JP6989454B2 - ハーフレンズおよび平面ミラーを備えたクローキングデバイスおよびこれを含むビークル - Google Patents
ハーフレンズおよび平面ミラーを備えたクローキングデバイスおよびこれを含むビークル Download PDFInfo
- Publication number
- JP6989454B2 JP6989454B2 JP2018134887A JP2018134887A JP6989454B2 JP 6989454 B2 JP6989454 B2 JP 6989454B2 JP 2018134887 A JP2018134887 A JP 2018134887A JP 2018134887 A JP2018134887 A JP 2018134887A JP 6989454 B2 JP6989454 B2 JP 6989454B2
- Authority
- JP
- Japan
- Prior art keywords
- half lens
- side half
- image side
- object side
- lens
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B17/00—Systems with reflecting surfaces, with or without refracting elements
- G02B17/08—Catadioptric systems
- G02B17/0864—Catadioptric systems having non-imaging properties
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B17/00—Systems with reflecting surfaces, with or without refracting elements
- G02B17/02—Catoptric systems, e.g. image erecting and reversing system
- G02B17/023—Catoptric systems, e.g. image erecting and reversing system for extending or folding an optical path, e.g. delay lines
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B3/00—Simple or compound lenses
- G02B3/0006—Arrays
- G02B3/0037—Arrays characterized by the distribution or form of lenses
- G02B3/0056—Arrays characterized by the distribution or form of lenses arranged along two different directions in a plane, e.g. honeycomb arrangement of lenses
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D25/00—Superstructure or monocoque structure sub-units; Parts or details thereof not otherwise provided for
- B62D25/04—Door pillars ; windshield pillars
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B3/00—Simple or compound lenses
- G02B3/0006—Arrays
- G02B3/0037—Arrays characterized by the distribution or form of lenses
- G02B3/0043—Inhomogeneous or irregular arrays, e.g. varying shape, size, height
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B3/00—Simple or compound lenses
- G02B2003/0093—Simple or compound lenses characterised by the shape
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Lenses (AREA)
- Optical Elements Other Than Lenses (AREA)
Description
本明細書は、概して、物体が透明に見えるようにするための装置および方法に関し、より具体的には、ビークル(自動車、乗り物、輸送体)のピラー用のクローキングデバイスおよびビークルのピラーを透明に見えるようにするための方法に関する。
ビークルのピラーを透明にすると考えられるクローキングデバイスについての研究が公表されている。このような研究は、ビークルの乗員が見掛け上、ビークルピラーを通して「見る」ことができるようにし、これによってビークル内の死角を減少させるためにメタマテリアルを使用すること、または表示スクリーンと組み合わせてビデオカメラを使用することを開示している。しかしながら、メタマテリアルおよびビデオ技術は、複雑な材料設計および設備を使用する。
一実施形態において、クローキングデバイスは、物体サイド、画像サイド、物体サイドと画像サイドの間の被クローキング領域(または、クローキングされた領域)、および物体サイドから画像サイドまで延在する基準光学軸を含む。物体サイドハーフレンズと画像サイドハーフレンズが含まれている。この物体サイドハーフレンズおよび画像サイドハーフレンズは、各々が内向き表面、外向き凸状表面、厚端部および薄端部を含んでいる。内向き表面および外向き凸状表面は厚端部と薄端部の間に延在している。物体サイドハーフレンズと画像サイドハーフレンズの間に位置付けされた平面反射境界が含まれている。平面反射境界は、基準光学軸と平行に配向された内向きミラー表面を含む。クローキングデバイスの物体サイドに位置付けされ被クローキング領域により視認不能化された物体からの光は、物体サイドハーフレンズ、平面反射境界および画像サイドハーフレンズにより被クローキング領域の周りに方向変換されてクローキングデバイスの画像サイドに物体の画像を形成し、こうして物体からの光が被クローキング領域を通過したようにみえる。一実施形態において、物体サイドおよび画像サイドハーフレンズの薄端部は、基準光学軸に対して近位に位置付けされ、物体サイドおよび画像サイドハーフレンズの厚端部は、基準光学軸に対して遠位に位置付けされている。同様に、平面反射境界の内向きミラー表面は、物体サイドハーフレンズの焦点に位置付けされていてよい。物体サイドハーフレンズは、クローキングデバイスの物体サイドに位置付けされた物体からの光を平面反射境界の内向きミラー表面上に集束させるように配向されており、平面反射境界の内向きミラー表面は、物体サイドハーフレンズから画像サイドハーフレンズまで光を反射するように配向されている。画像サイドハーフレンズは、平面反射境界の内向きミラー表面からの光を集束させて、クローキングデバイスの画像サイドに物体の画像を形成するように配向されている。
本開示中に記載の1つ以上(1又は複数)の実施形態によると、クローキングデバイスは概して、一対のハーフレンズおよび平面ミラーを含み、これらが入射光を被クローキング領域の周りに導く。本開示中に記載のクローキングデバイスは、物体からの光を集束させ、反射させ、発散させ、再度集束させるために、平面ミラーと組み合わせた形で、ハーフ円柱レンズ、ハーフ非円柱レンズおよび/またはハーフ色消しレンズを利用することができる。本開示中に記載のクローキングデバイスは、ビークルAピラー、Bピラー、Cピラー、Dピラーなどのビークル部材をクローキングし、ビークル部材によりひき起こされる「死角」を除去するために使用可能である。死角とは、乗員の視界が妨害され得るビークルの領域を意味する。クローキングデバイスがなければビークルのピラーによって妨害されると思われる画像を、ハーフレンズおよび平面ミラーを使用することにより、ドライバは知覚することができる。本開示では、クローキングデバイスのさまざまな実施形態およびその使用方法が、添付図面を具体的に参照しながら、さらに詳細に説明される。
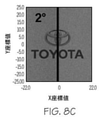
ここで図8A〜8Fを参照すると、クローキングアセンブリ10の物体サイド12に位置付けされたエンブレムの形をした物体の、市販ソフトウェアプログラム(Zemax OpticStudio)を用いてシミュレートされた画像サイド14から見た画像が描かれている。物体サイドハーフレンズ100、140および画像サイドハーフレンズ120、160は、Thorlabs製の市販のAYL5040−Aのハーフレンズであった。物体サイドハーフレンズ100、140および画像サイドハーフレンズ120、160は、40mmの焦点距離、50mmの高さhおよび50mmの長さlを有していた。外向き凸状表面104、124、144、164は、反射防止コーティングが施されていた。全デバイス部域と隠ぺい領域の縦横比は、それぞれ0.60および0.83であり、クローキング比(すなわち隠ぺい領域/総デバイス部域)は約36%であった。図8Aは、基準光学軸15と+Y方向からのクローキングアセンブリ10の視角の間の不整合が全く無い状態(0°)の物体の画像を描く。すなわち、本開示で使用されている「不整合」なる用語は、クローキングアセンブリの基準光学軸と、図中で+Y方向により描かれている画像サイドからクローキングアセンブリを見る観察者の視線とで画定される角度(本開示中では「視角」とも呼ばれる)を意味する。図8Bは、基準光学軸15とクローキングアセンブリ10の視角の間に1°の不整合を有する物体の画像を描く。図8Cは、基準光学軸15とクローキングアセンブリ10の視角の間に2°の不整合を有する物体の画像を描く。図8Dは、基準光学軸15とクローキングアセンブリ10の視角の間に3°の不整合を有する物体の画像を描く。図8Eは、基準光学軸15とクローキングアセンブリ10の視角の間に4°の不整合を有する物体の画像を描く。図8Fは、基準光学軸15とクローキングアセンブリ10の視角の間に5°の不整合を有する物体の画像を描く。図8A〜8F中の画像により示されるように、クローキングアセンブリ10の物体サイド12の物体の画像は、最大5°の不整合で明確に見ることができる。
クローキングデバイスであって、
物体サイド、画像サイド、前記物体サイドと前記画像サイドの間の被クローキング領域、および前記物体サイドから前記画像サイドまで延在する基準光学軸と、
物体サイドハーフレンズおよび画像サイドハーフレンズであって、各々が内向き表面、外向き凸状表面、厚端部および薄端部を含み、前記内向き表面および前記外向き凸状表面が前記厚端部と前記薄端部の間に延在している、物体サイドハーフレンズおよび画像サイドハーフレンズと、
前記物体サイドハーフレンズと前記画像サイドハーフレンズの間に位置付けされた平面反射境界であって、前記基準光学軸と平行に配向された内向きミラー表面を含む、平面反射境界と、
を含み、
前記クローキングデバイスの前記物体サイドに位置付けされ前記被クローキング領域により視認不能化された物体からの光が、前記物体サイドハーフレンズ、前記平面反射境界および前記画像サイドハーフレンズにより前記被クローキング領域の周りに方向変換されて前記クローキングデバイスの前記画像サイドに前記物体の画像を形成し、こうして前記物体からの前記光が前記被クローキング領域を通過したようにみえる、
クローキングデバイス。
[例2]
前記物体サイドハーフレンズおよび前記画像サイドハーフレンズの前記薄端部が、前記基準光学軸に対して近位に位置付けされ、前記物体サイドハーフレンズおよび前記画像サイドハーフレンズの前記厚端部が、前記基準光学軸に対して遠位に位置付けされている、例1に記載のクローキングデバイス。
[例3]
前記平面反射境界の前記内向きミラー表面が、前記物体サイドハーフレンズの焦点に位置付けされている、例1に記載のクローキングデバイス。
[例4]
前記物体サイドハーフレンズは、前記クローキングデバイスの前記物体サイドに位置付けされた前記物体からの光を前記平面反射境界の前記内向きミラー表面上に集束させるように配向されており、前記平面反射境界の前記内向きミラー表面は、前記物体サイドハーフレンズからの光を前記画像サイドハーフレンズに反射するように配向されており、前記平面反射境界の前記内向きミラー表面から反射された光は発散光であり、前記画像サイドハーフレンズは、前記平面反射境界の前記内向きミラー表面からの前記発散光を集束させて前記クローキングデバイスの前記画像サイドに前記物体の前記画像を形成するように配向されている、例1に記載のクローキングデバイス。
[例5]
前記物体サイドハーフレンズおよび前記画像サイドハーフレンズが、円柱ハーフレンズ、非円柱ハーフレンズおよび色消しハーフレンズからなる群の中から選択される、例1に記載のクローキングデバイス。
[例6]
前記物体サイドハーフレンズは物体サイドハーフレンズ対を含み、前記物体サイドハーフレンズ対の一方の物体サイドハーフレンズは前記基準光学軸の一方の側に位置付けされ、前記物体サイドハーフレンズ対の他方の物体サイドハーフレンズが前記基準光学軸の他方の側に位置付けされており、
前記物体サイドハーフレンズ対の各物体サイドハーフレンズは、内向き表面、外向き凸状表面、厚端部および薄端部サイドを含み、前記内向き表面および前記外向き凸状表面は前記厚端部と前記薄端部の間に延在しており、
前記物体サイドハーフレンズ対の各物体サイドハーフレンズの前記薄端部は、前記基準光学軸に対し近位に位置付けされ、前記物体サイドハーフレンズ対の各物体サイドハーフレンズの前記厚端部は、前記基準光学軸に対し遠位に位置付けされており、
前記画像サイドハーフレンズは画像サイドハーフレンズ対を含み、前記画像サイドハーフレンズ対の一方の画像サイドハーフレンズは前記基準光学軸の一方の側に位置付けされ、前記画像サイドハーフレンズの他方の画像サイドハーフレンズは前記基準光学軸の他方の側に位置付けされており、
前記画像サイドハーフレンズ対の各画像サイドハーフレンズは、内向き表面、外向き凸状表面、厚端部および薄端部を含み、前記内向き表面および前記外向き凸状表面は前記厚端部と前記薄端部の間に延在しており、
前記画像サイドハーフレンズ対の各画像サイドハーフレンズの前記薄端部は、前記基準光学軸に対し近位に位置付けされ、前記画像サイドハーフレンズ対の各画像サイドハーフレンズの前記厚端部は、前記基準光学軸に対し遠位に位置付けされており、
前記平面反射境界は、平面反射境界対を含み、前記平面反射境界対の一方の平面反射境界は、前記基準光学軸の一方の側に位置付けされた前記物体サイドハーフレンズと前記画像サイドハーフレンズの間に位置付けされており、前記平面反射境界対の他方の平面反射境界は、前記基準光学軸の前記他方の側に位置付けされた前記物体サイドハーフレンズと前記画像サイドハーフレンズの間に位置付けされており、
前記平面反射境界対の各平面反射境界は、前記基準光学軸と平行に配向された内向きミラー表面を含み、
前記クローキングデバイスの前記物体サイドに位置付けされ前記被クローキング領域により視認不能化された物体からの前記光が、前記物体サイドハーフレンズ対、平面反射境界対および画像サイドハーフレンズ対により前記被クローキング領域の周りに方向変換されて前記クローキングデバイスの画像サイドに前記物体の画像を形成し、こうして前記物体からの前記光が前記被クローキング領域を通過したようにみえる、
例1に記載のクローキングデバイス。
[例7]
前記物体サイドハーフレンズ対の前記厚端部の厚さが互いに等しい、例6に記載のクローキングデバイス。
[例8]
前記物体サイドハーフレンズ対の前記厚端部の厚さが互いに等しくない、例6に記載のクローキングデバイス。
[例9]
クローキングデバイスアセンブリであって、
物体サイド、画像サイド、被クローキング領域、前記被クローキング領域内部に位置付けされた被クローキング部材、および前記物体サイドから前記画像サイドまで延在する基準光学軸と、
物体サイドハーフレンズ対であって、各物体サイドハーフレンズが内向き表面および外向き凸状表面を含み、前記物体サイドハーフレンズ対の一方の物体サイドハーフレンズが前記基準光学軸の一方の側に位置付けされ、前記物体サイドハーフレンズ対の他方の物体サイドハーフレンズが前記基準光学軸の他方の側に位置付けされている、物体サイドハーフレンズ対と、
サイドハーフレンズ対であって、各画像サイドハーフレンズが内向き表面および外向き凸状表面を含み、前記画像サイドハーフレンズ対の一方の画像サイドハーフレンズが前記基準光学軸の一方の側に位置付けされ、前記画像サイドハーフレンズ対の他方の画像サイドハーフレンズが前記基準光学軸の他方の側に位置付けされている、画像サイドハーフレンズ対と、
平面反射境界対であって、各平面反射境界が前記基準光学軸に対して平行に配向された内向きミラー表面を含み、前記平面反射境界対の一方の平面反射境界が、前記基準光学軸の前記一方の側に位置付けされた前記物体サイドハーフレンズと前記画像サイドハーフレンズの間に位置付けされ、前記平面反射境界対の他方の平面反射境界が、前記基準光学軸の前記他方の側に位置付けされた前記物体サイドハーフレンズと前記画像サイドハーフレンズの間に位置付けされている、平面反射境界対と、
を含み、
前記物体サイドハーフレンズ対および前記画像サイドハーフレンズ対が、円柱ハーフレンズ、非円柱ハーフレンズおよび色消しハーフレンズからなる群の中から選択されており、
前記クローキングデバイスアセンブリの前記物体サイドに位置付けされ前記被クローキング領域により視認不能化された物体からの光が、前記物体サイドハーフレンズ対、前記平面反射境界対および前記画像サイドハーフレンズ対により前記被クローキング部材の周りに方向変換されて前記クローキングデバイスアセンブリの前記画像サイドに前記物体の画像を形成し、こうして前記物体からの前記光が前記被クローキング領域を通過したようにみえる、
クローキングデバイスアセンブリ。
[例10]
前記物体サイドハーフレンズ対の各物体サイドハーフレンズおよび前記画像サイドハーフレンズ対の各画像サイドハーフレンズが、厚端部および薄端部を含み、前記物体サイドハーフレンズ対の各物体サイドハーフレンズおよび前記画像サイドハーフレンズ対の各画像サイドハーフレンズの内向き表面および外向き凸状表面が前記厚端部と前記薄端部の間に延在する、例9に記載のクローキングデバイス。
[例11]
前記物体サイドハーフレンズ対の各物体サイドハーフレンズおよび前記画像サイドハーフレンズ対の各画像サイドハーフレンズの薄端部が、前記基準光学軸に対し近位に位置付けされ、前記厚端部の各々が、前記基準光学軸に対し遠位に位置付けされている、例10に記載のクローキングデバイスアセンブリ。
[例12]
前記物体サイドハーフレンズ対の各物体サイドハーフレンズの前記厚端部の厚さが互いに等しく、前記画像サイドハーフレンズ対の各画像サイドハーフレンズの前記厚端部の厚さが互いに等しい、例10に記載のクローキングデバイスアセンブリ。
[例13]
前記物体サイドハーフレンズ対の各物体サイドハーフレンズの前記厚端部の厚さが互いに等しくなく、前記画像サイドハーフレンズ対の各画像サイドハーフレンズの前記厚端部の厚さが互いに等しくない、例10に記載のクローキングデバイスアセンブリ。
[例14]
前記平面反射境界対の前記内向きミラー表面の対が、前記画像サイドハーフレンズ対の焦点に位置付けされている、例9に記載のクローキングデバイスアセンブリ。
[例15]
前記クローキングデバイスの前記物体サイドに位置付けされた前記物体からの前記光が、物体−前記物体サイドハーフレンズ対の外向き凸状表面−前記物体サイドハーフレンズ対の内向き表面−前記平面反射境界対の内向きミラー表面−前記画像サイドハーフレンズ対の内向き表面−前記画像サイドハーフレンズ対の外向き凸状表面−画像という光路を介し、前記画像サイドまで伝播して前記画像を形成する、例9に記載のクローキングデバイスアセンブリ。
[例16]
ビークルであって、
Aピラーと、
前記Aピラー上に位置付けされたクローキングデバイスであって、
前記クローキングデバイスが、物体サイド、画像サイド、被クローキング領域、および前記物体サイドから前記画像サイドまで延在する基準光学軸を含み、前記Aピラーが前記被クローキング領域内に位置付けされ、前記物体サイドが前記ビークルの外部に位置付けされ、前記画像サイドが前記ビークルの内部に位置付けされ、
前記クローキングデバイスが更に、物体サイドハーフレンズおよび画像サイドハーフレンズであって、各々が内向き表面、外向き凸状表面、厚端部および薄端部を含み、前記内向き表面および前記外向き凸状表面が前記厚端部と前記薄端部の間に延在している、物体サイドハーフレンズおよび画像サイドハーフレンズを含み、
前記クローキングデバイスが更に、前記物体サイドハーフレンズと前記画像サイドハーフレンズの間に位置付けされた平面反射境界であって、前記基準光学軸と平行に配向された内向きミラー表面を含む、平面反射境界を含む、
クローキングデバイスと、
を含み、
前記クローキングデバイスの物体サイドに位置付けされ前記被クローキング領域により視認不能化された物体からの光が、前記物体サイドハーフレンズを通る前記平面反射境界への前記光の伝播と、前記平面反射境界による前記画像サイドハーフレンズ上への前記物体サイドハーフレンズからの光の反射と、前記平面反射境界からの前記光の前記画像サイドハーフレンズを通る伝播と、を介して、前記Aピラーの周りに方向変換されて前記クローキングデバイスの画像サイドに前記物体の画像を形成し、こうして前記物体からの前記光が前記被クローキング領域を通過したようにみえる、
ビークル。
[例17]
前記物体サイドハーフレンズおよび画像サイドハーフレンズの前記薄端部が、前記基準光学軸に対して近位に位置付けされ、前記物体サイドおよび画像サイドハーフレンズの前記厚端部が、前記基準光学軸に対して遠位に位置付けされている、例16に記載のビークル。
[例18]
前記平面反射境界の前記内向きミラー表面が、前記物体サイドハーフレンズの焦点に位置付けされている、例16に記載のビークル。
[例19]
前記物体サイドハーフレンズの前記厚端部の厚さが、前記画像サイドハーフレンズの前記厚端部の厚さに等しい、例16に記載のビークル。
[例20]
前記物体サイドハーフレンズの前記厚端部の厚さが前記画像サイドハーフレンズの前記厚端部の厚さに等しくない、例16に記載のビークル。
Claims (10)
- クローキングデバイスであって、
物体サイド、画像サイド、前記物体サイドと前記画像サイドの間の被クローキング領域、および前記物体サイドから前記画像サイドまで延在する基準光学軸と、
物体サイドハーフレンズおよび画像サイドハーフレンズであって、各々が内向き表面、外向き凸状表面、厚端部および薄端部を含み、前記内向き表面および前記外向き凸状表面が前記厚端部と前記薄端部の間に延在している、物体サイドハーフレンズおよび画像サイドハーフレンズと、
前記物体サイドハーフレンズと前記画像サイドハーフレンズの間に位置付けされた平面反射境界であって、前記基準光学軸と平行に配向された内向きミラー表面を含む、平面反射境界と、
を含み、
前記クローキングデバイスの前記物体サイドに位置付けされ前記被クローキング領域により視認不能化された物体からの光が、前記物体サイドハーフレンズ、前記平面反射境界および前記画像サイドハーフレンズにより前記被クローキング領域の周りに方向変換されて前記クローキングデバイスの前記画像サイドに前記物体の画像を形成し、こうして前記物体からの前記光が前記被クローキング領域を通過したようにみえる、
クローキングデバイス。 - 前記物体サイドハーフレンズおよび前記画像サイドハーフレンズの前記薄端部が、前記基準光学軸に対して近位に位置付けされ、前記物体サイドハーフレンズおよび前記画像サイドハーフレンズの前記厚端部が、前記基準光学軸に対して遠位に位置付けされている、請求項1に記載のクローキングデバイス。
- 前記平面反射境界の前記内向きミラー表面が、前記物体サイドハーフレンズの焦点に位置付けされている、請求項1または2に記載のクローキングデバイス。
- 前記物体サイドハーフレンズは、前記クローキングデバイスの前記物体サイドに位置付けされた前記物体からの光を前記平面反射境界の前記内向きミラー表面上に集束させるように配向されており、前記平面反射境界の前記内向きミラー表面は、前記物体サイドハーフレンズからの光を前記画像サイドハーフレンズに反射するように配向されており、前記平面反射境界の前記内向きミラー表面から反射された光は発散光であり、前記画像サイドハーフレンズは、前記平面反射境界の前記内向きミラー表面からの前記発散光を集束させて前記クローキングデバイスの前記画像サイドに前記物体の前記画像を形成するように配向されている、請求項1から3のいずれかに記載のクローキングデバイス。
- 前記物体サイドハーフレンズおよび前記画像サイドハーフレンズが、円柱ハーフレンズ、非円柱ハーフレンズおよび色消しハーフレンズからなる群の中から選択される、請求項1から4のいずれかに記載のクローキングデバイス。
- 前記物体サイドハーフレンズは物体サイドハーフレンズ対を含み、前記物体サイドハーフレンズ対の一方の物体サイドハーフレンズは前記基準光学軸の一方の側に位置付けされ、前記物体サイドハーフレンズ対の他方の物体サイドハーフレンズが前記基準光学軸の他方の側に位置付けされており、
前記物体サイドハーフレンズ対の各物体サイドハーフレンズは、内向き表面、外向き凸状表面、厚端部および薄端部サイドを含み、前記内向き表面および前記外向き凸状表面は前記厚端部と前記薄端部の間に延在しており、
前記物体サイドハーフレンズ対の各物体サイドハーフレンズの前記薄端部は、前記基準光学軸に対し近位に位置付けされ、前記物体サイドハーフレンズ対の各物体サイドハーフレンズの前記厚端部は、前記基準光学軸に対し遠位に位置付けされており、
前記画像サイドハーフレンズは画像サイドハーフレンズ対を含み、前記画像サイドハーフレンズ対の一方の画像サイドハーフレンズは前記基準光学軸の一方の側に位置付けされ、前記画像サイドハーフレンズの他方の画像サイドハーフレンズは前記基準光学軸の他方の側に位置付けされており、
前記画像サイドハーフレンズ対の各画像サイドハーフレンズは、内向き表面、外向き凸状表面、厚端部および薄端部を含み、前記内向き表面および前記外向き凸状表面は前記厚端部と前記薄端部の間に延在しており、
前記画像サイドハーフレンズ対の各画像サイドハーフレンズの前記薄端部は、前記基準光学軸に対し近位に位置付けされ、前記画像サイドハーフレンズ対の各画像サイドハーフレンズの前記厚端部は、前記基準光学軸に対し遠位に位置付けされており、
前記平面反射境界は、平面反射境界対を含み、前記平面反射境界対の一方の平面反射境界は、前記基準光学軸の一方の側に位置付けされた前記物体サイドハーフレンズと前記画像サイドハーフレンズの間に位置付けされており、前記平面反射境界対の他方の平面反射境界は、前記基準光学軸の前記他方の側に位置付けされた前記物体サイドハーフレンズと前記画像サイドハーフレンズの間に位置付けされており、
前記平面反射境界対の各平面反射境界は、前記基準光学軸と平行に配向された内向きミラー表面を含み、
前記クローキングデバイスの前記物体サイドに位置付けされ前記被クローキング領域により視認不能化された物体からの前記光が、前記物体サイドハーフレンズ対、平面反射境界対および画像サイドハーフレンズ対により前記被クローキング領域の周りに方向変換されて前記クローキングデバイスの画像サイドに前記物体の画像を形成し、こうして前記物体からの前記光が前記被クローキング領域を通過したようにみえる、
請求項1から5のいずれかに記載のクローキングデバイス。 - 前記物体サイドハーフレンズ対の前記厚端部の厚さが互いに等しい、請求項6に記載のクローキングデバイス。
- 前記物体サイドハーフレンズ対の前記厚端部の厚さが互いに等しくない、請求項6に記載のクローキングデバイス。
- ビークルであって、
Aピラーと、
前記Aピラー上に位置付けされたクローキングデバイスであって、
前記クローキングデバイスが、物体サイド、画像サイド、被クローキング領域、および前記物体サイドから前記画像サイドまで延在する基準光学軸を含み、前記Aピラーが前記被クローキング領域内に位置付けされ、前記物体サイドが前記ビークルの外部に位置付けされ、前記画像サイドが前記ビークルの内部に位置付けされ、
前記クローキングデバイスが更に、物体サイドハーフレンズおよび画像サイドハーフレンズであって、各々が内向き表面、外向き凸状表面、厚端部および薄端部を含み、前記内向き表面および前記外向き凸状表面が前記厚端部と前記薄端部の間に延在している、物体サイドハーフレンズおよび画像サイドハーフレンズを含み、
前記クローキングデバイスが更に、前記物体サイドハーフレンズと前記画像サイドハーフレンズの間に位置付けされた平面反射境界であって、前記基準光学軸と平行に配向された内向きミラー表面を含む、平面反射境界を含む、
クローキングデバイスと、
を含み、
前記クローキングデバイスの物体サイドに位置付けされ前記被クローキング領域により視認不能化された物体からの光が、前記物体サイドハーフレンズを通る前記平面反射境界への前記光の伝播と、前記平面反射境界による前記画像サイドハーフレンズ上への前記物体サイドハーフレンズからの光の反射と、前記平面反射境界からの前記光の前記画像サイドハーフレンズを通る伝播と、を介して、前記Aピラーの周りに方向変換されて前記クローキングデバイスの画像サイドに前記物体の画像を形成し、こうして前記物体からの前記光が前記被クローキング領域を通過したようにみえる、
ビークル。 - 前記物体サイドハーフレンズおよび画像サイドハーフレンズの前記薄端部が、前記基準光学軸に対して近位に位置付けされ、前記物体サイドおよび画像サイドハーフレンズの前記厚端部が、前記基準光学軸に対して遠位に位置付けされている、請求項9に記載のビークル。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/677,341 US10564328B2 (en) | 2017-08-15 | 2017-08-15 | Cloaking devices with half lenses and plane mirrors and vehicles comprising the same |
| US15/677,341 | 2017-08-15 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019066825A JP2019066825A (ja) | 2019-04-25 |
| JP2019066825A5 JP2019066825A5 (ja) | 2020-07-27 |
| JP6989454B2 true JP6989454B2 (ja) | 2022-01-05 |
Family
ID=65361359
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018134887A Active JP6989454B2 (ja) | 2017-08-15 | 2018-07-18 | ハーフレンズおよび平面ミラーを備えたクローキングデバイスおよびこれを含むビークル |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10564328B2 (ja) |
| JP (1) | JP6989454B2 (ja) |
| CN (1) | CN109407291B (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020148959A (ja) * | 2019-03-14 | 2020-09-17 | トヨタ自動車株式会社 | 光学デバイス |
| CN114294610A (zh) * | 2022-01-11 | 2022-04-08 | 荣仪尚科光电技术(哈尔滨)有限公司 | 基于双透镜正正组合的自然光匀化照明装置和方法 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH075934U (ja) * | 1993-06-30 | 1995-01-27 | 岡田 稔 | フロントピラーによる死角を無くしたレンズ装置 |
| US20030047666A1 (en) | 2001-01-08 | 2003-03-13 | Alden Ray M. | Three-dimensional signature control process and apparatus with military application |
| JP2008191402A (ja) * | 2007-02-05 | 2008-08-21 | Nikon Corp | 光学素子 |
| CN101299079A (zh) * | 2008-05-13 | 2008-11-05 | 上海市第二中学 | 一种基于几何光学的隐形装置及其设计 |
| CN102436022B (zh) * | 2011-12-22 | 2013-03-27 | 浙江大学 | 一种利用各向异性介质构造的正方形柱状光波段隐身器件 |
| US9405118B1 (en) | 2012-05-14 | 2016-08-02 | Weimin Lu | Optical cloaking system |
| CN104742804B (zh) * | 2013-12-30 | 2017-02-15 | 鸿富锦精密工业(深圳)有限公司 | 汽车及该汽车的汽车盲区镜结构 |
| CN103912186B (zh) * | 2014-03-19 | 2015-11-18 | 广州中国科学院先进技术研究所 | 一种隐形窗框 |
| US9557547B2 (en) | 2014-07-24 | 2017-01-31 | University Of Rochester | Paraxial cloak design and device |
| JP2018524952A (ja) | 2015-04-21 | 2018-08-30 | ユニバーシティー オブ ロチェスター | クローキングシステム及び方法 |
| US9971162B2 (en) * | 2016-02-05 | 2018-05-15 | Toyota Motor Engineering & Manufacturing North America, Inc. | Apparatuses and methods for making an object appear transparent |
| CN105572768B (zh) * | 2016-02-19 | 2017-08-01 | 常州大学 | 基于反射原理的二维可见光隐装置 |
| US9994154B1 (en) * | 2016-12-09 | 2018-06-12 | Toyota Motor Engineering & Manufacturing North America, Inc. | Apparatuses and methods for making an object appear transparent |
| US10161720B2 (en) * | 2016-12-12 | 2018-12-25 | Toyota Jidosha Kabushiki Kaisha | Apparatuses and methods for making an object appear transparent |
-
2017
- 2017-08-15 US US15/677,341 patent/US10564328B2/en not_active Expired - Fee Related
-
2018
- 2018-07-18 JP JP2018134887A patent/JP6989454B2/ja active Active
- 2018-08-15 CN CN201810927424.0A patent/CN109407291B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN109407291A (zh) | 2019-03-01 |
| CN109407291B (zh) | 2022-03-04 |
| US20190056535A1 (en) | 2019-02-21 |
| US10564328B2 (en) | 2020-02-18 |
| JP2019066825A (ja) | 2019-04-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10161720B2 (en) | Apparatuses and methods for making an object appear transparent | |
| US7006303B2 (en) | Camera device | |
| JP7259105B2 (ja) | 平面および曲面ミラーを備えたクローキングデバイスおよびこれを含むビークル | |
| US20210048649A1 (en) | Folded camera prism design for preventing stray light | |
| JP3996498B2 (ja) | カメラ装置及び車両周辺視認装置 | |
| JP6989454B2 (ja) | ハーフレンズおよび平面ミラーを備えたクローキングデバイスおよびこれを含むビークル | |
| JP7377306B2 (ja) | 収束レンズ及びコヒーレント画像ガイドを備えるクローキングデバイス、並びにこれを備えるビークル | |
| WO2015098558A1 (ja) | 死角補助装置 | |
| JP7010781B2 (ja) | 湾曲ミラーを備えるクローキングデバイス | |
| JP6908581B2 (ja) | ハーフフレネルレンズおよび平面ミラーを備えたクローキングデバイスおよびこれを含むビークル | |
| JP2017181634A (ja) | 撮像装置及び車載カメラシステム | |
| JP7010867B2 (ja) | 収束レンズ及び六角柱を備えるクローキングデバイス、並びにこれを備えるビークル | |
| US11370358B2 (en) | Cloaking devices with tilt correction and vehicles comprising the same | |
| JP7201363B2 (ja) | レンズおよび平面ミラーを備えたクローキングデバイスおよびこれを含むビークル | |
| JP2002036952A (ja) | 車両周辺視認装置 | |
| US10663628B1 (en) | Cloaking devices with fresnel mirrors and plane mirrors and vehicles comprising the same | |
| JP2001318398A (ja) | 車両周辺視認装置 | |
| JP2020148959A (ja) | 光学デバイス |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200527 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200527 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210419 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210518 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211102 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211202 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6989454 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |