JP7143728B2 - Superimposed image display device and computer program - Google Patents
Superimposed image display device and computer program Download PDFInfo
- Publication number
- JP7143728B2 JP7143728B2 JP2018209923A JP2018209923A JP7143728B2 JP 7143728 B2 JP7143728 B2 JP 7143728B2 JP 2018209923 A JP2018209923 A JP 2018209923A JP 2018209923 A JP2018209923 A JP 2018209923A JP 7143728 B2 JP7143728 B2 JP 7143728B2
- Authority
- JP
- Japan
- Prior art keywords
- warning
- image
- vehicle
- dimensional
- shape
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Landscapes
- Traffic Control Systems (AREA)
Description
本発明は、車両の走行支援を行う重畳画像表示装置及びコンピュータプログラムに関する。 The present invention relates to a superimposed image display device and a computer program for assisting driving of a vehicle.
従来より、車両の乗員に対して経路案内や障害物の警告等の車両の走行支援を行う為の各種情報を提供する情報提供手段として、様々な手段が用いられている。例えば、車両に設置された液晶ディスプレイによる表示や、スピーカから出力する音声等である。そして、近年、このような情報提供手段の一つとして、ヘッドアップディスプレイ(以下、HUDという)やウインドウシールドディスプレイ(以下、WSDという)のように運転者の周辺環境(風景)に重畳する画像を表示することによって、情報の提供を行う装置がある。 2. Description of the Related Art Conventionally, various means have been used as information providing means for providing various types of information for assisting vehicle travel, such as route guidance and warnings of obstacles, to occupants of the vehicle. For example, it is the display by the liquid crystal display installed in the vehicle, the sound output from the speaker, or the like. In recent years, as one of such information providing means, an image superimposed on the driver's surrounding environment (scenery) such as a head-up display (hereinafter referred to as HUD) or a window shield display (hereinafter referred to as WSD) has been introduced. There are devices that provide information by displaying.
例えば、特開2012-218505号公報には、車両に設置された赤外線カメラによって車両の前方領域を撮像するとともに、撮像した撮像画像内に位置する歩行者を検出し、撮像画像に加えて撮像画像中に位置する歩行者の周囲を囲む枠を液晶ディスプレイに対して表示する技術について開示されている。 For example, in Japanese Patent Laid-Open No. 2012-218505, an infrared camera installed in the vehicle captures an area in front of the vehicle, detects a pedestrian located in the captured image, and captures the captured image in addition to the captured image. A technique is disclosed for displaying a frame surrounding a pedestrian positioned inside on a liquid crystal display.
ここで、上記特許文献1に記載の技術では、撮像画像に対して平行な2次元の枠で警告対象物(歩行者等)を囲むことによって警告対象物の位置を警告するので、車両の乗員は撮像画像内における警告対象物の位置について把握することは可能となるが、警告対象物が存在する範囲を正確に特定することができない問題があった。
Here, in the technique described in
警告対象物の存在する範囲は、上下左右方向(車両の進行方向に対して交差する方向)に加えて奥行き方向(車両の進行方向)、即ち3次元的な空間で把握することが重要である。例えば、自転車等の一方向に長い警告対象物については、上記特許文献1のように上下左右方向のみで警告対象物の位置を把握し、奥行き方向に対してどのように警告対象物が存在しているかを把握できていないと、警告対象物を回避する為の運転操作を適切にできない虞がある。
It is important to grasp the range in which the object to be warned exists not only in the vertical and horizontal directions (the direction that intersects the traveling direction of the vehicle) but also in the depth direction (the traveling direction of the vehicle), that is, in a three-dimensional space. . For example, for a warning target object that is long in one direction, such as a bicycle, the position of the warning target object is grasped only in the vertical and horizontal directions as in the above-mentioned
本発明は前記従来における問題点を解消するためになされたものであり、警告対象物の存在する範囲を3次元的に把握させることが可能となり、警告対象物に対する警告をより確実に行うことを可能にした重畳画像表示装置及びコンピュータプログラムを提供することを目的とする。 SUMMARY OF THE INVENTION The present invention has been made to solve the above-mentioned problems in the prior art, and it is possible to three-dimensionally grasp the range in which an object to be warned exists, and to more reliably issue a warning to the object to be warned. It is an object of the present invention to provide a superimposed image display device and a computer program that make it possible.
前記目的を達成するため本発明に係る重畳画像表示装置は、車両に搭載され、車両の周辺に位置する警告対象物を警告する警告画像を、前記車両前方の風景に重畳して視認させる重畳画像表示装置であって、地図情報に基づいて車両の現在位置周辺に対応する3次元空間を生成する3次元空間生成手段と、3次元空間内における前記警告対象物が存在する位置に、前記警告対象物を模した仮想体を配置する仮想体配置手段と、3次元空間内に前記仮想体を囲む立体物である前記警告画像を配置する画像配置手段と、3次元空間内における車両の位置から前記警告画像と前記仮想体を両者視認した場合の前記警告画像の形状と前記仮想体の形状を夫々取得する形状取得手段と、前記形状取得手段によって取得された形状の前記警告画像とともに、前記形状取得手段によって取得された前記仮想体の形状を示す黒色画像を画像表示面に表示する画像表示手段と、を有し、前記画像表示面に表示された前記警告画像及び前記黒色画像を車両の乗員から視認可能な反射体に反射して車両の乗員に視認させることによって、前記画像表示面に表示された前記警告画像の虚像が前記警告対象物を囲む立体物として前記車両前方の風景に重畳して視認される。
尚、「警告対象物」とは、車両の乗員に対して、その存在を警告すべき対象物であり、
例えば歩行者、自転車、他車両等の動体物がある。また、動体物に限らずに、例えば信号機や道路標識などの静止物についても警告対象物に含めても良い。
In order to achieve the object, the superimposed image display device according to the present invention is mounted on a vehicle, and superimposes a warning image that warns of a warning object positioned around the vehicle on the scenery in front of the vehicle so that the superimposed image can be visually recognized. A display device, comprising: a three-dimensional space generating means for generating a three-dimensional space corresponding to the vicinity of a current position of a vehicle based on map information; virtual object arrangement means for arranging a virtual object imitating an object; image arrangement means for arranging the warning image, which is a three-dimensional object surrounding the virtual object, in a three-dimensional space; shape acquisition means for acquiring the shape of the warning image and the shape of the virtual object when both the warning image and the virtual object are visually recognized; and the shape acquisition together with the warning image of the shape acquired by the shape acquisition means and image display means for displaying a black image representing the shape of the virtual object acquired by said means on an image display surface, wherein said warning image and said black image displayed on said image display surface are transmitted from a vehicle occupant. A virtual image of the warning image displayed on the image display surface is superimposed on the scenery in front of the vehicle as a three-dimensional object surrounding the warning object by being reflected by a visible reflector and being visually recognized by a vehicle occupant. visible .
The "warning object" is an object whose presence should be warned to the occupants of the vehicle.
For example, there are moving objects such as pedestrians, bicycles, and other vehicles. Moreover, not only moving objects but also stationary objects such as traffic lights and road signs may be included in the warning objects.
また、本発明に係るコンピュータプログラムは、車両の走行支援を行うプログラムである。具体的には、車両に搭載され、車両の周辺に位置する警告対象物を警告する警告画像を、前記車両前方の風景に重畳して視認させる重畳画像表示装置を、地図情報に基づいて車両の現在位置周辺に対応する3次元空間を生成する3次元空間生成手段と、3次元空間内における前記警告対象物が存在する位置に、前記警告対象物を模した仮想体を配置する仮想体配置手段と、3次元空間内に前記仮想体を囲む立体物である前記警告画像を配置する画像配置手段と、3次元空間内における車両の位置から前記警告画像と前記仮想体を両者視認した場合の前記警告画像の形状と前記仮想体の形状を夫々取得する形状取得手段と、前記形状取得手段によって取得された形状の前記警告画像とともに、前記形状取得手段によって取得された前記仮想体の形状を示す黒色画像を画像表示面に表示する画像表示手段と、として機能させる為のコンピュータプログラムであって、前記画像表示面に表示された前記警告画像及び前記黒色画像を車両の乗員から視認可能な反射体に反射して車両の乗員に視認させることによって、前記画像表示面に表示された前記警告画像の虚像が前記警告対象物を囲む立体物として前記車両前方の風景に重畳して視認される。 Further, a computer program according to the present invention is a program for assisting driving of a vehicle. Specifically, a superimposed image display device, which is mounted on a vehicle and displays a warning image that warns of a warning target located in the vicinity of the vehicle, superimposed on the landscape in front of the vehicle, is displayed on the vehicle based on map information. A three-dimensional space generating means for generating a three-dimensional space corresponding to the vicinity of the current position, and a virtual object placement means for placing a virtual object simulating the warning object at the position where the warning object exists in the three-dimensional space. and image arrangement means for arranging the warning image, which is a three-dimensional object surrounding the virtual object, in a three-dimensional space; a shape obtaining means for obtaining a shape of a warning image and a shape of the virtual object; and a black color indicating the shape of the virtual object obtained by the shape obtaining means together with the warning image of the shape obtained by the shape obtaining means. and image display means for displaying an image on an image display surface, the computer program for displaying the warning image and the black image displayed on the image display surface on a reflector that is visible to the occupants of the vehicle. A virtual image of the warning image displayed on the image display surface is superimposed on the landscape in front of the vehicle and viewed as a three-dimensional object surrounding the warning object by being reflected and visually recognized by a vehicle occupant .
前記構成を有する本発明に係る重畳画像表示装置及びコンピュータプログラムによれば、警告画像として対象物を囲む立体物を表示することによって、車両の乗員に対して警告対象物の存在する範囲を3次元的に把握させることが可能となる。その結果、警告対象物に対する警告をより確実に行うことが可能となり、警告対象物を回避する為の運転操作を適切に行わせることができる。また、警告画像を虚像として表示する場合において、警告対象物の実像に対応する位置及び範囲に黒色画像を表示することによって、警告対象物と警告画像との前後関係を示す警告画像の虚像を車両の乗員に視認させることが可能となる。 According to the superimposed image display device and the computer program according to the present invention having the above configuration, by displaying a three-dimensional object surrounding the object as a warning image, the range in which the object of warning exists can be displayed to the occupant of the vehicle in three dimensions. It is possible to grasp the As a result, it becomes possible to issue a warning to the warning object more reliably, and to appropriately perform the driving operation for avoiding the warning object. In the case of displaying the warning image as a virtual image, by displaying a black image in the position and range corresponding to the real image of the warning object, the virtual image of the warning image showing the anteroposterior relationship between the warning object and the warning image can be displayed on the vehicle. can be visually recognized by the occupant.
以下、本発明に係る重畳画像表示装置を具体化した一実施形態に基づき図面を参照しつつ詳細に説明する。先ず、本実施形態に係る重畳画像表示装置1の概略構成について図1を用いて説明する。図1は本実施形態に係る重畳画像表示装置1の概略構成図である。
BEST MODE FOR CARRYING OUT THE INVENTION An embodiment of a superimposed image display device according to the present invention will be described in detail below with reference to the drawings. First, a schematic configuration of a superimposed
図1に示すように重畳画像表示装置1は、車両2に搭載されたナビゲーション装置3と、同じく車両2に搭載されるとともにナビゲーション装置3と接続されたヘッドアップディスプレイ装置(以下、HUDという)4とを基本的に有する。
As shown in FIG. 1, the superimposed
ここで、ナビゲーション装置3は、目的地までの推奨経路を探索したり、サーバから取得したりメモリに格納された地図データに基づいて車両2の現在位置周辺の地図画像を表示したり、障害物等の警告対象物に対する警告を行ったり、設定された案内経路に沿った走行案内をHUD4とともに行う機能を有する。尚、上記機能の全てをナビゲーション装置3が備えている必要はなく、少なくとも警告対象物に対する警告を行う機能を有していれば本願発明を構成することが可能である。尚、ナビゲーション装置3の構造の詳細については後述する。
Here, the
一方、HUD4は、車両2のダッシュボード5内部に設置されており、内部には映像が表示される映像表示面である液晶ディスプレイ6を有する。そして、液晶ディスプレイ6に投射された映像を、後述のようにHUD4が備える凹面鏡7等を介し、更に運転席の前方のフロントウィンドウ8に反射させて車両2の乗員9に視認させるように構成されている。尚、液晶ディスプレイ6に表示される映像としては、車両2に関する情報や乗員9の運転の支援の為に用いられる各種情報がある。例えば乗員9に対して警告対象となる対象物(他車両や歩行者)に対する警告、ナビゲーション装置3で設定された案内経路や案内経路に基づく案内情報(右左折方向を示す矢印等)、路面に表示する警告(追突注意、制限速度等)、現在車速、広告画像、案内標識、地図画像、交通情報、ニュース、天気予報、時刻、接続されたスマートフォンの画面、テレビ番組等がある。
On the other hand, the
また、本実施形態のHUD4では、フロントウィンドウ8を反射して乗員9が液晶ディスプレイ6に表示された映像を視認した場合に、乗員9にはフロントウィンドウ8の位置ではなく、フロントウィンドウ8の先の遠方の位置に液晶ディスプレイ6に表示された映像が虚像10として視認されるように構成される。また、虚像10は車両前方の風景(実景)に重畳して表示されることとなり、例えば車両前方に位置する任意の対象物(路面、建築物、警告対象となる動体物等)に重畳させて表示させることも可能である。尚、乗員9が視認できる虚像10は液晶ディスプレイ6に表示された映像であるが、凹面鏡7やその他のミラーを介することによって上下方向や左右方向が反転する場合があり、それらの反転を考慮して液晶ディスプレイ6の映像の表示を行う必要がある。また、凹面鏡7を介することによってサイズも変更する。
In addition, in the
ここで、虚像10を生成する位置、より具体的には乗員9から虚像10までの距離(以下、結像距離という)Lについては、HUD4が備える凹面鏡7の曲率、液晶ディスプレイ6と凹面鏡7との相対位置等によって適宜設定することが可能である。例えば、凹面鏡7の曲率が固定であれば、液晶ディスプレイ6において映像の表示された位置から凹面鏡7までの光路に沿った距離(光路長)によって結像距離Lが決定される。例えば結像距離Lが2.5mとなるように光路長が設定されている。
Here, the position where the
また、本実施形態では車両前方の風景に重畳する画像を表示する手段としてHUD4を用いているが、他の手段を用いても良い。例えば、フロントウィンドウ8に対して映像を表示するウインドウシールドディスプレイ(WSD)を用いても良い。WSDでは、フロントウィンドウ8をスクリーンとしてプロジェクタから映像を表示しても良いし、フロントウィンドウ8を透過液晶ディスプレイとしても良い。WSDによってフロントウィンドウ8に対して表示された画像は、HUD4と同様に車両前方の風景に重畳する画像となる。
Also, in this embodiment, the
更に、後述のフロントカメラ11で撮像した車両前方の風景を車内の液晶ディスプレイに表示し、同一の液晶ディスプレイ内において表示された風景に重畳する画像を表示することも可能である。その場合においても液晶ディスプレイに表示された画像は、HUD4と同様に車両前方の風景に重畳する画像となる。
Furthermore, it is possible to display the scenery in front of the vehicle captured by the
また、車両のフロントバンパの上方やルームミラーの裏側等にはフロントカメラ11が設置される。フロントカメラ11は、例えばCCD等の固体撮像素子を用いたカメラを有する撮像装置であり、光軸方向を車両の進行方向前方に向けて設置される。そして、フロントカメラ11により撮像された撮像画像に対して画像処理が行われることによって、フロントウィンドウ8越しに乗員9に視認される前方環境(即ち虚像10が重畳される環境)の状況等が検出される。尚、フロントカメラ11の代わりにミリ波レーダ等のセンサを用いても良い。
A
また、車両のインストルメントパネルの上面には車内カメラ12が設置される。車内カメラ12は、例えばCCD等の固体撮像素子を用いたカメラを有する撮像装置であり、光軸方向を運転席に向けて設置される。そして、運転席に座った乗員9の顔を撮像する。そして、車内カメラ12により撮像された撮像画像に対して画像処理が行われることによって、乗員9の目の位置(視線開始点)や視線方向を検出する。
In addition, an in-
次に、上記重畳画像表示装置1を構成するナビゲーション装置3の概略構成について図2を用いて説明する。図2は本実施形態に係るナビゲーション装置3を示したブロック図である。
Next, a schematic configuration of the
図2に示すように本実施形態に係るナビゲーション装置3は、ナビゲーション装置3が搭載された車両2の現在位置を検出する現在位置検出部13と、各種のデータが記録されたデータ記録部14と、入力された情報に基づいて、各種の演算処理を行うナビゲーションECU15と、ユーザからの操作を受け付ける操作部16と、ユーザに対して車両周辺の地図や施設の関する施設情報を表示する液晶ディスプレイ17と、経路案内に関する音声ガイダンスを出力するスピーカ18と、記憶媒体であるDVDを読み取るDVDドライブ19と、VICS(登録商標:Vehicle Information and Communication System)センタ等の情報センタとの間で通信を行う通信モジュール20と、を有する。また、ナビゲーション装置3はCAN等の車載ネットワークを介して、前述したHUD4、フロントカメラ11及び車内カメラ12等が接続されている。
As shown in FIG. 2, the
以下に、ナビゲーション装置3が有する各構成要素について順に説明する。
現在位置検出部13は、GPS21、車速センサ22、ステアリングセンサ23、ジャイロセンサ24等からなり、現在の車両の位置、方位、車両の走行速度、現在時刻等を検出することが可能となっている。ここで、特に車速センサ22は、車両の移動距離や車速を検出する為のセンサであり、車両の駆動輪の回転に応じてパルスを発生させ、パルス信号をナビゲーションECU15に出力する。そして、ナビゲーションECU15は発生するパルスを計数することにより駆動輪の回転速度や移動距離を算出する。尚、上記4種類のセンサをナビゲーション装置3が全て備える必要はなく、これらの内の1又は複数種類のセンサのみをナビゲーション装置3が備える構成としても良い。
Each component of the
The current
また、データ記録部14は、外部記憶装置及び記録媒体としてのハードディスク(図示せず)と、ハードディスクに記録された地図情報DB31や所定のプログラム等を読み出すとともにハードディスクに所定のデータを書き込む為のドライバである記録ヘッド(図示せず)とを備えている。尚、データ記録部14はハードディスクの代わりにフラッシュメモリやメモリーカードやCDやDVD等の光ディスクを有していても良い。また、地図情報DB31は外部のサーバに格納させ、ナビゲーション装置3が通信により取得する構成としても良い。
The
ここで、地図情報DB31は、2次元地図情報33と3次元地図情報34とがそれぞれ記憶される。2次元地図情報33は、一般的なナビゲーション装置3において用いられる地図情報であり、例えば、道路(リンク)に関するリンクデータ、ノード点に関するノードデータ、施設に関する施設データ、経路探索処理に用いられる探索データ、地図を表示するための地図表示データ、各交差点に関する交差点データ、地点を検索するための検索データ等を含む。
Here, the
一方、3次元地図情報34は、平面だけではなく高さ情報についても有し、3次元で地図を表現する為の地図情報である。特に本実施形態では3次元で道路の輪郭、建築物の形状、道路の区画線、信号機、道路標識、看板等を表現する為の地図情報とする。尚、3次元地図情報34としては上記道路の輪郭、建築物の形状、道路の区画線、信号機、道路標識、看板以外の情報についても含めても良い。例えば、街路樹や路面標示等についても3次元で表現する為の情報を含めても良い。また、3次元地図情報34としては3次元空間上に上記道路の輪郭、建築物の形状、道路の区画線、信号機、道路標識、看板等の各オブジェクトを配置した地図そのものを記憶しても良いし、3次元で地図を表現する為に必要な情報(道路の輪郭、建築物の形状、道路の区画線、信号機、道路標識、看板等の3次元の座標データなど)を記憶しても良い。3次元で地図を表現する為に必要な情報が格納されている場合には、ナビゲーション装置3は、必要なタイミングで3次元地図情報34として記憶された情報を用いて、対象エリアを3次元で表現した地図を生成する。
On the other hand, the
そして、ナビゲーション装置3は、液晶ディスプレイ17における地図画像の表示、案内経路の探索等の一般的な機能については2次元地図情報33を用いて行う。また、後述のように警告画像の表示に係る処理については2次元地図情報33に加えて3次元地図情報34についても用いて行う。
The
一方、ナビゲーションECU(エレクトロニック・コントロール・ユニット)15は、ナビゲーション装置3の全体の制御を行う電子制御ユニットであり、演算装置及び制御装置としてのCPU41、並びにCPU41が各種の演算処理を行うにあたってワーキングメモリとして使用されるとともに、経路が探索されたときの経路データ等が記憶されるRAM42、制御用のプログラムのほか、後述の走行支援処理プログラム(図3)等が記録されたROM43、ROM43から読み出したプログラムを記憶するフラッシュメモリ44等の内部記憶装置を備えている。尚、ナビゲーションECU15は、処理アルゴリズムとしての各種手段を有する。例えば、撮像画像取得手段は、車両前方の風景を撮像した撮像画像を取得する。地図情報取得手段は、3次元地図情報を取得する。照合手段は、撮像画像と3次元地図情報を照合する。画像配置手段は、照合手段の照合結果に基づいて、3次元地図情報内における警告対象物が存在する位置に警告画像を配置する。形状取得手段は、3次元地図情報内における車両の位置から警告画像を視認した場合の警告画像の形状を取得する。
On the other hand, a navigation ECU (electronic control unit) 15 is an electronic control unit that controls the
操作部16は、走行開始地点としての出発地及び走行終了地点としての目的地を入力する際等に操作され、各種のキー、ボタン等の複数の操作スイッチ(図示せず)を有する。そして、ナビゲーションECU15は、各スイッチの押下等により出力されるスイッチ信号に基づき、対応する各種の動作を実行すべく制御を行う。尚、操作部16は液晶ディスプレイ17の前面に設けたタッチパネルを有していても良い。また、マイクと音声認識装置を有していても良い。
The
また、液晶ディスプレイ17には、道路を含む地図画像、交通情報、操作案内、操作メニュー、キーの案内、出発地から目的地までの案内経路、案内経路に沿った案内情報、ニュース、天気予報、時刻、メール、テレビ番組等が表示される。尚、本実施形態では情報の表示手段としてHUD4を備えているので、上記地図画像等の表示をHUD4で行う構成とすれば液晶ディスプレイ17は省略しても良い。
The
また、スピーカ18は、ナビゲーションECU15からの指示に基づいて案内経路に沿った走行を案内する音声ガイダンスや、交通情報の案内を出力する。
In addition, the
また、DVDドライブ19は、DVDやCD等の記録媒体に記録されたデータを読み取り可能なドライブである。そして、読み取ったデータに基づいて音楽や映像の再生、地図情報DB31の更新等が行われる。尚、DVDドライブ19に替えてメモリーカードを読み書きする為のカードスロットを設けても良い。
Also, the
また、通信モジュール20は、交通情報センタ、例えば、VICSセンタやプローブセンタ等から送信された渋滞情報、規制情報、交通事故情報等の各情報から成る交通情報を受信する為の通信装置であり、例えば携帯電話機やDCMが該当する。
The
続いて、前記構成を有する重畳画像表示装置1の内、特にナビゲーション装置3において実行する走行支援処理プログラムについて図3に基づき説明する。図3は本実施形態に係る走行支援処理プログラムのフローチャートである。ここで、走行支援処理プログラムは車両のACC電源(accessory power supply)がONされた後に実行され、HUD4を用いて、車両2の乗員9に車両の周辺に位置する警告対象物に対する警告を行うプログラムである。尚、以下の図3にフローチャートで示されるプログラムは、ナビゲーション装置3が備えているRAM42やROM43に記憶されており、CPU41により実行される。
Next, the driving support processing program executed especially in the
尚、「警告対象物」とは、車両の乗員に対して、その存在を警告すべき対象物であり、例えば歩行者、自転車、他車両等の動体物がある。また、動体物に限らずに、例えば信号機や道路標識などの静止物についても警告対象物に含めても良い。但し、以下の説明では自車両が進行路に沿って進行する場合に影響のある動体物を警告対象物とし、より具体的には、車両の進行路と今後の進行路が重複する動体物を警告対象物とする。 The "warning object" is an object whose presence should be warned to the occupants of the vehicle, and includes moving objects such as pedestrians, bicycles, and other vehicles. Moreover, not only moving objects but also stationary objects such as traffic lights and road signs may be included in the warning objects. However, in the following explanation, the warning target is a moving object that has an impact when the own vehicle travels along the traveling path. Make it a warning target.
先ず、走行支援処理プログラムでは、ステップ(以下、Sと略記する)1においてCPU41は、フロントカメラ11によって車両前方の風景を撮像した撮像画像を取得する。更に、CPU41は、地図情報DB31から車両の現在位置周辺の3次元地図情報34を読み出す。尚、3次元地図情報34には、3次元で地図を表現する為に必要な情報(道路の輪郭、建築物の形状、道路の区画線、信号機、道路標識、看板等の3次元の座標データなど)が記憶される。
First, in the driving support processing program, in step (hereinafter abbreviated as S) 1, the
次に、S2においてCPU41は、前記S1で読み出した3次元地図情報34に基づいて、車両の現在位置周辺を示す3次元立体地図(3次元で建物や道路等を表現した地図)を生成する。具体的には、以下の処理を実行することにより3次元立体地図を生成する。
Next, in S2, the
先ず、CPU41は、3次元地図情報34から3次元空間上に道路、建築物、道路標識、看板等をモデリングしたオブジェクト(形状データ)を取得する。尚、CPU41は、予めモデリングしてDBに格納しておいたオブジェクトの内、該当するオブジェクトを取得する構成としても良いし、S2においてモデリングを実施してオブジェクトを新たに作成する構成としても良い。モデリングを実施する場合には、3次元地図情報34から道路及び道路周辺にある構造物(建築物、道路標識、看板等)の形状や位置を特定する情報を取得し、取得した情報に基づいてモデリング処理を行う。
First, the
ここで、モデリングとは3次元空間上においてモデル(物体)の形状を作成する処理であり、より具体的には各頂点の座標の決定や、境界線、面を表現する方程式のパラメータの決定などを行う。尚、モデリングについては公知の技術であるので詳細は省略する。そして、モデリングされたオブジェクト(形状データ)は、用途に応じて辺のみ表示する「ワイヤーフレームモデル」、面を表示する「サーフィスモデル」等の形で表現される。そして各オブジェクトが形成された3次元空間を3次元立体地図とする。 Here, modeling is the process of creating the shape of a model (object) in a three-dimensional space, and more specifically, determination of the coordinates of each vertex, determination of parameters of equations that express boundary lines and surfaces, etc. I do. Since the modeling is a well-known technique, the details will be omitted. The modeled object (shape data) is expressed in the form of a "wireframe model" that displays only sides, a "surface model" that displays surfaces, or the like, depending on the application. A three-dimensional space in which each object is formed is defined as a three-dimensional map.
また、前記S2でCPU41は、現在位置検出部13で検出されたパラメータに基づいて、生成された3次元立体地図における自車両の現在位置及び方位についても特定する。尚、後述の3次元立体地図と撮像画像との照合の処理を容易化する為に、自車両の現在位置は特に自車両に設置されたフロントカメラ11の設置位置とし、自車両の方位はフロントカメラ11の光軸方向とするのが望ましい。
In S2, the
更に、CPU41は、前記S1で取得した車両前方の風景を撮像した撮像画像に対して画像処理を行うことによって、車両前方周辺に存在する静止物や動体物の位置や形状について検出する。尚、静止物としては例えば人工的な構造物(建築物、道路標識、看板等)や自然物(樹木等)が該当し、動体物としては例えば他車両、人、自転車等が該当する。そして、3次元地図情報34に対して含まれない静止物や動体物が検出された場合には、検出された静止物や動体物について、位置や形状を特定する情報を3次元立体地図に含める。尚、S2では検出された静止物や動体物について3次元立体地図上にモデリングする必要は無いが、モデリングまで行っても良い。
Furthermore, the
ここで、図4は前記S2で生成される3次元立体地図51の一例を示した図である。図4に示すように3次元立体地図51には、3次元空間に対して、道路や構造物(建築物、道路標識、看板等)を示す各オブジェクト52が配置される。特に車両の現在位置周辺に位置する道路や構造物を示す各オブジェクト52が配置される。また、3次元立体地図51には自車両の現在位置と方位を示す自車位置マーク53についても配置される。
Here, FIG. 4 is a diagram showing an example of the three-
続いてS3においてCPU41は、前記S1で取得した撮像画像と前記S2で生成された3次元立体地図とを照合し、両者の間にズレが生じていないかを判定する。具体的にはCPU41は、3次元立体地図に設定されている自車両の現在位置(より具体的にはフロントカメラ11の設置位置であり高さも考慮する)を視点とし、自車両の方位を視線方向に設定し、設定された視点及び視線方向によって3次元立体地図を視認した際の像と、撮像画像とを照合する。尚、3次元立体地図には、歩行者や他車両等の動体物、樹木などの一部の固定物については含まれないので、それらに起因するズレは基本的には無視して判定する。また、ズレが生じていないとは両者が完全に一致する場合のみに限らず、ある程度の許容範囲内のズレが生じている場合においてもズレが生じていないとみなすのが望ましい。
Subsequently, in S3, the
そして、前記S1で取得した撮像画像と前記S2で生成された3次元立体地図との間にズレが生じていないと判定された場合(S3:YES)には、S5へと移行する。それに対して、前記S1で取得した撮像画像と前記S2で生成された3次元立体地図との間にズレが生じていると判定された場合(S3:NO)には、S4へと移行する。 If it is determined that there is no deviation between the captured image acquired in S1 and the three-dimensional map generated in S2 (S3: YES), the process proceeds to S5. On the other hand, if it is determined that there is a discrepancy between the captured image acquired in S1 and the three-dimensional map generated in S2 (S3: NO), the process proceeds to S4.
S4においてCPU41は、前記S2で生成された3次元立体地図について、前記S1で取得した撮像画像と間のズレが小さくなるように3次元立体地図内に設定された自車両の現在位置及び方位を補正する。尚、3次元立体地図における自車両の現在位置及び方位は固定してオブジェクト側を補正しても良い。それによって、3次元立体地図内における正確な自車両の現在位置及び方位(より具体的にはフロントカメラ11の設置位置と光軸方向)を特定することが可能となる。その後、S3へと戻る。
In S4, the
一方、S5においてCPU41は、自車両の周辺に位置する警告対象物を検出する。本実施形態では特に車両の進行方向前方において乗員9が視認可能な範囲に位置する警告対象物を検出対象とし、フロントカメラ11で撮像した撮像画像に対して画像処理を行うことにより検出される。また、“警告対象物”とは、上述したように自車両が進行路に沿って進行する場合に影響のある動体物とし、より具体的には、車両の進行路と今後の進行路が重複する動体物を警告対象物とする。尚、動体物の今後の進行路についてはフレーム間の撮像画像中における動体物の位置の変位に基づいて特定される。
On the other hand, in S5, the
例えば、図5に示すように車両の進行方向前方に歩行者55と自転車56が検出された場合であって、且つ自車両が前方の交差点57で左折する場合を挙げて説明する。また、歩行者55の進行路(進行方向)が、案内分岐点の左側に接続する道路を横断する進行路に特定され、自転車56の進行路(進行方向)が、交差点57の左側に接続する道路を横断せずに交差点57から離れる方向へと移動する進行路に特定されたと仮定する。
図5に示す例においては、歩行者55の今後の進行路と自車両の進行路とが重複することとなるので、歩行者55は警告対象物であると判定される。一方で、自転車56の今後の進行路と自車両の進行路とは重複しない。従って、自転車56は警告対象物ではないと判定される。
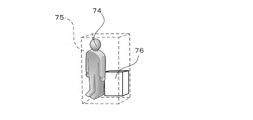
For example, as shown in FIG. 5, a case where a
In the example shown in FIG. 5, the
また、前記S5でCPU41は、撮像画像に基づいて警告対象物の位置、種類(特定できる場合のみ)、形状についても特定する。
Further, in S5, the
その後、S6においてCPU41は、後述の警告対象領域決定処理(図9)を行う。警告対象領域決定処理では、上記S5で検出された警告対象物を警告する領域(以下、警告対象領域という)を決定する。尚、警告対象領域は、詳細については後述するが、3次元空間において特定され、警告対象物を囲む立体物、より具体的には警告対象物の全てを囲む最小の直方体とする。そして、警告対象領域は後述の警告画像を表示する領域にも相当する。
After that, in S6, the
続いて、S7においてCPU41は、S5で検出された警告対象物を警告する警告画像を、前記S2で生成された3次元立体地図に対して配置する。尚、警告画像は、前記S6で決定された警告対象領域に対して表示する。即ち、警告画像は3次元形状を有し、警告対象物を囲む立体物、より具体的には警告対象物の全てを囲む最小の直方体とする。但し、警告画像は囲んだ警告対象物が車両の乗員から視認できるように、直方体の面は有さない枠のみの形状とする。
Subsequently, in S7, the
次に、S8においてCPU41は、自車両の周辺で検出された警告対象物のモデル(警告対象物の仮想体であり、以下、対象物仮想体という)を、前記S2で生成された3次元立体地図に対して警告対象物が検出された位置に配置する。複数の警告対象物が検出された場合には、検出された全ての警告対象物について対象物仮想体を3次元立体地図に対して配置する。尚、3次元立体地図に対して配置される対象物仮想体は実際の警告対象物の形状を模した形状とする。例えば歩行者であれば人の形状を有する対象物仮想体とし、車両であれば車両の形状を有する対象物仮想体とする。サイズについても実際の警告対象物のサイズと対応させる。
Next, in S8, the
但し、車両に生じる振動等によって乗員から視認できる警告対象物の位置がブレることを考慮して、対象物仮想体のサイズは実際の警告対象物のサイズよりもやや大きいサイズ(例えば110%)とするのが望ましい。また、全体的に均等にサイズを広げるのではなく、相対的な移動方向(車両の乗員からみて警告対象物が移動する方向)に対して大きくサイズを広げるのが望ましい。尚、警告対象物が不定形である(形状や種類を特定できない)場合には、例外的に対象物仮想体は該警告対象物の全てを含む最小の直方体とする。 However, considering that the position of the warning target that can be visually recognized by the occupant may be blurred due to vibrations that occur in the vehicle, the size of the virtual target object is slightly larger than the actual size of the warning target (for example, 110%). It is desirable to In addition, it is desirable to increase the size significantly in the direction of relative movement (the direction in which the object to be warned moves from the vehicle occupant's point of view), instead of increasing the size uniformly overall. If the object to be warned has an irregular shape (its shape and type cannot be specified), the virtual object object is exceptionally the smallest rectangular parallelepiped that includes all of the object to be warned.
また、3次元立体地図に対して配置される対象物仮想体は全面黒色で表示されたオブジェクトとする。一方、前記S7で配置される警告画像については黒色以外(例えば赤色や黄色)で表示された画像とする。 In addition, it is assumed that the object virtual object placed on the three-dimensional map is an object displayed entirely in black. On the other hand, the warning image arranged in S7 is an image displayed in a color other than black (for example, red or yellow).
ここで、図6は3次元立体地図51に対して警告対象物の対象物仮想体60及び警告画像61を配置した図である。尚、図6に示す例では対象物仮想体60は歩行者を示している。即ち、自車両の周辺には警告対象物として歩行者が存在することを示している。一方、警告画像61は、対象物仮想体60の全てを囲む最小の直方体の枠形状を有する。
Here, FIG. 6 is a diagram in which a
その後、S9においてCPU41は、先ず対象物仮想体や警告画像が配置された3次元立体地図を、車両(乗員)の視点から車両の進行方向に視認した画像(以下、視認画像という)を取得する。特に車両の視点は車両の乗員の目の位置とする。尚、乗員の目の位置については車内カメラ12によって検出することが可能である。即ち、取得された視認画像は3次元立体地図に配置された各オブジェクト(道路、建築物、道路標識、看板、警告画像、対象物仮想体等)を車両(乗員)の視点から車両の進行方向に視認した際に視認できる像であり、車両の乗員の視界に相当する。尚、視認画像については車両(乗員)の視点から視認した画像であれば、必ずしも車両の進行方向に視認した画像である必要は無い。但し、少なくとも視認画像に警告画像と対象物仮想体が含まれる必要はある。
After that, in S9, the
続いて、前記S9においてCPU41は、視認画像に含まれる警告画像の形状及び対象物仮想体の形状を、HUD4により表示対象とする画像の形状として夫々記憶する。ここで、前記S9で記憶される警告画像の形状は、3次元立体地図に配置された各オブジェクト(道路、建築物、道路標識、看板、対象物仮想体、警告画像等)を車両(乗員)の視点から視認した際に視認できる警告画像の形状である。一方、視認画像に含まれる対象物仮想体の形状は、3次元立体地図に配置された各オブジェクト(道路、建築物、道路標識、看板、対象物仮想体、警告画像等)を車両(乗員)の視点から視認した際に視認できる対象物仮想体の形状である。従って、例えば前記S9で記憶される警告画像の形状は、図7に示すように警告画像61よりも手前側に位置する対象物仮想体60と重なって視認される場合には、重なる部分については除かれた形状となる。一方で、前記S9で記憶される対象物仮想体の形状は、図7に示すように対象物仮想体60よりも手前側に位置する警告画像61と重なって視認される場合には、重なる部分については除かれた形状となる。
Subsequently, in S<b>9 , the
更に、S10においてCPU41は、3次元立体地図において配置された警告画像の位置を取得する。具体的には前記S7で決定された警告対象領域の位置が相当し、自車両周辺に位置する警告対象物を囲む位置となる。同じく、CPU41は3次元立体地図において配置された対象物仮想体の位置についても取得する。具体的には警告対象物が存在する位置となる。
Furthermore, in S10, the
その後、S11においてCPU41は、後述の表示範囲決定処理(図13)を行う。表示範囲決定処理では、HUD4において警告画像及び黒色画像を表示する範囲(フロントウィンドウ8に対して警告画像及び黒色画像を投影する範囲、或いはHUD4の液晶ディスプレイ6に対して警告画像及び黒色画像を表示する範囲)を決定する。
Thereafter, in S11, the
続いて、S12においてCPU41は、HUD4に対して制御信号を送信し、HUD4の液晶ディスプレイ6に対して前記S9で記憶された形状の警告画像を、前記S11で決定された表示範囲に表示する。同じく、CPU41は前記S9で記憶された対象物仮想体の形状を有する黒色画像を、前記S11で決定された表示範囲に表示する。尚、警告画像と黒色画像は基本的に一体の画像として表示する。また、3次元立体地図に対して配置される対象物仮想体は必ずしも黒色である必要は無いが、その場合であっても対象物仮想体に応じて液晶ディスプレイ6に表示する画像は黒色の画像とする。
Subsequently, at S12, the
ここで、液晶ディスプレイ6に表示された画像を車両の乗員が視認する場合において、液晶ディスプレイ6に表示された画像が黒色画像である場合には黒色画像の虚像は視認できない(透過状態となる)。従って、黒色画像が警告対象物を重畳する位置に表示されていたとしても、車両の乗員からは黒色画像の虚像は視認されず(より正確には透過状態で視認される)、警告対象物のみが視認されることとなる。
Here, when the image displayed on the
その結果、図8に示すように液晶ディスプレイ6に表示された警告画像61及び黒色画像66を車両の乗員が視認した場合には、黒色画像66に対応する部分(即ち実景の警告対象物と重複する部分)については虚像が視認されない(透過状態となる)。また、警告画像61の虚像67については、警告対象物68に隠れて視認できない部分(図8右図の破線部分)については黒色画像66によって視認できない一方、それ以外の部分(図8右図の実線部分)については視認される。その結果、乗員は警告画像61の虚像67の形状から警告対象物68の位置と、警告画像61の虚像67の位置との前後関係を認識することができ、警告画像61によって警告対象となる警告対象物68を正確に把握できる。
As a result, as shown in FIG. 8, when the occupant of the vehicle visually recognizes the
尚、液晶ディスプレイ6に対して警告画像及び黒色画像を描画する場合に、異なるレイヤで描画するようにしても良い。順序として、手前側に位置するものをより上位(上層)のレイヤで描画する。具体的には、対象物仮想体よりも奥側に位置する警告画像のフレーム部分を最も下位のレイヤで描画する。次に対象物仮想体に対応する黒色画像を中位のレイヤで描画し、対象物仮想体よりも手前に位置する警告画像のフレーム部分を最も上位のレイヤで描画する。その場合には、警告画像61や黒色画像66の全形を描画したとしても、図8に示す警告画像61の虚像67を車両の乗員に視認させることが可能となる。
When drawing the warning image and the black image on the
次に、前記S6において実行される警告対象領域決定処理のサブ処理について図9に基づき説明する。図9は警告対象領域決定処理のサブ処理プログラムのフローチャートである。 Next, a sub-process of the warning target area determination process executed in S6 will be described with reference to FIG. FIG. 9 is a flowchart of a sub-processing program of the warning target area determination process.
先ず、S21においてCPU41は、前記S5の警告対象物の検出処理の結果、車両の進行方向前方における乗員9の視認可能な範囲に少なくとも一以上の警告対象物が存在するか否かを判定する。
First, in S21, the
そして、車両の進行方向前方における乗員9の視認可能な範囲に少なくとも一以上の警告対象物が存在すると判定された場合(S21:YES)には、S22へと移行する。それに対して、車両の進行方向前方における乗員9の視認可能な範囲に警告対象物が存在しないと判定された場合(S21:NO)には、警告対象領域を設定することなく終了する。
Then, when it is determined that at least one or more warning objects exist within the visible range of the
S22においてCPU41は、特に車両の進行方向前方における乗員9の視認可能な範囲に複数の警告対象物が存在するか否かを判定する。
In S<b>22 , the
そして、車両の進行方向前方における乗員9の視認可能な範囲に複数の警告対象物が存在すると判定された場合(S22:YES)には、S26へと移行する。それに対して、車両の進行方向前方における乗員9の視認可能な範囲に警告対象物が一のみ存在すると判定された場合(S22:NO)には、S23へと移行する。
Then, when it is determined that a plurality of warning objects exist within the visible range of the
S23においてCPU41は、警告対象物と一部が接続するとともに、警告対象物と同一方向に同一速度で移動する付随対象物があるか否か判定する。例えば、歩行者がトランク等の荷物を引いている場合には、歩行者は警告対象物として検出され、トランクは付随対象物として検出される。或いは、歩行者が犬を連れていている場合には、歩行者は警告対象物として検出され、犬は付随対象物として検出される。尚、付随対象物の検出については、警告対象物と同様にフロントカメラ11で撮像した撮像画像に対する画像処理を行うことによって行われる。また、付随対象物についても警告対象物と同様に、付随対象物のモデル(仮想体)が3次元立体地図に対して検出された位置に配置される。
In S23, the
そして、警告対象物と一部が接続するとともに、警告対象物と同一方向に同一速度で移動する付随対象物があると判定された場合(S23:YES)には、S25へと移行する。それに対して、付随対象物が存在しないと判定された場合(S23:NO)には、S24へと移行する。 If it is determined that there is an accompanying object that is partly connected to the warning object and moves in the same direction and at the same speed as the warning object (S23: YES), the process proceeds to S25. On the other hand, when it is determined that the accompanying object does not exist (S23: NO), the process proceeds to S24.
S24においてCPU41は、図10に示すように警告対象物74の全体を囲む最小の直方体を警告対象領域75に決定する。実際には3次元立体地図に配置された警告対象物74の仮想体を用いて、3次元立体地図上において警告対象領域75を決定する。その後、S8へと移行する。
In S24, the
また、S25においてCPU41は、図11に示すように警告対象物74と付随対象物76を両方囲む最小の直方体を警告対象領域75に決定する。実際には3次元立体地図に配置された警告対象物74と付随対象物76の仮想体を用いて、3次元立体地図上において警告対象領域75を決定する。その後、S8へと移行する。
Further, in S25, the
一方、S26においてCPU41は、検出された複数の警告対象物の内、所定範囲(例えば2m四方)内に複数の警告対象物があって、且つ所定範囲内に位置する各警告対象物が同一方向に同一速度で移動するか否かを判定する。尚、警告対象物の移動方向や移動速度については、フレーム間の撮像画像中における警告対象物の位置の変位に基づいて特定される。
On the other hand, in S26, the
そして、検出された複数の警告対象物の内、所定範囲内に複数の警告対象物があって、且つ所定範囲内に位置する各警告対象物が同一方向に同一速度で移動すると判定された場合(S26:YES)には、S28へと移行する。それに対して、所定範囲内に複数の警告対象物が位置しない、或いは所定範囲内に位置したとしても各警告対象物が同一方向に同一速度で移動しないと判定された場合(S26:NO)には、S27へと移行する。 Then, when it is determined that among the plurality of detected warning objects, there are a plurality of warning objects within a predetermined range, and each warning object positioned within the predetermined range moves in the same direction at the same speed. If (S26: YES), the process proceeds to S28. On the other hand, if it is determined that a plurality of warning objects are not located within the predetermined range, or that each warning target does not move in the same direction and at the same speed even if they are located within the predetermined range (S26: NO) moves to S27.
S27においてCPU41は、図10に示すように検出された複数の警告対象物74毎に、警告対象物74の全体を囲む最小の直方体を警告対象領域75に決定する。従って、例えば警告対象物74が3個あれば、警告対象領域75も3個設定されることとなる。実際には3次元立体地図に配置された複数の警告対象物74の仮想体を用いて、3次元立体地図上において警告対象領域75を決定する。尚、複数の警告対象物の内、特に付随対象物が存在する警告対象物については、S25と同様に警告対象物と付随対象物を両方囲む最小の直方体を警告対象領域に決定するのが望ましい。その後、S8へと移行する。
In S27, the
一方、S28においてCPU41は、図12に示すように検出された複数の警告対象物74の全てをまとめて囲む最小の直方体を警告対象領域75に決定する。実際には3次元立体地図に配置された複数の警告対象物74の仮想体を用いて、3次元立体地図上において警告対象領域75を決定する。尚、更に付随対象物が存在する場合については、複数の警告対象物に加えて付随対象物についても囲む最小の直方体を警告対象領域に決定するのが望ましい。その後、S8へと移行する。
On the other hand, in S28, the
次に、前記S11において実行される表示範囲決定処理のサブ処理について図13に基づき説明する。図13は表示範囲決定処理のサブ処理プログラムのフローチャートである。 Next, sub-processing of the display range determination processing executed in S11 will be described with reference to FIG. FIG. 13 is a flowchart of a sub-processing program for display range determination processing.
先ず、S31においてCPU41は、車両の乗員の目の位置を車内カメラ12で撮像した撮像画像に基づいて検出する。尚、検出された目の位置は3次元の位置座標で特定される。
First, in S<b>31 , the
次に、S32においてCPU41は、HUD4の表示がONになっているか否かを判定する。尚、HUD4の表示のON又はOFFの切り替えは車両の乗員の操作によって行うことが可能である。また、周辺状況や車両の状態に基づいてON又はOFFを自動で切り替えても良い。
Next, in S32, the
そして、HUD4の表示がONになっていると判定された場合(S32:YES)には、S33へと移行する。一方、HUD4の表示がOFFになっていると判定された場合(S32:NO)には、HUD4による警告画像の虚像の表示を行うことなく終了する。
Then, when it is determined that the display of the
S33においてCPU41は、HUD4によって画像を投影する対象となるフロントウィンドウ8の位置座標を取得する。尚、フロントウィンドウ8の位置座標は3次元の位置座標で特定される。
In S<b>33 , the
次に、S34においてCPU41は、前記S10で取得された3次元立体地図において配置された警告画像と対象物仮想体の位置を特定する座標を、警告画像と対象物仮想体の位置座標として夫々取得する。尚、警告画像と対象物仮想体の位置座標は同じく3次元の位置座標で特定される。
Next, in S34, the
続いて、S35においてCPU41は、前記S31、S33及びS34で取得された各位置座標に基づいて、フロントウィンドウ8における警告画像と黒色画像の投影範囲を決定する。更に、決定された投影範囲からHUD4の内部の液晶ディスプレイ6における警告画像と黒色画像の表示範囲についても決定する。尚、警告画像の表示範囲は、前記S9で記憶される形状を有する警告画像が、車両の乗員から3次元立体地図において配置された警告画像と重畳して視認される範囲となる。また、黒色画像の表示範囲は、前記S9で記憶される対象物仮想体の形状を有する黒色画像が、車両の乗員から3次元立体地図において配置された対象物仮想体(即ち実景の警告対象物)と重畳して視認される範囲となる。その後、S12へと移行し、決定された投影範囲や表示範囲に基づいてHUD4を用いた虚像の表示を行う。尚、HUDの表示がオフになるまで繰り返しS9~S12の処理を行うこととなる。
Subsequently, at S35, the
以上詳細に説明した通り、本実施形態に係る重畳画像表示装置1及び重畳画像表示装置1で実行されるコンピュータプログラムによれば、車両の周辺に位置する警告対象物を警告する警告画像61を、車両前方の風景に重畳して視認させる場合に、警告画像61を、警告対象物を囲む立体物で表示する(S7~S12)ので、車両の乗員に対して警告対象物の存在する範囲を3次元的に把握させることが可能となる。その結果、警告対象物に対する警告をより確実に行うことが可能となり、警告対象物を回避する為の運転操作を適切に行わせることができる。
As described in detail above, according to the superimposed
尚、本発明は上記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内で種々の改良、変形が可能であることは勿論である。
例えば、上記本実施形態では、HUD4によって車両2のフロントウィンドウ8の前方に虚像を生成する構成としているが、フロントウィンドウ8以外のウィンドウの前方に虚像を生成する構成としても良い。また、HUD4により映像を反射させる対象はフロントウィンドウ8自身ではなくフロントウィンドウ8の周辺に設置されたバイザー(コンバイナー)であっても良い。
It should be noted that the present invention is not limited to the above-described embodiments, and of course various improvements and modifications are possible without departing from the gist of the present invention.
For example, in the present embodiment described above, the
また、本実施形態では、周辺環境に重畳する画像を表示する手段としてHUD4を用いているが、フロントウィンドウ8に対して画像を表示するウインドウシールドディスプレイ(WSD)を用いても良い。或いはナビゲーション装置3の液晶ディスプレイ17に表示した実景に、警告画像を重畳させる表示装置でもよい。
Further, in this embodiment, the
また、本実施形態では、警告画像を警告対象物の囲む最小の直方体としているが、警告対象物を囲むことが可能であれば他の形状としても良い。例えば、円柱形状としても良いし、球体形状としても良い。また、警告画像については、警告対象物の周囲に対してある程度の余白部分を持たせて囲むようにしても良い。 Also, in the present embodiment, the warning image is the smallest rectangular parallelepiped that surrounds the warning target, but it may be of any other shape as long as it can surround the warning target. For example, it may have a cylindrical shape or a spherical shape. Also, the warning image may be surrounded by a certain amount of blank space around the object to be warned.
また、本実施形態では、走行支援処理プログラム(図3)の処理をナビゲーション装置3のナビゲーションECU15が実行する構成としているが、実行主体は適宜変更することが可能である。例えば、HUD4の制御部、車両制御ECU、その他の車載器が実行する構成としても良い。尚、HUD4の制御部が実行する場合には、本発明に係る重畳画像表示装置はHUD4のみで構成することも可能である。
Further, in the present embodiment, the processing of the driving support processing program (FIG. 3) is configured to be executed by the
また、本発明に係る重畳画像表示装置を具体化した実施例について上記に説明したが、重畳画像表示装置は以下の構成を有することも可能であり、その場合には以下の効果を奏する。 Moreover, although the embodiments embodying the superimposed image display device according to the present invention have been described above, the superimposed image display device can also have the following configuration, and in that case, the following effects can be obtained.
例えば、第1の構成は以下のとおりである。
車両(2)に搭載され、車両の周辺に位置する警告対象物(74)を警告する警告画像(61)を、前記車両前方の風景に重畳して視認させる重畳画像表示装置(1)であって、地図情報に基づいて車両の現在位置周辺に対応する3次元空間を生成する3次元空間生成手段と、3次元空間内における前記警告対象物が存在する位置に、前記警告対象物を模した仮想体を配置する仮想体配置手段と、3次元空間内に前記仮想体を囲む立体物である前記警告画像を配置する画像配置手段と、3次元空間内における車両の位置から前記警告画像と前記仮想体を両者視認した場合の前記警告画像の形状と前記仮想体の形状を夫々取得する形状取得手段と、前記形状取得手段によって取得された形状の前記警告画像とともに、前記形状取得手段によって取得された前記仮想体の形状を示す黒色画像を画像表示面に表示する画像表示手段と、を有し、前記画像表示面に表示された前記警告画像及び前記黒色画像を車両の乗員から視認可能な反射体に反射して車両の乗員に視認させることによって、前記画像表示面に表示された前記警告画像の虚像が前記警告対象物を囲む立体物として前記車両前方の風景に重畳して視認される。
上記構成を有する重畳画像表示装置によれば、警告画像として対象物を囲む立体物を表示することによって、車両の乗員に対して警告対象物の存在する範囲を3次元的に把握させることが可能となる。その結果、警告対象物に対する警告をより確実に行うことが可能となり、警告対象物を回避する為の運転操作を適切に行わせることができる。また、警告画像を虚像として表示する場合において、警告対象物の実像に対応する位置及び範囲に黒色画像を表示することによって、警告対象物と警告画像との前後関係を示す警告画像の虚像を車両の乗員に視認させることが可能となる。
For example, the first configuration is as follows.
A superimposed image display device (1) mounted on a vehicle (2) for superimposing a warning image (61) for warning a warning object (74) positioned around the vehicle on a landscape in front of the vehicle for visual recognition. a three-dimensional space generating means for generating a three-dimensional space corresponding to the vicinity of the current position of the vehicle based on map information; virtual object arrangement means for arranging a virtual object; image arrangement means for arranging the warning image, which is a three-dimensional object surrounding the virtual object, in a three-dimensional space; a shape acquisition unit for acquiring the shape of the warning image and the shape of the virtual object when both virtual objects are visually recognized; and an image display means for displaying a black image representing the shape of the virtual object on an image display surface, the warning image and the black image displayed on the image display surface being reflected so as to be visually recognizable by an occupant of the vehicle. A virtual image of the warning image displayed on the image display surface is superimposed on the scenery in front of the vehicle and visually recognized as a three-dimensional object surrounding the warning object by being reflected by the body and visually recognized by the occupant of the vehicle.
According to the superimposed image display device having the above configuration, by displaying a three-dimensional object surrounding the object as a warning image, it is possible for the vehicle occupant to three-dimensionally grasp the range in which the object to be warned exists. becomes. As a result, it becomes possible to issue a warning to the warning object more reliably, and to appropriately perform the driving operation for avoiding the warning object. In the case of displaying the warning image as a virtual image, by displaying a black image in the position and range corresponding to the real image of the warning object, the virtual image of the warning image showing the anteroposterior relationship between the warning object and the warning image can be displayed on the vehicle. can be visually recognized by the occupant.
また、第2の構成は以下のとおりである。
前記警告画像(61)は、前記警告対象物(74)の全てを囲む最小の直方体で表示される。
上記構成を有する重畳画像表示装置によれば、警告対象物の存在する範囲をシンプルな形状を有する警告画像によって明確に乗員に把握させることが可能となる。
A second configuration is as follows.
The warning image (61) is displayed with the smallest cuboid surrounding all of the warning objects (74).
According to the superimposed image display device having the above configuration, it is possible for the occupant to clearly grasp the range in which the object to be warned exists by means of the warning image having a simple shape.
また、第3の構成は以下のとおりである。
前記警告対象物(61)は、車両が進行路に沿って進行する場合に影響のある動体物である。
上記構成を有する重畳画像表示装置によれば、特に今後に車両の走行に影響のある動体物を対象として、車両の乗員に対して動体物の存在する範囲を3次元的に把握させることが可能となる。
A third configuration is as follows.
The object to be warned (61) is a moving object that has an effect when the vehicle travels along the travel route.
According to the superimposed image display device having the above configuration, it is possible to allow the occupant of the vehicle to three-dimensionally grasp the range in which the moving object exists, especially for the moving object that will affect the running of the vehicle in the future. becomes.
また、第4の構成は以下のとおりである。
前記警告対象物(61)と一部が接続するとともに、前記警告対象物と同一方向に同一速度で移動する付随対象物(76)がある場合には、前記警告対象物は前記警告対象物と前記付随対象物を囲む立体物で表示される。
上記構成を有する重畳画像表示装置によれば、特に警告対象物と付随する対象物がある場合には、該対象物についても含めて警告対象物を囲む立体物を表示することによって、警告対象物の影響する領域を3次元的に把握させることが可能となる。その結果、警告対象物に対する警告をより確実に行うことが可能となり、警告対象物を回避する為の運転操作を適切に行わせることができる。
A fourth configuration is as follows.
When there is an accompanying object (76) partially connected to the warning object (61) and moving in the same direction and at the same speed as the warning object, the warning object is the same as the warning object. A three-dimensional object surrounding the accompanying object is displayed.
According to the superimposed image display device having the above configuration, when there is a warning target and an accompanying target, the warning target is displayed by displaying three-dimensional objects surrounding the warning target including the target. It is possible to three-dimensionally grasp the area affected by . As a result, it becomes possible to issue a warning to the warning object more reliably, and to appropriately perform the driving operation for avoiding the warning object.
また、第5の構成は以下のとおりである。
前記警告対象物(74)が所定範囲内に複数あって、前記複数の警告対象物が同一方向に同一速度で移動する場合には、前記警告画像(61)は前記複数の警告対象物を囲む立体物で表示される。
上記構成を有する重畳画像表示装置によれば、特に警告対象物がまとまってグループ単位で移動する場合には、グループ単位で警告対象物をまとめて囲む立体物を表示することによって、警告画像が重複して表示されることをできる限り防止し、車両の乗員に対して警告対象物の存在する範囲を3次元的に明確に把握させることが可能となる。
Also, the fifth configuration is as follows.
When there are a plurality of warning objects (74) within a predetermined range and the plurality of warning objects move in the same direction at the same speed, the warning image (61) surrounds the plurality of warning objects. displayed in solid form.
According to the superimposed image display device having the above configuration, especially when the warning objects move together in groups, warning images are overlapped by displaying three-dimensional objects surrounding the warning objects collectively in group units. It is possible to prevent the warning object from being displayed as much as possible, and allow the vehicle occupant to clearly grasp the range in which the object to be warned exists three-dimensionally.
また、第6の構成は以下のとおりである。
前記3次元空間生成手段は前記3次元空間として車両の現在位置周辺の3次元地図空間を生成し、前記車両前方の風景を撮像した撮像画像を取得する撮像画像取得手段(41)と、前記撮像画像と3次元地図空間を照合する照合手段(41)と、を有し、前記画像配置手段は、前記照合手段の照合結果に基づいて、3次元地図空間内における前記警告対象物(74)が存在する位置に前記警告画像(61)を配置する。
上記構成を有する重畳画像表示装置によれば、車両前方の風景を撮像した撮像画像と3次元地図情報とを用いることによって、警告対象物を囲む立体物となる警告画像を容易に生成することが可能となる。
Also, the sixth configuration is as follows.
the three-dimensional space generation means generates a three-dimensional map space around the current position of the vehicle as the three-dimensional space, and a captured image acquisition means (41) for acquiring a captured image of the landscape in front of the vehicle ; collation means (41) for collating the captured image and the three-dimensional map space , and the image arrangement means (74) for the warning object in the three-dimensional map space based on the collation result of the collation means. , the warning image (61) is placed at the position where
According to the superimposed image display device having the above configuration, by using the captured image of the landscape in front of the vehicle and the three-dimensional map information, it is possible to easily generate a warning image that is a three-dimensional object surrounding the warning target. It becomes possible.
1 重畳画像表示装置
2 車両
3 ナビゲーション装置
4 HUD
6 液晶ディスプレイ
8 フロントウィンドウ
9 乗員
41 CPU
42 RAM
43 ROM
51 3次元立体地図
61 警告画像
66 黒色画像
67 警告画像の虚像
68 警告対象物
1 superimposed
6
42 RAMs
43 ROMs
51 Three-
Claims (7)
地図情報に基づいて車両の現在位置周辺に対応する3次元空間を生成する3次元空間生成手段と、
3次元空間内における前記警告対象物が存在する位置に、前記警告対象物を模した仮想体を配置する仮想体配置手段と、
3次元空間内に前記仮想体を囲む立体物である前記警告画像を配置する画像配置手段と、
3次元空間内における車両の位置から前記警告画像と前記仮想体を両者視認した場合の前記警告画像の形状と前記仮想体の形状を夫々取得する形状取得手段と、
前記形状取得手段によって取得された形状の前記警告画像とともに、前記形状取得手段によって取得された前記仮想体の形状を示す黒色画像を画像表示面に表示する画像表示手段と、を有し、
前記画像表示面に表示された前記警告画像及び前記黒色画像を車両の乗員から視認可能な反射体に反射して車両の乗員に視認させることによって、前記画像表示面に表示された前記警告画像の虚像が前記警告対象物を囲む立体物として前記車両前方の風景に重畳して視認される重畳画像表示装置。 A superimposed image display device that is mounted on a vehicle and superimposes a warning image that warns of a warning target located around the vehicle on the landscape in front of the vehicle,
a three-dimensional space generating means for generating a three-dimensional space corresponding to the vicinity of the current position of the vehicle based on the map information;
a virtual object arranging means for arranging a virtual object simulating the warning target at a position where the warning target exists in a three-dimensional space;
image arrangement means for arranging the warning image, which is a three-dimensional object surrounding the virtual object, in a three-dimensional space;
shape acquisition means for acquiring the shape of the warning image and the shape of the virtual object when both the warning image and the virtual object are viewed from the position of the vehicle in a three-dimensional space;
an image display means for displaying, on an image display surface, a black image showing the shape of the virtual object obtained by the shape obtaining means together with the warning image of the shape obtained by the shape obtaining means;
The warning image and the black image displayed on the image display surface are reflected by a reflector visible to the vehicle occupant so that the vehicle occupant can visually recognize the warning image displayed on the image display surface. A superimposed image display device in which a virtual image as a three-dimensional object surrounding the warning object is superimposed on the scenery in front of the vehicle and visually recognized .
前記車両前方の風景を撮像した撮像画像を取得する撮像画像取得手段と、
前記撮像画像と3次元地図空間を照合する照合手段と、を有し、
前記画像配置手段は、前記照合手段の照合結果に基づいて、3次元地図空間内における前記警告対象物が存在する位置に前記警告画像を配置する請求項1乃至請求項5のいずれかに記載の重畳画像表示装置。 The three-dimensional space generating means generates a three-dimensional map space around the current position of the vehicle as the three-dimensional space,
a captured image acquiring means for acquiring a captured image of the landscape in front of the vehicle;
a matching means for matching the captured image with the three-dimensional map space ;
6. The warning image according to any one of claims 1 to 5, wherein said image placement means places said warning image at a position where said warning object exists in a three-dimensional map space based on the matching result of said matching means. A superimposed image display device.
地図情報に基づいて車両の現在位置周辺に対応する3次元空間を生成する3次元空間生成手段と、
3次元空間内における前記警告対象物が存在する位置に、前記警告対象物を模した仮想体を配置する仮想体配置手段と、
3次元空間内に前記仮想体を囲む立体物である前記警告画像を配置する画像配置手段と、
3次元空間内における車両の位置から前記警告画像と前記仮想体を両者視認した場合の前記警告画像の形状と前記仮想体の形状を夫々取得する形状取得手段と、
前記形状取得手段によって取得された形状の前記警告画像とともに、前記形状取得手段によって取得された前記仮想体の形状を示す黒色画像を画像表示面に表示する画像表示手段と、として機能させる為のコンピュータプログラムであって、
前記画像表示面に表示された前記警告画像及び前記黒色画像を車両の乗員から視認可能な反射体に反射して車両の乗員に視認させることによって、前記画像表示面に表示された前記警告画像の虚像が前記警告対象物を囲む立体物として前記車両前方の風景に重畳して視認されるコンピュータプログラム。 A superimposed image display device that is mounted on a vehicle and that superimposes a warning image that warns of warning objects located around the vehicle on the landscape in front of the vehicle for visual recognition,
a three-dimensional space generating means for generating a three-dimensional space corresponding to the vicinity of the current position of the vehicle based on the map information;
a virtual object arranging means for arranging a virtual object simulating the warning target at a position where the warning target exists in a three-dimensional space;
image arrangement means for arranging the warning image, which is a three-dimensional object surrounding the virtual object, in a three-dimensional space;
shape acquisition means for acquiring the shape of the warning image and the shape of the virtual object when both the warning image and the virtual object are viewed from the position of the vehicle in a three-dimensional space;
and image display means for displaying, on an image display surface, a black image representing the shape of the virtual object obtained by the shape obtaining means together with the warning image of the shape obtained by the shape obtaining means. a program,
The warning image and the black image displayed on the image display surface are reflected by a reflector visible to the vehicle occupant so that the vehicle occupant can visually recognize the warning image displayed on the image display surface. A computer program in which a virtual image is superimposed on the scenery in front of the vehicle as a three-dimensional object surrounding the warning object and visually recognized .
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017214724 | 2017-11-07 | ||
| JP2017214724 | 2017-11-07 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019087259A JP2019087259A (en) | 2019-06-06 |
| JP7143728B2 true JP7143728B2 (en) | 2022-09-29 |
Family
ID=66763207
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018209923A Active JP7143728B2 (en) | 2017-11-07 | 2018-11-07 | Superimposed image display device and computer program |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7143728B2 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022019117A1 (en) * | 2020-07-21 | 2022-01-27 | ソニーセミコンダクタソリューションズ株式会社 | Information processing device, information processing method, and program |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007156777A (en) | 2005-12-05 | 2007-06-21 | Alpine Electronics Inc | Map display device in navigation system |
| JP2010097335A (en) | 2008-10-15 | 2010-04-30 | Toyota Motor Corp | Driving intention estimating device |
| JP2010160024A (en) | 2009-01-07 | 2010-07-22 | Yupiteru Corp | Target detection apparatus and program |
| JP2011108217A (en) | 2009-11-13 | 2011-06-02 | Shenzhen Futaihong Precision Industrial Co Ltd | Input pen |
| JP2014053022A (en) | 2013-10-03 | 2014-03-20 | Nikon Systems Inc | Image display method, program, image display device, and image pickup device |
| JP2016115276A (en) | 2014-12-17 | 2016-06-23 | トヨタ自動車株式会社 | Warning device |
| JP2017040773A (en) | 2015-08-19 | 2017-02-23 | 株式会社デンソー | Head-mounted display device |
| JP2017135695A (en) | 2016-01-25 | 2017-08-03 | 株式会社Jvcケンウッド | Display device, display method, and program |
| JP2017142760A (en) | 2016-02-12 | 2017-08-17 | 日立オートモティブシステムズ株式会社 | Moving body surrounding environment recognition device |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2544449B1 (en) * | 2010-03-01 | 2016-03-16 | Honda Motor Co., Ltd. | Vehicle perimeter monitoring device |
-
2018
- 2018-11-07 JP JP2018209923A patent/JP7143728B2/en active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007156777A (en) | 2005-12-05 | 2007-06-21 | Alpine Electronics Inc | Map display device in navigation system |
| JP2010097335A (en) | 2008-10-15 | 2010-04-30 | Toyota Motor Corp | Driving intention estimating device |
| JP2010160024A (en) | 2009-01-07 | 2010-07-22 | Yupiteru Corp | Target detection apparatus and program |
| JP2011108217A (en) | 2009-11-13 | 2011-06-02 | Shenzhen Futaihong Precision Industrial Co Ltd | Input pen |
| JP2014053022A (en) | 2013-10-03 | 2014-03-20 | Nikon Systems Inc | Image display method, program, image display device, and image pickup device |
| JP2016115276A (en) | 2014-12-17 | 2016-06-23 | トヨタ自動車株式会社 | Warning device |
| JP2017040773A (en) | 2015-08-19 | 2017-02-23 | 株式会社デンソー | Head-mounted display device |
| JP2017135695A (en) | 2016-01-25 | 2017-08-03 | 株式会社Jvcケンウッド | Display device, display method, and program |
| JP2017142760A (en) | 2016-02-12 | 2017-08-17 | 日立オートモティブシステムズ株式会社 | Moving body surrounding environment recognition device |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019087259A (en) | 2019-06-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2019097763A1 (en) | Superposed-image display device and computer program | |
| JP6700623B2 (en) | Driving support device and computer program | |
| US11511627B2 (en) | Display device and computer program | |
| JP6946963B2 (en) | Superimposed image display device and computer program | |
| JP7151073B2 (en) | Display device and computer program | |
| JP6241093B2 (en) | Head-up display device | |
| EP1961613B1 (en) | Driving support method and driving support device | |
| JP7163748B2 (en) | Vehicle display control device | |
| JP2017094882A (en) | Virtual image generation system, virtual image generation method and computer program | |
| JP7476568B2 (en) | Superimposed image display device, superimposed image drawing method, and computer program | |
| JP6805974B2 (en) | Driving support device and computer program | |
| JP2011117842A (en) | Vehicle travel guide apparatus, vehicle travel guide method, and computer program | |
| JP2019056884A (en) | Superimposed image display device | |
| JP2015074391A (en) | Head-up display device | |
| JP2017062706A (en) | Travel support system, travel support method, and computer program | |
| JP7143728B2 (en) | Superimposed image display device and computer program | |
| JP6984341B2 (en) | Superimposed image display device and computer program | |
| JP7484132B2 (en) | Superimposed image display device and computer program | |
| JP6939147B2 (en) | Driving information guidance device and computer program | |
| JP2019082382A (en) | Superposition picture display device | |
| JP6946962B2 (en) | Driving support device and computer program | |
| JP2020139802A (en) | Superimposed image display device and computer program | |
| JP2021076415A (en) | Superimposed image display apparatus and computer program | |
| JP2023008462A (en) | Superimposed image display device | |
| JP2021081232A (en) | Superimposed image display device and computer program |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20210423 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210825 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220615 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220621 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220729 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220816 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220829 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7143728 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |