JP7128564B2 - 通信ノード、通信システム、通信方法、及びプログラム - Google Patents
通信ノード、通信システム、通信方法、及びプログラム Download PDFInfo
- Publication number
- JP7128564B2 JP7128564B2 JP2022522007A JP2022522007A JP7128564B2 JP 7128564 B2 JP7128564 B2 JP 7128564B2 JP 2022522007 A JP2022522007 A JP 2022522007A JP 2022522007 A JP2022522007 A JP 2022522007A JP 7128564 B2 JP7128564 B2 JP 7128564B2
- Authority
- JP
- Japan
- Prior art keywords
- node
- communication
- child
- stored
- destination
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W40/00—Communication routing or communication path finding
- H04W40/02—Communication route or path selection, e.g. power-based or shortest path routing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W84/00—Network topologies
- H04W84/18—Self-organising networks, e.g. ad-hoc networks or sensor networks
- H04W84/20—Leader-follower arrangements
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W92/00—Interfaces specially adapted for wireless communication networks
- H04W92/16—Interfaces between hierarchically similar devices
- H04W92/18—Interfaces between hierarchically similar devices between terminal devices
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Data Exchanges In Wide-Area Networks (AREA)
- Mobile Radio Communication Systems (AREA)
- Information Transfer Between Computers (AREA)
Description
グラフにおける子ノードとなる通信端末(ノード)2-mの制御部23-mは、エッジに沿って、親ノードとなる通信端末(ノード)2-mにイベントの報告をする。具体的には、コマンドの戻り値の流れで有向グラフを形成する。
グラフは、コマンドの戻り値の流れで有向グラフを形成する。 実装ルール1の目的は、コマンドと戻り値との流れを制限することで、親ノードとなる通信端末(ノード)2-mにグラフの管理権限を持たせることにある。
通信端末(ノード)2-mの制御部23-mによる検索は、直接探索に限定し、2親等以上の探索は、委託に限定し直接探索は行わない。実装ルール2の目的は、探索計算の負荷を分散させるとともに、委託探索の方法を定義し、ネットワークNが不要な探索でリソースを浪費することを回避するために、既知の通信端末(ノード)2-mからの報告を安全に逆上させる方法を持たせることにある。
本実施形態に係るグラフは、オーバーレイをドメインという概念をプロパティとして構成する。グラフでは、通信端末(ノード)2-mのプロパティとして“ドメイン”をアサインする。ここで、ドメインとしてユーザIDを持つ全ての通信端末(ノード)2-mが参加する接続グラフと、経路形成アプリを含む上位レイヤが定義するオーバーレイグラフと、が存在する。したがって、接続グラフという“オーバーレイグラフ”は、 通信システム1をアプリケーションプログラムと見立ててオーバーレイグラフの一種と見ることで、統一したルールでグラフを扱う。
本実施形態に係るグラフは、離散グラフを持つ。実装ルール4の目的は、ユーザIDを有する通信端末(ノード)2-mが存在しないネットワークや、グローバルなインターネットから隔離されたイントラネットに限定して、本実施形態に係る通信システム1を実装する方法を定義する。
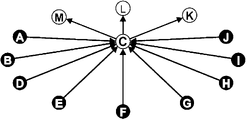
本実施形態に係るグラフの通信端末(ノード)2-mは、他のユーザIDを有する通信端末(ノード)2-mからの起動要求で起動するメソッドまたは関数(コマンド)を持つ。実装ルール1により、起動要求を発信する通信端末(ノード)2-mが起動要求を受ける通信端末(ノード)2-mの親であり、これが管理するグラフ関係を持つユーザIDを有する通信端末(ノード)2-mであることを必要条件として起動させるメソッドまたは関数は、ドメインが一致していることをパブリックメソッド、またはパブリック関数と呼ぶ。この際、ドメインを指定して制限をかけることもできる。ドメインは、外部が1親等の親ノードであることを必要条件として起動させるメソッドまたは関数をプライベートメソッドまたはプライベート関数と呼ぶ。自らを親ノードとする子ノードに対してユニークな委託IDを振ったメソッドまたは関数機能を委託することができる。メソッドまたは関数機能の戻り値は、親ノードに返す。委託を受けた子ノードは、自らを親ノードとする子ノード、すなわち祖ノードから見ると孫ノードに対して通信端末(ノード)2-m間の関係を記述する。ユーザIDを有する通信端末(ノード)2-mに常駐するグラフマネージャは、他の通信端末(ノード)2-mからのコマンド(破線→)を受けて、戻り値を発行する。この戻り値の流れを矢印で記述する。
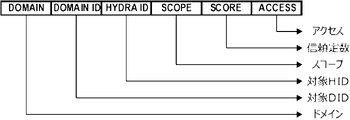
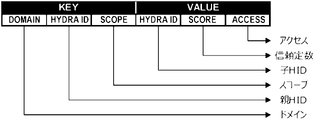
単位グラフは、当該通信端末(ノード)2-mのプロパティとして管理する。以下、ユーザIDを有する通信端末(ノード)2-mの実装例で、当該通信端末(ノード)2-mが管理するプロパティのレコードの内容を箇条書きで掲載する。
)2-mである。
これにより、本実施形態に係る通信システム1は、通信経路の形成の高速化を実現することができる。
[実施例1-1]
[実施例1-2]
[実施例1-3]
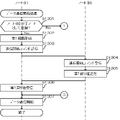
親ノードから子ノードに問い合わせのコマンドを送り、どこかで目的のユーザIDが見つかると、その戻り値が届いた経路を辿って最初に問い合わせたスーパーノード(S)まで戻る。
ループが発生したらその探索経路は切れる。
図20に示すように、共有テーブルに当該ユーザIDを含むグラフを問合せ(query)において「はい(あり)」と判別された場合には、そもそも存在しないユーザIDの可能性もあるから実装上はここで切っている。
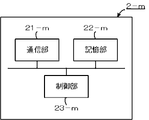
2-m 通信端末(通信ノード)
21-m 通信部
22-m 記憶部
23-m 制御部
24-m ルータ
Claims (8)
- ピア・ツウ・ピア方式で通信を行う通信ノード(2-m)であって、
子ノードに当たる前記通信ノード(2-m)を記憶する記憶部(22-m)と、
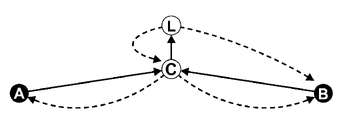
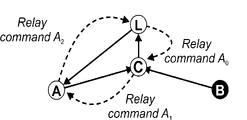
データの発信先となる前記通信ノード(2-m)である発信先ノード(2-2、B)との間の通信経路の形成が指示されたことに応答して、該発信先ノード(2-2、B)が、前記記憶部(22-m)に前記子ノードとして記憶されているか否かを判別し、前記発信先ノード(2-2、B)が子ノードとして記憶されていない場合、前記記憶部(22-m)に子ノードとして記憶されている前記通信ノード(2-1、A)に、前記発信先ノード(2-2、B)との間の通信経路の形成をさらに指示し、前記発信先ノード(2-2、B)が子ノードとして記憶されている場合、該発信先ノード(2-2、B)との間の通信経路を形成する制御部(23-m)と、
を備える通信ノード(2-m)。 - 前記制御部(23-m)は、親ノードに当たる前記通信ノード(2-12、L)から前記通信経路の形成を指示するコマンドを受信した場合において、該通信経路が形成されたときには、該通信経路が形成されたことを示す戻り値を、該親ノードに当たる通信ノード(2-12、L)に送信する、
ことを特徴とする請求項1に記載の通信ノード(2-m)。 - 前記制御部(23-m)は、前記発信先ノード(2-2、B)が子ノードとして記憶されていない場合、前記コマンドを、前記記憶部(22-m)に子ノードとして記憶されている前記通信ノード(2-1、A)に送信し、
前記子ノードとして記憶されている通信ノード(2-1、A)から前記戻り値を受信したことに応答して、該戻り値を前記親ノードに当たる通信ノード(2-12、L)に送信する、
ことを特徴とする請求項2に記載の通信ノード(2-m)。 - ピア・ツウ・ピア方式で通信を行う通信ノード(2-m)を複数具備する通信システム(1)であって、
前記通信ノード(2-m)は、
子ノードに当たる前記通信ノード(2-m)を記憶する記憶部(22-m)と、
データの発信先となる前記通信ノード(2-m)である発信先ノード(2-2、B)との間の通信経路の形成が指示されたことに応答して、該発信先ノード(2-2、B)が、前記記憶部(22-m)に前記子ノードとして記憶されているか否かを判別し、前記発信先ノード(2-2、B)が子ノードとして記憶されていない場合、前記記憶部(22-m)に子ノードとして記憶されている前記通信ノード(2-1、A)に、前記発信先ノード(2-2、B)との間の通信経路の形成をさらに指示し、前記発信先ノード(2-2、B)が子ノードとして記憶されている場合、該発信先ノード(2-2、B)との間の通信経路を形成する制御部(23-m)と、
を備える通信システム(1)。 - 前記制御部(23-m)は、親ノードに当たる前記通信ノード(2-12、L)から前記通信経路の形成を指示するコマンドを受信した場合において、該通信経路が形成されたときには、該通信経路が形成されたことを示す戻り値を、該親ノードに当たる通信ノード(2-12、L)に送信し、
前記親ノードに当たる通信ノード(2-12、L)は、前記データの発信元となる前記通信ノード(2-m)である場合、前記戻り値を受信したことに応答して、前記形成された通信経路を介した前記発信先ノード(2-2、B)との通信を開始する、
ことを特徴とする請求項4に記載の通信システム(1)。 - ピア・ツウ・ピア方式で通信を行う通信ノード(2-m)であって、子ノードに当たる前記通信ノード(2-m)を記憶する記憶部(22-m)と、制御部(23-m)と、を備える通信ノード(2-m)による通信方法であって、
前記制御部(23-m)が、データの発信先となる前記通信ノード(2-m)である発信先ノード(2-2、B)との間の通信経路の形成が指示されたことに応答して、該発信先ノード(2-2、B)が、前記記憶部(22-m)に前記子ノードとして記憶されているか否かを判別し、
前記発信先ノード(2-2、B)が子ノードとして記憶されていない場合、前記記憶部(22-m)に子ノードとして記憶されている前記通信ノード(2-1、A)に、前記発信先ノード(2-2、B)との間の通信経路の形成をさらに指示し、前記発信先ノード(2-2、B)が子ノードとして記憶されている場合、該発信先ノード(2-2、B)との間の通信経路を形成する、
ことを特徴とする通信方法。 - ピア・ツウ・ピア方式で通信を行う通信ノード(2-m)であって、子ノードに当たる前記通信ノード(2-m)を記憶する記憶部(22-m)を備える通信ノード(2-m)を複数具備する通信システム(1)による通信方法であって、
前記通信ノード(2-m)が、データの発信先となる前記通信ノード(2-m)である発信先ノード(2-2、B)との間の通信経路の形成が指示されたことに応答して、該発信先ノード(2-2、B)が、前記記憶部(22-m)に前記子ノードとして記憶されているか否かを判別し、
前記発信先ノード(2-2、B)が子ノードとして記憶されていない場合、前記記憶部(22-m)に子ノードとして記憶されている前記通信ノード(2-1、A)に、前記発信先ノード(2-2、B)との間の通信経路の形成をさらに指示し、前記発信先ノード(2-2、B)が子ノードとして記憶されている場合、該発信先ノード(2-2、B)との間の通信経路を形成する、
ことを特徴とする通信方法。 - ピア・ツウ・ピア方式で通信を行う通信ノード(2-m)であって、子ノードに当たる前記通信ノード(2-m)を記憶する記憶部(22-m)を備える通信ノード(2-m)のコンピュータに、
データの発信先となる前記通信ノード(2-m)である発信先ノード(2-2、B)との間の通信経路の形成が指示されたことに応答して、該発信先ノード(2-2、B)が、前記記憶部(22-m)に前記子ノードとして記憶されているか否かを判別する手順と、
前記発信先ノード(2-2、B)が子ノードとして記憶されていない場合、前記記憶部(22-m)に子ノードとして記憶されている前記通信ノード(2-1、A)に、前記発信先ノード(2-2、B)との間の通信経路の形成をさらに指示し、前記発信先ノード(2-2、B)が子ノードとして記憶されている場合、該発信先ノード(2-2、B)との間の通信経路を形成する手順と、
を実行させるためのプログラム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020140500 | 2020-08-21 | ||
| JP2020140500 | 2020-08-21 | ||
| PCT/JP2021/030696 WO2022039278A1 (ja) | 2020-08-21 | 2021-08-21 | 通信ノード、通信システム、通信方法、及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2022039278A1 JPWO2022039278A1 (ja) | 2022-02-24 |
| JP7128564B2 true JP7128564B2 (ja) | 2022-08-31 |
Family
ID=80323032
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022522007A Active JP7128564B2 (ja) | 2020-08-21 | 2021-08-21 | 通信ノード、通信システム、通信方法、及びプログラム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7128564B2 (ja) |
| WO (1) | WO2022039278A1 (ja) |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012217164A (ja) | 2011-03-31 | 2012-11-08 | Mitsubishi Electric Research Laboratories Inc | マルチホップネットワークにおいて複数の経路を発見する方法および複数の経路を検索するノード |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050036486A1 (en) * | 2003-08-12 | 2005-02-17 | Zafer Sahinoglu | Route discovery in ad-hoc networks with data packets |
-
2021
- 2021-08-21 JP JP2022522007A patent/JP7128564B2/ja active Active
- 2021-08-21 WO PCT/JP2021/030696 patent/WO2022039278A1/ja not_active Ceased
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012217164A (ja) | 2011-03-31 | 2012-11-08 | Mitsubishi Electric Research Laboratories Inc | マルチホップネットワークにおいて複数の経路を発見する方法および複数の経路を検索するノード |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2022039278A1 (ja) | 2022-02-24 |
| JPWO2022039278A1 (ja) | 2022-02-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110326255B (zh) | 管理消息传递协议通信 | |
| TWI221979B (en) | Secured and access controlled peer-to-peer resource sharing method and apparatus | |
| Korzun et al. | Deployment of Smart Spaces in Internet of Things: Overview of the design challenges | |
| Gong | Project JXTA: A technology overview | |
| CN106209741B (zh) | 一种虚拟主机及隔离方法、资源访问请求处理方法及装置 | |
| EP2774077B1 (en) | Method and apparatus for providing identity based encryption in distributed computations | |
| WO2013098472A1 (en) | Method and apparatus for providing social network services based on connectivity information | |
| US20220277107A1 (en) | Confidential computing workflows | |
| Al-Bahri et al. | Integrating internet of things with the digital object architecture | |
| Buthpitiya et al. | Hermes--A context-aware application development framework and toolkit for the mobile environment | |
| WO2016141783A1 (zh) | 访问控制、策略获取、属性获取方法及相关装置 | |
| CN117176415A (zh) | 集群访问方法、装置、电子设备及存储介质 | |
| CN106155566A (zh) | 用于存储数据的方法、装置及系统 | |
| JP7128564B2 (ja) | 通信ノード、通信システム、通信方法、及びプログラム | |
| CN121333777A (zh) | 多协议整合方法、装置、设备、存储介质和程序产品 | |
| CN113259464B (zh) | 组建区块链子网的方法和区块链系统 | |
| Mosch et al. | User-controlled resource management in federated clouds | |
| WO2018214792A1 (zh) | 一种用于对用户设备进行流量控制的方法与设备 | |
| CN107111635B (zh) | 内容传递方法 | |
| Ali et al. | The quest for fully smart autonomous business networks in IoT platforms | |
| de Almeida Amazonas | Opportunities, challenges for internet of things technologies | |
| Hilia et al. | Semantic based authorization framework for multi-domain collaborative cloud environments | |
| Pandey et al. | Aglets (A java based Mobile agent) and its security issue | |
| CN111404936B (zh) | 文件转发系统及方法 | |
| Sawant et al. | Securing IoT Using MultiChain |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220411 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20220411 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220524 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220809 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220812 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7128564 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |