JP6973845B2 - 静電気粒子センサ - Google Patents
静電気粒子センサ Download PDFInfo
- Publication number
- JP6973845B2 JP6973845B2 JP2017008017A JP2017008017A JP6973845B2 JP 6973845 B2 JP6973845 B2 JP 6973845B2 JP 2017008017 A JP2017008017 A JP 2017008017A JP 2017008017 A JP2017008017 A JP 2017008017A JP 6973845 B2 JP6973845 B2 JP 6973845B2
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- outer housing
- sensor assembly
- amplifier
- electrostatic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000002245 particle Substances 0.000 title claims description 55
- 238000001514 detection method Methods 0.000 claims description 51
- 239000000428 dust Substances 0.000 claims description 14
- 239000000446 fuel Substances 0.000 claims description 13
- 239000012212 insulator Substances 0.000 claims description 12
- 230000027756 respiratory electron transport chain Effects 0.000 claims description 10
- 239000012530 fluid Substances 0.000 claims description 9
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 claims description 4
- 239000003570 air Substances 0.000 claims description 3
- 239000003921 oil Substances 0.000 claims description 3
- 239000004576 sand Substances 0.000 claims description 3
- 229910052710 silicon Inorganic materials 0.000 claims description 2
- 239000010703 silicon Substances 0.000 claims description 2
- 239000007789 gas Substances 0.000 description 27
- 238000000034 method Methods 0.000 description 19
- 238000002485 combustion reaction Methods 0.000 description 14
- 230000006870 function Effects 0.000 description 9
- 230000035945 sensitivity Effects 0.000 description 7
- 238000004891 communication Methods 0.000 description 6
- 238000010586 diagram Methods 0.000 description 6
- 230000008901 benefit Effects 0.000 description 4
- 239000000919 ceramic Substances 0.000 description 4
- 239000004020 conductor Substances 0.000 description 4
- 238000004887 air purification Methods 0.000 description 3
- 239000003990 capacitor Substances 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 238000012423 maintenance Methods 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 229910052751 metal Inorganic materials 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- 239000000758 substrate Substances 0.000 description 3
- 238000011144 upstream manufacturing Methods 0.000 description 3
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- 230000004888 barrier function Effects 0.000 description 2
- 239000000567 combustion gas Substances 0.000 description 2
- 229910052802 copper Inorganic materials 0.000 description 2
- 239000010949 copper Substances 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 239000013078 crystal Substances 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 239000010419 fine particle Substances 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 229910001120 nichrome Inorganic materials 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000008646 thermal stress Effects 0.000 description 2
- 101001128814 Pandinus imperator Pandinin-1 Proteins 0.000 description 1
- 101001024685 Pandinus imperator Pandinin-2 Proteins 0.000 description 1
- 238000009825 accumulation Methods 0.000 description 1
- PNEYBMLMFCGWSK-UHFFFAOYSA-N aluminium oxide Inorganic materials [O-2].[O-2].[O-2].[Al+3].[Al+3] PNEYBMLMFCGWSK-UHFFFAOYSA-N 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000005336 cracking Methods 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 229920006334 epoxy coating Polymers 0.000 description 1
- 239000011888 foil Substances 0.000 description 1
- 239000002737 fuel gas Substances 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 239000013618 particulate matter Substances 0.000 description 1
- 238000010248 power generation Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
Images












Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N15/06—Investigating concentration of particle suspensions
- G01N15/0656—Investigating concentration of particle suspensions using electric, e.g. electrostatic methods or magnetic methods
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N15/02—Investigating particle size or size distribution
- G01N15/0266—Investigating particle size or size distribution with electrical classification
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N2015/0042—Investigating dispersion of solids
- G01N2015/0046—Investigating dispersion of solids in gas, e.g. smoke
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/02—Indexing codes associated with the analysed material
- G01N2291/024—Mixtures
- G01N2291/02416—Solids in liquids
Landscapes
- Chemical & Material Sciences (AREA)
- Dispersion Chemistry (AREA)
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Other Investigation Or Analysis Of Materials By Electrical Means (AREA)
- Investigating Or Analyzing Materials By The Use Of Electric Means (AREA)
Description
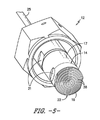
12:静電気センサ
14:外側ハウジング
15:電子機器ハウジング
16:電極
17:取付け部分
18:第1の端部
19:貫通穴
20:第2の端部
21:レンチ用平坦部
22:検知面
23:ねじ接合部
24:ハウジングの縁
25:ケーブル
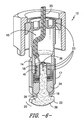
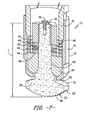
26:電子
28:増幅器
30:矢印
32:回路基板
33:半部分
34:絶縁体
35:締結具
36:締結具
37:ピンコネクタ
38:突起
40:内側平ワッシャ
41:ナット
42:内側傾斜ワッシャ
45:開放キャビティ
46:外側傾斜ワッシャ
48:間隙
49:間隙
50:回路トポロジ
52:第1の増幅器
54:第2の増幅器
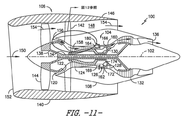
100:ガスタービンエンジン
102:中心軸線
104:コアエンジン
106:ファンセクション
108:外部ケーシング
120:環状入口
122:ブースタ
124:圧縮機
126:燃焼器
128:第1のタービン
130:第1の駆動シャフト
132:第2のタービン
134:第2の駆動シャフト
136:排出ノズル
138:ファンロータ
140:ファンケーシング
142:ガイドベーン
144:ロータブレード
146:下流セクション
148:空気流通路
150:矢印
152:入口
154:矢印
156:矢印
158:矢印
160:燃焼生成物
162:燃焼室
164:入口
165:ブースタ入口
166:出口
167:圧縮機入口
169:排出出口
170:圧縮機ブリード管
172:第1段タービンノズル
174:ノズルベーン
180:燃料ノズル
182:コントローラ
184:プロセッサ
186:記憶デバイス
188:通信モジュール
190:センサインタフェース
200:方法
202:方法ステップ
204:方法ステップ
206:方法ステップ
208:方法ステップ
Claims (20)
- 少なくとも1つの静電気センサ(12)を備えた統合型センサ組立体(10)であって、前記静電気センサは、
外側ハウジング(14)と、
前記外側ハウジング内に設けられ、所定の長さで隔てられた第1の端部(18)と第2の端部(20)とを備え、前記第2の端部は、前記外側ハウジングの縁(24)と実質的に面一の検知面(22)を備え、前記検知面を通過する1又は2以上の荷電粒子に対して前記第2の端部に向かう方向又は遠ざかる方向のいずれかに移動することによって応答するようになった複数の電子を含む、電極(16)と、
前記外側ハウジング内に設けられ、前記電極に電気的に結合され、前記検知面を通過する粒子レベルを電子移動の関数として検出するようになった増幅器(28)と、
前記外側ハウジング内に設けられ、前記センサに電気的に結合された回路基板(32)と、
を備え、
前記回路基板は、前記電極に隣接して配された、センサ組立体。 - 少なくとも1つの静電気センサ(12)を備えた統合型センサ組立体(10)であって、前記静電気センサは、
外側ハウジング(14)と、
前記外側ハウジング内に設けられ、所定の長さで隔てられた第1の端部(18)と第2の端部(20)とを備え、前記第2の端部は、前記外側ハウジングの縁(24)と実質的に面一の検知面(22)を備え、前記検知面を通過する1又は2以上の荷電粒子に対して前記第2の端部に向かう方向又は遠ざかる方向のいずれかに移動することによって応答するようになった複数の電子を含む、電極(16)と、
前記外側ハウジング内に設けられ、前記電極に電気的に結合され、前記検知面を通過する粒子レベルを電子移動の関数として検出するようになった増幅器(28)と、
前記外側ハウジング内に設けられ、前記センサに電気的に結合された回路基板(32)と、
を備え、
前記電極の前記検知面は、所定の半径を有する湾曲面を備える、センサ組立体。 - 前記増幅器は、広帯域シリコン・オン・インシュレータ(SOI)演算増幅器を含む、請求項1に記載のセンサ組立体。
- 少なくとも1つの静電気センサ(12)を備えた統合型センサ組立体(10)であって、前記静電気センサは、
外側ハウジング(14)と、
前記外側ハウジング内に設けられ、所定の長さで隔てられた第1の端部(18)と第2の端部(20)とを備え、前記第2の端部は、前記外側ハウジングの縁(24)と実質的に面一の検知面(22)を備え、前記検知面を通過する1又は2以上の荷電粒子に対して前記第2の端部に向かう方向又は遠ざかる方向のいずれかに移動することによって応答するようになった複数の電子を含む、電極(16)と、
前記外側ハウジング内に設けられ、前記電極に電気的に結合され、前記検知面を通過する粒子レベルを電子移動の関数として検出するようになった増幅器(28)と、
前記外側ハウジング内に設けられ、前記センサに電気的に結合された回路基板(32)と、
を備え、
前記増幅器は、1フェムトアンペア乃至5フェムトアンペアの漏れ電流を有し、
前記回路基板における前記センサと接続される抵抗器は、1Gオームを超えるインピーダンスを有する、センサ組立体。 - 前記増幅器は、摂氏−55度(℃)乃至250℃の範囲の動作温度を有する、請求項1に記載のセンサ組立体。
- 前記粒子レベルを示す1又は2以上の信号を前記回路基板から受け取るようになったコントローラをさらに備える、請求項1に記載のセンサ組立体。
- 前記静電気センサは、前記外側ハウジング内に設けられた1又は2以上の絶縁体をさらに備える、請求項1に記載のセンサ組立体。
- 前記静電気センサの前記外側ハウジングは、エンジンの1又は2以上の既存の部位に取り付けられるようになった所定の形状を備える、請求項1に記載のセンサ組立体。
- 前記エンジンの前記1又は2以上の既存の部位は、前記エンジンのボアスコープポート、圧縮機入口、圧縮機ブリード管、ブースタ入口、又はタービン若しくはアフタバーナ出口のうちの少なくとも1つを含む、請求項8に記載のセンサ組立体。
- 前記静電気センサは、流体媒体内のダスト、デブリ、氷、砂、火山灰、又は浮遊微粒子のうちの少なくとも1つを検出するようになっており、前記流体媒体は、空気、水、オイル、又は燃料のうちの少なくとも1つを含む、請求項1に記載のセンサ組立体。
- 少なくとも1つの静電気センサ(12)を備えた統合型マルチチップモジュール(MCM)センサ組立体(10)であって、前記静電気センサは、
外側ハウジング(14)と、
前記外側ハウジング内に設けられ、第1の端部(18)と、検知面(22)を有する対
向した第2の端部(20)とを備え、前記検知面を通過する1又は2以上の荷電粒子に対して前記第2の端部に向かう方向又は遠ざかる方向のいずれかに移動することによって応答するようになった複数の電子を含む、電極(16)と、
前記外側ハウジング内に設けられ、前記電極に電気的に結合され、前記検知面を通過する粒子レベルを電子移動の関数として検出するようになった増幅器(28)と、
前記センサに電気的に結合された回路基板(32)と、
を備え、
前記回路基板は、前記電極に隣接して配された、センサ組立体。 - 少なくとも1つの静電気センサ(12)を備えたセンサ組立体(10)であって、前記静電気センサは、
外側ハウジング(14)と、
前記外側ハウジング内に少なくとも部分的に設けられ、所定の長さで隔てられた第1の端部(18)と第2の端部(20)とを備え、前記第1の端部は前記外側ハウジング内に固定され、前記第2の端部は前記外側ハウジングの縁(24)を越えて延びた検知面(22)を備え、前記検知面を通過する1又は2以上の荷電粒子に対して前記第2の端部に向かう方向又は遠ざかる方向のいずれかに移動することによって応答するようになった複数の電子を含む、電極(16)と、
ケーブル(25)を介して前記センサに電気的に結合された回路基板(32)と、
を備え、
前記検知面は、1又は2以上の突起を備える、センサ組立体。 - 前記電極の前記第2の端部は、所定の半径を有する湾曲面を備える、請求項12に記載のセンサ組立体。
- 前記外側ハウジング内に設けられ、前記電極に電気的に結合され、前記検知面を通過する粒子レベルを電子移動の関数として検出するようになった増幅器(28)をさらに備える、請求項12又は13に記載のセンサ組立体。
- 前記増幅器は、広帯域シリコン・オン・インシュレータ(SOI)演算増幅器を備え、前記増幅器は、1フェムトアンペア乃至5フェムトアンペアの漏れ電流を有する、請求項14に記載のセンサ組立体。
- 前記回路基板における前記センサと接続される抵抗器は、1Gオームを超えるインピーダンスを有し、前記増幅器は、摂氏−55度(℃)乃至250℃の範囲の動作温度を有し、前記検知面は、摂氏−55度(℃)乃至550℃の範囲の動作温度を有する、請求項14に記載のセンサ組立体。
- 前記静電気センサは、前記外側ハウジング内に設けられた1又は2以上の絶縁体をさらに備える、請求項12に記載のセンサ組立体。
- 前記静電気センサは、前記外側ハウジング内に、前記電極を固定する1又は2以上の機械的締結具をさらに備える、請求項17に記載のセンサ組立体。
- 前記1又は2以上の機械的締結具は、平ワッシャ、傾斜ワッシャ、ナット、ねじ、又はねじ山のうちの少なくとも1つを含む、請求項18に記載のセンサ組立体。
- 前記静電気センサは、流体媒体内のダスト、デブリ、氷、砂、火山灰、又は浮遊微粒子のうちの少なくとも1つを検出するようになっており、前記流体媒体は、空気、水、オイル、又は燃料のうちの少なくとも1つを含む、請求項12に記載のセンサ組立体。
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/007,289 US9714967B1 (en) | 2016-01-27 | 2016-01-27 | Electrostatic dust and debris sensor for an engine |
| US15/007,289 | 2016-01-27 | ||
| US15/007,282 | 2016-01-27 | ||
| US15/007,282 US10073008B2 (en) | 2016-01-27 | 2016-01-27 | Electrostatic sensor |
| US15/375,882 | 2016-12-12 | ||
| US15/375,882 US9651469B1 (en) | 2016-01-27 | 2016-12-12 | Electrostatic particle sensor |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017134066A JP2017134066A (ja) | 2017-08-03 |
| JP6973845B2 true JP6973845B2 (ja) | 2021-12-01 |
Family
ID=57758551
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017008017A Active JP6973845B2 (ja) | 2016-01-27 | 2017-01-20 | 静電気粒子センサ |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9651469B1 (ja) |
| EP (2) | EP3199940B1 (ja) |
| JP (1) | JP6973845B2 (ja) |
| CN (2) | CN117092002A (ja) |
| CA (1) | CA2955451A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SG184833A1 (en) * | 2010-04-14 | 2012-11-29 | Emd Millipore Corp | Methods of producing high titer, high purity virus stocks and methods of use thereof |
| JP6934113B2 (ja) * | 2017-12-11 | 2021-09-08 | ヒューレット−パッカード デベロップメント カンパニー エル.ピー.Hewlett‐Packard Development Company, L.P. | 流体の粒子濃度の検出 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4531402A (en) * | 1983-05-02 | 1985-07-30 | Battelle Development Corp. | Apparatus and method for measuring the concentration of large particles in a gas |
| US4531486A (en) * | 1983-05-02 | 1985-07-30 | Battelle Development Corporation | Apparatus and method for measuring the concentration of particles in a gas |
| BR0107533A (pt) * | 2000-03-31 | 2003-06-10 | Worcester Polytech Inst | Método para detectar e medir inclusões em um fluido e aparelho para medir inclusões em um lìquido |
| CN100592070C (zh) * | 2006-04-25 | 2010-02-24 | 何宗彦 | 现场检测气溶胶粒子浓度的方法及其检测仪 |
| US8037738B2 (en) * | 2008-05-16 | 2011-10-18 | Fram Group Ip Llc | Particulate matter sensor |
| JP5438538B2 (ja) * | 2010-02-08 | 2014-03-12 | 日本碍子株式会社 | 異常判定機能付き装置、及び異常判定方法 |
| GB2482480A (en) | 2010-08-02 | 2012-02-08 | Lockheed Martin Uk Insys Ltd | An electrostatic particle ingress inhibitor |
| US8459103B2 (en) * | 2011-06-24 | 2013-06-11 | United Technologies Corporation | IDMS signal processing to distinguish inlet particulates |
| US9010198B2 (en) * | 2011-07-29 | 2015-04-21 | United Technologies Corporation | Aircraft debris monitoring sensor assembly |
| GB201410283D0 (en) * | 2014-06-10 | 2014-07-23 | Cambridge Entpr Ltd | Sensing methods and apparatus |
-
2016
- 2016-12-12 US US15/375,882 patent/US9651469B1/en active Active
-
2017
- 2017-01-16 EP EP17151613.1A patent/EP3199940B1/en active Active
- 2017-01-16 EP EP21202633.0A patent/EP4001894B1/en active Active
- 2017-01-19 CA CA2955451A patent/CA2955451A1/en active Pending
- 2017-01-20 JP JP2017008017A patent/JP6973845B2/ja active Active
- 2017-01-25 CN CN202310851120.1A patent/CN117092002A/zh active Pending
- 2017-01-25 CN CN201710055889.7A patent/CN107024418A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| EP3199940A1 (en) | 2017-08-02 |
| EP3199940B1 (en) | 2022-03-30 |
| CA2955451A1 (en) | 2017-07-27 |
| EP4001894A1 (en) | 2022-05-25 |
| CN107024418A (zh) | 2017-08-08 |
| JP2017134066A (ja) | 2017-08-03 |
| CN117092002A (zh) | 2023-11-21 |
| US9651469B1 (en) | 2017-05-16 |
| EP4001894B1 (en) | 2024-11-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6397515B2 (ja) | エンジンのための静電気ダスト及びデブリセンサ | |
| JP6937580B2 (ja) | エンジンのための静電気ダストセンサ | |
| JP6973845B2 (ja) | 静電気粒子センサ | |
| US10436612B2 (en) | Encapsulated soft-lead capacitance probe for a gas turbine engine | |
| CN111323729A (zh) | 探头加热器phm的电弧检测及剩余使用寿命预测 | |
| RU2315900C1 (ru) | Сигнализатор наличия металлических частиц в системе смазки | |
| EP0120087B1 (en) | Noncontact electrostatic hoop probe for combustion engines | |
| US9320181B1 (en) | System and method for dissipating thermal energy away from electronic components in a rotatable shaft | |
| US9240660B1 (en) | Slip ring assembly and method for impedance matching high frequency signals across the slip ring assembly | |
| US11422081B2 (en) | Sensor for use in an exhaust gas stream of an internal combustion engine | |
| US20210003458A1 (en) | Method and system for measuring temperature in a gas turbine engine | |
| US10359383B2 (en) | Method of detecting galvanic insulation integrity | |
| US20160138426A1 (en) | System for packaging electronic components in a rotatable shaft | |
| FR3075877A1 (fr) | Systeme de detection d'une anomalie de temperature dans le compartiment inter-veines d'un turboreacteur a double flux |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20190402 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200116 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210215 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210517 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211004 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211028 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6973845 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |