm | Rotorblatt für eine wind - oder wasserturbine sowie für ein drehflügelfahrzeug und insbesondere für einen hubschrauber |
| DE102022114599B4 (de) | 2022-06-09 | 2024-02-08 | Louis Gagnon | Fluggerät |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1753252A (en) | 1927-02-25 | 1930-04-08 | Strandgren Carl Bruno | Turbine-wheel propeller and motor |
| US4194707A (en) | 1977-12-16 | 1980-03-25 | Sharpe Thomas H | Lift augmenting device for aircraft |
| US20060196992A1 (en) | 2005-03-04 | 2006-09-07 | Boschma James H Jr | Cycloidal hybrid advanced surface effects vehicle |
| US20070200029A1 (en) | 2006-02-27 | 2007-08-30 | Sullivan Callum R | Hydraulic cycloidal control system |
| JP2009051381A (ja) | 2007-08-28 | 2009-03-12 | Mitsubishi Heavy Ind Ltd | サイクロイダル・ブレード |
| JP2013184645A (ja) | 2012-03-09 | 2013-09-19 | Japan Aerospace Exploration Agency | 可変ピッチプロペラ |
| US10279900B2 (en) | 2016-08-10 | 2019-05-07 | Bell Helicopter Textron Inc. | Rotorcraft variable thrust cross-flow fan systems |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2413460A (en) * | 1944-05-16 | 1946-12-31 | David W Main | Airplane |
| US2950765A (en) * | 1956-12-27 | 1960-08-30 | Pacific Car & Foundry Co | Balanced lift vertical axis propellers |
| US4196707A (en) | 1978-07-31 | 1980-04-08 | General Motors Corporation | Exhaust gas recirculation control |
| US5265827A (en) * | 1991-06-17 | 1993-11-30 | Northrop Corporation | Paddle wheel rotorcraft |
| DE19637833C1 (de) * | 1996-09-17 | 1998-02-05 | Voith Hydro Gmbh Schiffstechni | Zykloidalpropeller |
| US20080011900A1 (en) * | 2006-07-15 | 2008-01-17 | Javier Quintana | Apparatus and method to control the flight dynamics in a lighter-than-air airship |
| DE102007009951B3 (de) * | 2007-03-01 | 2008-07-31 | Bauhaus Luftfahrt E.V. | Fluggerät mit rotierenden Zylindern zur Erzeugung von Auftrieb und/oder Vortrieb |
| US20100322769A1 (en) * | 2008-02-25 | 2010-12-23 | Thomas Glenn Stephens | Fluid turbine optimized for power generation |
| US9346535B1 (en) * | 2012-04-05 | 2016-05-24 | The United States Of America As Represented By The Secretary Of The Air Force | Ring cam and ring cam assembly for dynamically controlling pitch of cycloidal rotor blades |
| AT518116B1 (de) * | 2015-12-30 | 2019-05-15 | Cyclotech Gmbh | Fluggerät |
| US10384776B2 (en) * | 2017-02-22 | 2019-08-20 | Bell Helicopter Textron Inc. | Tiltrotor aircraft having vertical lift and hover augmentation |
| US10814967B2 (en) * | 2017-08-28 | 2020-10-27 | Textron Innovations Inc. | Cargo transportation system having perimeter propulsion |
-
2017
- 2017-12-14 DE DE102017011890.6A patent/DE102017011890B4/de active Active
-
2018
- 2018-12-11 EP EP20168135.0A patent/EP3715249B1/de active Active
- 2018-12-11 US US16/771,868 patent/US11479356B2/en active Active
- 2018-12-11 CN CN201880080368.XA patent/CN111479750B/zh active Active
- 2018-12-11 JP JP2020531692A patent/JP7157157B2/ja active Active
- 2018-12-11 BR BR112020011814-1A patent/BR112020011814A2/pt active Search and Examination
- 2018-12-11 EP EP18825918.8A patent/EP3548378B1/de active Active
- 2018-12-11 WO PCT/EP2018/084371 patent/WO2019115532A1/de unknown
- 2018-12-13 AR ARP180103647A patent/AR113936A1/es active IP Right Grant
-
2021
- 2021-09-14 AR ARP210102547A patent/AR123508A2/es unknown
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1753252A (en) | 1927-02-25 | 1930-04-08 | Strandgren Carl Bruno | Turbine-wheel propeller and motor |
| US4194707A (en) | 1977-12-16 | 1980-03-25 | Sharpe Thomas H | Lift augmenting device for aircraft |
| US20060196992A1 (en) | 2005-03-04 | 2006-09-07 | Boschma James H Jr | Cycloidal hybrid advanced surface effects vehicle |
| US20070200029A1 (en) | 2006-02-27 | 2007-08-30 | Sullivan Callum R | Hydraulic cycloidal control system |
| JP2009051381A (ja) | 2007-08-28 | 2009-03-12 | Mitsubishi Heavy Ind Ltd | サイクロイダル・ブレード |
| JP2013184645A (ja) | 2012-03-09 | 2013-09-19 | Japan Aerospace Exploration Agency | 可変ピッチプロペラ |
| US10279900B2 (en) | 2016-08-10 | 2019-05-07 | Bell Helicopter Textron Inc. | Rotorcraft variable thrust cross-flow fan systems |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2019115532A1 (de) | 2019-06-20 |
| AR113936A1 (es) | 2020-07-01 |
| US11479356B2 (en) | 2022-10-25 |
| EP3715249A1 (de) | 2020-09-30 |
| JP2021506650A (ja) | 2021-02-22 |
| EP3548378A1 (de) | 2019-10-09 |
| EP3548378B1 (de) | 2021-06-23 |
| CN111479750B (zh) | 2023-04-25 |
| DE102017011890B4 (de) | 2023-02-09 |
| BR112020011814A2 (pt) | 2020-11-17 |
| US20210229803A1 (en) | 2021-07-29 |
| CN111479750A (zh) | 2020-07-31 |
| AR123508A2 (es) | 2022-12-07 |
| EP3715249B1 (de) | 2021-06-23 |
| DE102017011890A1 (de) | 2019-06-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7157157B2 (ja) | 航空機用の推進装置及びそれを製造する方法 | |
| US8123483B2 (en) | To rotorcraft rotors fitted with inter-blade dampers | |
| RU2525356C2 (ru) | Винт вертолета и вертолет (варианты), содержащий этот винт | |
| CN210822748U (zh) | 周期性变桨控制系统和旋翼飞行器 | |
| RU2517643C2 (ru) | Винт вертолета и вертолет (варианты), содержащий этот винт | |
| CN105644780B (zh) | 尾部旋翼、平衡尾部旋翼的方法及旋翼飞行器 | |
| CA2956117A1 (en) | A propeller assembly with at least two propeller blades | |
| CN109866923A (zh) | 用于旋翼飞行器的、具有扭矩控制总距的旋翼组件 | |
| US8911209B2 (en) | Helicopter, rotor thereof, and control method thereof | |
| US20110027082A1 (en) | Method of reducing or even eliminating the vibration of a rotorcraft lift and propulsion rotor, and an airfoil assembly and a rotor implementing said method | |
| BR112015020873B1 (pt) | Conjunto de pás de passo variável e turbomáquina | |
| US8297928B2 (en) | Blade for reducing the drag movements of said blade, and a method of reducing such a drag movement | |
| US8226364B2 (en) | Blade provided with a resonator to reduce the drag movements of said blade, and a method implemented by said blade | |
| EP3755623A1 (en) | Rotor hub | |
| Yun et al. | A new VTOL UAV cyclocopter with cycloidal blades system | |
| US10654558B2 (en) | Rotor hub with enforced collective coning | |
| EP4234397A1 (en) | Compound helicopter | |
| US11203418B2 (en) | Mount systems for pylon assemblies with coaxial rotors | |
| EP3031719A1 (en) | Lift rotor for a rotorcraft, particularly for a gyroplane | |
| WO2017172000A2 (en) | Helicopter tail rotor blades and blade assemblies | |
| JP2004526093A (ja) | 気体または液体の作動媒体を用いるタービンのためのシステム | |
| US10875639B2 (en) | Bi-planer rotor blade | |
| US20230012688A1 (en) | Spring-integrated rotors | |
| US20210354813A1 (en) | Pulse-Induced Cyclic Control Lift Propeller | |
| CA3220601A1 (en) | Aircraft |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210910 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220616 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220621 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220912 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220927 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221006 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7157157 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |