JP7067561B2 - 採点方法、採点プログラムおよび採点装置 - Google Patents
採点方法、採点プログラムおよび採点装置 Download PDFInfo
- Publication number
- JP7067561B2 JP7067561B2 JP2019540162A JP2019540162A JP7067561B2 JP 7067561 B2 JP7067561 B2 JP 7067561B2 JP 2019540162 A JP2019540162 A JP 2019540162A JP 2019540162 A JP2019540162 A JP 2019540162A JP 7067561 B2 JP7067561 B2 JP 7067561B2
- Authority
- JP
- Japan
- Prior art keywords
- posture
- evaluation
- athlete
- specified
- joint
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images































Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/20—Movements or behaviour, e.g. gesture recognition
- G06V40/23—Recognition of whole body movements, e.g. for sport training
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0003—Analysing the course of a movement or motion sequences during an exercise or trainings sequence, e.g. swing for golf or tennis
- A63B24/0006—Computerised comparison for qualitative assessment of motion sequences or the course of a movement
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0062—Monitoring athletic performances, e.g. for determining the work of a user on an exercise apparatus, the completed jogging or cycling distance
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0087—Electric or electronic controls for exercising apparatus of groups A63B21/00 - A63B23/00, e.g. controlling load
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B71/00—Games or sports accessories not covered in groups A63B1/00 - A63B69/00
- A63B71/06—Indicating or scoring devices for games or players, or for other sports activities
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B71/00—Games or sports accessories not covered in groups A63B1/00 - A63B69/00
- A63B71/06—Indicating or scoring devices for games or players, or for other sports activities
- A63B71/0619—Displays, user interfaces and indicating devices, specially adapted for sport equipment, e.g. display mounted on treadmills
- A63B71/0622—Visual, audio or audio-visual systems for entertaining, instructing or motivating the user
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/74—Image or video pattern matching; Proximity measures in feature spaces
- G06V10/75—Organisation of the matching processes, e.g. simultaneous or sequential comparisons of image or video features; Coarse-fine approaches, e.g. multi-scale approaches; using context analysis; Selection of dictionaries
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/40—Scenes; Scene-specific elements in video content
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0062—Monitoring athletic performances, e.g. for determining the work of a user on an exercise apparatus, the completed jogging or cycling distance
- A63B2024/0065—Evaluating the fitness, e.g. fitness level or fitness index
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0062—Monitoring athletic performances, e.g. for determining the work of a user on an exercise apparatus, the completed jogging or cycling distance
- A63B2024/0071—Distinction between different activities, movements, or kind of sports performed
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B71/00—Games or sports accessories not covered in groups A63B1/00 - A63B69/00
- A63B71/06—Indicating or scoring devices for games or players, or for other sports activities
- A63B71/0619—Displays, user interfaces and indicating devices, specially adapted for sport equipment, e.g. display mounted on treadmills
- A63B71/0622—Visual, audio or audio-visual systems for entertaining, instructing or motivating the user
- A63B2071/0636—3D visualisation
Description
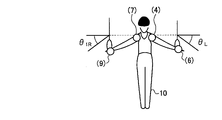
θ1R=asin[Z7-Z9]/sqrt{(X9-X7)^2+(Y9-Y7)^2+(Z9-Z7)^2}・・・(2a)
Lx=(Y11-Y10)(Z2-Z0)-(Z11-Z10)(Y2-Y0)・・・(5a)
Ly=(Z11-Z10)(X2-X0)-(X11-X10)(Z2-Z0)・・・(6a)
Lz=(X11-X10)(Y2-Y0)-(Y11-Y10)(X2-X0)・・・(7a)
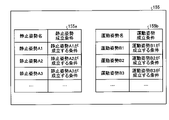
評価項目1A:ほぼ静止した懸垂状態から開始する。(ステップS10)
評価項目2A:逆上がりの最中に伸身の姿勢並びに、伸腕の状態を維持する。(ステップS11)
評価項目3A:2回目の静止姿勢において、十字懸垂(もしくは脚前拳十字懸垂)としての成立要件を満たす。(ステップS12)
評価項目4A:一定時間の静止が認められる。(ステップS13)
161 登録部
162 抽出部
163 3Dモデル生成部
164 評価部
165 出力部
Claims (7)
- コンピュータが実行する採点方法であって、
採点競技の競技者を測定したセンサデータを取得し、
前記センサデータの解析結果に基づき、前記競技者の関節情報を抽出し、
一連の関節の位置と関節の角度とで指定される姿勢、複数の評価項目のうち前記姿勢に対応する評価項目、および、前記採点競技の出来栄えを評価する評価指標であって前記評価項目に対応する評価指標の関係を定義したルールと、前記競技者の関節情報から特定される前記競技者の姿勢とを基にして、前記複数の評価項目の中から前記競技者の姿勢の評価に適した評価項目を特定し、
前記競技者の姿勢の評価に適した評価項目に対応付けられた評価指標と、前記競技者の関節情報とに基づき、前記競技者の演技の中での前記競技者の姿勢から特定される技の成立不成立と前記技の完成度とを評価する
処理を実行し、
前記ルールに定義される姿勢には、前記一連の関節の位置と関節の角度とで指定される静止姿勢と複数の静止姿勢の組み合せからなる運動姿勢とが含まれ、
前記特定する処理は、前記競技者の関節情報の時系列の変化から前記競技者の演技の中での前記競技者の複数の静止姿勢のそれぞれを特定し、特定した前記複数の静止姿勢のそれぞれの組み合せに対応する運動姿勢を特定し、特定した前記運動姿勢に応じた評価項目を特定し、
前記評価する処理は、前記運動姿勢の評価項目の評価指標に含まれる前記複数の静止姿勢の成立条件と、前記競技者の関節情報の時系列の変化から特定される前記複数の静止姿勢とを比較して、前記複数の静止姿勢の成立条件を満たす場合に、前記運動姿勢が成立したと評価する、
ことを特徴とする採点方法。 - 前記評価指標は、前記評価項目に対応づけて、演技の中での技が成立する姿勢の条件を含み、前記評価する処理は、前記評価項目に対応する関節情報から得られる前記競技者の姿勢と、前記条件とを比較して、前記技の成立不成立を評価することを特徴とする請求項1に記載の採点方法。
- 前記評価指標は、前記評価項目に対応づけて、所定の演技の中の理想的な一連の関節の位置の情報を含み、前記評価する処理は、前記評価項目に対応する関節情報から得られる前記競技者の一連の関節の位置と、前記理想的な一連の関節の位置との乖離具合を基にして、前記完成度を評価することを特徴とする請求項1または2に記載の採点方法。
- 前記評価の結果を出力し、前記演技の中の特定の時点の指定を受け付け、前記特定の時点に対応する実際の競技者の関節情報から得られた前記評価項目の値を、指定された第一の時点に対応するセンサデータから得られた競技者の関節情報に基づく3Dモデルとともに、表示する処理を更に実行することを特徴とする請求項1に記載の採点方法。
- 前記評価の結果を出力し、前記演技の区間のセンサデータのうちの、特定の区間に対応するセンサデータに基づき、関節同士の距離の推移、ある関節または特定の部位と基準平面との距離の推移、ある関節または特定の部位と基準平面とのなす角度の推移を表示する処理を更に実行することを特徴とする請求項1に記載の採点方法。
- コンピュータに、
採点競技の競技者を測定したセンサデータを取得し、
前記センサデータの解析結果に基づき、前記競技者の関節情報を抽出し、
一連の関節の位置と関節の角度とで指定される姿勢、複数の評価項目のうち前記姿勢に対応する評価項目、および、前記採点競技の出来栄えを評価する評価指標であって前記評価項目に対応する評価指標の関係を定義したルールと、前記競技者の関節情報から特定される前記競技者の姿勢とを基にして、前記複数の評価項目の中から前記競技者の姿勢の評価に適した評価項目を特定し、
前記競技者の姿勢の評価に適した評価項目に対応付けられた評価指標と、前記競技者の関節情報とに基づき、前記競技者の演技の中での前記競技者の姿勢から特定される技の成立不成立と前記技の完成度とを評価する
処理を実行させ、
前記ルールに定義される姿勢には、前記一連の関節の位置と関節の角度とで指定される静止姿勢と複数の静止姿勢の組み合せからなる運動姿勢とが含まれ、
前記特定する処理は、前記競技者の関節情報の時系列の変化から前記競技者の演技の中での前記競技者の複数の静止姿勢のそれぞれを特定し、特定した前記複数の静止姿勢のそれぞれの組み合せに対応する運動姿勢を特定し、特定した前記運動姿勢に応じた評価項目を特定し、
前記評価する処理は、前記運動姿勢の評価項目の評価指標に含まれる前記複数の静止姿勢の成立条件と、前記競技者の関節情報の時系列の変化から特定される前記複数の静止姿勢とを比較して、前記複数の静止姿勢の成立条件を満たす場合に、前記運動姿勢が成立したと評価する、
ことを特徴とする採点プログラム。 - 採点競技の競技者を測定したセンサデータを取得し、前記センサデータの解析結果に基づき、前記競技者の関節情報を抽出する抽出部と、
一連の関節の位置と関節の角度とで指定される姿勢、複数の評価項目のうち前記姿勢に対応する評価項目、および、前記採点競技の出来栄えを評価する評価指標であって前記評価項目に対応する評価指標の関係を定義したルールと、前記競技者の関節情報から特定される前記競技者の姿勢とを基にして、前記複数の評価項目の中から前記競技者の姿勢の評価に適した評価項目を特定し、
前記競技者の姿勢の評価に適した評価項目に付けられた評価指標と、前記競技者の関節情報とに基づき、前記競技者の演技の中での前記競技者の姿勢から特定される技の成立不成立と前記技の完成度とを評価する評価部とを有し、
前記ルールに定義される姿勢には、前記一連の関節の位置と関節の角度とで指定される静止姿勢と複数の静止姿勢の組み合せからなる運動姿勢とが含まれ、
前記評価部は、前記競技者の関節情報の時系列の変化から前記競技者の演技の中での前記競技者の複数の静止姿勢のそれぞれを特定し、特定した前記複数の静止姿勢のそれぞれの組み合せに対応する運動姿勢を特定し、特定した前記運動姿勢に応じた評価項目を特定し、前記運動姿勢の評価項目の評価指標に含まれる前記複数の静止姿勢の成立条件と、前記競技者の関節情報の時系列の変化から特定される前記複数の静止姿勢とを比較して、前記複数の静止姿勢の成立条件を満たす場合に、前記運動姿勢が成立したと評価する、
ことを特徴とする採点装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2017/032000 WO2019049216A1 (ja) | 2017-09-05 | 2017-09-05 | 採点方法、採点プログラムおよび採点装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2019049216A1 JPWO2019049216A1 (ja) | 2020-07-30 |
| JP7067561B2 true JP7067561B2 (ja) | 2022-05-16 |
Family
ID=65634906
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019540162A Active JP7067561B2 (ja) | 2017-09-05 | 2017-09-05 | 採点方法、採点プログラムおよび採点装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11645872B2 (ja) |
| EP (1) | EP3679994A4 (ja) |
| JP (1) | JP7067561B2 (ja) |
| CN (1) | CN111093782A (ja) |
| WO (1) | WO2019049216A1 (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111527520A (zh) * | 2017-12-27 | 2020-08-11 | 富士通株式会社 | 提取程序、提取方法以及信息处理装置 |
| USD884742S1 (en) * | 2018-09-14 | 2020-05-19 | Fujitsu Limited | Display screen with icons |
| USD880527S1 (en) * | 2018-09-14 | 2020-04-07 | Fujitsu Limited | Display screen with icons |
| USD881237S1 (en) * | 2018-09-14 | 2020-04-14 | Fujitsu Limited | Display screen with icons |
| USD883328S1 (en) * | 2018-09-14 | 2020-05-05 | Fujitsu Limited | Display screen with icons |
| USD892863S1 (en) * | 2018-09-14 | 2020-08-11 | Fujitsu Limited | Display screen with icons |
| USD884741S1 (en) * | 2018-09-14 | 2020-05-19 | Fujitsu Limited | Display screen with icons |
| USD879149S1 (en) * | 2018-09-14 | 2020-03-24 | Fujitsu Limited | Display screen with icons |
| TWI733616B (zh) * | 2020-11-04 | 2021-07-11 | 財團法人資訊工業策進會 | 人體姿勢辨識系統、人體姿勢辨識方法以及非暫態電腦可讀取儲存媒體 |
| EP4276739A1 (en) | 2021-01-05 | 2023-11-15 | Fujitsu Limited | Skeleton estimation device, skeleton estimation method, and gymnastics scoring support system |
| CN112906670A (zh) * | 2021-04-08 | 2021-06-04 | 中山大学附属口腔医院 | 一种口腔医生操作术者体位监测系统 |
| CN113713353B (zh) * | 2021-05-12 | 2022-05-31 | 北京冰锋科技有限责任公司 | 一种跳台滑雪运动员的技术动作获取方法及系统 |
| JP7158534B1 (ja) | 2021-06-16 | 2022-10-21 | 三菱電機株式会社 | 行動解析装置、行動解析方法及び行動解析プログラム |
| JP2023098484A (ja) | 2021-12-28 | 2023-07-10 | 富士通株式会社 | 情報処理プログラム、情報処理方法および情報処理装置 |
| JP2023098483A (ja) | 2021-12-28 | 2023-07-10 | 富士通株式会社 | 情報処理プログラム、情報処理方法および情報処理装置 |
| JP2023098506A (ja) | 2021-12-28 | 2023-07-10 | 富士通株式会社 | 情報処理プログラム、情報処理方法および情報処理装置 |
| JP2023098482A (ja) | 2021-12-28 | 2023-07-10 | 富士通株式会社 | 情報処理プログラム、情報処理方法および情報処理装置 |
| JP2024013129A (ja) | 2022-07-19 | 2024-01-31 | 富士通株式会社 | 表示制御プログラム、表示制御方法および情報処理装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120310390A1 (en) | 2009-12-24 | 2012-12-06 | Jason Mccarthy | Fight analysis system |
| JP2014502178A (ja) | 2010-11-05 | 2014-01-30 | ナイキ インターナショナル リミテッド | 自動化個人トレーニングのための方法およびシステム |
| JP2014133015A (ja) | 2013-01-11 | 2014-07-24 | Akita Univ | 身体動作学習支援装置 |
| JP2015116308A (ja) | 2013-12-18 | 2015-06-25 | 三菱電機株式会社 | ジェスチャ登録装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10803762B2 (en) * | 2013-04-02 | 2020-10-13 | Nec Solution Innovators, Ltd | Body-motion assessment device, dance assessment device, karaoke device, and game device |
| JP2015061579A (ja) * | 2013-07-01 | 2015-04-02 | 株式会社東芝 | 動作情報処理装置 |
| CN104157107B (zh) * | 2014-07-24 | 2016-05-18 | 燕山大学 | 一种基于Kinect传感器的人体姿势矫正装置 |
| KR101576106B1 (ko) | 2014-10-14 | 2015-12-10 | 순천향대학교 산학협력단 | 깊이 카메라를 이용한 인체골격 기반의 태권도 품새 인식 및 승단 심사 장치 와 그 방법 |
| CN107080940A (zh) * | 2017-03-07 | 2017-08-22 | 中国农业大学 | 基于深度相机Kinect的体感交互转换方法及装置 |
| JP6813086B2 (ja) * | 2017-05-15 | 2021-01-13 | 富士通株式会社 | 演技表示プログラム、演技表示方法および演技表示装置 |
-
2017
- 2017-09-05 EP EP17924726.7A patent/EP3679994A4/en active Pending
- 2017-09-05 WO PCT/JP2017/032000 patent/WO2019049216A1/ja unknown
- 2017-09-05 JP JP2019540162A patent/JP7067561B2/ja active Active
- 2017-09-05 CN CN201780094546.XA patent/CN111093782A/zh active Pending
-
2020
- 2020-02-27 US US16/802,596 patent/US11645872B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120310390A1 (en) | 2009-12-24 | 2012-12-06 | Jason Mccarthy | Fight analysis system |
| JP2014502178A (ja) | 2010-11-05 | 2014-01-30 | ナイキ インターナショナル リミテッド | 自動化個人トレーニングのための方法およびシステム |
| JP2014133015A (ja) | 2013-01-11 | 2014-07-24 | Akita Univ | 身体動作学習支援装置 |
| JP2015116308A (ja) | 2013-12-18 | 2015-06-25 | 三菱電機株式会社 | ジェスチャ登録装置 |
Non-Patent Citations (4)
| Title |
|---|
| 体操「自動採点」 富士通、世界標準作りへの挑戦,日本,日本経済新聞,2017年08月09日,第1頁第1行-第7頁第3行,http://www.nikkei.com/article/DGXMZO18991720Z10C17A7000000/ |
| 技術者のためのオリンピック観戦ガイド2016>>>Part2 設備編,日経ものづくり 第743号,日本,2016年08月01日 |
| 柴田 傑 Takeshi SHIBATA,学習者中心のインタラクティブ舞踊学習支援システムの開発 Development of User-Oriented Interactive Dance Learning Assistant System,電子情報通信学会論文誌D VolumeJ97-D No.5,日本,2014年05月01日,第J97-D巻 |
| 辛 貞殷 Jeongeun SHIN,動画像処理によるスポーツ運動解析の研究,電子情報通信学会技術研究報告 Vol.108 No.46 IEICE Technical Report,日本,2008年05月15日,第108巻 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2019049216A1 (ja) | 2019-03-14 |
| JPWO2019049216A1 (ja) | 2020-07-30 |
| US11645872B2 (en) | 2023-05-09 |
| EP3679994A4 (en) | 2020-09-30 |
| US20200188736A1 (en) | 2020-06-18 |
| EP3679994A1 (en) | 2020-07-15 |
| CN111093782A (zh) | 2020-05-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7067561B2 (ja) | 採点方法、採点プログラムおよび採点装置 | |
| JP6915701B2 (ja) | 抽出プログラム、抽出方法および情報処理装置 | |
| JP6703199B2 (ja) | 動作状態評価システム、動作状態評価装置、動作状態評価サーバ、動作状態評価方法、および動作状態評価プログラム | |
| Chen et al. | Computer-assisted yoga training system | |
| US9878206B2 (en) | Method for interactive training and analysis | |
| US20200193866A1 (en) | Non-transitory computer readable recording medium, practice assist method, and practice assist system | |
| US9025824B2 (en) | Systems and methods for evaluating physical performance | |
| US8428357B2 (en) | Systems and methods for performance training | |
| CN111265840B (zh) | 显示方法、信息处理设备和计算机可读记录介质 | |
| US11776134B2 (en) | Non-transitory computer readable recording medium, element recognition method, and element recognition system | |
| CN111514584B (zh) | 游戏控制方法及装置、游戏终端及存储介质 | |
| CN105664467B (zh) | 一种肢体运动监测方法及装置 | |
| WO2020259858A1 (en) | Framework for recording and analysis of movement skills | |
| WO2018207388A1 (ja) | モーションキャプチャに関するプログラム、装置および方法 | |
| WO2020241738A1 (ja) | トレーニング支援方法及び装置 | |
| TW201416112A (zh) | 體感遊戲動作指導系統及方法 | |
| WO2019229818A1 (ja) | 表示方法、表示プログラムおよび情報処理装置 | |
| Charbonneau et al. | Should all athletes use the same twisting strategy? The role of anthropometry in the personalization of optimal acrobatic techniques | |
| Madera-Ramirez et al. | A Computer Graphics Program to Make Exercises Using the Kinect Device | |
| TWI396110B (zh) | From the plane image of the establishment of three human space center of gravity and computer program products | |
| JP2022179034A (ja) | プログラム、情報処理装置および情報処理方法 | |
| AU2011338407B2 (en) | Systems and methods for performance training | |
| Livesu et al. | Knee Up: an Exercise Game for Standing Knee Raises by Motion Capture with RGB-D Sensor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200205 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200205 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210330 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20210528 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210729 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20211026 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220120 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20220120 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20220128 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20220201 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220329 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220411 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7067561 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |