JP7010901B2 - Haps通信システムにおける動的サイトダイバーシチ - Google Patents
Haps通信システムにおける動的サイトダイバーシチ Download PDFInfo
- Publication number
- JP7010901B2 JP7010901B2 JP2019135682A JP2019135682A JP7010901B2 JP 7010901 B2 JP7010901 B2 JP 7010901B2 JP 2019135682 A JP2019135682 A JP 2019135682A JP 2019135682 A JP2019135682 A JP 2019135682A JP 7010901 B2 JP7010901 B2 JP 7010901B2
- Authority
- JP
- Japan
- Prior art keywords
- communication
- relay device
- feeder link
- communication relay
- station
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004891 communication Methods 0.000 title claims description 386
- 230000006866 deterioration Effects 0.000 claims description 38
- 238000012545 processing Methods 0.000 claims description 27
- 230000002123 temporal effect Effects 0.000 claims description 18
- 238000005259 measurement Methods 0.000 claims description 15
- 238000000034 method Methods 0.000 description 39
- 230000006870 function Effects 0.000 description 22
- 230000005540 biological transmission Effects 0.000 description 19
- 238000010295 mobile communication Methods 0.000 description 19
- 238000010586 diagram Methods 0.000 description 17
- 230000003287 optical effect Effects 0.000 description 14
- 238000007667 floating Methods 0.000 description 10
- 238000007726 management method Methods 0.000 description 10
- 230000008569 process Effects 0.000 description 8
- 238000012544 monitoring process Methods 0.000 description 7
- 238000001514 detection method Methods 0.000 description 6
- 238000010248 power generation Methods 0.000 description 5
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 5
- 230000015572 biosynthetic process Effects 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 4
- 230000008520 organization Effects 0.000 description 4
- 238000012546 transfer Methods 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 3
- 239000000203 mixture Substances 0.000 description 3
- 241000760358 Enodes Species 0.000 description 2
- 230000003416 augmentation Effects 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 239000007789 gas Substances 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 238000012806 monitoring device Methods 0.000 description 2
- 230000008859 change Effects 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000012217 deletion Methods 0.000 description 1
- 230000037430 deletion Effects 0.000 description 1
- 239000001307 helium Substances 0.000 description 1
- 229910052734 helium Inorganic materials 0.000 description 1
- SWQJXJOGLNCZEY-UHFFFAOYSA-N helium atom Chemical compound [He] SWQJXJOGLNCZEY-UHFFFAOYSA-N 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000013307 optical fiber Substances 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
Images



















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B7/00—Radio transmission systems, i.e. using radiation field
- H04B7/14—Relay systems
- H04B7/15—Active relay systems
- H04B7/185—Space-based or airborne stations; Stations for satellite systems
- H04B7/18502—Airborne stations
- H04B7/18504—Aircraft used as relay or high altitude atmospheric platform
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W16/00—Network planning, e.g. coverage or traffic planning tools; Network deployment, e.g. resource partitioning or cells structures
- H04W16/24—Cell structures
- H04W16/28—Cell structures using beam steering
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02D—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN INFORMATION AND COMMUNICATION TECHNOLOGIES [ICT], I.E. INFORMATION AND COMMUNICATION TECHNOLOGIES AIMING AT THE REDUCTION OF THEIR OWN ENERGY USE
- Y02D30/00—Reducing energy consumption in communication networks
- Y02D30/70—Reducing energy consumption in communication networks in wireless communication networks
Description
前記通信中継装置において、フィーダリンク用のアンテナの機械的な駆動又は前記フィーダリンクにおける信号処理により前記ゲートウェイ局の方向を向くように前記フィーダリンク通信部の指向性ビームを制御してもよい。
前記通信中継装置において、前記サービスリンクのセルの地上又は海上におけるフットプリントの位置及び形状を維持可能な範囲内で移動してもよい。
前記通信中継装置において、当該通信中継装置を移動させた後又は当該通信中継装置の移動中に、前記サービスリンクのセルの地上又は海上におけるフットプリントの位置及び形状を当該通信中継装置の移動前の前記フットプリントの位置及び形状に維持するように前記サービスリンク通信部の指向性ビームを制御してもよい。
前記通信中継装置において、前記フィーダリンクの無線伝搬路における局所的な伝搬損失増大部の発生に影響する気象情報を取得し、前記気象情報に基づいて、前記フィーダリンクの無線伝搬路における前記通信品質の低下を抑制又は回避できる位置に移動してもよい。
前記通信中継装置において、前記フィーダリンクの無線伝搬路における局所的な伝搬損失増大部の発生に影響する気象の時間的変動又は空間的変動を検知又は予測し、前記気象の時間的変動又は空間的変動の検知結果又は予測結果に基づいて、前記フィーダリンクの無線伝搬路における前記通信品質の低下を抑制又は回避できる位置に移動してもよい。
前記通信中継装置において、前記ゲートウェイ局との間のフィーダリンクと、前記ゲートウェイ局とは異なる場所に位置するように地上又は海上に設けた無線装置との間のリンクとを含む、複数リンクの無線伝搬路における伝搬損失又は無線信号減衰量を測定し、前記測定の結果に基づいて、前記気象の空間的変動を検知又は予測してもよい。
前記通信中継装置において、前記ゲートウェイ局と前記通信中継装置との間のフィーダリンクの無線伝搬路における伝搬損失又は無線信号減衰量を測定し、前記測定の結果に基づいて、前記フィーダリンクの無線伝搬路における前記通信品質の低下を抑制又は回避できる位置に移動してもよい。
前記通信中継装置において、当該通信中継装置が移動した先で前記フィーダリンクの無線信号の減衰量若しくは伝搬損失又は前記通信品質を測定してもよい。
前記通信中継装置において、当該通信中継装置の周辺に他の空中滞在型の通信中継装置が位置するとき、当該通信中継装置と前記他の通信中継装置とが互いに最適配置になるように前記他の通信中継装置と連動して移動してもよい。
前記通信中継装置において、当該通信中継装置の周辺に、管理運用主体が異なる他の空中滞在型の通信中継装置が位置するとき、前記他の通信中継装置に移動先を指示してもよい。
前記ゲートウェイ局において、フィーダリンク用のアンテナの機械的な駆動又は前記フィーダリンクにおける信号処理により前記通信中継装置の方向を向くように前記フィーダリンク通信部の指向性ビームを制御してもよい。
前記ゲートウェイ局において、当該ゲートウェイ局と前記フィーダリンクの無線通信を行っている接続中の前記通信中継装置は複数であり、前記複数の接続中の通信中継装置にとって最適な位置に移動してもよい。
前記ゲートウェイ局において、当該ゲートウェイ局と前記フィーダリンクの無線通信を行っている接続中の前記通信中継装置の周辺に、前記接続中の通信中継装置とは運用管理主体が異なる他の空中滞在型の通信中継装置が位置するとき、前記接続中の通信中継装置及び前記他の通信中継装置の両方にとって最適な位置に移動してもよい。
前記ゲートウェイ局において、前記フィーダリンクの無線伝搬路における局所的な伝搬損失増大部の発生に影響する気象情報を取得し、前記気象情報に基づいて、前記フィーダリンクの無線伝搬路における前記通信品質の低下を抑制又は回避できる位置に移動してもよい。
前記ゲートウェイ局において、前記フィーダリンクの無線伝搬路における局所的な伝搬損失増大部の発生に影響する気象の時間的変動又は空間的変動を検知又は予測し、前記気象の時間的変動又は空間的変動の検知結果又は予測結果に基づいて、前記フィーダリンクの無線伝搬路における前記通信品質の低下を抑制又は回避できる位置に移動してもよい。
前記ゲートウェイ局において、前記ゲートウェイ局と前記通信中継装置との間のフィーダリンクの無線伝搬路における伝搬損失又は無線信号減衰量を測定し、前記測定の結果に基づいて、前記フィーダリンクの無線伝搬路における前記通信品質の低下を抑制又は回避できる位置に移動してもよい。
前記ゲートウェイ局において、当該ゲートウェイ局が移動した先で前記フィーダリンクの無線信号の減衰量若しくは伝搬損失又は前記通信品質を測定してもよい。
前記通信システムにおいて、前記通信中継装置及び前記ゲートウェイ局の少なくとも一方は複数であり、複数のフィーダリンクの無線伝搬路における前記伝搬損失増大部による通信品質の低下を同時に抑制又は回避してもよい。 前記通信システムにおいて、前記フィーダリンクの無線伝搬路における前記伝搬損失増大部による通信品質の低下を抑制又は回避できる位置まで移動させるための制御情報を前記通信中継装置及び前記ゲートウェイ局の少なくとも一方に送信する遠隔制御装置を、更に備えてもよい。
図1(a)~(c)は、本発明の一実施形態に係る通信システムにおけるHAPS10のフィーダリンクFLの伝搬損失増大部30に対する回避動作の一例を示す説明図である。
図1(a)に示すように、本実施形態の通信システムは、空中浮揚型の通信中継装置(無線中継装置)としての高高度プラットフォーム局(HAPS)(「高高度疑似衛星」、「成層圏プラットフォーム」ともいう。)10を備えている。HAPS10は、所定高度の空域に位置して、所定高度のセル形成目標空域に3次元セル(3次元エリア)を形成する。HAPS10は、自律制御又は外部から制御により地面又は海面から100[km]以下の高高度の空域(浮揚空域)に浮遊あるいは飛行して位置するように制御される浮揚体としてのソーラプレーンに中継通信局が搭載されたものである。HAPS10は、飛行船などの他の浮揚体に中継通信局が搭載されたものであってもよい。
図6のHAPS10は、ソーラープレーンタイプのHAPSであり、長手方向の両端部側が上方に沿った主翼部101と、主翼部101の短手方向の一端縁部にバス動力系の推進装置としての複数のモータ駆動のプロペラ103とを備える。主翼部101の上面には、太陽光発電機能を有する太陽光発電部としての太陽光発電パネル(以下「ソーラーパネル」という。)102が設けられている。また、主翼部101の下面の長手方向の2箇所には、板状の連結部104を介して、ミッション機器が収容される複数の機器収容部としてのポッド105が連結されている。各ポッド105の内部には、ミッション機器としての中継通信局11と、バッテリー106とが収容されている。また、各ポッド105の下面側には離発着時に使用される車輪107が設けられている。ソーラーパネル102で発電された電力はバッテリー106に蓄電され、バッテリー106から供給される電力により、プロペラ103のモータが回転駆動され、中継通信局11による無線中継処理が実行される。
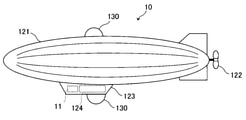
図7のHAPS10は、無人飛行船タイプのHAPSであり、ペイロードが大きいため大容量のバッテリーを搭載することができる。HAPS10は、浮力で浮揚するためのヘリウムガス等の気体が充填された飛行船本体111と、バス動力系の推進装置としてのモータ駆動のプロペラ112と、ミッション機器が収容される機器収容部113とを備える。機器収容部113の内部には、中継通信局11とバッテリー114とが収容されている。バッテリー114から供給される電力により、プロペラ112のモータが回転駆動され、中継通信局11による無線中継処理が実行される。
図11は、実施形態に係るHAPS10における動的サイトダイバーシチ制御の一例を示すフローチャートである。図12は、図11の動的サイトダイバーシチ制御におけるフィーダリンクの伝搬損失の時間的変動の一例を示すグラフである。なお、図11及び図12の例では、HAPS10の移動をHAPS10自体が自律的に制御しているが、中央制御サーバ85からHAPS10の移動を遠隔的に制御してもよい。
図16は、実施形態に係る通信システムのGW局70及びその周辺のネットワーク構成の一例を示す説明図である。図16は、移動可能なコンテナタイプの単一のGW局70を備えた通信システムの例である。図16のGW局70(GW局装置71及びGWアンテナ72)は移動前の状態を示し、GW局70’(GW局装置71’及びGWアンテナ72’)は移動後の状態を示している。
また、本実施形態によれば、HAPS10の上記所定の目標位置への移動を、サービスリンクのセル100Cの地上又は海上におけるフットプリント100Fの位置及び形状を維持可能な範囲内で行っている。又は、上記所定の目標位置へのHAPS10の移動後又は移動中に、サービスリンクのセル100Cのフットプリント100Fの位置及び形状をHAPS10の移動前のフットプリントの位置及び形状に維持するようにサービスリンクの指向性ビームを制御している。従って、HAPS10を上記所定の目標位置へ移動させたときにサービスリンクのセル100C及びそのフットプリント100Fの位置及び形状を維持することができる。
11 中継通信局
12,12(1),12(2) フィーダリンク用アンテナ(FLアンテナ)
30 伝搬損失増大部
60 端末装置
70,70(1),70(2) ゲートウェイ局(GW局)
70’ 移動後のゲートウェイ局(GW局)
71 GW局装置
72 フィーダリンク用アンテナ(GWアンテナ)
100C 3次元セル
100F フットプリント
Claims (22)
- 空中滞在型の通信中継装置であって、
ゲートウェイ局との間でフィーダリンクの無線通信を行うフィーダリンク通信部と、
端末装置との間でサービスリンクの無線通信するサービスリンク通信部と、
当該通信中継装置を移動させる駆動部と、
前記ゲートウェイ局と当該通信中継装置との間のフィーダリンクの無線伝搬路に局所的な伝搬損失増大部が発生したとき又は前記伝搬損失増大部の発生が予測されるとき、前記フィーダリンクの無線伝搬路における前記伝搬損失増大部による通信品質の低下を抑制又は回避できる位置まで当該通信中継装置を移動させるように制御する駆動制御部と、
を備え、
前記サービスリンクのセルの地上又は海上におけるフットプリントの位置及び形状を維持可能な範囲内で移動する、ことを特徴とする通信中継装置。 - 請求項1の通信中継装置において、
フィーダリンク用のアンテナの機械的な駆動又は前記フィーダリンクにおける信号処理により前記ゲートウェイ局の方向を向くように前記フィーダリンク通信部の指向性ビームを制御することを特徴とする通信中継装置。 - 請求項1又は2の通信中継装置において、
当該通信中継装置を移動させた後又は当該通信中継装置の移動中に、前記サービスリンクのセルの地上又は海上におけるフットプリントの位置及び形状を当該通信中継装置の移動前の前記フットプリントの位置及び形状に維持するように前記サービスリンク通信部の指向性ビームを制御することを特徴とする通信中継装置。 - 請求項1乃至3のいずれかの通信中継装置において、
前記フィーダリンクの無線伝搬路における局所的な伝搬損失増大部の発生に影響する気象情報を取得し、前記気象情報に基づいて、前記フィーダリンクの無線伝搬路における前記通信品質の低下を抑制又は回避できる位置に移動することを特徴とする通信中継装置。 - 請求項1乃至4のいずれかの通信中継装置において、
前記フィーダリンクの無線伝搬路における局所的な伝搬損失増大部の発生に影響する気象の時間的変動又は空間的変動を検知又は予測し、前記気象の時間的変動又は空間的変動の検知結果又は予測結果に基づいて、前記フィーダリンクの無線伝搬路における前記通信品質の低下を抑制又は回避できる位置に移動することを特徴とする通信中継装置。 - 請求項5の通信中継装置において、
前記ゲートウェイ局との間のフィーダリンクと、前記ゲートウェイ局とは異なる場所に位置するように地上又は海上に設けた無線装置との間のリンクとを含む、複数リンクの無線伝搬路における伝搬損失又は無線信号減衰量を測定し、前記測定の結果に基づいて、前記気象の空間的変動を検知又は予測することを特徴とする通信中継装置。 - 請求項1乃至6のいずれかの通信中継装置において、
前記ゲートウェイ局と前記通信中継装置との間のフィーダリンクの無線伝搬路における伝搬損失又は無線信号減衰量を測定し、前記測定の結果に基づいて、前記フィーダリンクの無線伝搬路における前記通信品質の低下を抑制又は回避できる位置に移動することを特徴とする通信中継装置。 - 請求項1乃至7のいずれかの通信中継装置において、
当該通信中継装置が移動した先で前記フィーダリンクの無線信号の減衰量若しくは伝搬損失又は前記通信品質を測定することを特徴とする通信中継装置。 - 請求項1乃至8のいずれかの通信中継装置において、
当該通信中継装置の周辺に他の空中滞在型の通信中継装置が位置するとき、当該通信中継装置と前記他の通信中継装置とが互いに最適配置になるように前記他の通信中継装置と連動して移動することを特徴とする通信中継装置。 - 請求項1乃至9のいずれかの通信中継装置において、
当該通信中継装置の周辺に、管理運用主体が異なる他の空中滞在型の通信中継装置が位置するとき、前記他の通信中継装置に移動先を指示することを特徴とする通信中継装置。 - 空中滞在型の通信中継装置と無線通信を行うゲートウェイ局であって、
通信網との間で通信を行うネットワーク通信部と、
前記通信中継装置との間でフィーダリンクの無線通信を行うフィーダリンク通信部と、
当該ゲートウェイ局を移動させる駆動部と、
当該ゲートウェイ局と前記通信中継装置との間のフィーダリンクの無線伝搬路に局所的な伝搬損失増大部が発生したとき又は前記伝搬損失増大部の発生が予測されるとき、前記フィーダリンクの無線伝搬路における前記伝搬損失増大部による通信品質の低下を抑制又は回避できる位置まで当該ゲートウェイ局を移動させるように制御する駆動制御部と、
を備えることを特徴とするゲートウェイ局。 - 請求項11のゲートウェイ局において、
フィーダリンク用のアンテナの機械的な駆動又は前記フィーダリンクにおける信号処理により前記通信中継装置の方向を向くように前記フィーダリンク通信部の指向性ビームを制御することを特徴とするゲートウェイ局。 - 請求項11又は12のゲートウェイ局において、
当該ゲートウェイ局と前記フィーダリンクの無線通信を行っている接続中の前記通信中継装置は複数であり、
前記複数の接続中の通信中継装置にとって最適な位置に移動することを特徴とするゲートウェイ局。 - 請求項11乃至13のいずれかのゲートウェイ局において、
当該ゲートウェイ局と前記フィーダリンクの無線通信を行っている接続中の前記通信中継装置の周辺に、前記接続中の通信中継装置とは運用管理主体が異なる他の空中滞在型の通信中継装置が位置するとき、前記接続中の通信中継装置及び前記他の通信中継装置の両方にとって最適な位置に移動することを特徴とするゲートウェイ局。 - 請求項11乃至14のいずれかのゲートウェイ局において、
前記フィーダリンクの無線伝搬路における局所的な伝搬損失増大部の発生に影響する気象情報を取得し、前記気象情報に基づいて、前記フィーダリンクの無線伝搬路における前記通信品質の低下を抑制又は回避できる位置に移動することを特徴とするゲートウェイ局。 - 請求項11乃至15のいずれかのゲートウェイ局において、
前記フィーダリンクの無線伝搬路における局所的な伝搬損失増大部の発生に影響する気象の時間的変動又は空間的変動を検知又は予測し、前記気象の時間的変動又は空間的変動の検知結果又は予測結果に基づいて、前記フィーダリンクの無線伝搬路における前記通信品質の低下を抑制又は回避できる位置に移動することを特徴とするゲートウェイ局。 - 請求項11乃至16のいずれかのゲートウェイ局において、
前記ゲートウェイ局と前記通信中継装置との間のフィーダリンクの無線伝搬路における伝搬損失又は無線信号減衰量を測定し、前記測定の結果に基づいて、前記フィーダリンクの無線伝搬路における前記通信品質の低下を抑制又は回避できる位置に移動することを特徴とするゲートウェイ局。 - 請求項11乃至17のいずれかのゲートウェイ局において、
当該ゲートウェイ局が移動した先で前記フィーダリンクの無線信号の減衰量若しくは伝搬損失又は前記通信品質を測定することを特徴とするゲートウェイ局。 - 請求項1乃至10のいずれかの通信中継装置と請求項11乃至18のいずれかのゲートウェイ局とを備え、前記フィーダリンクの無線伝搬路における前記伝搬損失増大部による通信品質の低下を抑制又は回避できる位置まで前記通信中継装置及び前記ゲートウェイ局の少なくとも一方を移動させることを特徴とする通信システム。
- 請求項19の通信システムにおいて、
前記通信中継装置及び前記ゲートウェイ局の少なくとも一方は複数であり、複数のフィーダリンクの無線伝搬路における前記伝搬損失増大部による通信品質の低下を同時に抑制又は回避することを特徴とする通信システム。 - 請求項19又は20の通信システムにおいて、
前記フィーダリンクの無線伝搬路における前記伝搬損失増大部による通信品質の低下を抑制又は回避できる位置まで移動させるための制御情報を前記通信中継装置及び前記ゲートウェイ局の少なくとも一方に送信する遠隔制御装置を、更に備えることを特徴とする通信システム。 - 空中滞在型の通信中継装置と無線通信を行うゲートウェイ局に設けられたコンピュータ又はプロセッサで実行されるプログラムであって、
通信網との間で通信を行うためのプログラムコードと、
前記通信中継装置との間でフィーダリンクの無線通信を行うためのプログラムコードと、
前記ゲートウェイ局と前記通信中継装置との間のフィーダリンクの無線伝搬路に局所的な伝搬損失増大部が発生したとき又は前記伝搬損失増大部の発生が予測されるとき、前記フィーダリンクの無線伝搬路における前記伝搬損失増大部による通信品質の低下を抑制又は回避できる位置まで前記ゲートウェイ局を移動させるためのプログラムコードと、
を含むことを特徴とするプログラム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019135682A JP7010901B2 (ja) | 2019-07-23 | 2019-07-23 | Haps通信システムにおける動的サイトダイバーシチ |
| PCT/JP2020/012058 WO2021014684A1 (ja) | 2019-07-23 | 2020-03-18 | Haps通信システムにおける動的サイトダイバーシチ |
| US17/623,419 US11522601B2 (en) | 2019-07-23 | 2020-03-18 | Dynamic site diversity in HAPS communication system |
| EP20843128.8A EP4007339B1 (en) | 2019-07-23 | 2020-03-18 | Dynamic site diversity in haps communication system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019135682A JP7010901B2 (ja) | 2019-07-23 | 2019-07-23 | Haps通信システムにおける動的サイトダイバーシチ |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2021019335A JP2021019335A (ja) | 2021-02-15 |
| JP2021019335A5 JP2021019335A5 (ja) | 2021-11-25 |
| JP7010901B2 true JP7010901B2 (ja) | 2022-01-26 |
Family
ID=74194065
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019135682A Active JP7010901B2 (ja) | 2019-07-23 | 2019-07-23 | Haps通信システムにおける動的サイトダイバーシチ |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11522601B2 (ja) |
| EP (1) | EP4007339B1 (ja) |
| JP (1) | JP7010901B2 (ja) |
| WO (1) | WO2021014684A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7408038B2 (ja) * | 2021-02-17 | 2024-01-05 | ソフトバンク株式会社 | Hapsの移動及び旋回を考慮した特定チャネルに限定したフットプリント固定制御 |
| JP7144583B1 (ja) | 2021-09-29 | 2022-09-29 | ソフトバンク株式会社 | 制御装置、プログラム、システム、及び制御方法 |
| US11632724B1 (en) * | 2021-10-05 | 2023-04-18 | L3Harris Technologies, Inc. | Proactive power and rate control algorithm for dynamic platforms in a mesh network |
| JP7129538B1 (ja) | 2021-12-13 | 2022-09-01 | ソフトバンク株式会社 | 情報処理装置、プログラム、情報処理システム、及び情報処理方法 |
| WO2023218556A1 (ja) * | 2022-05-11 | 2023-11-16 | 日本電信電話株式会社 | 無線通信方法及び無線通信システム |
| WO2024013803A1 (ja) * | 2022-07-11 | 2024-01-18 | 日本電信電話株式会社 | 無線通信システム、無線中継局監視制御装置、および無線通信方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017195493A (ja) | 2016-04-20 | 2017-10-26 | 日本電気株式会社 | 移動通信システム |
| US20180152870A1 (en) | 2016-11-30 | 2018-05-31 | Electronics And Telecommunications Research Institute | Method and apparatus for applying millimeter wave-based mobile communication technology to unmanned aerial vehicle, operation method of unmanned aerial vehicle using the same, and communication method using the same |
| JP6521123B1 (ja) | 2018-02-28 | 2019-05-29 | 日本電気株式会社 | 通信制御システム、通信制御方法、及びプログラム |
| JP2019121909A (ja) | 2018-01-04 | 2019-07-22 | ソフトバンク株式会社 | Hapsのフィーダリンクにおけるサイトダイバーシチ適用時のサイト間伝送・伝搬遅延補正 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58107617A (ja) * | 1981-12-21 | 1983-06-27 | 京セラ株式会社 | チツプコンデンサ |
| US10244362B2 (en) * | 2013-10-08 | 2019-03-26 | Gozio Inc. | Use of RF-based fingerprinting for indoor positioning by mobile technology platforms |
| US9302782B2 (en) | 2014-08-18 | 2016-04-05 | Sunlight Photonics Inc. | Methods and apparatus for a distributed airborne wireless communications fleet |
| US10515416B2 (en) | 2014-09-03 | 2019-12-24 | Infatics, Inc. | System and methods for hosting missions with unmanned aerial vehicles |
| WO2016069598A1 (en) * | 2014-10-27 | 2016-05-06 | Sikorsky Aircraft Corporation | Communication link accessibility aware navigation |
| CN108349589B (zh) * | 2015-07-27 | 2021-03-09 | 珍吉斯科姆控股有限责任公司 | 协作mimo系统中的机载中继 |
| US9692498B2 (en) * | 2015-10-16 | 2017-06-27 | At&T Intellectual Property I, L.P. | Extending wireless signal coverage with drones |
| US10643406B2 (en) * | 2016-04-20 | 2020-05-05 | Gopro, Inc. | Data logging in aerial platform |
-
2019
- 2019-07-23 JP JP2019135682A patent/JP7010901B2/ja active Active
-
2020
- 2020-03-18 EP EP20843128.8A patent/EP4007339B1/en active Active
- 2020-03-18 WO PCT/JP2020/012058 patent/WO2021014684A1/ja unknown
- 2020-03-18 US US17/623,419 patent/US11522601B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017195493A (ja) | 2016-04-20 | 2017-10-26 | 日本電気株式会社 | 移動通信システム |
| US20180152870A1 (en) | 2016-11-30 | 2018-05-31 | Electronics And Telecommunications Research Institute | Method and apparatus for applying millimeter wave-based mobile communication technology to unmanned aerial vehicle, operation method of unmanned aerial vehicle using the same, and communication method using the same |
| JP2019121909A (ja) | 2018-01-04 | 2019-07-22 | ソフトバンク株式会社 | Hapsのフィーダリンクにおけるサイトダイバーシチ適用時のサイト間伝送・伝搬遅延補正 |
| JP6521123B1 (ja) | 2018-02-28 | 2019-05-29 | 日本電気株式会社 | 通信制御システム、通信制御方法、及びプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2021014684A1 (ja) | 2021-01-28 |
| EP4007339B1 (en) | 2023-08-09 |
| JP2021019335A (ja) | 2021-02-15 |
| EP4007339A1 (en) | 2022-06-01 |
| EP4007339C0 (en) | 2023-08-09 |
| US11522601B2 (en) | 2022-12-06 |
| EP4007339A4 (en) | 2022-09-21 |
| US20220209848A1 (en) | 2022-06-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7010901B2 (ja) | Haps通信システムにおける動的サイトダイバーシチ | |
| KR102121164B1 (ko) | 제5세대 통신의 3차원화 네트워크를 구축하는 haps간 통신 및 대용량 다셀 haps | |
| KR102233552B1 (ko) | 무선 중계 장치 및 통신 시스템 | |
| KR20200110414A (ko) | Haps 협조 비행 시스템 | |
| WO2020202817A1 (ja) | Haps通信システムにおけるマルチフィーダリンク構成及びその制御 | |
| KR102221972B1 (ko) | Haps의 피더 링크에 있어서의 사이트 다이버시티 적용시의 사이트간 전송·전반 지연 보정 | |
| WO2021002044A1 (ja) | Haps通信システムのフィーダリンクにおけるフォワードリンク通信の干渉検知及び干渉抑制 | |
| JP2020010219A (ja) | Hapsを用いた単一周波数ネットワークセル構成 | |
| WO2020195270A1 (ja) | Haps通信システムにおけるマルチフィーダリンク間の干渉検知 | |
| WO2021002045A1 (ja) | Haps通信システムのフィーダリンクにおけるリバースリンク通信の干渉検知及び干渉抑制 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211013 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211013 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20211013 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220107 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220113 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7010901 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |