JP7117980B2 - agricultural machine - Google Patents
agricultural machine Download PDFInfo
- Publication number
- JP7117980B2 JP7117980B2 JP2018220467A JP2018220467A JP7117980B2 JP 7117980 B2 JP7117980 B2 JP 7117980B2 JP 2018220467 A JP2018220467 A JP 2018220467A JP 2018220467 A JP2018220467 A JP 2018220467A JP 7117980 B2 JP7117980 B2 JP 7117980B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle speed
- state
- change
- combine
- time
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000013459 approach Methods 0.000 claims description 34
- 235000013339 cereals Nutrition 0.000 description 32
- 238000003306 harvesting Methods 0.000 description 20
- 230000002093 peripheral effect Effects 0.000 description 20
- 238000007599 discharging Methods 0.000 description 7
- 230000005540 biological transmission Effects 0.000 description 6
- 230000002123 temporal effect Effects 0.000 description 6
- 230000002706 hydrostatic effect Effects 0.000 description 5
- 230000007704 transition Effects 0.000 description 4
- 230000007935 neutral effect Effects 0.000 description 3
- 241001124569 Lycaenidae Species 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 240000007594 Oryza sativa Species 0.000 description 1
- 235000007164 Oryza sativa Nutrition 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 235000009566 rice Nutrition 0.000 description 1
- 238000009966 trimming Methods 0.000 description 1
Images









Landscapes
- Guiding Agricultural Machines (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
本発明は、自動走行可能な農作業機に関する。 TECHNICAL FIELD The present invention relates to an agricultural work machine capable of automatically traveling.
上記のような農作業機として、例えば、特許文献1に記載のものが既に知られている。この農作業機(特許文献1では「コンバイン」)を利用した収穫作業において、オペレータは、収穫作業の最初にコンバインを手動で操作し、圃場内の外周部分を一周するように刈取走行を行う。
As an agricultural working machine as described above, for example, one described in
この外周部分での走行において、農作業機の走行すべき方位が記録される。そして、記録された方位に基づく自動走行によって、圃場における未刈領域での刈取走行が行われる。 The direction in which the agricultural implement should travel is recorded while traveling in this outer peripheral portion. Then, automatic traveling based on the recorded orientation is performed to reap and travel in an uncut area in the field.
特許文献1には、自動走行中の目標車速を設定することについて詳述されていない。ここで、特許文献1に記載の農作業機において、自動走行中における機体の状態毎に個別の目標車速を設定可能な車速設定部を設けることが考えられる。
この場合、車速設定部により設定された目標車速に基づいて車速が制御されるように構成すれば、機体の状態の変化時に、変化後の機体の状態に対応する目標車速に車速が制御されることとなる。 In this case, if the vehicle speed is controlled based on the target vehicle speed set by the vehicle speed setting unit, the vehicle speed is controlled to the target vehicle speed corresponding to the state of the aircraft after the change when the state of the aircraft changes. It will happen.
しかしながら、機体の状態が変化する際、変化前の機体の状態に対応する目標車速と、変化後の機体の状態に対応する目標車速と、が比較的大きく異なる場合、車速が急変しがちである。これにより、農作業機に搭乗しているオペレータや農作業機の外部の監視者に不安感を与えてしまう事態が想定される。 However, when the state of the aircraft changes, if the target vehicle speed corresponding to the state of the aircraft before the change and the target vehicle speed corresponding to the state of the aircraft after the change differ relatively greatly, the vehicle speed tends to change suddenly. . As a result, it is assumed that an operator on board the agricultural working machine and an observer outside the agricultural working machine may feel uneasy.
本発明の目的は、農作業機に搭乗しているオペレータや農作業機の外部の監視者に不安感を与えることを回避できる農作業機を提供することである。 SUMMARY OF THE INVENTION An object of the present invention is to provide an agricultural work machine that can avoid giving an uneasy feeling to an operator on board the agricultural work machine and an observer outside the agricultural work machine.
本発明の特徴は、自動走行可能な農作業機であって、自動走行中の機体の状態毎に個別の目標車速を設定可能な車速設定部と、前記車速設定部により設定された目標車速に基づいて車速を制御する車速制御部と、を備え、前記車速制御部は、自動走行中における機体の状態の変化時に、変化後の機体の状態に対応する目標車速である変化後車速に車速を漸近させ、未作業領域を走行する状態である第1状態から、既作業領域を走行する状態である第2状態へ、機体の状態が変化する場合、前記車速制御部は、前記第1状態から前記第2状態への変化後に、前記第2状態に対応する目標車速に車速を漸近させ始めるように制御し、前記第2状態から前記第1状態へ機体の状態が変化する場合、前記車速制御部は、前記第2状態から前記第1状態への変化前に、前記第1状態に対応する目標車速に車速を漸近させ始め、且つ、前記第1状態へ変化するまでに、前記第1状態に対応する目標車速に達するように制御することにある。 A feature of the present invention is an agricultural work machine capable of automatically traveling, comprising a vehicle speed setting unit capable of setting an individual target vehicle speed for each state of the machine body during automatic traveling, and a target vehicle speed set by the vehicle speed setting unit. a vehicle speed control unit for controlling a vehicle speed by means of a vehicle speed control unit, wherein the vehicle speed control unit asymptotically approaches the vehicle speed after the change, which is a target vehicle speed corresponding to the state of the aircraft after the change, when the state of the aircraft changes during automatic driving. and when the state of the machine body changes from the first state in which the vehicle travels in an unworked area to the second state in which it travels in an already-worked area, the vehicle speed control unit changes from the first state to the After the change to the second state, the vehicle speed control unit controls the vehicle speed to start asymptotically approaching the target vehicle speed corresponding to the second state, and when the state of the airframe changes from the second state to the first state, the vehicle speed control unit starts to make the vehicle speed asymptotically approach the target vehicle speed corresponding to the first state before the change from the second state to the first state, and before the change to the first state, the vehicle speed changes to the first state; To control to reach a corresponding target vehicle speed .
本発明であれば、機体の状態の変化時に、車速は変化後車速に漸近する。従って、機体の状態が変化する際、変化前の機体の状態に対応する目標車速と、変化後の機体の状態に対応する目標車速と、が比較的大きく異なる場合であっても、車速が急変することはない。 According to the present invention, when the state of the aircraft changes, the vehicle speed asymptotically approaches the post-change vehicle speed. Therefore, when the state of the aircraft changes, even if the target vehicle speed corresponding to the state of the aircraft before the change and the target vehicle speed corresponding to the state of the aircraft after the change differ relatively greatly, the vehicle speed suddenly changes. never do.
これにより、農作業機に搭乗しているオペレータや農作業機の外部の監視者に不安感を与えることを回避できる農作業機を実現できる。 As a result, it is possible to realize an agricultural working machine that can avoid giving an uneasy feeling to an operator on board the agricultural working machine and an observer outside the agricultural working machine.
この構成によれば、機体の状態の変化前に、変化後車速に車速を漸近させ始めることにより、機体の状態が変化するまでに車速が変化後車速に達するように車速を制御できる。また、機体の状態の変化後に、変化後車速に車速を漸近させ始めることにより、機体の状態が変化する時点まで車速が維持されるように車速を制御できる。 According to this configuration, the vehicle speed can be controlled to reach the post-change vehicle speed by the time the state of the fuselage changes by starting to asymptotically approach the vehicle speed to the post-change vehicle speed before the fuselage state changes. In addition, after the state of the aircraft changes, the vehicle speed can be controlled so that the vehicle speed is maintained until the time when the state of the aircraft changes by starting to asymptotically approach the vehicle speed after the change.
従って、上記の構成によれば、機体の状態が変化するまでに車速が変化後車速に達するような車速制御と、機体の状態が変化する時点まで車速が維持されるような車速制御と、を状況に応じて使い分けることが可能となる。 Therefore, according to the above configuration, vehicle speed control is performed so that the vehicle speed reaches the post-change vehicle speed before the state of the aircraft changes, and vehicle speed control is performed so that the vehicle speed is maintained until the state of the aircraft changes. It is possible to use them properly according to the situation.
この構成によれば、農作業機が未作業領域の外部へ出る場合には、農作業機が未作業領域の外部へ出る時点まで、車速が第1状態に対応する目標車速に維持される。また、農作業機が未作業領域へ進入する場合には、農作業機が未作業領域へ進入するまでに車速が第1状態に対応する目標車速に達するように車速を制御することができる。 According to this configuration, when the agricultural implement leaves the unworked area, the vehicle speed is maintained at the target vehicle speed corresponding to the first state until the agricultural implement leaves the unworked area. Further, when the agricultural implement enters the unworked area, the vehicle speed can be controlled so that the vehicle speed reaches the target vehicle speed corresponding to the first state by the time the agricultural implement enters the unworked area.
これにより、農作業機が未作業領域を走行しているときの車速は、常に、第1状態に対応する目標車速となる。従って、未作業領域における作業速度を均一にすることが可能となる。 As a result, the vehicle speed when the agricultural implement is traveling in the unworked area is always the target vehicle speed corresponding to the first state. Therefore, it is possible to uniform the working speed in the unworked area.
さらに、本発明において、車速が前記変化後車速よりも低い場合、前記車速制御部は、車速を第1変化率で変化させることにより前記変化後車速に車速を漸近させ、車速が前記変化後車速よりも高い場合、前記車速制御部は、車速を前記第1変化率とは異なる第2変化率で変化させることにより前記変化後車速に車速を漸近させると好適である。 Further, in the present invention, when the vehicle speed is lower than the post-change vehicle speed, the vehicle speed control unit changes the vehicle speed at a first rate of change to cause the vehicle speed to asymptotically approach the post-change vehicle speed. , the vehicle speed control unit preferably causes the vehicle speed to asymptotically approach the post-change vehicle speed by changing the vehicle speed at a second rate of change different from the first rate of change.
この構成によれば、機体の状態の変化に伴って増速する場合の車速変化率と、機体の状態の変化に伴って減速する場合の車速変化率と、を異ならせることが可能となる。 According to this configuration, it is possible to differentiate the rate of change in vehicle speed when accelerating with changes in the state of the aircraft and the rate of change in vehicle speed when decelerating with changes in the state of the aircraft.
さらに、本発明において、前記車速制御部が前記変化後車速に車速を漸近させる際の車速変化率は、機体の状態の変化パターンによって異なると好適である。 Further, in the present invention, it is preferable that the rate of change in vehicle speed when the vehicle speed control unit causes the vehicle speed to asymptotically approach the post-change vehicle speed varies depending on the change pattern of the state of the aircraft.
この構成によれば、機体の状態の変化パターンに応じて適切な車速変化率で車速を変化させることが可能な農作業機を実現できる。 According to this configuration, it is possible to realize an agricultural implement capable of changing the vehicle speed at an appropriate vehicle speed change rate according to the change pattern of the state of the machine body.
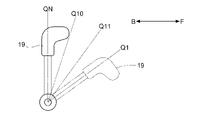
本発明を実施するための形態について、図面に基づき説明する。尚、以下の説明においては、特に断りがない限り、図1及び図6に示す矢印Fの方向を「前」、矢印Bの方向を「後」とする。また、図1に示す矢印Uの方向を「上」、矢印Dの方向を「下」とする。 A mode for carrying out the present invention will be described based on the drawings. In the following description, the direction of arrow F shown in FIGS. 1 and 6 is defined as "front" and the direction of arrow B is defined as "rear" unless otherwise specified. The direction of arrow U shown in FIG. 1 is defined as "up", and the direction of arrow D is defined as "down".
〔コンバインの全体構成〕
図1に示すように、普通型のコンバイン1(本発明に係る「農作業機」に相当)は、クローラ式の走行装置11、運転部12、脱穀装置13、穀粒タンク14、収穫装置H、搬送装置16、穀粒排出装置18、衛星測位モジュール80、エンジンEを備えている。
[Overall configuration of combine harvester]
As shown in FIG. 1, a normal combine harvester 1 (corresponding to the "agricultural machine" according to the present invention) includes a crawler
走行装置11は、コンバイン1における下部に備えられている。また、走行装置11は、エンジンEからの動力によって駆動する。そして、コンバイン1は、走行装置11によって自走可能である。
The
また、運転部12、脱穀装置13、穀粒タンク14は、走行装置11の上側に備えられている。運転部12には、コンバイン1の作業を監視するオペレータが搭乗可能である。尚、オペレータは、コンバイン1の機外からコンバイン1の作業を監視していても良い。
The
穀粒排出装置18は、穀粒タンク14の上側に設けられている。また、衛星測位モジュール80は、運転部12の上面に取り付けられている。
The
収穫装置Hは、コンバイン1における前部に備えられている。そして、搬送装置16は、収穫装置Hの後側に設けられている。また、収穫装置Hは、刈取装置15及びリール17を有している。
A harvesting device H is provided at the front of the
刈取装置15は、圃場の植立穀稈を刈り取る。また、リール17は、回転駆動しながら収穫対象の植立穀稈を掻き込む。この構成により、収穫装置Hは、圃場の穀物を収穫する。そして、コンバイン1は、刈取装置15によって圃場の植立穀稈を刈り取りながら走行装置11によって走行する刈取走行が可能である。
The reaping
刈取装置15により刈り取られた刈取穀稈は、搬送装置16によって脱穀装置13へ搬送される。脱穀装置13において、刈取穀稈は脱穀処理される。脱穀処理により得られた穀粒は、穀粒タンク14に貯留される。穀粒タンク14に貯留された穀粒は、必要に応じて、穀粒排出装置18によって機外に排出される。
The harvested culms harvested by the
また、図1に示すように、運転部12には、通信端末4が配置されている。通信端末4は、種々の情報を表示可能に構成されている。本実施形態において、通信端末4は、運転部12に固定されている。しかしながら、本発明はこれに限定されず、通信端末4は、運転部12に対して着脱可能に構成されていても良いし、通信端末4は、コンバイン1の機外に位置していても良い。
Further, as shown in FIG. 1 , the
ここで、コンバイン1は、図2に示すように圃場における外周側の領域で穀物を収穫しながら周回走行を行った後、図3及び図4に示すように圃場における内側の領域で刈取走行を行うことにより、圃場の穀物を収穫するように構成されている。
Here, as shown in FIG. 2, the
本実施形態においては、図2に示す周回走行は手動走行により行われる。また、図3及び図4に示す内側の領域での刈取走行は、自動走行により行われる。 In the present embodiment, the circular travel shown in FIG. 2 is performed manually. In addition, reaping travel in the inner region shown in FIGS. 3 and 4 is performed by automatic travel.
尚、本発明はこれに限定されず、図2に示す周回走行は自動走行により行われても良い。 Note that the present invention is not limited to this, and the circuit running shown in FIG. 2 may be performed by automatic running.
また、図1に示すように、運転部12には、主変速レバー19が設けられている。主変速レバー19は、人為操作される。コンバイン1が手動走行しているとき、オペレータが主変速レバー19を操作すると、コンバイン1の車速が変化する。即ち、コンバイン1が手動運転しているとき、オペレータは、主変速レバー19を操作することにより、コンバイン1の車速を変更することができる。
Moreover, as shown in FIG. The
尚、オペレータは、通信端末4を操作することにより、エンジンEの回転速度を変更することができる。
The operator can change the rotation speed of the engine E by operating the
作物の種類によって、脱粒しやすさや倒伏しやすさ等の生育特性は異なる。従って、作物の種類によって、適切な作業速度は異なる。オペレータが通信端末4を操作し、エンジンEの回転速度を適切な回転速度に設定すれば、作物の種類に適した作業速度で作業を行うことができる。
Growth characteristics such as ease of shedding and lodging are different depending on the type of crop. Therefore, the appropriate working speed differs depending on the type of crop. If the operator operates the
〔制御部に関する構成〕
図5に示すように、コンバイン1は、静油圧式無段変速機3と、制御部20と、を備えている。また、静油圧式無段変速機3は、油圧ポンプ31及び油圧モータ32を有している。
[Structure related to control unit]
As shown in FIG. 5 , the
エンジンEから出力された動力は、静油圧式無段変速機3に入力される。そして、静油圧式無段変速機3において、動力は油圧ポンプ31から油圧モータ32へ伝達される。このとき、油圧ポンプ31と油圧モータ32との間で、動力は変速される。そして、変速された動力は走行装置11へ伝達される。これにより、走行装置11が駆動する。
Power output from the engine E is input to the hydrostatic continuously variable transmission 3 . Power is transmitted from the
また、制御部20は、自車位置算出部21、領域算出部22、経路算出部23、走行制御部24を備えている。
The
図1に示すように、衛星測位モジュール80は、GPS(グローバル・ポジショニング・システム)で用いられる人工衛星GSからのGPS信号を受信する。そして、図5に示すように、衛星測位モジュール80は、受信したGPS信号に基づいて、コンバイン1の自車位置を示す測位データを自車位置算出部21へ送る。
As shown in FIG. 1, the
自車位置算出部21は、衛星測位モジュール80により出力された測位データに基づいて、コンバイン1の位置座標を経時的に算出する。算出されたコンバイン1の経時的な位置座標は、領域算出部22及び走行制御部24へ送られる。
The own vehicle
領域算出部22は、自車位置算出部21から受け取ったコンバイン1の経時的な位置座標に基づいて、図3に示すように、外周領域SA及び作業対象領域CAを算出する。
Based on the temporal position coordinates of the
より具体的には、領域算出部22は、自車位置算出部21から受け取ったコンバイン1の経時的な位置座標に基づいて、圃場の外周側における周回走行でのコンバイン1の走行軌跡を算出する。そして、領域算出部22は、算出されたコンバイン1の走行軌跡に基づいて、コンバイン1が穀物を収穫しながら周回走行した圃場の外周側の領域を外周領域SAとして算出する。また、領域算出部22は、算出された外周領域SAよりも圃場内側の領域を、作業対象領域CAとして算出する。
More specifically, the
例えば、図2においては、圃場の外周側における周回走行のためのコンバイン1の走行経路が矢印で示されている。図2に示す例では、コンバイン1は、3周の周回走行を行う。そして、この走行経路に沿った刈取走行が完了すると、圃場は、図3に示す状態となる。
For example, in FIG. 2, arrows indicate the traveling route of the
図3に示すように、領域算出部22は、コンバイン1が穀物を収穫しながら周回走行した圃場の外周側の領域を外周領域SAとして算出する。また、領域算出部22は、算出された外周領域SAよりも圃場内側の領域を、作業対象領域CAとして算出する。
As shown in FIG. 3 , the
さらに、領域算出部22は、自車位置算出部21から受け取ったコンバイン1の経時的な位置座標に基づいて、図4に示すように、作業対象領域CAにおける未刈部分CA1及び既刈部分CA2を算出する。
Furthermore, based on the temporal position coordinates of the
より具体的には、領域算出部22は、自車位置算出部21から受け取ったコンバイン1の経時的な位置座標に基づいて、作業対象領域CAにおける刈取走行でのコンバイン1の走行軌跡を算出する。そして、領域算出部22は、算出されたコンバイン1の走行軌跡に基づいて、コンバイン1が刈取走行した領域を既刈部分CA2として算出する。また、領域算出部22は、作業対象領域CAにおける既刈部分CA2以外の部分を、未刈部分CA1として算出する。
More specifically, the
そして、図5に示すように、領域算出部22による算出結果は、経路算出部23へ送られる。
Then, as shown in FIG. 5 , the calculation result by the
経路算出部23は、領域算出部22から受け取った算出結果に基づいて、図3及び図4に示すように、作業対象領域CAにおける刈取走行のための走行経路である刈取走行経路LIを算出する。尚、図3及び図4に示すように、本実施形態においては、刈取走行経路LIは、縦横方向に延びる複数のメッシュ線である。また、複数のメッシュ線は直線でなくても良く、湾曲していても良い。
Based on the calculation results received from the
図5に示すように、経路算出部23により算出された刈取走行経路LIは、走行制御部24へ送られる。
As shown in FIG. 5 , the reaping travel route LI calculated by the
走行制御部24は、走行装置11を制御可能に構成されている。そして、走行制御部24は、自車位置算出部21から受け取ったコンバイン1の位置座標と、経路算出部23から受け取った刈取走行経路LIと、に基づいて、コンバイン1の自動走行を制御する。より具体的には、走行制御部24は、図3及び図4に示すように、刈取走行経路LIに沿った自動走行によって刈取走行が行われるように、コンバイン1の走行を制御する。
The
また、経路算出部23は、領域算出部22から受け取った算出結果に基づいて、図3及び図4に示すように、外周領域SAにおける非刈取走行のための走行経路である離脱復帰経路LWを算出する。尚、図3及び図4に示すように、本実施形態においては、離脱復帰経路LWは、圃場の外形に沿う形状の線である。
Further, based on the calculation result received from the
図5に示すように、経路算出部23により算出された離脱復帰経路LWは、走行制御部24へ送られる。
As shown in FIG. 5 , the exit/return route LW calculated by the
走行制御部24は、自車位置算出部21から受け取ったコンバイン1の位置座標と、経路算出部23から受け取った離脱復帰経路LWと、に基づいて、コンバイン1の自動走行を制御する。より具体的には、走行制御部24は、図4に示すように、コンバイン1が刈取走行経路LIから離脱した場合に、離脱復帰経路LWに沿った自動走行によって非刈取走行が行われるように、コンバイン1の走行を制御する。
The
〔コンバインによる収穫作業の流れ〕
以下では、コンバイン1による収穫作業の例として、コンバイン1が、図2に示す圃場で収穫作業を行う場合の流れについて説明する。
[Flow of harvesting work using a combine]
Below, as an example of the harvesting work by the
最初に、オペレータは、コンバイン1を手動で操作し、図2に示すように、圃場内の外周部分において、圃場の境界線に沿って周回するように刈取走行を行う。図2に示す例では、コンバイン1は、3周の周回走行を行う。この周回走行が完了すると、圃場は、図3に示す状態となる。
First, the operator manually operates the
領域算出部22は、自車位置算出部21から受け取ったコンバイン1の経時的な位置座標に基づいて、図2に示す周回走行でのコンバイン1の走行軌跡を算出する。そして、図3に示すように、領域算出部22は、算出されたコンバイン1の走行軌跡に基づいて、コンバイン1が植立穀稈を刈り取りながら周回走行した圃場の外周側の領域を外周領域SAとして算出する。また、領域算出部22は、算出された外周領域SAよりも圃場内側の領域を、作業対象領域CAとして算出する。
Based on the temporal positional coordinates of the
次に、経路算出部23は、領域算出部22から受け取った算出結果に基づいて、図3に示すように、作業対象領域CAにおける刈取走行経路LIを設定する。また、このとき、経路算出部23は、領域算出部22から受け取った算出結果に基づいて、外周領域SAにおける離脱復帰経路LWを算出する。
Next, based on the calculation result received from the
そして、オペレータが自動走行開始ボタン(図示せず)を押すことにより、図3に示すように、刈取走行経路LIに沿った自動走行が開始される。このとき、走行制御部24は、刈取走行経路LIに沿った自動走行によって刈取走行が行われるように、コンバイン1の走行を制御する。
When the operator presses an automatic travel start button (not shown), automatic travel along the reaping travel route LI is started as shown in FIG. At this time, the
作業対象領域CAにおける自動走行が開始されると、図3に示すように、コンバイン1は、作業対象領域CAにおける外周部分において、作業対象領域CAの外形に沿って周回するように刈取走行を行う。図3に示す例では、コンバイン1は、1周の周回走行を行う。このとき、コンバイン1は、刈取走行経路LIに沿った走行と、αターンによる方向転換と、を繰り返す。
When the automatic traveling in the work area CA is started, as shown in FIG. 3, the
この周回走行が完了すると、圃場は、図4に示す状態となる。そして、コンバイン1は、刈取走行経路LIに沿った走行と、Uターンによる旋回と、を繰り返すことにより、作業対象領域CAの全体を網羅するように刈取走行を行う。
When this round trip is completed, the field will be in the state shown in FIG. Then, the
ここで、コンバイン1により刈取走行が行われている間、上述の通り、刈取装置15により刈り取られた刈取穀稈は、搬送装置16によって脱穀装置13へ搬送される。そして、脱穀装置13において、刈取穀稈は脱穀処理される。
Here, while the
尚、本実施形態においては、図2から図4に示すように、圃場外に運搬車CVが駐車している。そして、外周領域SAにおいて、運搬車CVの近傍位置には、停車位置PPが設定されている。図3及び図4に示すように、停車位置PPは、離脱復帰経路LWに重複する位置に設定されている。 In this embodiment, as shown in FIGS. 2 to 4, the transport vehicle CV is parked outside the field. A stop position PP is set in the vicinity of the transport vehicle CV in the outer peripheral area SA. As shown in FIGS. 3 and 4, the stop position PP is set at a position that overlaps the exit/return route LW.
運搬車CVは、コンバイン1が穀粒排出装置18から排出した穀粒を収集し、運搬することができる。穀粒排出の際、コンバイン1は停車位置PPに停車し、穀粒排出装置18によって穀粒を運搬車CVへ排出する。
The transport vehicle CV can collect and transport the grains discharged from the
コンバイン1が刈取走行を続け、穀粒タンク14内の穀粒の量が所定量に達すると、図4に示すように、走行制御部24は、刈取走行経路LIから離脱するようにコンバイン1の走行を制御する。
When the
コンバイン1が刈取走行経路LIから離脱した後、走行制御部24は、離脱復帰経路LWへ向かって走行するようにコンバイン1を制御する。そして、コンバイン1が離脱復帰経路LWの近傍に到達すると、走行制御部24は、離脱復帰経路LWに沿った自動走行によって非刈取走行が行われるように、コンバイン1の走行を制御する。
After the
そして、コンバイン1は停車位置PPに停車し、穀粒排出装置18によって穀粒を運搬車CVへ排出する。
Then, the
〔車速制御に関する構成〕
図5に示すように、走行制御部24は、車速設定部24a及び車速制御部24bを有している。車速設定部24aは、自動走行中における機体の状態毎に個別の目標車速を設定可能である。
[Configuration related to vehicle speed control]
As shown in FIG. 5, the
ここで、「機体の状態」とは、例えば、作業前進状態、旋回状態、後進状態、非作業状態である。本実施形態において、作業前進状態とは、コンバイン1が作業をしながら直前進している状態である。より具体的には、作業前進状態とは、コンバイン1が圃場の植立穀稈を刈り取りながら直前進している状態である。
Here, the "state of the aircraft" is, for example, a working forward state, a turning state, a backward moving state, and a non-working state. In this embodiment, the working forward state is a state in which the
また、本実施形態において、旋回状態とは、コンバイン1が前側に旋回走行している状態である。
Further, in the present embodiment, the turning state is a state in which the
また、本実施形態において、後進状態とは、コンバイン1が後側に走行している状態である。
Moreover, in this embodiment, the reverse state is a state in which the
また、本実施形態において、非作業状態とは、コンバイン1が作業をせずに直前進している状態である。より具体的には、非作業状態とは、コンバイン1が刈取作業を行わずに直前進している状態である。例えば、コンバイン1が穀粒排出場所へ向かうために直前進している状態、及び、コンバイン1が燃料補給場所へ向かうために直前進している状態は、何れも、非作業状態である。
Moreover, in this embodiment, a non-working state is a state in which the
尚、本発明はこれに限定されない。例えば、コンバイン1が作業をしながら前側に旋回走行している状態は、旋回状態に含まれず、作業前進状態に含まれても良い。また、コンバイン1が後側に旋回走行している状態は、後進状態に含まれず、旋回状態に含まれても良い。また、コンバイン1が作業をせずに前側に旋回走行している状態は、旋回状態に含まれず、非作業状態に含まれても良い。また、コンバイン1が作業をせずに後側に走行している状態は、後進状態に含まれず、非作業状態に含まれても良い。
However, the present invention is not limited to this. For example, the state in which the
コンバイン1の自動走行中に、オペレータが主変速レバー19を操作すると、図5に示すように、操作に応じた信号が主変速レバー19から車速設定部24aへ送られる。そして、車速設定部24aは、この信号に基づいて、作業前進車速を設定する。尚、作業前進車速とは、自動走行中における作業前進状態の目標車速である。
When the operator operates the
即ち、車速設定部24aは、自動走行中における作業前進状態の目標車速である作業前進車速を設定可能である。また、自動走行中において、車速設定部24aは、主変速レバー19の人為操作に応じて作業前進車速を設定する。
That is, the vehicle
詳述すると、図6に示すように、主変速レバー19は、中立位置QNから前方限界位置Q1に亘って、無段階に揺動操作可能に構成されている。そして、図7に示すように、車速設定部24aは、主変速レバー19の操作位置に応じて、作業前進車速を無段階に設定する。
More specifically, as shown in FIG. 6, the
図7に示すように、主変速レバー19の操作位置が中立位置QNである場合、車速設定部24aにより設定される作業前進車速は0(ゼロ)である。また、主変速レバー19の操作位置が第1操作位置Q10である場合、車速設定部24aにより設定される作業前進車速はV10である。また、主変速レバー19の操作位置が第2操作位置Q11である場合、車速設定部24aにより設定される作業前進車速はV11である。また、主変速レバー19の操作位置が前方限界位置Q1である場合、車速設定部24aにより設定される作業前進車速はV1である。
As shown in FIG. 7, when the operating position of the
図7に示すように、主変速レバー19の操作位置が前側であるほど、車速設定部24aにより設定される作業前進車速は高くなる。
As shown in FIG. 7, the forward operation vehicle speed set by the vehicle
尚、図6に示すように、第1操作位置Q10は、中立位置QNよりも前側の操作位置である。また、第2操作位置Q11は、第1操作位置Q10よりも前側の操作位置である。 Incidentally, as shown in FIG. 6, the first operation position Q10 is an operation position on the front side of the neutral position QN. Also, the second operating position Q11 is an operating position on the front side of the first operating position Q10.
また、図7に示すように、V10は、V11より低い。また、V11は、V1より低い。 Also, as shown in FIG. 7, V10 is lower than V11. Also, V11 is lower than V1.
また、図8に示すように、通信端末4は、人為操作されるタッチパネル4aを有している。タッチパネル4aは、図8に示す目標車速設定画面を表示可能である。
Further, as shown in FIG. 8, the
目標車速設定画面では、旋回設定部5、後進設定部6、非作業設定部7が表示される。
旋回設定部5は、第1左ボタンL1及び第1右ボタンR1を含んでいる。後進設定部6は、第2左ボタンL2及び第2右ボタンR2を含んでいる。非作業設定部7は、第3左ボタンL3及び第3右ボタンR3を含んでいる。
On the target vehicle speed setting screen, a
The
オペレータが第1左ボタンL1または第1右ボタンR1を押すことにより、旋回設定部5は、第1左ボタンL1が押された状態と、第1右ボタンR1が押された状態と、の間で2段階に操作される。同様に、後進設定部6及び非作業設定部7も、それぞれ、2段階に操作される。
When the operator presses the first left button L1 or the first right button R1, the
このように、目標車速設定画面が表示されているとき、通信端末4におけるタッチパネル4aは、複数段階に操作可能である。
Thus, when the target vehicle speed setting screen is displayed, the
そして、コンバイン1の停車中に、オペレータがタッチパネル4aを操作すると、図5に示すように、操作に応じた信号が、通信端末4から車速設定部24aへ送られる。そして、車速設定部24aは、この信号に基づいて、自動走行中における旋回状態、後進状態、非作業状態の目標車速を設定する。
When the operator operates the
即ち、車速設定部24aは、停車中における通信端末4の人為操作に応じて、自動走行中における作業前進状態以外の状態の目標車速を設定する。より具体的には、車速設定部24aは、停車中における通信端末4の人為操作に応じて、自動走行中における旋回状態、後進状態、非作業状態の目標車速を設定する。
That is, the vehicle
尚、以下では、自動走行中における旋回状態の目標車速を、「旋回車速」と称する。また、自動走行中における後進状態の目標車速を、「後進車速」と称する。また、自動走行中における非作業状態の目標車速を、「非作業車速」と称する。 Hereinafter, the target vehicle speed in the turning state during automatic driving is referred to as "turning vehicle speed". Further, the target vehicle speed in the reverse state during automatic driving is referred to as "reverse vehicle speed". Also, the target vehicle speed in the non-working state during automatic travel is referred to as "non-working vehicle speed".
図8に示すように、オペレータが第1左ボタンL1を押すと、車速設定部24aは、旋回車速をV2に設定する。このとき、目標車速設定画面では、V2が強調表示される。
As shown in FIG. 8, when the operator presses the first left button L1, the vehicle
また、オペレータが第1右ボタンR1を押すと、車速設定部24aは、旋回車速をV3に設定する。このとき、目標車速設定画面では、V3が強調表示される。
Further, when the operator presses the first right button R1, the vehicle
また、オペレータが第2左ボタンL2を押すと、車速設定部24aは、後進車速をV4に設定する。このとき、目標車速設定画面では、V4が強調表示される。
Further, when the operator presses the second left button L2, the vehicle
また、オペレータが第2右ボタンR2を押すと、車速設定部24aは、後進車速をV5に設定する。このとき、目標車速設定画面では、V5が強調表示される。
Further, when the operator presses the second right button R2, the vehicle
また、オペレータが第3左ボタンL3を押すと、車速設定部24aは、非作業車速をV6に設定する。このとき、目標車速設定画面では、V6が強調表示される。
Further, when the operator presses the third left button L3, the vehicle
また、オペレータが第3右ボタンR3を押すと、車速設定部24aは、非作業車速をV7に設定する。このとき、目標車速設定画面では、V7が強調表示される。
Further, when the operator presses the third right button R3, the vehicle
即ち、車速設定部24aは、第1左ボタンL1及び第1右ボタンR1の人為操作に応じて、旋回車速をV2とV3との間で切り替える。
That is, the vehicle
また、車速設定部24aは、第2左ボタンL2及び第2右ボタンR2の人為操作に応じて、後進車速をV4とV5との間で切り替える。
Further, the vehicle
また、車速設定部24aは、第3左ボタンL3及び第3右ボタンR3の人為操作に応じて、非作業車速をV6とV7との間で切り替える。
Further, the vehicle
このように、車速設定部24aは、自動走行中における作業前進状態以外の状態の目標車速を複数段階に設定する。
In this manner, the vehicle
尚、本実施形態において、V2はV3よりも低い。また、V4はV5よりも低い。また、V6はV7よりも低い。また、V2、V5、V6は互いに同一であり、何れも、V11より高く、V1より低い。また、V1、V3、V7は互いに同一である。 Note that V2 is lower than V3 in this embodiment. Also, V4 is lower than V5. Also, V6 is lower than V7. Also, V2, V5, and V6 are the same as each other, and all of them are higher than V11 and lower than V1. Also, V1, V3, and V7 are the same.
そして、図5に示すように、車速設定部24aにより設定された作業前進車速、旋回車速、後進車速、非作業車速は、車速制御部24bへ送られる。
Then, as shown in FIG. 5, the work forward vehicle speed, turning vehicle speed, reverse vehicle speed, and non-work vehicle speed set by the vehicle
ここで、静油圧式無段変速機3における油圧ポンプ31は、ポンプ斜板31aを有している。ポンプ斜板31aの斜板角に応じて、油圧ポンプ31と油圧モータ32との間の変速比が変化する。そして、油圧ポンプ31と油圧モータ32との間の変速比が変化すると、車速が変化することとなる。
Here, the
車速制御部24bは、車速設定部24aから受け取った作業前進車速、旋回車速、後進車速、非作業車速に基づいて、ポンプ斜板31aの斜板角を制御する。これにより、車速制御部24bは、車速を制御する。
The vehicle
即ち、車速制御部24bは、車速設定部24aにより設定された目標車速に基づいて、自動走行中における車速を制御する。
That is, the vehicle
以下では、車速制御部24bによる車速制御について、図3及び図4で示した自動走行を例に挙げ、図9及び図10を参照して説明する。
The vehicle speed control by the vehicle
図3に示す例では、コンバイン1は、圃場における位置P1から作業対象領域CAに進入する。このときの時刻を、時刻t1とする。そして、コンバイン1は、刈取走行経路LIに沿って刈取走行を行い、位置P2、P3、P4を通過し、位置P5に到達する。位置P5は、外周領域SAに位置している。
In the example shown in FIG. 3, the
そして、コンバイン1は、位置P5から後進走行を行い、位置P6、P7を通過し、位置P8に到達する。さらに、コンバイン1は、位置P8から前進走行を行い、位置P9から再び作業対象領域CAに進入する。
Then, the
図9では、図3に示す例における時刻t1以降のコンバイン1の車速の推移が示されている。尚、コンバイン1が位置P2、P3、P4、P5、P6、P7、P8、P9に到達したときの時刻を、それぞれ、時刻t2、t3、t4、t5、t6、t7、t8、t9とする。
FIG. 9 shows transition of the vehicle speed of the
即ち、図3及び図9に示す例において、コンバイン1は、時刻t1から時刻t4の間、及び、時刻t9以降は作業前進状態である。また、コンバイン1は、時刻t5から時刻t8の間は後進状態である。
That is, in the example shown in FIGS. 3 and 9, the
ここで、図3及び図9に示す例では、時刻t1において、主変速レバー19の操作位置は第1操作位置Q10であるものとする。そして、時刻t2において、オペレータが主変速レバー19を第2操作位置Q11へ操作する。その後、主変速レバー19の操作位置は第2操作位置Q11のままで維持される。また、図8に示すように、旋回車速、後進車速、非作業車速は、それぞれ、V2、V5、V7に設定されている。
Here, in the examples shown in FIGS. 3 and 9, it is assumed that the operating position of the
図9に示すように、時刻t1において、コンバイン1の車速はV10である。そして、時刻t2において、オペレータが主変速レバー19を第2操作位置Q11へ操作すると、作業前進車速はV10からV11に変化する。これと同時に、コンバイン1の車速は、車速制御部24bによる制御によって、V10からV11へ漸近し始める。このときの車速変化率は、第1車速変化率g1である。
As shown in FIG. 9, at time t1, the vehicle speed of the
時刻t3に、コンバイン1の車速はV11に達する。その後、時刻t4まで、コンバイン1の車速はV11のままで維持される。
At time t3, the vehicle speed of the
時刻t4に、コンバイン1は位置P4に到達する。位置P4は、作業対象領域CAの端に位置している。そのため、コンバイン1による刈取は、時刻t4で一旦終了する。そして、位置P5から後進するために、コンバイン1の車速は、車速制御部24bによる制御によって、V11から0(ゼロ)へ漸近し始める。このときの車速変化率は、第2車速変化率g2である。
At time t4, combine 1 reaches position P4. The position P4 is located at the end of the work area CA. Therefore, reaping by the
ここで、第2車速変化率g2は、第1車速変化率g1とは異なる値である。より具体的には、第2車速変化率g2は、第1車速変化率g1よりも大きい。 Here, the second vehicle speed change rate g2 is a value different from the first vehicle speed change rate g1. More specifically, the second vehicle speed change rate g2 is greater than the first vehicle speed change rate g1.
尚、本実施形態における車速変化率は、単位時間当たりの車速の変化量の絶対値である。即ち、本実施形態における車速変化率は、正の値である。 Note that the vehicle speed change rate in this embodiment is the absolute value of the amount of change in vehicle speed per unit time. That is, the vehicle speed change rate in this embodiment is a positive value.
時刻t5に、コンバイン1の車速は0(ゼロ)に達すると共に、コンバイン1は後進を開始する。コンバイン1の車速は、車速制御部24bによる制御によって、0(ゼロ)からV5へ漸近し始める。このときの車速変化率は、第1車速変化率g1である。
At time t5, the vehicle speed of the
時刻t6に、コンバイン1の車速はV5に達する。その後、時刻t7まで、コンバイン1の車速はV5のままで維持される。
At time t6, the vehicle speed of the
時刻t7に、コンバイン1は位置P7に到達する。そして、位置P8から前進するために、コンバイン1の車速は、車速制御部24bによる制御によって、V5から0(ゼロ)へ漸近し始める。このときの車速変化率は、第2車速変化率g2である。
At time t7, combine 1 reaches position P7. Then, in order to move forward from the position P8, the vehicle speed of the
時刻t8に、コンバイン1の車速は0(ゼロ)に達すると共に、コンバイン1は前進を開始する。コンバイン1の車速は、車速制御部24bによる制御によって、0(ゼロ)からV11へ漸近し始める。このときの車速変化率は、第1車速変化率g1である。
At time t8, the vehicle speed of the
時刻t9に、コンバイン1は位置P9に到達すると共に、コンバイン1の車速はV11に達する。位置P9は、作業対象領域CAの端に位置している。即ち、コンバイン1による刈取は、時刻t9に再開する。その後、コンバイン1の車速はV11に維持され、刈取走行が引き続き行われる。
At time t9, the
ここで、時刻t1から時刻t4までの間、コンバイン1は作業前進状態である。また、時刻t5から時刻t8までの間、コンバイン1は後進状態である。また、時刻t9に、コンバイン1は作業前進状態に戻る。即ち、時刻t4から時刻t5の間に、コンバイン1の機体の状態は変化している。また、時刻t8から時刻t9の間にも、コンバイン1の機体の状態は変化している。
Here, from time t1 to time t4, the
時刻t4から時刻t6までの間、車速制御部24bは、後進車速に車速を漸近させている。そして、このときの後進車速は、変化後の機体の状態である後進状態に対応する目標車速である。
Between time t4 and time t6, the vehicle
また、時刻t7から時刻t9までの間、車速制御部24bは、作業前進車速に車速を漸近させている。そして、このときの作業前進車速は、変化後の機体の状態である作業前進状態に対応する目標車速である。
Further, from time t7 to time t9, the vehicle
このように、車速制御部24bは、自動走行中における機体の状態の変化時に、変化後の機体の状態に対応する目標車速である変化後車速に車速を漸近させる。尚、以下では、変化後の機体の状態に対応する目標車速を、「変化後車速」と称する。
In this manner, the vehicle
また、図4に示す例では、コンバイン1は、圃場における位置P10から作業対象領域CAにおける未刈部分CA1に進入する。このときの時刻を、時刻t10とする。そして、コンバイン1は、刈取走行経路LIに沿って刈取走行を行い、位置P11に到達する。
In the example shown in FIG. 4, the
コンバイン1は、位置P11から未刈部分CA1の外部へ出ると共に、Uターンによる旋回を行う。そして、コンバイン1は、位置P12、P13を通過し、位置P14から未刈部分CA1に再び進入する。コンバイン1は、位置P14から刈取走行経路LIに沿って刈取走行を行い、位置P15に到達する。
The
コンバイン1は、位置P15から未刈部分CA1の外部へ出ると共に、穀粒排出のために、停車位置PPへ向かう走行を開始する。そして、コンバイン1は、位置P16、P17、P18を通過し、位置P19に到達する。
The
コンバイン1は、位置P19から離脱復帰経路LWに沿った非刈取走行を行う。そして、コンバイン1は、位置P20、P21、P22、P23、P24を通過し、停車位置PPに到達する。
The
図10では、図4に示す例における時刻t10以降のコンバイン1の車速の推移が示されている。尚、コンバイン1が位置P11、P12、P13、P14、P15、P16、P17、P18、P19、P20、P21、P22、P23、P24に到達したときの時刻を、それぞれ、時刻t11、t12、t13、t14、t15、t16、t17、t18、t19、t20、t21、t22、t23、t24とする。
FIG. 10 shows transition of the vehicle speed of the
即ち、図4及び図10に示す例において、コンバイン1は、時刻t10から時刻t11の間、及び、時刻t14から時刻t15の間は作業前進状態である。
That is, in the example shown in FIGS. 4 and 10, the
また、コンバイン1は、時刻t11から時刻t14の間、及び、時刻t18から時刻t19の間、及び、時刻t22から時刻t23の間は旋回状態である。
The
また、コンバイン1は、時刻t15から時刻t18の間、及び、時刻t19から時刻t22の間、及び、時刻t23以降は非作業状態である。
The
ここで、図4及び図10に示す例では、主変速レバー19の操作位置は第2操作位置Q11のままで維持されるものとする。また、図8に示すように、旋回車速、後進車速、非作業車速は、それぞれ、V2、V5、V7に設定されている。
Here, in the examples shown in FIGS. 4 and 10, the operating position of the
図10に示すように、時刻t10において、コンバイン1の車速はV11である。時刻t11まで、コンバイン1の車速はV11のままで維持される。
As shown in FIG. 10, at time t10, the vehicle speed of the
時刻t11に、コンバイン1は位置P11に到達する。位置P11は、未刈部分CA1の端に位置している。そのため、コンバイン1による刈取は、時刻t11で一旦終了する。そして、コンバイン1はUターンによる旋回を開始する。コンバイン1の車速は、車速制御部24bによる制御によって、V11からV2へ漸近し始める。このときの車速変化率は、第1車速変化率g1である。
At time t11, the
時刻t12に、コンバイン1の車速はV2に達する。その後、時刻t13まで、コンバイン1の車速はV2のままで維持される。
At time t12, the vehicle speed of the
時刻t13に、コンバイン1は位置P13に到達する。そして、位置P14から刈取走行を再開するために、コンバイン1の車速は、車速制御部24bによる制御によって、V2からV11へ漸近し始める。このときの車速変化率は、第2車速変化率g2である。
At time t13, the
時刻t14に、コンバイン1の車速はV11に達すると共に、コンバイン1は刈取走行を再開する。そして、時刻t15まで、コンバイン1の車速はV11のままで維持される。
At time t14, the vehicle speed of the
時刻t15に、コンバイン1は位置P15に到達する。位置P15は、未刈部分CA1の端に位置している。そのため、コンバイン1による刈取は、時刻t15で一旦終了する。そして、コンバイン1は非刈取走行を開始する。コンバイン1の車速は、車速制御部24bによる制御によって、V11からV7へ漸近し始める。このときの車速変化率は、第3車速変化率g3である。
At time t15, combine 1 reaches position P15. The position P15 is located at the end of the uncut portion CA1. Therefore, reaping by the
時刻t16に、コンバイン1の車速はV7に達する。その後、時刻t17まで、コンバイン1の車速はV7のままで維持される。
At time t16, the vehicle speed of the
時刻t17に、コンバイン1は位置P17に到達する。そして、位置P18から旋回を開始するために、コンバイン1の車速は、車速制御部24bによる制御によって、V7からV2へ漸近し始める。このときの車速変化率は、第4車速変化率g4である。
At time t17, combine 1 reaches position P17. Then, in order to start turning from the position P18, the vehicle speed of the
時刻t18に、コンバイン1の車速はV2に達すると共に、コンバイン1は旋回を開始する。そして、時刻t19まで、コンバイン1の車速はV2のままで維持される。
At time t18, the vehicle speed of the
時刻t19に、コンバイン1は位置P19に到達し、旋回を終了する。そして、コンバイン1は、離脱復帰経路LWに沿った走行を開始する。コンバイン1の車速は、車速制御部24bによる制御によって、V2からV7へ漸近し始める。このときの車速変化率は、第5車速変化率g5である。
At time t19, the
時刻t20に、コンバイン1の車速はV7に達する。その後、時刻t21まで、コンバイン1の車速はV7のままで維持される。
At time t20, the vehicle speed of
時刻t21に、コンバイン1は位置P21に到達する。そして、位置P22から旋回を開始するために、コンバイン1の車速は、車速制御部24bによる制御によって、V7からV2へ漸近し始める。このときの車速変化率は、第4車速変化率g4である。
At time t21, the
時刻t22に、コンバイン1の車速はV2に達すると共に、コンバイン1は旋回を開始する。そして、時刻t23まで、コンバイン1の車速はV2のままで維持される。
At time t22, the vehicle speed of the
時刻t23に、コンバイン1は位置P23に到達し、旋回を終了する。コンバイン1の車速は、車速制御部24bによる制御によって、V2からV7へ漸近し始める。このときの車速変化率は、第5車速変化率g5である。
At time t23, the
時刻t24に、コンバイン1の車速はV7に達する。その後、コンバイン1の車速はV7に維持され、停車位置PPへ向かう走行を続ける。
At time t24, the vehicle speed of the
尚、第4車速変化率g4は、第2車速変化率g2よりも大きい。また、第2車速変化率g2は、第3車速変化率g3よりも大きい。また、第3車速変化率g3は、第5車速変化率g5よりも大きい。また、第5車速変化率g5は、第1車速変化率g1よりも大きい。 The fourth vehicle speed change rate g4 is greater than the second vehicle speed change rate g2. Also, the second vehicle speed change rate g2 is greater than the third vehicle speed change rate g3. Also, the third vehicle speed change rate g3 is greater than the fifth vehicle speed change rate g5. Also, the fifth vehicle speed change rate g5 is greater than the first vehicle speed change rate g1.
ここで、時刻t10から時刻t11までの間、コンバイン1は作業前進状態である。また、時刻t11から時刻t14までの間、コンバイン1は旋回状態である。即ち、時刻t11に、コンバイン1は、作業前進状態から旋回状態に変化している。
Here, from time t10 to time t11, the
そして、車速制御部24bは、時刻t11において、旋回車速に車速を漸近させ始めている。このときの旋回車速は、変化後の機体の状態である旋回状態に対応する目標車速である。
Then, at time t11, the vehicle
このように、車速制御部24bは、自動走行中における機体の状態の変化後に、変化後車速に車速を漸近させ始めることが可能である。尚、「機体の状態の変化後」とは、機体の状態が変化した時点以降のことである。即ち、「機体の状態の変化後」には、機体の状態が変化した時点が含まれる。
In this way, the vehicle
また、時刻t14から時刻t15までの間、コンバイン1は作業前進状態である。即ち、時刻t14に、コンバイン1は、旋回状態から作業前進状態に変化している。
The
そして、車速制御部24bは、時刻t14よりも前の時点である時刻t13において、作業前進車速に車速を漸近させ始めている。このときの作業前進車速は、変化後の機体の状態である作業前進状態に対応する目標車速である。
At time t13, which is before time t14, the vehicle
このように、車速制御部24bは、自動走行中における機体の状態の変化前に、変化後車速に車速を漸近させ始めることが可能である。
In this manner, the vehicle
〔車速変化率について〕
図10に示すように、車速制御部24bは、車速をV11からV2へ漸近させる場合、車速を第1車速変化率g1で変化させる。また、車速制御部24bは、車速をV11からV7へ漸近させる場合、車速を第3車速変化率g3で変化させる。また、車速制御部24bは、車速をV2からV7へ漸近させる場合、車速を第5車速変化率g5で変化させる。
[Regarding vehicle speed change rate]
As shown in FIG. 10, the vehicle
このように、車速制御部24bは、車速が変化後車速よりも低い場合に、車速を第1車速変化率g1または第3車速変化率g3または第5車速変化率g5で変化させることにより変化後車速に車速を漸近させるように構成されている。尚、第1車速変化率g1、第3車速変化率g3、第5車速変化率g5は、何れも、本発明に係る「第1変化率」に相当する。
In this manner, when the vehicle speed is lower than the post-change vehicle speed, the vehicle
また、図10に示すように、車速制御部24bは、車速をV2からV11へ漸近させる場合、車速を第2車速変化率g2で変化させる。また、車速制御部24bは、車速をV7からV2へ漸近させる場合、車速を第4車速変化率g4で変化させる。
Further, as shown in FIG. 10, the vehicle
このように、車速制御部24bは、車速が変化後車速よりも高い場合に、車速を第2車速変化率g2または第4車速変化率g4で変化させることにより変化後車速に車速を漸近させるように構成されている。尚、上述の通り、第2車速変化率g2は、第1車速変化率g1、第3車速変化率g3、第5車速変化率g5の何れとも異なる。また、第4車速変化率g4は、第1車速変化率g1、第3車速変化率g3、第5車速変化率g5の何れとも異なる。また、第2車速変化率g2及び第4車速変化率g4は、何れも、本発明に係る「第2変化率」に相当する。
In this manner, when the vehicle speed is higher than the post-change vehicle speed, the vehicle
尚、上述の通り、第1車速変化率g1、第3車速変化率g3、第5車速変化率g5は、何れも、第2車速変化率g2よりも小さく、且つ、第4車速変化率g4よりも小さい。そのため、自動走行中にコンバイン1が増速する場合には、比較的緩やかに車速が変化する。これにより、急加速することによりオペレータに不安感を与えることを回避できる。
As described above, the first vehicle speed change rate g1, the third vehicle speed change rate g3, and the fifth vehicle speed change rate g5 are all smaller than the second vehicle speed change rate g2 and are smaller than the fourth vehicle speed change rate g4. is also small. Therefore, when the
また、自動走行中にコンバイン1が減速する場合には、比較的速やかに車速が変化する。これにより、減速時には、車速の変更を短時間で完了させることが可能となる。
Further, when the
また、図4及び図10に示すように、車速制御部24bが変化後車速に車速を漸近させる際の車速変化率は、機体の状態の変化パターンによって異なる。
Further, as shown in FIGS. 4 and 10, the vehicle speed change rate when the vehicle
より具体的には、車速制御部24bは、機体の状態が作業前進状態から旋回状態に変化する場合、車速を第1車速変化率g1で変化させるように構成されている。
More specifically, the vehicle
また、車速制御部24bは、機体の状態が旋回状態から作業前進状態に変化する場合、車速を第2車速変化率g2で変化させるように構成されている。
Further, the vehicle
また、車速制御部24bは、機体の状態が作業前進状態から非作業状態に変化する場合、車速を第3車速変化率g3で変化させるように構成されている。
Further, the vehicle
また、車速制御部24bは、機体の状態が非作業状態から旋回状態に変化する場合、車速を第4車速変化率g4で変化させるように構成されている。
Further, the vehicle
また、車速制御部24bは、機体の状態が旋回状態から非作業状態に変化する場合、車速を第5車速変化率g5で変化させるように構成されている。
Further, the vehicle
そして、上述の通り、第1車速変化率g1、第2車速変化率g2、第3車速変化率g3、第4車速変化率g4、第5車速変化率g5は、それぞれ異なっている。 As described above, the first vehicle speed change rate g1, the second vehicle speed change rate g2, the third vehicle speed change rate g3, the fourth vehicle speed change rate g4, and the fifth vehicle speed change rate g5 are different.
〔第1状態及び第2状態について〕
図4に示す例において、位置P10から刈取走行を開始する前の時点では、未刈部分CA1は、刈取作業がまだ行われていない。即ち、未刈部分CA1は、未作業領域AR1である。また、既刈部分CA2及び外周領域SAは、刈取作業が完了している。即ち、既刈部分CA2及び外周領域SAは、既作業領域AR2である。
[Regarding the first state and the second state]
In the example shown in FIG. 4, the reaping work has not yet been performed on the unreaped portion CA1 before the reaping travel is started from the position P10. That is, the uncut portion CA1 is the unworked area AR1. In addition, the reaping work has been completed for the reaping portion CA2 and the outer peripheral area SA. That is, the already cut portion CA2 and the outer peripheral area SA are the already worked area AR2.
そして、図4に示した例では、作業前進状態は、未作業領域AR1を走行する状態である。また、旋回状態及び非作業状態は、既作業領域AR2を走行する状態である。 In the example shown in FIG. 4, the work advance state is a state of traveling in the non-work area AR1. Also, the turning state and the non-working state are states of traveling in the already-worked area AR2.
以下では、未作業領域AR1を走行する状態を、「第1状態」と称する。また、既作業領域AR2を走行する状態を、「第2状態」と称する。即ち、本実施形態において、作業前進状態は、第1状態である。また、旋回状態、後進状態、非作業状態は、第2状態である。 Hereinafter, the state of traveling in the unworked area AR1 is referred to as "first state". Also, the state of traveling in the already-worked area AR2 is referred to as a "second state". That is, in this embodiment, the work advance state is the first state. Also, the turning state, the reverse state, and the non-working state are the second states.
ここで、車速制御部24bは、第1状態から第2状態へ機体の状態が変化する場合、第1状態から第2状態への変化後に、第2状態に対応する目標車速に車速を漸近させ始めるように構成されている。尚、「第1状態から第2状態への変化後」とは、機体の状態が第1状態から第2状態へ変化した時点以降のことである。即ち、「第1状態から第2状態への変化後」には、機体の状態が第1状態から第2状態へ変化した時点が含まれる。
Here, when the state of the airframe changes from the first state to the second state, the vehicle
図4及び図10に示した例では、時刻t11において、機体の状態が第1状態から第2状態へ変化している。そのため、このときは、第1状態から第2状態への変化後の時点である時刻t11に、第2状態に対応する目標車速に車速が漸近し始めている。尚、この場合における「第2状態に対応する目標車速」は、旋回車速である。 In the examples shown in FIGS. 4 and 10, the state of the aircraft changes from the first state to the second state at time t11. Therefore, at this time, the vehicle speed begins to asymptotically approach the target vehicle speed corresponding to the second state at time t11 after the change from the first state to the second state. The "target vehicle speed corresponding to the second state" in this case is the turning vehicle speed.
また、時刻t15においても、機体の状態が第1状態から第2状態へ変化している。そのため、このときは、第1状態から第2状態への変化後の時点である時刻t15に、第2状態に対応する目標車速に車速が漸近し始めている。尚、この場合における「第2状態に対応する目標車速」は、非作業車速である。 Also at time t15, the state of the aircraft has changed from the first state to the second state. Therefore, at this time, the vehicle speed begins to asymptotically approach the target vehicle speed corresponding to the second state at time t15 after the change from the first state to the second state. The "target vehicle speed corresponding to the second state" in this case is the non-working vehicle speed.
また、車速制御部24bは、第2状態から第1状態へ機体の状態が変化する場合、第2状態から第1状態への変化前に、第1状態に対応する目標車速に車速を漸近させ始めるように構成されている。
Further, when the state of the airframe changes from the second state to the first state, the vehicle
図4及び図10に示した例では、時刻t14において、機体の状態が第2状態から第1状態へ変化している。そのため、このときは、第2状態から第1状態への変化前の時点である時刻t13に、第1状態に対応する目標車速に車速が漸近し始めている。尚、この場合における「第1状態に対応する目標車速」は、作業前進車速である。 In the examples shown in FIGS. 4 and 10, the state of the aircraft changes from the second state to the first state at time t14. Therefore, at this time, the vehicle speed begins to asymptotically approach the target vehicle speed corresponding to the first state at time t13 before the change from the second state to the first state. The "target vehicle speed corresponding to the first state" in this case is the working forward vehicle speed.
以上で説明した構成であれば、機体の状態の変化時に、車速は変化後車速に漸近する。従って、機体の状態が変化する際、変化前の機体の状態に対応する目標車速と、変化後の機体の状態に対応する目標車速と、が比較的大きく異なる場合であっても、車速が急変することはない。 With the configuration described above, when the state of the aircraft changes, the vehicle speed asymptotically approaches the post-change vehicle speed. Therefore, when the state of the aircraft changes, even if the target vehicle speed corresponding to the state of the aircraft before the change and the target vehicle speed corresponding to the state of the aircraft after the change differ relatively greatly, the vehicle speed suddenly changes. never do.
これにより、コンバイン1に搭乗しているオペレータやコンバイン1の外部の監視者に不安感を与えることを回避できるコンバイン1を実現できる。
Thereby, the
尚、以上に記載した実施形態は一例に過ぎないのであり、本発明はこれに限定されるものではなく、適宜変更が可能である。 It should be noted that the embodiment described above is merely an example, and the present invention is not limited to this, and can be modified as appropriate.
〔その他の実施形態〕
(1)走行装置11は、ホイール式であっても良いし、セミクローラ式であっても良い。
[Other embodiments]
(1) The
(2)上記実施形態においては、経路算出部23により算出される刈取走行経路LIは、縦横方向に延びる複数のメッシュ線である。しかしながら、本発明はこれに限定されず、経路算出部23により算出される刈取走行経路LIは、縦横方向に延びる複数のメッシュ線でなくても良い。例えば、経路算出部23により算出される刈取走行経路LIは、渦巻き状の走行経路であっても良い。また、刈取走行経路LIは、別の刈取走行経路LIと直交していなくても良い。また、経路算出部23により算出される刈取走行経路LIは、互いに平行な複数の平行線であっても良い。
(2) In the above embodiment, the reaping travel path LI calculated by the
(3)上記実施形態においては、オペレータは、コンバイン1を手動で操作し、図2に示すように、圃場内の外周部分において、圃場の境界線に沿って周回するように刈取走行を行う。しかしながら、本発明はこれに限定されず、コンバイン1が自動で走行し、圃場内の外周部分において、圃場の境界線に沿って周回するように刈取走行を行うように構成されていても良い。また、このときの周回数は、3周以外の数であっても良い。例えば、このときの周回数は2周であっても良い。
(3) In the above embodiment, the operator manually operates the
(4)自車位置算出部21、領域算出部22、経路算出部23、走行制御部24のうち、一部または全てがコンバイン1の外部に備えられていても良いのであって、例えば、コンバイン1の外部に設けられた管理サーバに備えられていても良い。
(4) Some or all of the vehicle
(5)車速設定部24aは、主変速レバー19の人為操作に応じて非作業車速を設定するように構成されていても良い。
(5) The vehicle
(6)車速設定部24aは、主変速レバー19の人為操作に応じて後進車速を設定するように構成されていても良い。
(6) The vehicle
(7)車速設定部24aは、主変速レバー19の人為操作に応じて旋回車速を設定するように構成されていても良い。
(7) The vehicle
(8)通信端末4は設けられていなくても良い。
(8) The
(9)主変速レバー19は、複数段階に操作可能に構成されていても良い。この場合、車速設定部24aは、作業前進車速を複数段階に設定するように構成されていても良い。
(9) The
(10)車速制御部24bが変化後車速に車速を漸近させる際の車速変化率は、機体の状態の変化パターンによって異ならなくても良い。例えば、車速制御部24bは、機体の状態が作業前進状態から旋回状態に変化する場合、旋回状態から作業前進状態に変化する場合、作業前進状態から非作業状態に変化する場合、非作業状態から旋回状態に変化する場合、旋回状態から非作業状態に変化する場合、の何れにおいても、車速を第1車速変化率g1で変化させるように構成されていても良い。
(10) The rate of change in vehicle speed when the vehicle
(11)車速制御部24bは、車速が変化後車速よりも低い場合、及び、車速が変化後車速よりも高い場合の何れにおいても、車速を第1車速変化率g1で変化させることにより変化後車速に車速を漸近させるように構成されていても良い。
(11) The vehicle
(12)車速制御部24bは、第1状態から第2状態へ機体の状態が変化する場合、第1状態から第2状態への変化前に、第2状態に対応する目標車速に車速を漸近させ始めるように構成されていても良い。
(12) When the state of the aircraft changes from the first state to the second state, the vehicle
(13)車速制御部24bは、第2状態から第1状態へ機体の状態が変化する場合、第2状態から第1状態への変化後に、第1状態に対応する目標車速に車速を漸近させ始めるように構成されていても良い。
(13) When the state of the airframe changes from the second state to the first state, the vehicle
(14)車速制御部24bは、自動走行中における機体の状態の変化前に変化後車速に車速を漸近させ始めることが不可能であるように構成されていても良い。
(14) The vehicle
(15)車速制御部24bは、自動走行中における機体の状態の変化後に変化後車速に車速を漸近させ始めることが不可能であるように構成されていても良い。
(15) The vehicle
(16)上記実施形態において、車速制御部24bは、変化後車速に車速を漸近させる際、車速が変化後車速に達するまで一定の車速変化率で車速を変化させる。しかしながら、本発明はこれに限定されず、車速制御部24bは、車速変化率を変化させながら、変化後車速に車速を漸近させるように構成されていても良い。例えば、車速制御部24bは、変化後車速に車速を漸近させる際、車速変化率を、0(ゼロ)から所定値まで連続的に増加させた後、その所定値から0(ゼロ)まで連続的に減少させるように構成されていても良い。
(16) In the above embodiment, when causing the vehicle speed to asymptotically approach the post-change vehicle speed, the vehicle
本発明は、普通型のコンバインだけでなく、自脱型のコンバイン、田植機、トラクタ等の種々の農作業機に利用可能である。 INDUSTRIAL APPLICABILITY The present invention is applicable not only to ordinary combine harvesters, but also to various agricultural work machines such as self-trimming combine harvesters, rice transplanters, and tractors.
1 コンバイン(農作業機)
24a 車速設定部
24b 車速制御部
AR1 未作業領域
AR2 既作業領域
g1 第1車速変化率(第1変化率)
g2 第2車速変化率(第2変化率)
g3 第3車速変化率(第1変化率)
g4 第4車速変化率(第2変化率)
g5 第5車速変化率(第1変化率)
1 combine (agricultural machine)
24a Vehicle
g2 second rate of change in vehicle speed (second rate of change)
g3 third vehicle speed change rate (first change rate)
g4 fourth vehicle speed change rate (second change rate)
g5 Fifth rate of change in vehicle speed (first rate of change)
Claims (3)
自動走行中の機体の状態毎に個別の目標車速を設定可能な車速設定部と、
前記車速設定部により設定された目標車速に基づいて車速を制御する車速制御部と、を備え、
前記車速制御部は、自動走行中における機体の状態の変化時に、変化後の機体の状態に対応する目標車速である変化後車速に車速を漸近させ、
未作業領域を走行する状態である第1状態から、既作業領域を走行する状態である第2状態へ、機体の状態が変化する場合、前記車速制御部は、前記第1状態から前記第2状態への変化後に、前記第2状態に対応する目標車速に車速を漸近させ始めるように制御し、
前記第2状態から前記第1状態へ機体の状態が変化する場合、前記車速制御部は、前記第2状態から前記第1状態への変化前に、前記第1状態に対応する目標車速に車速を漸近させ始め、且つ、前記第1状態へ変化するまでに、前記第1状態に対応する目標車速に達するように制御する農作業機。 An agricultural work machine capable of automatically traveling,
a vehicle speed setting unit capable of setting an individual target vehicle speed for each state of the aircraft during automatic driving;
a vehicle speed control unit that controls the vehicle speed based on the target vehicle speed set by the vehicle speed setting unit;
The vehicle speed control unit causes the vehicle speed to asymptotically approach a post-change vehicle speed, which is a target vehicle speed corresponding to the state of the aircraft after the change, when the state of the aircraft changes during automatic driving ,
When the state of the machine body changes from the first state of traveling in an unworked area to the second state of traveling in an already-worked area, the vehicle speed control unit changes from the first state to the second state. after the change to the state, control so that the vehicle speed begins to asymptotically approach the target vehicle speed corresponding to the second state;
When the state of the aircraft body changes from the second state to the first state, the vehicle speed control unit adjusts the vehicle speed to the target vehicle speed corresponding to the first state before the change from the second state to the first state. and reach a target vehicle speed corresponding to the first state before changing to the first state .
車速が前記変化後車速よりも高い場合、前記車速制御部は、車速を前記第1変化率とは異なる第2変化率で変化させることにより前記変化後車速に車速を漸近させる請求項1に記載の農作業機。 When the vehicle speed is lower than the post-change vehicle speed, the vehicle speed control unit changes the vehicle speed at a first change rate to cause the vehicle speed to asymptotically approach the post-change vehicle speed,
2. The vehicle speed control unit according to claim 1 , wherein when the vehicle speed is higher than the post-change vehicle speed, the vehicle speed control unit causes the vehicle speed to asymptotically approach the post-change vehicle speed by changing the vehicle speed at a second change rate different from the first change rate. agricultural machinery.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018220467A JP7117980B2 (en) | 2018-11-26 | 2018-11-26 | agricultural machine |
| PCT/JP2019/045720 WO2020110920A1 (en) | 2018-11-26 | 2019-11-22 | Agricultural work machine, agricultural work machine control program, recording medium having agricultural work machine control program recorded thereon, agricultural work machine control method, harvesting machine, harvesting machine control program, recording medium having harvesting machine control program recorded thereon, and harvesting machine control method |
| KR1020217013338A KR20210093873A (en) | 2018-11-26 | 2019-11-22 | Agricultural equipment, agricultural equipment control program, recording medium recording agricultural equipment control program, agricultural equipment control method, harvester, harvester control program, recording medium recording harvester control program, harvester control method |
| CN201980074233.7A CN113079691B (en) | 2018-11-26 | 2019-11-22 | Agricultural machine, control method therefor, agricultural machine control program, and recording medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018220467A JP7117980B2 (en) | 2018-11-26 | 2018-11-26 | agricultural machine |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020080735A JP2020080735A (en) | 2020-06-04 |
| JP7117980B2 true JP7117980B2 (en) | 2022-08-15 |
Family
ID=70909441
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018220467A Active JP7117980B2 (en) | 2018-11-26 | 2018-11-26 | agricultural machine |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7117980B2 (en) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130103269A1 (en) | 2011-10-20 | 2013-04-25 | Lars Peter Meyer zu Helligen | Visualization device |
| US20160159352A1 (en) | 2014-12-08 | 2016-06-09 | Hyundai Motor Company | Apparatus and method for controlling auto cruise speed of vehicle |
| WO2018042853A1 (en) | 2016-09-05 | 2018-03-08 | 株式会社クボタ | Autonomous work vehicle travel system, travel route-managing device, travel route-generating device, and travel route-determining device |
| WO2018174249A1 (en) | 2017-03-24 | 2018-09-27 | ヤンマー株式会社 | Work vehicle |
-
2018
- 2018-11-26 JP JP2018220467A patent/JP7117980B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130103269A1 (en) | 2011-10-20 | 2013-04-25 | Lars Peter Meyer zu Helligen | Visualization device |
| US20160159352A1 (en) | 2014-12-08 | 2016-06-09 | Hyundai Motor Company | Apparatus and method for controlling auto cruise speed of vehicle |
| WO2018042853A1 (en) | 2016-09-05 | 2018-03-08 | 株式会社クボタ | Autonomous work vehicle travel system, travel route-managing device, travel route-generating device, and travel route-determining device |
| WO2018174249A1 (en) | 2017-03-24 | 2018-09-27 | ヤンマー株式会社 | Work vehicle |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020080735A (en) | 2020-06-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2020110920A1 (en) | Agricultural work machine, agricultural work machine control program, recording medium having agricultural work machine control program recorded thereon, agricultural work machine control method, harvesting machine, harvesting machine control program, recording medium having harvesting machine control program recorded thereon, and harvesting machine control method | |
| CN111386030B (en) | Automatic travel system, automatic travel management program and method, and recording medium | |
| JP7117985B2 (en) | automatic driving control system | |
| JP7113726B2 (en) | agricultural machine | |
| JP7423666B2 (en) | harvester | |
| JP7136623B2 (en) | Work management system and work management method | |
| US20220382278A1 (en) | Autonomous Operation Method, Work Vehicle, And Autonomous Operation System | |
| JP7275011B2 (en) | agricultural machine | |
| JP2022191350A (en) | Automatic travel control system | |
| JP7117980B2 (en) | agricultural machine | |
| JP7142433B2 (en) | harvester control system | |
| CN113301794B (en) | Vehicle speed control system | |
| JP7224151B2 (en) | Driving route generation system and driving route generation method | |
| JP7213670B2 (en) | automatic driving control system | |
| JP7378282B2 (en) | combine | |
| JP2023081438A (en) | Automatic travel method, work vehicle and automatic travel system | |
| KR20210067924A (en) | Automatic traveling control system, combine and harvester | |
| JP2022060020A (en) | Agricultural work machine | |
| JP2021083392A (en) | Harvester | |
| JP7334281B2 (en) | harvester | |
| JP7195247B2 (en) | harvester | |
| JP2023095190A (en) | Traveling management system | |
| WO2022201902A1 (en) | Autonomous driving method, work vehicle, and autonomous driving system | |
| JP2023143991A (en) | Route generating system | |
| JP2022131908A (en) | Automatic travel control system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211026 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20211130 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220224 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220705 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220802 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7117980 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |