JP7098979B2 - How to adjust the position of the transfer device, transfer system and head unit - Google Patents
How to adjust the position of the transfer device, transfer system and head unit Download PDFInfo
- Publication number
- JP7098979B2 JP7098979B2 JP2018050039A JP2018050039A JP7098979B2 JP 7098979 B2 JP7098979 B2 JP 7098979B2 JP 2018050039 A JP2018050039 A JP 2018050039A JP 2018050039 A JP2018050039 A JP 2018050039A JP 7098979 B2 JP7098979 B2 JP 7098979B2
- Authority
- JP
- Japan
- Prior art keywords
- head unit
- sensor
- actuator
- command value
- liquid
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





























Landscapes
- Ink Jet (AREA)
Description
本発明は、搬送装置、搬送システム及びヘッドユニットの位置を調整する方法に関するものである。 The present invention relates to a method of adjusting the positions of a transfer device, a transfer system and a head unit.
従来、ヘッドユニットを用いて様々な処理を行う方法が知られている。例えば、プリントヘッドからインクを吐出する、いわゆるインクジェット方式によって画像形成等を行う方法が知られている。この画像形成によって、印刷媒体に印刷される画像の印刷品質を向上させる方法が知られている。 Conventionally, there are known methods of performing various processes using a head unit. For example, a method of forming an image by a so-called inkjet method of ejecting ink from a print head is known. A method of improving the print quality of an image printed on a print medium by this image formation is known.
例えば、印刷品質を向上させるため、プリントヘッドの位置を調整する方法が知られている。具体的には、まず、連続用紙印刷システムを通る印刷媒体であるウェブ(web)の横方向における位置変動がセンサによって検出される。このセンサによって検出される位置変動を補償するように、横方向におけるプリントヘッドの位置を調整する方法が知られている(例えば、特許文献1参照)。 For example, a method of adjusting the position of a print head is known in order to improve print quality. Specifically, first, the position fluctuation in the lateral direction of the web (web), which is a printing medium passing through the continuous paper printing system, is detected by the sensor. A method of adjusting the position of the print head in the lateral direction so as to compensate for the position variation detected by this sensor is known (see, for example, Patent Document 1).
しかしながら、例えば、画像形成される画像の画質を向上させる等のためには、吐出される液体の着弾位置を精度良くするように求められる場合がある。これに対して、従来の技術では、吐出される液体の着弾位置等の処理位置の精度が悪い場合があるのが課題となる。 However, for example, in order to improve the image quality of the image to be formed, it may be required to improve the landing position of the discharged liquid. On the other hand, in the conventional technique, there is a problem that the accuracy of the processing position such as the landing position of the discharged liquid may be poor.
本発明の1つの側面は、液体吐出ヘッドユニットから吐出される液体の着弾位置等の、ヘッドユニットによる処理位置をより精度良く合わせる技術又は装置を提供できることを目的とする。 One aspect of the present invention is to provide a technique or device for more accurately adjusting the processing position by the head unit, such as the landing position of the liquid discharged from the liquid discharge head unit.
上述した課題を解決するために、本発明の一態様である、ヘッドユニットを有し、搬送される被搬送物に対して前記ヘッドユニットによって処理を行う搬送装置は、前記ヘッドユニットを搬送方向と直交する直交方向へ移動させるアクチュエータと、前記アクチュエータを制御するアクチュエータコントローラと、前記アクチュエータによる移動に伴う前記ヘッドユニットの変位量を検知する変位センサと、前記直交方向の前記被搬送物の位置、移動速度、移動量又はこれらの組み合わせを示す検出結果と、前記変位センサの出力と、に基づいて前記アクチュエータコントローラへ指令値を出力するコントローラと、を備え、前記コントローラは、前記検出結果に応じた指令値が示す移動量と、当該指令値で動作させた際の前記変位センサの出力が示す変位量との差分に基づいて、前記変位量が振動する振動周期、前記振動周期の整数倍となる周期ごとに、指令値を補正する補正値を計算する。 In order to solve the above-mentioned problems, the transport device having a head unit and processing the transported object by the head unit, which is one aspect of the present invention, has the head unit in the transport direction. An actuator that moves in an orthogonal direction, an actuator controller that controls the actuator, a displacement sensor that detects the amount of displacement of the head unit due to movement by the actuator, and a position and movement of the object to be transported in the orthogonal direction. A detection result indicating a speed, a movement amount or a combination thereof, a controller that outputs a command value to the actuator controller based on the output of the displacement sensor, and the controller include a command according to the detection result. A vibration cycle in which the displacement amount vibrates based on the difference between the movement amount indicated by the value and the displacement amount indicated by the output of the displacement sensor when operated at the command value, and a cycle that is an integral multiple of the vibration cycle. For each, the correction value for correcting the command value is calculated.
ヘッドユニットによる処理位置をより精度良く合わせることができる。 The processing position by the head unit can be adjusted more accurately.
以下、本発明の実施形態について添付の図面を参照しながら説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付し、重複する説明を省略する。 Hereinafter, embodiments of the present invention will be described with reference to the accompanying drawings. In the present specification and the drawings, the components having substantially the same functional configuration are designated by the same reference numerals, and duplicate description will be omitted.
<全体構成例>
以下、搬送装置が有するヘッドユニットが、液体を吐出するヘッドユニットであり、液体吐出ヘッドユニットが液体をウェブに吐出する位置を「処理位置」とする場合を例に説明する。また、搬送装置が有するヘッドユニットが液体を吐出する液体吐出ヘッドユニットである場合、搬送装置は、液体を吐出する装置である。
<Overall configuration example>
Hereinafter, a case where the head unit included in the transport device is a head unit for discharging liquid and the position where the liquid discharge head unit discharges liquid to the web is defined as a “processing position” will be described as an example. Further, when the head unit included in the transport device is a liquid discharge head unit that discharges liquid, the transport device is a device that discharges liquid.
図1は、本発明の一実施形態に係る液体を吐出する装置の一例を示す概略図である。例えば、液体を吐出する装置では、吐出される液体は、水性又は油性のインク等の記録液である。以下、液体を吐出する装置110が画像形成装置である例で説明する。
FIG. 1 is a schematic view showing an example of a device for discharging a liquid according to an embodiment of the present invention. For example, in a device that ejects a liquid, the ejected liquid is a recording liquid such as water-based or oil-based ink. Hereinafter, an example in which the
液体を吐出する装置110は、ウェブ120等の被搬送物を搬送する。図示する例では、液体を吐出する装置110は、ローラ130等によって搬送されるウェブ120に対して、液体を吐出して画像形成を行う。画像が形成される場合、ウェブ120は、記録媒体とも言える。また、ウェブ120は、いわゆる連続用紙印刷媒体等である。すなわち、ウェブ120は、巻き取りが可能なロール状のシート等である。例えば、液体を吐出する装置110は、いわゆるプロダクション・プリンタである。
The
以下の説明では、ローラ130が、ウェブ120の張力を調整等し、図示する方向(以下「搬送方向10」という。)にウェブ120が搬送される例で説明する。
In the following description, an example will be described in which the
さらに、図では、搬送方向10に直交する方向を直交方向20とする例である。
Further, in the figure, the direction orthogonal to the
また、この例では、液体を吐出する装置110は、ブラック(K)、シアン(C)、マゼンタ(M)及びイエロー(Y)の4色のそれぞれのインクを吐出してウェブ120の所定の箇所に画像を形成するインクジェットプリンタである。
Further, in this example, the
図2は、本発明の一実施形態に係る液体を吐出する装置の全体構成例を示す概略図である。図示するように、液体を吐出する装置110は、4色のそれぞれのインクを吐出するため、4つの液体吐出ヘッドユニットを有する。
FIG. 2 is a schematic view showing an overall configuration example of a device for discharging a liquid according to an embodiment of the present invention. As shown in the figure, the
各液体吐出ヘッドユニットは、搬送方向10に搬送されるウェブ120に対して、各色のそれぞれの液体を吐出する処理を行う。また、ウェブ120は、2対のニップローラ(nip roller)及びローラ230等で搬送されるとする。以下、この2対のニップローラのうち、各液体吐出ヘッドユニットより上流側に設置されるニップローラを「第1ニップローラNR1」という。一方で、第1ニップローラNR1及び各液体吐出ヘッドユニットより下流側に設置されるニップローラを「第2ニップローラNR2」という。
Each liquid discharge head unit performs a process of discharging each liquid of each color to the
なお、各ニップローラは、図示するように、ウェブ120等の被搬送物を挟んで回転する。このように、各ニップローラ及びローラ230は、ウェブ120等を所定の方向へ搬送する機構等である。
As shown in the figure, each nip roller rotates with an object to be transported such as a
また、ウェブ120の記録媒体は、長尺であるのが望ましい。具体的には、記録媒体の長さは、第1ニップローラNR1と、第2ニップローラNR2との距離より長いのが望ましい。さらに、記録媒体は、ウェブに限られない。すなわち、記録媒体は、折り畳まれて格納されるシート、いわゆる「Z紙」等でもよい。
Further, it is desirable that the recording medium of the
以下、図示する全体構成例では、各液体吐出ヘッドユニットは、上流側から下流側に向かって、ブラック(K)、シアン(C)、マゼンタ(M)及びイエロー(Y)の順に設置されるとする。すなわち、最も上流側に設置される液体吐出ヘッドユニット(以下「ブラック液体吐出ヘッドユニット210K」という。)をブラック(K)用とする。このブラック液体吐出ヘッドユニット210Kの次に設置される液体吐出ヘッドユニット(以下「シアン液体吐出ヘッドユニット210C」という。)をシアン(C)用とする。さらに、シアン液体吐出ヘッドユニット210Cの次に設置される液体吐出ヘッドユニット(以下「マゼンタ液体吐出ヘッドユニット210M」という。)をマゼンタ(M)用とする。続いて、最も下流側に設置される液体吐出ヘッドユニット(以下「イエロー液体吐出ヘッドユニット210Y」という。)をイエロー(Y)用とする。
In the overall configuration example shown below, each liquid discharge head unit is installed in the order of black (K), cyan (C), magenta (M), and yellow (Y) from the upstream side to the downstream side. do. That is, the liquid discharge head unit (hereinafter referred to as "black liquid
各液体吐出ヘッドユニットは、画像データ等に基づいて、ウェブ120の所定の箇所に、各色のインクをそれぞれ吐出する。そして、吐出されたインクがウェブ120に着弾する位置(以下「着弾位置」という。)は、液体吐出ヘッドユニットが吐出を行う位置(以下「吐出位置」という。)のほぼ直下となる。
Each liquid ejection head unit ejects ink of each color to a predetermined portion of the
以下、液体吐出ヘッドユニットによって処理が行われる被搬送物の位置である処理位置を、吐出位置とする例で説明する。 Hereinafter, an example will be described in which the processing position, which is the position of the object to be processed to be processed by the liquid discharge head unit, is set as the discharge position.
また、上記のように、被搬送物に対する吐出位置は、被搬送物への着弾位置のほぼ直下であるため、処理位置を着弾位置として説明する場合もある。この例では、ブラックのインクは、ブラック液体吐出ヘッドユニット210Kの着弾位置(以下「ブラック着弾位置PK」という。)に吐出される。同様に、シアンのインクは、シアン液体吐出ヘッドユニット210Cの着弾位置(以下「シアン着弾位置PC」という。)に吐出される。さらに、マゼンタのインクは、マゼンタ液体吐出ヘッドユニット210Mの着弾位置(以下「マゼンタ着弾位置PM」という。)に吐出される。また、イエローのインクは、イエロー液体吐出ヘッドユニット210Yの着弾位置(以下「イエロー着弾位置PY」という。)に吐出される。
Further, as described above, since the discharge position for the transported object is substantially directly below the landing position for the transported object, the processing position may be described as the landing position. In this example, the black ink is ejected to the landing position of the black liquid
以下、各ヘッドユニットが処理を行うタイミングを、「処理タイミング」という。具体的には、各液体吐出ヘッドユニットの処理タイミングは、各液体吐出ヘッドユニットがインクを吐出するタイミングである。 Hereinafter, the timing at which each head unit performs processing is referred to as "processing timing". Specifically, the processing timing of each liquid ejection head unit is the timing at which each liquid ejection head unit ejects ink.
それぞれの処理タイミングの制御及び各液体吐出ヘッドユニットに設けられたアクチュエータAC1、AC2、AC3、AC4の制御は、例えば各液体吐出ヘッドユニットに接続されるコントローラ520が行う。
The control of each processing timing and the control of the actuators AC1, AC2, AC3, and AC4 provided in each liquid discharge head unit are performed by, for example, the
以下、アクチュエータAC1、AC2、AC3、AC4をまとめて単に「アクチュエータAC」という場合がある。処理タイミングの制御とアクチュエータACについては、後述する。 Hereinafter, the actuators AC1, AC2, AC3, and AC4 may be collectively referred to as “actuator AC”. The processing timing control and the actuator AC will be described later.
また、図示する例では、液体吐出ヘッドユニットごとに、複数のローラがそれぞれ設置される。図示するように、複数のローラは、例えば、各液体吐出ヘッドユニットを挟んで、上流側と、下流側とにそれぞれ設置される。 Further, in the illustrated example, a plurality of rollers are installed for each liquid discharge head unit. As shown in the figure, a plurality of rollers are installed on the upstream side and the downstream side, respectively, with each liquid discharge head unit interposed therebetween, for example.
具体的には、ウェブ120の搬送経路において、液体吐出ヘッドユニットごとに各着弾位置の上流側にウェブ120を支持するローラ(以下「第1ローラ」という。)がそれぞれ設置される。また、各着弾位置から下流側に、ウェブ120を支持するローラ(以下「第2ローラ」という。)が、それぞれ設置される。
Specifically, in the transport path of the
このように、第1ローラ及び第2ローラがそれぞれ設置されると、各着弾位置において、いわゆる「ばたつき」が少なくできる。なお、第1ローラ及び第2ローラは、記録媒体の搬送経路に用いられ、例えば、従動ローラである。また、第1ローラ及び第2ローラは、モータ等により回転駆動されるローラであってもよい。 When the first roller and the second roller are installed in this way, so-called "fluttering" can be reduced at each landing position. The first roller and the second roller are used for the transport path of the recording medium, and are, for example, driven rollers. Further, the first roller and the second roller may be rollers that are rotationally driven by a motor or the like.
なお、第1の支持部材の例である第1ローラ及び第2の支持部材の例である第2ローラは、従動ローラ等の回転体でなくてもよい。すなわち、第1ローラ及び第2ローラは、被搬送物を支える支持部材であればよい。例えば、第1の支持部材及び第2の支持部材は、断面円形状のパイプ又はシャフト等でもよい。 The first roller, which is an example of the first support member, and the second roller, which is an example of the second support member, do not have to be a rotating body such as a driven roller. That is, the first roller and the second roller may be support members that support the object to be transported. For example, the first support member and the second support member may be a pipe or a shaft having a circular cross section.
他にも、第1の支持部材及び第2の支持部材は、被搬送物と接する部位が円弧状となる湾曲板等であってもよい。以下、第1の支持部材が第1ローラであり、かつ、第2の支持部材が第2ローラである例で説明する。 In addition, the first support member and the second support member may be a curved plate or the like whose portion in contact with the transported object has an arc shape. Hereinafter, an example will be described in which the first support member is the first roller and the second support member is the second roller.
具体的には、ブラック着弾位置PKのウェブ120の搬送方向上流側にブラック用第1ローラCR1Kが設置される。これに対して、ブラック着弾位置PKからウェブ120の搬送方向下流側にブラック用第2ローラCR2Kが設置される。同様に、シアン液体吐出ヘッドユニット210Cに対して、シアン用第1ローラCR1C及びシアン用第2ローラCR2Cがそれぞれ設置される。さらに、マゼンタ液体吐出ヘッドユニット210Mに対して、マゼンタ用第1ローラCR1M及びマゼンタ用第2ローラCR2Mがそれぞれ設置される。また、イエロー液体吐出ヘッドユニット210Yに対して、イエロー用第1ローラCR1Y及びイエロー用第2ローラCR2Yがそれぞれ設置される。
Specifically, the black first roller CR1K is installed on the upstream side of the
液体を吐出する装置110は、例えば、図2に示すように、液体吐出ヘッドユニットごとに、センサデバイス(以下「第1センサデバイス」という。)を備える。センサデバイスは、被搬送物の直交方向の位置を検知可能な被搬送物検知センサを含むユニットである。被搬送物検知センサは、ウェブ120の情報を取得可能なセンサである。
As shown in FIG. 2, for example, the
なお、被搬送物検知センサは、画像形成中に、ウェブ120の直交方向の位置を検知可能である。また、液体を吐出する装置110は、第1センサデバイスとは別に、第1センサデバイスより上流側に、センサデバイス(以下「第2センサデバイスSEN2」という。)を更に備えてもよい。つまり、液体を吐出する装置110は、図2に示す例では、4つの第1センサデバイスと、1つの第2センサデバイスSEN2とを合わせて、合計5つのセンサデバイスを備える。
The object to be transported detection sensor can detect the position of the
また、以下の説明では、各第1センサデバイス及び第2センサデバイスを総じて、単に「センサデバイスSEN」という場合がある。なお、被搬送物検知センサは、図示する構成及び図示する位置に設置される構成に限られない。また、第2センサデバイスSEN2は、なくてもよい。 Further, in the following description, each of the first sensor device and the second sensor device may be collectively referred to simply as "sensor device SEN". The object to be transported detection sensor is not limited to the configuration shown in the figure and the configuration installed at the position shown in the figure. Further, the second sensor device SEN2 may not be provided.
以下の説明は、被搬送物検知センサが合計5つの例で説明する。なお、被搬送物検知センサの数は、5つに限られない。すなわち、被搬送物検知センサの数は、第1センサ及び第2センサの数を合計して液体吐出ヘッドユニットの数以上の数であるのが望ましい。例えば、液体吐出ヘッドユニットごとに2つ以上の被搬送物検知センサが設置されてもよい。同様に、第2センサは、2つ以上設置されてもよい。 In the following description, a total of five examples of the transported object detection sensor will be described. The number of objects to be detected is not limited to five. That is, it is desirable that the number of objects to be detected is equal to or greater than the total number of the first sensor and the second sensor and the number of liquid discharge head units. For example, two or more object detection sensors may be installed for each liquid discharge head unit. Similarly, two or more second sensors may be installed.
この被搬送物検知センサには、レーザ、空気圧、超音波又は赤外線等の光を利用する光学センサ等が用いられる。なお、光学センサは、例えば、CCD(Charge Coupled Device)カメラ又はCMOSカメラ(Complementary Metal Oxide Semiconductor)等でもよい。なお、各被搬送物検知センサは、すべて同一の種類でもよいし、異なる種類でもよい。以下の説明では、すべての被搬送物検知センサは、同一の種類とする。 As the transported object detection sensor, an optical sensor or the like that uses light such as a laser, pneumatic pressure, ultrasonic waves, or infrared rays is used. The optical sensor may be, for example, a CCD (Charge Coupled Device) camera, a CMOS camera (Complementary Metal Oxide Sensor), or the like. It should be noted that the objects to be transported detection sensors may all be of the same type or may be of different types. In the following description, all the objects to be transported detection sensors are of the same type.
以下の説明では、ブラック液体吐出ヘッドユニット210Kに対して設置されるセンサデバイスを「ブラック用センサデバイスSENK」という。同様に、シアン液体吐出ヘッドユニット210Cに対して設置されるセンサデバイスを「シアン用センサデバイスSENC」という。さらに、マゼンタ液体吐出ヘッドユニット210Mに対して設置されるセンサデバイスを「マゼンタ用センサデバイスSENM」という。さらにまた、イエロー液体吐出ヘッドユニット210Yに対して設置されるセンサデバイスを「イエロー用センサデバイスSENY」という。
In the following description, the sensor device installed for the black liquid
また、以下の説明において、「被搬送物検知センサが設置される位置」は、データの取得等が行われる位置を指す。したがって、「被搬送物検知センサが設置される位置」に、センサデバイスのすべての構成が設置される必要はなく、ウェブ120のデータの取得に必要な機能以外は、ケーブル等で接続されて他の位置に設置されてもよい。
Further, in the following description, the "position where the transported object detection sensor is installed" refers to a position where data acquisition or the like is performed. Therefore, it is not necessary to install all the configurations of the sensor device at the "position where the transported object detection sensor is installed", and other than the functions required for acquiring the data of the
なお、図におけるブラック用センサデバイスSENK、シアン用センサデバイスSENC、マゼンタ用センサデバイスSENM、イエロー用センサデバイスSENY及び第2センサデバイスSEN2は、被搬送物検知センサが設置される位置の例を示す。 In the figure, the black sensor device SENK, the cyan sensor device SENC, the magenta sensor device SENM, the yellow sensor device SENY, and the second sensor device SEN2 show an example of the position where the transported object detection sensor is installed.
例えば、第1センサデバイスに含まれる被搬送物検知センサが設置される位置は、図示するように、ブラック用ローラ間INTK1、シアン用ローラ間INTC1、マゼンタ用ローラ間INTM1及びイエロー用ローラ間INTY1等である。望ましくは、被搬送物検知センサが設置される位置は、図示するように、ブラック用上流区間INTK2、シアン用上流区間INTC2、マゼンタ用上流区間INTM2及びイエロー用上流区間INTY2等である。 For example, as shown in the figure, the position where the transported object detection sensor included in the first sensor device is installed is such as INTK1 between rollers for black, INTC1 between rollers for cyan, INTM1 between rollers for magenta, and INTY1 between rollers for yellow. Is. Desirably, the position where the transported object detection sensor is installed is, as shown in the figure, an upstream section INTK2 for black, an upstream section INTC2 for cyan, an upstream section INTM2 for magenta, an upstream section INTY2 for yellow, and the like.
図3は、本発明の一実施形態に係る液体を吐出する装置における第1センサデバイスが設置される位置の一例を示す図である。以下、ブラックを例に説明する。この例では、ブラック用センサデバイスSENKは、ブラック用第1ローラCR1K及びブラック用第2ローラCR2Kの間であって、ブラック着弾位置PKよりブラック用第1ローラCR1Kに近い位置に設置されるのが望ましい。 FIG. 3 is a diagram showing an example of a position where a first sensor device is installed in a device for discharging a liquid according to an embodiment of the present invention. Hereinafter, black will be described as an example. In this example, the black sensor device SENK is installed between the black first roller CR1K and the black second roller CR2K at a position closer to the black first roller CR1K than the black landing position PK. desirable.
なお、ブラック用第1ローラCR1Kに近づける距離は、制御動作に必要な時間等に基づいて定める。例えば、ブラック用第1ローラCR1Kに近づける距離は、「20mm」とする。この場合には、ブラック用センサデバイスSENKが設置される位置は、ブラック着弾位置PKより「20mm」上流側とする例である。 The distance close to the first roller CR1K for black is determined based on the time required for the control operation and the like. For example, the distance close to the first roller CR1K for black is set to "20 mm". In this case, the position where the black sensor device SENK is installed is an example in which the position is "20 mm" upstream from the black landing position PK.
なお、図3では、ブラック用センサデバイスSENKの位置がウェブ120のエッジにあるように記載されているが、ブラック用センサデバイスSENKの位置は、ウェブ120のエッジでなく、ウェブ120の面に垂直な方向にみたときに、ウェブ120と完全に重なる位置にあっても良い。
In FIG. 3, the position of the black sensor device SENK is described as being on the edge of the
また、液体を吐出する装置110は、エンコーダ等の計測部を更に備えてもよい。以下、計測部がエンコーダによって実現される例で説明する。具体的には、エンコーダは、例えば、ローラ230が有する回転軸に対して設置される。このようにすると、ローラ230の回転量に基づいて搬送方向における移動量を計測できる。この計測結果を被搬送物検知センサによる出力データと併せて利用すると、より精度良く、液体を吐出する装置110は、ウェブ120に対して液体を吐出できる。
Further, the
また、液体を吐出する装置110は、ヘッドユニット毎に、各ヘッドユニットの搬送方向に直交する直交方向の変位量を求める変位センサPSを有する。具体的には、液体を吐出する装置110は、ブラック液体吐出ヘッドユニット210Kの変位量を検知する第1変位センサPS1、シアン液体吐出ヘッドユニット210Cの変位量を検知する第2変位センサPS2、マゼンタ液体吐出ヘッドユニット210Mの変位量を検知する第3変位センサPS3、イエロー液体吐出ヘッドユニット210Yの変位量を検知する第4変位センサPS4を備える。
Further, the
第1変位センサPS1、第2変位センサPS2、第3変位センサPS3及び第4変位センサPS4は、各変位量を検出できる位置センサである。例えば、第1変位センサPS1、第2変位センサPS2、第3変位センサPS3及び第4変位センサPS4は、レーザ光による反射方式又はスリット若しくはリニアスケールによるパルス数をカウントする方式等である。 The first displacement sensor PS1, the second displacement sensor PS2, the third displacement sensor PS3, and the fourth displacement sensor PS4 are position sensors capable of detecting each displacement amount. For example, the first displacement sensor PS1, the second displacement sensor PS2, the third displacement sensor PS3, and the fourth displacement sensor PS4 are a reflection method using a laser beam or a method for counting the number of pulses by a slit or a linear scale.
又は、第1変位センサPS1、第2変位センサPS2、第3変位センサPS3及び第4変位センサPS4は、光学センサ、加速度センサ、エンコーダ、ポテンショメータ、CIS(コンタクトイメージセンサ)又はこれらの組み合わせ等でもよい。 Alternatively, the first displacement sensor PS1, the second displacement sensor PS2, the third displacement sensor PS3, and the fourth displacement sensor PS4 may be an optical sensor, an acceleration sensor, an encoder, a potentiometer, a CIS (contact image sensor), or a combination thereof. ..
このように、変位センサは、搬送方向、直交方向又は両方向において、各液体吐出ヘッドユニットの変位等を検出できるセンサである。したがって、変位センサは、変位等を検出できるセンサであれば、どのような種類のセンサでもよい。 As described above, the displacement sensor is a sensor capable of detecting the displacement of each liquid discharge head unit in the transport direction, the orthogonal direction, or both directions. Therefore, the displacement sensor may be any kind of sensor as long as it can detect displacement and the like.
<液体吐出ヘッドユニットの外形形状>
液体吐出ヘッドユニットの外形形状の一例を、図4を用いて説明する。図示するように、図4(a)は、本発明の実施形態に係る液体を吐出する装置110の4つの液体吐出ヘッドユニット210K~210Yの一例を示す概略平面図である。
<External shape of liquid discharge head unit>
An example of the outer shape of the liquid discharge head unit will be described with reference to FIG. As shown in the figure, FIG. 4A is a schematic plan view showing an example of four liquid
図4(a)に示すように、液体吐出ヘッドユニットは、本実施形態では、ライン型のヘッドユニットである。すなわち、液体を吐出する装置110は、記録媒体の搬送方向10の上流側からブラック(K)、シアン(C)、マゼンタ(M)及びイエロー(Y)に対応する4つの液体吐出ヘッドユニット210K、210C、210M及び210Yを配置する。
As shown in FIG. 4A, the liquid discharge head unit is a line type head unit in this embodiment. That is, the
この例では、ブラック(K)の液体吐出ヘッドユニット210Kは、直交方向に、4つのヘッド210K-1、210K-2、210K-3及び210K-4を千鳥状に配置する。これにより、液体を吐出する装置110は、ウェブ120の画像形成領域(印刷領域)の幅方向(直交方向)の全域に画像を形成することができる。なお、他の液体吐出ヘッドユニット210C、210M及び210Yの構成は、ブラック(K)の液体吐出ヘッドユニット210Kの構成と同様のため、説明を省略する。
In this example, the black (K) liquid
なお、この例では、4つのヘッドで液体吐出ヘッドユニットを構成する例を説明したが、単一のヘッドで液体吐出ヘッドユニットを構成しても良い。 In this example, the example in which the liquid discharge head unit is configured by four heads has been described, but the liquid discharge head unit may be configured by a single head.
図5は、本発明の一実施形態に係るセンサデバイスの一例を示す外観図である。 FIG. 5 is an external view showing an example of a sensor device according to an embodiment of the present invention.
図示するセンサデバイスSENは、ウェブ120等の対象物に対して照明を当て、スペックルパターンを形成する構成を有する。具体的には、センサデバイスSENは、半導体レーザ光源(LD)と、コリメート光学系(CL)を有する。
The illustrated sensor device SEN has a configuration in which an object such as a
また、センサデバイスSENは、スペックルパターンの画像を撮像するため、被搬送物検知センサWSの例であるCMOSイメージセンサと、CMOSイメージセンサにスペックルパターンを集光結像するため、テレセントリック撮像光学系(TO)とを有する。 In addition, the sensor device SEN has a CMOS image sensor, which is an example of the object detection sensor WS, to capture an image of the speckle pattern, and a telecentric imaging optics to condense and image the speckle pattern on the CMOS image sensor. It has a system (TO).
スペックルパターンについては後述する。 The speckle pattern will be described later.
図示する構成の例では、異なるセンサデバイスSENの備えるCMOSイメージセンサが、例えば、時刻「TM1」と、時刻「TM2」との各々において、それぞれスペックルパターンが写る画像を撮像する。また、同じCMOSイメージセンサが、離間した時刻TM1と時刻TM2のそれぞれにおいて、パターン等を示す画像を撮像しても良い。 In the illustrated configuration example, a CMOS image sensor provided with different sensor devices SEN captures an image in which a speckle pattern is captured at each of the time “TM1” and the time “TM2”, for example. Further, the same CMOS image sensor may capture an image showing a pattern or the like at each of the time TM1 and the time TM2 separated from each other.
なお、図示する例は、センサのサイズ 幅W×奥行きD×高さHを15×60×32[mm]とする例である。 In the illustrated example, the size width W × depth D × height H of the sensor is 15 × 60 × 32 [mm].
上述したように、CMOSイメージセンサは、被搬送物検知センサWSの一例であり、制御回路52は、後述する撮像制御部14A及び14Bの一例である。例えば、制御回路52は、FPGA(Field-Programable Gate Array)回路である。また、光源は、レーザ光を用いる装置に限られない。例えば、光源は、LED(Light Emitting Diode)又は有機EL(Electro-Luminescence)等でもよい。そして、光源の種類によっては、パターンは、スペックルパターンでなくともよい。
As described above, the CMOS image sensor is an example of the transported object detection sensor WS, and the
図6は、本発明の一実施形態に係る液体を吐出する装置が有する被搬送物検知センサの配置例を示す模式図である。例えば、ブラック用センサデバイスSENKに備えられた被搬送物検知センサWSを第1被搬送物検知センサWS1とする。また、シアン用センサデバイスSENCに備えられた被搬送物検知センサを第2被搬送物検知センサWS2とする。さらに、マゼンタ用センサデバイスSENMに備えられた被搬送物検知センサを第3被搬送物検知センサとする。さらにまた、イエロー用センサデバイスSENYに備えられた被搬送物検知センサを第4被搬送物検知センサとする。 FIG. 6 is a schematic diagram showing an arrangement example of a transported object detection sensor included in the device for discharging the liquid according to the embodiment of the present invention. For example, the transported object detection sensor WS provided in the black sensor device SENK is referred to as the first transported object detection sensor WS1. Further, the transported object detection sensor provided in the cyan sensor device SENC is referred to as a second transported object detection sensor WS2. Further, the transported object detection sensor provided in the magenta sensor device SENM is referred to as a third transported object detection sensor. Furthermore, the transported object detection sensor provided in the yellow sensor device SENY is used as the fourth transported object detection sensor.
そして、第1被搬送物検知センサWS1、第2被搬送物検知センサWS2、第3被搬送物検知センサWS3及び第4被搬送物検知センサWS4は、図示するようなウェブ120が検出できる位置に配置される。
Then, the first transported object detection sensor WS1, the second transported object detection sensor WS2, the third transported object detection sensor WS3, and the fourth transported object detection sensor WS4 are located at positions where the
図5に示すセンサデバイスSENの場合、ウェブ120の表面に垂直な方向に透視したときに、ウェブ120と各センサデバイスが備える被搬送物検知センサWSの検出領域とが、少なくとも一部が重なる配置であるのが望ましい。
In the case of the sensor device SEN shown in FIG. 5, at least a part of the detection region of the transported object detection sensor WS included in each sensor device overlaps with the
なお、図6の各液体吐出ヘッドユニット210に設けられたアクチュエータAC1、AC2、AC3、AC4については後述する。
The actuators AC1, AC2, AC3, and AC4 provided in each liquid
また、ブラック液体吐出ヘッドユニット210Kを搬送方向10と直交する方向に移動させない場合、アクチュエータAC1は、省略されても良い。
Further, when the black liquid
図7は、本発明の一実施形態に係る検出結果を求める機能構成の一例を示す機能ブロック図である。 FIG. 7 is a functional block diagram showing an example of a functional configuration for obtaining a detection result according to an embodiment of the present invention.
以下、図示するように、液体吐出ヘッドユニット210ごとに設置されるセンサデバイスのうち、ブラック液体吐出ヘッドユニット210Kに対応するブラック用センサデバイスSENK及びシアン液体吐出ヘッドユニット210Cに対応するシアン用センサデバイスSENCの組み合わせを例に説明する。
As shown below, among the sensor devices installed for each liquid
この例では、センサデバイスSENは、図に示す検出部の機能を有するハードウェアである。 In this example, the sensor device SEN is hardware having the function of the detection unit shown in the figure.
また、図示するように、ブラック液体吐出ヘッドユニット210K用の検出部110F10が「A位置」に係る出力データを出力し、シアン液体吐出ヘッドユニット210C用の検出部110F10が「B位置」に係る出力データを出力する例で説明する。
Further, as shown in the figure, the detection unit 110F10 for the black liquid
まず、ブラック液体吐出ヘッドユニット210K用の検出部110F10は、例えば、撮像部16A、撮像制御部14A及び画像記憶部15A等で構成される。
First, the detection unit 110F10 for the black liquid
なお、この例では、シアン液体吐出ヘッドユニット210C用の検出部110F10は、例えば、ブラック液体吐出ヘッドユニット210K用の検出部110F10と同様の構成であり、撮像部16B、撮像制御部14B及び画像記憶部15B等で構成される。以下、ブラック液体吐出ヘッドユニット210K用の検出部110F10(以下単に「検出部110F10」という。)を例に説明する。
In this example, the detection unit 110F10 for the cyan liquid
撮像部16Aは、図示するように、搬送方向10に搬送されるウェブ120を撮像する。なお、撮像部16Aは、例えば、図5に示す被搬送物検知センサWS等によって実現される。
As shown in the figure, the
撮像制御部14Aは、シャッタ制御部141A、画像取込部142Aを有する。なお、撮像制御部14Aは、例えば、図5に示す制御回路52等によって実現される。
The image
画像取込部142Aは、撮像部16Aによって撮像される画像を取得する。
The image capture unit 142A acquires an image captured by the
シャッタ制御部141Aは、撮像部16Aが撮像するタイミングを制御する。
The
画像記憶部15Aは、撮像制御部14Aが取り込んだ画像を記憶する。なお、画像記憶部15Aは、例えば、記憶装置等によって実現される。
The
計算部110F60は、画像記憶部15A及び15Bに記憶されるそれぞれの画像に基づいて、ウェブ120が有するパターンの位置、ウェブ120が搬送される移動速度及びウェブ120が搬送される移動量を算出可能に構成される。
The calculation unit 110F60 can calculate the position of the pattern possessed by the
本実施形態では、計算部110F60は、計算結果に基づいて、各アクチュエータを駆動する指令値COMを算出する。指令値COMについては後述する。また、計算部110F60は、シャッタ制御部141Aに、シャッタを切るタイミングを示す時差Δtのデータを出力する。すなわち、計算部110F60は、「A位置」を示す画像と、「B位置」を示す画像とが時差Δtで、それぞれ撮像されるように、シャッタを切るタイミングをシャッタ制御部141Aに出力する。なお、計算部110F60は、例えば、図2に示すコントローラ520等によって実現される。
In the present embodiment, the calculation unit 110F60 calculates the command value COM for driving each actuator based on the calculation result. The command value COM will be described later. Further, the calculation unit 110F60 outputs data of a time difference Δt indicating the timing of releasing the shutter to the
ウェブ120は、表面又は内部に散乱性を有する部材である。そのため、ウェブ120にレーザ光が照射されると、反射光が拡散反射する。この拡散反射によって、ウェブ120には、パターンが形成される。すなわち、パターンは、「スペックル」と呼ばれる斑点、いわゆるスペックルパターンである。そのため、ウェブ120を撮像すると、スペックルパターンを示す画像が得られる。この画像からスペックルパターンのある位置がわかるため、ウェブ120の所定の位置がどこにあるかが検出できる。なお、このスペックルパターンは、ウェブ120の表面又は内部に形成される凹凸形状によって、照射されるレーザ光が干渉するため、生成される。
The
したがって、ウェブ120が搬送されると、ウェブ120が有するスペックルパターンも一緒に搬送される。そのため、同一のスペックルパターンを異なる時間でそれぞれ検出すると、移動量が求められる。すなわち、同一のスペックルパターンを検出してパターンの移動量が求まると、計算部110F60は、ウェブ120の移動量を求めることができる。この求まる移動量を単位時間あたりに換算すると、計算部110F60は、ウェブ120が移動した移動速度を求めることができる。
Therefore, when the
なお、求められる移動量又は移動速度は、ウェブ120の搬送方向に限らない。つまり、撮像部16Aが2次元の画像データを出力しているため、計算部110F60は、2次元における移動量又は移動速度を求めることが可能である。すなわち、センサは、搬送方向及び搬送方向に対して直交する方向のそれぞれの位置を検出するのに兼用されてもよい。このように兼用されると、それぞれの方向についてコストが少なくできる。また、センサの数が少なくできるので、省スペースとすることもできる。
The required movement amount or movement speed is not limited to the transport direction of the
このように、スペックルパターンに基づいて、液体を吐出する装置は、精度良く、直交方向において、ウェブ120の位置を示す検出結果を求めることができる。
As described above, the device for discharging the liquid based on the speckle pattern can accurately obtain the detection result indicating the position of the
計算部110F60は、以下のような相関演算を用いてウェブ120の位置、移動速度、移動量又はその組み合わせである検出結果を演算する。また、計算部110F60は、検出結果から指令値COMを算出する。そして、第1指令値COM1及び第2指令値COM2が入力されるアクチュエータコントローラCTL1、CTL2は、それぞれアクチュエータAC1、AC2を制御するコントローラである。アクチュエータコントローラCTL1、CTL2については後述する。
The calculation unit 110F60 calculates the detection result which is the position, the moving speed, the moving amount, or a combination thereof of the
<相関演算例>
図8は、本発明の一実施形態に係る相関演算方法の一例を示す構成図である。例えば、計算部110F60は、図示するような構成によって、相関演算を行うと、画像データが撮像された位置におけるウェブ120の直交方向の相対位置、移動量、移動速度又はこれらの組み合わせ等を演算することができる。また、画像データが撮像されたタイミングにおけるウェブ120の理想の搬送位置からのずれ量、移動速度等を計算することができる。
<Correlation operation example>
FIG. 8 is a block diagram showing an example of a correlation calculation method according to an embodiment of the present invention. For example, when the correlation calculation is performed by the configuration as shown in the figure, the calculation unit 110F60 calculates the relative position, the movement amount, the movement speed, or a combination thereof in the orthogonal direction of the
具体的には、計算部110F60は、図示するように、第1の2次元フーリエ変換部FT1、第2の2次元フーリエ変換部FT2、相関画像データ生成部DMK、ピーク位置探索部SR、演算部CAL及び変換結果記憶部MEMを有する構成である。 Specifically, as shown in the figure, the calculation unit 110F60 includes a first two-dimensional Fourier transform unit FT1, a second two-dimensional Fourier transform unit FT2, a correlation image data generation unit DMK, a peak position search unit SR, and a calculation unit. It has a CAL and a conversion result storage unit MEM.
第1の2次元フーリエ変換部FT1は、第1画像データD1を変換する。具体的には、第1の2次元フーリエ変換部FT1は、直交方向用のフーリエ変換部FT1a及び搬送方向用のフーリエ変換部FT1bを有する構成である。 The first two-dimensional Fourier transform unit FT1 converts the first image data D1. Specifically, the first two-dimensional Fourier transform unit FT1 has a configuration including a Fourier transform unit FT1a for the orthogonal direction and a Fourier transform unit FT1b for the transport direction.
直交方向用のフーリエ変換部FT1aは、直交方向に、第1画像データD1を1次元フーリエ変換する。そして、搬送方向用のフーリエ変換部FT1bは、直交方向用のフーリエ変換部FT1aによる変換結果に基づいて、搬送方向に、第1画像データD1を1次元フーリエ変換する。このようにして、直交方向用のフーリエ変換部FT1a及び搬送方向用のフーリエ変換部FT1bが、直交方向及び搬送方向に、それぞれ1次元フーリエ変換する。このようにして変換された変換結果を、第1の2次元フーリエ変換部FT1は、相関画像データ生成部DMKに出力する。 The Fourier transform unit FT1a for the orthogonal direction performs a one-dimensional Fourier transform on the first image data D1 in the orthogonal direction. Then, the Fourier transform unit FT1b for the transport direction performs one-dimensional Fourier transform of the first image data D1 in the transport direction based on the conversion result by the Fourier transform unit FT1a for the orthogonal direction. In this way, the Fourier transform unit FT1a for the orthogonal direction and the Fourier transform unit FT1b for the transport direction perform one-dimensional Fourier transform in the orthogonal direction and the transport direction, respectively. The first two-dimensional Fourier transform unit FT1 outputs the conversion result converted in this way to the correlation image data generation unit DMK.
同様に、第2の2次元フーリエ変換部FT2は、第2画像データD2を変換する。具体的には、第2の2次元フーリエ変換部FT2は、直交方向用のフーリエ変換部FT2a、搬送方向用のフーリエ変換部FT2b及び複素共役部FT2cを有する構成である。 Similarly, the second two-dimensional Fourier transform unit FT2 transforms the second image data D2. Specifically, the second two-dimensional Fourier transform unit FT2 has a configuration including a Fourier transform unit FT2a for the orthogonal direction, a Fourier transform unit FT2b for the transport direction, and a complex conjugate unit FT2c.
直交方向用のフーリエ変換部FT2aは、直交方向に、第2画像データD2を1次元フーリエ変換する。そして、搬送方向用のフーリエ変換部FT2bは、直交方向用のフーリエ変換部FT2aによる変換結果に基づいて、搬送方向に、第2画像データD2を1次元フーリエ変換する。このようにして、直交方向用のフーリエ変換部FT2a及び搬送方向用のフーリエ変換部FT2bが、直交方向及び搬送方向に、それぞれ1次元フーリエ変換する。 The Fourier transform unit FT2a for the orthogonal direction performs a one-dimensional Fourier transform on the second image data D2 in the orthogonal direction. Then, the Fourier transform unit FT2b for the transport direction performs one-dimensional Fourier transform of the second image data D2 in the transport direction based on the conversion result by the Fourier transform unit FT2a for the orthogonal direction. In this way, the Fourier transform unit FT2a for the orthogonal direction and the Fourier transform unit FT2b for the transport direction perform one-dimensional Fourier transform in the orthogonal direction and the transport direction, respectively.
次に、複素共役部FT2cは、直交方向用のフーリエ変換部FT2a及び搬送方向用のフーリエ変換部FT2bによる変換結果の複素共役を計算する。そして、複素共役部FT2cが計算した複素共役を、第2の2次元フーリエ変換部FT2は、相関画像データ生成部DMKに出力する。 Next, the complex conjugate unit FT2c calculates the complex conjugate of the conversion result by the Fourier transform unit FT2a for the orthogonal direction and the Fourier transform unit FT2b for the transport direction. Then, the second two-dimensional Fourier transform unit FT2 outputs the complex conjugate calculated by the complex conjugate unit FT2c to the correlation image data generation unit DMK.
続いて、相関画像データ生成部DMKは、第1の2次元フーリエ変換部FT1から出力される第1画像データD1の変換結果と、第2の2次元フーリエ変換部FT2から出力される第2画像データD2の変換結果とに基づいて、相関画像データを生成する。 Subsequently, the correlated image data generation unit DMK has the conversion result of the first image data D1 output from the first two-dimensional Fourier transform unit FT1 and the second image output from the second two-dimensional Fourier transform unit FT2. Correlated image data is generated based on the conversion result of the data D2.
相関画像データ生成部DMKは、積算部DMKa及び2次元逆フーリエ変換部DMKbを有する構成である。 The correlation image data generation unit DMK has a configuration including an integration unit DMKa and a two-dimensional inverse Fourier transform unit DMKb.
積算部DMKaは、第1画像データD1の変換結果と、第2画像データD2の変換結果とを積算する。そして、積算部DMKaは、積算結果を2次元逆フーリエ変換部DMKbに出力する。 The integration unit DMKa integrates the conversion result of the first image data D1 and the conversion result of the second image data D2. Then, the integration unit DMKa outputs the integration result to the two-dimensional inverse Fourier transform unit DMKb.
2次元逆フーリエ変換部DMKbは、積算部DMKaによる積算結果を2次元逆フーリエ変換する。このように、2次元逆フーリエ変換が行われると、相関画像データが生成される。そして、2次元逆フーリエ変換部DMKbは、相関画像データをピーク位置探索部SRに出力する。 The two-dimensional inverse Fourier transform unit DMKb performs a two-dimensional inverse Fourier transform on the integration result by the integration unit DMKa. When the two-dimensional inverse Fourier transform is performed in this way, the correlated image data is generated. Then, the two-dimensional inverse Fourier transform unit DMKb outputs the correlation image data to the peak position search unit SR.
ピーク位置探索部SRは、生成された相関画像データにおいて、最も急峻となる(すなわち、立ち上がりが急になる。)ピーク輝度(ピーク値)があるピーク位置を探索する。まず、相関画像データには、光の強さ、すなわち、輝度の大きさを示す値が入力される。また、輝度は、マトリクス状に入力される。 The peak position search unit SR searches for a peak position having a peak brightness (peak value) that has the steepest (that is, a steep rise) in the generated correlated image data. First, a value indicating the intensity of light, that is, the magnitude of brightness is input to the correlated image data. The brightness is input in a matrix.
なお、相関画像データでは、輝度は、エリアセンサの画素ピッチ間隔、すなわち、画素サイズ間隔で並ぶ。そのため、ピーク位置の探索は、いわゆるサブピクセル処理を行ってから、探索が行われるのが望ましい。このように、サブピクセル処理が行われると、ピーク位置が精度良く探索できる。そのため、計算部110F60は、位置、移動量及び移動速度等を精度良く出力できる。 In the correlated image data, the luminance is arranged at the pixel pitch interval of the area sensor, that is, the pixel size interval. Therefore, it is desirable that the search for the peak position is performed after performing so-called subpixel processing. In this way, when the sub-pixel processing is performed, the peak position can be searched with high accuracy. Therefore, the calculation unit 110F60 can accurately output the position, the movement amount, the movement speed, and the like.
例えば、ピーク位置探索部SRによる探索は、以下のように行われる。 For example, the search by the peak position search unit SR is performed as follows.
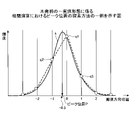
図9は、本発明の一実施形態に係る相関演算におけるピーク位置の探索方法の一例を示す図である。図では、横軸は、相関画像データが示す画像における搬送方向の位置を示す。一方で、縦軸は、相関画像データが示す画像の輝度を示す。 FIG. 9 is a diagram showing an example of a method for searching for a peak position in a correlation calculation according to an embodiment of the present invention. In the figure, the horizontal axis indicates the position in the transport direction in the image indicated by the correlation image data. On the other hand, the vertical axis indicates the brightness of the image indicated by the correlation image data.
以下、相関画像データが示す輝度のうち、第1データ値q1、第2データ値q2及び第3データ値q3の3つのデータを例に説明する。つまり、この例では、ピーク位置探索部SR(図8)は、第1データ値q1、第2データ値q2及び第3データ値q3を繋ぐ曲線kにおけるピーク位置Pを探索する。 Hereinafter, among the brightnesses indicated by the correlated image data, three data of the first data value q1, the second data value q2, and the third data value q3 will be described as an example. That is, in this example, the peak position search unit SR (FIG. 8) searches for the peak position P on the curve k connecting the first data value q1, the second data value q2, and the third data value q3.
まず、ピーク位置探索部SRは、相関画像データが示す画像の輝度の各差分を計算する。そして、ピーク位置探索部SRは、計算した差分のうち、最も差分の値が大きくなるデータ値の組み合わせを抽出する。次に、ピーク位置探索部SRは、最も差分の値が大きくなるデータ値の組み合わせに隣接する組み合わせを抽出する。このようにすると、図示する、第1データ値q1、第2データ値q2及び第3データ値q3のように、ピーク位置探索部SRは、3つのデータを抽出できる。そして、抽出される3つのデータを繋いで曲線kを算出すると、ピーク位置探索部SRは、ピーク位置Pを探索できる。このようにすると、ピーク位置探索部SRは、サブピクセル処理等の演算量を少なくし、より高速にピーク位置Pを探索できる。なお、最も差分の値が大きくなるデータ値の組み合わせの位置が、最も急峻な位置となる。また、サブピクセル処理は、上記の処理以外の処理でもよい。 First, the peak position search unit SR calculates each difference in the brightness of the image indicated by the correlation image data. Then, the peak position search unit SR extracts a combination of data values having the largest difference value among the calculated differences. Next, the peak position search unit SR extracts a combination adjacent to the combination of data values having the largest difference value. In this way, the peak position search unit SR can extract three data as shown in the illustrated first data value q1, second data value q2, and third data value q3. Then, when the curve k is calculated by connecting the three extracted data, the peak position search unit SR can search for the peak position P. By doing so, the peak position search unit SR can search for the peak position P at a higher speed by reducing the amount of calculation such as sub-pixel processing. The position of the combination of data values having the largest difference value is the steepest position. Further, the sub-pixel processing may be processing other than the above processing.
以上のように、ピーク位置探索部SRがピーク位置を探索すると、例えば、以下のような演算結果が得られる。 As described above, when the peak position search unit SR searches for the peak position, for example, the following calculation result can be obtained.
図10は、本発明の一実施形態に係る相関演算の演算結果例を示す図である。図は、相互相関関数の相関強度分布を示す。なお、図では、X軸及びY軸は、画素の通し番号を示す。図示する「相関ピーク」のようなピーク位置が、ピーク位置探索部SR(図8)によって探索される。 FIG. 10 is a diagram showing an example of a calculation result of a correlation calculation according to an embodiment of the present invention. The figure shows the correlation intensity distribution of the cross-correlation function. In the figure, the X-axis and the Y-axis indicate the serial numbers of the pixels. A peak position such as the illustrated "correlation peak" is searched by the peak position search unit SR (FIG. 8).
また、演算部CAL(図8)は、ウェブの相対位置、移動量又は移動速度等を演算する。例えば、演算部CALは、相関画像データの中心位置と、ピーク位置探索部SRによって探索されるピーク位置との差を計算すると、相対位置及び移動量を演算することができる。 In addition, the calculation unit CAL (FIG. 8) calculates the relative position, movement amount, movement speed, and the like of the web. For example, the calculation unit CAL can calculate the relative position and the movement amount by calculating the difference between the center position of the correlated image data and the peak position searched by the peak position search unit SR.
また、演算部CALは、例えば、移動量を時間で除算して移動速度を計算できる。 Further, the calculation unit CAL can calculate the movement speed by dividing the movement amount by time, for example.
以上のようにして、計算部110F60は、相関演算によって、相対位置、移動量又は移動速度等を検出できる。なお、図では、Y方向に変動がある例を説明したが、X方向に変動がある場合には、ピーク位置は、X方向にもずれた位置に発生する。また、相対位置、移動量又は移動速度等の検出方法は、これに限定されない。例えば、計算部110F60は、以下のように、相対位置、移動量又は移動速度等を検出してもよい。 As described above, the calculation unit 110F60 can detect the relative position, the movement amount, the movement speed, and the like by the correlation calculation. In the figure, an example in which there is a fluctuation in the Y direction has been described, but when there is a fluctuation in the X direction, the peak position is generated at a position shifted in the X direction as well. Further, the detection method such as relative position, movement amount or movement speed is not limited to this. For example, the calculation unit 110F60 may detect a relative position, a movement amount, a movement speed, or the like as follows.
まず、計算部110F60は、第1画像データ及び第2画像データのそれぞれの輝度を2値化する。すなわち、計算部110F60は、輝度があらかじめ設定される閾値以下であれば、「0」とし、一方で、輝度が閾値より大きい値であると、「1」とする。このように2値化された第1画像データ及び第2画像データを比較して、計算部110F60は、相対位置を検出してもよい。 First, the calculation unit 110F60 binarizes the brightness of each of the first image data and the second image data. That is, the calculation unit 110F60 sets "0" if the luminance is equal to or less than the preset threshold, and "1" if the luminance is larger than the threshold. The calculation unit 110F60 may detect the relative position by comparing the first image data and the second image data binarized in this way.
また、計算部110F60は、これ以外の検出方法によって、相対位置、移動量又は移動速度等を検出してもよい。例えば、計算部110F60は、いわゆるパターンマッチング処理等によって、各画像データに写るそれぞれのパターンから相対位置を検出してもよい。 Further, the calculation unit 110F60 may detect a relative position, a movement amount, a movement speed, or the like by another detection method. For example, the calculation unit 110F60 may detect a relative position from each pattern reflected in each image data by so-called pattern matching processing or the like.
図11は、直交方向において記録媒体の位置が変動する例を示す図である。以下、図11(A)に示すようにウェブ120が搬送方向10に搬送される例で説明する。この例で示すように、ウェブ120は、ローラ等によって搬送される。このように、ウェブ120が搬送されると、ウェブ120は、例えば、図11(B)に示すように、直交方向において位置が変動する場合がある。すなわち、ウェブ120は、図11(B)に示すように、「蛇行」する場合がある。
FIG. 11 is a diagram showing an example in which the position of the recording medium fluctuates in the orthogonal direction. Hereinafter, an example in which the
なお、図示する例は、ローラが斜めに配置されてしまった場合である。図では、「斜め」となっている状態を分かりやすく記載しており、ローラの傾き等は、図示する例より少ない場合等でもよい。 The example shown in the figure is a case where the rollers are arranged diagonally. In the figure, the state of being “oblique” is described in an easy-to-understand manner, and the inclination of the rollers and the like may be less than in the illustrated example.
直交方向におけるウェブ120の位置の変動、すなわち、「蛇行」は、例えば、搬送に係るローラの偏心、ミスアライメント又はブレードによるウェブ120の切断等によって発生する。また、ウェブ120が直交方向に対して幅が狭い場合等には、ローラの熱膨張等が、直交方向におけるウェブ120の位置の変動に対して影響する場合もある。
Fluctuations in the position of the
例えば、ローラの偏心又はブレードの切断等によって、振動が発生すると、ウェブ120は、図示するように、「蛇行」する場合がある。他にも、ブレードによる切断が一様にならず、ウェブ120の物理的特性、すなわち、ウェブ120が切断された後の形状等によって、ウェブ120は、図示するように、「蛇行」する場合がある。
For example, when vibration is generated due to eccentricity of a roller, cutting of a blade, or the like, the
図12は、色ずれが起こる原因の一例を示す図である。図11で説明するように、直交方向において記録媒体の位置が変動、すなわち、「蛇行」が起こると図12に示す原因等によって、色ずれが起きやすい。 FIG. 12 is a diagram showing an example of the cause of color shift. As will be described with reference to FIG. 11, when the position of the recording medium fluctuates in the orthogonal direction, that is, when “meandering” occurs, color shift is likely to occur due to the cause shown in FIG.
具体的には、複数の色を用いて記録媒体に画像を形成する場合、すなわち、カラー画像が形成される場合には、図示するように、液体を吐出する装置は、各液体吐出ヘッドユニットが吐出する各色のインクを重ねて、いわゆるカラープレーンによるカラー画像をウェブ120上に形成する。
Specifically, when an image is formed on a recording medium using a plurality of colors, that is, when a color image is formed, as shown in the figure, each liquid ejection head unit is a device for ejecting a liquid. Ink of each color to be ejected is overlapped to form a color image by a so-called color plane on the
これに対して、図11で説明するような位置の変動がある。例えば、参照線320を基準に、「蛇行」が起きる場合がある。この場合において、各液体吐出ヘッドユニットが同一の位置に対してインクをそれぞれ吐出すると、液体吐出ヘッドユニットの間で「蛇行」によって、直交方向において、ウェブ120の位置が変動するため、色ずれ330が起きる場合がある。すなわち、色ずれ330は、各液体吐出ヘッドユニットが吐出するインクによって形成される線等が、直交方向において位置がずれるため起こる。このように、色ずれ330が起きると、ウェブ120に形成される画像の画質が劣化することがある。
On the other hand, there is a change in position as described with reference to FIG. For example, "meandering" may occur with reference to the
直交方向の位置ずれに対して、各液体吐出ヘッドユニット210に設けられた、各アクチュエータAC1、AC2、AC3、AC4を用いて各液体吐出ヘッドユニットを移動させる。
Each liquid discharge head unit is moved by using the actuators AC1, AC2, AC3, and AC4 provided in each liquid
図13は、本発明の一実施形態に係る液体を吐出する装置が有する液体吐出ヘッドユニットを移動させるための移動機構の一例を示すブロック図である。例えば、移動機構は、図示するようなハードウェア等によって実現される。図示する例は、シアン液体吐出ヘッドユニット210Cを移動させる移動機構の例である。
FIG. 13 is a block diagram showing an example of a moving mechanism for moving the liquid discharge head unit included in the device for discharging the liquid according to the embodiment of the present invention. For example, the moving mechanism is realized by hardware or the like as shown in the figure. The illustrated example is an example of a moving mechanism for moving the cyan liquid
まず、図示する例では、シアン液体吐出ヘッドユニット210Cを移動させるリニアアクチュエータ等のアクチュエータAC2が、シアン液体吐出ヘッドユニット210Cに設置される。そして、アクチュエータAC2には、アクチュエータAC2を制御するアクチュエータコントローラCTL2が接続される。
First, in the illustrated example, an actuator AC2 such as a linear actuator that moves the cyanide liquid
アクチュエータAC2は、例えば、リニアアクチュエータ又はモータを有する。また、アクチュエータAC2は、制御回路、電源回路及び機構部品等を有してもよい。具体的には、アクチュエータAC2は、サーボモータ等による回転運動をボールスクリュー機構等によって直線運動に変換する装置等である。 The actuator AC2 has, for example, a linear actuator or a motor. Further, the actuator AC2 may include a control circuit, a power supply circuit, a mechanical component, and the like. Specifically, the actuator AC2 is a device or the like that converts a rotary motion by a servomotor or the like into a linear motion by a ball screw mechanism or the like.
アクチュエータコントローラCTL2には、図7に示す計算部110F60による検出結果に基づいて算出される指令値COM又は補正指令値COM´が入力される。そして、アクチュエータコントローラCTL2は、指令値COM又は補正指令値COM´が示す位置に基づいて、すなわち、ウェブ120の変動を補償するように、アクチュエータAC2によって、シアン液体吐出ヘッドユニット210Cを移動させる制御を行う。アクチュエータコントローラCTL2の詳細については後述する。
A command value COM or a correction command value COM'calculated based on the detection result by the calculation unit 110F60 shown in FIG. 7 is input to the actuator controller CTL2. Then, the actuator controller CTL2 controls the movement of the cyan liquid
図14は、本発明の一実施形態に係る液体を吐出する装置による被搬送物の変動量を算出する方法の一例を示すタイミングチャートである。図示するように、計算部110F60(図7)は、複数の検出結果に基づいて、変動量を算出する。具体的には、第1センサデータS1及び第2センサデータS2に基づいて、計算部110F60は、変動量を示す算出結果を出力する。まず、第1センサデータS1及び第2センサデータS2は、図2に示す第1センサデバイスSEN1及び第2センサデバイスSEN2のうち、いずれか2つのセンサから、出力されるセンサデータである。次に、各センサデータに基づいて、計算部110F60は変動量を算出する。 FIG. 14 is a timing chart showing an example of a method of calculating the amount of fluctuation of the transported object by the device for discharging the liquid according to the embodiment of the present invention. As shown in the figure, the calculation unit 110F60 (FIG. 7) calculates the fluctuation amount based on a plurality of detection results. Specifically, the calculation unit 110F60 outputs a calculation result indicating the amount of fluctuation based on the first sensor data S1 and the second sensor data S2. First, the first sensor data S1 and the second sensor data S2 are sensor data output from any two sensors of the first sensor device SEN1 and the second sensor device SEN2 shown in FIG. Next, the calculation unit 110F60 calculates the fluctuation amount based on each sensor data.
変動量は、液体吐出ヘッドユニット210ごとに算出される。以下、シアン液体吐出ヘッドユニット210C(図2)用の変動量を算出する例で説明する。この例では、変動量は、例えば、シアン用センサデバイスSENC(図2)による検出結果と、シアン用センサデバイスSENCより1つ上流側に設置されるブラック用センサデバイスSENK(図2)によるセンサデータとに基づいて算出される。図14では、第1センサデータS1は、ブラック用センサデバイスSENKによる検出結果である。一方で、第2センサデータS2は、シアン用センサデバイスSENCによる検出結果である。
The amount of fluctuation is calculated for each liquid
ブラック用センサデバイスSENKと、シアン用センサデバイスSENCとの間隔、すなわち、センサ間の距離が、「L」であるとする。また、後述する速度検出回路SCRによって検出されるウェブ120の移動速度が、「V」であるとする。さらに、ブラック用センサデバイスSENKの位置からシアン用センサデバイスSENCの位置までウェブ120が搬送されるのにかかる移動時間が「T2」であるとする。この場合には、移動時間は、「T2=L/V」と算出される。
It is assumed that the distance between the black sensor device SENK and the cyan sensor device SENC, that is, the distance between the sensors is “L”. Further, it is assumed that the moving speed of the
また、センサによるサンプリング間隔を「A」とする。さらに、ブラック用センサデバイスSENKと、シアン用センサデバイスSENCとの間でのサンプリング回数を「n」とする。この場合には、サンプリング回数は、「n=T2/A」と算出される。 Further, the sampling interval by the sensor is set to "A". Further, the number of samplings between the black sensor device SENK and the cyan sensor device SENC is set to "n". In this case, the number of samplings is calculated as "n = T2 / A".
図示する算出結果、すなわち、変動量を「ΔX」とする。例えば、図示するように、検出周期が「0」である場合には、変動量は、移動時間「T2」前の第1センサデータS1と、検出周期「0」の第2センサデータS2とを比較して算出される。具体的には、変動量は、「ΔX=X2(0)-X1(n)」と算出される。そして、センサの位置が着弾位置よりも第1ローラに近い位置である場合には、計算部110F60は、センサの位置まで用紙が移動した場合の記録媒体の位置の変動を計算して指令値COMを出力する。すなわち、指令値COMは、変動量「ΔX」を補償するような値である。 The illustrated calculation result, that is, the fluctuation amount is defined as "ΔX". For example, as shown in the figure, when the detection cycle is "0", the fluctuation amount includes the first sensor data S1 before the travel time "T2" and the second sensor data S2 having the detection cycle "0". Calculated by comparison. Specifically, the fluctuation amount is calculated as "ΔX = X2 (0) −X1 (n)". Then, when the position of the sensor is closer to the first roller than the landing position, the calculation unit 110F60 calculates the change in the position of the recording medium when the paper moves to the position of the sensor, and the command value COM. Is output. That is, the command value COM is a value that compensates for the fluctuation amount “ΔX”.
次に、アクチュエータコントローラCTL2は、指令値COMに基づいて図13に示す第2アクチュエータAC2を制御し、図2に示すシアン液体吐出ヘッドユニット210Cを直交方向において、移動させる。
Next, the actuator controller CTL2 controls the second actuator AC2 shown in FIG. 13 based on the command value COM, and moves the cyanide liquid
このようにすると、被搬送物の位置が変動しても、液体を吐出する装置は、被搬送物に対して、画像を精度良く画像形成することができる。 In this way, even if the position of the transported object fluctuates, the device that discharges the liquid can accurately form an image on the transported object.
また、図示するように、2つの検出結果、すなわち、2つのセンサによる検出結果に基づいて、変動量を算出すると、各センサの位置情報を積算せずに、変動量が算出できる。そのため、このようにすると、各センサによる検出誤差の累積が少なくできる。 Further, as shown in the figure, when the fluctuation amount is calculated based on the two detection results, that is, the detection results by the two sensors, the fluctuation amount can be calculated without integrating the position information of each sensor. Therefore, by doing so, the accumulation of detection errors by each sensor can be reduced.
なお、変動量の算出は、他の液体吐出ヘッドユニットにおいて同様に行われてもよい。例えば、図2に示すブラック液体吐出ヘッドユニット210K用の変動量は、第2センサデバイスSEN2による第1センサデータS1と、ブラック用センサデバイスSENKによる第2センサデータS2とによって算出される。
The fluctuation amount may be calculated in the same manner in another liquid discharge head unit. For example, the fluctuation amount for the black liquid
同様に、マゼンタ液体吐出ヘッドユニット210M用の変動量は、シアン用センサデバイスSENCによる第1センサデータS1と、マゼンタ用センサデバイスSENMによる第2センサデータS2とによって算出される。さらに、イエロー液体吐出ヘッドユニット210Y用の変動量は、マゼンタ用センサデバイスSENMによる第1センサデータS1と、イエロー用センサデバイスSENYによる第2センサデータS2とによって算出される。
Similarly, the fluctuation amount for the magenta liquid
また、第1センサデータS1を出力する被搬送物検知センサWSは、移動させる液体吐出ヘッドユニットより1つ上流側に設置されるセンサデバイスに含まれる被搬送物検知センサに限られない。すなわち、第1センサデータS1は、移動させる液体吐出ヘッドユニットより上流側に設置される被搬送物検知センサWSによって検出されるデータであればよい。例えば、イエロー液体吐出ヘッドユニット210Y用の変動量は、第1センサデータS1に、第2センサデバイスSEN2、ブラック用センサデバイスSENK又はシアン用センサデバイスSENCのいずれかによるセンサデータが用いられて算出されてもよい。
Further, the transported object detection sensor WS that outputs the first sensor data S1 is not limited to the transported object detection sensor included in the sensor device installed on the upstream side of the liquid discharge head unit to be moved. That is, the first sensor data S1 may be data detected by the object to be detected sensor WS installed on the upstream side of the liquid discharge head unit to be moved. For example, the fluctuation amount for the yellow liquid
一方で、第2センサデータS2は、移動させる液体吐出ヘッドユニットに最も近い位置に設置されるセンサによる検出結果であるのが望ましい。 On the other hand, it is desirable that the second sensor data S2 is the detection result by the sensor installed at the position closest to the liquid discharge head unit to be moved.
また、変動量は、3つ以上の検出結果によって算出されてもよい。 Further, the fluctuation amount may be calculated based on three or more detection results.
このように、計算部110F60は、複数のセンサデータから算出される変動量に基づいて指令値COMを算出する。そして、アクチュエータコントローラCTL2は、指令値COMに基づいて液体吐出ヘッドユニットを移動させる制御を行う。その後、ウェブに対して、液体が吐出されると、画像等が、記録媒体に形成される。 In this way, the calculation unit 110F60 calculates the command value COM based on the fluctuation amount calculated from the plurality of sensor data. Then, the actuator controller CTL2 controls to move the liquid discharge head unit based on the command value COM. After that, when the liquid is ejected to the web, an image or the like is formed on the recording medium.
図2に示すコントローラ520は、例えば、以下に説明する構成である。
The
図15は、本発明の一実施形態に係る制御部のハードウェア構成の一例を示すブロック図である。例えば、コントローラ520は、情報処理装置等である上位装置71と、プリンタ装置72とを有する。図示する例では、コントローラ520は、上位装置71に入力される画像データ及び制御データに基づいて、プリンタ装置72に、記録媒体に対して画像を画像形成させる。
FIG. 15 is a block diagram showing an example of the hardware configuration of the control unit according to the embodiment of the present invention. For example, the
上位装置71は、例えば、PC(Personal Computer)等である。また、プリンタ装置72は、プリンタコントローラ72C及びプリンタエンジン72Eを有する。
The
プリンタコントローラ72Cは、プリンタエンジン72Eの動作を制御する。まず、プリンタコントローラ72Cは、上位装置71と、制御線70LCを介して制御データを送受信する。さらに、プリンタコントローラ72Cは、プリンタエンジン72Eと、制御線72LCを介して制御データを送受信する。この制御データの送受信によって、制御データが示す各種印刷条件等がプリンタコントローラ72Cに入力され、プリンタコントローラ72Cは、レジスタ等によって、印刷条件等を記憶する。次に、プリンタコントローラ72Cは、制御データに基づいて、プリンタエンジン72Eを制御し、印刷ジョブデータ、すなわち、制御データに従って画像形成を行う。
The printer controller 72C controls the operation of the
プリンタコントローラ72Cは、CPU72Cp、印刷制御装置72Cc及び記憶装置72Cmを有する。なお、CPU72Cp及び印刷制御装置72Ccは、バス72Cbによって接続され、相互に通信を行う。また、バス72Cbは、通信I/F(interface)等を介して、制御線70LCに接続される。 The printer controller 72C has a CPU 72Cp, a print control device 72Cc, and a storage device 72Cm. The CPU 72Cp and the print control device 72Cc are connected by a bus 72Cb and communicate with each other. Further, the bus 72Cb is connected to the control line 70LC via a communication I / F (interface) or the like.
CPU72Cpは、制御プログラム等によって、プリンタ装置72全体の動作を制御させる。すなわち、CPU72Cpは、演算装置及び制御装置である。
The CPU 72Cp controls the operation of the
印刷制御装置72Ccは、上位装置71から送信される制御データに基づいて、プリンタエンジン72Eと、コマンド又はステータス等を示すデータを送受信する。これにより、印刷制御装置72Ccは、プリンタエンジン72Eを制御する。さらに、図8に示す計算部110F60は、例えば、CPU72Cp等によって実現される。なお、計算部110F60は、他の演算装置及び記憶装置で実現されてもよい。
The print control device 72Cc transmits / receives data indicating a command, status, or the like to / from the
プリンタエンジン72Eには、データ線70LD-C、70LD-M、70LD-Y及び70LD-K、すなわち、複数のデータ線が接続される。そして、プリンタエンジン72Eは、複数のデータ線を介して、上位装置71から画像データを受信する。次に、プリンタエンジン72Eは、プリンタコントローラ72Cによる制御に基づいて、各色の画像形成を行う。
Data lines 70LD-C, 70LD-M, 70LD-Y and 70LD-K, that is, a plurality of data lines are connected to the
プリンタエンジン72Eは、データ管理装置72EC、72EM、72EY及び72EK、すなわち、複数のデータ管理装置を有する。また、プリンタエンジン72Eは、画像出力装置72Ei及び搬送制御装置72Ecを有する。
The
図16は、本発明の一実施形態に係る制御部が有するデータ管理装置のハードウェア構成の一例を示すブロック図である。例えば、複数のデータ管理装置は、同一の構成である。以下、各データ管理装置が同一の構成である例で説明し、データ管理装置72ECを例に説明する。したがって、重複する説明は、省略する。 FIG. 16 is a block diagram showing an example of the hardware configuration of the data management device included in the control unit according to the embodiment of the present invention. For example, a plurality of data management devices have the same configuration. Hereinafter, an example in which each data management device has the same configuration will be described, and the data management device 72EC will be described as an example. Therefore, duplicate description will be omitted.
データ管理装置72ECは、ロジック回路72EClと、記憶装置72ECmとを有する。図示するように、ロジック回路72EClは、データ線70LD-Cを介して上位装置71と接続される。また、ロジック回路72EClは、制御線72LCを介して印刷制御装置72Ccと接続される。なお、ロジック回路72EClは、ASIC(Application Specific Integrated Circuit)又はPLD(Programmable Logic Device)等で実現される。
The data management device 72EC has a logic circuit 72ECl and a storage device 72ECm. As shown in the figure, the logic circuit 72ECl is connected to the
ロジック回路72EClは、プリンタコントローラ72C(図11)から入力される制御信号に基づいて、上位装置71から入力される画像データを記憶装置72ECmに記憶する。
The logic circuit 72ECl stores the image data input from the
また、ロジック回路72EClは、プリンタコントローラ72Cから入力される制御信号に基づいて、記憶装置72ECmからシアン用画像データIcを読み出す。次に、ロジック回路72EClは、読み出されたシアン用画像データIcを画像出力装置72Eiに送る。 Further, the logic circuit 72ECl reads out the image data Ic for cyan from the storage device 72ECm based on the control signal input from the printer controller 72C. Next, the logic circuit 72ECl sends the read image data Ic for cyan to the image output device 72Ei.
なお、記憶装置72ECmは、3頁程度の画像データを記憶できる容量を有するのが望ましい。3頁程度の画像データが記憶できると、記憶装置72ECmは、上位装置71から入力される画像データ、画像形成中の画像データ及び次に画像形成するための画像データを記憶できる。
It is desirable that the storage device 72ECm has a capacity of storing about 3 pages of image data. When the image data of about 3 pages can be stored, the storage device 72ECm can store the image data input from the
図17は、本発明の一実施形態に係る制御部が有する画像出力装置のハードウェア構成の一例を示すブロック図である。図示するように、画像出力装置72Eiは、出力制御装置72Eicを有し、各色の液体吐出ヘッドユニットであるブラック液体吐出ヘッドユニット210K、シアン液体吐出ヘッドユニット210C、マゼンタ液体吐出ヘッドユニット210M及びイエロー液体吐出ヘッドユニット210Yを制御する。
FIG. 17 is a block diagram showing an example of the hardware configuration of the image output device included in the control unit according to the embodiment of the present invention. As shown in the figure, the image output device 72Ei has an output control device 72Eic, and is a liquid discharge head unit of each color, a black liquid
出力制御装置72Eicは、各色の画像データを各色の液体吐出ヘッドユニットにそれぞれ出力する。すなわち、出力制御装置72Eicは、入力される画像データに基づいて、各色の液体吐出ヘッドユニットを制御する。 The output control device 72Eic outputs image data of each color to the liquid discharge head unit of each color. That is, the output control device 72Eic controls the liquid discharge head unit of each color based on the input image data.
出力制御装置72Eicは、複数の液体吐出ヘッドユニットを同時又は個別に制御する。すなわち、出力制御装置72Eicは、タイミングの入力を受けて、各液体吐出ヘッドユニットに液体を吐出させるタイミングを変える制御等を行う。なお、出力制御装置72Eicは、プリンタコントローラ72C(図15)から入力される制御信号に基づいて、いずれかの液体吐出ヘッドユニットを制御してもよい。さらに、出力制御装置72Eicは、ユーザによる操作等に基づいて、いずれかの液体吐出ヘッドユニットを制御してもよい。 The output control device 72Eic controls a plurality of liquid discharge head units simultaneously or individually. That is, the output control device 72Eic receives the input of the timing and controls to change the timing of discharging the liquid to each liquid discharge head unit. The output control device 72Eic may control any of the liquid discharge head units based on the control signal input from the printer controller 72C (FIG. 15). Further, the output control device 72Eic may control any of the liquid discharge head units based on an operation by the user or the like.
なお、図15に示すプリンタ装置72は、上位装置71から画像データを入力する経路と、制御データに基づく上位装置71及びプリンタ装置72の間での送受信に用いられる経路とをそれぞれ異なる経路とする例である。
The
また、プリンタ装置72は、例えば、ブラック1色で画像形成を行う構成とされてもよい。ブラック1色で画像形成を行う場合において、画像形成を行う速度を速くするため、例えば、1つのデータ管理装置と、4つのブラック液体吐出ヘッドユニットとを有する構成等でもよい。このようにすると、複数のブラック液体吐出ヘッドユニットによって、それぞれブラック用のインクが吐出される。そのため、1つのブラック液体吐出ヘッドユニットとする構成と比較して、速い画像形成を行うことができる。
Further, the
搬送制御装置72Ec(図15)は、ウェブ120を搬送させるモータ等である。例えば、搬送制御装置72Ecは、各ローラ等に接続されるモータ等を制御し、ウェブ120を搬送させる。
The transport control device 72Ec (FIG. 15) is a motor or the like that transports the
<処理例>
図18は、本発明の一実施形態に係る液体を吐出する装置による処理の一例を示すフローチャートである。例えば、ウェブ120(図1)に形成する画像を示す画像データが、液体を吐出する装置110にあらかじめ入力されるとする。次に、液体を吐出する装置110は、画像データに基づいて、図18に示す処理を行い、ウェブ120に画像データが示す画像を形成する。
<Processing example>
FIG. 18 is a flowchart showing an example of processing by a device for discharging a liquid according to an embodiment of the present invention. For example, it is assumed that image data showing an image formed on the web 120 (FIG. 1) is input in advance to the
なお、図18は、1つの液体吐出ヘッドユニットに対する処理を示す。以下、ブラック液体吐出ヘッドユニット210Kに係る処理を例に説明する。また、他の色の液体吐出ヘッドユニットに対しては、例えば、図18に示す処理が、並列又は前後して別途行われる。
Note that FIG. 18 shows the processing for one liquid discharge head unit. Hereinafter, the processing related to the black liquid
ステップS01では、計算部110F60は、被搬送物の位置、移動速度、移動量又はこれらの組み合わせを示す検出結果を計算する。すなわち、液体を吐出する装置110は、複数の被搬送物検知センサWSの出力したデータに基づいて、図11に示すような変動による被搬送物の変動量を算出する。
In step S01, the calculation unit 110F60 calculates a detection result indicating the position of the object to be transported, the moving speed, the moving amount, or a combination thereof. That is, the
具体的には、ステップS01では、液体を吐出する装置110は、まず、被搬送物検知センサWSによって、ウェブ120を検知したセンサデータを取得する。次に、液体を吐出する装置110は、各被搬送物検知センサWSから出力されるそれぞれのセンサデータを取得する。続いて、液体を吐出する装置110は、複数のセンサデータに基づいて、記録媒体等の相対位置又は変動量等の検出結果を算出する。例えば、変動量の算出は、図14に示すように行われる。
Specifically, in step S01, the
ステップS02では、計算部110F60は、検出結果に基づいて指令値を算出する。指令値は、各液体吐出ヘッドユニットを移動させるため、各アクチュエータコントローラCTLに入力される命令値となる。 In step S02, the calculation unit 110F60 calculates the command value based on the detection result. The command value is a command value input to each actuator controller CTL in order to move each liquid discharge head unit.
ステップS03では、液体を吐出する装置は、各液体吐出ヘッドユニットを移動させる移動制御を行う。液体を吐出する装置は、例えば、図13の移動機構を用いて各液体吐出ヘッドユニットを移動させる移動制御を行う。 In step S03, the device for discharging the liquid performs movement control for moving each liquid discharge head unit. The device for discharging the liquid performs movement control for moving each liquid discharge head unit by using, for example, the movement mechanism shown in FIG.
ステップS04では、液体を吐出する装置は、各液体吐出ヘッドユニットの変位量を取得する。例えば、液体を吐出する装置は、図2に示す各変位センサによって変位量を取得する。 In step S04, the device for discharging the liquid acquires the displacement amount of each liquid discharge head unit. For example, a device that discharges a liquid acquires a displacement amount by each displacement sensor shown in FIG.
ステップS05では、液体を吐出する装置110は、指令値と、変位量との差に基づいて補正値を計算する。補正値の計算については後述する。まず、図19に示すように、指令値と、変位量との差を示す偏差DIFは、指令値COMと、変位量PDとを比較して計算することができる。
In step S05, the
図19は、本発明の一実施形態に係る液体を吐出する装置による移動制御における変位量及び指令値の関係の一例を示す図である。図において、横軸は、時間を示し、一方で、縦軸は、時間に対する指令値COM及び変位量PDの値を示す。 FIG. 19 is a diagram showing an example of the relationship between the displacement amount and the command value in the movement control by the device for discharging the liquid according to the embodiment of the present invention. In the figure, the horizontal axis represents time, while the vertical axis represents the command value COM and the displacement amount PD with respect to time.
指令値COMは、各液体吐出ヘッドユニットのいずれかに対応する指令値であり、変位量PDは、当該ヘッドユニットの変位を検知する変位センサPSの出力する変位量である。 The command value COM is a command value corresponding to any of the liquid discharge head units, and the displacement amount PD is a displacement amount output by the displacement sensor PS that detects the displacement of the head unit.
図示するように、指令値COMと、変位量PDとには、偏差DIF等の差が生じる。また、指令値は、図示するように、理想的に変化する。一方で、変位量PDには、位相遅れと、振動とが生じる。そして、変位量PDは、実行されてからセトリング時間(settling time)経過後、振動が収束し、指令値と偏差DIFがある値に収束する。 As shown in the figure, there is a difference in deviation DIF or the like between the command value COM and the displacement amount PD. Further, the command value changes ideally as shown in the figure. On the other hand, the displacement amount PD causes a phase delay and vibration. Then, after the settling time elapses from the execution of the displacement amount PD, the vibration converges, and the command value and the deviation DIF converge to a certain value.
具体的には、偏差DIFは、セトリング時間後、すなわち、図19に示す例では、第2時間TM2以降で、変位量を1回又は複数回取得し(ステップS04)、取得した値又は取得した値の平均値等と、指令値との差を計算すると計算できる値である。 Specifically, the deviation DIF is obtained by acquiring the displacement amount once or multiple times after the settling time, that is, after the second time TM2 in the example shown in FIG. 19 (step S04), and the acquired value or the acquired value. It is a value that can be calculated by calculating the difference between the average value of the values and the command value.
他にも、偏差DIFは、例えば、第1時間TM1乃至第2時間TM2等の任意の時間における変位量を複数回取得して計算されてもよい。すなわち、まず、第1時間TM1乃至第2時間TM2において、変位量が1回又は複数回取得される(ステップS04)。次に、取得した値又は取得した値の平均値等と、指令値との差を計算して、液体を吐出する装置は、偏差DIFを計算してもよい。 In addition, the deviation DIF may be calculated by acquiring the displacement amount at an arbitrary time such as the first time TM1 to the second time TM2 a plurality of times. That is, first, in the first time TM1 to the second time TM2, the displacement amount is acquired once or a plurality of times (step S04). Next, the device that discharges the liquid may calculate the deviation DIF by calculating the difference between the acquired value, the average value of the acquired values, and the command value.
さらに、図19に示すように、振動がある場合には、振動周期の整数倍となる時間内に、液体を吐出する装置は、変位量を複数回取得し(ステップS04)、取得された変位量を平均化又は近似化して、偏差DIFを計算してもよい。 Further, as shown in FIG. 19, when there is vibration, the device for discharging the liquid acquires the displacement amount a plurality of times within a time that is an integral multiple of the vibration cycle (step S04), and the acquired displacement is obtained. The deviation DIF may be calculated by averaging or approximating the quantities.
さらにまた、図19に示すように、振動がある場合には、液体を吐出する装置は、ローパスフィルタ処理等によって、振動を減衰させる。そして、フィルタ処理した後、液体を吐出する装置は、変位量を1回又は複数回取得し(ステップS04)、取得した値又は取得した値の平均値等と、指令値との差を計算して、液体を吐出する装置は、偏差DIFを計算してもよい。 Furthermore, as shown in FIG. 19, when there is vibration, the device for discharging the liquid attenuates the vibration by low-pass filter processing or the like. Then, after the filtering process, the device for discharging the liquid acquires the displacement amount once or a plurality of times (step S04), and calculates the difference between the acquired value or the average value of the acquired values and the command value. The device that discharges the liquid may calculate the deviation DIF.
また、指令値と、変位量との差は、例えば、制御周期ごとに、計算されてもよい。 Further, the difference between the command value and the displacement amount may be calculated for each control cycle, for example.
ステップS06では、ステップS01と同様に、液体を吐出する装置110は、検出結果を算出する。そして、検出結果に基づいて、指令値COMが計算される。続いて、図20に示す補正回路CRCOに、指令値COMが入力される。
In step S06, as in step S01, the
ステップS07では、補正回路CRCOは、指令値COM及び補正値COに基づいて補正指令値COM´を計算する。つまり、液体を吐出する装置110は、図14のように変動量が算出される。そして、変動量を補償するように、液体吐出ヘッドユニットを移動させるため、指令値COMが計算される。
In step S07, the correction circuit CRCO calculates the correction command value COM'based on the command value COM and the correction value CO. That is, the fluctuation amount of the
ステップS08では、液体を吐出する装置は、指令値を補正し、補正された指令値である補正指令値COM´に基づいて液体吐出ヘッドユニットを移動制御させる。ステップS07によって指令値が計算されると、図20に示す補正回路CRCOは、指令値を補正して、補正された補正指令値COM´をアクチュエータコントローラCTLに出力する。このようにすると、補正された指令値に基づいてアクチュエータACの制御が行われる。 In step S08, the device for discharging the liquid corrects the command value and moves and controls the liquid discharge head unit based on the corrected command value COM'which is the corrected command value. When the command value is calculated in step S07, the correction circuit CRCO shown in FIG. 20 corrects the command value and outputs the corrected correction command value COM'to the actuator controller CTL. In this way, the actuator AC is controlled based on the corrected command value.
図20は、本発明の一実施形態に係る液体を吐出する装置が液体吐出ヘッドユニットを移動させるための移動制御例を示す制御ブロック図である。なお、図20は、一つの液体吐出ヘッドユニットを動作させる制御ブロック図である。例えば、図20の制御ブロック図では、コントローラ520、各アクチュエータのアクチュエータコントローラCTL及びアクチュエータAC等のハードウェアが、各液体吐出ヘッドユニットを移動させる。
FIG. 20 is a control block diagram showing an example of movement control for moving the liquid discharge head unit by the device for discharging the liquid according to the embodiment of the present invention. Note that FIG. 20 is a control block diagram for operating one liquid discharge head unit. For example, in the control block diagram of FIG. 20, hardware such as the
図20では、アクチュエータACは、モータMとエンコーダENCを備える。すなわち、各液体吐出ヘッドユニット210は、モータMの駆動力によって移動する。そして、エンコーダENCによって、モータの回転角度等が検出される。
In FIG. 20, the actuator AC includes a motor M and an encoder ENC. That is, each liquid
モータMには、PWM信号生成回路CRPSから、PWM信号が入力される。そして、PWM信号に基づいて、モータMは、回転する。 A PWM signal is input to the motor M from the PWM signal generation circuit CRPS. Then, the motor M rotates based on the PWM signal.
各液体吐出ヘッドユニットには、変位センサPDが接続される。そして、各変位センサは、各液体吐出ヘッドユニットが移動した変位量を計測する。次に、変位センサによって計測される第1変位量PD1、第2変位量PD2、第3変位量PD3及び第4変位量PD4といった各変位量は、補正値計算回路CRCALに、出力される。 A displacement sensor PD is connected to each liquid discharge head unit. Then, each displacement sensor measures the amount of displacement that each liquid discharge head unit has moved. Next, each displacement amount such as the first displacement amount PD1, the second displacement amount PD2, the third displacement amount PD3, and the fourth displacement amount PD4 measured by the displacement sensor is output to the correction value calculation circuit CRCAL.
補正回路CRCO及び補正値計算回路CRCALは、コントローラ520に備えられる機能である。補正値計算回路CRCALは、指令値COMと変位量PDに基づいて補正値COを計算する。補正値COは、指令値COMと、変位量PDとの差を補償する値である。
The correction circuit CRCO and the correction value calculation circuit CRCAL are functions provided in the
補正回路CRCOは、図14に示すように算出された指令値COMと、補正値計算回路CRCALが計算する補正値COに基づいて、補正指令値COM´を算出する。そして、補正指令値COM´が、PID制御回路CRCTに出力される。なお、補正が行われていない場合、補正回路CRCOは指令値COMをそのまま後段へ出力する。 The correction circuit CRCO calculates the correction command value COM'based on the command value COM calculated as shown in FIG. 14 and the correction value CO calculated by the correction value calculation circuit CRCAL. Then, the correction command value COM'is output to the PID control circuit CRCT. If the correction is not performed, the correction circuit CRCO outputs the command value COM as it is to the subsequent stage.
PID制御回路CRCT及びPWM信号生成回路CRPSは、アクチュエータコントローラCTLの備える機能である。PID制御回路CRCTは、指令値を受信すると、指令値に基づいて台形波形又は三角波形等の速度プロファイルを生成し、PWM信号生成回路CRPSに出力する。また、図示するように、PID制御回路CRCTには、エンコーダENCによる検出値がフィードバックされる。なお、フィードバック周期、すなわち、モータのサーボサイクル時間は、例えば、50μs(マイクロ秒)程度である。 The PID control circuit CRCT and the PWM signal generation circuit CRPS are functions provided in the actuator controller CTL. Upon receiving the command value, the PID control circuit CRCT generates a speed profile such as a trapezoidal waveform or a triangular waveform based on the command value, and outputs the speed profile to the PWM signal generation circuit CRPS. Further, as shown in the figure, the detection value by the encoder ENC is fed back to the PID control circuit CRCT. The feedback cycle, that is, the servo cycle time of the motor is, for example, about 50 μs (microseconds).
以上のような構成によってPID制御等の移動制御が行われると、例えば、以下のような制御結果となる。なお、補正回路CRCO、補正値計算回路CRCAL、PID制御回路、PWM信号生成回路は、プロセッサが機能として有しても良い。 When movement control such as PID control is performed by the above configuration, for example, the following control results are obtained. The processor may have the correction circuit CRCO, the correction value calculation circuit CRCAL, the PID control circuit, and the PWM signal generation circuit as functions.
図21は、本発明の一実施形態に係る液体を吐出する装置による往復運動を行う移動制御における変位量及び指令値の関係の一例を示す図である。図21は、いずれか1つの液体吐出ヘッドユニットにおける例である。例えば、図示するように、液体吐出ヘッドユニットの移動制御における振動が少なく、かつ、制御周期Tcごとに、入力される指令値に、変位量がほぼ追従する場合を例に説明する。 FIG. 21 is a diagram showing an example of the relationship between the displacement amount and the command value in the movement control in which the reciprocating motion is performed by the device for discharging the liquid according to the embodiment of the present invention. FIG. 21 is an example of any one liquid discharge head unit. For example, as shown in the figure, a case where the vibration in the movement control of the liquid discharge head unit is small and the displacement amount almost follows the input command value for each control cycle Tc will be described as an example.
まず、制御周期Tcが液体を吐出する装置にあらかじめ設定される。そして、制御周期Tcごとに、指令値が入力される。また、図示する例では、制御周期信号SIGCYCが制御周期Tcを示す。 First, the control cycle Tc is preset in the device that discharges the liquid. Then, a command value is input for each control cycle Tc. Further, in the illustrated example, the control cycle signal SIGCYC indicates the control cycle Tc.
制御周期信号SIGCYCは、ハイレベル(図では、制御周期信号SIGCYCが「High」となることを示す。)となるタイミングで指令値が入力されることを示す信号である。具体的には、図示する例は、7回の指令値が入力される例を示す。 The control cycle signal SIGCYC is a signal indicating that a command value is input at a timing when the control cycle signal SIGCYC becomes a high level (in the figure, it indicates that the control cycle signal SIGCYC becomes “High”). Specifically, the illustrated example shows an example in which a command value is input seven times.
また、この例では、7回の指令値のうち、最初の3回となる指令値は、液体吐出ヘッドユニットを一方向へ移動させる指令値である。以下、図示する例における最初の3回となる指令値を「正方向指令値MVPL」という。したがって、正方向指令値MVPLが入力されると、液体吐出ヘッドユニットは、「正方向」に移動する。 Further, in this example, of the seven command values, the first three command values are command values for moving the liquid discharge head unit in one direction. Hereinafter, the command value that becomes the first three times in the illustrated example is referred to as "positive direction command value MVPL". Therefore, when the forward command value MVPL is input, the liquid discharge head unit moves in the “positive direction”.
一方で、この例では、7回の指令値のうち、最後の3回となる指令値は、液体吐出ヘッドユニットを正方向とは異なる他方向へ移動させる指令値である。以下、図示する例における最後の3回となる指令値を「負方向指令値MVMI」という。したがって、負方向指令値MVMIが入力されると、液体吐出ヘッドユニットは、「負方向」に移動する。 On the other hand, in this example, of the seven command values, the last three command values are command values for moving the liquid discharge head unit in a direction different from the positive direction. Hereinafter, the command value that becomes the last three times in the illustrated example is referred to as "negative direction command value MVMI". Therefore, when the negative direction command value MVMI is input, the liquid discharge head unit moves in the “negative direction”.
さらに、図示する例では、各指令値による移動量が、ほぼ同じ移動量となるように、ほぼ同じ振幅となる正方向指令値MVPL及び負方向指令値MVMIが入力されるとする。そのため、液体吐出ヘッドユニットは、まず、正方向指令値MVPLに基づいて正方向に移動する(往路)。次に、液体吐出ヘッドユニットは、負方向指令値MVMIに基づいて負方向に移動する(復路)。このようにして、正方向指令値MVPL及び負方向指令値MVMIに基づいて、液体吐出ヘッドユニットは、往復運動を行う。 Further, in the illustrated example, it is assumed that the positive command value MVPL and the negative command value MVMI having substantially the same amplitude are input so that the movement amount by each command value becomes almost the same movement amount. Therefore, the liquid discharge head unit first moves in the positive direction based on the forward command value MVPL (outward route). Next, the liquid discharge head unit moves in the negative direction based on the negative direction command value MVMI (return path). In this way, the liquid discharge head unit reciprocates based on the positive command value MVPL and the negative command value MVMI.
例えば、図示するような例では、液体を吐出する装置は、制御周期Tcごとに、変位量を取得する(図18に示すステップS04)。具体的には、1回目(「正方向へ1回目」という場合もある。)の指令値が入力されると、液体を吐出する装置は、第1偏差DIF1を取得する。同様に、2回目(「正方向へ2回目」という場合もある。)及び3回目(「正方向へ3回目」という場合もある。)の指令値が入力されると、液体を吐出する装置は、第2偏差DIF2及び第3偏差DIF3を取得する。 For example, in the example shown in the figure, the device for discharging the liquid acquires the displacement amount for each control cycle Tc (step S04 shown in FIG. 18). Specifically, when the command value of the first time (sometimes referred to as "the first time in the positive direction") is input, the device for discharging the liquid acquires the first deviation DIF1. Similarly, a device that discharges liquid when the command values of the second time (sometimes referred to as "second time in the forward direction") and the third time (sometimes referred to as "third time in the positive direction") are input. Acquires the second deviation DIF2 and the third deviation DIF3.
最初に、図示するように、液体吐出ヘッドユニットは、初期位置P0に位置する。次に、図示するように、1回目の指令値によって入力される移動先を第1位置P1とする。この場合には、1回目の指令値に基づいて液体吐出ヘッドユニットが実際に移動した変位量と、第1位置P1との差が第1偏差DIF1となる。 First, as shown, the liquid discharge head unit is located at the initial position P0. Next, as shown in the figure, the movement destination input by the first command value is set to the first position P1. In this case, the difference between the displacement amount actually moved by the liquid discharge head unit based on the first command value and the first position P1 is the first deviation DIF1.
同様に、2回目の指令値によって入力される移動先を第2位置P2とする。この場合には、2回目の指令値に基づいて液体吐出ヘッドユニットが実際に移動した変位量と、第2位置P2との差が第2偏差DIF2となる。 Similarly, the movement destination input by the second command value is set to the second position P2. In this case, the difference between the displacement amount actually moved by the liquid discharge head unit based on the second command value and the second position P2 is the second deviation DIF2.
さらに、3回目の指令値によって入力される移動先を第3位置P3とする。この場合には、3回目の指令値に基づいて液体吐出ヘッドユニットが実際に移動した変位量と、第3位置P3との差が第3偏差DIF3となる。 Further, the movement destination input by the third command value is set to the third position P3. In this case, the difference between the displacement amount actually moved by the liquid discharge head unit based on the third command value and the third position P3 is the third deviation DIF3.
また、復路でも同様に、液体を吐出する装置は、制御周期Tcごとに、変位量を取得する。具体的には、1回目乃至3回目の指令値が入力される場合と同様に、5回目(「負方向へ1回目」という場合もある。)の指令値が入力されると、液体を吐出する装置は、第4偏差DIF4を取得する。同様に、6回目(「負方向へ2回目」という場合もある。)及び7回目(「負方向へ3回目」という場合もある。)の指令値が入力されると、液体を吐出する装置は、第5偏差DIF5及び第6偏差DIF6を取得する。 Similarly, on the return route, the device that discharges the liquid acquires the displacement amount for each control cycle Tc. Specifically, the liquid is discharged when the command value of the fifth time (sometimes referred to as "the first time in the negative direction") is input, as in the case where the command value of the first to third times is input. The device obtains the fourth deviation DIF4. Similarly, a device that discharges liquid when the command values of the 6th time (sometimes referred to as "the second time in the negative direction") and the 7th time (sometimes referred to as the "third time in the negative direction") are input. Acquires the 5th deviation DIF5 and the 6th deviation DIF6.
5回目の指令値によって入力される移動先を第2位置P2とする。この場合には、5回目の指令値に基づいて液体吐出ヘッドユニットが実際に移動した変位量と、第2位置P2との差が第4偏差DIF4となる。 The movement destination input by the fifth command value is set to the second position P2. In this case, the difference between the displacement amount actually moved by the liquid discharge head unit based on the fifth command value and the second position P2 is the fourth deviation DIF4.
6回目の指令値によって入力される移動先を第1位置P1とする。この場合には、6回目の指令値に基づいて液体吐出ヘッドユニットが実際に移動した変位量と、第1位置P1との差が第5偏差DIF5となる。 The movement destination input by the sixth command value is set to the first position P1. In this case, the difference between the displacement amount actually moved by the liquid discharge head unit based on the sixth command value and the first position P1 is the fifth deviation DIF5.
7回目の指令値によって入力される移動先を初期位置P0とする。この場合には、7回目の指令値に基づいて液体吐出ヘッドユニットが実際に移動した変位量と、初期位置P0との差が第6偏差DIF6となる。 The movement destination input by the 7th command value is set to the initial position P0. In this case, the difference between the displacement amount actually moved by the liquid discharge head unit based on the seventh command value and the initial position P0 is the sixth deviation DIF6.
液体吐出ヘッドユニットの質量は、アクチュエータの質量より大きい場合がある。例えば、液体吐出ヘッドユニットの質量は、アクチュエータの質量の数十倍となる場合がある。例えば、アクチュエータの回転軸が正方向へ移動した際に、反作用の影響等が発生する。このような場合には、アクチュエータには、負方向へ押し返される力が発生する場合がある。 The mass of the liquid discharge head unit may be greater than the mass of the actuator. For example, the mass of the liquid discharge head unit may be several tens of times the mass of the actuator. For example, when the rotation axis of the actuator moves in the positive direction, the influence of reaction or the like occurs. In such a case, the actuator may generate a force that is pushed back in the negative direction.
また、指令値と、変位量との差は、液体吐出ヘッドユニットのばらつき又は実装方法等によって異なることが多い。具体的には、例えば、液体を吐出する装置におけるレイアウトにより、液体吐出ヘッドユニットは、傾いて実装される場合がある。 Further, the difference between the command value and the displacement amount often differs depending on the variation of the liquid discharge head unit, the mounting method, or the like. Specifically, for example, depending on the layout of the device that discharges the liquid, the liquid discharge head unit may be mounted at an angle.
さらに、液体吐出ヘッドユニットを移動させる機構の構造等の原因によって、往路と復路では、指令値と、変位量との差は、異なる場合がある。そこで、図示するように、制御周期Tcごとに、変位量を取得すると、液体を吐出する装置は、往路と、復路とで異なる指令値及び変位量のそれぞれの差の特性を吸収することができる。 Further, the difference between the command value and the displacement amount may differ between the outward route and the return route due to the structure of the mechanism for moving the liquid discharge head unit and the like. Therefore, as shown in the figure, when the displacement amount is acquired for each control cycle Tc, the device that discharges the liquid can absorb the characteristics of the difference between the command value and the displacement amount that are different between the outward route and the return route. ..
以上のようにして、液体を吐出する装置は、指令値と、変位量との差を計算する。次に、液体を吐出する装置は、指令値と、変位量との差に基づいて補正値を計算する。具体的には、図19に示すように、入力される指令値より変位量が小さい値となる場合がある。このような特性がある場合には、補正値は、指令値を大きくするような値となる。すなわち、図20に示す補正回路CRCOは、入力される指令値に、補正値COを加算するように補正する。このように補正すると、液体を吐出する装置は、指令値との差が少ない、すなわち、精度良く液体吐出ヘッドユニットを移動させる制御を行うことができる。 As described above, the device for discharging the liquid calculates the difference between the command value and the displacement amount. Next, the device that discharges the liquid calculates the correction value based on the difference between the command value and the displacement amount. Specifically, as shown in FIG. 19, the displacement amount may be smaller than the input command value. When there is such a characteristic, the correction value becomes a value that increases the command value. That is, the correction circuit CRCO shown in FIG. 20 corrects so as to add the correction value CO to the input command value. When corrected in this way, the device for discharging the liquid can control the movement of the liquid discharge head unit with a small difference from the command value, that is, with high accuracy.
なお、変位量の取得又は変動量の算出等といった各処理は、処理が完了するまでの処理時間が長い場合がある。このように、処理時間が長い場合には、制御周期より処理時間が長くなり、制御周期ごとに、図18に示す処理を実行するのが難しい場合がある。 In addition, each process such as acquisition of displacement amount or calculation of variation amount may take a long time to complete the process. As described above, when the processing time is long, the processing time is longer than the control cycle, and it may be difficult to execute the process shown in FIG. 18 for each control cycle.
このような場合には、液体を吐出する装置は、制御周期の整数倍となる周期ごとに、図18に示す処理を実行してもよい。 In such a case, the device for discharging the liquid may execute the process shown in FIG. 18 every cycle that is an integral multiple of the control cycle.
他にも、液体を吐出する装置は、変位量の振動周期を計測して、振動周期又は振動周期を整数倍した周期ごとに、図18に示す処理を実行してもよい。このようなサイクルで変位量を取得する処理を行うと、振動による振幅変動の影響があっても、液体を吐出する装置は、精度良く変位量を取得できる。 In addition, the device for discharging the liquid may measure the vibration cycle of the displacement amount and execute the vibration cycle or the process shown in FIG. 18 for each cycle obtained by multiplying the vibration cycle by an integer. By performing the process of acquiring the displacement amount in such a cycle, the device that discharges the liquid can acquire the displacement amount with high accuracy even if it is affected by the amplitude fluctuation due to the vibration.
図22は、本発明の一実施形態に係る液体を吐出する装置が有する液体吐出ヘッドユニットを移動させるためのハードウェア構成の一例を示すブロック図である。図示する構成は、液体を吐出する装置110は、複数のアクチュエータ、複数の変位センサ及び複数のセンサデバイスSENを有する例である。
FIG. 22 is a block diagram showing an example of a hardware configuration for moving a liquid discharge head unit included in the liquid discharge device according to the embodiment of the present invention. The configuration shown in the figure is an example in which the
この例では、センサデバイスSENは、それぞれ被搬送物検知センサWSを有する。さらに、図示する構成では、液体を吐出する装置110は、コントローラ520を備え、それぞれのアクチュエータACにアクチュエータコントローラCTLが接続される例である。
In this example, each sensor device SEN has an object to be detected sensor WS. Further, in the illustrated configuration, the
また、コントローラ520は、CPU221、ROM(Read-Only Memory)222及びRAM(Random Access Memory)223を有する。さらに、図示するように、各装置は、他の装置とデータ等を送受信するため、I/O(Input/Output)となるインタフェースを有してもよい。
Further, the
なお、構成は、図示する例に限られない。すなわち、図示する各装置は、液体を吐出する装置が有してもよいし、外部装置でもよい。 The configuration is not limited to the illustrated example. That is, each of the illustrated devices may have a device for discharging the liquid, or may be an external device.
各アクチュエータは、移動制御の対象となる各液体吐出ヘッドユニットに接続される。具体的には、第1アクチュエータAC1は、ブラック液体吐出ヘッドユニット210Kに接続される。すなわち、第1アクチュエータAC1は、ブラック液体吐出ヘッドユニット210Kを移動させる。
Each actuator is connected to each liquid discharge head unit that is subject to movement control. Specifically, the first actuator AC1 is connected to the black liquid
同様に、第2アクチュエータAC2は、シアン液体吐出ヘッドユニット210Cに接続される。すなわち、第2アクチュエータAC2は、シアン液体吐出ヘッドユニット210Cをウェブの搬送方向と直交方向に移動させる。
Similarly, the second actuator AC2 is connected to the cyan liquid
また、第3アクチュエータAC3は、マゼンタ液体吐出ヘッドユニット210Mに接続される。すなわち、第3アクチュエータAC3は、マゼンタ液体吐出ヘッドユニット210Mを移動させる。
Further, the third actuator AC3 is connected to the magenta liquid
さらに、第4アクチュエータAC4は、イエロー液体吐出ヘッドユニット210Yに接続される。すなわち、第4アクチュエータAC4は、イエロー液体吐出ヘッドユニット210Yを移動させる。なお、上述したように、ブラック液体吐出ヘッドユニットを動作させない場合には、第1アクチュエータAC1は、備えなくともよい。また、その場合、第2センサデバイスSEN2も備えなくともよい。
Further, the fourth actuator AC4 is connected to the yellow liquid
CPU221は、図7に示す計算部110F60、図20に示す補正回路CRCO及び補正値計算回路CRCAL等を実現するハードウェアの例である。具体的には、CPU221は、各被搬送物検知センサWSの検出結果を取得し、被搬送物の変動量を算出するための演算等を行う。また、CPU221は、各変位センサPSの出力を取得し、各被搬送物検知センサWSの検出結果から算出された変動量と、各変位センサPSの出力に基づいて、各アクチュエータを制御するための補正指令値を算出する。各アクチュエータコントローラCTLは、上述したように、PID制御を行い、各ヘッドユニットを移動させるための制御等を行う。
The
ROM222及びRAM223は、記憶装置の例である。例えば、ROM222は、CPU221が用いるプログラム及びデータ等を記憶する。また、RAM223は、CPU221が演算を行うのに用いるプログラム等を記憶し、各演算を実現するための記憶領域となる。
速度検出回路SCRは、被搬送物が搬送される移動速度等を検出する電子回路である。例えば、速度検出回路SCRには、「6ppi」信号等が入力される。次に、速度検出回路SCRは、エンコーダからの検出結果等に基づいて、被搬送物が搬送される速度を計算し、CPU221等に送信する。
The speed detection circuit SCR is an electronic circuit that detects the moving speed at which the object to be conveyed is conveyed. For example, a "6 ppi" signal or the like is input to the speed detection circuit SCR. Next, the speed detection circuit SCR calculates the speed at which the object to be conveyed is conveyed based on the detection result from the encoder and the like, and transmits it to the
なお、図示する例では、アクチュエータコントローラCTLをCPU221とは別のハードウェアとして記載したが、アクチュエータコントローラCTLとコントローラ520は同じハードウェアで実現されても良い。
In the illustrated example, the actuator controller CTL is described as hardware different from the
図23は、本発明の一実施形態に係る液体を吐出する装置が液体吐出ヘッドユニットを移動させるための移動機構の全体構成例を示すブロック図である。 FIG. 23 is a block diagram showing an overall configuration example of a moving mechanism for moving the liquid discharging head unit by the device for discharging the liquid according to the embodiment of the present invention.
図23では、ブラック用センサデバイスSENKに備えられた被搬送物検知センサWSを第1被搬送物検知センサWS1とする。また、シアン用センサデバイスSENCに備えられた被搬送物検知センサを第2被搬送物検知センサWS2とする。さらに、マゼンタ用センサデバイスSENMに備えられた被搬送物検知センサを第3被搬送物検知センサとする。さらにまた、イエロー用センサデバイスSENYに備えられた被搬送物検知センサを第4被搬送物検知センサとする。 In FIG. 23, the transported object detection sensor WS provided in the black sensor device SENK is referred to as the first transported object detection sensor WS1. Further, the transported object detection sensor provided in the cyan sensor device SENC is referred to as a second transported object detection sensor WS2. Further, the transported object detection sensor provided in the magenta sensor device SENM is referred to as a third transported object detection sensor. Furthermore, the transported object detection sensor provided in the yellow sensor device SENY is used as the fourth transported object detection sensor.
第1乃至第4の被搬送物検知センサは、それぞれの位置でウェブ120の情報であるセンサデータを取得する。そして、コントローラ520は、センサデータに基づいて、指令値COM又は補正指令値COM´を出力する。
The first to fourth conveyed object detection sensors acquire sensor data which is information of the
図示するように、例えば、液体を吐出する装置110は、各液体吐出ヘッドユニットを移動させる第1アクチュエータAC1、第2アクチュエータAC2、第3アクチュエータAC3及び第4アクチュエータAC4を有する。
As shown in the figure, for example, the
なお、第1アクチュエータAC1、第2アクチュエータAC2、第3アクチュエータAC3及び第4アクチュエータAC4は、図13では、アクチュエータAC2に相当する。 The first actuator AC1, the second actuator AC2, the third actuator AC3, and the fourth actuator AC4 correspond to the actuator AC2 in FIG.
そして、各アクチュエータは、コントローラ520から入力される指令値COM又は補正指令値COM´に基づいて、各液体吐出ヘッドユニットを移動させる制御を行う。具体的には、第1アクチュエータAC1に接続されたアクチュエータコントローラCTL1には、第1指令値COM1又は第1補正指令値COM1´が入力される。同様に、第2アクチュエータAC2に接続されたアクチュエータコントローラCTL2には、第2指令値COM2又は第2補正指令値COM2´が入力される。さらに、第3アクチュエータAC3に接続されたアクチュエータコントローラCTL3には、第3指令値COM3又は第3補正指令値COM3´が入力される。また、第4アクチュエータAC4に接続されたアクチュエータコントローラCTL4には、第4指令値COM4又は第4補正指令値COM4´が入力される。
Then, each actuator controls to move each liquid discharge head unit based on the command value COM or the correction command value COM'input from the
アクチュエータコントローラCTL1の制御に基づいて、第1アクチュエータAC1は、ブラック液体吐出ヘッドユニット210Kを移動させる。そして、ブラック液体吐出ヘッドユニット210Kが移動した変位量(以下「第1変位量PD1」という。)は、第1変位センサPS1によって取得される。
Under the control of the actuator controller CTL1, the first actuator AC1 moves the black liquid
同様に、アクチュエータコントローラCTL2の制御に基づいて、第2アクチュエータAC2は、シアン液体吐出ヘッドユニット210Cを移動させる。そして、シアン液体吐出ヘッドユニット210Cが移動した変位量(以下「第2変位量PD2」という。)は、第2変位センサPS2によって取得される。
Similarly, under the control of the actuator controller CTL2, the second actuator AC2 moves the cyan liquid
さらに、アクチュエータコントローラCTL3の制御に基づいて、第3アクチュエータAC3は、マゼンタ液体吐出ヘッドユニット210Mを移動させる。そして、マゼンタ液体吐出ヘッドユニット210Mが移動した変位量(以下「第3変位量PD3」という。)は、第3変位センサPS3によって取得される。
Further, the third actuator AC3 moves the magenta liquid
また、アクチュエータコントローラCTL4の制御に基づいて、第4アクチュエータAC4は、イエロー液体吐出ヘッドユニット210Yを移動させる。そして、イエロー液体吐出ヘッドユニット210Yが移動した変位量(以下「第4変位量PD4」という。)は、第4変位センサPS4によって取得される。
Further, based on the control of the actuator controller CTL4, the fourth actuator AC4 moves the yellow liquid
そして、コントローラ520は、各変位センサの出力に基づいて補正指令値COM´を算出する。
Then, the
このように、各指令値COMは、図14に示す方法等によって算出される変動量を補償するように、各液体吐出ヘッドユニットを移動させる移動先を示す値である。また、各補正指令値COM´は、ヘッドの変位量との差に基づいて、各指令値COMを補正した値である。そして、各アクチュエータは、各アクチュエータコントローラCTLによるPID制御等の位置制御によって、各指令値又は各補正指令値が示す位置に向かって各液体吐出ヘッドユニットを移動させる。 As described above, each command value COM is a value indicating a destination for moving each liquid discharge head unit so as to compensate for the fluctuation amount calculated by the method shown in FIG. Further, each correction command value COM'is a value obtained by correcting each command value COM based on the difference from the displacement amount of the head. Then, each actuator moves each liquid discharge head unit toward the position indicated by each command value or each correction command value by position control such as PID control by each actuator controller CTL.
なお、例えば、ブラックを基準とする場合には、ブラック液体吐出ヘッドユニット210Kの位置を固定する構成等でもよい。すなわち、ブラックを基準とする場合には、ブラック液体吐出ヘッドユニット210Kを所定の位置に固定するため、ブラック液体吐出ヘッドユニット210Kを移動させるための移動機構は、不要でもよい。すなわち、基準とする色の液体吐出ヘッドユニットには、移動機構がない構成でもよい。
For example, when black is used as a reference, the position of the black liquid
入出力装置INOTは、制御用のパラメータ等をユーザが入力するためのインタフェースとなる装置である。他にも、入出力装置INOTは、エラーが生じた場合等には、エラーを示すメッセージ等をユーザに出力する出力装置である。例えば、入出力装置INOTは、操作パネル等である。 The input / output device INOT is a device that serves as an interface for the user to input control parameters and the like. In addition, the input / output device INOT is an output device that outputs a message or the like indicating an error to the user when an error occurs. For example, the input / output device INOT is an operation panel or the like.
電源装置PWRは、各装置に電力を供給する装置である。例えば、電源装置PWRは、アクチュエータコントローラCTL等に、仕様等によって定まる所定電圧(例えば、5V等である。)の電力を供給する。同様に、電源装置PWRは、各アクチュエータ等に、仕様等によって定まる所定電圧(例えば、24V等である。)の電力を供給する。 The power supply device PWR is a device that supplies electric power to each device. For example, the power supply device PWR supplies electric power of a predetermined voltage (for example, 5V or the like) determined by specifications or the like to the actuator controller CTL or the like. Similarly, the power supply device PWR supplies electric power of a predetermined voltage (for example, 24V or the like) determined by specifications or the like to each actuator or the like.
<別の処理例>
液体を吐出する装置は、例えば、画像形成が行われる前等に、以下の処理を行うでもよい。
<Another processing example>
The device for discharging the liquid may perform the following processing, for example, before the image formation is performed.
図24は、本発明の一実施形態に係る液体を吐出する装置による処理の別の例を示すフローチャートである。なお、以下の説明では、図18と同様の処理には、同一の符号を付し、説明を省略する。 FIG. 24 is a flowchart showing another example of processing by the device for discharging the liquid according to the embodiment of the present invention. In the following description, the same processes as in FIG. 18 are designated by the same reference numerals, and the description thereof will be omitted.
例えば、制御周期ごとに、補正値を計算するのが間に合わない場合がある。又は、指令値と、変位量との関係において液体吐出ヘッドユニットの位相が180°遅れることによって、液体吐出ヘッドユニットの振動が収束せず、発振する場合がある。このような場合には、制御周期より短い時間内に、液体を吐出する装置は、処理を完了させるのが難しい。 For example, it may not be in time to calculate the correction value for each control cycle. Alternatively, if the phase of the liquid discharge head unit is delayed by 180 ° in relation to the command value and the displacement amount, the vibration of the liquid discharge head unit may not converge and may oscillate. In such a case, it is difficult for the device that discharges the liquid to complete the process within a time shorter than the control cycle.
そこで、例えば、画像形成が行われる前又は電源が入力された後等に、液体を吐出する装置は、図示するような処理を行うようにしてもよい。具体的には、まず、画像形成が行われる前には、記録媒体に着弾した液体を乾燥させるためのヒータを予熱する時間等がある。このような時間等に、液体を吐出する装置は、図示する処理を行うのが望ましい。 Therefore, for example, the device for discharging the liquid may perform the process as shown in the figure before the image formation is performed or after the power is input. Specifically, first, before the image formation is performed, there is a time to preheat the heater for drying the liquid that has landed on the recording medium. It is desirable that the device for discharging the liquid at such a time or the like performs the process shown in the figure.
例えば、画像形成が行われる前に、補正等が行われると、液体吐出ヘッドユニットに経年変化が生じていても、液体を吐出する装置は、補正によって、経年変化の影響を少なくすることができる。 For example, if correction or the like is performed before image formation is performed, even if the liquid discharge head unit has aged change, the device for discharging the liquid can reduce the influence of the secular change by the correction. ..
ステップS20では、液体を吐出する装置は、液体吐出ヘッドユニットを往復運動させる移動制御及び差分値を取得する。以下、図21と同様に、まず、正方向へ向かって3回液体吐出ヘッドユニットを移動させ、その後、負方向へ向かって3回移動させる移動制御を行う例で説明する。また、この例では、図25に示すように、指令値と、変位量との複数の差を平均して、「差分値」が取得される例である。図25の説明は、後述する。 In step S20, the device for discharging the liquid acquires the movement control and the difference value for reciprocating the liquid discharge head unit. Hereinafter, as in FIG. 21, an example will be described in which movement control is performed in which the liquid discharge head unit is first moved three times in the positive direction and then moved three times in the negative direction. Further, in this example, as shown in FIG. 25, the "difference value" is acquired by averaging a plurality of differences between the command value and the displacement amount. The description of FIG. 25 will be described later.
ステップS21では、液体を吐出する装置は、差分値に基づいて補正値を計算する。すなわち、ステップS21では、液体を吐出する装置は、移動制御において差分値が補償されるような補正値を計算する。具体的には、液体を吐出する装置は、差分値に、「-1」を乗じた値を計算する。このようにして、液体を吐出する装置は、差分値に基づいて補正値を計算する。 In step S21, the device for discharging the liquid calculates the correction value based on the difference value. That is, in step S21, the device for discharging the liquid calculates a correction value such that the difference value is compensated in the movement control. Specifically, the device that discharges the liquid calculates a value obtained by multiplying the difference value by "-1". In this way, the device that discharges the liquid calculates the correction value based on the difference value.
以上のように、補正値が計算できると、図18に示す2回目以降のように、液体を吐出する装置は、補正値に基づいて指令値を補正して、補正された指令値に基づいて移動制御を行うことができる。 As described above, when the correction value can be calculated, the device for discharging the liquid corrects the command value based on the correction value and based on the corrected command value, as in the second and subsequent times shown in FIG. Movement control can be performed.
すなわち、図示するように、図18と同様に、ステップS06乃至ステップS08が行われると、指令値が、補正値に基づいて補正される。例えば、図20に示す補正回路CRCO等によって、液体を吐出する装置は、指令値を補正する。 That is, as shown in the figure, when steps S06 to S08 are performed as in FIG. 18, the command value is corrected based on the correction value. For example, the device that discharges the liquid corrects the command value by the correction circuit CRCO or the like shown in FIG.
なお、液体を吐出する装置は、図示する別の処理で差分値を計算するに限られない。図示する別の処理は、例えば、正方向及び負方向のそれぞれの偏差がほぼ均等である場合等に行われるのが望ましい。一方で、例えば、奇数回と、偶数回とで偏差に違いが発生する場合等がある。このような場合には、差分値は、奇数回と、偶数回とで分けて計算されてもよい。 The device for discharging the liquid is not limited to calculating the difference value by another process shown in the figure. It is desirable that another process shown in the figure is performed, for example, when the deviations in the positive direction and the negative direction are substantially equal. On the other hand, for example, there may be a difference in deviation between odd-numbered times and even-numbered times. In such a case, the difference value may be calculated separately for odd-numbered times and even-numbered times.
また、往復運動は、複数回行われてもよい。すなわち、往復運動は、図21に示すように、1回行われるに限られない。したがって、液体を吐出する装置は、複数回の往復運動において差分値を計算してもよい。例えば、図26のように、液体を吐出する装置は、複数回の往復運動において差分値を計算する。図26の説明は、後述する。 Further, the reciprocating motion may be performed a plurality of times. That is, the reciprocating motion is not limited to one time as shown in FIG. Therefore, the device that discharges the liquid may calculate the difference value in a plurality of reciprocating motions. For example, as shown in FIG. 26, a device that discharges a liquid calculates a difference value in a plurality of reciprocating motions. A description of FIG. 26 will be described later.
図25は、本発明の一実施形態に係る液体を吐出する装置による差分値の取得例を示すフローチャートである。例えば、図21に示すように移動制御を行う場合において、図24に示すステップS20では、図25に示すような処理によって、差分値が取得される。また、差分値は、以下のように、正方向用と、負方向用とに分けて取得されるのが望ましい。 FIG. 25 is a flowchart showing an example of acquiring a difference value by a device for discharging a liquid according to an embodiment of the present invention. For example, in the case of performing movement control as shown in FIG. 21, in step S20 shown in FIG. 24, the difference value is acquired by the process as shown in FIG. 25. Further, it is desirable that the difference value is acquired separately for the positive direction and the negative direction as shown below.
ステップS201では、液体を吐出する装置は、液体吐出ヘッドユニットを正方向へ移動させる1回目の移動制御を行う。具体的には、図21に示す例では、正方向へ1回目の移動制御は、第1位置P1へ移動させる指令値に基づく移動制御である。 In step S201, the device for discharging the liquid performs the first movement control for moving the liquid discharge head unit in the positive direction. Specifically, in the example shown in FIG. 21, the first movement control in the positive direction is a movement control based on a command value for moving to the first position P1.
ステップS202では、液体を吐出する装置は、第1偏差を取得する。具体的には、図21に示す例では、第1位置P1と、変位量とを比較すると、液体を吐出する装置は、第1偏差DIF1を取得できる。 In step S202, the device for discharging the liquid acquires the first deviation. Specifically, in the example shown in FIG. 21, when the first position P1 and the displacement amount are compared, the device that discharges the liquid can acquire the first deviation DIF1.
ステップS203では、液体を吐出する装置は、液体吐出ヘッドユニットを正方向へ移動させる2回目の移動制御を行う。具体的には、図21に示す例では、正方向へ2回目の移動制御は、第2位置P2へ移動させる指令値に基づく移動制御である。 In step S203, the device for discharging the liquid performs a second movement control for moving the liquid discharge head unit in the positive direction. Specifically, in the example shown in FIG. 21, the second movement control in the positive direction is the movement control based on the command value for moving to the second position P2.
ステップS204では、液体を吐出する装置は、第2偏差を取得する。具体的には、図21に示す例では、第2位置P2と、変位量とを比較すると、液体を吐出する装置は、第2偏差DIF2を取得できる。 In step S204, the device for discharging the liquid acquires the second deviation. Specifically, in the example shown in FIG. 21, when the second position P2 and the displacement amount are compared, the device that discharges the liquid can acquire the second deviation DIF2.
ステップS205では、液体を吐出する装置は、液体吐出ヘッドユニットを正方向へ移動させる3回目の移動制御を行う。具体的には、図21に示す例では、正方向へ3回目の移動制御は、第3位置P3へ移動させる指令値に基づく移動制御である。 In step S205, the device for discharging the liquid performs a third movement control for moving the liquid discharge head unit in the positive direction. Specifically, in the example shown in FIG. 21, the third movement control in the positive direction is a movement control based on a command value for moving to the third position P3.
ステップS206では、液体を吐出する装置は、第3偏差を取得する。具体的には、図21に示す例では、第3位置P3と、変位量とを比較すると、液体を吐出する装置は、第3偏差DIF3を取得できる。 In step S206, the device for discharging the liquid acquires the third deviation. Specifically, in the example shown in FIG. 21, when the third position P3 and the displacement amount are compared, the device for discharging the liquid can acquire the third deviation DIF3.
ステップS207では、液体を吐出する装置は、液体吐出ヘッドユニットを負方向へ移動させる1回目の移動制御を行う。具体的には、図21に示す例では、負方向へ1回目の移動制御は、第2位置P2へ移動させる指令値に基づく移動制御である。 In step S207, the device for discharging the liquid performs the first movement control for moving the liquid discharge head unit in the negative direction. Specifically, in the example shown in FIG. 21, the first movement control in the negative direction is a movement control based on a command value for moving to the second position P2.
ステップS208では、液体を吐出する装置は、第4偏差を取得する。具体的には、図21に示す例では、第2位置P2と、変位量とを比較すると、液体を吐出する装置は、第4偏差DIF4を取得できる。 In step S208, the device for discharging the liquid acquires the fourth deviation. Specifically, in the example shown in FIG. 21, when the second position P2 and the displacement amount are compared, the device for discharging the liquid can acquire the fourth deviation DIF4.
ステップS209では、液体を吐出する装置は、液体吐出ヘッドユニットを負方向へ移動させる2回目の移動制御を行う。具体的には、図21に示す例では、負方向へ2回目の移動制御は、第1位置P1へ移動させる指令値に基づく移動制御である。 In step S209, the device for discharging the liquid performs a second movement control for moving the liquid discharge head unit in the negative direction. Specifically, in the example shown in FIG. 21, the second movement control in the negative direction is a movement control based on a command value for moving to the first position P1.
ステップS210では、液体を吐出する装置は、第5偏差を取得する。具体的には、図21に示す例では、第1位置P1と、変位量とを比較すると、液体を吐出する装置は、第5偏差DIF5を取得できる。 In step S210, the device for discharging the liquid acquires the fifth deviation. Specifically, in the example shown in FIG. 21, when the first position P1 and the displacement amount are compared, the device for discharging the liquid can acquire the fifth deviation DIF5.
ステップS211では、液体を吐出する装置は、液体吐出ヘッドユニットを負方向へ移動させる3回目の移動制御を行う。具体的には、図21に示す例では、負方向へ3回目の移動制御は、初期位置P0へ移動させる指令値に基づく移動制御である。 In step S211th, the device for discharging the liquid performs the third movement control for moving the liquid discharge head unit in the negative direction. Specifically, in the example shown in FIG. 21, the third movement control in the negative direction is a movement control based on a command value for moving to the initial position P0.
ステップS212では、液体を吐出する装置は、第6偏差を取得する。具体的には、図21に示す例では、初期位置P0と、変位量とを比較すると、液体を吐出する装置は、第6偏差DIF6を取得できる。 In step S212, the device for discharging the liquid acquires the sixth deviation. Specifically, in the example shown in FIG. 21, when the initial position P0 and the displacement amount are compared, the device for discharging the liquid can acquire the sixth deviation DIF6.
ステップS213では、液体を吐出する装置は、第1偏差、第2偏差及び第3偏差の平均値を計算する。このようにして、液体を吐出する装置は、往復運動における往路での偏差の平均値を計算する。すなわち、ステップS213によって、正方向へ移動させる移動制御で発生する偏差の平均値が計算されるため、正方向用の差分値が計算される。 In step S213, the device for discharging the liquid calculates the average value of the first deviation, the second deviation, and the third deviation. In this way, the device that discharges the liquid calculates the average value of the deviations in the outward path in the reciprocating motion. That is, in step S213, the average value of the deviations generated in the movement control for moving in the positive direction is calculated, so that the difference value for the positive direction is calculated.
ステップS214では、液体を吐出する装置は、第4偏差、第5偏差及び第6偏差の平均値を計算する。このようにして、液体を吐出する装置は、往復運動における復路での偏差の平均値を計算する。すなわち、ステップS214によって、負方向へ移動させる移動制御で発生する偏差の平均値が計算されるため、負方向用の差分値が計算される。 In step S214, the device for discharging the liquid calculates the average value of the fourth deviation, the fifth deviation, and the sixth deviation. In this way, the device that discharges the liquid calculates the average value of the deviations on the return path in the reciprocating motion. That is, in step S214, the average value of the deviations generated in the movement control for moving in the negative direction is calculated, so that the difference value for the negative direction is calculated.
ステップS215では、液体を吐出する装置は、差分値を保存する。すなわち、液体を吐出する装置は、ステップS213及びステップS214で計算される差分値を保存する。 In step S215, the device for discharging the liquid stores the difference value. That is, the device for discharging the liquid stores the difference value calculated in step S213 and step S214.
図26は、本発明の一実施形態に係る液体を吐出する装置による複数回の往復運動において差分値を取得する例を示すフローチャートである。以下、2回の往復運動を行う場合を例に説明する。 FIG. 26 is a flowchart showing an example of acquiring a difference value in a plurality of reciprocating motions by a device for discharging a liquid according to an embodiment of the present invention. Hereinafter, a case where two reciprocating motions are performed will be described as an example.
ステップS30では、液体を吐出する装置は、1回目の差分値を取得する。例えば、図25に示すような処理、すなわち、図24におけるステップS20と同様の処理を行って、液体を吐出する装置は、1回目の差分値を取得する。 In step S30, the device for discharging the liquid acquires the first difference value. For example, the apparatus for discharging the liquid obtains the first difference value by performing the process as shown in FIG. 25, that is, the same process as in step S20 in FIG. 24.
ステップS31では、液体を吐出する装置は、1回目の差分値に基づいて補正値を計算する。例えば、図24に示すステップS21と同様の処理を行って、液体を吐出する装置は、補正値を計算する。 In step S31, the device for discharging the liquid calculates the correction value based on the first difference value. For example, the device that discharges the liquid performs the same processing as in step S21 shown in FIG. 24, and calculates the correction value.
1回目の差分値に基づいて、補正値が計算された後、計算された補正値に基づいて指令値を補正して、液体を吐出する装置は、2回目の往復運動を行う。例えば、2回目の往復運動は、1回目と同様の往復運動とする。 After the correction value is calculated based on the first difference value, the command value is corrected based on the calculated correction value, and the device for discharging the liquid performs the second reciprocating motion. For example, the second reciprocating motion is the same as the first reciprocating motion.
ステップS32は、液体を吐出する装置は、2回目の差分値を取得する。例えば、1回目と同様に、図25に示すような処理、すなわち、図24におけるステップS20と同様の処理を行って、液体を吐出する装置は、2回目の差分値を取得する。なお、2回目では、画像形成装置は、補正された指令値と、補正された指令値に基づいて移動制御され移動した変位量とを比較して、各偏差を取得する。 In step S32, the device for discharging the liquid acquires the difference value for the second time. For example, the device for discharging the liquid obtains the difference value of the second time by performing the process as shown in FIG. 25, that is, the same process as step S20 in FIG. 24, as in the first time. In the second time, the image forming apparatus compares the corrected command value with the displacement amount controlled and moved based on the corrected command value, and acquires each deviation.
ステップS33では、液体を吐出する装置は、2回目の差分値に基づいて補正値を計算する。例えば、1回目と同様に、図24に示すステップS21と同様の処理を行って、液体を吐出する装置は、補正値を計算する。 In step S33, the device for discharging the liquid calculates the correction value based on the second difference value. For example, the device that discharges the liquid calculates the correction value by performing the same processing as in step S21 shown in FIG. 24 as in the first time.
以上のように、1回目の差分値に基づいて、1度目の補正を行い、1度目の補正後、2度目の差分値が計算されるのが望ましい。すなわち、液体を吐出する装置は、複数回補正を行うとし、前回の補正を行った状態下において、液体を吐出する装置は、更に補正値を計算して補正を行うのが望ましい。このようにすると、液体を吐出する装置は、着弾精度を向上させることができる。 As described above, it is desirable that the first correction is performed based on the first difference value, and after the first correction, the second difference value is calculated. That is, it is desirable that the device for discharging the liquid performs the correction a plurality of times, and the device for discharging the liquid further calculates the correction value and performs the correction under the state where the previous correction is performed. In this way, the device that discharges the liquid can improve the landing accuracy.
なお、往復運動は、3回以上行われてもよい。この場合には、往復運動の回数に応じてステップS32及びステップS33が繰り返される。 The reciprocating motion may be performed three or more times. In this case, steps S32 and S33 are repeated according to the number of reciprocating motions.
このように、複数回の往復運動に基づいて補正値が計算されると、液体を吐出する装置は、補正値を精度良く計算することができる。そのため、液体を吐出する装置は、液体を精度良く着弾させることができる。 As described above, when the correction value is calculated based on the reciprocating motion of a plurality of times, the device for discharging the liquid can calculate the correction value with high accuracy. Therefore, the device that discharges the liquid can land the liquid with high accuracy.
さらに、液体を吐出する装置は、画像形成前に、図24に示すステップS20及びステップS21を行い、かつ、制御周期ごとに、図18に示す処理を行うとしてもよい。 Further, the device for discharging the liquid may perform steps S20 and S21 shown in FIG. 24 before image formation, and may perform the process shown in FIG. 18 for each control cycle.
<まとめ>
本発明の一実施形態に係る液体を吐出する装置は、被搬送物検知センサWSの出力から計算部110F60によって求められた被搬送物の位置、移動速度、移動量又はこれらの組み合わせを示す検出結果に基づき、液体吐出ヘッドユニット210を移動させる指令値を出力することができる。しかし、移動制御において、指令値に基づいてアクチュエータACが液体吐出ヘッドユニットを移動させると、図21に示すように、偏差DIF等のような差が発生する場合が多い。すなわち、指令値で狙う位置に、液体吐出ヘッドユニットが移動せず、指令値が示す位置と、実際に液体吐出ヘッドユニットが移動制御によって移動した位置には、差が生じる場合が多い。
<Summary>
The device for discharging the liquid according to the embodiment of the present invention is a detection result indicating the position, the moving speed, the moving amount, or a combination thereof obtained by the calculation unit 110F60 from the output of the conveyed object detection sensor WS. Based on the above, it is possible to output a command value for moving the liquid
そこで、液体を吐出する装置110は、液体吐出ヘッドユニット210に配置された変位センサPSによって、実際に液体吐出ヘッドユニットが移動制御によって移動した位置を示す変位量を取得する。このようにすると、液体を吐出する装置110は、指令値と、変位量とを比較して、偏差DIF等の差を計算することができる。
Therefore, the
次に、液体を吐出する装置110は、補正値計算回路CRCALによって、偏差DIF等の差に基づいて補正値COを計算する。すなわち、補正値計算回路CRCALは、偏差DIFが少なくなるような補正値COを計算する。具体的には、指令値より大きく移動する液体吐出ヘッドユニットの特性である場合には、補正値計算回路CRCALは、液体吐出ヘッドユニットが小さく移動するような補正値COを計算する。一方で、指令値より小さく移動する液体吐出ヘッドユニットの特性である場合には、補正値計算回路CRCALは、液体吐出ヘッドユニットが大きく移動するような補正値COを計算する。
Next, the
そして、液体を吐出する装置110は、補正回路CRCO、指令値を補正する。このようにして、補正された指令値によって移動制御が行われると、偏差DIF等のような差が少なくできる。すなわち、補正された指令値が用いられると、指令値と、変位量とが一致しやすくなる。そのため、液体を吐出する装置110は、変動量を精度良く補償し、吐出される液体の着弾位置の精度等の処理制度を向上させることができる。
Then, the
また、液体を吐出して記録媒体に画像を形成する場合には、本発明の一実施形態に係る液体を吐出する装置は、吐出される各色の液体の着弾位置が精度良くなると、色ずれが少なくなり、形成される画像の画質を向上させることができる。 Further, in the case of ejecting a liquid to form an image on a recording medium, the device for ejecting the liquid according to the embodiment of the present invention causes color shift when the landing position of the discharged liquid of each color becomes accurate. The number is reduced, and the image quality of the formed image can be improved.
また、計測部110F40があると、より確実に記録媒体の位置等が検出できる。例えば、ローラ230の回転軸等に、エンコーダ等の計測装置が設置されるとする。そして、計測部110F40は、エンコーダ等によって、記録媒体の移動量を計測する。このように、計測部110F40によって計測された計測結果が更に入力されると、液体を吐出する装置110は、搬送方向における記録媒体の位置等をより確実に検出できる。
Further, if the measurement unit 110F40 is provided, the position of the recording medium and the like can be detected more reliably. For example, it is assumed that a measuring device such as an encoder is installed on the rotating shaft of the
<変形例> <Modification example>
なお、本発明に係る液体を吐出する装置は、1以上の装置を有する液体を吐出するシステムによって実現されてもよい。例えば、ブラック液体吐出ヘッドユニット210Kとシアン液体吐出ヘッドユニット210Cが同じ筐体の装置であり、マゼンタ液体吐出ヘッドユニット210Mとイエロー液体吐出ヘッドユニット210Yが同じ筐体の装置であり、この両者を有する液体を吐出するシステムによって実現されても良い。
The device for discharging the liquid according to the present invention may be realized by a system for discharging the liquid having one or more devices. For example, the black liquid
図27は、本発明の一実施形態に係る液体を吐出する装置が有する被搬送物検知センサの変形例を示す模式図である。図示するように、被搬送物センサは、ウェブ120の搬送方向に直交する方向のエッジを検知するエッジセンサ等でもよい。例えば、エッジセンサは、CIS等である。
FIG. 27 is a schematic diagram showing a modified example of the transported object detection sensor included in the device for discharging the liquid according to the embodiment of the present invention. As shown in the figure, the object to be transported sensor may be an edge sensor or the like that detects an edge in a direction orthogonal to the transport direction of the
図示する例では、各液体吐出ヘッドユニットのそれぞれの上流側に、ウェブ120の端部位置を検出する被搬送物検知センサが設けられる。また、図示する例では、被搬送物検知センサは、ウェブ120の搬送方向に直交する方向の端部が通過する位置に配置される。なお、図示する例でも、図22のように、ブラック液体吐出ヘッドユニット210Kが移動できる構成でもよい。
In the illustrated example, an object detection sensor for detecting the end position of the
さらに被搬送物は、用紙等の記録媒体に限られない。被搬送物は、液体が付着可能な材質であればよい。例えば、液体が付着可能な材質は、紙、糸、繊維、布帛、皮革、金属、プラスチック、ガラス、木材、セラミックス又はこれらの組み合わせ等の液体が一時的でも付着可能であればよい。 Further, the object to be transported is not limited to a recording medium such as paper. The material to be transported may be any material to which liquid can adhere. For example, the material to which the liquid can be attached may be paper, thread, fiber, fabric, leather, metal, plastic, glass, wood, ceramics, or a combination thereof, as long as the liquid can be attached even temporarily.
また、本発明に係る液体を吐出する装置及び液体を吐出するシステムでは、液体は、インクに限られず、他の種類の記録液又は定着処理液等でもよい。すなわち、本発明に係る液体を吐出する装置及び液体を吐出するシステムは、インク以外の種類の液体を吐出する装置に適用されてもよい。 Further, in the liquid ejection device and the liquid ejection system according to the present invention, the liquid is not limited to ink, but may be another type of recording liquid, fixing treatment liquid, or the like. That is, the liquid ejection device and the liquid ejection system according to the present invention may be applied to a liquid ejection device other than ink.
したがって、本発明に係る液体を吐出する装置及び液体を吐出するシステムは、画像を形成するに限られない。例えば、形成される物体は、三次元造形物等でもよい。 Therefore, the device for discharging the liquid and the system for discharging the liquid according to the present invention are not limited to forming an image. For example, the formed object may be a three-dimensional model or the like.
また、本発明は、搬送される被搬送物に対して、搬送方向に直交する方向に並べられたライン状のヘッドユニットを用いて何らかの処理を行う装置に適用可能である。 Further, the present invention can be applied to an apparatus that performs some processing on a transported object by using a line-shaped head unit arranged in a direction orthogonal to the transport direction.
<第1変形例>
第1の支持部材及び第2の支持部材は、兼ねられてもよい。例えば、第1の支持部材及び第2の支持部材は、以下のような構成でもよい。
<First modification>
The first support member and the second support member may be combined. For example, the first support member and the second support member may have the following configurations.
図28は、本発明の一実施形態に係る液体を吐出する装置の変形例を示す概略図である。図2と比較すると、図示する構成では、第1の支持部材及び第2の支持部材の配置が異なる。図示するように、第1の支持部材及び第2の支持部材は、例えば、第1部材RL1、第2部材RL2、第3部材RL3、第4部材RL4及び第5部材RL5によって実現されてもよい。すなわち、各液体吐出ヘッドユニットの上流側に設けられる第2の支持部材と、各液体吐出ヘッドユニットの下流側に設けられる第1の支持部材とは、兼用されてもよい。なお、第1の支持部材及び第2の支持部材は、ローラで兼ねられてもよく、湾曲板で兼ねられてもよい。 FIG. 28 is a schematic view showing a modified example of the device for discharging the liquid according to the embodiment of the present invention. Compared with FIG. 2, in the illustrated configuration, the arrangement of the first support member and the second support member is different. As shown in the figure, the first support member and the second support member may be realized by, for example, the first member RL1, the second member RL2, the third member RL3, the fourth member RL4, and the fifth member RL5. .. That is, the second support member provided on the upstream side of each liquid discharge head unit and the first support member provided on the downstream side of each liquid discharge head unit may be shared. The first support member and the second support member may be combined with a roller or a curved plate.
<第2変形例>
例えば、搬送装置は、以下のように、被搬送物に対して読み取り等の処理を行うでもよい。
<Second modification>
For example, the transport device may perform processing such as reading on the transported object as follows.
図29は、本発明の一実施形態に係る搬送装置の第2変形例を示す概略図である。以下、図示するように、ウェブ120を上流側から下流側へ(図では、左から右となる。)搬送する場合を例に説明する。
FIG. 29 is a schematic view showing a second modification of the transport device according to the embodiment of the present invention. Hereinafter, as illustrated, a case where the
図示するように、本変形例では、ヘッドユニットがCIS(Contact Image Sensor、密着型イメージセンサ)ヘッドを備える。 As shown in the figure, in this modification, the head unit includes a CIS (Contact Image Sensor) head.
ヘッドユニットは、直交方向20に1個以上設置されたCISヘッドによって構成される。例えば、図示するように、搬送装置は、ヘッドユニットHD1及びヘッドユニットHD2のように、2個のヘッドユニットを有する。なお、ヘッドユニットの数は、2個に限られず、3個以上であってもよい。
The head unit is composed of one or more CIS heads installed in the
図示するように、ヘッドユニットHD1及びヘッドユニットHD2は、それぞれ1つ以上のCISヘッドを備える。以下、ヘッドユニットは、1つのCISヘッドを備えるが、例えば、ヘッドユニットは、2つのCISヘッドが互いに千鳥状になる位置に、複数のCISヘッドを備えても良い。 As shown in the figure, the head unit HD1 and the head unit HD2 each include one or more CIS heads. Hereinafter, the head unit includes one CIS head, but for example, the head unit may include a plurality of CIS heads at positions where the two CIS heads are staggered with each other.
ヘッドユニットHD1及びヘッドユニットHD2は、いわゆるスキャナ(Scanner)を構成する。したがって、ヘッドユニットHD1及びヘッドユニットHD2は、ウェブ120の表面に形成される画像等を読み取り、読み取った画像等を示す画像データを出力する。そして、搬送装置は、各ヘッドユニットから出力される画像データを繋ぎ合わせると、直交方向20に繋がった画像を生成することができる。
The head unit HD1 and the head unit HD2 form a so-called scanner. Therefore, the head unit HD1 and the head unit HD2 read an image or the like formed on the surface of the
また、この例では、搬送装置は、コントローラ520、第1アクチュエータコントローラCTL1及び第2アクチュエータコントローラCTL2を有する。コントローラ520、第1アクチュエータコントローラCTL1及び第2アクチュエータコントローラCTL2は、情報処理装置である。具体的には、コントローラ520、第1アクチュエータコントローラCT1及び第2アクチュエータコントローラCT2は、CPU、電子回路又はこれらの組み合わせ等の演算装置、制御装置、記憶装置及びインタフェース等を有するハードウェア構成である。なお、コントローラ520、第1アクチュエータコントローラCTL1及び第2アクチュエータコントローラCTL2は、複数の装置でもよく、同一の装置で構成されても良い。
Further, in this example, the transfer device has a
各ヘッドユニットに対して、センサデバイスSEN1及びSEN2がそれぞれ設置される。そして、搬送装置は、センサデバイスによって、ウェブ120の表面情報を検出し、複数の検出結果の間での相対位置、移動速度、移動量又はこれらの組み合わせ等を検出できる。
Sensor devices SEN1 and SEN2 are installed for each head unit, respectively. Then, the transport device can detect the surface information of the
この例では、2個のヘッドユニットHD1及びHD2に対して、複数のローラが設置される。図示するように、複数のローラは、例えば、2個のヘッドユニットHD1及びHD2を挟んで、上流側と、下流側とにそれぞれ設置される。 In this example, a plurality of rollers are installed for the two head units HD1 and HD2. As shown in the figure, the plurality of rollers are installed, for example, on the upstream side and the downstream side, respectively, with the two head units HD1 and HD2 interposed therebetween.
このように、ローラ間INTでセンサデバイスによって検出が行われると、搬送装置は、処理位置に近い位置でウェブ120の位置等を検出できる。また、ローラ間INTは、移動速度が比較的安定する場合が多い。そのため、搬送装置は、搬送方向、直交方向又は両方向において、複数の検出結果の間での相対位置、速度、移動量又はこれらの組み合わせ等を精度良く検出できる。
In this way, when the detection is performed by the sensor device in the inter-roller INT, the transport device can detect the position of the
また、センサデバイスが設置される位置は、ローラ間INTにおいて処理位置より第1ローラR1に近い位置であるのが望ましい。すなわち、センサデバイスは、処理位置より上流側で検出を行うのが望ましい。具体的には、図示する例では、センサデバイスSEN1は、ヘッドユニットHD1が処理を行う処理位置より、第1ローラR1に近い位置に設置されるのが望ましい。すなわち、センサデバイスSEN1は、図示する例では、ヘッドユニットHD1が処理を行う処理位置と、第1ローラR1との間の区間(以下「第1上流区間INT1」という。)で検出を行うのが望ましい。 Further, it is desirable that the position where the sensor device is installed is a position closer to the first roller R1 than the processing position in the inter-roller INT. That is, it is desirable that the sensor device performs detection on the upstream side of the processing position. Specifically, in the illustrated example, it is desirable that the sensor device SEN1 is installed at a position closer to the first roller R1 than the processing position where the head unit HD1 performs processing. That is, in the illustrated example, the sensor device SEN1 performs detection in a section between the processing position where the head unit HD1 performs processing and the first roller R1 (hereinafter referred to as "first upstream section INT1"). desirable.
同様に、図示する例では、センサデバイスSEN2は、ヘッドユニットHD2が処理を行う処理位置より、第1ローラR1に近い位置に設置されるのが望ましい。すなわち、センサデバイスSEN2は、図示する例では、ヘッドユニットHD2が処理を行う処理位置と、第1ローラR1との間の区間(以下「第2上流区間INT2」という。)で検出を行うのが望ましい。 Similarly, in the illustrated example, it is desirable that the sensor device SEN2 is installed at a position closer to the first roller R1 than the processing position where the head unit HD2 performs processing. That is, in the illustrated example, the sensor device SEN2 performs detection in a section between the processing position where the head unit HD2 processes and the first roller R1 (hereinafter referred to as “second upstream section INT2”). desirable.
第1上流区間INT1及び第2上流区間INT2にセンサデバイスが設置されると、搬送装置は、被搬送物の位置等を精度良く検出できる。このような位置にセンサデバイスが設置されると、センサデバイスが処理位置より上流側に設置される。そのため、搬送装置は、まず、上流側でセンサデバイスによって被搬送物の表面情報を検出できる。そして、搬送装置は、検出結果に基づいて、直交方向、搬送方向又は両方向において、ヘッドユニットによる処理タイミング、ヘッドユニットを移動させる量又は両方を計算できる。すなわち、上流側で被搬送物の位置等が検出された後、ウェブ120が処理位置に搬送される間に、処理タイミングの計算又はヘッドユニットの移動等が行われるため、搬送装置は、精度良く処理位置を変更できる。
When the sensor device is installed in the first upstream section INT1 and the second upstream section INT2, the transport device can accurately detect the position and the like of the object to be transported. When the sensor device is installed at such a position, the sensor device is installed on the upstream side of the processing position. Therefore, the transport device can first detect the surface information of the transported object by the sensor device on the upstream side. Then, the transport device can calculate the processing timing by the head unit, the amount of movement of the head unit, or both in the orthogonal direction, the transport direction, or both directions based on the detection result. That is, after the position of the object to be transported is detected on the upstream side, the processing timing is calculated or the head unit is moved while the
ヘッドユニットのほぼ直下にセンサデバイスが設置されると、処理タイミングの計算又はヘッドユニットを移動させる等の処理時間によって、処理の実行に遅れが生じる場合がある。したがって、センサデバイスが設置される位置は、処理位置より上流側であると、搬送装置は、処理における遅れを少なくできる。また、処理位置、すなわち、ヘッドユニットの直下となる付近は、センサデバイス等を設置する位置とするのに制約される場合ある。そのため、センサデバイスが設置される位置は、処理位置より第1ローラR1に近い位置、すなわち、処理位置より上流であるのが望ましい。 If the sensor device is installed almost directly under the head unit, the execution of processing may be delayed due to the processing time such as calculation of processing timing or movement of the head unit. Therefore, if the position where the sensor device is installed is on the upstream side of the processing position, the transport device can reduce the delay in processing. Further, the processing position, that is, the vicinity directly under the head unit may be restricted to the position where the sensor device or the like is installed. Therefore, it is desirable that the position where the sensor device is installed is closer to the first roller R1 than the processing position, that is, upstream from the processing position.
ヘッドユニットによる処理及びセンサデバイスによる検出のどちらでも、ウェブ120へ光源から光を照射する場合がある。そして、特にウェブ120の透明度が高いと、それぞれの光が外乱となる場合がある。したがって、センサデバイス及びヘッドユニットは、同じ光軸上にない方が望ましい場合がある。
Both processing by the head unit and detection by the sensor device may irradiate the
一方で、ウェブ120の透明度が高くない場合等では、センサデバイスが設置される位置は、例えば、ヘッドユニットの直下等でもよい場合がある。図示する例では、ヘッドユニットの直下は、処理位置の裏側である。すなわち、搬送方向において、処理位置と、センサデバイスが設置される位置は、ほぼ同一であって、ウェブ120の一方の面(表側)を処理対象とし、ウェブ120の他方の面(裏面)をセンサデバイスによる検出対象としても良い場合もある。
On the other hand, when the transparency of the
このように、センサデバイスがヘッドユニットの直下にあると、直下における正確な移動量等が、センサデバイスによって検出できる。したがって、それぞれの光が外乱とならない場合であって、制御等が速く行える場合であれば、センサデバイスは、ヘッドユニットの直下に近い位置にあるのが望ましい。一方で、センサデバイスは、ヘッドユニットのほぼ直下になくてもよく、直下にない場合であっても、同様の計算が行われる。 As described above, when the sensor device is directly under the head unit, the accurate amount of movement under the sensor device can be detected by the sensor device. Therefore, it is desirable that the sensor device is located near directly under the head unit if each light does not cause disturbance and control and the like can be performed quickly. On the other hand, the sensor device does not have to be almost directly under the head unit, and even if it is not directly under the head unit, the same calculation is performed.
また、誤差が許容できるのであれば、センサデバイスが設置される位置は、ヘッドユニットのほぼ直下又はローラ間INT間であって、ヘッドユニットの直下より下流となる位置等でもよい。 If the error is acceptable, the position where the sensor device is installed may be substantially directly below the head unit or between the INTs between rollers, and may be a position downstream from directly below the head unit.
また、各ヘッドユニットに対して、変位センサPS21及び変位センサPS22がそれぞれ設置される。変位センサPS21及び変位センサPS22は、それぞれヘッドユニットHD1、HD2の変位量を検出し、コントローラ520へ出力する。
Further, a displacement sensor PS21 and a displacement sensor PS22 are installed for each head unit. The displacement sensor PS21 and the displacement sensor PS22 detect the displacement amounts of the head units HD1 and HD2, respectively, and output them to the
そして、変位センサPS21及び変位センサPS22の出力に基づいて、コントローラ520は、アクチュエータコントローラCTL1、CTL2に出力する指令値を補正する。これにより、精度良く読取処理を行う処理位置の調整を行うことができる。
Then, based on the outputs of the displacement sensor PS21 and the displacement sensor PS22, the
<第3変形例>
例えば、液体を吐出する装置110は、以下のように、被搬送物をベルト等にしてもよい。
<Third modification example>
For example, the
図30は、本発明の一実施形態に係る液体を吐出する装置の第3変形例を示す概略図である。本変形例では、ヘッドユニット350C、350M、350Y及び350Kがインク滴を吐出して、転写ベルト328の外周表面上に画像を形成する。以下、ヘッドユニット350C、350M、350Y及び350Kをまとめて「ヘッドユニット群350」という。
FIG. 30 is a schematic view showing a third modification of the device for discharging the liquid according to the embodiment of the present invention. In this modification, the head units 350C, 350M, 350Y and 350K eject ink droplets to form an image on the outer peripheral surface of the
次に、乾燥機構370は、転写ベルト328上に形成された画像を乾燥させ、膜化する。
Next, the
続いて、転写ベルト328が転写ローラ330と対向する転写部において、液体を吐出する装置110は、転写ベルト328上の膜化した画像を用紙に転写する。
Subsequently, in the transfer section where the
また、クリーニングローラ323は、転写後の転写ベルト328の表面をクリーニングする。
Further, the cleaning
このように、本変形例では、液体を吐出する装置において、転写ベルト328の周りには、ヘッドユニット350C、350M、350Y、350K、乾燥機構370、クリーニングローラ323及び転写ローラ330等が設けられる。
As described above, in this modification, in the device for discharging the liquid, a head unit 350C, 350M, 350Y, 350K, a
本変形例では、転写ベルト328は、駆動ローラ321、対向ローラ322、4つの形状維持ローラ324及び8つの支持ローラ325C1、325C2、325M1、325M2、325Y1、325Y2、325K1及び325K2等に架け渡され、転写ベルト駆動モータ327によって回転する駆動ローラ321に従動して図中矢印方向に移動する。駆動ローラ321の回転によって転写ベルト328が移動する方向を移動方向とする。
In this modification, the
また、ヘッドユニット群350に対向して設けられる8つの支持ローラ325C1、325C2、325M1、325M2、325Y1、325Y2、325K1及び325K2は、各ヘッドユニット350からインク滴が吐出される際に、転写ベルト328の引張状態を維持する。そして、転写モータ331は、転写ローラ330を回転駆動する。
Further, the eight support rollers 325C1, 325C2, 325M1, 325M2, 325Y1, 325Y2, 325K1 and 325K2 provided facing the
さらに、本変形例では、支持ローラ325C1と支持ローラ325C2との間、かつ、ヘッドユニット350Cの吐出位置よりも、転写ベルト328の移動方向において上流側に、センサデバイス332Cが配置される。また、センサデバイス332Cは、スペックルセンサを有する。
Further, in this modification, the
スペックルセンサは、転写ベルト328の情報を取得するセンサの例である。また、ヘッドユニット350Cに対する支持ローラ325C1、支持ローラ325C2及びセンサデバイス332Cの位置関係と同様の位置関係で、ヘッドユニット350Mに対してもセンサデバイス332Mが設けられる。
The speckle sensor is an example of a sensor that acquires information on the
本変形例では、ヘッドユニット350M、ヘッドユニット350Y及びヘッドユニット350Kには、アクチュエータ333M、333Y及び333Kがそれぞれ設けられる。また、アクチュエータ333Mは、ヘッドユニット350Mを、転写ベルト328の移動方向と直交する方向に移動させるアクチュエータである。同様に、アクチュエータ333Y及び333Kは、それぞれヘッドユニット350Y及びヘッドユニット350Kを転写ベルト328の移動方向と直交する方向に移動させるアクチュエータである。
In this modification, the head unit 350M, the head unit 350Y, and the head unit 350K are provided with
制御基板340は、センサデバイス332C、332M、332Y及び332Kから取得した画像データに基づいて、転写ベルト328の直交方向の移動量及び転写ベルト328の移動方向の移動量等を検出する。また、制御基板340は、転写ベルト328の直交方向の移動量に応じて、アクチュエータ333M、333Y及び333Kを制御し、ヘッドユニット350M、350Y及び350Kを直交方向に移動させる。さらに、制御基板340は、転写ベルト328の移動方向の移動量に応じて、ヘッドユニット350M、350Y及び350Kの吐出タイミングを制御する。
The
さらに、制御基板340は、転写ベルト駆動モータ327、転写モータ331に駆動信号を出力する。
Further, the
また、各ヘッドユニットに対して、変位センサPS31、変位センサPS32、及び変位センサPS33がそれぞれ設置される。変位センサPS31、変位センサPS32、及び変位センサPS33は、ヘッドユニット350M、ヘッドユニット350Y、ヘッドユニット350Kの変位量をそれぞれ検出し、制御基板340へ出力する。
Further, a displacement sensor PS31, a displacement sensor PS32, and a displacement sensor PS33 are installed for each head unit. The displacement sensor PS31, the displacement sensor PS32, and the displacement sensor PS33 detect the displacement amounts of the head unit 350M, the head unit 350Y, and the head unit 350K, respectively, and output them to the
<第3変形例における効果>
本変形例によれば、転写ベルト328の移動中に、転写ベルト328が駆動ローラ321の駆動による移動方向と直交する直交方向に動いた場合にも、検出した移動量に応じて、液体を吐出する装置110は、ヘッドユニット350M、350Y及び350Kを直交方向にそれぞれ移動させることができる。また、変位センサPS31、PS32、PS33が、それぞれヘッドユニット350M、350Y、350Kの変位量を制御基板340に出力する。これにより、制御基板340は、各アクチュエータを制御する指令値を補正することができる。このため、液体を吐出する装置110は、転写ベルト328上に品質の高い画像を形成することができる。
<Effect in the third modification>
According to this modification, even when the
また、転写ベルト328が駆動ローラ321の駆動による移動方向に、想定と異なる移動量移動した場合にも、検出した移動量に応じて、液体を吐出する装置110は、ヘッドユニット350M、350Y及び350Kの吐出タイミングをそれぞれ変更することができる。このため、液体を吐出する装置110は、転写ベルト328上に品質の高い画像を形成することができる。
Further, even when the
上記の例では、センサデバイス332C、332M、332Y及び332Kから取得した画像データに基づいて、転写ベルト328の直交方向の移動量と、転写ベルト328の移動方向の移動量とを算出したが、いずれかの移動量しか使用しない場合は、一方のみを算出しても良い。
In the above example, the amount of movement in the orthogonal direction of the
また、本変形例では、ヘッドユニット350Cは、アクチュエータを備えないが、備えても良い。そして、ヘッドユニット350Cを直交方向に移動させることで、転写ベルト328から用紙に転写される際の、転写の搬送方向に直交する方向の位置を制御することができる。
Further, in this modification, the head unit 350C is not provided with an actuator, but may be provided. Then, by moving the head unit 350C in the orthogonal direction, it is possible to control the position in the direction orthogonal to the transfer transfer direction when the
なお、上記の例では、複数のヘッドユニットを用いて転写ベルト328上に画像を形成する例について記載したが、一つのヘッドユニットで画像を形成する場合にも適用可能である。
In the above example, an example of forming an image on the
さらに、例えば、本発明に係る実施形態は、ヘッドユニットがレーザを発し、レーザによって、被搬送物である基板に、パターンニングの処理を行う搬送装置等でもよい。具体的には、搬送装置は、まず、レーザヘッドを基板が搬送される搬送方向と直交する方向にライン状に並べて有する。そして、搬送装置は、基板の位置等を検出し、検出結果に基づいて、ヘッドユニットを移動させる等を行う。また、この例では、処理位置は、レーザが基板に照射される位置が処理位置となる。 Further, for example, the embodiment according to the present invention may be a transfer device or the like in which the head unit emits a laser and the substrate to be transported is subjected to patterning processing by the laser. Specifically, the transport device first has the laser heads arranged in a line in a direction orthogonal to the transport direction in which the substrate is transported. Then, the transport device detects the position of the substrate and the like, and moves the head unit or the like based on the detection result. Further, in this example, the processing position is the position where the laser irradiates the substrate.
さらに、搬送装置が有するヘッドユニットは、複数でなくともよい。すなわち、被搬送物に対して、基準となる位置に、処理を行い続ける等の場合には、本発明は、適用可能である。 Further, the transport device does not have to have a plurality of head units. That is, the present invention is applicable when the processing is continuously performed at the reference position with respect to the transported object.
また、本発明に係る実施形態では、搬送装置の制御装置、情報処理装置又はこれらの組み合わせ等のコンピュータに液体を吐出させる方法のうち、一部又は全部を実行させるためのプログラムによって実現されてもよい。 Further, in the embodiment of the present invention, even if it is realized by a program for executing a part or all of the methods of discharging liquid to a computer such as a control device of a transport device, an information processing device, or a combination thereof. good.
以上、本発明の好ましい実施例について詳述したが、本発明は係る特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形又は変更が可能である。 Although the preferred embodiments of the present invention have been described in detail above, the present invention is not limited to the specific embodiment, and various modifications are made within the scope of the gist of the present invention described in the claims. Or it can be changed.
110 液体を吐出する装置
120 ウェブ
210K ブラック液体吐出ヘッドユニット
210C シアン液体吐出ヘッドユニット
210M マゼンタ液体吐出ヘッドユニット
210Y イエロー液体吐出ヘッドユニット
SENK ブラック用センサ
SENC シアン用センサ
SENM マゼンタ用センサ
SENY イエロー用センサ
520 コントローラ
S1 第1センサデータ
S2 第2センサデータ
DIF 偏差
COM1 第1指令値
COM2 第2指令値
COM3 第3指令値
COM4 第4指令値
PD1 第1変位量
PD2 第2変位量
PD3 第3変位量
PD4 第4変位量
CO 補正値
Tc 制御周期
110
Claims (11)
前記ヘッドユニットを搬送方向と直交する直交方向へ移動させるアクチュエータと、
前記アクチュエータを制御するアクチュエータコントローラと、
前記アクチュエータによる移動に伴う前記ヘッドユニットの変位量を検知する変位センサと、
前記直交方向の前記被搬送物の位置、移動速度、移動量又はこれらの組み合わせを示す検出結果と、前記変位センサの出力と、に基づいて前記アクチュエータコントローラへ指令値を出力するコントローラと、を備え、
前記コントローラは、前記検出結果に応じた指令値が示す移動量と、当該指令値で動作させた際の前記変位センサの出力が示す変位量との差分に基づいて、前記変位量が振動する振動周期、前記振動周期の整数倍となる周期ごとに、前記指令値を補正する補正値を計算する搬送装置。 A transport device having a head unit and processing an object to be transported by the head unit.
An actuator that moves the head unit in a direction orthogonal to the transport direction,
An actuator controller that controls the actuator and
A displacement sensor that detects the amount of displacement of the head unit due to movement by the actuator, and
It is provided with a detection result indicating the position, moving speed, moving amount or a combination thereof in the orthogonal direction, and a controller that outputs a command value to the actuator controller based on the output of the displacement sensor. ,
The controller vibrates based on the difference between the movement amount indicated by the command value according to the detection result and the displacement amount indicated by the output of the displacement sensor when operated at the command value. A transport device that calculates a correction value for correcting the command value for each cycle, which is an integral multiple of the vibration cycle .
前記ヘッドユニットを搬送方向と直交する直交方向へ移動させるアクチュエータと、An actuator that moves the head unit in a direction orthogonal to the transport direction,
前記アクチュエータを制御するアクチュエータコントローラと、An actuator controller that controls the actuator and
前記アクチュエータによる移動に伴う前記ヘッドユニットの変位量を検知する変位センサと、A displacement sensor that detects the amount of displacement of the head unit due to movement by the actuator, and
前記直交方向の前記被搬送物の位置、移動速度、移動量又はこれらの組み合わせを示す検出結果と、前記変位センサの出力と、に基づいて前記アクチュエータコントローラへ指令値を出力するコントローラと、を備え、It is provided with a detection result indicating the position, moving speed, moving amount or a combination thereof in the orthogonal direction, and a controller that outputs a command value to the actuator controller based on the output of the displacement sensor. ,
前記コントローラは、前記変位量が振動する振動周期、前記振動周期の整数倍となる周期ごとに、前記指令値を計算する搬送装置。The controller is a transfer device that calculates the command value for each vibration cycle in which the displacement amount vibrates and a cycle that is an integral multiple of the vibration cycle.
請求項1又は2に記載の搬送装置。 The controller calculates the difference between the movement amount indicated by the command value according to the detection result and the displacement amount indicated by the output of the displacement sensor when operated at the command value a plurality of times, and the difference of the plurality of times. Calculate the correction value to correct the command value based on
The transport device according to claim 1 or 2 .
請求項1乃至3のいずれか1項に記載の搬送装置。 The controller obtains the detection result from the output of the object to be detected sensor provided corresponding to the head unit.
The transport device according to any one of claims 1 to 3 .
請求項4に記載の搬送装置。 The transported object detection sensor is a sensor that detects information regarding the uneven shape formed on the surface or inside of the transported object.
The transport device according to claim 4 .
請求項4に記載の搬送装置。 The object to be transported detection sensor is a sensor that detects an edge in an orthogonal direction orthogonal to the transport direction of the object to be transported.
The transport device according to claim 4 .
請求項4乃至6のいずれか1項に記載の搬送装置。 The object to be transported detection sensor is an optical sensor.
The transport device according to any one of claims 4 to 6 .
前記処理位置よりも前記搬送方向の下流側に設けられた第2の支持部材と、を備え、
前記第1の支持部材及び前記第2の支持部材の間に、前記被搬送物検知センサを備える、
請求項4乃至7のいずれか1項に記載の搬送装置。 A first support member provided on the upstream side in the transport direction from the processing position where the head unit processes the object to be transported, and
A second support member provided on the downstream side in the transport direction from the processing position is provided.
The object to be transported detection sensor is provided between the first support member and the second support member.
The transport device according to any one of claims 4 to 7 .
請求項1乃至8のいずれか1項に記載の搬送装置。 The head unit is a liquid discharge head unit that discharges liquid to the object to be transported.
The transport device according to any one of claims 1 to 8 .
前記ヘッドユニットを搬送方向と直交する直交方向へ移動させるアクチュエータと、
前記アクチュエータを制御するアクチュエータコントローラと、
前記アクチュエータによる移動に伴う前記ヘッドユニットの変位量を検知する変位センサと、
前記直交方向の前記被搬送物の位置、移動速度、移動量又はこれらの組み合わせを示す検出結果と、前記変位センサの出力と、に基づいて前記アクチュエータコントローラへ指令値を出力するコントローラと、を備え、
前記コントローラは、前記変位量が振動する振動周期、前記振動周期の整数倍となる周期ごとに、前記指令値を計算する搬送システム。 A transport system having a head unit and having one or more devices that process the transported object by the head unit.
An actuator that moves the head unit in a direction orthogonal to the transport direction,
An actuator controller that controls the actuator and
A displacement sensor that detects the amount of displacement of the head unit due to movement by the actuator, and
It is provided with a detection result indicating the position, moving speed, moving amount or a combination thereof in the orthogonal direction, and a controller that outputs a command value to the actuator controller based on the output of the displacement sensor. ,
The controller is a transfer system that calculates the command value for each vibration cycle in which the displacement amount vibrates and a cycle that is an integral multiple of the vibration cycle .
前記アクチュエータによる移動に伴う前記ヘッドユニットの変位量を検知する検知手順と、
アクチュエータコントローラにより、前記アクチュエータを制御する手順と、
コントローラにより、前記直交方向の前記被搬送物の位置、移動速度、移動量又はこれらの組み合わせを示す検出結果と、前記変位量とに基づいて、前記アクチュエータコントローラへ指令値を出力する手順と、を含み、
前記コントローラは、前記変位量が振動する振動周期、前記振動周期の整数倍となる周期ごとに、前記指令値を計算するヘッドユニットの位置を調整する方法。 It is a method of adjusting the position of the head unit performed by a transport device having a head unit that processes the transported object and an actuator that moves the head unit in an orthogonal direction orthogonal to the transport direction. hand,
A detection procedure for detecting the amount of displacement of the head unit due to movement by the actuator, and
The procedure for controlling the actuator by the actuator controller and
A procedure for outputting a command value to the actuator controller based on a detection result indicating the position, moving speed, moving amount or a combination thereof in the orthogonal direction by the controller and the displacement amount . Including,
The controller is a method of adjusting the position of the head unit for calculating the command value for each vibration cycle in which the displacement amount vibrates and a cycle in which the displacement amount is an integral multiple of the vibration cycle .
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/926,910 US10639916B2 (en) | 2017-03-21 | 2018-03-20 | Conveyance device, conveyance system, and head unit position adjusting method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017054029 | 2017-03-21 | ||
| JP2017054029 | 2017-03-21 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018158574A JP2018158574A (en) | 2018-10-11 |
| JP2018158574A5 JP2018158574A5 (en) | 2021-05-13 |
| JP7098979B2 true JP7098979B2 (en) | 2022-07-12 |
Family
ID=63795385
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018050039A Active JP7098979B2 (en) | 2017-03-21 | 2018-03-16 | How to adjust the position of the transfer device, transfer system and head unit |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7098979B2 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7363623B2 (en) * | 2020-03-19 | 2023-10-18 | 株式会社リコー | Device for dispensing liquid, system for dispensing liquid, and method for dispensing liquid |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003205654A (en) | 2002-01-11 | 2003-07-22 | Brother Ind Ltd | Imaging apparatus |
| US20130293612A1 (en) | 2012-05-02 | 2013-11-07 | Xerox Corporation | Method and System for Aligning Printheads that Eject Clear Ink in an Inkjet Printer |
| JP2014189337A (en) | 2013-03-26 | 2014-10-06 | Dainippon Screen Mfg Co Ltd | Image recording apparatus and correction method |
| JP2016083936A (en) | 2014-10-23 | 2016-05-19 | 株式会社リコー | Alignment of print head in print system |
-
2018
- 2018-03-16 JP JP2018050039A patent/JP7098979B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003205654A (en) | 2002-01-11 | 2003-07-22 | Brother Ind Ltd | Imaging apparatus |
| US20130293612A1 (en) | 2012-05-02 | 2013-11-07 | Xerox Corporation | Method and System for Aligning Printheads that Eject Clear Ink in an Inkjet Printer |
| JP2014189337A (en) | 2013-03-26 | 2014-10-06 | Dainippon Screen Mfg Co Ltd | Image recording apparatus and correction method |
| JP2016083936A (en) | 2014-10-23 | 2016-05-19 | 株式会社リコー | Alignment of print head in print system |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018158574A (en) | 2018-10-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11618250B2 (en) | Liquid ejection apparatus, liquid ejection system, and liquid ejection method | |
| US20200171846A1 (en) | Liquid ejection apparatus, liquid ejection system, and liquid ejection method | |
| EP3219497B1 (en) | Liquid ejection apparatus and liquid ejection method | |
| US10639916B2 (en) | Conveyance device, conveyance system, and head unit position adjusting method | |
| JP6926701B2 (en) | Object detection device, transport device, processing device, dirt removal method and program | |
| JP7073928B2 (en) | Conveyor device, liquid discharge device, reading device, image forming device, control method of the transfer device | |
| JP7119453B2 (en) | Conveying device, conveying system, and timing adjustment method | |
| JP6930257B2 (en) | Items to be transported and liquid discharge device | |
| JP7005893B2 (en) | Liquid discharge device, liquid discharge system and liquid discharge method | |
| JP6977254B2 (en) | Liquid discharge device, liquid discharge system and liquid discharge method | |
| JP7000687B2 (en) | Liquid discharge device and liquid discharge system | |
| JP7098979B2 (en) | How to adjust the position of the transfer device, transfer system and head unit | |
| JP7040070B2 (en) | Transport equipment, transport system and processing method | |
| JP6801479B2 (en) | Liquid discharge device, liquid discharge system and liquid discharge method | |
| JP7010074B2 (en) | Image forming apparatus, image forming system and processing position moving method | |
| JP6911421B2 (en) | Transport equipment, transport system and processing method | |
| JP7047247B2 (en) | Liquid discharge device, liquid discharge system and liquid discharge method | |
| JP7039873B2 (en) | Liquid discharge device, liquid discharge method and liquid discharge system | |
| JP7019974B2 (en) | Image forming device and image forming method | |
| JP7087504B2 (en) | Transport equipment, transport system and control method | |
| JP7067248B2 (en) | Detection device, processing device, liquid discharge device, reading device and adjustment method | |
| JP7066985B2 (en) | Transport device, liquid discharge device and attitude detection method | |
| JP7119456B2 (en) | Apparatus for ejecting liquid, method for ejecting liquid | |
| US20230109757A1 (en) | Liquid discharge apparatus and detection method | |
| WO2018230576A1 (en) | Transfer apparatus, liquid ejection apparatus, reading apparatus, image forming apparatus, control method of the transfer apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210118 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210331 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20211124 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211207 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220204 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220531 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220613 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7098979 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |