JP7127052B2 - 大気粒子状物質を監視するためのシステムおよび方法 - Google Patents
大気粒子状物質を監視するためのシステムおよび方法 Download PDFInfo
- Publication number
- JP7127052B2 JP7127052B2 JP2019554492A JP2019554492A JP7127052B2 JP 7127052 B2 JP7127052 B2 JP 7127052B2 JP 2019554492 A JP2019554492 A JP 2019554492A JP 2019554492 A JP2019554492 A JP 2019554492A JP 7127052 B2 JP7127052 B2 JP 7127052B2
- Authority
- JP
- Japan
- Prior art keywords
- particles
- substrate
- trapped
- sensor
- air
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N15/02—Investigating particle size or size distribution
- G01N15/0205—Investigating particle size or size distribution by optical means
- G01N15/0227—Investigating particle size or size distribution by optical means using imaging; using holography
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N1/00—Sampling; Preparing specimens for investigation
- G01N1/02—Devices for withdrawing samples
- G01N1/22—Devices for withdrawing samples in the gaseous state
- G01N1/2202—Devices for withdrawing samples in the gaseous state involving separation of sample components during sampling
- G01N1/2205—Devices for withdrawing samples in the gaseous state involving separation of sample components during sampling with filters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N1/00—Sampling; Preparing specimens for investigation
- G01N1/02—Devices for withdrawing samples
- G01N1/22—Devices for withdrawing samples in the gaseous state
- G01N1/2273—Atmospheric sampling
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N1/00—Sampling; Preparing specimens for investigation
- G01N1/28—Preparing specimens for investigation including physical details of (bio-)chemical methods covered elsewhere, e.g. G01N33/50, C12Q
- G01N1/2813—Producing thin layers of samples on a substrate, e.g. smearing, spinning-on
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N15/02—Investigating particle size or size distribution
- G01N15/0205—Investigating particle size or size distribution by optical means
- G01N15/0211—Investigating a scatter or diffraction pattern
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N15/06—Investigating concentration of particle suspensions
- G01N15/0606—Investigating concentration of particle suspensions by collecting particles on a support
- G01N15/0618—Investigating concentration of particle suspensions by collecting particles on a support of the filter type
- G01N15/0625—Optical scan of the deposits
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N15/06—Investigating concentration of particle suspensions
- G01N15/0606—Investigating concentration of particle suspensions by collecting particles on a support
- G01N15/0637—Moving support
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N15/06—Investigating concentration of particle suspensions
- G01N15/0656—Investigating concentration of particle suspensions using electric, e.g. electrostatic methods or magnetic methods
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N15/10—Investigating individual particles
- G01N15/14—Optical investigation techniques, e.g. flow cytometry
- G01N15/1429—Signal processing
- G01N15/1433—Signal processing using image recognition
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/94—Investigating contamination, e.g. dust
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N1/00—Sampling; Preparing specimens for investigation
- G01N1/28—Preparing specimens for investigation including physical details of (bio-)chemical methods covered elsewhere, e.g. G01N33/50, C12Q
- G01N1/2813—Producing thin layers of samples on a substrate, e.g. smearing, spinning-on
- G01N2001/2833—Collecting samples on a sticky, tacky, adhesive surface
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N2015/0042—Investigating dispersion of solids
- G01N2015/0046—Investigating dispersion of solids in gas, e.g. smoke
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N15/02—Investigating particle size or size distribution
- G01N2015/0294—Particle shape
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N2015/03—Electro-optical investigation of a plurality of particles, the analyser being characterised by the optical arrangement
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N15/10—Investigating individual particles
- G01N2015/1029—Particle size
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N15/10—Investigating individual particles
- G01N2015/103—Particle shape
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N15/10—Investigating individual particles
- G01N15/14—Optical investigation techniques, e.g. flow cytometry
- G01N2015/1493—Particle size
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N15/10—Investigating individual particles
- G01N15/14—Optical investigation techniques, e.g. flow cytometry
- G01N2015/1497—Particle shape
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/85—Investigating moving fluids or granular solids
- G01N2021/8578—Gaseous flow
- G01N2021/8585—Gaseous flow using porous sheets, e.g. for separating aerosols
Landscapes
- Chemical & Material Sciences (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biochemistry (AREA)
- General Physics & Mathematics (AREA)
- Pathology (AREA)
- Immunology (AREA)
- Analytical Chemistry (AREA)
- Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Dispersion Chemistry (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Molecular Biology (AREA)
- Signal Processing (AREA)
- Investigating Or Analysing Materials By Optical Means (AREA)
- Sampling And Sample Adjustment (AREA)
- Computer Vision & Pattern Recognition (AREA)
Description
本出願は、「Low-Cost Air Particulate Monitor Based On Particle Capture And Imaging」のタイトルで、2016年12月19日に出願された米国仮特許出願第62/436,030号の優先権および利益を主張し、この内容は、参照により全体として本明細書に組み込まれる。
本出願は、大気粒子状物質を監視するための、さらに具体的には、粒子を捕捉し、捕捉された粒子を読み取り(reading)、捕捉された粒子から収集した情報に基づいて解析を実行するための、システムおよび方法に関する。
環境衛生は、ますます重要になっている世界的問題のままである。例えば、大気汚染は、例えば、地球の放射収支、雲の形成、地球温暖化および視程に影響を及ぼす環境効果を有することが知られている。大気汚染のこれらの環境影響は、特に目、鼻、のど、肺、心臓、および妊娠結果に関する、人間の健康にも影響を及ぼす。大気汚染の悪影響を緩和するため、多くの国が、汚染物質を規制するために法律を制定している。その結果、さまざまな存在が、大気汚染を監視し、必要に応じて措置を講じることを義務付けられるか、またはそのように動機付けされてきた。この目的で、例えば、製造業者、建設業者、および都市などの存在が、より清潔で地球にやさしい環境を達成することを目的として、より環境にやさしい機械類、車、飛行機、建物、工場、インフラストラクチャーなどをますます開発または利用してきた。
例えば空気中の、粒子状物質(PM)を監視するためのシステムおよび方法が、本明細書に記載される。より具体的には、空気から粒子を捕捉し、捕捉されている間に、粒子に対して感知動作を実行する、PM監視システムおよび方法が本明細書に記載される。粒子は、電気集塵および機械的捕獲器(mechanical captors)、ツールおよび/または技術のうちの1つ、またはその組み合わせを用いて、捕捉され得る。本明細書に記載するように、電気集塵は、(1)導電性基板を1つの電荷で帯電させること、および(2)基板の電荷と反対の別の電荷で、収集された空気中の粒子を帯電させること、によって達成され得る。粒子は、電極によって帯電されて電荷担体を生成し、粒子を帯電させて逆荷電基板の方向にそらすことができ、粒子は分析のために付着したままとすることができる。機械的ツールおよび技術が、同様に、またはさらに使用されて、粒子を捕捉することができる。例えば、基板として機能するフィルターまたは繊維群で構成される、ろ過システム。フィルターおよび/または繊維は、空気がその中を流れるときに粒子を横取りするように構成される。空気の流れおよび粒子が収集される空気の体積は、空気ポンプまたは同様のシステムを用いて、制御され得る。
特定の例示的な実施形態を説明して、本明細書に開示するシステムおよび方法の構造、機能、製造、および使用の原理の全体的な理解を提供する。これらの実施形態の1つ以上の実施例が、添付図面に示されている。当業者は、本明細書に具体的に記載し、添付図面に例示するシステムおよび方法が、非限定的な例示的な実施形態であること、また、本開示の範囲が、特許請求の範囲によってのみ定められることを、理解するであろう。例示的な一実施形態に関連して例示または記載される特徴は、他の実施形態の特徴と組み合わせることができる。このような改変および変形は、本開示の範囲内に含まれることが意図されている。本開示では、さまざまな実施形態の同様の符号の構成要素は一般的に、それらの構成要素が同様の性質のものであり、かつ/または同様の目的に役立つ場合、同様の特徴を有する。当業者は、本開示を考慮すれば、さまざまな図面にわたる同様の符号の構成要素が類似しているさまざまな場合を理解するであろう。さらに、いくつかの場合、当業者に理解されるか、別様に既知であり、かつ/または本開示で提供される、さまざまな用語は、互換的に使用されている。非限定的な実施例として、捕捉するおよび収集する、デバイスおよびシステム、光および照明などの用語は、本明細書では互換的に使用され得る。
図1は、例えば本明細書に記載するような粒子状物質(PM)センサを用いて、大気粒子状物質を監視するためのエコシステム100の例示的な実施形態を示す。エコシステム100は、さまざまなシステム、センサ、物体、ネットワーク、インフラストラクチャーなどを含み、これらは、いくつかの実施形態では、大気粒子状物質データを収集および監視し、監視に基づいてアクション、イベント、機能などをトリガーするのに使用され得る。大気粒子状物質監視エコシステム100は、任意の数およびタイプの相互接続されたシステム、センサ、物体、ネットワーク、インフラストラクチャーなどを含み得、そのうち、図1に示すものは、例示的な実施例として役立つことを、理解されたい。例えば、エコシステム100は、モノのインターネット(IoT)、公共もしくは私的ネットワーク、または相互接続されたデバイスの任意の同様のセットを指すことができる。示された例示的な粒子状物質監視エコシステム100では、データが、本明細書に記載するものおよび当業者に既知の他のものなどの基準またはプロトコルを用いて、有線または無線通信を介して、伝送され得ることも、理解されたい。
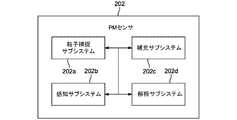
前述したとおり、大気粒子状物質(PM)センサ(「PMセンサ」とも呼ぶ)、例えばPMセンサ101d-1は、とりわけ、粒子を捕捉し、捕捉された粒子を識別し、捕捉された粒子から収集した情報に基づいて解析を実行することによって、大気PM物質を監視するために環境に配備され得る。図2は、図2では素子「202」と標識され、以下では互換的に「202」または「PMセンサ202」と呼ぶ、図1のPMセンサ101d-1のシステム構造図を示す。図2に示すように、いくつかの実施形態では、PMセンサ202は、粒子を基板上に捕捉するための粒子捕捉サブシステム202aと、捕捉された粒子に対して感知動作を実行するための感知サブシステム202bと、粒子が捕捉された基板をクリーニングまたは補充するための補充サブシステム202cと、捕捉された粒子の感知に基づいて解析動作を実行するための解析サブシステム202dと、を含み得る。これらのサブシステムの機能性の概要は、例示的な実施形態によるPMセンサ202の動作原理を示す、少なくとも図3に関連してこれから説明する。
図5は、大気粒子状物質(PM)を監視するための例示的な1つのプロセス400を示すアクティビティ図である。プロセス400では、大気粒子状物質の監視は、図2のPMセンサ202などのPMセンサ、およびそのサブシステムを用いて実行され得る。PMセンサのサブシステムは、図5の監視プロセスに関連して以下で説明する。
図5に示すように、監視プロセスは、ステップ450で始めることができ、ステップ450では、空気が環境から収集され、空気からの粒子は、PMセンサ202の粒子捕捉サブシステム202aによって捕捉される。さまざまな技術を使用して、空気をPMセンサ202内へ、および/または基板に向かって駆動し、収集された空気から粒子を捕捉することができる。このような技術は、機械的圧縮、吸引もしくは放散ベースの捕捉、静電捕捉、音響および/もしくは誘電泳動力(dieletrophoretic forces)を用いた捕捉、空気を含む流体中で粒子を操作する手段、および当業者に既知の他のもののうちの1つ、または組み合わせを含み得る。いくつかの実施形態では、粒子の捕捉は、空気からの粒子を基板に向かって、また基盤へとそらすことを含む。いくつかの実施形態では、粒子の捕捉は、捕捉された粒子が基板と接触しているか、または基板と接触している別の粒子もしくは物体と接触していることを含む。いくつかの実施形態では、粒子の捕捉は、粒子が基板と接触しているか、または実質的に近接している間に、粒子の位置を制御することを含む。粒子の捕捉は、いくつかの実施形態では、所望の感知動作を粒子に対して実行するのに十分長い時間にわたって行われる。いくつかの実施形態では、粒子は、十分な付着または捕捉力で、基板と接触しているか、または実質的に近接している場合に、捕捉されたとみなされ、粒子は、一定の空気もしくは空気流条件下では、または逆もしくは切り離しアクションもしくは力が加えられなければ、基板から分離せず、また、捕捉されなくはならない。
前述したとおり、感知サブシステム202bは、ステップ450で捕捉された粒子に関する情報を測定および/または検出するように構成された、1つ以上のハードウェアおよび/またはソフトウェア構成要素で構成される。例えば、感知サブシステムは、センサ、または同じかもしくは異なる感知能力を有するセンサもしくはセンサ素子のアレイを含み得る。感知サブシステム202bのセンサ、またはセンサのアレイによって提供され得る感知の種類の非限定的で例示的な例は、光学感知、音響感知、電磁感知、誘電感知、および当業者に既知の他の感知を含み得る。感知サブシステム202bに含まれるか、またはこれを形成するセンサおよび他の構成要素の数および種類は、PMセンサ202の種類および目的によって取得しようとする粒子に関する情報の種類に左右され得る。感知サブシステム202bのセンサの非限定的な例は、容量センサ、磁気センサ、超伝導量子干渉素子(SQUID)センサ、圧電センサなどを含み得る。いくつかの実施形態では、複数の感知方式が、捕捉された粒子に関する追加情報を得るために感知サブシステム202bによって使用され得る。さらに、センサは、感知素子のアレイを含み得、捕捉された粒子は、1つ以上の感知素子によって感知され得る。感知素子は、基板上で捕捉された種々の粒子に対して別様に機能し得る。よって、カメラによる撮像では、種々の粒子により散乱した光は、カメラの種々の群の感知素子(例えばピクセル)に衝突し得る。
補充の判断および実行は、ステップ464および466で、補充サブシステム202cによって実行され得る。本明細書で使用される用語「補充」は、基板もしくは基板表面をクリーニングすること、または基板を取り換えるか、もしくは交換することを含む。前述したとおり、いくつかの実施形態では、基板は、導電性表面、例えば、銅プレート、フィルター、または導電性もしくは非導電性テープであってよい。いくつかの実施形態では、基板表面は、粒子が捕捉される基板の表面を指すことができる。補充は、基板もしくは基板表面の有用性の期間を延ばすこと、または捕捉され、したがって撮像され得る粒子を変更もしくはリセットすること、を含む、さまざまな理由で、実行され得る。よって、ステップ464では、例えばPM監視プロセスのデータを、予め判断されるか、もしくは動的に計算された閾値と比較することによって、補充が必要とされるか、もしくは所望されるかどうかに関して、判断を行い得る。例えば、ステップ464は、最後の補充以来、所与の粒子捕捉時間に到達したかどうか、または、最後の補充以来、所与の量の粒子状物質が基板もしくは表面上に捕捉されているかどうか、を判断することを含み得る。これらの補充に関連する判断は、図5に示されるプロセス400の任意のステップ中に、また当業者に既知のさまざまなデータのうちのいずれかに基づいて、動的に実行され得る。例えば、閾値が、捕捉された粒子状物質のタイミングもしくは量などの要因に基づいて、必要とされるか、または要望されると判断された場合であっても、補充サブシステムは、PMセンサ202のバッテリが低く、したがって、補充プロセスを延期またはキャンセルしてその有用性の期間を伸ばすことを判断し得る。
前述したとおり、解析サブシステム202dは、PMセンサ202に埋め込まれ、かつ/または1つ以上の通信可能に連結されたシステム、例えばクラウド105および管理システム107に設けられた、ハードウェアおよびソフトウェアで構成され得る。例えば、ハードウェアは、1つ以上のメモリに記憶され得る、ソフトウェア、ロジック、アルゴリズム、指示などを実行するように構成またはプログラムされた、1つ以上のプロセッサを含み得る。いくつかの実施形態では、ハードウェアおよびソフトウェアは、ソフトウェアを実行するプロセッサが、PMセンサ202(および/もしくは解析サブシステム202d)上に、またはこれによって、設けられ、ソフトウェアが遠隔に(例えば、クラウド105に)記憶され、PMセンサにアクセス可能とされるように、分布され得る。いくつかの実施形態では、PMセンサ202は、解析サブシステム202dとして機能するモバイルデバイスなどのデバイスに有線接続されるか、または無線で連結され得る。解析サブシステム202dのモバイルデバイスまたは他の構成は、捕捉され感知された(例えば撮像された)粒子の解析を管理するのに使用され得る。当業者に既知であるように、解析の管理は、入力出力(inputs outputs)を介して実行され得、これは、例えば、ある解析プロセスが実行されること、および/または、ある解析データが出力されることを指示するのに使用され得る。
いくつかの実施形態では、PMセンサまたはシステムは、粒子捕捉サブシステム、感知サブシステム、および補充システムを含む。粒子捕捉サブシステムは、粒子を空気から基板上に捕捉するように構成される。粒子捕捉サブシステムは、電気集塵(ESP)ベースおよび/またはろ過ベースであってよく、これは、電気集塵および/またはろ過システムがそれぞれ、空気から粒子を捕捉するのに使用されることを意味する。いくつかの実施形態では、PMセンサは、およそPM10およびPM2.5の粒子状物質の数を、約200nmまでの粒子サイズの感度および約1~500ug/m3のダイナミックレンジで、測定するように構成される。すなわち、PMセンサは、約2.5μm~25μmの粒子を感知するように構成され得る。いくつかの実施形態では、PMセンサは、小型であってよく、例えば、約2cm×2cm未満である。いくつかの実施形態では、PMセンサは、1日当たり約24回の読取を行うために、約1000mAh未満のバッテリを消費するように構成される。一方、需要が高い場合には、1000mAhのバッテリで、PMセンサは、1日当たり約300回の読取を、約6か月間実行することができる。
図14は、PMセンサ(例えば202)を含み、かつ/または本明細書に記載されるPM監視プロセス(例えば図5)を実行し得る、コントローラ、またはコンピュータ800の例示的な実施形態の物理的構成要素のブロック図を示す。例示的なコンピュータ800が本明細書に描かれ説明されているが、これは、普遍性および便宜のためであることが、認識されるであろう。他の実施形態では、コンピュータ800は、構造および動作が、本明細書に図示され説明されたものとは異なっていてよい。コンピュータ800は、タブレット型コンピュータ、モバイルデバイス、スマートデバイス、ウェアラブルデバイス、スマートフォン、ラップトップコンピュータ、デスクトップコンピュータ、クラウドベースのコンピュータ、サーバーコンピュータ、複数の前述したものなどであってよい。
(1) 粒子状物質を監視する方法において、
1つ以上の基板上で流れる空気から粒子を捕捉することであって、前記捕捉することは、静電および機械的捕獲器のうちの1つ以上を用いて実行される、ことと、
捕捉された前記粒子に対して、1つ以上の感知動作を実行することと、
前記1つ以上の感知動作の結果に基づいて、前記捕捉された粒子を分析することと、
を含み、
前記粒子が前記基板上で捕捉されると、前記粒子は、前記1つ以上の感知動作を前記粒子に対して実行するのに十分長い期間にわたって維持され得る前記基板に対する制御位置にくる、方法。
(2) 実施態様1に記載の方法において、
前記1つ以上の基板は導電性であり、
前記粒子を前記1つ以上の基板上に捕捉するために、前記方法は、
前記1つ以上の基板のうちの少なくとも1つを第1の電荷で帯電させることと、
前記粒子を、前記第1の電荷の反対である第2の電荷で帯電させることと、をさらに含み、
前記粒子を前記第2の電荷で帯電させることにより、前記粒子が、前記1つ以上の基板に向かって、またその上へとそれる、方法。
(3) 実施態様1に記載の方法において、
前記1つ以上の基板は、フィルターを含み、
前記粒子を前記1つ以上の基板上に捕捉するために、前記方法は、
前記空気が、前記1つ以上の基板の前記フィルターを通って、またはこの上を流れることを可能にし、それによって、前記空気中の前記粒子を、前記フィルターのうちの1つ以上によって捕捉させることをさらに含む、方法。
(4) 実施態様1、2、または3に記載の方法において、
前記1つ以上の基板は、可動のテープの1つ以上の部分によって形成され、前記可動のテープは、前記1つ以上の基板上での前記粒子の捕捉と同時に粒子が捕捉されていない、他の部分を含む、方法。
(5) 実施態様2または3に記載の方法において、
前記粒子を前記1つ以上の基板上に捕捉するために、前記方法は、空気ポンプを用いて前記1つ以上の基板に向かう前記空気の流れを促進することをさらに含む、方法。
前記1つ以上の基板は、前記基板の本体から離れた方を向く、改質表面を含み、
前記粒子は、前記1つ以上の基板の前記改質表面に付着することによって前記1つ以上の基板上に捕捉される、方法。
(7) 実施態様4に記載の方法において、
前記粒子の捕捉が前記可動のテープの別の部分で実行されるように前記可動のテープを前進させることによって、前記粒子が捕捉される前記1つ以上の基板の少なくとも一部を補充することをさらに含む、方法。
(8) 実施態様2、3、または7に記載の方法において、
前記粒子が捕捉される前記1つ以上の基板の少なくとも1つの表面をクリーニングすることをさらに含む、方法。
(9) 実施態様8に記載の方法において、
前記少なくとも1つの表面のクリーニングは、機械的手段および静電手段のうちの1つ以上を用いて実行される、方法。
(10) 実施態様9に記載の方法において、
前記少なくとも1つの表面を、静電手段を用いてクリーニングするため、前記方法は、
前記捕捉された粒子を、前記第1の電荷に等しい第3の電荷で帯電させるようにさらに機能し、
前記捕捉された粒子を、前記第3の電荷で帯電させることにより、前記粒子は、前記1つ以上の基板から離れて分離する、方法。
前記1つ以上の感知動作は、光学感知、音響感知、電磁感知、および誘電感知のうちの1つ以上を実行するように構成された1つ以上のセンサによって実行される、方法。
(12) 実施態様11に記載の方法において、
前記1つ以上のセンサは、最適な感知を実行するように構成され、
前記1つ以上のセンサは、カメラを含む、方法。
(13) 実施態様12に記載の方法において、
前記1つ以上の感知動作は光学感知を含み、
前記1つ以上の感知動作の前記光学感知を行うため、前記方法は、
前記1つ以上の基板を照らすことと、
前記1つ以上の基板上に捕捉された前記粒子によって散乱する散乱光を検出することと、
をさらに含む、方法。
(14) 実施態様13に記載の方法において、
前記照らすことは、視射角で前記1つ以上の基板に向けられた光を用いて実行される、方法。
(15) 実施態様14に記載の方法において、
前記捕捉された粒子によって散乱する前記散乱光に少なくとも部分的に基づいて、前記1つ以上の基板上に捕捉される前記粒子を撮像することをさらに含む、方法。
前記1つ以上の感知動作の結果は、前記1つ以上の基板上に捕捉された前記粒子の1つ以上の画像を含み、
前記捕捉された粒子を分析することは、
前記捕捉された粒子の前記画像から前記粒子に対応する粒子データを識別することを含む、方法。
(17) 実施態様16に記載の方法において、
前記捕捉された粒子を分析することは、
汚染または粒子状物質情報を、前記粒子データに基づいて計算することをさらに含む、方法。
(18) 実施態様1に記載の方法において、
前記粒子を捕捉するステップ、前記1つ以上の感知動作を行うステップ、および前記捕捉された粒子を分析するステップのうちの1つ以上の態様を動的に調節することをさらに含む、方法。
(19) 実施態様1に記載の方法において、
前記動的に調節することは、
(1)前記粒子が捕捉される前記空気の体積を調節することと、
(2)前記粒子の捕捉、前記1つ以上の感知動作の実行、または前記捕捉された粒子の分析を実行するタイミングを調節することと、
(3)前記1つ以上の基板またはその表面を補充またはクリーニングすることと、
のうちの少なくとも1つを含む、方法。
(20) 粒子状物質を監視するためのシステムにおいて、
静電および機械的捕獲器のうちの1つ以上を用いて流れる空気から粒子を捕捉するように動作可能な基板と、
捕捉された前記粒子に対して1つ以上の感知動作を実行するように動作可能なセンサと、
前記センサに、前記捕捉された粒子に対して前記1つ以上の感知動作を実行させるように動作可能な少なくとも1つのプロセッサと、
を含み、
前記基板、前記センサ、および前記少なくとも1つのプロセッサは、通信可能に連結され、
前記粒子が前記基板上に捕捉されると、前記粒子は、前記1つ以上の感知動作を前記粒子に対して実行するのに十分長い期間にわたって維持され得る前記基板に対する制御位置にくる、システム。
前記基板は、導電性材料を含み、
前記粒子を前記基板上に捕捉するために、前記少なくとも1つのプロセッサは、
前記基板を第1の電荷で帯電させ、
前記空気中の前記粒子を、前記第1の電荷の反対である第2の電荷で帯電させる、
ように動作可能であり、
前記粒子を前記第2の電荷で帯電させることにより、前記粒子が、前記基板に向かって、またその上へとそれる、システム。
(22) 実施態様20に記載のシステムにおいて、
前記基板は、フィルターを含み、
前記粒子を前記基板上に捕捉するために、前記少なくとも1つのプロセッサは、
前記空気が、前記基板の前記フィルターを通って、またはこの上を流れることを可能にし、それによって、前記空気中の前記粒子を、前記フィルターのうちの1つ以上によって捕捉させるように動作可能である、システム。
(23) 実施態様20、21、または22に記載のシステムにおいて、
前記基板は、可動のテープの1つ以上の部分によって形成され、前記可動のテープは、前記1つ以上の基板上での前記粒子の捕捉と同時に粒子が捕捉されていない、他の部分を含む、システム。
(24) 実施態様21または22に記載のシステムにおいて、
空気の流れを増減させるように動作可能な空気ポンプをさらに含み、
前記粒子を前記基板上に捕捉するために、前記1つ以上のプロセッサは、
前記空気ポンプに、前記基板に向かう、前記粒子を含有する空気の流れを増減させるように動作可能である、システム。
(25) 実施態様21または22に記載のシステムにおいて、
前記基板は、前記基板の本体から離れた方を向く、改質表面を含み、
前記粒子は、前記基板の前記改質表面に付着することによって前記基板上に捕捉される、システム。
前記少なくとも1つのプロセッサは、
前記粒子の捕捉が前記可動のテープの別の部分で実行されるように、前記可動のテープを前進させることによって、前記粒子が捕捉される前記テープの少なくとも一部を補充させるように、さらに動作可能である、システム。
(27) 実施態様21、22、または26に記載のシステムにおいて、
前記少なくとも1つのプロセッサは、
前記粒子が捕捉される前記基板の少なくとも1つの表面をクリーニングさせるように、さらに動作可能である、システム。
(28) 実施態様27に記載のシステムにおいて、
前記基板の前記少なくとも1つの表面のクリーニングは、機械的手段および静電手段のうちの1つ以上を用いて実行される、システム。
(29) 実施態様28に記載のシステムにおいて、
前記基板の前記少なくとも1つの表面を、静電手段を用いてクリーニングするため、前記少なくとも1つのプロセッサは、
前記捕捉された粒子を、前記第1の電荷に等しい第3の電荷で帯電させるようにさらに動作可能であり、
前記捕捉された粒子を、前記第3の電荷で帯電させることにより、前記粒子は、前記基板から離れて分離する、システム。
(30) 実施態様29に記載のシステムにおいて、
前記センサは、光学感知、音響感知、電磁感知、および誘電感知のうちの1つ以上を実行するように動作可能である、システム。
前記センサは、最適な感知をを用いて、前記1つ以上の感知動作を実行するように構成され、
前記センサは、カメラを含む、システム。
(32) 実施態様31に記載のシステムにおいて、
照明光源をさらに含み、
前記1つ以上の感知動作のうちの前記最適な感知を実行するために、
(1)前記少なくとも1つのプロセッサは、前記照明光源に前記基板を照らさせるように動作可能であり、
(2)前記センサは、前記基板上に捕捉された前記粒子によって散乱する散乱光を検出する、システム。
(33) 実施態様32に記載のシステムにおいて、
前記基板を照らすために、前記照明光源は、視射角で前記基板に光を向ける、システム。
(34) 実施態様33に記載のシステムにおいて、
前記センサは、前記捕捉された粒子によって散乱する前記散乱光に少なくとも部分的に基づいて、前記捕捉された粒子を撮像するようにさらに動作可能である、システム。
(35) 実施態様29に記載のシステムにおいて、
前記1つ以上のプロセッサは、前記1つ以上の感知動作の結果に基づいて、前記捕捉された粒子を分析するようにさらに動作可能である、システム。
前記1つ以上の感知動作の結果は、前記基板上に捕捉された前記粒子の1つ以上の画像を含み、
前記捕捉された粒子を分析するために、前記1つ以上のプロセッサは、前記捕捉された粒子の前記画像から前記粒子に対応する粒子データを識別するように動作可能である、システム。
(37) 実施態様36に記載のシステムにおいて、
前記捕捉された粒子を分析することは、汚染または粒子状物質情報を、前記粒子データに基づいて計算することを含む、システム。
(38) 実施態様37に記載のシステムにおいて、
前記1つ以上のプロセッサは、前記システムまたはその動作の態様を動的に調節するように動作可能である、システム。
(39) 実施態様38に記載のシステムにおいて、
前記動的調節は、
(1)前記粒子が捕捉される前記空気の体積を調節することと、
(2)前記空気からの前記粒子の捕捉、または前記1つ以上の感知動作のタイミングを調節することと、
(3)前記基板またはその表面を補充またはクリーニングすることと、
のうちの少なくとも1つを含む、システム。
(40) 実施態様20に記載のシステムにおいて、
前記センサは、撮像デバイスである、システム。
前記撮像デバイスは、相補型金属酸化膜半導体(CMOS)ベースの画像センサまたは電荷結合素子(CCD)ベースの画像センサのうちの1つである、システム。
(42) 実施態様20に記載のシステムにおいて、
前記基板は、光を透過させるように動作可能な、パターン化された導電性層またはパターン化された導電性フィルムを含む、システム。
(43) 実施態様42に記載のシステムにおいて、
前記パターン化された導電性フィルムは、酸化インジウムスズ(ITO)である、システム。
(44) 実施態様21に記載のシステムにおいて、
前記基板は、照明光の導波管を形成する、システム。
(45) 実施態様44に記載のシステムにおいて、
前記導波管は、二酸化ケイ素を含む機械要素を含む、システム。
前記散乱光は、複数の波長の光で散乱する、システム。
(47) 実施態様32に記載のシステムにおいて、
前記照明光源は、近紫外線(UV)または可視光である、システム。
(48) 実施態様20に記載のシステムにおいて、
前記少なくとも1つのプロセッサは、前記基板および/またはセンサを互いに対して移動させるようにさらに動作可能である、システム。
(49) 実施態様20に記載のシステムにおいて、
前記基板は、可撓性である、システム。
(50) 粒子状物質を監視するシステムにおいて、
基板を含み、前記基板上に空気から粒子を捕捉するように動作可能である、粒子捕捉サブシステムと、
前記基板上に捕捉された前記粒子に対して感知動作を実行するように動作可能である1つ以上のセンサを含む感知サブシステムと、
前記基板または前記基板の表面を、その上に捕捉された前記粒子のすべてまたは一部を除去することによって補充するように動作可能である補充サブシステムと、
前記粒子に対して実行された前記感知動作の結果に基づいて分析動作を実行するように動作可能である解析サブシステムと、
を含む、システム。
Claims (20)
- 粒子状物質を監視する方法において、
1つ以上の基板上で流れる空気から粒子を捕捉することであって、前記捕捉することは、静電および機械的捕獲器のうちの1つ以上を用いて実行され、前記1つ以上の基板は、粒子を捕捉するように構成された第1の部分と、粒子を捕捉するように構成され、第1の部分上の粒子の捕捉と同時に粒子が捕捉されない第2の部分とを含む可動テープとして形成され、そして、導波管として機能するように構成される、ことと、
導波管として前記1つ以上の基板を通って向けられた光を用いることによって、前記1つ以上の基板を照らすことと、
捕捉された前記粒子に対して、1つ以上の感知動作を実行することと、
前記1つ以上の感知動作の結果に基づいて、前記捕捉された粒子を分析することと、
を含み、
前記粒子が前記基板上で捕捉されると、前記粒子は、前記1つ以上の感知動作を前記粒子に対して実行するのに十分長い期間にわたって維持され得る前記基板に対する制御位置にくることになり、
前記可動テープが、前記可動テープの異なる部分を露出させるために機械的に前進させられるように構成されている、方法。 - 請求項1に記載の方法において、
前記1つ以上の基板は導電性であり、
前記粒子を前記1つ以上の基板上に捕捉するために、前記方法は、
前記1つ以上の基板のうちの少なくとも1つを第1の電荷で帯電させることと、
前記粒子を、前記第1の電荷の反対である第2の電荷で帯電させることと、をさらに含み、
前記粒子を前記第2の電荷で帯電させることにより、前記粒子が、前記1つ以上の基板に向かって、またその上へとそれる、方法。 - 請求項1に記載の方法において、
前記1つ以上の基板は、フィルターを含み、
前記粒子を前記1つ以上の基板上に捕捉するために、前記方法は、
前記空気が、前記1つ以上の基板の前記フィルターを通って、またはこの上を流れることを可能にし、それによって、前記空気中の前記粒子を、前記フィルターのうちの1つ以上によって捕捉させることをさらに含む、方法。 - 請求項2または3に記載の方法において、
前記1つ以上の基板は、前記粒子の付着を高めるかまたは制御するように構成されている改質表面を含み、
前記粒子は、前記1つ以上の基板の前記改質表面に付着することによって前記1つ以上の基板上に捕捉される、方法。 - 請求項1に記載の方法において、
前記粒子の捕捉が前記可動のテープの別の部分で実行されるように前記可動のテープを機械的に前進させることによって、前記粒子が捕捉される前記1つ以上の基板の少なくとも一部を補充することをさらに含む、方法。 - 請求項2に記載の方法において、
前記粒子が捕捉される前記1つ以上の基板の少なくとも1つの表面を、機械的手段および静電手段のうちの1つ以上を用いてクリーニングすることをさらに含み、
前記少なくとも1つの表面を、静電手段を用いてクリーニングするため、前記方法は、
前記捕捉された粒子を、前記第1の電荷に等しい第3の電荷で帯電させるようにさらに機能し、
前記捕捉された粒子を、前記第3の電荷で帯電させることにより、前記粒子は、前記1つ以上の基板から離れて分離する、方法。 - 請求項1に記載の方法において、
前記1つ以上の感知動作は、音響感知、電磁感知、および誘電感知のうちの1つ以上と、光学感知とを実行するように構成された1つ以上のセンサによって実行される、方法。 - 請求項1に記載の方法において、
前記1つ以上の感知動作の結果は、前記1つ以上の基板上に捕捉された前記粒子の1つ以上の画像を含み、
前記捕捉された粒子を分析することは、
前記捕捉された粒子の前記画像から前記粒子に対応する粒子データを識別することを含む、方法。 - 請求項8に記載の方法において、
前記捕捉された粒子を分析することは、
汚染または粒子状物質情報を、前記粒子データに基づいて計算することをさらに含む、方法。 - 請求項1に記載の方法において、
前記粒子を捕捉するステップ、前記1つ以上の感知動作を行うステップ、および前記捕捉された粒子を分析するステップのうちの1つ以上の態様を動的に調節することをさらに含む、方法。 - 請求項10に記載の方法において、
前記動的に調節することは、
(1)前記1つ以上の感知動作の結果または前記捕捉された粒子の分析の結果の少なくとも1つ以上に基づいて、前記粒子が捕捉される前記空気の体積または前記空気の体積流量を調節することと、
(2)前記1つ以上の感知動作の結果または前記捕捉された粒子の分析の結果の少なくとも1つ以上に基づいて、前記粒子の捕捉、前記1つ以上の感知動作の実行、または前記捕捉された粒子の分析を実行するタイミングを調節することと、
(3)前記1つ以上の感知動作の結果または前記捕捉された粒子の分析の結果の少なくとも1つ以上に基づいて、前記可動テープを機械的に前進させることによって、前記1つ以上の基板またはその表面を補充することと、
を含む、方法。 - 粒子状物質を監視するためのシステムにおいて、
静電および機械的捕獲器のうちの1つ以上を用いて流れる空気から粒子を捕捉するように動作可能な基板であって、前記基板は、粒子を捕捉するように構成された第1の部分と、粒子を捕捉するように構成され、第1の部分上の粒子の捕捉と同時に粒子が捕捉されない第2の部分とを含む可動テープとして形成され、そして、導波管として機能するように構成される、基板と、
捕捉された前記粒子に対して1つ以上の感知動作を実行するように動作可能なセンサと、
前記センサに、前記捕捉された粒子に対して前記1つ以上の感知動作を実行させるように動作可能な少なくとも1つのプロセッサと、
照明光源と、
を含み、
前記センサは、カメラを含み、前記センサは、最適な感知を実行するように構成され、
前記最適な感知を実行するために、
(1)前記少なくとも1つのプロセッサは、導波管として前記基板を用いることで前記基板を通して光を向けることによって、前記照明光源に前記基板を照らさせるように動作可能であり、
(2)前記センサは、前記基板上に捕捉された前記粒子によって散乱する散乱光を検出するものであり、
前記基板、前記センサ、および前記少なくとも1つのプロセッサは、通信可能に連結され、
前記粒子が前記基板上に捕捉されると、前記粒子は、前記1つ以上の感知動作を前記粒子に対して実行するのに十分長い期間にわたって維持され得る前記基板に対する制御位置にくることになり、
前記可動テープが、前記可動テープの異なる部分を露出させるために機械的に前進させられるように構成されている、システム。 - 請求項12に記載のシステムにおいて、
前記基板は、導電性材料を含み、
前記粒子を前記基板上に捕捉するために、前記少なくとも1つのプロセッサは、
前記基板を第1の電荷で帯電させ、
前記空気中の前記粒子を、前記第1の電荷の反対である第2の電荷で帯電させる、
ように動作可能であり、
前記粒子を前記第2の電荷で帯電させることにより、前記粒子が、前記基板に向かって、またその上へとそれる、システム。 - 請求項12または13に記載のシステムにおいて、
空気の流れを増減させるように動作可能な空気ポンプをさらに含み、
前記基板は、フィルターを含み、
前記粒子を前記基板上に捕捉するために、前記少なくとも1つのプロセッサは、
前記空気ポンプに、前記基板の前記フィルターを通るか、またはこの上での、前記粒子を含有する前記空気の流れを増減させ、それによって、前記空気中の前記粒子を、前記フィルターのうちの1つ以上によって捕捉させるように動作可能である、システム。 - 請求項13または14に記載のシステムにおいて、
前記基板は、前記粒子の付着を高めるかまたは制御するように構成されている改質表面を含み、
前記粒子は、前記基板の前記改質表面に付着することによって前記基板上に捕捉される、システム。 - 請求項13に記載のシステムにおいて、
前記少なくとも1つのプロセッサは、機械的手段および静電手段のうちの1つ以上を用いて、前記粒子が捕捉される前記基板の少なくとも1つの表面をクリーニングさせるように、さらに動作可能であり、
前記基板の前記少なくとも1つの表面を、静電手段を用いてクリーニングするため、前記少なくとも1つのプロセッサは、
前記捕捉された粒子を、前記第1の電荷に等しい第3の電荷で帯電させるようにさらに動作可能であり、
前記捕捉された粒子を、前記第3の電荷で帯電させることにより、前記粒子は、前記基板から離れて分離する、システム。 - 請求項12に記載のシステムにおいて、
前記センサは、前記捕捉された粒子によって散乱する前記散乱光に少なくとも部分的に基づいて、前記捕捉された粒子を撮像するようにさらに動作可能である、システム。 - 請求項17に記載のシステムにおいて、
前記散乱光は、複数の波長の光で散乱する、システム。 - 請求項1に記載の方法において、
前記可動のテープは、フィルターを含む、方法。 - 請求項8または9に記載の方法において、
前記1つ以上の基板上に捕捉された前記粒子の前記1つ以上の画像は、複数の波長の光で前記捕捉された粒子によって散乱する散乱光に少なくとも部分的に基づく、方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662436030P | 2016-12-19 | 2016-12-19 | |
| US62/436,030 | 2016-12-19 | ||
| PCT/US2017/067336 WO2018118934A1 (en) | 2016-12-19 | 2017-12-19 | Systems and methods for monitoring air particulate matter |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2020514769A JP2020514769A (ja) | 2020-05-21 |
| JP2020514769A5 JP2020514769A5 (ja) | 2021-01-14 |
| JP7127052B2 true JP7127052B2 (ja) | 2022-08-29 |
Family
ID=62627412
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019554492A Active JP7127052B2 (ja) | 2016-12-19 | 2017-12-19 | 大気粒子状物質を監視するためのシステムおよび方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11428618B2 (ja) |
| EP (1) | EP3555599B1 (ja) |
| JP (1) | JP7127052B2 (ja) |
| KR (1) | KR102478618B1 (ja) |
| CN (1) | CN110325844A (ja) |
| WO (1) | WO2018118934A1 (ja) |
Families Citing this family (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12098983B2 (en) * | 2017-01-18 | 2024-09-24 | Clad Innovations Ltd. | Duct mounted air quality monitoring system, method and device |
| US11380438B2 (en) | 2017-09-27 | 2022-07-05 | Honeywell International Inc. | Respiration-vocalization data collection system for air quality determination |
| CZ307891B6 (cs) * | 2018-07-30 | 2019-06-26 | Ústav experimentání medicíny AV ČR, v.v.i. | Způsob a zařízení k detekci koncentrace částic, zvláště nanočástic |
| DE102018216527B4 (de) * | 2018-09-27 | 2024-11-07 | Robert Bosch Gmbh | Verfahren, Vorrichtung und Computerprogramm zum Betreiben eines Partikelzählers eines mobilen Endgeräts |
| US11349946B2 (en) * | 2018-11-16 | 2022-05-31 | Sap Se | Dynamic streaming analytics |
| EP3894835A1 (en) * | 2018-12-11 | 2021-10-20 | Carrier Corporation | Calibration of an optical detector using a micro-flow chamber |
| US11662302B2 (en) | 2018-12-11 | 2023-05-30 | Carrier Corporation | Calibration of optical detector |
| EP3894837B1 (en) | 2018-12-11 | 2024-04-10 | Carrier Corporation | Calibration of an optical detector |
| EP3948209B8 (en) * | 2019-03-25 | 2024-09-18 | Wlab Ltd | System for tracking airborne particles |
| US10876949B2 (en) | 2019-04-26 | 2020-12-29 | Honeywell International Inc. | Flow device and associated method and system |
| JP7288345B2 (ja) * | 2019-05-23 | 2023-06-07 | 株式会社堀場製作所 | 粒子径分布測定装置、粒子径分布測定方法、及び、粒子径分布測定装置用プログラム |
| US10794810B1 (en) | 2019-08-02 | 2020-10-06 | Honeywell International Inc. | Fluid composition sensor device and method of using the same |
| KR102739071B1 (ko) | 2019-08-05 | 2024-12-06 | 삼성전자주식회사 | 미세먼지 측정 장치 및 방법 |
| EP3839474B1 (en) | 2019-12-20 | 2024-11-06 | Imec VZW | A collector for collecting particles in air and a device for detecting particles in air |
| EP3839478B1 (en) | 2019-12-20 | 2024-03-20 | Imec Vzw | A device for detecting particles in air |
| US11221288B2 (en) | 2020-01-21 | 2022-01-11 | Honeywell International Inc. | Fluid composition sensor device and method of using the same |
| FI129009B (en) * | 2020-02-05 | 2021-05-14 | Dekati Oy | Method and device for monitoring the density of aerosol particles |
| US11181456B2 (en) | 2020-02-14 | 2021-11-23 | Honeywell International Inc. | Fluid composition sensor device and method of using the same |
| US11333593B2 (en) | 2020-02-14 | 2022-05-17 | Honeywell International Inc. | Fluid composition sensor device and method of using the same |
| US11391613B2 (en) | 2020-02-14 | 2022-07-19 | Honeywell International Inc. | Fluid composition sensor device and method of using the same |
| CN111389589B (zh) * | 2020-02-28 | 2025-07-29 | 悠飞(广东顺德)环境科技有限公司 | 一种细微颗粒物污染源的捕集、杀灭及脱敏模组 |
| CN111380788A (zh) * | 2020-04-30 | 2020-07-07 | 辽宁工程技术大学 | 一种空气中粉尘监测系统 |
| US12111257B2 (en) | 2020-08-26 | 2024-10-08 | Honeywell International Inc. | Fluid composition sensor device and method of using the same |
| CN112186709B (zh) * | 2020-08-26 | 2023-03-31 | 南京龙渊众创信息科技股份有限公司 | 一种用于物联网通信的防静电保护系统及保护方法 |
| CN112284445B (zh) * | 2020-09-15 | 2022-06-21 | 湖北威尔达服饰有限公司 | 一种服装质量生产用的监测装置 |
| DE102020127714A1 (de) * | 2020-10-21 | 2022-04-21 | Ebm-Papst Mulfingen Gmbh & Co. Kg | Warnmelder zur Warnung vor einer zu hohen Luftbelastung der Luft mit Partikeln und insbesondere Viren einer bestimmten Größe |
| US11835432B2 (en) | 2020-10-26 | 2023-12-05 | Honeywell International Inc. | Fluid composition sensor device and method of using the same |
| EP4317968A4 (en) * | 2021-03-26 | 2024-09-18 | Shimadzu Corporation | OPTICAL INSPECTION DEVICE AND OPTICAL INSPECTION METHOD |
| US12281976B2 (en) * | 2021-05-13 | 2025-04-22 | Honeywell International Inc. | In situ fluid sampling device and method of using the same |
| US12200332B1 (en) * | 2021-09-24 | 2025-01-14 | Apple Inc. | Camera module particle capture by sticky dust trap epoxy |
| CN115436243A (zh) * | 2022-08-13 | 2022-12-06 | 天津智易时代科技发展有限公司 | 一种用于大气颗粒物监测的走纸方法、装置、设备及介质 |
| KR20260029302A (ko) * | 2023-05-31 | 2026-03-04 | 바이오나브 엘엘씨 | 필터 상의 이물질을 식별하기 위한 기술 |
| CN119738324B (zh) * | 2024-11-01 | 2025-11-14 | 湖南科技大学 | 基于图像处理的粉尘检测方法、装置及相关设备 |
| CN121113807A (zh) * | 2025-07-31 | 2025-12-12 | 中国科学院大气物理研究所 | 一种基于介质循环的实时全息颗粒物测量系统 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004301768A (ja) | 2003-03-31 | 2004-10-28 | Kitakyushu Foundation For The Advancement Of Industry Science & Technology | 浮遊微粒子分析方法及びそれに用いられる浮遊微粒子捕集装置 |
| US20040227938A1 (en) | 2003-05-14 | 2004-11-18 | Lockheed Martin Corporation | System and method of aerosolized agent capture and detection |
| WO2011045961A1 (ja) | 2009-10-16 | 2011-04-21 | 国立大学法人群馬大学 | 粒径計測装置、及び粒径計測方法 |
| US20160290912A1 (en) | 2015-03-06 | 2016-10-06 | Scanit Technologies, Inc. | Personal airborne particle monitor with quantum dots |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB9523812D0 (en) * | 1995-11-21 | 1996-01-24 | Sun Electric Uk Ltd | Method and apparatus for analysis of particulate content of gases |
| US6055052A (en) | 1998-01-26 | 2000-04-25 | Mie Corporation | System for, and method of, monitoring airborne particulate, including particulate of the PM2.5 class |
| US7578973B2 (en) * | 1998-11-13 | 2009-08-25 | Mesosystems Technology, Inc. | Devices for continuous sampling of airborne particles using a regenerative surface |
| US7248716B2 (en) | 2001-07-06 | 2007-07-24 | Palantyr Research, Llc | Imaging system, methodology, and applications employing reciprocal space optical design |
| US7338168B2 (en) * | 2001-07-06 | 2008-03-04 | Palantyr Research, Llc | Particle analyzing system and methodology |
| WO2004031743A1 (en) * | 2002-10-07 | 2004-04-15 | The Secretary Of State For Defence | A waveguide structure |
| US7168292B2 (en) | 2003-05-15 | 2007-01-30 | The Regents Of The University Of California | Apparatus for particulate matter analysis |
| US7006923B1 (en) | 2004-05-19 | 2006-02-28 | The United States Of America As Represented By The Secretary Of The Navy | Distributed biohazard surveillance system and apparatus for adaptive collection and particulate sampling |
| KR100697559B1 (ko) * | 2004-08-31 | 2007-03-21 | 주식회사 에이디피엔지니어링 | 기판 검사 장치 |
| GB0424658D0 (en) * | 2004-11-05 | 2005-06-01 | Bae Systems Plc | Particle sampling device |
| US7233711B1 (en) | 2005-05-11 | 2007-06-19 | Hewlett Packard Development Company, L.P. | Autonomous evanescent optical nanosensor |
| CA2993208C (en) | 2007-11-15 | 2021-01-26 | Garrett Thermal Systems Limited | Particle detection |
| US9464790B2 (en) | 2012-05-08 | 2016-10-11 | Cooper Technologies Company | Systems, methods, and devices for providing rotatable light modules and hinged mount in a luminaire |
| US8879797B2 (en) | 2012-05-25 | 2014-11-04 | Fluid Imaging Technologies, Inc. | System and method for total internal reflection enhanced imaging flow cytometry |
| JP2014048100A (ja) | 2012-08-30 | 2014-03-17 | Sharp Corp | 粒子検出装置 |
| HK1213630A1 (zh) * | 2012-10-16 | 2016-07-08 | 爱克斯崔里斯科技有限公司 | 微粒探测寻址技术 |
| US9851299B2 (en) | 2014-10-25 | 2017-12-26 | Isle Management Co. | Method of analyzing air quality |
| WO2016073745A2 (en) | 2014-11-07 | 2016-05-12 | Richard Lucas | Automated airborne particulate matter collection, imaging, identification, and analysis |
| US10908062B2 (en) * | 2015-03-06 | 2021-02-02 | Scanit Technologies, Inc. | Airborne particle monitor |
| WO2017066137A1 (en) * | 2015-10-12 | 2017-04-20 | 3M Innovative Properties Company | Optical assembly with cable retainer |
-
2017
- 2017-12-19 WO PCT/US2017/067336 patent/WO2018118934A1/en not_active Ceased
- 2017-12-19 JP JP2019554492A patent/JP7127052B2/ja active Active
- 2017-12-19 US US16/466,786 patent/US11428618B2/en active Active
- 2017-12-19 EP EP17884881.8A patent/EP3555599B1/en active Active
- 2017-12-19 KR KR1020197020493A patent/KR102478618B1/ko active Active
- 2017-12-19 CN CN201780086791.6A patent/CN110325844A/zh active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004301768A (ja) | 2003-03-31 | 2004-10-28 | Kitakyushu Foundation For The Advancement Of Industry Science & Technology | 浮遊微粒子分析方法及びそれに用いられる浮遊微粒子捕集装置 |
| US20040227938A1 (en) | 2003-05-14 | 2004-11-18 | Lockheed Martin Corporation | System and method of aerosolized agent capture and detection |
| WO2011045961A1 (ja) | 2009-10-16 | 2011-04-21 | 国立大学法人群馬大学 | 粒径計測装置、及び粒径計測方法 |
| US20160290912A1 (en) | 2015-03-06 | 2016-10-06 | Scanit Technologies, Inc. | Personal airborne particle monitor with quantum dots |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102478618B1 (ko) | 2022-12-16 |
| US11428618B2 (en) | 2022-08-30 |
| US20190346356A1 (en) | 2019-11-14 |
| CN110325844A (zh) | 2019-10-11 |
| EP3555599B1 (en) | 2024-07-31 |
| WO2018118934A1 (en) | 2018-06-28 |
| JP2020514769A (ja) | 2020-05-21 |
| KR20190100248A (ko) | 2019-08-28 |
| EP3555599A4 (en) | 2020-08-12 |
| EP3555599A1 (en) | 2019-10-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7127052B2 (ja) | 大気粒子状物質を監視するためのシステムおよび方法 | |
| CN112304820B (zh) | 流体组合物传感器设备及其使用方法 | |
| US11275011B2 (en) | Automated airborne particulate matter collection, imaging, identification, and analysis | |
| JP2020514769A5 (ja) | ||
| CN113218823B (zh) | 流体组合物传感器设备及其使用方法 | |
| US8891895B2 (en) | Systems and methods for imaging of falling objects | |
| RU2645448C2 (ru) | Система камеры и способ очищения объектива камеры | |
| US11619574B2 (en) | Device for detecting particles in air | |
| US20210405007A1 (en) | Low-flow size-selective inlet for air quality sensors and air quality sensor | |
| US20200355597A1 (en) | Automated airborne particulate matter collection, sampling, imaging, identification, measuring, and analysis system | |
| JP7841870B2 (ja) | 流体組成センサ装置及びその使用方法 | |
| CN108106974A (zh) | 表面沉积粒子的实时累计测定及图像分析装置 | |
| US20260086013A1 (en) | Virtual impactor-based label-free particulate matter detection using holography and deep learning | |
| CN118587813A (zh) | 一种自动售货机管理系统 | |
| SI26418A (sl) | Optični detektor mikro delcev | |
| CN121680387A (zh) | 无人环卫车辆清洁作业自动控制方法及相关设备 | |
| WO2021165529A1 (fr) | Dispositif de collecte par impaction de particules contenues dans l'air ambiant sur un ruban adhésif transparent et procédé associé | |
| Garrett et al. | Systems and Methods for Imaging of Falling Objects | |
| CN108435744A (zh) | 金属颗粒收集装置及金属颗粒收集系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191218 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201120 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201120 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20211015 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211026 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20220126 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220325 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220719 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220817 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7127052 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |