JP7126029B2 - 制御装置、制御方法、およびプログラム - Google Patents
制御装置、制御方法、およびプログラム Download PDFInfo
- Publication number
- JP7126029B2 JP7126029B2 JP2021542579A JP2021542579A JP7126029B2 JP 7126029 B2 JP7126029 B2 JP 7126029B2 JP 2021542579 A JP2021542579 A JP 2021542579A JP 2021542579 A JP2021542579 A JP 2021542579A JP 7126029 B2 JP7126029 B2 JP 7126029B2
- Authority
- JP
- Japan
- Prior art keywords
- frequency band
- base station
- communication
- switching
- radio base
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 19
- 238000004891 communication Methods 0.000 claims description 178
- 238000012545 processing Methods 0.000 claims description 83
- 238000001514 detection method Methods 0.000 claims description 5
- 238000007726 management method Methods 0.000 description 33
- 238000010586 diagram Methods 0.000 description 14
- 238000003384 imaging method Methods 0.000 description 8
- RZVHIXYEVGDQDX-UHFFFAOYSA-N 9,10-anthraquinone Chemical compound C1=CC=C2C(=O)C3=CC=CC=C3C(=O)C2=C1 RZVHIXYEVGDQDX-UHFFFAOYSA-N 0.000 description 7
- 238000012546 transfer Methods 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 238000005401 electroluminescence Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000012384 transportation and delivery Methods 0.000 description 1
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C13/00—Control systems or transmitting systems for actuating flying-control surfaces, lift-increasing flaps, air brakes, or spoilers
- B64C13/02—Initiating means
- B64C13/16—Initiating means actuated automatically, e.g. responsive to gust detectors
- B64C13/20—Initiating means actuated automatically, e.g. responsive to gust detectors using radiated signals
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04M—TELEPHONIC COMMUNICATION
- H04M11/00—Telephonic communication systems specially adapted for combination with other electrical systems
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W36/00—Hand-off or reselection arrangements
- H04W36/08—Reselecting an access point
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W72/00—Local resource management
- H04W72/04—Wireless resource allocation
Landscapes
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Automation & Control Theory (AREA)
- Aviation & Aerospace Engineering (AREA)
- Mobile Radio Communication Systems (AREA)
Description
本発明は、制御装置、制御方法、およびプログラムに関する。
本願は、2019年08月29日に、日本に出願された特願2019-156833号に基づき優先権を主張し、その内容をここに援用する。
本願は、2019年08月29日に、日本に出願された特願2019-156833号に基づき優先権を主張し、その内容をここに援用する。
従来、飛行体が出発地から飛行して目的地に到着するまでの飛行範囲に存在する複数の無線区間のうち、出発地から目的地まで無線通信が繋がる飛行無線区域を選出し、選出した飛行無線区域に位置する無線基地局に対して、飛行体と無線通信を行うための通信帯域を予約して飛行体の飛行制御を行う技術が開示されている(例えば、特許文献1参照)。
しかしながら、従来の技術では、複数の周波数帯で無線通信を行う場合に、飛行体と通信する無線基地局を切り換える場合の制御について十分に検討されていなかった。
本発明は、このような事情を考慮してなされたものであり、冗長性を継続的に維持するための切換制御を行うことができる制御装置、制御方法、およびプログラムを提供することを目的の一つとする。
この発明に係る制御装置、制御方法、およびプログラムは、以下の構成を採用した。
(1):この発明の一態様に係る制御装置は、二以上の周波数帯で無線基地局と通信する通信装置を備える飛行体に搭載される制御装置であって、前記無線基地局との間における通信エラーの発生回数を周波数帯ごとにカウントする通信エラー検知部と、周波数帯ごとの通信エラーのカウント値が所定値以上となった場合、前記カウント値が前記所定値以上となった周波数帯で前記通信装置が通信する無線基地局を切り換える切換処理部を備え、前記切換処理部は、前記通信装置が通信する無線基地局を切り換えるタイミングを周波数帯ごとに異ならせるものである。
(1):この発明の一態様に係る制御装置は、二以上の周波数帯で無線基地局と通信する通信装置を備える飛行体に搭載される制御装置であって、前記無線基地局との間における通信エラーの発生回数を周波数帯ごとにカウントする通信エラー検知部と、周波数帯ごとの通信エラーのカウント値が所定値以上となった場合、前記カウント値が前記所定値以上となった周波数帯で前記通信装置が通信する無線基地局を切り換える切換処理部を備え、前記切換処理部は、前記通信装置が通信する無線基地局を切り換えるタイミングを周波数帯ごとに異ならせるものである。
(2):上記(1)の態様において、前記切換処理部は、前記無線基地局の切り換えを開始してから第1所定時間が経過するまでの間、前記通信装置に、前記無線基地局を切り換えた周波数帯以外の周波数帯で無線基地局を切り換えさせることを抑制するものである。
(3):上記(2)の態様において、前記第1所定時間は、前記通信装置が前記無線基地局を切り換えるための所要時間よりも長い時間である。
(4):上記(1)~(3)の態様において、前記切換処理部は、前記無線基地局の切り換えを完了した後、前記通信装置に、切り換えた後の前記無線基地局から別の前記無線基地局に切り換えさせることを一時的に抑制するものである。
(5):本発明の他の態様に係る制御方法は、二以上の周波数帯で無線基地局と通信する通信装置を備える飛行体に搭載される制御装置が、前記無線基地局との間における通信エラーの発生回数を周波数帯ごとにカウントし、周波数帯ごとの通信エラーのカウント値が所定値以上となった場合、前記カウント値が前記所定値以上となった周波数帯で通信する無線基地局を切り換え、前記通信装置が通信する無線基地局を切り換えるタイミングを周波数帯ごとに異ならせるものである。
(6):本発明の他の態様に係るプログラムは、二以上の周波数帯で無線基地局と通信する通信装置を備える飛行体に搭載される制御装置に、前記無線基地局との間における通信エラーの発生回数を周波数帯ごとにカウントする処理と、周波数帯ごとの通信エラーのカウント値が所定値以上となった場合、前記カウント値が前記所定値以上となった周波数帯で通信する無線基地局を切り換える処理と、前記通信装置が通信する無線基地局を切り換えるタイミングを周波数帯ごとに異ならせる処理と、を実行させるものである。
(1)~(6)によれば、冗長性を継続的に維持するための切換制御を行うことができる。
以下、図面を参照し、本発明の制御装置、制御方法、およびプログラムの実施形態について説明する。制御装置は、例えば、ドローン(UAV:Unmanned Aerial Vehicle)などの飛行体に搭載される。以下の説明では飛行体がドローンであるものとするが、飛行体は自動制御されるヘリコプターや航空機であってもかまわない。
[構成]
図1は、制御装置を利用した管制システム1の一例を示す図である。管制システム1では、一以上のドローン100が、無線基地局70と通信しながら飛行する。ドローン100の飛行に関する大まかな制御は、地上にある管理装置10によって行われる。例えば、管理装置10は、予め指定された出発地点から到着地点までの経路を生成し、経路の情報(飛行制御のための情報)を、時間の経過と共に逐次、ネットワークNWおよび無線基地局70を介してドローン100に送信する。ネットワークNWは、WAN(Wide Area Network)やLAN(Local Area Network)、インターネットなどを含む。
図1は、制御装置を利用した管制システム1の一例を示す図である。管制システム1では、一以上のドローン100が、無線基地局70と通信しながら飛行する。ドローン100の飛行に関する大まかな制御は、地上にある管理装置10によって行われる。例えば、管理装置10は、予め指定された出発地点から到着地点までの経路を生成し、経路の情報(飛行制御のための情報)を、時間の経過と共に逐次、ネットワークNWおよび無線基地局70を介してドローン100に送信する。ネットワークNWは、WAN(Wide Area Network)やLAN(Local Area Network)、インターネットなどを含む。
ドローン100は、例えば、内部にGNSS(Global Navigation Satellite System)受信機などの位置測位手段を備えており、管理装置10から受信した経路の情報に従って飛行するように自律飛行を行う。制御装置は、この自律飛行を制御するものである。ドローン100は、飛行に伴って最も通信しやすい無線基地局70が変化するので、随時、通信相手の無線基地局70を切り替えながら飛行する。管理装置10の態様は上記に限らず、操作者が手動で操作子(リモートコントローラ)を操作した内容をドローン100に送信するものであってもよい。
無線基地局70とドローン100の間の通信は、二以上の周波数帯の電波を用いて行われる。無線基地局70とドローン100の間の通信は、例えば、比較的低周波な第1周波数帯f1の電波と、第1周波数帯f1よりも高周波な第2周波数帯f2の電波と、第2周波数帯f2よりも高周波な第3周波数帯f3の電波とで並行して行われる。例えば、ドローン100は、第1周波数帯f1の通信で経路の情報を取得し、第2周波数帯f2または第3周波数帯f3の通信でカメラにより撮像した画像を管理装置10に送信する。第1周波数帯f1の電波はデータ転送量が比較的小さいが、通信可能範囲が比較的広いため信頼性が高いので、飛行制御のための情報を送受信するのに向いている。一方、第2周波数帯f2または第3周波数帯f3の電波は、データ転送量が比較的大きいので、画像などの情報を送受信するのに向いている。
図2は、管理装置10の構成図である。管理装置10は、例えば、通信部20と、入力装置22と、表示装置24とを備える。通信部20は、例えば、ネットワークNWに接続するための、ネットワークカードなどの通信インターフェースである。入力装置22は、例えば、キーボードやマウス、タッチパネルなどである。表示装置24は、LCD(Liquid Crystal Display)や有機EL(Electroluminescence)表示装置、プラズマディスプレイなどである。
また、管理装置10は、第1通信制御部32と、ドローン位置管理部34と、経路決定部36と、入力受付部38と、第2通信制御部40と、画像管理部42と、表示制御部44と、第3通信制御部46と、タスク管理部48とを備える。これらの構成要素は、例えば、CPU(Central Processing Unit)などのハードウェアプロセッサがプログラム(ソフトウェア)を実行することにより実現される。これらの構成要素のうち一部または全部は、LSI(Large Scale Integration)やASIC(Application Specific Integrated Circuit)、FPGA(Field-Programmable Gate Array)、GPU(Graphics Processing Unit)などのハードウェア(回路部;circuitryを含む)によって実現されてもよいし、ソフトウェアとハードウェアの協働によって実現されてもよい。プログラムは、予めHDD(Hard Disk Drive)やフラッシュメモリなどの記憶装置(非一過性の記憶媒体を備える記憶装置)に格納されていてもよいし、DVDやCD-ROMなどの着脱可能な記憶媒体(非一過性の記憶媒体)に格納されており、記憶媒体がドライブ装置に装着されることでインストールされてもよい。
また、管理装置10は、HDDやフラッシュメモリ、RAM(Random Access Memory)などの記憶装置(メモリ)に、位置管理テーブル60、タスク管理テーブル62、画像データなどの情報やデータを記憶させている。
第1通信制御部32は、無線基地局70とドローン100が第1周波数帯f1の電波で通信することを前提とした通信を制御する。例えば、第1通信制御部32は、第1周波数帯f1の電波で通信するように指示するフラグが設定されたパケットを通信部20に送信させたり、第1周波数帯f1の電波で通信することで取得されたことを示すフラグが設定されたパケットを取得してドローン位置管理部34に渡したりする。後述するようにドローン100は、自機の位置を管理装置10に第1周波数帯f1の電波でアップロードするように設定されているため、第1通信制御部32はドローン100の位置を取得可能である。また、第1通信制御部32は、経路決定部36により決定された経路の情報を、通信部20を用いてドローン100に送信する。
ドローン位置管理部34は、ドローン100によりアップロードされたドローン100の位置を位置管理テーブル60に登録する。経路決定部36は、位置管理テーブル60およびタスク管理テーブル62に登録された情報、および入力受付部38によって管理装置10の利用者から受け付けられた入力操作の内容に基づいて、ドローン100ごとの経路を決定し、第1通信制御部32および通信部20を介してドローン100に送信する。
第2通信制御部40は、無線基地局70とドローン100が第2周波数帯f2または第3周波数帯f3の電波で通信することを前提とした通信を制御する。例えば、第2通信制御部40は、第2周波数帯f2または第3周波数帯f3の電波で通信するように指示するフラグが設定されたパケットを通信部20に送信させたり、第2周波数帯f2または第3周波数帯f3の電波で通信することで取得されたことを示すフラグが設定されたパケットを取得して画像管理部42に渡したりする。後述するようにドローン100は、カメラによって撮像した画像を管理装置10に第2周波数帯f2または第3周波数帯f3でアップロードするように設定されているため、第2通信制御部40はドローン100のカメラによって撮像された画像を取得可能である。画像管理部42は、取得した画像を例えばドローン100の識別情報と対応付けて画像データ64に登録する。表示制御部44は、入力受付部38によって管理装置10の利用者から受け付けられた入力操作の内容に基づいて、画像データ64に含まれる所望の画像を表示装置24に表示させる。
第3通信制御部46は、ネットワークNWを介して外部装置(各種サーバや端末装置など)との間で行われる通信を制御する。例えば、第3通信制御部46は、ドローン100が行うべきタスクの内容を指定したタスク指定情報を外部装置から取得し、タスク管理部48に渡す。タスクとは、例えば、ある決まった地域(鉄道沿線や送電線、河川の周辺など)を飛行してカメラによる撮像を行ったり、配達物を運搬したりすることを含む。タスク管理部48は、取得したタスク指定情報をタスク管理テーブル62に登録する。
図3は、ドローン100の構成図である。ドローン100は、例えば、第1通信装置110と、第2通信装置112と、第3通信装置114と、GNSS受信機120と、センサ群122と、カメラ130と、バッテリ140と、制御装置150と、回転翼170-1~170-m(mは自然数)と、モータ172-1~172-mと、ESC(Electric Speed Controller)174-1~174-mとを備える。
第1通信装置110は、第1周波数帯f1の電波で無線基地局70と通信する。第2通信装置112は、第2周波数帯f2の電波で無線基地局70と通信する。第3通信装置114は、第3周波数帯f3の電波で無線基地局70と通信する。ドローン100は、更に、他のドローン100と通信する通信装置を備えてもよい。
GNSS受信機120は、GNSS衛星から受信した信号に基づいて、ドローン100の位置を特定する。GNSS衛星とは、GPS(Global Positioning System)、GLONAS、Galileo、BeiDou、QZSS、Gaganなどのシステムを構成する衛星である。
センサ群122は、例えば、角速度センサ、加速度センサ、高度センサ(対地距離センサ)、ジャイロセンサなどを含む。センサ群122のそれぞれのセンサは、検出結果を制御装置150に出力する。
カメラ130は、例えば、CCD(Charge Coupled Device)やCMOS(Complementary Metal Oxide Semiconductor)などの固体撮像素子を利用したカメラである。カメラ130は、例えば、ドローン100が飛行する際に下方または斜め下方を撮像可能な位置に取り付けられている。カメラ130の撮像方向は、通信によって制御可能であってもよい。
バッテリ140は、ドローン100の各部に電力を供給する二次電池である。バッテリ140は、図示しない端子にアダプタおよび商用電源が接続されることで充電される。バッテリ140は、第1通信装置110や制御装置150などに動作用の電力を、ESC174-1~174-mに回転翼駆動用の電力をそれぞれ供給する。
制御装置150は、例えば、通信制御部152と、飛行制御部154と、撮像制御部156とを備える。これらの構成要素は、例えば、CPUなどのハードウェアプロセッサがプログラム(ソフトウェア)を実行することにより実現される。これらの構成要素のうち一部または全部は、LSIやASIC、FPGA、GPUなどのハードウェア(回路部;circuitryを含む)によって実現されてもよいし、ソフトウェアとハードウェアの協働によって実現されてもよい。プログラムは、予めHDDやフラッシュメモリなどの記憶装置(非一過性の記憶媒体を備える記憶装置)に格納されていてもよいし、DVDやCD-ROMなどの着脱可能な記憶媒体(非一過性の記憶媒体)に格納されており、記憶媒体がドライブ装置に装着されることでインストールされてもよい。
通信制御部152は、第1通信装置110、第2通信装置112、および第3通信装置114のそれぞれを制御する。通信制御部152は、第1通信装置110によって得られた経路の情報などを飛行制御部154に渡したり、カメラ130によって撮像された画像を撮像制御部156から取得して第2通信装置112または第3通信装置114を用いて管理装置10にアップロードしたりする。
飛行制御部154は、管理装置10から取得した経路の情報に従ってドローン100が飛行するように、GNSS受信機120により得られたドローン100の位置、センサ群122の検出結果を参照しながらESC174-1~174-mを制御する。
撮像制御部156は、通信によって得られた指示、または予め設定された撮像時間帯のスケジュールに従い、カメラ130を動作させる。撮像制御部156は、カメラ130によって撮像された画像を通信制御部152に渡す。
回転翼170-1~170-mは、所望の数mだけドローン100に搭載されている。以下、ハイフン以下の符号を省略して説明する。それぞれの回転翼170には、モータ172のロータが連結されている。モータ172は、例えばブラシレスモータである。ESC174は、飛行制御部154からの指示に応じてモータ172に供給する電力を調整する。これによって、回転翼170ごとの回転数が個別に調整され、ドローン100が所望の姿勢で所望の方向に飛行することができる。
[飛行時の通信制御]
以下、実施形態の管制システム1において実現されるドローン100の飛行時の通信制御について説明する。図4は、制御装置150のより詳細な構成図である。通信制御部152は、例えば、システム状態判定部152Aと、切換処理部152Bとを備える。
以下、実施形態の管制システム1において実現されるドローン100の飛行時の通信制御について説明する。図4は、制御装置150のより詳細な構成図である。通信制御部152は、例えば、システム状態判定部152Aと、切換処理部152Bとを備える。
システム状態判定部152Aは、無線基地局70との間に通信エラーが発生したか否かを判定する。システム状態判定部152Aは、例えば、管理装置10からの指示が所定時間以上途切れた場合に、無線基地局70との間に通信エラーが発生したと判定する。システム状態判定部152Aは、「通信エラー検知部」の一例である。
システム状態判定部152Aは、無線基地局70との間に通信エラーが発生したと判定した場合、通信エラーの発生回数を周波数帯ごとにカウントする。システム状態判定部152Aは、例えば、無線基地局70との間に通信エラーが発生した場合、無線基地局70との通信に用いていた周波数帯に対応する通信エラーフラグをオフからオンに切り換え、エラーカウント(通信エラーのカウント値)を単位時間が経過するごとに加算する。
切換処理部152Bは、周波数帯ごとのエラーカウントが所定値以上となった場合、エラーカウントが所定値以上となった周波数帯で通信装置110,112,114が通信する無線基地局を切り換える。
図5は、ドローン100と通信する無線基地局70が切り換わる場面を示す図である。図5に示す例のように、無線基地局70の通信エリアの広さが周波数帯ごとに異なっている。この場合、周波数が低いほど通信エリアが広くなるため、第1周波数帯f1の通信エリアが第2周波数帯f2の通信エリアよりも広く、且つ、第2周波数帯f2の通信エリアが第3周波数帯f3の通信エリアよりも広い。
図示の例のように、ドローン100が「第1無線基地局」の通信エリアから「第2無線基地局」の通信エリアに向けて移動する場合、ドローン100の位置が「第1無線基地局」の通信エリアから外れて、ドローン100と「第1無線基地局」との間の通信が通信エラーを発生するタイミングは周波数帯ごとに異なる。
そのため、図6に示すように、切換処理部152Bは、切換フラグを「0」から「1」に設定し、ドローン100と通信する無線基地局70を切り替えるタイミングを周波数帯ごとに異ならせる。切換フラグは、周波数帯nごとに設定されており、通信対象の無線基地局70の切り換えを行うか否かを示している。以下、切換フラグが「1」である場合に通信対象の無線基地局70の切り換えを行い、切換フラグが「0」である場合に通信対象の無線基地局70の切り換えを行わないものとする。
同図に示す例では、切換処理部152Bは、まず、時刻t1において比較的高周波な第3周波数帯f3に対応する切換フラグを「0」から「1」に設定する。次いで、切換処理部152Bは、時刻t2において第3周波数帯f3よりも低周波な第2周波数帯f2に対応する切換フラグを「0」から「1」に設定する。その後、切換処理部152Bは、時刻t3において第2周波数帯f2よりも低周波な第1周波数帯f1に対応する切換フラグを「0」から「1」に設定する。
次に、制御装置150により実行される周波数帯nごとのエラーカウントの算出処理の一例を説明する。図7のフローチャートの処理は、例えば、所定の周期で繰り返される。
図7に示すように、まず、切換処理部152Bは、パラメータnに1を設定する(ステップS10)。パラメータnは、周波数帯の識別子であり、周波数帯のそれぞれに対して1~3までの値が一つずつ付与されているものである。以下、識別子がnである周波数帯のことを、「周波数帯n」と称する場合がある。
次に、切換処理部152Bは、周波数帯nの通信エラーフラグに「0」を設定する(ステップS12)。通信エラーフラグは、周波数帯nごとに設定されており、周波数帯nを用いた無線基地局70との通信において、通信エラーが発生したか否かを示している。通信エラーフラグは、周波数帯nのそれぞれに対して0または1の値が一つずつ付与されている。以下、通信エラーフラグが「1」である場合に通信エラーが発生し、通信エラーフラグが「0」である場合に通信エラーが発生していないものとする。
次に、システム状態判定部152Aは、周波数帯nを用いた無線基地局70との通信において、通信エラーが発生したか否かを判定する(ステップS14)。
切換処理部152Bは、システム状態判定部152Aにより、周波数帯nを用いた無線基地局70との通信において、通信エラーが発生したと判定された場合、周波数帯nのエラーカウントを1インクリメントし(ステップS16)、且つ、周波数帯nの通信エラーフラグを「1」に設定する(ステップS18)。
次に、切換処理部152Bは、周波数帯nのOKカウントに「0」を設定する(ステップS20)。OKカウントは、周波数帯nごとに設定されており、周波数帯nを用いた無線基地局70との通信において、通信エラーが復旧してからの経過時間を示している。OKカウントは、周波数帯nのそれぞれに対して0以上の整数値が一つずつ付与されている。
切換処理部152Bは、システム状態判定部152Aにより、周波数帯nを用いた無線基地局70との通信において、通信エラーが発生していないと判定された場合、周波数帯nのOKカウントを1インクリメントする(ステップS22)。
次に、切換処理部152Bは、周波数帯nを用いた無線基地局70との通信において、無線基地局70の切り換えがあるか否かを判定する(ステップS24)。切換処理部152Bは、例えば、周波数帯nのエラーカウントが所定値以上となった場合に、通信エラーフラグが「1」に設定された周波数帯を含まないことを条件に、周波数帯nを用いた無線基地局70との通信において、無線基地局70の切り換えがあると判定する。すなわち、切換処理部152Bは、周波数帯nのエラーカウントが所定値以上となった場合に、第1~第3周波数の全ての通信エラーフラグが「0」に設定されている場合には、周波数帯nを用いた無線基地局70との通信において、無線基地局70の切り換えがあると判定する。一方、切換処理部152Bは、周波数帯nのエラーカウントが所定値以上となった場合であっても、第1~第3周波数のいずれかの通信エラーフラグが「1」に設定されている場合には、周波数帯nを用いた無線基地局70との通信において、無線基地局70の切り換えがないと判定する。
切換処理部152Bは、周波数帯nを用いた無線基地局70との通信において、無線基地局70の切り換えがあると判定した場合、周波数帯nの切換フラグに「1」を設定する(ステップS26)。
次に、切換処理部152Bは、周波数帯nの切換後カウントをカウント初期値に設定する(ステップS28)。切換後カウントは、周波数帯nごとに設定されており、無線基地局70との通信に用いる周波数帯を周波数帯nに切り換えてからの経過時間を示している。切換後カウントは、周波数帯nのそれぞれに対して0以上の整数値が一つずつ付与されている。カウント初期値は、周波数帯nごとに設定されており、無線基地局70との通信に用いる周波数帯が周波数帯nに切り換わってから、その他の周波数帯を用いて通信対象の無線基地局70が切り換わることが許容されるまでの時間に相当している。カウント初期値は、周波数帯nのそれぞれに対して1以上の整数値が一つずつ付与されている。
次に、切換処理部152Bは、周波数帯nの切換後カウントが0よりも大きいか否かを判定する(ステップS30)。
一方、切換処理部152Bは、周波数帯nを用いた無線基地局70との通信において、無線基地局70の切り換えがないと判定した場合、周波数帯nの切換後カウントが0よりも大きいか否かを判定する(ステップS30)。
切換処理部152Bは、周波数帯nの切換後カウントが0よりも大きいと判定した場合、周波数帯nの切換後カウントを1デクリメントし(ステップS32)、周波数帯nの通信エラーフラグを「1」に設定する(ステップS34)。
一方、切換処理部152Bは、周波数帯nの切換後カウントが0となったと判定した場合、ステップS32の処理を経ることなく、その処理をステップS36に移行する。
次に、切換処理部152Bは、ステップS36において、ステップ周波数帯nのOKカウントが第1閾値よりも大きく、且つ、周波数帯nのエラーカウントが第2閾値よりも大きいか否かを判定する。
切換処理部152Bは、周波数帯nのOKカウントが第1閾値よりも大きく、且つ、周波数帯nのエラーカウントが第2閾値よりも大きいと判定した場合、周波数帯nのエラーカウントに周波数帯nの係数を積算する(ステップS38)。周波数帯nの係数は、周波数帯nごとに設定されており、通信対象の無線基地局70の切り換えが完了してから所定時間が経過した時点で、エラーカウントを小さくする補正を行うための係数である。周波数帯nの係数は、例えば、0~1までの数値範囲に含まれる値である。
次に、切換処理部152Bは、周波数帯nの切換フラグに「0」を設定する(ステップS40)。
切換処理部152Bは、周波数帯nのOKカウントが第1閾値以下であると判定した場合、または、周波数帯nのエラーカウントが第2閾値以下であると判定した場合には、ステップS38~ステップS40の処理を経ることなく、その処理をステップS42に移行する。
その後、切換処理部152Bは、ステップS42において、パラメータnが、周波数帯の識別子の最大値である3以上であるか否かを判定する。切換処理部152Bは、パラメータnが3未満であると判定した場合、パラメータnを1インクリメントし(ステップS44)、その処理をステップS12に戻す。そして、切換処理部152Bは、パラメータnが3以上となるまで、ステップS12~ステップS44の処理を繰り返す。一方、切換処理部152Bは、パラメータnが3以上であると判定した場合、本フローチャートの1サイクルの処理を完了させる。
なお、本実施形態では、3個の周波数帯を備えた場合を記載しているが、周波数帯の数は3つに限定されるものではない。例えば、k個(k:自然数)の周波数帯を備えた場合は、ステップS42の処理が、パラメータnがk以上であるか否かを判定する処理に変更される。
次に、図8を参照して、切換処理部152Bが通信対象の無線基地局70を切り換える場合の動作について説明する。図8は、周波数帯ごとの通信エラーフラグ、および、周波数帯ごとのエラーカウントの時間変化の一例を示している。
図8に示す例では、時刻t1において、切換処理部152Bが周波数帯(1)の通信エラーフラグを「0」から「1」に切り替える。この場合、切換処理部152Bは、周波数帯(1)のエラーカウントの加算を開始する。
次に、時刻t2において、切換処理部152Bが周波数帯(2)の通信エラーフラグを「0」から「1」に切り替え、周波数帯(2)のエラーカウントの加算を開始する。
次に、時刻t3において、周波数帯(1)のエラーカウントが所定値となった場合、切換処理部152Bが周波数帯(1)のエラーカウントの加算を停止する。また、切換処理部152Bは、時刻t3から起算して、切換処理部152Bが無線基地局70を切り換えるための所要時間が経過するまでの間は、周波数帯(1)のエラーカウントの値を維持する。
次に、時刻t4において、時刻t3から起算して、無線基地局70を切り換えるための所要時間が経過した場合、切換処理部152Bが周波数帯(1)の通信エラーフラグを「1」から「0」に切り換える。また、切換処理部152Bが周波数帯(1)のエラーカウントを補正して小さくする。これにより、切換処理部152Bは、無線基地局70の切り換えを完了した後、通信装置110,112,114に、切り換えた後の無線基地局70から別の無線基地局に切り換えさせることを一時的に抑制する。
この場合、切換処理部152Bは、無線基地局70の切り換えを開始してから第1所定時間が経過するまでの間、通信装置110,112,114に、無線基地局70を切り換えた周波数帯以外の周波数帯で無線基地局70を切り換えさせることを抑制する、第1所定時間は、通信装置110,112,114が無線基地局70を切り換えるための所要時間よりも長い時間である、この例では、時刻t4において、周波数帯(2)のエラーカウントが所定値以上であるものの、時刻t3から起算して、第1所定時間が経過していない。そのため、切換処理部152Bは、周波数帯(2)のエラーカウントの加算を維持し、且つ、周波数帯(2)の通信エラーフラグを「1」に維持する。
次に、時刻t5において、時刻t3から起算して、無線基地局70を切り換えるための第1所定時間が経過した場合、切換処理部152Bが周波数帯(2)のエラーカウントの加算を停止する。
その後、時刻t6において、時刻t5から起算して、無線基地局70を切り換えるための所要時間を経過した場合、切換処理部152Bが周波数帯(2)の通信エラーフラグを「1」から「0」に切り換える。また、切換処理部152Bが周波数帯(2)のエラーカウントを補正して小さくする。
次に、図9のフローチャートの処理について説明する。図9は、切換処理部152Bが無線基地局70との通信に用いる周波数帯を選択する場合の処理の一例を示している。図9のフローチャートの処理は、例えば、所定の周期で繰り返される。
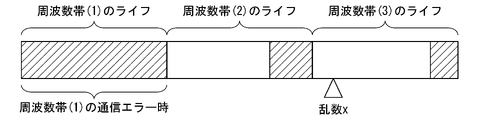
図9に示すように、まず、切換処理部152Bは、乱数xを発生させる(ステップS50)。乱数xは、0~ライフ×3の範囲からランダムに選択される値である。
次に、切換処理部152Bは、パラメータα1、パラメータα2、およびパラメータα3を算出する(ステップS52)。パラメータα1は、周波数帯(1)のエラーカウントの値、および、周波数帯(1)の通信エラーフラグにライフを積算した値のうち相対的に大きい値である。パラメータα2は、周波数帯(2)のエラーカウントの値、および、周波数帯(2)の通信エラーフラグにライフを積算した値のうち相対的に大きい値である。パラメータα3は、周波数帯(3)のエラーカウントの値、および、周波数帯(3)の通信エラーフラグにライフを積算した値のうち相対的に大きい値である。切換処理部152Bは、各対応する周波数帯で通信エラーが発生していない場合には、周波数帯のエラーカウントの値をパラメータα1、パラメータα2、およびパラメータα3として算出し、各対応する周波数帯で通信エラーが発生している場合には、ライフの値をパラメータα1、パラメータα2、およびパラメータα3として算出する。
次に、切換処理部152Bは、乱数xが「0」~「ライフ-α1」までの範囲にあるか否かを判定する(ステップS54)。切換処理部152Bは、乱数xが「0」~「ライフ-α1」まで範囲にあると判定した場合には、無線基地局70との通信に用いる周波数帯として、周波数帯(1)を選択する(ステップS56)。これによって、本フローチャートの処理が終了する。
切換処理部152Bは、乱数xが「0」~「ライフ-α1」までの範囲にはないと判定した場合には、乱数xが「ライフ」~「ライフ×2-α2」までの範囲にあるか否かを判定する(ステップS58)。切換処理部152Bは、乱数xが「ライフ」~「ライフ×2-α2」までの範囲にあると判定した場合、無線基地局70との通信に用いる周波数帯として、周波数帯(2)を選択する(ステップS60)。これによって、本フローチャートの処理が終了する。
切換処理部152Bは、乱数xが「ライフ」~「ライフ×2-α2」までの範囲にはないと判定した場合、乱数xが「ライフ×2」~「ライフ×3-α3」までの範囲にあるか否かを判定する(ステップS62)。切換処理部152Bは、乱数xが「ライフ×2」~「ライフ×3-α3」までの範囲にはないと判定した場合、その処理をステップS50に戻す。一方、切換処理部152Bは、乱数xが「ライフ×2」~「ライフ×3-α3」までの範囲にあると判定した場合、無線基地局70との通信に用いる周波数帯として、周波数帯(3)を選択する(ステップS64)。これによって、本フローチャートの処理が終了する。
次に、図10および図11を参照して、切換処理部152Bが無線基地局70との通信に用いる周波数帯を選択する場合の動作について説明する。図10は、周波数帯nを用いた無線基地局70との通信において通信エラーが発生していない場合の動作を説明するための図である。図11は、周波数帯(1)を用いた無線基地局70との通信において通信エラーが発生している場合の動作を説明するための図である。
図10に示す例では、周波数帯(1)、周波数帯(2)、および周波数帯(3)のそれぞれに対してライフが設定されている。ライフは、周波数帯nごとに設定された数値範囲の広さを示す値である。ライフは、複数の周波数帯nに対して共通の値であってもよいし、周波数帯nごとに異なる値であってもよい。切換処理部152Bは、いずれかの周波数帯nに設定された数値範囲から、周波数帯nごとのエラーカウントにより示される広さを持つ数値範囲を除外した数値範囲と乱数xとが一致した場合、数値範囲が一致した周波数帯nを無線基地局70との通信に用いる周波数帯nとして選択する。すなわち、切換処理部152Bは、エラーカウントの値が比較的小さい周波数帯を、エラーカウントの値が比較的大きい周波数帯に比して、無線基地局70との通信に用いる周波数帯として選択する確率を高めている。
図11に示す例では、切換処理部152Bは、通信エラーが発生した周波数帯(1)以外の周波数帯nに設定された数値範囲から、周波数帯nのエラーカウントにより示される広さを持つ数値範囲を除外した数値範囲と乱数xとが一致した場合、数値範囲が一致した周波数帯nを無線基地局70との通信に用いる周波数帯nとして選択する。すなわち、切換処理部152Bは、通信エラーが発生した周波数帯(1)を、無線基地局70との通信に用いる周波数帯として選択することを禁止している。
上記説明した実施形態に係る制御装置150によれば、冗長性を継続的に維持するための切換制御を行うことができる。例えば、複数の周波数帯で無線通信を行う場合に、各周波数帯において通信装置110,112,114が通信する無線基地局70を切り換えるタイミングを共通した場合、ドローン100と無線基地局70との通信が一時的に途絶する場合がある。したがって、実施形態に係る制御装置150によれば、例えば、無線基地局70の切り換えを開始してから第1所定時間が経過するまでの間、通信装置110,112,114に、無線基地局70を切り換えた周波数帯以外の周波数帯で無線基地局70を切り換えさせることを抑制して、通信装置110,112,114が通信する無線基地局70を切り換えるタイミングを周波数帯ごとに異ならせる。これにより、冗長性を継続的に維持するための切換制御を行うことができる。
また、実施形態に係る制御装置150によれば、無線基地局70の切り換えを完了した後、通信装置110,112,114に、切り換えた後の無線基地局70から別の無線基地局に切り換えさせることを一時的に抑制するため、無線基地局70の切り換えを安定して行うことができる。
以上、本発明を実施するための形態について実施形態を用いて説明したが、本発明はこうした実施形態に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々の変形及び置換を加えることができる。
1…管制システム、10…管理装置、70…無線基地局、100…ドローン、110…第1通信装置、112…第2通信装置、114…第3通信装置、120…GNSS受信機、122…センサ群、130…カメラ、140…バッテリ、150…制御装置、152…通信制御部、152A…システム状態判定部、152B…切換処理部、154…飛行制御部、156…撮像制御部、170…回転翼、172…モータ、174…ESC。
Claims (6)
- 二以上の周波数帯で無線基地局と通信する通信装置を備える飛行体に搭載される制御装置であって、
前記無線基地局との間における通信エラーの発生回数を周波数帯ごとにカウントする通信エラー検知部と、
周波数帯ごとの通信エラーのカウント値が所定値以上となった場合、前記カウント値が前記所定値以上となった周波数帯で前記通信装置が通信する無線基地局を切り換える切換処理部を備え、
前記切換処理部は、前記通信装置が通信する無線基地局を切り換えるタイミングを周波数帯ごとに異ならせる、
制御装置。 - 前記切換処理部は、前記無線基地局の切り換えを開始してから第1所定時間が経過するまでの間、前記通信装置に、前記無線基地局を切り換えた周波数帯以外の周波数帯で無線基地局を切り換えさせることを抑制する、
請求項1記載の制御装置。 - 前記第1所定時間は、前記通信装置が前記無線基地局を切り換えるための所要時間よりも長い時間である、
請求項2記載の制御装置。 - 前記切換処理部は、前記無線基地局の切り換えを完了した後、前記通信装置に、切り換えた後の前記無線基地局から別の前記無線基地局に切り換えさせることを一時的に抑制する、
請求項1から3のうちいずれか1項記載の制御装置。 - 二以上の周波数帯で無線基地局と通信する通信装置を備える飛行体に搭載される制御装置が、
前記無線基地局との間における通信エラーの発生回数を周波数帯ごとにカウントし、
周波数帯ごとの通信エラーのカウント値が所定値以上となった場合、前記カウント値が前記所定値以上となった周波数帯で通信する無線基地局を切り換え、
前記通信装置が通信する無線基地局を切り換えるタイミングを周波数帯ごとに異ならせる、
制御方法。 - 二以上の周波数帯で無線基地局と通信する通信装置を備える飛行体に搭載される制御装置に、
前記無線基地局との間における通信エラーの発生回数を周波数帯ごとにカウントする処理と、
周波数帯ごとの通信エラーのカウント値が所定値以上となった場合、前記カウント値が前記所定値以上となった周波数帯で通信する無線基地局を切り換える処理と、
前記通信装置が通信する無線基地局を切り換えるタイミングを周波数帯ごとに異ならせる処理と、
を実行させるプログラム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019156833 | 2019-08-29 | ||
| JP2019156833 | 2019-08-29 | ||
| PCT/JP2020/025602 WO2021039097A1 (ja) | 2019-08-29 | 2020-06-30 | 制御装置、制御方法、およびプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2021039097A1 JPWO2021039097A1 (ja) | 2021-03-04 |
| JP7126029B2 true JP7126029B2 (ja) | 2022-08-25 |
Family
ID=74683653
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021542579A Active JP7126029B2 (ja) | 2019-08-29 | 2020-06-30 | 制御装置、制御方法、およびプログラム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7126029B2 (ja) |
| WO (1) | WO2021039097A1 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004072459A (ja) | 2002-08-07 | 2004-03-04 | Kyocera Corp | 無線通信システム |
| WO2016007295A1 (en) | 2014-07-11 | 2016-01-14 | Qualcomm Incorporated | Group handover management in air-to-ground wireless communication |
| WO2017147818A1 (en) | 2016-03-02 | 2017-09-08 | Honeywell International Inc. | Enhanced vhf link communications method |
-
2020
- 2020-06-30 JP JP2021542579A patent/JP7126029B2/ja active Active
- 2020-06-30 WO PCT/JP2020/025602 patent/WO2021039097A1/ja active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004072459A (ja) | 2002-08-07 | 2004-03-04 | Kyocera Corp | 無線通信システム |
| WO2016007295A1 (en) | 2014-07-11 | 2016-01-14 | Qualcomm Incorporated | Group handover management in air-to-ground wireless communication |
| WO2017147818A1 (en) | 2016-03-02 | 2017-09-08 | Honeywell International Inc. | Enhanced vhf link communications method |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2021039097A1 (ja) | 2021-03-04 |
| WO2021039097A1 (ja) | 2021-03-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11271637B2 (en) | Network capacity management | |
| US10351240B1 (en) | Methods and systems for cooperative operation and configuration of aerially-mobile devices | |
| EP2997768B1 (en) | Adaptive communication mode switching | |
| EP4363941A1 (en) | Unmanned aerial vehicle (uav) swarm control | |
| CN109792484B (zh) | 无人自主飞行器中的图像处理 | |
| JP2018095049A (ja) | 複数の無人航空機を有する通信システム | |
| TW201838360A (zh) | 航空機器人飛行器天線切換 | |
| JP2012112738A (ja) | 追尾装置及び追尾方法 | |
| JP6562868B2 (ja) | 無線通信システム、通信管理装置、通信管理方法、及びコンピュータプログラム | |
| US12030633B2 (en) | Mobile device alternate network channels | |
| KR20200023309A (ko) | 촬상 디바이스, 카메라 장착 드론, 모드 제어 방법, 및 프로그램 | |
| CN109983708A (zh) | 用于跳频集选择的方法和系统 | |
| JP7126029B2 (ja) | 制御装置、制御方法、およびプログラム | |
| CN110494905B (zh) | 装置、系统、方法和记录程序的记录介质 | |
| WO2020172873A1 (zh) | 无人机的通信方法及无人机 | |
| JP7186885B2 (ja) | 制御装置、制御方法、およびプログラム | |
| JP6452664B2 (ja) | 飛行装置及び通信制御方法 | |
| JP6495161B2 (ja) | 通信中継装置 | |
| KR102258731B1 (ko) | 무인 비행체의 편대 비행 시퀀스 제어 시스템 및 방법 | |
| JP7031733B2 (ja) | 遠隔制御装置、遠隔制御システム、遠隔制御方法、および遠隔制御プログラム | |
| JP7195448B2 (ja) | 制御装置、制御方法、およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211005 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220802 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220815 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7126029 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |