JP6962007B2 - Driving control device for autonomous driving trolley, autonomous driving trolley - Google Patents
Driving control device for autonomous driving trolley, autonomous driving trolley Download PDFInfo
- Publication number
- JP6962007B2 JP6962007B2 JP2017109781A JP2017109781A JP6962007B2 JP 6962007 B2 JP6962007 B2 JP 6962007B2 JP 2017109781 A JP2017109781 A JP 2017109781A JP 2017109781 A JP2017109781 A JP 2017109781A JP 6962007 B2 JP6962007 B2 JP 6962007B2
- Authority
- JP
- Japan
- Prior art keywords
- probability distribution
- autonomous
- sensor
- traveling
- self
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 claims description 11
- 230000002194 synthesizing effect Effects 0.000 claims description 8
- 230000004807 localization Effects 0.000 claims description 3
- 238000013507 mapping Methods 0.000 claims description 3
- 230000007613 environmental effect Effects 0.000 description 13
- 238000012545 processing Methods 0.000 description 12
- 238000000034 method Methods 0.000 description 10
- 238000006243 chemical reaction Methods 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 230000033001 locomotion Effects 0.000 description 4
- 238000005259 measurement Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000003786 synthesis reaction Methods 0.000 description 1
Images










Landscapes
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
本発明は、自律走行台車の走行制御装置及び自律走行台車に関する。 The present invention relates to a traveling control device for an autonomous traveling vehicle and an autonomous traveling vehicle.
従来から、周囲環境の中を自律して移動する自律走行台車が知られている。自律移動のためには、移動空間内の物体(以下、障害物と称す)が存在する領域と存在しない領域とを表した環境地図が必要となる。様々な環境地図の取得方法が考案されている中で、近年、移動しつつ、リアルタイムで自己位置の推定と環境地図の作成とを行う技術として、SLAM(Simultaneous Localization and Mapping)が注目されている。SLAMを利用した自律走行台車は、距離センサによる距離計測の結果得られた地形データを用いて環境地図を予め作成しておき、自律移動時においては環境地図と各時点の距離データをマップマッチングさせることにより、自己位置推定を行う(例えば、特許文献1を参照)。 Conventionally, autonomous traveling trolleys that move autonomously in the surrounding environment have been known. For autonomous movement, an environmental map showing an area where an object (hereinafter referred to as an obstacle) exists and an area where an object (hereinafter referred to as an obstacle) exists in the moving space is required. While various environmental map acquisition methods have been devised, in recent years, SLAM (Simultaneus Localization and Mapping) has been attracting attention as a technique for estimating a self-position and creating an environmental map in real time while moving. .. For autonomous traveling trolleys using SLAM, an environmental map is created in advance using the terrain data obtained as a result of distance measurement by a distance sensor, and the environmental map and the distance data at each time point are map-matched during autonomous movement. Thereby, self-position estimation is performed (see, for example, Patent Document 1).
従来の自律走行台車では、自律走行台車を屋内のみではなく屋外でも走行させることが要求されている。しかし、その場合には下記の問題点が考えられる。
第1に、グラウンドのような広い環境においては、距離センサのセンシング有効距離に物体が存在しない可能性が高い。そのため、環境地図を正常に作成できず、自律走行台車の自己位置推定が困難になる。
第2に、センシング有効距離に周辺物体が存在したとしても、状況により正確に測距できない場合がある。例えば、距離センサにLRFを使用していて、強い太陽光による外乱の影響を受けた場合である。
In the conventional autonomous driving trolley, it is required to run the autonomous traveling trolley not only indoors but also outdoors. However, in that case, the following problems can be considered.
First, in a wide environment such as the ground, there is a high possibility that no object exists at the sensing effective distance of the distance sensor. Therefore, the environmental map cannot be created normally, and it becomes difficult to estimate the self-position of the autonomous driving vehicle.
Secondly, even if there are peripheral objects in the effective sensing distance, it may not be possible to measure the distance accurately depending on the situation. For example, when LRF is used for the distance sensor and it is affected by the disturbance caused by strong sunlight.
したがって、自律走行台車の走行可能範囲を屋内から屋外まで拡大するためには、距離センサ以外の何らかのセンサを併用した自己位置推定が必要となる。
なお、GPS受信機とレーザレーダを屋外と屋内で切り替えることができる無人搬送車が知られている(特許文献2を参照)。しかし、この無人搬送車では、屋外であっても例えば建物の近傍を走行する際にはGPSが十分に機能しない、という問題を解消できない。
Therefore, in order to expand the travelable range of the autonomous driving vehicle from indoors to outdoors, it is necessary to estimate the self-position using some kind of sensor other than the distance sensor.
An automatic guided vehicle capable of switching between a GPS receiver and a laser radar indoors and outdoors is known (see Patent Document 2). However, this automatic guided vehicle cannot solve the problem that GPS does not function sufficiently even when traveling outdoors, for example, in the vicinity of a building.
本発明の目的は、自律走行台車を屋内及び屋外でシームレスに走行可能にすることにある。 An object of the present invention is to enable an autonomous traveling vehicle to travel seamlessly indoors and outdoors.
以下に、課題を解決するための手段として複数の態様を説明する。これら態様は、必要に応じて任意に組み合せることができる。 Hereinafter, a plurality of aspects will be described as means for solving the problem. These aspects can be arbitrarily combined as needed.
本発明の一見地に係る走行制御装置は、自律走行台車から周囲にある障害物までの距離を二次元的に又は三次元的に取得する第1のセンサと、地上における自律走行台車の絶対位置を取得する第2のセンサと、走行部とを含み、移動環境を計画的に又は無計画に自律的に移動する自律走行台車に用いられる。
走行制御装置は、ストレージと、入出力装置と、演算装置とを有している。
ストレージは、移動環境の地図を記憶する。
入出力装置は、第1のセンサ及び第2のセンサのデータが入力され、且つ走行指令を走行部に出力する。
演算装置は、下記の動作を実行する。
◎第1のセンサのデータと移動環境の地図を用いて移動環境の地図上における自律走行台車の自己位置を第1の確率分布として求める。
◎第2のセンサのデータを用いて、自律走行台車の自己位置を第2の確率分布として求める。
◎第1の確率分布と第2の確率分布とを合成して第3の確率分布を作成する。
◎第3の確率分布のピーク位置を、移動環境における自律走行台車の自己位置として決定する。
◎決定した自己位置に基づいて走行指令を作成する。
この走行制御装置では、自律走行台車は、屋内及び屋外でシームレスに走行する。特に、第1のセンサのデータと移動環境の地図を用いて得られた第1の確率分布と、第2のセンサのデータを用いて得られた第2の確率分布とを合成して第3の確率分布を作成し、そのピーク位置を自己位置として決定するので、走行環境に従って最も適切な自己位置推定が可能である。例えば、屋内では、第1の確率分布を重視することで、自己位置を正確に把握できる。また、屋外で近くに建物等の障害物がない領域では、第2の確率分布を重視することで、自己位置を正確に把握できる。さらに、屋外で近くに建物等の障害物がある領域では、障害物がない場合に比べて第1の確率分布を重視することで自己位置を正確に把握できる。
The travel control device according to the seemingly present invention includes a first sensor that two-dimensionally or three-dimensionally acquires the distance from the autonomous driving vehicle to surrounding obstacles, and an absolute position of the autonomous driving vehicle on the ground. It is used for an autonomous driving vehicle that autonomously moves in a moving environment systematically or unplannedly, including a second sensor for acquiring the above and a traveling unit.
The travel control device includes a storage, an input / output device, and an arithmetic unit.
The storage stores a map of the mobile environment.
The input / output device inputs the data of the first sensor and the second sensor, and outputs a travel command to the travel unit.
The arithmetic unit performs the following operations.
◎ Using the data of the first sensor and the map of the moving environment, the self-position of the autonomous traveling trolley on the map of the moving environment is obtained as the first probability distribution.
◎ Using the data of the second sensor, the self-position of the autonomous driving bogie is obtained as the second probability distribution.
◎ A third probability distribution is created by synthesizing the first probability distribution and the second probability distribution.
◎ The peak position of the third probability distribution is determined as the self-position of the autonomous driving vehicle in the moving environment.
◎ Create a running command based on the determined self-position.
In this travel control device, the autonomous traveling trolley travels seamlessly indoors and outdoors. In particular, a third is a combination of the data of the first sensor, the first probability distribution obtained by using the map of the moving environment, and the second probability distribution obtained by using the data of the second sensor. Since the probability distribution of is created and the peak position is determined as the self-position, the most appropriate self-position estimation is possible according to the driving environment. For example, indoors, by emphasizing the first probability distribution, the self-position can be accurately grasped. Further, in an area where there are no obstacles such as buildings nearby outdoors, the self-position can be accurately grasped by emphasizing the second probability distribution. Further, in an area where there is an obstacle such as a building outdoors, the self-position can be accurately grasped by emphasizing the first probability distribution as compared with the case where there is no obstacle.
演算装置は、第1のセンサの検出量に応じて、第1の確率分布と第2の確率分布を合成する係数を変更してもよい。
この走行制御装置では、第1のセンサの検出量に応じて上記係数を変更するので、上記検出量が多い場合は第1の確率分布を強くかつ第2の確率分布を弱く第3の確率分布に反映でき、逆に上記検出量が少ない場合は第1の確率分布を弱くかつ第2の確率分布を強く第3の確率分布に反映できる。
The arithmetic unit may change the coefficient for synthesizing the first probability distribution and the second probability distribution according to the detection amount of the first sensor.
In this travel control device, the above coefficient is changed according to the detection amount of the first sensor. Therefore, when the detection amount is large, the first probability distribution is strong and the second probability distribution is weak, and the third probability distribution is weak. On the contrary, when the detected amount is small, the first probability distribution can be weakly reflected and the second probability distribution can be strongly reflected in the third probability distribution.
演算装置は、移動環境の地図上における自律走行台車の推定自己位置に応じて、第1の確率分布と第2の確率分布を合成する係数を変更してもよい。
この走行制御装置では、自律走行台車の推定位置に応じて上記係数を変更するので、正確な位置及び周囲の状況に応じて第1の確率分布及び第2の確率分布を第3の確率分布に反映できる。
The arithmetic unit may change the coefficient for synthesizing the first probability distribution and the second probability distribution according to the estimated self-position of the autonomous traveling vehicle on the map of the moving environment.
In this travel control device, the above coefficient is changed according to the estimated position of the autonomous driving vehicle, so that the first probability distribution and the second probability distribution are changed to the third probability distribution according to the accurate position and the surrounding conditions. Can be reflected.
自律走行台車が、屋内環境と屋外環境とをシームレスに走行するものであり、
自律走行台車が屋外環境にある場合に第2の確率分布がより強く反映される係数が設定されてもよい。
この走行制御装置では、屋外では屋内に比べて第2の確率分布がより強く反映されるので、屋外を走行中の自己位置推定がより正確になる。
The autonomous driving trolley runs seamlessly between the indoor environment and the outdoor environment.
A coefficient may be set that more strongly reflects the second probability distribution when the autonomous vehicle is in an outdoor environment.
In this travel control device, the second probability distribution is more strongly reflected outdoors than indoors, so that the self-position estimation while traveling outdoors becomes more accurate.
第1のセンサが自律走行台車から障害物までの距離を二次元的に取得するレーザレンジセンサであり、移動環境の地図と第1の確率分布がSLAM(Simultaneous Localization and Mapping)により作成されるものであってもよい。
この走行制御装置では、SLAMが採用されているので、第1の確率分布による自己位置推定がより正確になる。
The first sensor is a laser range sensor that two-dimensionally acquires the distance from the autonomous driving vehicle to an obstacle, and a map of the moving environment and the first probability distribution are created by SLAM (Simultaneus Localization and Mapping). It may be.
Since SLAM is adopted in this travel control device, the self-position estimation by the first probability distribution becomes more accurate.
第2のセンサが、衛星測位システム(Navigation Satellite System)の受信機であり、入出力装置にはRTK(Real Time Kinematic)測位により求められた絶対位置が入力されてもよい。
この走行制御装置では、衛星測位システムが採用されているので、第2の確率分布による自己位置推定がより正確になる。
The second sensor is a receiver of a satellite positioning system (Navigation Satellite System), and an absolute position obtained by RTK (Real Time Kinematic) positioning may be input to the input / output device.
Since the satellite positioning system is adopted in this travel control device, the self-position estimation by the second probability distribution becomes more accurate.
本発明の他の見地に係る自律走行台車は、移動環境を計画的に又は無計画に自律的に移動する。自律走行台車は、第1のセンサと、第2のセンサと、走行部と、上記の走行制御装置とを有している。
自律走行台車は、屋内及び屋外でシームレスに走行する。特に、第1のセンサのデータと移動環境の地図を用いて得られた第1の確率分布と、第2のセンサのデータを用いて得られた第2の確率分布とを合成して第3の確率分布を作成し、そのピーク位置を自己位置として決定するので、走行環境に従って最も適切な自己位置推定が可能である。例えば、屋内では、第1の確率分布を重視することで、自己位置を正確に把握できる。また、屋外で近くに建物等の障害物がない領域では、第2の確率分布を重視することで、自己位置を正確に把握できる。さらに、屋外で近くに建物等の障害物がある領域では、障害物がない場合に比べて第1の確率分布を重視することで、自己位置を正確に把握できる。
The autonomous driving vehicle according to another aspect of the present invention autonomously moves in a moving environment in a planned or unplanned manner. The autonomous traveling vehicle has a first sensor, a second sensor, a traveling unit, and the traveling control device described above.
Autonomous trolleys run seamlessly indoors and outdoors. In particular, a third is a combination of the data of the first sensor, the first probability distribution obtained by using the map of the moving environment, and the second probability distribution obtained by using the data of the second sensor. Since the probability distribution of is created and the peak position is determined as the self-position, the most appropriate self-position estimation is possible according to the driving environment. For example, indoors, by emphasizing the first probability distribution, the self-position can be accurately grasped. Further, in an area where there are no obstacles such as buildings nearby outdoors, the self-position can be accurately grasped by emphasizing the second probability distribution. Further, in an area where there is an obstacle such as a building outdoors, the self-position can be accurately grasped by emphasizing the first probability distribution as compared with the case where there is no obstacle.
本発明では、自律走行台車は屋内及び屋外でシームレスに走行可能になる。 In the present invention, the autonomous traveling vehicle can travel seamlessly indoors and outdoors.
1.第1実施形態
(1)自律走行台車の全体構成
本実施形態の自律走行台車1は、距離センサとマップマッチングを使用したSLAMによる自己位置推定と、GNSS(Global Navigation Satellite System/全球測位衛星システム)の測位結果とを組み合わせて、自律走行台車1の走行可能範囲を屋内から屋外まで拡大させる技術を実現している。これにより、自律走行台車1は、屋内環境と屋外環境とをシームレスに走行できる。
1. 1. 1st Embodiment (1) Overall configuration of autonomous driving trolley The
以下、図1を用いて、本発明の第1実施形態による自律走行台車1の全体構成を説明する。図1は、第1実施形態の自律走行台車の構成を示す概略ブロック図である。
自律走行台車1は、走行部3を有する。走行部3は、自律走行台車1の本体に備えられ、自律走行台車1を走行駆動する。
Hereinafter, the overall configuration of the
The
自律走行台車1は、距離センサ5を有する。距離センサ5は、自律走行台車1から周囲にある障害物までの距離を二次元的に又は三次元的に取得するためのセンサである。距離センサ5は、二次元的に距離を取得するものとして、具体的には、自律走行台車1の走行方向前後にそれぞれ設けられた前方レーザレンジセンサ及び後方レーザレンジセンサである。
レーザレンジセンサは、例えば、レーザ発振器によりパルス発振されたレーザ光を障害物などの目標物に照射し、目標物から反射した反射光をレーザ受信機により受信することにより、目標物までの距離を算出するレーザレンジファインダ(LRF:Laser Range Finder)である。これらは、照射するレーザ光を回転ミラーを用いて所定の角度で扇状にレーザ光を走査できる。
また、距離センサ5は、三次元的に距離を取得するものとして、ステレオカメラやTOF(Time Of Flight)カメラを採用できる。
The
The laser range sensor, for example, irradiates a target object such as an obstacle with a laser beam pulse-oscillated by a laser oscillator, and receives the reflected light reflected from the target object by a laser receiver to reduce the distance to the target object. It is a laser range finder (LRF: Laser Range Finder) to calculate. These can scan the laser beam in a fan shape at a predetermined angle by using a rotating mirror to irradiate the laser beam.
Further, as the
自律走行台車1は、制御部7(演算装置の一例)を有する。制御部7は、CPU(Central Processing Unit)、ストレージとしての記憶装置(RAM(Random Access Memory)、ROM(Read Only Memory)、HDD(Hard Disk Drive)又はSSD(Solid State Drive)などの記憶装置により構成される)、及び各種インターフェースなどを備えるコンピュータである。後述する制御部7の各構成要素の機能の一部又は全部は、上記の記憶装置に記憶された所定のプログラムを実行することで実現されてもよい。
または、制御部7の各構成要素の機能の一部又は全部は、カスタムICなどのハードウェアにより実現されていてもよい。
The
Alternatively, a part or all of the functions of each component of the
自律走行台車1は、操作部9を備える。操作部9は、操作者の手動操作による指示入力を受け付ける。操作部9は、自律走行台車1を手動操作により走行させる際に、操作者が操作するユーザインターフェースであって、走行速度の指示を受け付けるスロットル、走行方向の指示を受け付けるハンドルなどを備える。
自律走行台車1は、表示部10を有する。表示部10は、現在の走行状況に関する情報、その他の各種情報を表示するものであって、液晶ディスプレイ、LEDランプなどで構成される。
The
The
自律走行台車1は、GNSS(Global Navigation Satellite System:全地球航法衛星システム)受信機11を有している。GNSS受信機11から、制御部7には、RTK(Real Time Kinematic)測位により求められた現在地の絶対座標(緯度/経度)が入力される。現在地の絶対座標は記憶部27(後述)に保存される。
The
(2)走行部の詳細構成
図1を用いて、走行部3を詳細に説明する。走行部3は、2つの走行車輪13a、13bを有している。
走行部3は、さらに、走行車輪13a、13bにそれぞれ対応して、一対のモータ15a、15bと、エンコーダ17a、17bと、モータ駆動部19a、19bとを有する。一対のモータ15a、15bの、出力回転軸には、走行車輪13a、13bが接続されている。
(2) Detailed Configuration of
The traveling
エンコーダ17a、17bは、それぞれ、モータ15aの出力回転軸及びモータ15bの出力回転軸に接続され、モータ15a、15bの回転位置を検出する。
モータ駆動部19a、19bは、それぞれ、走行制御部29(後述)から入力される制御量と、対応するエンコーダ17a、17bにより検出されるモータ15a、15bの回転位置とに基づいて、対応するモータ15a、15bをフィードバック制御する。
The
The
(3)制御部の詳細構成
図1を用いて、制御部7を詳細に説明する。制御部7は、障害物情報変換部21と、教示データ作成部23と、SLAM処理部25と、記憶部27と、走行制御部29と、入出力装置としてのI/Oポート31とを有する。
障害物情報変換部21は、距離センサ5の検出信号を、自律走行台車1の周囲に存在する障害物の位置情報に変換する。例えば、障害物情報変換部21は、上記検出信号を、所定の座標上の座標値である障害物の位置情報に変換する。
(3) Detailed Configuration of
The obstacle
教示データ作成部23は、教示走行モードにおける通過時刻と通過時刻に対応する通過点データの集合である走行スケジュールを作成する。
SLAM処理部25は、位置推定と環境地図作成とを同時に行うSLAM処理を実行する(後述)。
The teaching
The
記憶部27(ストレージの一例)は、制御部7の記憶装置の記憶領域の少なくとも一部に形成された記憶領域である。記憶部27は、環境地図復元用データと、環境地図とを記憶する。
環境地図復元用データは、自律走行台車1が移動する移動領域の所定の位置にて距離センサ5により予め取得された障害物の位置情報である。環境地図は、地図作成部33により、前回の位置推定時に作成された環境地図である。
The storage unit 27 (an example of storage) is a storage area formed in at least a part of the storage area of the storage device of the
The environmental map restoration data is the position information of the obstacle acquired in advance by the
記憶部27は、さらに、走行スケジュールを記憶している。走行スケジュールは、再現走行モードの実行時において自律走行台車1が自律的に移動する走行経路を示すものである。再現走行モードの実行時に、自律走行台車1は、走行スケジュールに示された目標位置を参照し、当該目標位置に到達するように走行部3を制御する。
走行制御部29は、入力される走行指令に基づいて、モータ15a、15bの制御量を生成し、走行部3に出力する。走行制御部29は、例えば、モーションコントローラである。
The
The
上記走行指令は、教示走行モードにおいては、操作部9を介して入力される操作者からの指示入力である。一方、再現走行モードにおいては、上記走行指令は、SLAM処理部25により推定される環境地図上の位置と走行スケジュールとの比較に基づいて、生成される。
I/Oポート31には、距離センサ5及びGNSS受信機11のデータが入力される。さらに、I/Oポート31は、制御量を走行部3に出力する。
The travel command is an instruction input from the operator that is input via the
The data of the
(4)SLAM処理部の詳細構成
図1を用いて、SLAM処理部25を詳細に説明する。
SLAM処理部25は、地図作成部33と、自己位置推定部35と、を有する。
(4) Detailed Configuration of SLAM Processing Unit The
The
地図作成部33は、距離センサ5により取得した障害物の位置情報に基づいて、自律走行台車1の走行経路を含む環境地図をグローバルマップとして作成する。
地図作成部33は、教示走行モードにおいて、自律走行台車1の周囲に位置する障害物の位置情報を取得した時刻に対応させ、それを環境地図復元用データとして記憶部27に記憶する。
地図作成部33は、再現走行モードにおいて、現在の通過点よりも先の時刻に対応する環境地図復元用データを記憶部27から読み出して、それに基づいてグローバルマップを更新する。
The
The
In the reproduction travel mode, the
自己位置推定部35は、SLAM確率分布を下記の動作によって求める機能を有している。なお、以下の(I)〜(V)の説明では、自律走行台車1が第1位置P1から第2位置P2に移動したとする。また、各位置において最終的に得られる確率は「事後確率」であり、それは次の位置における「事前確率」として用いられる。
(I) 自己位置推定部35は、第2位置P2に自律走行台車1が存在するときに、その位置にて距離センサ5を用いてローカルマップ(障害物の位置情報)を作成する。
(II) 自己位置推定部35は、デッドレコグニング(走行部3による移動量(本実施形態においては、エンコーダ17a、17bから得られる走行車輪13a、13bの回転数から算出される))による推定位置P2’に、第1位置P1の事後確率(=第2位置P2の事前確率)を配置する。
(III) 自己位置推定部35は、(I)で作成されたローカルマップを、推定位置P2’を中心に移動させた仮の自己位置における複数の仮ローカルマップとして、複数の仮ローカルマップとグローバルマップと照合する(マップマッチング)ことで、それぞれの一致度を算出する。これにより、各仮ローカルマップの尤度が得られる。
(IV) (II)での第1位置P1の事後確率(=第2位置P2の事前確率)と(III)の各尤度を掛け合わせることで、各仮の自己位置における事後確率が算出される。
(V) 算出された複数の事後確率のうち、例えば最も高いピークを持つものが、SLAM確率分布として選択される。
The self-
(I) When the
(II) The self-
(III) The self-
(IV) By multiplying the posterior probabilities of the first position P1 in (II) (= prior probabilities of the second position P2) and the likelihoods of (III), the posterior probabilities at each temporary self-position are calculated. NS.
(V) Of the plurality of calculated posterior probabilities, for example, the one having the highest peak is selected as the SLAM probability distribution.
自己位置推定部35は、さらに、GNSS受信機11のデータを用いて、自律走行台車1の自己位置をGNSS確率分布として求める機能を有している。
さらに、自己位置推定部35は、SLAM確率分布とGNSS確率分布とを合成することで、SLAM/GNSS確率分布を作成し、その確率がピークとなる座標を自律走行台車1の自己位置とする機能を有している(後述)。
The self-
Further, the self-
(5)自律走行台車の概略動作
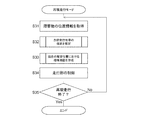
図2を用いて、自律走行台車1の概略動作を説明する。図2は、自律走行台車の動作の概略を示すフローチャートである。
ステップS1では、制御部7が、操作者によりモード選択が行われたか否かを判別する。具体的には、操作者による操作部9の操作により指示入力を受け付けた場合に、モード選択が行われたと判断される。
ステップS2では、制御部7は、選択されたモードが教示走行モードであるか、再現走行モードであるかを判断する。
(5) Schematic operation of the autonomous traveling vehicle The schematic operation of the
In step S1, the
In step S2, the
ステップS3では、制御部7は、再現走行モードを実行する。再現走行モードは、予め決められた走行経路を自律的に走行するモードであり、制御部7は、移動領域における自律走行台車1の位置を推定しながら、推定された自律走行台車1の位置と、走行スケジュールに示された位置情報との比較に基づいて、走行部3を制御する(後述)。
ステップS4では、制御部7は、教示走行モードを実行する。教示走行モードは、環境地図復元用データや走行スケジュールを取得するために実行される。制御部7は、移動領域における自律走行台車1の位置を推定しながら、後述する操作部9からの操作に基づいて走行部3を制御する。
In step S3, the
In step S4, the
ステップS5では、制御部7は、自律走行台車1の動作を終了するかどうかを判断する。具体的には、制御部7は、操作者による操作部9の操作により処理終了する旨の指示入力があった場合、リモコンにより処理終了する旨の指示入力信号を受信した場合、あるいは、教示走行モードにより作成された走行スケジュールを終了したと判断した場合などに、自律走行台車1の動作を終了すると判断する。
自律走行台車1の動作を終了すると判断した場合、プロセスは終了する。一方、自律走行台車1の動作を継続すると判断した場合、プロセスはステップS1に戻る。
In step S5, the
If it is determined that the operation of the
(6)自律走行台車の再現走行モード
図3を用いて、自律走行台車の再現走行モードを説明する。図3は、再現走行モードを実行中の自律走行台車の動作を示すフローチャートである。
ステップS31では、自律走行台車1の周囲に存在する障害物の位置情報を取得する。具体的には、距離センサ5が、レーザ光を照射しさらに障害物から反射した反射光を受信する。そして、障害物情報変換部21が、上記検出信号を障害物の位置情報(例えば、所定の座標上の座標値)に変換する。この障害物の位置情報を、現在の位置において取得された局所地図とする。
(6) Reproduction Driving Mode of Autonomous Driving Vehicle The reproduction driving mode of the autonomous driving vehicle will be described with reference to FIG. FIG. 3 is a flowchart showing the operation of the autonomous traveling vehicle during the reproduction traveling mode.
In step S31, the position information of the obstacles existing around the
ステップS32では、自己位置推定部35が、自律走行台車1の現在の位置を推定する(後述)。
In step S32, the self-
ステップS33では、地図作成部33が、走行スケジュールに示された次の目標到達点を上記の将来位置として、次の自己位置推定のための(現在の推定位置における)環境地図を作成して、記憶部27に記憶する。
In step S33, the
ステップS34では、決定した自己位置に基づいて走行部3が制御される。具体的には、SLAM処理部25から取得した現在の推定位置と、現在再現走行を行っている走行経路を示す走行スケジュールから取得した次の目標到達点との比較に基づいて作成された走行指令に従って、走行制御部29が、現在の推定位置から次の目標到達点まで移動するためのモータ15a、15bの制御量を算出し、モータ駆動部19a、19bに出力する。そのため、受信した制御量に基づいて、モータ駆動部19a、19bはそれぞれ、モータ15a、15bを駆動するための駆動信号を算出してモータ15a、15bに出力する。その結果、自律走行台車1は現在の推定位置から次の目標到達点に向かって走行する。
In step S34, the traveling
ステップS35では、制御部7は、再現走行モードが終了したかどうかを判断する。例えば、走行スケジュールに示された目標到達点のすべてを自律走行台車1が通過したと判断した場合に、再現走行モードが終了したと判断する。
再現走行モードを終了すると判断した場合、制御部7は、走行部3の制御を停止して、再現走行モードを終了する。一方、再現走行モードを継続すると判断した場合、プロセスはステップS31に戻る。
上記の再現走行モードを実行することにより、自律走行台車1は、記憶部27に記憶された予め決められた走行スケジュールを再現しながら自律的に移動できる。
In step S35, the
When it is determined that the reproduction traveling mode is terminated, the
By executing the above-mentioned reproduction traveling mode, the
図4を用いて、上記の自己位置推定動作(ステップS32)を具体的に説明する。図4は、自己位置推定動作のフローチャートである。
ステップS41では、自己位置推定部35が、距離センサ5のデータと移動環境の地図を用いて、SLAM確率分布として求める。
ステップS42では、自己位置推定部35が、GNSS受信機11のデータを用いて、GNSS確率分布を求める。
ステップS43では、自己位置推定部35が、SLAM確率分布にGNSS確率分布をミックスさせる割合(以下、「GNSS確率分布ミックス係数」という)を決定する(後述)。
The above self-position estimation operation (step S32) will be specifically described with reference to FIG. FIG. 4 is a flowchart of the self-position estimation operation.
In step S41, the self-
In step S42, the self-
In step S43, the self-
ステップS44では、自己位置推定部35が、GNSS確率分布ミックス係数を用いて、SLAM確率分布とGNSS確率分布とを合成することで、SLAM/GNSS確率分布を作成する。なお、得られたSLAM/GNSS確率分布は、次にSLAMによって自己位置推定する際の事前確率として用いられる。
ステップS45では、自己位置推定部35は、SLAM/GNSS確率分布のピーク位置を、移動環境における自律走行台車1の自己位置として決定する。
In step S44, the self-
In step S45, the self-
(7)GNSS確率分布係数を用いたSLAM確率分布とGNSS確率分布との合成
SLAM/GNSS確率分布の計算式は、以下の通りである。
{SLAM確率分布×(1.0−GNSS確率分布ミックス係数)}+(GNSS確率分布×GNSS確率分布ミックス係数)=SLAM/GNSS確率分布
GNSS確率分布ミックス係数は、0.0〜1.0の範囲で変更される。
(7) Synthesis of SLAM probability distribution and GNSS probability distribution using GNSS probability distribution coefficient The calculation formula of SLAM / GNSS probability distribution is as follows.
{SLAM probability distribution x (1.0-GNSS probability distribution mix coefficient)} + (GNSS probability distribution x GNSS probability distribution mix coefficient) = SLAM / GNSS probability distribution GNSS probability distribution mix coefficient is 0.0 to 1.0. It is changed in the range.
GNSS確率分布ミックス係数は、GNSS確率分布を強く反映させたい場合に大きく設定され、SLAM確率分布を強く反映させたい場合に小さく設定される。
前者の場合は、GNSS測位の精度が高い場合であり、例えば、自律走行台車1がオープンスカイ(屋外であって建物から離れた領域であって、屋根や樹木等の空を遮るものがない領域)を走行する場合である。
後者の場合は、GNSS測位の精度低い場合であり、例えば、自律走行台車1が建物内(地下を含む)、建屋周辺を走行する場合である。特に、建物内、屋根や樹木の下又は建物間では、GNSS測位が不可能である。
The GNSS probability distribution mix coefficient is set large when it is desired to strongly reflect the GNSS probability distribution, and is set small when it is desired to strongly reflect the SLAM probability distribution.
In the former case, the accuracy of GNSS positioning is high. For example, the
The latter case is a case where the accuracy of GNSS positioning is low, for example, a case where the
なお、GNSS確率分布ミックス係数を決定するためのデータとしては、例えば、距離センサ5のセンシング状況である検出量(つまり、検出データ数)が用いられる。その理由は、検出データ数は、例えば、屋内、屋外建屋周辺、オープンスカイの順番に少なくなるからである。
As the data for determining the GNSS probability distribution mix coefficient, for example, the detection amount (that is, the number of detected data) which is the sensing status of the
以下、3種類の状況におけるGNSS確率分布ミックス係数及びSLAM/GNSS確率分布のピーク座標の決定方法を説明する。
第1に、屋内では、距離センサ5のセンシング状況が良くつまり距離センサ5の検出データ数が多いので、GNSS確率分布ミックス係数がゼロ又は極めて小さく設定される。これは、屋内環境では距離センサ5の測距範囲内に物体が存在するのでSLAMによる位置判定の信頼性が高く、反対にGNSSによる測定の信頼性が低い又は測位不能だからである。この場合は、SLAM確率分布のピーク座標がそのままSLAM/GNSS確率分布のピーク座標となる。
第2に、オープンスカイ環境の場合、距離センサ5の検出データ数が無くなるので、GNSS確率分布ミックス係数は大きく(例えば、1に)設定される。これは、オープンスカイ環境では、GNSSによる測定の信頼性が高いからである。この結果、この場合は、GNSS確率分布のピーク座標がそのままSLAM/GNSS確率分布のピーク座標となる。
Hereinafter, a method for determining the GNSS probability distribution mix coefficient and the peak coordinates of the SLAM / GNSS probability distribution in three types of situations will be described.
First, indoors, the sensing condition of the
Secondly, in the case of an open sky environment, the number of detected data of the
第3に、屋外であっても建物等の障害物の周辺では、オープンスカイ環境に比べて、距離センサ5の検出データ数が多いので、GNSS確率分布ミックス係数は、より小さく設定される。これは、オープンスカイ環境に比べて、SLAMによる位置判定の信頼性が高く、反対にGNSSによる測定の信頼性が低い(例えば、人工衛星からの信号を検出できず測位が不安定になったり、不可能になったりする)からである。
以上の結果、屋内だけではなく、屋外であるが建物等の障害物に近い環境であってGNSS測位が上手く働かない場合には、その分をSLAMによる自己位置推定が補うことができる。その結果、自律走行台車1が屋内・屋外を問わず様々な環境で自己位置を認識することが可能となり、それにより走行範囲を拡大できる。
Thirdly, since the number of detection data of the
As a result of the above, when GNSS positioning does not work well in an environment close to an obstacle such as a building, not only indoors but also outdoors, the self-position estimation by SLAM can be supplemented. As a result, the
(8)実施例
図5を用いて、自律走行台車1が実際に屋外を走行する状況を説明する。図5は、自律走行台車の走行状況を示す模式的平面図である。
図5に示すように、自律走行台車1は、周囲に建物がないオープンスカイ環境である第1領域Aから、建物C及び建物Dの近辺の建屋周辺領域である第2領域Bに向かって走行する。なお、第1領域Aには、花壇EとテニスコートFがある。
(8) Example A situation in which the
As shown in FIG. 5, the
図6A〜図6Cを用いて、第1領域AでのSLAM/GNSS確率分布及び自己位置推定動作を説明する。図6Aは、SLAM確率分布を示すグラフである。図6Bは、GNSS確率分布を示すグラフである。図6Cは、SLAM/GNSS確率分布を示すグラフである。
図6Aに示すように、SLAM確率分布では、ピークは座標の「8」付近にある。
図6Bにあるように、GNSS確率分布では、ピークは座標の「5」付近にある。
The SLAM / GNSS probability distribution and the self-position estimation operation in the first region A will be described with reference to FIGS. 6A to 6C. FIG. 6A is a graph showing the SLAM probability distribution. FIG. 6B is a graph showing the GNSS probability distribution. FIG. 6C is a graph showing the SLAM / GNSS probability distribution.
As shown in FIG. 6A, in the SLAM probability distribution, the peak is near the coordinate "8".
As shown in FIG. 6B, in the GNSS probability distribution, the peak is near the coordinate "5".
図6Cに示すように、SLAM/GNSS確率分布では、ピークはGNSS確率分布と同様に座標の「5」付近になる。その理由は、第1領域AではGNSS確率分布ミックス係数が大きく設定されることで、GNSS確率分布が強めにSLAM/GNSS確率分布に反映されるからである。 As shown in FIG. 6C, in the SLAM / GNSS probability distribution, the peak is in the vicinity of the coordinate "5" as in the GNSS probability distribution. The reason is that the GNSS probability distribution mix coefficient is set large in the first region A, so that the GNSS probability distribution is strongly reflected in the SLAM / GNSS probability distribution.
図7A〜図7Cを用いて、第2領域BでのSLAM/GNSS確率分布及び自己位置推定動作を説明する。図7Aは、SLAM確率分布のグラフである。図7Bは、GNSS確率分布のグラフである。図7Cは、SLAM/GNSS確率分布のグラフである。
図7Aに示すように、SLAM確率分布では、ピークは座標の「8」付近にある。
図7Bにあるように、GNSS確率分布では、ピークは座標の「5」付近にある。
The SLAM / GNSS probability distribution and the self-position estimation operation in the second region B will be described with reference to FIGS. 7A to 7C. FIG. 7A is a graph of the SLAM probability distribution. FIG. 7B is a graph of the GNSS probability distribution. FIG. 7C is a graph of SLAM / GNSS probability distribution.
As shown in FIG. 7A, in the SLAM probability distribution, the peak is near the coordinate "8".
As shown in FIG. 7B, in the GNSS probability distribution, the peak is near the coordinate "5".
図7Cに示すように、SLAM/GNSS確率分布では、ピークはSLAM確率分布と同様に座標「8」付近になる。その理由は、第2領域Bでは、GNSS確率分布ミックス係数が小さく設定されることで、GNSS確率分布がSLAM/GNSS確率分布に弱めに又は全く反映されないからである。
この結果、SLAM/GNSS確率分布のピークが自律走行台車1の現在位置であると推定される。
As shown in FIG. 7C, in the SLAM / GNSS probability distribution, the peak is near the coordinate "8" as in the SLAM probability distribution. The reason is that in the second region B, the GNSS probability distribution mix coefficient is set small, so that the GNSS probability distribution is weakly or not reflected in the SLAM / GNSS probability distribution.
As a result, it is estimated that the peak of the SLAM / GNSS probability distribution is the current position of the
2.実施形態の説明
上記実施形態は下記のようにも説明できる。
制御部7(走行制御装置の一例)は、自律走行台車1(自律走行台車の一例)から周囲にある障害物までの距離を二次元的に又は三次元的に取得する距離センサ5(第1のセンサの一例)と、地上における自律走行台車1の絶対位置を取得するGNSS受信機11(第2のセンサの一例)と、走行部3(走行部の一例)とを含み、移動環境を計画的に又は無計画に自律的に移動する自律走行台車1に用いられる。
制御部7は、記憶部27と、I/Oポート31と、自己位置推定部35とを有している。
記憶部27(ストレージの一例)は、移動環境の地図を記憶する。
I/Oポート31(入出力装置の一例)は、距離センサ5及びGNSS受信機11のデータが入力され、且つ走行指令を走行部3に出力する。
2. Description of the Embodiment The above embodiment can also be described as follows.
The control unit 7 (an example of a travel control device) is a distance sensor 5 (first) that acquires the distance from the autonomous driving vehicle 1 (an example of the autonomous driving vehicle) to the surrounding obstacles two-dimensionally or three-dimensionally. (Example of a sensor), a GNSS receiver 11 (an example of a second sensor) that acquires the absolute position of the
The
The storage unit 27 (an example of storage) stores a map of the mobile environment.
The I / O port 31 (an example of an input / output device) receives data from the
自己位置推定部35(演算装置の一例)は、下記の動作を実行する。
◎距離センサ5のデータと移動環境の地図を用いて移動環境の地図上における自律走行台車1の自己位置をSLAM確率分布(第1の確率分布の一例)として求める。
◎GNSS受信機11のデータを用いて、自律走行台車1の自己位置をGNSS確率分布(第2の確率分布の一例)として求める。
◎SLAM確率分布とGNSS確率分布とを合成してSLAM/GNSS確率分布(第3の確率分布の一例)を作成する。
◎SLAM/GNSS確率部分布ピーク位置を、移動環境における自律走行台車1の自己位置として決定する。
◎決定した自己位置に基づいて走行指令を作成する。
The self-position estimation unit 35 (an example of an arithmetic unit) executes the following operations.
◎ Using the data of the
(1) Using the data of the
◎ The SLAM / GNSS probability distribution (an example of the third probability distribution) is created by synthesizing the SLAM probability distribution and the GNSS probability distribution.
◎ The SLAM / GNSS probability part distribution peak position is determined as the self-position of the
◎ Create a running command based on the determined self-position.
この場合、自律走行台車1は屋内及び屋外でシームレスに走行する。特に、SLAM/GNSS確率分布を作成し、そのピーク位置を自己位置として決定するので、走行環境に従って最も適切な自己位置推定が可能である。したがって、例えば屋内では、SLAM確率分布を重視することで、自己位置を正確に把握できる。また、第1領域A(屋外で近くに建物等の障害物がない領域の一例)では、GNSS確率分布を重視することで、自己位置を正確に把握できる。さらに、第2領域B(屋外で近くに建物等の障害物がある領域の一例)では、SLAM確率分布を重視することで自己位置を正確に把握できる。
In this case, the
3.他の実施形態
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、発明の要旨を逸脱しない範囲で種々の変更が可能である。特に、本明細書に書かれた複数の実施形態及び変形例は必要に応じて任意に組み合せ可能である。
前記実施形態では再現走行モードを中心に説明したが、本発明は教示走行モードにも適用可能である。
前記実施形態では距離センサの例としてLRFを挙げたが、距離データを得られるセンサであればよいので、例えばTOFカメラや超音波センサでもよい。
前記実施形態ではGNSS方式によって地上における自律走行台車の絶対位置を取得していたが、自律走行台車の絶対位置を取得する方法は他の方式でもよい。
3. 3. Other Embodiments Although one embodiment of the present invention has been described above, the present invention is not limited to the above-described embodiment, and various modifications can be made without departing from the gist of the invention. In particular, the plurality of embodiments and modifications described herein can be arbitrarily combined as needed.
In the above-described embodiment, the reproduction driving mode has been mainly described, but the present invention can also be applied to the teaching driving mode.
In the above embodiment, LRF is mentioned as an example of a distance sensor, but any sensor that can obtain distance data may be used, for example, a TOF camera or an ultrasonic sensor.
In the above embodiment, the absolute position of the autonomous traveling vehicle on the ground is acquired by the GNSS method, but the method of acquiring the absolute position of the autonomous traveling vehicle may be another method.
前記実施形態ではGNSSによる測位方式としては、RTK−GPS(Real Time Kinematics Global Positioning System)を用いていたが、GPS(Global Positioning System)、QZSS(Quasi−Zenith Satellite System:準天頂衛星システム)であってもよい。
前記実施形態ではGNSS確率分布ミックス係数を変更する基準となるデータとして距離センサ5の検出量を用いていたが、移動環境の地図上における自律走行台車1の推定自己位置、又はGNSS測位結果を用いていてもよい。この場合、正確な位置及び周囲の状況に応じて、SLAM確率分布及びGNSS確率分布をSLAM/GNSS確率分布に反映できる。
In the above embodiment, RTK-GPS (Real Time Kinetics Global Positioning System) was used as the positioning method by GNSS, but GPS (Global Positioning System), QZSS (Quasi-Zenith System) and QZSS (Quasi-Zenith System) You may.
In the above embodiment, the detection amount of the
本発明は、自律走行台車の走行制御装置及び自律走行台車に広く適用できる。 The present invention can be widely applied to a traveling control device for an autonomous traveling vehicle and an autonomous traveling vehicle.
1 :自律走行台車
3 :走行部
5 :距離センサ
7 :制御部
8 :座標
9 :操作部
10 :表示部
11 :GNSS受信機
13a :走行車輪
13b :走行車輪
15a :モータ
15b :モータ
17a :エンコーダ
17b :エンコーダ
19a :モータ駆動部
19b :モータ駆動部
21 :障害物情報変換部
23 :教示データ作成部
25 :SLAM処理部
27 :記憶部
29 :走行制御部
31 :I/Oポート
33 :地図作成部
35 :自己位置推定部
1: Autonomous traveling trolley 3: Traveling unit 5: Distance sensor 7: Control unit 8: Coordinates 9: Operation unit 10: Display unit 11:
Claims (6)
前記移動環境の地図を記憶するストレージと、
前記第1のセンサ及び前記第2のセンサのデータが入力され、且つ走行指令を前記走行部に出力する入出力装置と、
前記第1のセンサのデータと前記移動環境の地図を用いて前記移動環境の地図上における前記自律走行台車の自己位置を第1の確率分布として求め、前記第2のセンサのデータを用いて前記自律走行台車の自己位置を第2の確率分布として求め、前記第1の確率分布と前記第2の確率分布とを合成して第3の確率分布を作成し、前記第3の確率分布のピーク位置を前記移動環境における前記自律走行台車の自己位置として決定し、決定した自己位置に基づいて前記走行指令を作成する演算装置と、
を備え、
前記演算装置は、前記移動環境の地図上における前記自律走行台車の推定自己位置に応じて、前記第1の確率分布と前記第2の確率分布を合成する係数を変更する、自律走行台車の走行制御装置。 A first sensor that acquires the distance from the autonomous driving vehicle to the surrounding obstacles two-dimensionally or three-dimensionally, a second sensor that acquires the absolute position of the autonomous driving vehicle on the ground, and a traveling unit. In the driving control device of the autonomous driving vehicle that autonomously moves the moving environment systematically or unplannedly, including
Storage that stores the map of the mobile environment and
An input / output device for inputting data from the first sensor and the second sensor and outputting a travel command to the travel unit.
Using the data of the first sensor and the map of the moving environment, the self-position of the autonomous traveling vehicle on the map of the moving environment is obtained as a first probability distribution, and the data of the second sensor is used to obtain the self-position. It determined its own position of the autonomous traveling vehicle as a second probability distribution, wherein the first probability distribution second combines the probability distribution to create a third probability distribution, the third peak of the probability distribution An arithmetic device that determines the position as the self-position of the autonomous traveling vehicle in the moving environment and creates the traveling command based on the determined self-position.
Equipped with a,
The arithmetic unit changes the coefficient for synthesizing the first probability distribution and the second probability distribution according to the estimated self-position of the autonomous traveling vehicle on the map of the moving environment. Control device.
前記自律走行台車が屋外環境にある場合に前記第2の確率分布がより強く反映される係数が設定される、請求項1又は2に記載の自律走行台車の走行制御装置。 The autonomous driving trolley seamlessly travels between an indoor environment and an outdoor environment.
The travel control device for an autonomous driving vehicle according to claim 1 or 2 , wherein a coefficient is set in which the second probability distribution is more strongly reflected when the autonomous traveling vehicle is in an outdoor environment.
前記自律走行台車から周囲にある障害物までの距離を二次元的に又は三次元的に取得する第1のセンサと、
地上における前記自律走行台車の絶対位置を取得する第2のセンサと、
走行部と、
請求項1〜5のいずれかに記載の前記走行制御装置と、
を備えた自律走行台車。 An autonomous trolley that autonomously moves in a moving environment in a planned or unplanned manner.
A first sensor that two-dimensionally or three-dimensionally acquires the distance from the autonomous driving vehicle to surrounding obstacles, and
A second sensor that acquires the absolute position of the autonomous driving vehicle on the ground, and
With the running part
The traveling control device according to any one of claims 1 to 5.
Autonomous traveling trolley equipped with.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017109781A JP6962007B2 (en) | 2017-06-02 | 2017-06-02 | Driving control device for autonomous driving trolley, autonomous driving trolley |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017109781A JP6962007B2 (en) | 2017-06-02 | 2017-06-02 | Driving control device for autonomous driving trolley, autonomous driving trolley |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018206004A JP2018206004A (en) | 2018-12-27 |
| JP2018206004A5 JP2018206004A5 (en) | 2020-05-28 |
| JP6962007B2 true JP6962007B2 (en) | 2021-11-05 |
Family
ID=64957875
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017109781A Active JP6962007B2 (en) | 2017-06-02 | 2017-06-02 | Driving control device for autonomous driving trolley, autonomous driving trolley |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6962007B2 (en) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7275553B2 (en) * | 2018-12-10 | 2023-05-18 | ソニーグループ株式会社 | MOBILE BODY, MOBILE BODY CONTROL METHOD AND PROGRAM |
| JP6711555B1 (en) * | 2019-02-28 | 2020-06-17 | 三菱ロジスネクスト株式会社 | Transport system, area determination device, and area determination method |
| TWI711804B (en) * | 2019-05-15 | 2020-12-01 | 宜陞有限公司 | Vehicle navigation device for self-driving cars |
| TWI725611B (en) * | 2019-11-12 | 2021-04-21 | 亞慶股份有限公司 | Vehicle navigation switching device for golf course self-driving cars |
| JP7421396B2 (en) * | 2020-03-27 | 2024-01-24 | 株式会社Nttデータ | Autonomous flying vehicle and flight control method |
| US11541903B2 (en) | 2020-06-03 | 2023-01-03 | Waymo Llc | Autonomous driving with surfel maps |
| CN111665842B (en) * | 2020-06-09 | 2021-09-28 | 山东大学 | Indoor SLAM mapping method and system based on semantic information fusion |
| JP7558757B2 (en) | 2020-11-05 | 2024-10-01 | パナソニックホールディングス株式会社 | Self-location estimation device and mobile body |
| JP2022075256A (en) * | 2020-11-06 | 2022-05-18 | 株式会社豊田自動織機 | Parameter acquisition method and device for coordinate conversion and self-position estimation device |
| JP7555293B2 (en) | 2021-03-22 | 2024-09-24 | 株式会社クボタ | Autonomous Driving System |
| EP4481527A1 (en) | 2023-06-20 | 2024-12-25 | Ricoh Company, Ltd. | Mobile apparatus, method for determining position, and non-transitory recording medium |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10132588A (en) * | 1996-10-30 | 1998-05-22 | Hitachi Ltd | Position estimating device |
| JP4504326B2 (en) * | 2005-04-05 | 2010-07-14 | パナソニック株式会社 | High frequency amplifier circuit |
| JP2006343881A (en) * | 2005-06-07 | 2006-12-21 | Institute Of Physical & Chemical Research | Self-position estimation system and self-position estimation method |
| WO2008013568A2 (en) * | 2005-12-30 | 2008-01-31 | Irobot Corporation | Autonomous mobile robot |
| JP6079415B2 (en) * | 2013-05-01 | 2017-02-15 | 村田機械株式会社 | Autonomous mobile |
-
2017
- 2017-06-02 JP JP2017109781A patent/JP6962007B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018206004A (en) | 2018-12-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6962007B2 (en) | Driving control device for autonomous driving trolley, autonomous driving trolley | |
| EP3715785B1 (en) | Slam assisted ins | |
| CN107976999B (en) | Mobile robot and obstacle avoidance and path planning method and system thereof | |
| US20220155794A1 (en) | 3-d image system for vehicle control | |
| US9740209B2 (en) | Autonomous moving body | |
| US11656630B2 (en) | Autonomous map traversal with waypoint matching | |
| US6442476B1 (en) | Method of tracking and sensing position of objects | |
| Milanés et al. | Autonomous vehicle based in cooperative GPS and inertial systems | |
| US9142063B2 (en) | Positioning system utilizing enhanced perception-based localization | |
| KR100772912B1 (en) | Robot using absolute azimuth and map creation method using same | |
| US20090149990A1 (en) | Method, medium, and apparatus for performing path planning of mobile robot | |
| KR102322538B1 (en) | Navigation device for self-driving vehicle | |
| SE1451662A1 (en) | Improved navigation for a robotic work tool | |
| KR102373825B1 (en) | Vehicle navigaton switching device for golf course self-driving cars | |
| WO2014178273A1 (en) | Movement control device for autonomous moving body, autonomous moving body, and movement control method | |
| JP4061596B2 (en) | Movement control device, environment recognition device, and moving body control program | |
| RU2740229C1 (en) | Method of localizing and constructing navigation maps of mobile service robot | |
| JP2016080460A (en) | Moving body | |
| JP2003015739A (en) | External environment map, self-position identifying device and guide controller | |
| CN113566808A (en) | Navigation path planning method, device, equipment and readable storage medium | |
| US20160231744A1 (en) | Mobile body | |
| JP2009223757A (en) | Autonomous mobile body, control system, and self-position estimation method | |
| Calero et al. | Autonomous Wheeled Robot Platform Testbed for Navigation and Mapping Using Low-Cost Sensors | |
| Roth et al. | Application of robust, high-accuracy positioning for autonomous ground vehicles | |
| AU756108B2 (en) | Method of tracking and sensing position of objects |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200414 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200424 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210317 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210323 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210430 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210914 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210927 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6962007 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |