以下、この発明による位置指示器の実施形態を、図を参照しながら説明する。図1は、この発明の実施形態の位置指示器1の概念的構成およびその処理動作を概括的に説明するための図であり、位置指示器1が、静電容量式の位置検出システム2のセンサ入力面2a上に位置されている状態を示す図である。また、図2は、位置指示器1の機構的構成例を説明するための図で、図2(A)は、その一部縦断面図であり、図2(B)は、その外観の一部を示す図である。この実施形態では、位置指示器1は外観が棒状のスタイラス形状を有するものとして形成されている。
[実施形態の位置指示器の機械的構成例の説明]
この実施形態の位置指示器1は、棒状の筐体3を備える。この筐体3は、図2(A)に示すように、絶縁材料例えば合成樹脂からなる中空の円筒状形状の絶縁体部31により構成されている。そして、この実施形態では、筐体3の絶縁体部31の外表周面の少なくとも操作者が当該位置指示器1を把持する部分は、例えば金属からなる導電体部32で覆われている。
筐体3内には、図2(A)に示すように、プリント配線基板40と、バッテリー5と、筆圧検出ユニット9とが配設されている。筐体3の外表周面を覆う導電体部32は、図示は省略するが、このプリント配線基板40のアース導体に電気的に接続されている。
プリント配線基板40上には、図1及び図2(A)に示すように、制御手段の例を構成する信号送信制御回路41と、無線通信モジュール42と、押釦スイッチからなるサイドスイッチ43と、当該位置指示器1の識別情報(ID)を記憶するIDメモリ44と、互いに異なる周波数f1,f2の発振信号を出力する発振器45,46と、導電パターン47a〜47eなどの配線パターンなどの他、この例では、電源スイッチ48およびLED(Light Emitting Diode)49などが配置されている。なお、図2(A)では、導電パターン47a〜47eは、説明の簡略化のため模式的に一本の導体パターンとして示しているが、導電パターン47a〜47eは、必要に応じて、複数本の導体パターンからなる場合も勿論ある。
バッテリー5は、プリント配線基板40上に構成されている電子回路及び電子部品への電源の供給源である。筆圧検出ユニット9は、後述するように、この実施形態では、芯体を構成する中心電極7に印加される筆圧に応じた静電容量を呈する可変容量コンデンサの構成とされている。
無線通信モジュール42は、この発明の付加情報の送信部(第2の送信部)の例となる送信機能部と、位置検出システムからの信号を受信する受信部(第1の受信部)の例となる受信機能部を有するもので、この実施形態では、近距離無線通信規格のブルートゥース(登録商標)規格の無線通信モジュールの構成とされている。無線通信モジュール42は、信号送信制御回路41と接続されている。なお、この無線通信モジュール42としては、ブルートゥースに限られるものではなく、例えば赤外線通信によるものであってもよいし、あるいは、Wi−Fi(登録商標)規格の無線通信モジュールを用いてもよい。
サイドスイッチ43、IDメモリ44及び筆圧検出ユニット9は、それぞれ付加情報発生手段を構成する。サイドスイッチ43は、そのオンまたはオフの情報を、付加情報の一例として信号送信制御回路41に供給する。IDメモリ44は、信号送信制御回路41からの読出し要求に応じて、記憶している当該位置指示器1の識別情報(ID:Identification)を、付加情報の一例として、信号送信制御回路41に出力する。筆圧検出ユニット9により構成される可変容量コンデンサは、芯体を構成する中心電極7に印加される筆圧値に応じた静電容量変化を呈し、信号送信制御回路41は、その静電容量に基づいて、付加情報の一例としての筆圧情報を生成する。
発振器45及び46は、この実施形態の位置指示器1から送出する位置検出用信号を形成するための交流信号を発生し、その発生した交流信号を信号送信制御回路41に供給する。この実施形態では、発振器45は周波数f1の交流信号を発生し、発振器46は、周波数f1とは異なる周波数f2の交流信号を発生する。信号送信制御回路41は、発振器45及び発振器46に基づいて、異なる位置検出用信号を生成する。つまり、信号送信制御回路41は、発振器45及び発振器46と相まって、位置検出用信号を発生する手段を構成し、2個の発信部を構成する。そして、信号送信制御回路41は、生成した2種の位置検出用信号のいずれかを、位置指示器1から送出する位置検出用信号とする。なお、発振器45,46の代わりに、後述するアクティブ方式の複数種の構成タイプの位置指示器用のそれぞれ用の位置検出用信号を生成して発信する複数個の発信部を設け、信号送信制御回路41で選択制御するように構成してもよい。
そして、この実施形態では、バッテリー5は、筐体3内に、図1及び図2(A)に示すように収納されるように構成されており、プリント配線基板40上の信号送信制御回路41などの電子回路部の電源電圧は、このバッテリー5にて生成される。図2(A)において、端子52は、プリント配線基板40上の電源回路部に電気的に接続されている端子である。バッテリー5の正極側電極51は、この端子52に接触して電気的に接続されている。図示は省略するが、バッテリー5の負極側電極は、プリント配線基板40のアース導体に直接に接続され、あるいは筐体3の導電体部32を経由してプリント配線基板40のアース導体に接続されている弾性変位する端子に押圧接触するようにされている。
プリント配線基板40上に配置されている電源スイッチ48の操作子48aは、図2(B)に示すように、筐体3に設けられた開口部を介して、外部から操作可能に設けられている。使用者が、この操作子48aをスライド移動させることにより、電源スイッチ48をオン・オフさせることができる。なお、プリント配線基板40上には、電源スイッチ48がオンとされたときに、バッテリー5からの電圧から電源電圧を生成する電源回路部も形成されているが、図1及び図2では、説明の簡単のため省略した。
筐体3を構成する中空の円筒状形状の絶縁体部31の中心線方向の一方の端部側は、図2(A)に示すように、徐々に先細となるテーパー部33とされている。このテーパー部33の外周側には、例えば環状の導電金属からなる周辺電極6が取り付けられる。周辺電極6と筐体3の外周表面の導電体部32とは、両者の間に絶縁体部31が介在することにより、絶縁されている。
周辺電極6は、図1に模式的に示すように、位置検出システム2と静電結合することで、この実施形態では、位置検出システムからの信号の受信部(第2の受信部)を構成する。そして、この周辺電極6は、絶縁体部31を貫通するリード導体部材61により、プリント配線基板40の導体パターン47aに電気的に接続されている。この導体パターン47aは、この例では、信号送信制御回路41の入力端に接続されている。
また、この実施形態では、筐体3のテーパー部33の中空部から一端側が外部に突出するように、導電性を有する棒状体からなる中心電極7が配される。この中心電極7は、ペン形状の位置指示器1のペン先を構成する芯体となるものである。
中心電極7は、この実施形態においては、位置検出用信号を送出するための第1の送信部を構成するもので、その外部に突出する側とは反対側の端部は、プリント配線基板40に形成されている導電パターン47bに電気的に接続されるように構成されている。この導電パターン47bは、信号送信制御回路41の出力端に接続されている。なお、この実施形態では、位置指示器1は、位置検出用信号を送出しないパッシブ方式の位置指示器としても動作するもので、その場合には、中心電極7は、位置検出システム2の導体からの電荷を静電結合部を介して吸い上げる役割をすることになる。
周辺電極6は、この中心電極7の周囲に設けられる。周辺電極6と中心電極7との組み合わせは、前述したパッシブ方式の改良方式の位置指示器用である。この実施形態では、周辺電極6と中心電極7との間には、互いの電気的干渉を、効果的に防止するためのシールド部材8が設けられる。この実施形態のシールド部材8は、中心電極7を取り囲むように設けられ、これにより、シールド部材8が周辺電極6と中心電極7との間に介在して、周辺電極6と中心電極7との間の結合容量をできるだけ小さくするようにしている。
この芯体としての中心電極7は、その外部に突出する側とは反対側の端部が、筐体3の中空部内に配設されている筆圧検出ユニット9に嵌合されることで、位置指示器1の筐体3の中空部内に係止される。なお、後述するように、中心電極7は、引き抜くことで、筆圧検出ユニット9との嵌合が外れるように構成されている。すなわち、芯体としての中心電極7は、位置指示器1に対して交換可能である。
筆圧検出ユニット9は、この例では、芯体としての中心電極7に加えられる圧力(筆圧)に応じた静電容量を呈する可変容量コンデンサ(例えば特開2011‐186803号公報等参照)で構成されている。この筆圧検出ユニット9で構成される可変容量コンデンサの両端の電極は、図2(A)では、導電パターン47cにより、信号送信制御回路41に接続されている。
信号送信制御回路41は、無線通信モジュール42を通じて外部から受信した情報または周辺電極6を通じて受信した情報に基づいて、この実施形態の位置指示器1を、複数種の構成タイプ(モード)のいずれにするかを決定制御すると共に、その決定制御に基づいて、位置検出用信号の中心電極7を通じた送出の制御をし、さらに、付加情報の中心電極7または無線通信モジュール42を通じた送出の制御を行う。
次に、図3を参照して、中心電極7、シールド部材8及び筆圧検出ユニット9の部分の詳細な構成について説明する。図3は、中心電極7、シールド部材8及び筆圧検出ユニット9の部分の断面図を示すものである。
中心電極7は、図3に示すように、直径が例えば1.9mmに形成された導電性材料、例えば金属からなる芯体71を備え、この実施形態では、芯体71のペン先側の約半分が絶縁性材料からなる保護部材72により覆われている。保護部材72は、位置検出システム2のセンサ入力面2aを傷付けないようにすると共にセンサ入力面2aとの接触面積を大きくする役割と、シールド部材8及び周辺電極6に対する絶縁をより強固にする役割を有する。
図3に示すように、シールド部材8は、この実施形態では、導電性材料で構成されている筒状体81が、その外壁面及び内壁面を含む全表面を絶縁層82で覆われた構成とされている。
筆圧検出ユニット9は、中心電極7に印加される筆圧を、圧力伝達部材10を通じて受けて、静電容量が可変する可変容量コンデンサの構成とされている。図3に示すように、中心電極7と圧力伝達部材10とは結合されて、シールド部材8の筒状体81の中空部内に、摺動自在の状態で収容される。圧力伝達部材10は、中心電極7の芯体71の端部71bが嵌合される芯体嵌合部11と、筆圧検出ユニット9に嵌合する突出部12とを有する。
そして、圧力伝達部材10の凹部11a内には、図3に示すように、中心電極7と、プリント配線基板40の信号送信制御回路41との電気的な接続を行うための端子片13が配設されており、当該端子片13からの延長部13aがプリント配線基板40の導体パターンに接続されるリード電極14に接続されている。
中心電極7の芯体71は、その端部71aが、圧力伝達部材10の芯体嵌合部11の凹部11a内の端子片13に挿入(圧入)されることで、圧力伝達部材10と結合され、芯体71に印加される筆圧が圧力伝達部材10を介して後述する筆圧検出ユニット9に伝達されるようになっている。
なお、図3に示すように、筆圧検出ユニット9とシールド部材8との衝合部には、プリント配線基板40のアース導体に電気的に接続されている導電性金属板86が設けられており、シールド部材8の筒状体81の面が露出している端子部83と、この導電性金属板88と電気的に接続されている。これにより、中心電極7は、シールド部材8により電界シールドされている。
なお、圧力伝達部材10の芯体嵌合部11は、シールド部材8の筒状体81の中空部の段差部84に係合するため、中心電極7及び圧力伝達部材10が、ペン先側に抜け落ちないようになっている。また、シールド部材8の外周面の段差部85が、図示は省略する筐体3の絶縁体部31の中空部の内壁に形成されている段部に係合することで、シールド部材8が、筐体3の絶縁体部31の中空部内において、軸心方向に移動しないように構成されている。
筆圧検出ユニット9について、以下に説明する。この例の筆圧検出ユニット9は、例えば特許文献:特開2011−186803号公報に記載されている周知の構成の筆圧検出手段を使用したもので、中心電極7に印加される筆圧に応じて静電容量が変化する可変容量コンデンサを構成する。
この例の筆圧検出ユニット9は、図3に示すように、絶縁性材料、例えば樹脂からなるハウジング部材91内に、誘電体92と、導電部材93と、弾性部材94と、保持部材95と、端子部材96との複数個の部品が収納されて構成されている。端子部材96は、筆圧検出ユニット9を構成する可変容量コンデンサの第1の電極を構成する。また、導電部材93と弾性部材94とは電気的に接続されて、可変容量コンデンサの第2の電極を構成する。
この筆圧検出ユニット9においては、中心電極7に筆圧が印加されると、当該筆圧は圧力伝達部材10を介して筆圧検出ユニット9の保持部材95に伝達され、保持部材95は、印加された筆圧に応じて、導電部材93を誘電体92側に移動させる。すると、導電部材93と誘電体92との接触面積が印加された筆圧に応じて変化し、第1の電極と第2の電極との間に形成される可変容量コンデンサの静電容量が、印加された筆圧に応じて可変される。
[実施形態の位置指示器1の内部電子回路の構成例の説明]
この実施形態においては、位置指示器1と共に使用される位置検出システム2としては、前述したようにパッシブ方式、パッシブ方式の改良方式、アクティブ方式など、複数の構成タイプのものが存在する。この実施形態では、位置検出システム2は、位置指示器1の無線通信モジュール42と通信可能な無線通信モジュールを備える場合、当該無線通信モジュールにより、位置検出システムが動作可能な構成タイプを示すペン種情報を、位置指示器1に送信するようにする。位置指示器1は、無線通信モジュール42の受信機能(第1の受信部)により、当該位置検出システムからのペン種情報を受信し、当該受信したペン種情報に基づいて、いずれの構成タイプ(モード)の位置指示器とすべきかを決定し、その決定した構成タイプの位置指示器の構成となるように制御する。
位置検出システム2側からの送信信号を受けるパッシブ方式あるいはパッシブ方式の改良方式の構成タイプの位置指示器の場合には、位置指示器1は、周辺電極6(第2の受信部)を通じて、当該位置検出システムからの信号を受信することで、いずれの構成タイプの位置指示器とすべきかを決定し、その決定したタイプの位置指示器の構成となるように制御することができる。
この場合に、パッシブ方式とパッシブ方式の改良方式とでは、位置検出システムからの信号の周波数の違いや、信号内容の違い(拡散符号の違いや変調方式の違い等)があることから、位置指示器1は、それらの違いを判別し、その判別結果によりいずれの構成タイプの位置指示器とすべきかを決定する。この場合には、無線通信モジュールを通じて、位置検出システムから、構成タイプの情報が得られないときにも、いずれの構成タイプ(モード)の位置指示器とすべきかを判定することができる。
位置指示器1の信号送信制御回路41は、上述した、位置検出システム2から無線通信モジュール42を通じて受信した情報、あるいは、周辺電極6を通じて受信した信号、に基づく位置指示器1の構成タイプ(モード)の決定処理を行うと共に、位置指示器1を決定した構成タイプ(モード)となるように制御する処理も行う。
図4は、この実施形態の位置指示器1の筐体3内のプリント配線基板40上に形成されている電子回路の構成を示すブロック図であり、主として、信号送信制御回路41の内部詳細構成例を示す図である。
図4に示すように、信号送信制御回路41は、例えばIC(Integrated Circuit)からなる制御部410と、ペン種判断部411と、中心電極送信信号生成部412と、無線送信信号生成部413と、位置検出用信号選択用のスイッチ回路414と、帰還信号生成回路415と、パッシブ方式の位置指示器と、パッシブ方式の改良方式及びアクティブ方式の位置指示器とを切り替えるためのスイッチ回路416、417とを含んで構成されている。
制御部410には、筆圧検出ユニット9で構成される可変容量コンデンサが接続されており、制御部410は、筆圧検出ユニット9で構成される可変容量コンデンサの静電容量から、中心電極7に印加される圧力(筆圧値)を算出する。また、サイドスイッチ43のオン、オフの状態信号が制御部410に供給される。制御部410は、このサイドスイッチ43のオン、オフの状態信号から、サイドスイッチ43に関する付加情報であるサイドスイッチ情報を生成する。また、IDメモリ44が制御部410に接続されており、制御部410は、必要に応じてこのIDメモリ44から位置指示器1の識別情報(ID)を読み出して取得するようにする。なお、IDメモリ44は予め識別情報を記憶したものを位置指示器1に収納するようにしてもよいし、記憶IDメモリ44の記憶内容である識別情報を、例えば無線通信モジュール42を通じて受信される、位置検出システム2からのコマンドにより書き替えることができるように構成してもよい。
制御部410は、ペン種判断部411からのペン種判断結果に基づく情報に応じて、複数種の付加情報、この例では、筆圧情報、サイドスイッチ情報、識別情報のそれぞれについて、中心電極7から送出するか、無線通信モジュール42から無線送信するかを制御するようにする。
制御部410は、中心電極7を通じて送出する付加情報は、中心電極送信信号生成部412に供給し、無線通信モジュール42を通じて送出する付加情報は、無線送信信号生成部413に供給する。
中心電極送信信号生成部412は、中心電極7に接続されており、後述するように、送出すべき付加情報は、位置検出用信号と共に中心電極7を通じて位置検出システム2に送出するようにする。無線送信信号生成部413は、無線通信モジュール42の送信部421に接続されており、送出すべき付加情報は、この送信部421を通じて位置検出システム2に無線送信される。
中心電極送信信号生成部412には、スイッチ回路414の制御部410による切替選択に応じて、発振器45からの周波数f1の交流信号、発振器46からの周波数f2の交流信号が、送出すべき位置検出用信号を生成するための信号として供給されると共に、帰還信号生成回路415からの帰還信号が、送出すべき位置検出用信号として供給される。帰還信号生成回路415は、周辺電極6を通じて位置検出システム2から受信した信号を、この例では、増幅して信号増強し、更に位相反転するようにする。この帰還信号生成回路415の構成例及び処理例については、後で詳述する。制御部410は、ペン種判断部411からのペン種判断結果に基づく情報に基づいてスイッチ回路414の切替選択信号を生成する。
また、中心電極送信信号生成部412と中心電極7との接続部は、スイッチ回路416を通じて、筐体3の導電体部32に接続されている。また、周辺電極6は、スイッチ回路417を通じて筐体3の導電体部32に接続されている。そして、これらスイッチ回路416,417は、制御部410からのオン・オフ制御信号により切り替えられる。制御部410は、ペン種判断部411からのペン種判断結果に基づく情報に基づいてスイッチ回路416,417のオン・オフ制御信号を生成する。
ペン種判断部411は、ペン種テーブルメモリ4111と、判断処理部4112とで構成されている。ペン種判断部411の判断処理部4112には、無線通信モジュール42の受信部422で受信した位置検出システム2からの情報が供給されると共に、周辺電極6を通じて位置検出システム2から受信した信号が供給される。
ペン種テーブルメモリ4111には、位置指示器1の複数種の構成タイプと、それぞれの構成タイプの位置指示器において、位置検出用信号の送出の有無及び送出する位置検出用信号を生成するための発振器の周波数、また、付加情報を中心電極7から送出するか、無線通信モジュール42を通じて送信するかのペン種テーブル情報が記憶されている。このペン種テーブル情報は、予めペン種テーブルメモリ4111に記憶されていてもよいが、この例では、無線通信モジュール42を通じて、位置検出システム2からのコマンドにより書き込み及び書き替えができるように構成されている。
判断処理部4112は、無線通信モジュール42の受信部422で受信した位置検出システム2からの情報、あるいは、周辺電極6を通じて位置検出システム2のセンサ部から受信した信号を判別すると共に、ペン種テーブルメモリ4111のペン種テーブル情報を参照して、位置指示器1と共に使用しようとする位置検出システム2に適合する位置指示器の構成タイプを判断する。そして、その判断結果に基づいて、中心電極7からの信号送出の有無、中心電極7から送出する位置検出用信号及び付加情報が何であるかについての情報、無線通信モジュール42を通じて送信する付加情報が何であるかについての情報を生成して、その生成した情報を制御部410に供給する。
制御部410は、ペン種判断部411からの情報に基づいて、スイッチ回路414の切替選択信号及びスイッチ回路416,417のオン・オフ制御信号を生成して、それらのスイッチ回路414及び416,417に供給すると共に、中心電極送信信号生成部412に供給する付加情報、無線送信信号生成部413に供給する付加情報を決定して、それぞれ供給する。
図5は、ペン種判断部411のペン種テーブル情報の一例を示すものである。この図5の例は、構成タイプ1〜構成タイプ5(モード1〜モード5)の5種の位置指示器についてのテーブル情報である。ペン種判断部411は、位置指示器の構成タイプ(モード)を判定した後、このペン種テーブル情報を参照して、制御部410に供給する制御情報を生成する。以下に、この実施形態の位置指示器1において、各構成タイプ(モード)が、制御部410による制御により切替構成されることを説明する。
構成タイプ1(モード1)は、パッシブ方式の位置指示器であり、中心電極7からは信号は送信せず、付加情報は、全て無線通信モジュール42を通じて送信する。すなわち、位置指示器1の信号送信制御回路41において、ペン種判断部411でこの構成タイプ1(モード1)と判断すると、制御部410は、スイッチ回路416,417をオンとし、また、中心電極送信信号生成部412を非動作の状態とされる。スイッチ回路417は、オフであってもよい。そして、制御部410は、全ての付加情報を無線送信信号生成部413を通じて無線通信モジュール42の送信部421を通じて位置検出システム2に送信するように制御する。なお、識別情報は、付加情報として送信する必要がない場合もある。
構成タイプ2(モード2)は、パッシブ方式の改良方式の位置指示器である。ペン種判断部411でこの構成タイプ2(モード2)と判断された場合には、ペン種判断部411からの情報に基づいて、制御部410は、スイッチ回路416,417はオフとし、スイッチ回路414は、帰還信号生成回路415からの信号を選択する状態に切り替える。そして、付加情報は、全て制御部410から無線送信信号生成部413を通じて無線通信モジュール42の送信部421を通じて位置検出システム2に送信するように制御する。なお、識別情報は、付加情報として送信する必要がない場合もある。
構成タイプ3(モード3)は、アクティブ方式の位置指示器の第1のタイプである。ペン種判断部411でこの構成タイプ3(モード3)と判断された場合には、ペン種判断部411からの情報に基づいて、制御部410は、スイッチ回路416はオフ、スイッチ回路417はオンとし、スイッチ回路414は、この例では、周波数f1の発振器45からの交流信号を選択する状態に切り替える。そして、付加情報は、全て制御部410から無線送信信号生成部413を通じて無線通信モジュール42の送信部421を通じて位置検出システム2に送信するように制御する。なお、識別情報は、付加情報として送信する必要がない場合もある。
構成タイプ4(モード4)は、アクティブ方式の位置指示器の第2のタイプである。ペン種判断部411でこの構成タイプ4(モード4)と判断された場合には、ペン種判断部411からの情報に基づいて、制御部410は、スイッチ回路416はオフ、スイッチ回路417はオンとし、スイッチ回路414は、この例では、周波数f2の発振器46からの交流信号を選択する状態に切り替える。そして、付加情報のうち筆圧情報とサイドスイッチ情報とは中心電極7から位置検出用信号と共に送出され、識別情報IDは、無線送信信号生成部413を通じて無線通信モジュール42の送信部421を通じて位置検出システム2に送信するように制御する。
構成タイプ5(モード5)は、アクティブ方式の位置指示器の第2のタイプである。ペン種判断部411でこの構成タイプ5(モード5)と判断された場合には、ペン種判断部411からの情報に基づいて、制御部410は、スイッチ回路416はオフ、スイッチ回路417はオンとし、スイッチ回路414は、この例では、周波数f2の発振器46からの交流信号を選択する状態に切り替える。そして、付加情報の全ては中心電極7から位置検出用信号と共に送出するように制御する。
以上のようにして、信号送信制御回路41は、無線通信モジュール42の受信部422及び周辺電極6を通じて位置検出システム2のセンサ部から受信した情報及び信号に基づいて、位置指示器の構成タイプを判断して、位置指示器1を、判断した構成タイプの位置指示器の構成とするようにする。したがって、この実施形態の位置指示器1は、種々の方式の位置検出システム2に対応した種々の構成タイプの位置指示器を、自動的に構成して、使用することができる。つまり、種々の方式の複数の位置検出システム2に対して、この実施形態の位置指示器1のみで、位置指示入力することができる。このため、種々の方式の複数の位置検出システム2にそれぞれ毎に別々の位置指示器を用意する必要がなく、非常に便利であると共に、使用者にとって、コスト的な負担も軽減されることになる。
なお、無線通信モジュール42を通じて受信する位置検出システム2からのペン種情報としては、構成タイプ1〜5のそれぞれを直接的に識別する構成タイプの情報とする場合に限られるものではなく、例えば、ペン種テーブル情報の、それぞれの構成タイプ1〜5の番号や、ペン種テーブルメモリ4111の各構成タイプのアドレスなどを間接的に示す情報であってもよい。
なお、図4において、ペン種判断部411の判断処理部4112、中心電極送信信号生成部412、無線送信信号生成部413の各処理機能は、制御部410がソフトウエア処理機能手段として構成することも可能である。帰還信号生成回路415も同様である。
[信号送信制御回路41における処理動作例]
次に、電源スイッチ48がオンとされた後における信号送信制御回路41が実行する処理動作例を、図6及び図7のフローチャートを参照しながら説明する。
信号送信制御回路41では、まず、無線通信モジュール42の受信部422で情報を受信したか否か判別し(ステップS1)、受信したと判別したときには、受信情報はペン種情報であるか否か判別する(ステップS2)。このステップS2で、受信情報はペン種情報であると判別したときには、信号送信制御回路41は、当該受信したペン種情報に基づいて位置指示器の構成タイプ(ペン種)を判断し、ペン種テーブルメモリ4111を参照して、中心電極7及び無線通信モジュール42の送信部421から送信する信号を決定する(ステップS3)。この決定には、前述したように、中心電極7から位置検出用信号を送信するか否かの決定も含まれる。
ステップS3の次には、信号送信制御回路41は、中心電極7及び無線通信モジュール42の送信部421を通じてのステップS3で判断された構成タイプに応じた信号送出を実行する(ステップS4)。
そして、信号送信制御回路41は、無線通信モジュール42の受信部422を通じた位置検出システム2からの情報を、受信できなくなったか否か判別し(ステップS5)、受信できなくなってはいないと判別したときには、処理をステップS4に戻して、判断した構成タイプに応じた信号送信を続行する。
ステップS5で、無線通信モジュール42の受信部422を通じた位置検出システム2からの情報を、受信できなくなったと判別したときには、信号送信制御回路41は、受信できなくなってから所定時間以上経過したか否か判別する(ステップS6)。このステップS6で、所定時間以上経過してはいないと判別したときには、信号送信制御回路41は、処理をステップS4に戻して、判断した構成タイプに応じた信号送信を続行する。
ステップS6で、所定時間以上経過したと判別したときには、信号送信制御回路41は、中心電極7及び無線通信モジュール42の送信部421からの信号送出を休止し、位置指示器1をスリープ状態にする(ステップS7)。このスリープ状態においては、できるだけバッテリー5の消耗を軽減させて省電力化を図るために、無線通信モジュール42の受信部422、信号送信制御回路41の制御部410、ペン種判断部411への電源の供給は維持するも、その他の部分への無駄な電圧供給を停止させるようにする。
そして、このステップS7の次には、信号送信制御回路41は、処理をステップS1に戻し、上述したステップS1以降の処理を繰り返す。
ステップS1で無線通信モジュール42の受信部422で情報を受信してはいないと判別したとき、また、ステップS2で、受信情報はペン種情報ではないと判別したときには、信号送信制御回路41は、周辺電極6を通じて信号を受信したか否か判別する(図7のステップS11)。このステップS11で、周辺電極6を通じて信号を受信してはいないと判別したときには、信号送信制御回路41は、スイッチ回路416をオンとして、中心電極7を導電体部32を通じてプリント配線基板40のアース導体(グランド)に接続するようにして、構成タイプ1の状態とする(ステップS18)。そして、このステップS18の次には、信号送信制御回路41は、処理を図6のステップS1に戻し、このステップS1以降の処理を繰り返す。
そして、ステップS11で、周辺電極6を通じて信号を受信したと判別したときには、受信信号からペン種の判断は可能であるか否か判別する(ステップS12)。このステップS12で、ペン種の判断は可能ではないと判別したときには、信号送信制御回路41は、スイッチ回路416をオンとして、中心電極7を導電体部32を通じてプリント配線基板40のアース導体(グランド)に接続するようにして、構成タイプ1の状態とする(ステップS18)。そして、このステップS18の次には、信号送信制御回路41は、処理を図6のステップS1に戻し、このステップS1以降の処理を繰り返す。
ステップS12で、ペン種の判断は可能であると判別したときには、信号送信制御回路41は、当該受信した信号に基づいて位置指示器の構成タイプ(ペン種)を判断し、ペン種テーブル4111を参照して、中心電極7及び無線通信モジュール42の送信部421から送信する信号を決定する(ステップS13)。この決定には、前述したように、中心電極7から位置検出用信号を送信するか否かの決定も含まれる。
ステップS13の次には、信号送信制御回路41は、中心電極7及び無線通信モジュール42の送信部421を通じてのステップS13で判断された構成タイプに応じた信号送出を実行する(ステップS14)。
そして、信号送信制御回路41は、周辺電極6を通じた信号の受信ができなくなったか否か判別し(ステップS15)、受信ができなくなってはいないと判別したときには、処理をステップS14に戻して、判断した構成タイプに応じた信号送信を続行する。
ステップS15で、周辺電極6を通じた信号の受信ができなくなったと判別したときには、信号送信制御回路41は、受信できなくなってから所定時間以上経過したか否か判別する(ステップS16)。このステップS16で、所定時間以上経過してはいないと判別したときには、信号送信制御回路41は、処理をステップS14に戻して、判断した構成タイプに応じた信号送信を続行する。
ステップS16で、所定時間以上経過したと判別したときには、信号送信制御回路41は、中心電極7及び無線通信モジュール42の送信部421からの信号送出を休止し、位置指示器1をスリープ状態にする(ステップS17)。そして、このステップS17の次には、信号送信制御回路41は、処理をステップS1に戻し、上述したステップS1以降の処理を繰り返す。
[各種の構成タイプの位置指示器と、対応する位置検出システムの動作説明]
<構成タイプ2の位置指示器1Aと、対応する位置検出システム2A>
図8は、構成タイプ2の位置指示器1Aの主要部の回路例を示す図であり、特に、帰還信号生成回路415の回路構成例と、上記では省略した電源回路部50の回路構成例を示したものである。
電源回路部50は、DC/DCコンバータ501を備え、バッテリー5の電圧から電源電圧+Vccを生成して、信号送信制御回路41やその他に供給する。
そして、電源回路部50においては、DC/DCコンバータ501とバッテリー5との間に電源スイッチ48が設けられている。また、DC/DCコンバータ501の出力端とアース導体との間には、抵抗502およびLED49の直列回路が接続されている。さらに、DC/DCコンバータ501の出力端は抵抗503および抵抗504の直列接続を通じてアース導体に接続され、抵抗503および抵抗504の接続点から基準電圧Vref(=Vcc/2)が出力される。
帰還信号生成回路415は、この例では信号増強処理回路として構成されるもので、センスアンプ510と、信号増幅率可変回路520と、トランス530とからなる。
この例では、センスアンプ510は、オペアンプ511と、このオペアンプ511の反転入力端子と出力端子との間に接続されるコンデンサ512とからなる。オペアンプ511の反転入力端子は、周辺電極6に接続されている接続端子513に接続されている。また、オペアンプ511の非反転入力端子には、前述した基準電圧Vrefが供給される。
位置指示器1Aが位置検出システム2A上にあるときには、図1に示すように、位置指示器1Aの周辺電極6と位置検出システム2Aとは、静電容量C1を介して結合している。後述するように、位置検出システム2Aには、交流信号が流れているので、この交流信号が静電容量C1および周辺電極6を介して電流信号として接続端子513に供給され、センスアンプ510に入力される。コンデンサ512は、静電容量C1を介して入力される電流信号を検出するためのものである。
そして、センスアンプ510は、接続端子513を通じて電流信号として入力された交流信号を位相反転して、信号増幅率可変回路520に出力する。
信号増幅率可変回路520は、オペアンプ521と、当該オペアンプ521の反転入力端子と出力端子との間に接続される可変抵抗器522とからなる。この可変抵抗器522の抵抗値を可変設定することにより、この信号増幅率可変回路520の増幅率が可変設定され、その結果として位置指示器1Aの信号検出感度が制御される。
この信号増幅率可変回路520で増幅された交流信号は、トランス530の一次巻線530aに供給される。このトランス530の一次巻線530aの巻線数n1と、二次巻線530bの巻線数n2との比は、例えば、n1:n2=1:10のように二次巻線530b側の巻線数が大きく(n1<n2)設定されている。したがって、トランス530の二次巻線530b側には、信号増幅率可変回路520の出力信号の振幅が巻線数比に応じて逓倍されて、大振幅とされた交流信号(電圧信号)が得られる。
トランス530の二次巻線530bの一端は、シールド部材8によりシールドされた中心電極7の棒状導体からなる芯体71に接続されている接続端子523に接続され、トランス530の二次巻線530bの他端は、プリント配線基板40のアース導体に接続される。したがって、帰還信号生成回路415により大振幅の交流信号電圧とされた出力信号は、接続端子523を通じて中心電極7に供給される。
位置指示器1Aが位置検出システム2A上にあるときには、位置指示器1Aの中心電極7と位置検出システム2Aとは静電容量を介して結合されているため、位置指示器1Aの中心電極7を介して位置指示器1Aから位置検出システム2Aに交流信号が帰還される。
次に、この例の位置検出システム2Aについて、図9を参照して説明する。この例の位置検出システム2Aは、センサ電極が入力電極と出力電極から構成されており、位置指示器1Aが接触したタッチポイントの結合容量の変化を検出する相互容量方式の位置検出システムの構成である。
図9に示すように、この例の位置検出システム2Aは、センサ部20Aと、送信部21と、受信部22と、無線通信部25と、制御部220Aを備えている。センサ部20Aは、センサ入力面の横方向(X軸方向)に延伸する直線状の複数個、この例ではm個の送信導体23Y1,23Y2,・・・,23Ym(mは1以上の整数)と、この送信導体23Y1〜23Ymと直交する、センサ入力面の縦方向(Y軸方向)に延伸する複数個、この例ではn個の受信導体24X1,24X2,・・・,24Xn(nは1以上の整数)とを備える。複数個の送信導体23Y1〜23YmはY軸方向に等間隔に配置され、送信部21に接続されている。また、複数個の受信導体24X1〜24XnはX軸方向に等間隔に配置され、受信部22に接続されている。
なお、この明細書の以下の説明において、送信導体23Y1〜23Ym及び受信導体24X1〜24Xnについて、いずれであるかを区別する必要のないときには、それぞれ送信導体23Y及び受信導体24Xと称することにする。
複数個の送信導体23Yと複数個の受信導体24Xとは、所定の間隔を隔てて配置され、互いに直交した配置関係を備えて、複数個の交点(クロスポイント)を形成する。そして、各クロスポイントでは、送信導体23Yと受信導体24Xとは、所定の静電容量を介して結合していると見なせる。
送信部21は、制御部220の制御に基づいて、送信導体23Yに所定の交流信号を供給する。この場合、送信部21は、同一の交流信号を複数個の送信導体23Y1,23Y2,・・・,23Ymに、順次に1本ずつ切り替えながら供給してもよいし、互いに異なる複数個の交流信号を複数個の送信導体23Y1,23Y2,・・・,23Ymに同時に供給するようにしても良い。また、複数個の送信導体23Y1,23Y2,・・・,23Ymを複数個のグループに分け、グループ毎に異なる交流信号を用いるようにしても良い。
受信部22は、制御部220の制御に基づいて、受信導体24X1,24X2,・・・,24Xnのそれぞれに、送信導体23Yに供給された交流信号が前記所定の静電容量を介して伝達される信号成分を検出する。送信導体23Yと受信導体24Xとの間の結合静電容量が全クロスポイントにおいて等しいとすれば、位置指示器1が、センサ部20上に存在していないときには、センサ部20の全ての受信導体24X1,24X2,・・・,24Xnからは所定レベルの受信信号が受信部22において検出される。
これに対して、位置指示器1Aがセンサ部20Aに接触すると、その接触位置のクロスポイントを構成する送信導体23Yと受信導体24X、および当該位置指示器1Aとは静電容量を通じて結合する。すなわち、当該位置指示器1Aによって静電容量が変化することになり、位置指示器1Aが存在するクロスポイントの受信導体24Xから得られる受信信号レベルが他のクロスポイントの受信信号レベルに比較して変化することとなる。
受信部22は、複数の受信導体24X1,24X2,・・・,24Xnのうち、その受信信号のレベルの変化があった受信導体24Xを検知することで、位置指示器1Aによる指示位置を検出する。そして、図示を省略した位置検出システム2の制御部は、送信部21から交流信号を供給している送信導体23Yと、受信部22で受信信号レベルの変化のあった受信導体24Xとを検出することにより、位置指示器1Aが接触しているクロスポイントを検出する。
位置指示器1Aではなく、指がセンサ部20上に接近または接触したときにも、位置検出システム2は、同様の原理により、その指が接近または接触したクロスポイントを検出する。その場合、送信導体23Yに供給された交流信号の一部が指を通じ、また、使用者の人体を通じてグラウンドに流れる。そのため、指が存在するクロスポイントを構成する受信導体24Xの受信信号レベルが変化する。受信部22は、この受信信号レベルの変化を検出することにより、指が存在するクロスポイントを構成する受信導体24Xを検出する。
構成タイプ1の位置指示器の場合には、指の位置検出の原理と同様にして、位置検出システム2Aは、センサ部20Aにおける指示位置の検出を行うことができる。しかし、構成タイプ1の位置指示器の場合には、指の場合のように位置検出システム2Aとの間の接触面積が大きくないため、結合容量が小さく、位置検出システム2Aは検出感度が低い。このため、構成タイプ1の位置指示器に対応する位置検出システムは、位置指示器に送信する交流信号として拡散符号を用いて、送信信号と受信信号の相関を取ることで位置指示器の指示位置を検出するなどして、検出感度の低下を補っている。
これに対して、この構成タイプ2の位置指示器1A及び位置検出システム2Aの場合には、拡散符号などを用いなくても、位置指示器1Aと位置検出システム2Aとの親和性が高く、しかも汎用性が高く、更には入力信号と出力信号との間で所定の波形相関性が確保されて、高感度にセンサ部20A上における位置検出が可能となる。
すなわち、位置検出システム2Aのセンサ部20A上に、位置指示器1Aを接近または接触させた場合、送信導体23Yに供給された交流信号は、図1に示したように静電容量C1を介し、また、周辺電極6を介して、電流信号として接続端子513を通じて帰還信号生成回路415に入力される。
帰還信号生成回路415に入力された交流信号(電流信号)は、センスアンプ510で位相反転された後、信号増幅率可変回路520において増幅されるとともに、トランス530により昇圧(逓倍)されて信号増強されて、電圧信号として接続端子523を通じて中心電極7に供給される。すなわち、周辺電極6を介してセンサ部20Aから帰還信号生成回路415に入力された交流信号は、帰還信号生成回路415において、逆相とされ、また大振幅の信号とされて中心電極7を通じて、センサ部20Aに帰還される。
この場合に、位置指示器1Aの中心電極7から位置検出システム2Aのセンサ部20Aに帰還される交流信号は、送信導体23Yに供給される交流信号とは逆相の増強された信号であるので、位置指示器1Aは、受信導体24Xの受信信号における交流信号の変化を、より増大させるように機能する。このため、位置検出システム2Aは、位置指示器1Aの接触位置を高感度で検出することが可能となる。なお、位置指示器1Aのアース導体が人体と接続されることで検出動作が一層安定化される。すなわち、この実施形態では、位置指示器1Aの筐体3は、プリント配線基板40のアース導体に接続されている導電体部32で覆われている。このため、位置検出システム2Aにおいて送信導体23Yに供給された交流信号は、位置指示器1Aを通じ、使用者の人体を通じてグランドに流れることで、信号検出動作の一層の安定化を図ることができる。
また、位置検出システム2Aのセンサ部20Aの送信導体23Yでの電圧をVとし、この実施形態の位置指示器1Aの中心電極7の電圧をeとし、周辺電極6と中心電極7との間の静電容量をC2(図1参照)とすると、
e≦C1/C2・V
なる関係がある。このため、周辺電極6と中心電極7との間の静電容量C2は、できるだけ小さい方が、中心電極7の電位eを高くするのに有利である。
このために、この実施形態の位置指示器1においては、周辺電極6と中心電極7との間にはシールド部材8を介在させることで、両者の結合をできるだけ小さくするようにしている。したがって、この実施形態の位置指示器1では、シールド部材8を介在させることによって、周辺電極6と中心電極7との間の静電容量C2は小さくなり、電圧eを大きくすることができ、効率よく感度を高めることができる。
上述した実施形態の位置指示器1Aは、周辺電極6で、位置検出システム2Aからの交流信号を受信し、中心電極7から、信号増強した出力交流信号を位置検出システム2Aに帰還させる構成である。しかし、位置検出システム2Aからの交流信号を受信するための電極を中心電極7とし、信号増強した交流信号を位置検出システム2に帰還させるための電極を周辺電極6としても良い。
なお、図9に示すように、この構成タイプ2の位置指示器1Aは、筆圧情報、サイドスイッチ情報及び識別情報は、無線通信モジュール42から位置検出システム2Aの無線通信部25に無線送信されるものである。無線通信部25で受信された筆圧情報、サイドスイッチ情報及び識別情報は、制御回路220Aに供給され、検出された位置情報と共に、例えばホストコンピュータなどに送信される。構成タイプ1の位置指示器からの付加情報も同様にして、無線通信モジュール42から位置検出システムに送信される。
<構成タイプ3の位置指示器1Bと、対応する位置検出システム2B>
図10は、構成タイプ3の位置指示器1Bと、対応する位置検出システム2Bとの主要部の回路例を示す図である。構成タイプ3の位置指示器1Bは、位置検出用信号として周波数f1の交流信号を送出すると共に、付加情報である筆圧情報、サイドスイッチ情報及び識別情報は、全て無線通信モジュール42から位置検出システム2Bの無線通信部25Bに送出する。
位置検出システム2Bは、図10に示すように、センサ部20Bと、このセンサ部20Bに接続されるペン指示検出回路26Bと、無線通信部25Bとで構成されている。
センサ部20Bは、下層側から順に、第1の導体群211、絶縁層(図示は省略)、第2の導体群212を積層して形成されたものである。第1の導体群211は、横方向(X軸方向)に延在した複数の第1の導体211Y1、211Y2、…、211Ym(mは1以上の整数)を互いに所定間隔離して並列に、Y軸方向に配置したものである。
また、第2の導体群212は、第1の導体211Y1、211Y2、…、211Ymの延在方向に対して交差する方向、この例では直交する縦方向(Y軸方向)に延在した複数の第2の導体212X1、212X2、…、212Xn(nは1以上の整数)を互いに所定間隔離して並列に、X軸方向に配置したものである。
なお、以下の説明において、第1の導体211Y1、211Y2、…、211Ymについて、それぞれの導体を区別する必要がないときには、その導体を、第1の導体211Yと称する。同様に、第2の導体212X1、212X2、…、212Xnについて、それぞれの導体を区別する必要がないときには、その導体を、第2の導体212Xと称することとする。
ペン指示検出回路26Bは、センサ部20Bとの入出力インターフェースとされる選択回路221と、増幅回路222と、バンドパスフィルタ223と、検波回路224と、サンプルホールド回路225と、AD(Analog to Digital)変換回路226と、制御回路220Bとからなる。
選択回路221は、制御回路220Bからの制御信号に基づいて、第1の導体群211Yおよび第2の導体群212Xの中からそれぞれ1本の導体を選択する。選択回路221により選択された導体は増幅回路222に接続され、位置指示器1Bからの信号が、選択された導体により検出されて増幅回路222により増幅される。この増幅回路222の出力はバンドパスフィルタ223Bに供給されて、位置指示器1Bから送信される信号の周波数f1の成分のみが抽出される。
バンドパスフィルタ223Bの出力信号は検波回路224によって検波される。この検波回路224の出力信号はサンプルホールド回路225に供給されて、制御回路220Bからのサンプリング信号により、所定のタイミングでサンプルホールドされた後、AD変換回路226によってデジタル値に変換される。AD変換回路226からのデジタルデータは制御回路220Bによって読み取られ、処理される。
制御回路220Bは、内部のROMに格納されたプログラムによって、サンプルホールド回路225、AD変換回路226、および選択回路221に、それぞれ制御信号を送出するように動作する。また、制御回路220Bは、AD変換回路226からのデジタルデータから、位置指示器1Bによって指示されたセンサ部20B上の位置座標を算出する。
図11は、この構成タイプ3の位置指示器1Bから、対応する位置検出システム2Bに送信される信号を説明するためのタイミングチャートである。上述したように、この構成タイプ3の位置指示器1Bからは、例えば周波数f1の交流信号に基づく信号が、連続的に、位置検出用信号として中心電極7を通じて送出される。
しかし、この例のこの構成タイプ3の位置指示器1Bは、この実施形態の位置指示器1が位置検出用信号として周波数f1の交流信号と、周波数f2の交流信号とを送出することが可能な構成を有している利点を利用して、位置検出用信号と同じ周波数のノイズが存在するときには、位置検出用信号の周波数を切り替えることができるようにしている。
すなわち、この実施形態の構成タイプ3の位置指示器1Bにおいては、図11(A)に示すように、位置検出用信号は、所定期間長Taの連続送信期間と所定期間長Tbの休止期間とを1周期として、当該1周期を繰り返すようなものとされる。
そして、位置検出システム2Bの制御回路220Bでは、図11(B)に示すように、所定期間長Tbの休止期間を、ノイズの有無を検出するためのウインドウ区間として、当該ウインドウ区間において、位置検出用信号と同じ周波数のノイズが存在するか否かを検出するようにする。そして、ウインドウ区間において、位置検出用信号と同じ周波数のノイズが存在することを検出したときには、位置検出システム2Bの制御回路220Bは、無線通信部25Bを通じて、その旨を位置指示器1Bに通知する。
位置指示器1Bの無線通信モジュール42の受信部422は、位置検出システム2Bからのこの通知を受けると、信号送信制御回路41の制御部410に転送する。信号送信制御回路41の制御部410は、この通知に従い、スイッチ回路414を切り替え制御して、周波数f1の発振器45から周波数f2の発振器46を選択する状態に切り替える。なお、前記位置検出システム2Bからの通知を受けたときの位置指示器1Bからの位置検出用信号が、周波数f2の発振器46からの信号に基づくものであった場合には、前記位置検出システム2Bからの通知により、制御部410は、スイッチ回路414を切り替え制御して、周波数f2の発振器46から周波数f1の発振器45を選択する状態に切り替える。
例えば、図11(A)に示すように、位置指示器1Bからの位置検出用信号が周波数f1の信号であったときに、図11(C)に示すように、同じ周波数f1のノイズNRが存在していた場合には、位置検出システム2Bの制御回路220Bは、図11(B)に示すウインドウ区間において、当該ノイズNRを検出し、その旨を無線通信部25Bを通じて、位置指示器1Bに送る。
位置指示器1Bでは、制御部410が、この位置検出システム2Bからの通知を無線通信モジュール42の受信部422を通じて受けて、位置検出用信号の周波数を、図11(D)に示すように、周波数f1から周波数f2に切り替えるようにスイッチ回路414を切り替え制御する。したがって、位置検出用信号の周波数と同じ周波数のノイズが位置検出システム2Bの近辺に存在したとしても、位置検出用信号の周波数の切替により、当該ノイズの影響を受けることが無いようにすることができる。
なお、位置検出システム2Bにおいては、周波数f1と周波数f2の位置検出用信号の両方に対応することができるように、バンドパスフィルタ223Bは、周波数f1を中心周波数とする通過周波数帯域とする状態と、周波数f2を中心周波数とする通過周波数帯域とする状態とを備えるものとされ、制御回路220Bからの制御により、いずれの通過周波数帯域を用いるかが切り替えられるように構成されている。
<構成タイプ4の位置指示器1Cと、対応する位置検出システム2C>
図12は、構成タイプ4の位置指示器1Cと、対応する位置検出システム2Cとの主要部の回路例を示す図である。構成タイプ4の位置指示器1Cは、位置検出用信号として周波数f2の交流信号を送出すると共に、位置指示器として重要な付加情報の例である筆圧情報及びサイドスイッチ情報は、位置検出用信号と共に、中心電極7を通じて位置検出システム2Cに送出する。そして、位置指示器1Cは、付加情報の識別情報は、無線通信モジュール42から位置検出システム2Cの無線通信部25Cに送出する。
位置検出システム2Cは、図12に示すように、センサ部20Cと、このセンサ部20Cに接続されるペン指示検出回路26Cと、無線通信部25Cとで構成されている。センサ部20Cは、この例では、位置検出システム2Bのセンサ部20Bと同一の構成とされている。また、ペン指示検出回路26Cは、バンドパスフィルタ223Cと制御回路220Cとを除き、ペン指示検出回路26Bと同一の構成とされている。
この構成タイプ4の位置指示器1Cのバンドパスフィルタ223Cは、この例では、周波数f2を中心周波数とする通過周波数帯域とするものとされている。また、制御回路220Cは、位置検出用信号と共に送られてくる筆圧情報及びサイドスイッチ情報を検出する機能を備えるものとなっている。
この例の構成タイプ4の位置指示器1Cにおいては、中心電極送信信号生成部412は、制御部410からの制御を受けて、連続送信期間と送信データ期間を1周期とするパターンの信号を繰り返し出力するようにする。図13(A)は、位置指示器1Cの制御部410から中心電極送信信号生成部412に供給される制御信号の例を示すものである。中心電極送信信号生成部412は、この図13(A)の制御信号のハイレベルを維持する一定期間では、図13(B)に示すように、周波数f2の発振信号をバースト信号として連続送信する(図13(C)の連続送信期間)。
この連続送信期間の長さは、位置検出システム2Cのペン指示検出回路26Cにおいて、位置指示器1Cによるセンサ部20C上の指示位置を検出することが可能な時間長とされ、例えば第1の導体211Y及び第2の導体212Xの全てを1回以上、好ましくは複数回以上スキャンすることができる時間長とされる。
この連続送信期間中に、位置指示器1Cの制御部410は、中心電極7に印加される筆圧を、筆圧検出ユニット9の可変容量コンデンサの静電容量に基づいて算出し、その算出した筆圧値の情報を複数ビットの値(2進コード)として求める。また、制御部410は、サイドスイッチ43のオン・オフ情報をサイドスイッチ情報として、1ビットあるいは複数ビットの情報として生成する。
そして、制御部410は、図13(A)に示すように、連続送信期間の終了後、送信データ期間において、制御信号を所定の周期(Td)でハイレベルまたはローレベルに制御することにより、周波数f2の交流信号をASK(Amplitude Shift Keying)変調する。ASK変調の代わりに、OOK(On Off Keying)信号とするようにしてもよい。
このとき、連続送信期間の後の所定の周期(Td)の初回は必ずハイレベルとし、それを図13(C)のスタート信号とする。このスタート信号は、以降のデータ送出タイミングを位置検出システム2Cのペン指示検出回路26Cで正確に判定することができるようにするためのタイミング信号である。なお、このスタート信号に代えて、連続送信期間のバースト信号をタイミング信号として利用することもできる。
位置指示器1Cの中心電極送信信号生成部412は、以上の制御部410からの制御を受けて、送信データ期間において、スタート信号に続いて、複数ビットの筆圧情報及び1または複数ビットのサイドスイッチ情報を順次送信する。この場合に、図13(A)及び(B)に示すように、送信データ(2進コード)が「0」のときは、制御信号(図13A)をローレベルとして交流信号の送出はせず、送信データ(2進コード)が「1」のときは制御信号をハイレベルとして交流信号の送出するように制御して、ASK変調を行うようにする。
位置検出システム2Cのペン指示検出回路26Cにおいては、制御回路220Cは、連続送信期間の受信信号から、前述した位置検出システム2Bと同様にして、位置指示器1Cによる指示位置を検出する。そして、制御回路220Cは、連続送信期間の終了を待ち、連続送信期間の終了後のスタート信号を検出したら、送信データ期間の筆圧情報及びサイドスイッチ情報のデータを検出して、それらを復元する動作を行う。そして、制御回路220Cは、無線通信部25Cを通じて受信した識別情報と共に、位置指示器1Cによる指示位置の検出情報と、筆圧情報と、サイドスイッチ情報を、ホストコンピュータなどに出力するようにする。
なお、この構成タイプ4の位置指示器1Cにおいても、位置検出用信号の周波数を、ノイズの影響を軽減することができるように、構成タイプ3の位置指示器1Bと同様に切り替える構成としてもよい。その場合には、位置検出システム2Cのバンドパスフィルタ223C及び制御回路220Cも、構成タイプ3に対応する位置検出システム2Bのバンドパスフィルタ223B及び制御回路220Bと同様の機能を有するように構成する。
<構成タイプ5の位置指示器1Dと、対応する位置検出システム2D>
図14は、構成タイプ5の位置指示器1Dと、対応する位置検出システム2Dとの主要部の回路例を示す図である。構成タイプ5の位置指示器1Dは、位置検出用信号として周波数f2の交流信号を送出すると共に、全ての付加情報、この例では筆圧情報、サイドスイッチ情報及び識別情報ID1は、位置検出用信号と共に、中心電極7を通じて位置検出システム2Dに送出する。
位置検出システム2Dは、図14に示すように、センサ部20Dと、このセンサ部20Dに接続されるペン指示検出回路26Dと、無線通信部25Dを備えて構成されている。センサ部20Dは、この例では、位置検出システム2Bのセンサ部20Bと同一の構成とされている。また、ペン指示検出回路26Dは、制御回路220Dを除き、バンドパスフィルタ223Dも含め、ペン指示検出回路26Cと同一の構成とされている。すなわち、バンドパスフィルタ223Dは、この例では、周波数f2を中心周波数とする通過周波数帯域とするものとされている。そして、制御回路220Dは、位置検出用信号と共に送られてくる筆圧情報、サイドスイッチ情報及び識別情報ID1を検出する機能を備えるものとなっている。
この例の構成タイプ5の位置指示器1Dにおいても、前述した構成タイプ4の位置指示器1Cと同様にして、中心電極送信信号生成部412は、制御部410からの制御を受けて、図15に示すように、連続送信期間と送信データ期間を1周期とするパターンの信号を繰り返し出力するようにする。
図15(A)は、位置指示器1Dの制御部410から中心電極送信信号生成部412に供給される制御信号の例を示すものである。この例の位置指示器1Dの中心電極送信信号生成部412は、この図15(A)の制御信号による制御を受けて、連続送信期間では、図15(B)に示すように、周波数f2の発振信号をバースト信号として連続送信し、また、送信データ期間では、図15(B)及び(C)に示すように、筆圧情報と、サイドスイッチ情報と、識別情報ID1とをASK信号として、中心電極7を通じて位置検出システム2Dに送信する。
位置検出システム2Dの制御回路220Dは、連続送信期間のバースト信号に基づいて、位置指示器1Dにより指示されたセンサ部20D上の位置を検出すると共に、送信データ期間において、筆圧情報、サイドスイッチ情報及び識別情報ID1を検出して復元する。
そして、この例では、位置指示器1Dと位置検出システム2Dとの間の信号の授受を、よりセキュアにするために、位置指示器1Dは、識別情報ID2を無線通信モジュール42から位置検出システム2Dの無線通信部25Dに送出する。この場合に、識別情報ID1と識別情報ID2とは、同一の情報(ID1=ID2)とされる。制御回路220Dは、無線通信部25Dを通じて取得した識別情報ID2と、中心電極7を通じて受信し検出した識別情報ID1とを照合して、両者が一致したときにのみ、位置指示器1Dから取得した信号を有効として処理する。
そして、制御回路220Dは、位置指示器1Dから取得した信号を有効としたときには、位置指示器1Dによる指示位置の検出情報と、筆圧情報と、サイドスイッチ情報及び識別情報ID1を、ホストコンピュータなどに出力するようにする。
図16は、位置検出システム2Dの制御回路220Dにおける識別情報ID1とID2とを用いたセキュア処理の流れを示すフローチャートである。
制御回路220Dは、無線通信部25Dを通じて受信した識別情報ID2を一時保持する(ステップS21)。次に、制御回路220Dは、位置指示器1Dの中心電極7を通じて送信されてきた情報に含まれる識別情報ID1を取得する(ステップS22)。そして、制御回路220Dは、識別情報ID1と識別情報ID2とが一致しているか否か判別し(ステップS23)、両識別情報ID1,ID2が一致していると判別したときには、位置指示器1Dからの信号を有効として処理し(ステップS24)、その後、処理をステップS21に戻し、このステップS21以降の処理を繰り返す。また、ステップS23で、識別情報ID1と識別情報ID2とが一致していないと判別したときには、制御回路220Dは、位置指示器1Dからの信号は無効として処理し(ステップS25)、その後、処理をステップS21に戻し、このステップS21以降の処理を繰り返す。
なお、位置検出システム2Dにおける、無線通信モジュール42からの識別情報ID2と、中心電極7を通じて取得した識別情報ID1との照合を用いたセキュア処理は、必須のものではなく、行わなくてもよい。
[他の実施形態]
<静電結合方式の他の例>
上述した位置指示器の複数の構成タイプは、一例であって、ここに接続した構成タイプのものに限られるものではないことは言うまでもない。例えば、上述のアクティブ方式の位置指示器においては、中心電極7のみから信号を送出するようにしたが、位置指示器の位置検出システム上での傾き角や回転角を検出することができるようにするために、周辺電極6を、複数個に分割して、その分割した複数個の周辺分割電極のそれぞれから、それらの周辺分割電極を識別することができるようにするための信号を送出する構成の位置指示器を、一つの構成タイプとしてもよい。
図17は、そのような構成タイプの位置指示器をも構成することが可能な位置指示器1Eの要部を示す図で、図17(A)は、中心電極7側の構成部分を説明するための図であり、図17(B)は、当該位置指示器1Eを、中心電極7の先端側から、その軸心方向に見たときの図である。
この位置指示器1Eにおいては、筐体3の、中心電極7が挿入される開口3aの周囲に設けられる導電体からなる周辺電極は、3分割された周辺分割電極6A,6B,6Cとして設けられる。これら周辺分割電極6A,6B,6Cは、図17(A)及び(B)に示すように、互いに電気的に絶縁されて分離されて設けられている。
そして、上述のパッシブ方式の構成タイプ1の場合及びアクティブ方式の構成タイプ3,4,5の場合には、これらの周辺分割電極6A,6B,6Cは用いない。パッシブ方式の改良方式の構成タイプ2の場合には、周辺分割電極6A,6B,6Cを電気的に接続し、それら周辺分割電極6A,6B,6Cの全てで受信した信号を合成して、帰還信号生成回路415に供給するように構成する。
そして、位置指示器1Eで、位置検出システム上での傾き角や回転角を検出することができるようにする構成タイプの位置指示器を構成する場合には、中心電極7からは、位置検出用信号及び構成タイプに応じて選択された付加情報を送信するようにすると共に、周辺分割電極6A,6B,6Cのそれぞれから、それら周辺分割電極6A,6B,6Cのそれぞれを、位置検出システムで検出することができるような信号を送出するように構成する。
例えば、周辺分割電極6A,6B,6Cのそれぞれから、それぞれに対応する識別情報(例えば2ビットの信号)を送出するように構成する。あるいは、周辺分割電極6A,6B,6Cのそれぞれから、互いに異なる周波数や位相の信号を送出するようにする。あるいは、中心電極7からの信号の送出を終了した後、一つの周波数の信号を、周辺分割電極6A,6B,6Cの順に、所定期間ずつ送出するように構成する。
位置検出システム上での傾き角や回転角を検出することができるようにする構成タイプの位置指示器に対応する位置検出システムは、周辺分割電極6A,6B,6Cのそれぞれからの信号の受信強度や受信信号の広がり分布パターンなどから、位置指示器1Eの回転角や傾き角を検出する機能を有するものである。
<電磁結合方式の例>
また、上述の実施形態は、静電結合方式の位置指示器及び位置検出システムの場合であったが、電磁結合方式の位置指示器及び位置検出システムの場合にも、この発明は適用可能である。
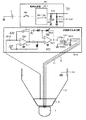
図18は、この発明による電磁結合方式の位置指示器100の構成例を示すもので、上述した実施形態の位置指示器1について示した図1の概念的構成図に対応するものである。
この図18に示すように、この実施形態の位置指示器100は、絶縁物例えば樹脂からなる筒状の筐体103内に、信号送信制御回路141と、無線通信モジュール142と、サイドスイッチ143と、IDメモリ144と、発振器145とを備えると共に、筆圧検出ユニット109を備える。また、バッテリー105が、信号送信制御回路141、無線通信モジュール142、サイドスイッチ143、IDメモリ144、発振器145などへの電源電圧の供給源として筐体103内に設けられている。信号送信制御回路141は、ペン種判別部1411を備えている。
そして、筆圧検出ユニット109には、フェライトコア110を貫通する芯体107が結合されており、筆圧検出ユニット109は、この芯体107に印加される筆圧を、当該筆圧検出ユニット109で構成される可変容量コンデンサの静電容量として検出する。フェライトコア110には、コイル111が巻回されており、このコイル111の両端が信号送信制御回路141に接続されている。また、コイル111の両端の間には、当該コイル111と共振回路を構成するコンデンサ112が接続されている。
信号送信制御回路141には、上述の実施形態の位置指示器1と同様に、無線通信モジュール142と、サイドスイッチ143と、IDメモリ144と、発振器145が接続されていると共に、筆圧検出ユニット109で構成される可変容量コンデンサも、この信号送信制御回路141に接続されている。
信号送信制御回路141は、この位置指示器100においては、コイル111とコンデンサ112を含む共振回路を通じて送信する信号を選択制御するようにすると共に、筆圧情報、サイドスイッチ情報、識別情報などの付加情報を、無線通信モジュール142から送信するか、共振回路からの信号として送信するかを選択制御する。
すなわち、この実施形態の位置指示器100の場合、共振回路が第1の送信部を構成し、無線通信モジュール142の送信機能部が第1の送信部を構成する。また、無線通信モジュール142の受信機能部が、位置検出システムからのペン種情報を受信する受信部を構成する。無線通信モジュール142の受信機能部で、位置検出システムから受信したペン種情報は、信号送信制御回路141のペン種判別部1411に供給される。ペン種判別部1411は、図示は省略するが、この実施形態においてもペン種の判断処理部と、ペン種テーブルメモリとで構成することができる。
この実施形態の位置指示器100の信号送信制御回路141は、位置検出システムからのペン種情報を受信して、ペン種判別部1411で判断して、ペン種を決定し、例えば図19(A),(B),(C)に示すような3種の構成タイプ6,7,8の位置指示器100A,100B,100Cを構成することができるようにしている。
位置指示器100の無線通信モジュール142の受信機能部を通じて位置検出システムから受信したペン種情報が、構成タイプ6であった場合には、信号送信制御回路141により、図19(A)に示すような位置指示器100Aが構成される。すなわち、この構成タイプ6においては、コイル111とコンデンサ112とからなる並列共振回路に並列に、筆圧検出ユニット109で構成される可変容量コンデンサが接続され、さらに、サイドスイッチ143とコンデンサ113との直列回路が接続される。
そして、この構成タイプ6の位置指示器100Aと共に使用され、構成タイプ6をペン種情報として位置指示器100Aに送る位置検出システム200Aのセンサ部は、図示は省略するが、複数個のループコイルが互いに直交するX方向及びY方向に配列されて構成されており、ループコイルから周波数faの送信信号(交流信号)が位置指示器100Aに送信される。
位置指示器100Aでは、電磁結合により位置検出システム200Aからの交流信号を共振回路で受信し、その後、当該共振回路から位置検出システム200Aに交流信号を帰還させる。位置検出システム200Aでは、交流信号を送信したループコイルの位置と、位置指示器100Aからの帰還信号を受信したループコイルの位置とから、位置指示器100Aにより指示された位置を検出するようにする。
この場合に、位置指示器100Aからの帰還信号は、共振回路の共振周波数が、筆圧検出ユニット109で構成される可変容量コンデンサの静電容量の値により変化することにより変化するので、位置検出システム200Aでは、その周波数の変化(あるいは位相の変化)により筆圧情報を検出するようにする。
また、サイドスイッチ143のオン・オフにより共振回路に対してコンデンサ113が接続あるいは非接続になるため、当該サイドスイッチ143のオン・オフに応じて共振回路の共振周波数が変化する。位置検出システム200Aでは、位置指示器100Aからの帰還信号の周波数の変化(あるいは位相の変化)により、サイドスイッチ143のオン・オフに応じたサイドスイッチ情報を検出する。
なお、この構成タイプ6の位置指示器100Aは、識別情報は、無線通信モジュール142の送信機能部を通じて位置検出システム200Aの無線通信部に送信される。
位置指示器100の無線通信モジュール142の受信機能部を通じて位置検出システムから受信したペン種情報が、構成タイプ7であった場合には、信号送信制御回路141により、図19(B)に示すような位置指示器100Bが構成される。すなわち、この構成タイプ7においては、並列共振回路は、コイル111とコンデンサ112とからなるものとされる。そして、筆圧情報と、サイドスイッチ情報と、識別情報とは、全て無線通信モジュール142の送信機能部を通じて位置検出システム200Bの無線通信部に送信される。
この構成タイプ7の位置指示器100Bと共に使用され、構成タイプ7をペン種情報として位置指示器100Bに送る位置検出システム200Bのセンサ部は、位置検出システム200Aのセンサ部と同じ構成を備え、ループコイルから周波数faの送信信号(交流信号)を位置指示器100Bに送信する。
位置指示器100Bでは、位置指示器100Aと同様にして、電磁結合により位置検出システム200Bからの交流信号を共振回路で受信し、その後、当該共振回路から位置検出システム200Bに交流信号を帰還させる。位置検出システム200Bでは、位置検出システム200Aと同様にして、位置指示器100Bより指示された位置を検出する。
この構成タイプ7の位置検出システム200Bは、帰還信号の周波数や位相の変化を監視して、付加情報を検出する機能を備えない。そして、位置検出システム200Bは、無線通信部を通じて受信した付加情報をデコードして、筆圧情報、サイドスイッチ情報及び識別情報を取得するようにする。
位置指示器100の無線通信モジュール142の受信機能部を通じて位置検出システムから受信したペン種情報が、構成タイプ8であった場合には、信号送信制御回路141により、図19(C)に示すような位置指示器100Cが構成される。すなわち、この構成タイプ8の位置指示器100Cにおいては、コイル111とコンデンサ112とからなる並列共振回路は、発振器145と結合されて、発振回路145Sが構成される。そして、この発振回路145Sからの発振信号が、コイル111とコンデンサ112とからなる並列共振回路を通じて位置検出システム200Cに送信される。
そして、筆圧情報と、サイドスイッチ情報と、識別情報とは、全て無線通信モジュール142の送信機能部を通じて位置検出システム200Cの無線通信部に送信される。
そして、この構成タイプ8の位置指示器100Cと共に使用され、構成タイプ8をペン種情報として位置指示器100Cに送る位置検出システム200Cのセンサ部は、図示は省略するが、複数個のループコイルが互いに直交するX方向及びY方向に配列されて構成されている。
そして、位置検出システム200Cは、位置指示器100Cから送信される交流信号を、電磁結合によりループコイルで受信する。そして、位置検出システム200Cは、交流信号を受信したX方向及びY方向のループコイルの位置から、位置指示器100Cにより指示された位置を検出するようにする。
なお、以上の構成タイプ6〜8も一例であり、電磁結合方式の位置指示器と位置検出システムについての構成タイプは、その他種々のものが存在し、この発明の位置指示器は、それらの種々の構成タイプにも対応するように構成することができることも言うまでもない。例えば、上述の構成6〜8の例では、共振回路を通じて識別情報は送信することはしなかったが、共振回路の共振動作、あるいは発振回路145Sの発振動作のオン・オフを制御することで、ASK変調信号や、OOK信号として、識別情報を芯体107側から送信する構成タイプとすることもできる。
[その他の実施形態または変形例]
上述の実施形態の筆圧検出ユニット9,109は、誘電体を第1の電極と第2の電極で挟み、その第1の電極と第2の電極の内、一方を筆圧に応じて軸心方向に移動可能にすることで、静電容量が筆圧に応じて可変となる可変容量コンデンサを用いるようにしたが、この構成に限られるものではない。例えば、特開2013−161307号公報に開示されているような筆圧に応じて静電容量を可変とする半導体素子を用いて筆圧検出ユニット9を構成することもできる。また、静電容量ではなく、インダクタンス値や抵抗値を筆圧に応じて可変とする構造や素子を用いることで、筆圧検出ユニットを構成するようにしてもよい。
また、付加情報は、前述もしたように、筆圧情報、サイドスイッチ情報、識別情報などに限られるものではなく、例えば電池の残量情報など、その他種々の情報を付加情報とすることができる。
また、上述の実施形態の説明においては、位置指示器の駆動電源は電池としたが、電源電圧を蓄積するコンデンサを位置指示器に設けて、当該コンデンサを駆動電源として用いるようにしてもよい。その場合に、コンデンサに電源電圧を蓄積する構成は、電磁誘導や電界結合によって電力エネルギーを外部から受け取って充電する充電回路の構成としてもよいし、位置指示器にさらに充電端子を設けて、専用の充電装置から当該充電端子を通じて充電電流を供給するように構成してもよい。そして、外部からの電力エネルギー(電磁エネルギーや電界エネルギー)は、位置検出装置から位置指示器に供給するようにしてもよいし、専用の電力供給装置から供給するようにしてもよい。
また、上述の実施形態では、位置指示器は、送信部は中心電極と、無線通信モジュールの2個としたが、3個以上を備えるようにしてもよい。
なお、上述の実施形態の位置指示器の説明では、位置指示器を位置検出システムのセンサ部に近づける等することにより、位置指示器は、自動的に当該位置検出システムに対応する構成タイプとなるようにした。しかし、位置検出システムではなく、位置指示器の無線通信モジュールと通信可能なパソコンなどの外部装置と通信をすると共に、パソコンなどの外部装置で構成タイプを選択することより、位置指示器を、当該選択された所望の構成タイプに設定することができるように構成してもよい。
また、位置指示器に構成タイプの切替設定用のスイッチを設け、その切替設定用のスイッチによる切り替え操作により、位置指示器を、当該所望の構成タイプに設定することができるように構成してもよい。すなわち、例えば図18の例において、筐体103に、使用者が操作可能な押釦スイッチ146を設け、この押釦スイッチ146の押下操作信号を信号送信制御回路141に供給するように構成する。この場合には、信号送信制御回路141では、例えば、使用者により押釦スイッチ146が押下されるごとに、構成タイプを変更するように制御する。なお、図1の例においても、同様に押釦スイッチを設けても勿論よい。