JP6907448B2 - タンクおよび容器のための音響検量アレイ - Google Patents
タンクおよび容器のための音響検量アレイ Download PDFInfo
- Publication number
- JP6907448B2 JP6907448B2 JP2019556253A JP2019556253A JP6907448B2 JP 6907448 B2 JP6907448 B2 JP 6907448B2 JP 2019556253 A JP2019556253 A JP 2019556253A JP 2019556253 A JP2019556253 A JP 2019556253A JP 6907448 B2 JP6907448 B2 JP 6907448B2
- Authority
- JP
- Japan
- Prior art keywords
- container
- transducer
- sensors
- acoustic
- tof
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images
















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01F—MEASURING VOLUME, VOLUME FLOW, MASS FLOW OR LIQUID LEVEL; METERING BY VOLUME
- G01F17/00—Methods or apparatus for determining the capacity of containers or cavities, or the volume of solid bodies
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/04—Analysing solids
- G01N29/043—Analysing solids in the interior, e.g. by shear waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/04—Analysing solids
- G01N29/07—Analysing solids by measuring propagation velocity or propagation time of acoustic waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/22—Details, e.g. general constructional or apparatus details
- G01N29/223—Supports, positioning or alignment in fixed situation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/22—Details, e.g. general constructional or apparatus details
- G01N29/26—Arrangements for orientation or scanning by relative movement of the head and the sensor
- G01N29/265—Arrangements for orientation or scanning by relative movement of the head and the sensor by moving the sensor relative to a stationary material
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/34—Generating the ultrasonic, sonic or infrasonic waves, e.g. electronic circuits specially adapted therefor
- G01N29/341—Generating the ultrasonic, sonic or infrasonic waves, e.g. electronic circuits specially adapted therefor with time characteristics
- G01N29/343—Generating the ultrasonic, sonic or infrasonic waves, e.g. electronic circuits specially adapted therefor with time characteristics pulse waves, e.g. particular sequence of pulses, bursts
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0255—Control of position or course in two dimensions specially adapted to land vehicles using acoustic signals, e.g. ultra-sonic singals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/01—Indexing codes associated with the measuring variable
- G01N2291/011—Velocity or travel time
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/02—Indexing codes associated with the analysed material
- G01N2291/028—Material parameters
- G01N2291/02854—Length, thickness
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/04—Wave modes and trajectories
- G01N2291/042—Wave modes
- G01N2291/0427—Flexural waves, plate waves, e.g. Lamb waves, tuning fork, cantilever
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/10—Number of transducers
- G01N2291/102—Number of transducers one emitter, one receiver
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/10—Number of transducers
- G01N2291/103—Number of transducers one emitter, two or more receivers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/10—Number of transducers
- G01N2291/105—Number of transducers two or more emitters, two or more receivers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/26—Scanned objects
- G01N2291/263—Surfaces
- G01N2291/2634—Surfaces cylindrical from outside
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/26—Scanned objects
- G01N2291/269—Various geometry objects
- G01N2291/2695—Bottles, containers
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2111/00—Details of signals used for control of position, course, altitude or attitude of land, water, air or space vehicles
- G05D2111/20—Acoustic signals, e.g. ultrasonic signals
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- Acoustics & Sound (AREA)
- Engineering & Computer Science (AREA)
- Fluid Mechanics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Aviation & Aerospace Engineering (AREA)
- Automation & Control Theory (AREA)
- Length Measuring Devices Characterised By Use Of Acoustic Means (AREA)
- Investigating Or Analyzing Materials By The Use Of Ultrasonic Waves (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
Description
当業者には理解されるように、センサ120A〜120Cは、任意の様々なセンサまたは送受信機とすることができ、これらは、コンテナの外部表面に据え付けられ、コンテナの壁から壁に沿って放射する機械波の信号を検出および受信し、そのような情報を処理するのに好適である。好ましくは、センサは、波の検出に対する位置の誤差を最小限に抑えるように、表面に接触する極めて小さい先端を有する。この先端のサイズは、システムの必要な精度の関数として定義され得る。例えば、圧電センサ、広帯域音響トランスデューサなど、様々な種類のセンサが使用され得る。
上述したように、当業者には理解されるように、信号生成装置(例えば、トランスデューサ130)は、機械信号および/または音響信号をコンテナの壁に印加するのに好適な任意の様々なトランスデューサまたは送受信機とすることができ、その結果、それらの信号は、コンテナの円周の周りのコンテナ壁を通って、またはそれに沿って、伝搬する。
前述したように、いくつかの構成では、システム100は、1つ以上のロボットを含み得、これらのロボットは、一時的なやり方で検量されるコンテナ上に、測定装置のうちの1つ以上を自立的および半自立的に配備するように構成されている。図1に示す典型的な構成では、音響トランスデューサ130Aは、ロボット160を使用して配備される。いくつかの構成では、ロボットは、それぞれの場所で装置をコンテナに取り付けることによって、測定装置を配備し得る。したがって、ロボットは、複数の異なる測定装置を配備し得る。他の構成では、測定装置が、ロボットに搭載され得、その結果、その配備は、ロボットを所定の位置に移動することを含み、そのロボットは、壁155と通信する装置を設置し、その後、必要に応じて、別の位置に移動し得る。そのような配設では、ロボットが、それ自体を再配置し、任意選択的に装置を移動して、システムにより実装されたコードのプログラム制御下で、コンテナと係合することができる。

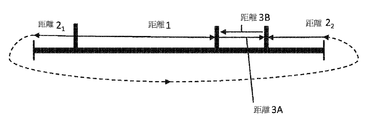
前述の解法を使用した計算は、音響装置のうちの2つ以上の間の既知の位置に基づく関係を必要とし得る。例えば、既知の関係は、音響装置のうちの2つ(例えば、センサ620Aおよびトランスデューサ630)の間の既知の、または独立に測定された距離とすることができる。いくつかの実施態様では、既知の関係は、長手方向および/または横方向における表面上の少なくとも2つの音響装置の既知の整列とすることができる。当業者には理解されるように、コンテナの寸法の計算は、また、追加の想定、例えば、コンテナの一定の高さ、円筒形状、一定の曲率半径などに基づき得る。
解として解かれ得、また、音速の計算が前提条件を検証することも可能になり得る。前述したように、上記の典型的な連立方程式は、コンテナがその高さ全体にわたって同じ円周を有するという前提に基づいて、簡略化されている。
Claims (18)
- 複数の音響装置を使用して貯蔵コンテナの容積を測定する方法であって、前記複数の音響装置が、トランスデューサおよび1つ以上のセンサを含み、前記方法が、
前記複数の音響装置を前記コンテナの円周壁の外側表面上のそれぞれの位置に配備することであって、前記1つ以上のセンサが、前記表面に音響的に結合され、かつ前記コンテナの壁に沿って円周方向に伝播する1つ以上のパルスを検出するように構成され、前記トランスデューサが、前記表面に音響的に結合され、かつ前記1つ以上のパルスを生成するように構成され、前記1つ以上のパルスが、少なくとも第1の円周経路および第2の円周経路において、前記トランスデューサから離れ、前記1つ以上のセンサに向かって、前記壁に沿って放射する、配備することと、
前記トランスデューサを使用して前記1つ以上のパルスを生成することであって、各パルスがインパルス時間に生成される、生成することと、
前記1つ以上のセンサを使用して、前記第1の円周経路および前記第2の円周経路に沿って放射する前記1つ以上のパルスを検出し、それぞれの円周経路に沿って放射する前記1つ以上のパルスが検出されるそれぞれの時間を記録することと、
前記インパルス時間およびそれぞれの検出時間に基づいて、前記1つ以上のセンサと電子通信する計算装置によって、前記1つ以上のパルスに対するそれぞれの飛行時間(TOF)を計算することであって、各それぞれのTOFは、前記パルスが特定の円周経路に沿って前記音響装置のうちの2つの間を伝搬する経過時間である、計算することと、
前記計算装置を使用して、前記それぞれのTOFおよび前記壁を通る音速に基づいて、前記第1および第2の円周経路の各々における音響装置間のそれぞれの距離を計算することと、
前記計算装置を使用して、前記計算されたそれぞれの距離に基づいて、前記貯蔵コンテナの前記容積を判定することと、を含む、方法。 - 前記複数の音響装置を配備することが、既知の距離だけ分離されたそれぞれの位置に少なくとも第1の音響センサおよび第2の音響センサを配備することを含み、
前記計算装置を使用して、前記既知の分離距離を有する前記第1および第2の音響センサの間で放射する前記パルスのTOFを計算するステップと、
前記計算装置を使用して、前記第1および第2の音響センサの間で放射する前記パルスの前記TOF、ならびに前記既知の分離距離に基づいて、前記壁を通る前記音速を計算するステップと、をさらに含む、請求項1に記載の方法。 - 前記計算されたTOFに基づいて、前記コンテナの前記円周壁に対して横方向および長手方向のうちの1つ以上に、前記音響装置のうちの少なくとも2つを整列させること、をさらに含む、請求項1に記載の方法。
- 前記整列させるステップが、
前記表面上の前記音響装置のうちの1つ以上の前記それぞれの位置を前記横方向および長手方向のうちの1つ以上に反復調整することと、
1つ以上の再計算されたTOFが、前記音響装置のうちの少なくとも2つの前記それぞれの位置が横方向および長手方向のうちの1つ以上に整列されていることを示すまで、前記生成するステップ、検出するステップ、およびTOFを計算するステップを繰り返すことと、を含む、請求項3に記載の方法。 - 前記配備するステップが、前記計算装置の制御下で動作する1つ以上のロボットを使用して、前記表面上のそれぞれの位置に前記1つ以上の音響装置を配備することを含む、請求項4に記載の方法。
- 前記音響装置のうちの1つ以上の前記それぞれの位置を反復調整する前記ステップが、
前記計算装置およびロボットを使用して、前記トランスデューサを前記長手方向に所定量移動させることであって、前記トランスデューサの前記それぞれの位置、および前記所定量が、前記ロボットに搭載された1つ以上の位置センサを使用してほぼリアルタイムで測定される、移動させること、を含む、請求項4に記載の方法。 - 前記コンテナの前記表面上の前記複数のセンサをそれぞれの位置に配備することが、前記コンテナの前記表面上の異なるそれぞれの高さに前記複数のセンサを配備することと、
ロボットを使用して、前記コンテナの前記表面に沿って長手方向に前記トランスデューサを段階的に再位置決めすることと、
生成するステップ、検出するステップ、および前記トランスデューサの各々の位置の前記1つ以上のパルスに対するTOFを計算するステップを繰り返すことと、
前記計算されたTOFに基づいて、前記トランスデューサが前記長手方向に前記センサのうちの1つ以上と整列されているかどうかを判定することと、
前記計算されたTOFに基づいて、前記トランスデューサが前記複数のセンサのうちの1つ以上と整列していると判定される各位置において、前記コンテナの円周長を計算することと、を含む、請求項1に記載の方法。 - 貯蔵コンテナの容積を測定するためのシステムであって、前記システムが、
前記コンテナの円周壁の外側表面のそれぞれの位置に配備されるように構成された複数の音響装置であって、前記音響装置が、
前記円周壁に音響的に結合され、かつ前記コンテナの壁に沿って円周方向に放射する1つ以上のパルスを検出するように構成されている複数のセンサと、
前記表面に音響的に結合され、かつ前記1つ以上のパルスを生成するように構成されたトランスデューサであって、前記1つ以上のパルスが、前記トランスデューサから離れて前記コンテナの壁に沿って、それぞれの円周経路に沿って前記複数のセンサに向かって放射する、トランスデューサと、を含む、音響装置と、
制御計算システムであって、
非一時的コンピュータ可読記憶媒体と、
前記複数の音響装置、および前記コンピュータ可読記憶媒体と電子通信する1つ以上のプロセッサと、
前記記憶媒体に格納された実行可能な命令を含む1つ以上のソフトウェアモジュールであって、前記1つ以上のソフトウェアモジュールが、前記プロセッサにより実行可能であり、
前記トランスデューサを使用して、それぞれのインパルス時間に前記トランスデューサを使用した前記1つ以上のパルスを生成するように前記プロセッサを構成する信号制御モジュールであって、前記信号制御モジュールが、前記センサを使用して、前記センサにおける前記1つ以上のパルスの到着をそれぞれ検出し、かつそれぞれの検出時間を記録するように前記プロセッサをさらに構成する、信号制御モジュールと、
前記それぞれのインパルス時間およびそれぞれの検出時間に基づいて、前記1つ以上のパルスに対するそれぞれの飛行時間(TOF)を計算するように、前記プロセッサを構成する信号分析モジュールであって、それぞれのTOFは、前記パルスがそれぞれの円周経路に沿った前記音響装置のうちの2つの間を伝搬する経過時間である、信号分析モジュールと、
前記それぞれのTOF、および前記壁を通る音速に基づいて、前記音響装置間の距離を計算し、前記計算された距離に基づいて、前記貯蔵コンテナの前記容積を計算するように、前記プロセッサを構成する幾何学的分析モジュールと、を含む、ソフトウェアモジュールと、を備える、制御計算システムと、を備える、システム。 - 前記円周壁の前記表面上に前記音響装置のうちの1つ以上を配備するように構成されたロボットであって、前記ロボットが、駆動システム、および前記ロボットの位置をモニタリングするための1つ以上の位置センサを含み、前記ロボットが、前記表面上の前記1つ以上の音響装置を制御可能に配備するように構成されている、ロボットと、
前記ソフトウェアモジュール中の位置制御モジュールであって、前記位置制御モジュールが、前記ロボットを使用して、前記長手方向に前記表面上の前記トランスデューサの前記それぞれの位置を反復調整し、かつ前記トランスデューサが前記音響センサのうちの少なくとも1つと長手方向に整列されるまでそれぞれのTOFを再計算するように、前記プロセッサを構成し、前記トランスデューサと前記少なくとも1つセンサとの間を伝搬するパルスに関する再計算された最小のTOFが前記プロセッサによって識別されたときに、整列が達成される、位置制御モジュールと、をさらに備える、請求項8に記載のシステム。 - 前記複数のセンサが、長手方向および横方向のうちの1つ以上に既知の距離だけ分離されたそれぞれの位置に配備されている少なくとも第1の音響センサおよび第2の音響センサを含む、請求項8に記載のシステム。
- 前記信号分析モジュールが、前記既知の分離距離を有する前記第1および第2の音響センサの間で放射する前記パルスのTOFを計算するように、前記プロセッサをさらに構成し、前記第1および第2の音響センサの間で放射する前記パルスの前記TOF、ならびに前記既知の分離距離に基づいて、前記壁を通る前記音速を計算するように、前記プロセッサをさらに構成する、請求項10に記載のシステム。
- 音響センサのアレイであって、前記アレイが、音響センサの少なくとも2つの平行な長手方向列を含み、長手方向列の前記音響センサが、既知の長手方向間隔だけ離間されており、前記2つの列が、前記横方向に既知の横方向間隔だけ離間されている、アレイ、をさらに備える、請求項10に記載のシステム。
- 貯蔵コンテナの容積を測定するためのシステムであって、前記システムが、
前記コンテナの円周壁の外側表面のそれぞれの位置に配備されるように構成された複数の音響装置であって、前記音響装置が、
前記円周壁に音響的に結合され、かつ前記コンテナの壁に沿って円周方向に放射する1つ以上のパルスを検出するように構成されている複数のセンサと、
前記表面に音響的に結合され、かつ前記1つ以上のパルスを生成するように構成されたトランスデューサであって、前記1つ以上のパルスが、前記トランスデューサから離れて前記コンテナの壁に沿って、それぞれの円周経路に沿って前記複数のセンサに向かって放射する、トランスデューサと、を含む、音響装置と、
前記円周壁の前記表面上に前記音響装置のうちの1つ以上を配備するように構成されたロボットであって、前記ロボットが、駆動システム、および前記ロボットの位置をモニタリングするための1つ以上の位置センサを含み、前記ロボットが、前記表面上の前記1つ以上の音響装置を制御可能に配備するように構成されている、ロボットと、
制御計算システムであって、
非一時的コンピュータ可読記憶媒体と、
前記複数の音響装置、前記ロボット、および前記非一時的コンピュータ可読記憶媒体と電子通信する1つ以上のプロセッサと、
前記記憶媒体に格納された実行可能な命令を含む1つ以上のソフトウェアモジュールであって、前記1つ以上のソフトウェアモジュールが、前記プロセッサにより実行可能であり、
前記トランスデューサを使用して、それぞれのインパルス時間に前記トランスデューサを使用した1つ以上のパルスを生成するように前記プロセッサを構成する信号制御モジュールであって、前記信号制御モジュールが、前記センサを使用して、前記センサにおける前記1つ以上のパルスの到着をそれぞれ検出し、かつそれぞれの検出時間を記録するように前記プロセッサをさらに構成する、信号制御モジュールと、
前記それぞれのインパルス時間およびそれぞれの検出時間に基づいて、前記1つ以上のパルスに対するそれぞれの飛行時間(TOF)を計算するように、前記プロセッサを構成する信号分析モジュールであって、それぞれのTOFは、前記パルスがそれぞれの円周経路に沿った前記音響装置のうちの2つの間を伝搬する経過時間である、信号分析モジュールと、
前記それぞれのTOF、および前記壁を通る音速に基づいて、前記音響装置間の距離を計算し、かつ前記計算された距離に基づいて、前記貯蔵コンテナの前記容積を計算するように、前記プロセッサを構成する幾何学的分析モジュールと、
前記ロボットを使用して、前記表面上の前記音響装置のうちの1つ以上の前記それぞれの位置を反復調整し、かつ前記音響装置のうちの少なくとも2つが横方向および長手方向のうちの1つに整列されるまでそれぞれのTOFを再計算するように、前記プロセッサを構成する位置制御モジュールであって、前記少なくとも2つの装置の整列が、前記少なくとも2つの音響装置の間で放射するパルスの前記再計算されたTOFが最小化されたときに達成される、位置制御モジュールと、を含む、ソフトウェアモジュールと、を含む、制御計算システムと、を備える、システム。 - 前記複数のセンサが、前記横方向および前記長手方向のうちの1つ以上に既知の距離だけ分離されたそれぞれの位置に配備されている、少なくとも第1の音響センサおよび第2の音響センサを含む、請求項13に記載のシステム。
- 前記信号分析モジュールが、前記既知の分離距離を有する前記第1および第2の音響センサの間に放射する前記パルスのTOFを計算するように、前記プロセッサをさらに構成し、前記第1および第2の音響センサの間に放射する前記パルスの前記TOF、ならびに前記既知の分離距離に基づいて、前記壁を通る音速を計算するように、前記プロセッサをさらに構成する、請求項14に記載のシステム。
- 前記プロセッサが、前記計算されたTOFに基づいて、前記コンテナの前記円周壁に対して横方向および長手方向のうちの1つ以上に、前記音響装置のうちの少なくとも2つの整列を制御するように構成されている、請求項13に記載のシステム。
- 前記位置制御モジュールが、前記トランスデューサが前記複数のセンサのうちの1つ以上と整列されるまで、前記トランスデューサの前記位置を前記長手方向に所定量だけ調整するように、前記プロセッサを構成する、請求項16に記載のシステム。
- 前記プロセッサが、前記トランスデューサが前記複数のセンサのうちの前記1つ以上と整列される各位置に対して、前記コンテナの円周を計算するように構成されている、請求項17に記載のシステム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/491,588 US10480982B2 (en) | 2017-04-19 | 2017-04-19 | Acoustic calibration array for tanks and vessels |
| US15/491,588 | 2017-04-19 | ||
| PCT/US2018/023316 WO2018194784A1 (en) | 2017-04-19 | 2018-03-20 | Acoustic calibration array for tanks and vessels |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2020517918A JP2020517918A (ja) | 2020-06-18 |
| JP2020517918A5 JP2020517918A5 (ja) | 2021-04-22 |
| JP6907448B2 true JP6907448B2 (ja) | 2021-07-21 |
Family
ID=61913572
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019556253A Expired - Fee Related JP6907448B2 (ja) | 2017-04-19 | 2018-03-20 | タンクおよび容器のための音響検量アレイ |
Country Status (8)
| Country | Link |
|---|---|
| US (2) | US10480982B2 (ja) |
| EP (1) | EP3612830B1 (ja) |
| JP (1) | JP6907448B2 (ja) |
| KR (1) | KR20200003385A (ja) |
| CN (1) | CN110520723A (ja) |
| SA (1) | SA519410187B1 (ja) |
| SG (1) | SG11201909387TA (ja) |
| WO (1) | WO2018194784A1 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10480982B2 (en) * | 2017-04-19 | 2019-11-19 | Saudi Arabian Oil Company | Acoustic calibration array for tanks and vessels |
| US10458831B2 (en) * | 2017-07-05 | 2019-10-29 | Saudi Arabian Oil Company | System and method for acoustic container volume calibration |
| US11097796B2 (en) * | 2018-11-29 | 2021-08-24 | Saudi Arabian Oil Company | Articulated magnet-bearing legs for UAV landing on curved surfaces |
| US11231311B2 (en) | 2019-05-31 | 2022-01-25 | Perceptive Sensor Technologies Llc | Non-linear ultrasound method and apparatus for quantitative detection of materials |
| EP3822660A1 (en) | 2019-11-13 | 2021-05-19 | ABB Schweiz AG | Integrity detection system for an ultrasound transducer |
| WO2022120074A1 (en) | 2020-12-02 | 2022-06-09 | Perceptive Sensor Technologies Llc | Variable angle transducer interface block |
| CA3205706A1 (en) * | 2020-12-04 | 2022-06-09 | Lazar Bivolarsky | Multi-path acoustic signal improvement for material detection |
| CN116940810A (zh) | 2020-12-04 | 2023-10-24 | 感知传感器技术股份有限公司 | 多次反射声音信号材料检测 |
| CN116829915A (zh) | 2020-12-04 | 2023-09-29 | 感知传感器技术股份有限公司 | 在分层环境中的声学温度测量 |
| US11525809B2 (en) | 2020-12-04 | 2022-12-13 | Perceptive Sensor Technologies, Inc. | Apparatus, system, and method for the detection of objects and activity within a container |
| US11549839B2 (en) | 2020-12-04 | 2023-01-10 | Perceptive Sensor Technologies, Inc. | Systems and methods for determining floating roof level tilt and characterizing runoff |
| US11788904B2 (en) | 2020-12-04 | 2023-10-17 | Perceptive Sensor Technologies, Inc. | Acoustic temperature measurement in layered environments |
| US11536696B2 (en) | 2020-12-04 | 2022-12-27 | Perceptive Sensor Technologies, Inc. | In-wall multi-bounce material property detection and acoustic signal amplification |
| US11604294B2 (en) | 2020-12-04 | 2023-03-14 | Perceptive Sensor Technologies, Inc. | Determining layer characteristics in multi-layered environments |
| CA3203819A1 (en) | 2020-12-30 | 2022-07-07 | Lazar Bivolarsky | Evaluation of fluid quality with signals |
| US11860014B2 (en) | 2022-02-11 | 2024-01-02 | Perceptive Sensor Technologies, Inc. | Acoustic signal detection of material composition in static and dynamic conditions |
| US11940420B2 (en) | 2022-07-19 | 2024-03-26 | Perceptive Sensor Technologies, Inc. | Acoustic signal material identification with nanotube couplant |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4805453A (en) * | 1982-10-14 | 1989-02-21 | Gilbarco, Inc. | Tank sonic gauging system and methods |
| US4748846A (en) * | 1982-10-14 | 1988-06-07 | Gilbarco, Inc. | Tank gauging system and methods |
| US5456114A (en) | 1993-04-23 | 1995-10-10 | Panametrics, Inc. | Elastic wave sensing system |
| US5765433A (en) * | 1995-03-10 | 1998-06-16 | Arizona Instrument Corporation | Liquid measuring system and methods |
| US6573732B1 (en) * | 1999-05-04 | 2003-06-03 | Ssi Technologies, Inc. | Dynamic range sensor and method of detecting near field echo signals |
| US6363788B1 (en) | 2000-06-07 | 2002-04-02 | Digital Wave Corporation | Noninvasive detection of corrosion, mic, and foreign objects in containers, using guided ultrasonic waves |
| US7216536B2 (en) | 2001-06-22 | 2007-05-15 | Young Manufacturing & Engineering, Inc. | Acoustic volume indicator |
| US6938488B2 (en) * | 2002-08-21 | 2005-09-06 | Battelle Memorial Institute | Acoustic inspection device |
| US6925870B2 (en) * | 2003-09-23 | 2005-08-09 | Battelle Memorial Institute | Ultrasonic fill level device and method |
| DE10348676A1 (de) * | 2003-10-15 | 2005-05-12 | Flowtec Ag | Vorrichtung zur Bestimmung und/oder Überwachung des Volumen- und/oder Massendurchflusses eines Mediums in einer Rohrleitung |
| EP1959229A1 (en) | 2007-02-19 | 2008-08-20 | Nederlandse Organisatie Voor Toegepast-Natuurwetenschappelijk Onderzoek Tno | Ultrasonic surface monitoring |
| EP2478353B1 (en) * | 2009-09-18 | 2016-11-02 | Conocophillips Company | High precision ultrasonic corrosion rate monitoring |
| US20120281096A1 (en) * | 2011-05-02 | 2012-11-08 | Honeywell-Enraf B.V. | Storage tank inspection system and method |
| US9052230B2 (en) * | 2011-05-13 | 2015-06-09 | Chevron U.S.A. Inc | Industrial process monitoring and imaging |
| US9188472B2 (en) | 2013-05-21 | 2015-11-17 | Saudi Arabian Oil Company | Enhanced reference line tank calibration method and apparatus |
| GB2521661A (en) | 2013-12-27 | 2015-07-01 | Xsens As | Apparatus and method for measuring flow |
| US20160041024A1 (en) * | 2014-08-11 | 2016-02-11 | Ssi Technologies, Inc. | Through-wall tank ultrasonic transducer |
| US20160320226A1 (en) * | 2015-04-30 | 2016-11-03 | Siemens Industry, Inc. | Determining height of a liquid level interface in a container from acoustic signal or echo time measurement |
| EP3115753B1 (en) * | 2015-07-06 | 2022-01-05 | ABB Schweiz AG | System and method for non-intrusive and continuous level measurement of a liquid |
| US10571328B2 (en) * | 2015-08-29 | 2020-02-25 | Mopeka Products Llc | Sensor arrangements, sensor systems, and methods for determining height of liquids in tanks |
| EP3362178B1 (en) * | 2015-10-12 | 2024-01-24 | Labcyte Inc. | Systems and methods for tagging and acoustically characterizing containers |
| DK3256862T3 (da) * | 2016-01-18 | 2021-05-25 | Gwf Messsysteme Ag | Forbedret stråleformende akustisk signalgennemløbstidsstrømningsmåler |
| US10480982B2 (en) * | 2017-04-19 | 2019-11-19 | Saudi Arabian Oil Company | Acoustic calibration array for tanks and vessels |
| US10458831B2 (en) * | 2017-07-05 | 2019-10-29 | Saudi Arabian Oil Company | System and method for acoustic container volume calibration |
-
2017
- 2017-04-19 US US15/491,588 patent/US10480982B2/en active Active
-
2018
- 2018-03-20 KR KR1020197033638A patent/KR20200003385A/ko not_active Withdrawn
- 2018-03-20 WO PCT/US2018/023316 patent/WO2018194784A1/en unknown
- 2018-03-20 CN CN201880025188.1A patent/CN110520723A/zh active Pending
- 2018-03-20 EP EP18716746.5A patent/EP3612830B1/en not_active Not-in-force
- 2018-03-20 SG SG11201909387T patent/SG11201909387TA/en unknown
- 2018-03-20 JP JP2019556253A patent/JP6907448B2/ja not_active Expired - Fee Related
-
2019
- 2019-08-09 US US16/537,246 patent/US10942054B2/en active Active
- 2019-09-24 SA SA519410187A patent/SA519410187B1/ar unknown
Also Published As
| Publication number | Publication date |
|---|---|
| KR20200003385A (ko) | 2020-01-09 |
| JP2020517918A (ja) | 2020-06-18 |
| US20180306628A1 (en) | 2018-10-25 |
| SA519410187B1 (ar) | 2022-07-20 |
| WO2018194784A1 (en) | 2018-10-25 |
| CN110520723A (zh) | 2019-11-29 |
| EP3612830B1 (en) | 2022-03-02 |
| US10942054B2 (en) | 2021-03-09 |
| EP3612830A1 (en) | 2020-02-26 |
| SG11201909387TA (en) | 2019-11-28 |
| US10480982B2 (en) | 2019-11-19 |
| US20190360850A1 (en) | 2019-11-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6907448B2 (ja) | タンクおよび容器のための音響検量アレイ | |
| US10935408B2 (en) | System and method for acoustic container volume calibration | |
| CN106404903B (zh) | 超声检查装置、超声检查系统和校准超声检查装置的方法 | |
| JP6652455B2 (ja) | 非破壊試験機器の自動較正 | |
| US7606113B2 (en) | Modeling sound propagation for underwater test areas | |
| MX2011010162A (es) | Procesamiento de datos sismicos. | |
| US12306138B2 (en) | Digital twin of an automated non-destructive ultrasonic testing system | |
| Darmon et al. | Main features of a complete ultrasonic measurement model: Formal aspects of modeling of both transducers radiation and ultrasonic flaws responses | |
| LT6977B (lt) | Ultragarsinės tomografijos būdas ir sistema vamzdynų korozijai įvertinti | |
| EP4170339A1 (en) | Ultrasonic inspection of complex surfaces | |
| Reusser et al. | Guided plate wave scattering at vertical stiffeners and its effect on source location | |
| RU2560754C1 (ru) | Способ ультразвукового контроля профиля внутренней поверхности изделия с неровными поверхностями | |
| CN109341819A (zh) | 自修正超声波测量装置及其测量方法 | |
| US11150369B2 (en) | Three-dimensional fracture radius model | |
| US10578589B2 (en) | System and method for ultrasound inspection with time reversal | |
| CN108957463B (zh) | 超声波的测量方法和装置 | |
| JP2021124498A (ja) | 超音波で動作する距離センサをテストするための検査装置 | |
| JP7551457B2 (ja) | 計測方法及び計測装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210309 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210310 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20210310 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20210430 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210601 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210609 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6907448 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |