JP6905323B2 - 画像処理装置、画像処理方法、およびプログラム - Google Patents
画像処理装置、画像処理方法、およびプログラム Download PDFInfo
- Publication number
- JP6905323B2 JP6905323B2 JP2016207259A JP2016207259A JP6905323B2 JP 6905323 B2 JP6905323 B2 JP 6905323B2 JP 2016207259 A JP2016207259 A JP 2016207259A JP 2016207259 A JP2016207259 A JP 2016207259A JP 6905323 B2 JP6905323 B2 JP 6905323B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- deformation
- interest
- region
- approximate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012545 processing Methods 0.000 title claims description 132
- 238000003672 processing method Methods 0.000 title claims description 4
- 238000006073 displacement reaction Methods 0.000 claims description 130
- 230000009466 transformation Effects 0.000 claims description 125
- 238000000034 method Methods 0.000 claims description 118
- 238000011156 evaluation Methods 0.000 claims description 76
- 230000008569 process Effects 0.000 claims description 48
- 230000014759 maintenance of location Effects 0.000 claims description 30
- 230000008859 change Effects 0.000 claims description 10
- 238000003384 imaging method Methods 0.000 claims description 10
- 238000006243 chemical reaction Methods 0.000 description 78
- 239000013598 vector Substances 0.000 description 57
- 238000012423 maintenance Methods 0.000 description 38
- 230000003902 lesion Effects 0.000 description 36
- 238000012986 modification Methods 0.000 description 21
- 230000004048 modification Effects 0.000 description 21
- 210000000056 organ Anatomy 0.000 description 19
- 239000011159 matrix material Substances 0.000 description 14
- 210000003205 muscle Anatomy 0.000 description 13
- 210000000062 pectoralis major Anatomy 0.000 description 13
- 238000004364 calculation method Methods 0.000 description 12
- PXFBZOLANLWPMH-UHFFFAOYSA-N 16-Epiaffinine Natural products C1C(C2=CC=CC=C2N2)=C2C(=O)CC2C(=CC)CN(C)C1C2CO PXFBZOLANLWPMH-UHFFFAOYSA-N 0.000 description 11
- 238000010586 diagram Methods 0.000 description 11
- 238000005457 optimization Methods 0.000 description 10
- 230000000694 effects Effects 0.000 description 8
- 210000001519 tissue Anatomy 0.000 description 8
- 206010028980 Neoplasm Diseases 0.000 description 7
- 210000000988 bone and bone Anatomy 0.000 description 7
- 210000000481 breast Anatomy 0.000 description 7
- 238000002591 computed tomography Methods 0.000 description 7
- 210000004185 liver Anatomy 0.000 description 6
- 238000013459 approach Methods 0.000 description 5
- 239000000284 extract Substances 0.000 description 5
- 201000011510 cancer Diseases 0.000 description 4
- 238000003745 diagnosis Methods 0.000 description 4
- 238000002595 magnetic resonance imaging Methods 0.000 description 4
- 230000004044 response Effects 0.000 description 4
- 238000004088 simulation Methods 0.000 description 4
- 238000000354 decomposition reaction Methods 0.000 description 3
- 230000005484 gravity Effects 0.000 description 3
- 238000013507 mapping Methods 0.000 description 3
- WZFUQSJFWNHZHM-UHFFFAOYSA-N 2-[4-[2-(2,3-dihydro-1H-inden-2-ylamino)pyrimidin-5-yl]piperazin-1-yl]-1-(2,4,6,7-tetrahydrotriazolo[4,5-c]pyridin-5-yl)ethanone Chemical class C1C(CC2=CC=CC=C12)NC1=NC=C(C=N1)N1CCN(CC1)CC(=O)N1CC2=C(CC1)NN=N2 WZFUQSJFWNHZHM-UHFFFAOYSA-N 0.000 description 2
- 208000037396 Intraductal Noninfiltrating Carcinoma Diseases 0.000 description 2
- 238000002059 diagnostic imaging Methods 0.000 description 2
- 208000028715 ductal breast carcinoma in situ Diseases 0.000 description 2
- 238000010191 image analysis Methods 0.000 description 2
- 238000012014 optical coherence tomography Methods 0.000 description 2
- 238000002600 positron emission tomography Methods 0.000 description 2
- 238000000513 principal component analysis Methods 0.000 description 2
- 210000000952 spleen Anatomy 0.000 description 2
- 210000000779 thoracic wall Anatomy 0.000 description 2
- 238000003325 tomography Methods 0.000 description 2
- NAWXUBYGYWOOIX-SFHVURJKSA-N (2s)-2-[[4-[2-(2,4-diaminoquinazolin-6-yl)ethyl]benzoyl]amino]-4-methylidenepentanedioic acid Chemical compound C1=CC2=NC(N)=NC(N)=C2C=C1CCC1=CC=C(C(=O)N[C@@H](CC(=C)C(O)=O)C(O)=O)C=C1 NAWXUBYGYWOOIX-SFHVURJKSA-N 0.000 description 1
- LDXJRKWFNNFDSA-UHFFFAOYSA-N 2-(2,4,6,7-tetrahydrotriazolo[4,5-c]pyridin-5-yl)-1-[4-[2-[[3-(trifluoromethoxy)phenyl]methylamino]pyrimidin-5-yl]piperazin-1-yl]ethanone Chemical compound C1CN(CC2=NNN=C21)CC(=O)N3CCN(CC3)C4=CN=C(N=C4)NCC5=CC(=CC=C5)OC(F)(F)F LDXJRKWFNNFDSA-UHFFFAOYSA-N 0.000 description 1
- JQMFQLVAJGZSQS-UHFFFAOYSA-N 2-[4-[2-(2,3-dihydro-1H-inden-2-ylamino)pyrimidin-5-yl]piperazin-1-yl]-N-(2-oxo-3H-1,3-benzoxazol-6-yl)acetamide Chemical compound C1C(CC2=CC=CC=C12)NC1=NC=C(C=N1)N1CCN(CC1)CC(=O)NC1=CC2=C(NC(O2)=O)C=C1 JQMFQLVAJGZSQS-UHFFFAOYSA-N 0.000 description 1
- AFCARXCZXQIEQB-UHFFFAOYSA-N N-[3-oxo-3-(2,4,6,7-tetrahydrotriazolo[4,5-c]pyridin-5-yl)propyl]-2-[[3-(trifluoromethoxy)phenyl]methylamino]pyrimidine-5-carboxamide Chemical class O=C(CCNC(=O)C=1C=NC(=NC=1)NCC1=CC(=CC=C1)OC(F)(F)F)N1CC2=C(CC1)NN=N2 AFCARXCZXQIEQB-UHFFFAOYSA-N 0.000 description 1
- 241000270295 Serpentes Species 0.000 description 1
- 230000003187 abdominal effect Effects 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 230000002308 calcification Effects 0.000 description 1
- 238000004422 calculation algorithm Methods 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000003708 edge detection Methods 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 210000003734 kidney Anatomy 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 210000004072 lung Anatomy 0.000 description 1
- 210000005075 mammary gland Anatomy 0.000 description 1
- 238000013421 nuclear magnetic resonance imaging Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000002603 single-photon emission computed tomography Methods 0.000 description 1
- 210000004872 soft tissue Anatomy 0.000 description 1
- 230000001225 therapeutic effect Effects 0.000 description 1
- 230000001131 transforming effect Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 230000002792 vascular Effects 0.000 description 1
Images
















Landscapes
- Apparatus For Radiation Diagnosis (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
Description
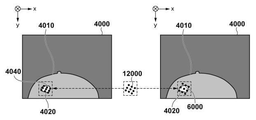
本実施形態における画像処理装置は、3次元画像である第1の画像と第2の画像の変形位置合わせを行う。このとき、硬い病変や骨などの硬くあるべき領域が関心領域として第1の画像上で与えられた場合には、画像処理装置は、関心領域を剛体として維持したまま、画像全体として整合性の取れた変形位置合わせを行う。また、画像処理装置は、剛体に限らず、全体よりも自由度が小さい変形を関心領域に適用させた変形位置合わせを行うことができる。ここで、変形位置合わせとは、第1の画像中の披検体の形状が第2の画像中の披検体の形状に合致するように第1の画像に施す変形を推定することを意味する。また、そのように第1の画像を変形させた変形画像を生成することを意味する。
ステップS2000において、データ取得部1010は、データサーバ110から、第1の画像と第2の画像を取得する。そして、データ取得部1010は、第1および第2の画像を、関心領域取得部1020、第1の変形取得部1030、第2の変形取得部1060、および表示制御部1070へと出力する。
ステップS2010において、関心領域取得部1020は、データ取得部1010から取得した画像上において、関心領域の情報(変形を抑制したい病変部等の情報)を取得する。そして、関心領域取得部1020は、取得した関心領域の情報を、対応情報生成部1050へと出力する。
ステップS2020において、第1の変形取得部1030は、データ取得部1010から取得した第1の画像と第2の画像との間の第1の変形位置合わせを実行し、第1の変形変位場を取得する。そして、第1の変形取得部1030は、取得した第1の変形変位場を対応情報生成部1050へと出力する。さらに、第1の変形取得部1030は、第1の変形変位場に基づいて第1の画像を変形させた第1の変形画像を生成して、表示制御部1070へと出力する。
ステップS2030において、対応情報生成部1050および変形近似部1040は、関心領域における第1の変形変位場よりも自由度の小さい変換モデルで近似した近似変位場を生成する。そして、対応情報生成部1050は、生成した近似変位場を、第2の変形取得部1060へと出力する。

ステップS2040において、対応情報生成部1050は、画像間における仮想的な対応情報として、関心領域上に近似変位場に基づく複数の仮想的な対応点(仮想対応情報)を生成する。本実施形態において、以下ではこれを、近似仮想対応点と称する。そして、生成した近似仮想対応点を第2の変形取得部1060へと出力する。
ステップS2050において、第2の変形取得部1060は、ステップS2040で取得した近似仮想対応点(仮想対応情報)を拘束条件として用いて、第1の画像と第2の画像との間の第2の変形位置合わせを実行する。そして、第2の変形取得部1060は、第1の画像と第2の画像との間の変形推定の結果として、生成した第2の変形変位場をデータサーバ110へと出力する。データサーバ110への出力は、不図示の出力部を用いて行われ得る。また、第2の変形取得部1060は、第2の変形変位場に基づいて第1の画像を変形させた第2の変形画像を生成して、表示制御部1070へと出力する。
ステップS2060において、表示制御部1070は、ユーザによる不図示の操作部への操作に応じて、取得した変形画像と第2の画像の断面画像を、表示部120へと表示する制御を行う。このとき、表示制御部1070は、変形画像として、第1の変形変位場に基づく第1の変形画像と、第2の変形変位場に基づく第2の変形画像と、第2の画像の同一断面を、並べて表示するように構成することができる。また、表示制御部1070は、第1の変形画像と第2の変形画像を、ユーザの操作に応じて、1つの表示画面領域内で切り替えて表示するように制御を行ってもよい。なお、表示制御部1070は、第1の変形画像の生成や表示を行わなくてもよい。以上が、本実施形態における画像処理装置100の処理の説明である。
第1の実施形態では、ステップS2030で関心領域の変形を近似する近似変換モデルとして、剛体変換を適用していたが、近似変換モデルは、第1の変形よりも自由度が小さければどのようなモデルであってもよい。例えば、変形近似部1040は、アフィン変換によって第1の変形を近似してもよい。
第1の実施形態では、ステップS2050において、近似仮想対応点を構成する各対応点間の位置関係が一致する拘束条件を、第2の評価関数E2(Φ)に適用した。しかし、第2の評価関数E2(Φ)に追加する拘束条件は、必ずしもこれに限定されない。
第1の実施形態では、ステップS2040およびステップS2050で利用する画像間における仮想対応情報として、仮想的な対応点を適用していた。しかし、利用する仮想対応情報は、必ずしも対応点ではなくてもよい。
関心領域の輪郭形状を近似変換モデルが表す形状に保つような変形を推定できる。
第1の実施形態では、ステップS2030で生成する変形仮想対応点と、ステップS2040で生成する近似仮想対応点は、第1の画像上の同じ代表点から生成するものであった。しかし、それらは同じ代表点から生成されるものである必要はなく、変形仮想対応点と近似仮想対応点とが別々の代表点から生成されるものであってもよい。例えば、変形仮想対応点に関しては、関心領域を囲む所定範囲内(周囲5mm以内)の領域上に設定された代表点から生成し、近似仮想対応点に関しては、厳密に関心領域上に設定された代表点から生成する方法を採ってもよい。これにより、第2の変形において、関心領域の周囲の領域により整合した近似変換成分を抽出でき、かつ厳密に関心領域に対してのみ形状を維持させる拘束条件を与えることができる。
第1の実施形態では、ステップS2050における第2の評価関数E2(Φ)は、(3)式に示すように第1の評価関数E1(Φ)を用いていた。しかし、ステップS2050で、第1の評価関数E1(Φ)を必ずしも用いる必要はない。例えば、ステップS2050では、より多くの計算コストを要して高精度な評価を行う評価関数を、E1(Φ)として用いるようにしてもよい。例えば、第1の変形推定ではランドマーク対応点位置の誤差をE1(Φ)として用いて、第2の変形推定では画像全体の画像類似度をE1(Φ)として用いるようにできる。これは、第1の変形推定は近似変形場を求めるための中間処理に過ぎないが、第2の変形推定は位置合わせの結果を得ることを目的としているからである。
第1の実施形態では、ステップS2050の第2の変形における変換モデルは、ステップS2020における第1の変形と同じ変形モデルを用いていた。しかし、関心領域の周囲の近似変換成分が第1の変形と類似する結果になるのであれば、第2の変形で利用する変換モデルは、必ずしもステップS2020と一致する必要はない。
第1の実施形態では、予め定められた近似変換モデルを用いて関心領域の第1の変形を近似していた。しかし、関心領域の性質に応じて適応的に近似変換モデルを選択できるようにしてもよい。本実施形態における画像処理装置は、関心領域に対応する部位(臓器や病変等)の種類に応じて適切な近似変換モデルを選択し、選択された近似変換モデルを用いて関心領域の第1の変形を近似する。これにより、予め定められた近似変換モデルが使用されることで、本来関心領域の変形とは異なる性質の近似変換モデルが適用されてしまい、位置合わせ精度が低下することを防ぐことができる。以下、本実施形態における画像処理装置について、第1の実施形態との相違部分について説明する。
ステップS9010において、関心領域取得部1020は、データ取得部1010から取得した画像上において、変形を抑制したい関心領域を表す情報を取得し、該関心領域に対応する部位の種類を分類(識別)する。そして、取得された関心領域とその分類情報を近似変換モデル選択部8000へ出力する。
ステップS9015において、近似変換モデル選択部8000は、関心領域に対応する臓器の種類や性質に応じて、近似変換モデルの種類を選択する。例えば、近似変換モデル選択部8000は、骨に分類された領域には剛体変換モデルを適用し、肝臓に分類された領域には体積保存のアフィン変換モデルを適用することができる。なお、関心領域が複数存在する場合には、近似変換モデル選択部8000は、これらの処理を夫々の関心領域に対して実行する。また、近似変換モデル選択部8000は、「硬癌」には剛体変換モデル、「良性腫瘍」には体積保存のアフィン変換モデル、「DCIS」や「不明」には「近似なし」を適用することができる。なお、近似変換モデル選択部8000は、「近似なし」を適用した関心領域については、以降の近似処理を行う処理の対象から除外することができる。そして、近似変換モデル選択部8000は、選択した近似変換モデルの種類を、対応情報生成部1050へ出力する。
ステップS9030において、変形近似部1040は、関心領域における第1の変形変位場を、この変位場よりも自由度の小さい、近似変換モデル選択部8000から取得した近似変換モデルで近似した近似変位場を生成する。そして、変形近似部1040は、生成した近似変位場を、第2の対応情報生成部1050へと出力する。
第1の実施形態では、関心領域の第1の変形を自由度が小さい近似変換で近似して得た仮想的な対応情報を、そのまま第2の変形位置合わせの位置合わせ指標として利用していた。しかし、近似変換から得た仮想的な対応情報を直接、第2の変形位置合わせの位置合わせ指標として利用しなくてもよい。本実施形態では、第1の変形から得た仮想的な対応情報と、近似変換から得た仮想的な対応情報と、の間に位置する中間的な対応情報を、第2の変形位置合わせの位置合わせ指標として利用する。以下、本実施形態における画像処理装置について、第1の実施形態との相違部分について説明する。
ステップS11025において、表示制御部1070は、ユーザによる不図示の操作部への操作に応じて、取得した第1の変形画像と第2の画像の断面画像を、表示部120へと表示する制御を行う。このとき、表示制御部1070は、第1の変形画像と第2の画像の同一断面を、並べて表示部120へ表示するように制御することができる。
ステップS11030において、形状維持度取得部10010は、ユーザが不図示の操作部から入力した形状維持度を取得する。そして、取得した形状維持度の値を、対応情報生成部1050および表示制御部1070へと出力する。
ステップS11040において、形状維持度取得部10010は、形状維持度の値λRが0か否かを判定する。そして、λR≠0の場合は、処理はステップS11050へ進む。一方、λR=0の場合は、処理はステップS11100へ進む。これにより、形状維持度λRが0以外の場合は、画像処理装置1000は、ステップS11050からS11090の処理により、形状維持度の値λRに基づいて関心領域の形状が維持された第2の変形画像を最終的な位置合わせ結果として取得できる。一方、λRが0の場合は関心領域の形状を維持する必要がないため、画像処理装置1000は、ステップS11020で生成された第1の変形画像をそのまま最終的な位置合わせ結果として取得できる。これにより、不要に第2の画像を生成する処理を削減でき、全体の処理フローを効率化することができる。
ステップS11070において、形状維持度取得部10010は、形状維持度の値λRが1か否かを判定する。そして、λR≠1の場合は、処理はステップS11080へ進む。一方、λR=1の場合は、処理はステップS11090へ進む。これにより、λRが1以外の場合は、画像処理装置1000は、ステップS11080の処理によって中間仮想対応点を生成し、ステップS11090においてそれを仮想対応点位置の誤差項に適用して位置合わせした第2の変形画像を最終的な位置合わせ結果として取得できる。一方、λRが1の場合は、画像処理装置1000は、ステップS11060で生成した近似仮想対応点を、そのままステップS11090における仮想対応点位置の誤差項に適用して位置合わせした第2の変形画像を最終的な位置合わせ結果として取得できる。従って、不要に中間仮想対応点を生成する処理を削減でき、全体の処理フローを効率化することができる。
ステップS11080において、対応情報生成部1050は、形状維持度取得部10010から取得した形状維持度の値λRに基づき、関心領域DROI上の変形仮想対応点と近似仮想対応点の間に位置する中間仮想対応点を生成する。そして、対応情報生成部1050は、生成した中間仮想対応点を第2の変形取得部1060へと出力する。
ステップS11090において、第2の変形取得部1060は、取得した仮想対応点に基づき、データ取得部1010から取得した第1の画像を第2の画像に対して変形位置合わせする。第1実施形態のステップS2050で用いる仮想対応点が近似仮想対応点に限定されていたのに対し、本実施形態では、近似仮想対応点と中間仮想対応点の何れかの仮想対応点を用いる点が異なる。すなわち、λR=1の場合はステップS11060で生成した近似仮想対応点を用い、λR≠1の場合はステップS11080で生成した近似仮想対応点を用いる。但し、取得された仮想対応点に基づく変形位置合わせ処理に関しては、ステップS2050と同様であるため、詳細な説明は省略する。
ステップS11110において、表示制御部1070は、ユーザによる不図示の操作部から処理を終了するか否かの命令を取得する。そして、命令“終了する”を取得した場合には、処理は終了、命令“終了しない”を取得した場合には、処理はステップS11030へ進み、ユーザによる入力待ちの状態が維持される。これにより、ユーザがステップS11100において位置合わせ結果として第1の変形画像または第2の変形画像を観察した結果、位置合わせを完了したと判断した場合には、不図示の操作部を通じて命令“終了する”を与えることで、画像処理装置1000は処理を終了できる。一方、ユーザが位置合わせ結果の画像を観察した結果、形状維持度を変更して再度結果を観察したいと考えた場合には、不図示の操作部を通じて命令“終了しない”を与えることで、画像処理装置1000は、再度、新たな形状維持度を与えて位置合わせ結果を生成し表示させることができる。
第3の実施形態では、ステップS11080において、中間仮想対応点を構成する中間代表点を、変形代表点と近似代表点とを結ぶ線分上の点としていた。言い換えると、変形代表点と近似代表点の座標間を線形補間した座標としていた。しかし、中間代表点の生成方法はこれに限られるものではなく、変形代表点と近似代表点の座標間を非線形に補間した座標としてもよい。すなわち、関心領域に関しての第1の変形変位場から第2の変形変位場への変化は線形であっても、非線形であってもよい。
第3の実施形態では、ステップS11030において、形状維持度取得部10010は、形状維持度を1つだけ取得した。そして、ステップS11040からS11090を経て、その値に対応する変形画像を1つだけ生成されていた。また、必要であれば、形状維持度を再取得しそれに対応する変形画像を取得する、という処理を繰り返していた。しかしながら、形状維持度取得部10010は、形状維持度の値を1度に複数取得し、それに対応する変形画像を1度に複数生成されるようにしてもよい。
第1の実施形態では、位置合わせの評価関数の例として、ランドマーク対応点位置の誤差を採用していた。しかし、評価関数には、予め1対1に対応する点として取得されない情報の誤差を含むようにしてもよい。本実施形態における画像処理装置は、夫々の画像から抽出した被検体の表面形状の情報に基づいて、ある変換パラメータに対する画像間での表面形状の一致度を求め、これを評価関数の誤差項として併用する。これにより、表面形状が一致するような変換パラメータを算出することができる。以下、本実施形態における画像処理装置について、第1の実施形態との相違部分について説明する。
ステップS14015において、表面形状取得部13010は、データ取得部1010から取得した第1の画像と第2の画像の夫々において、被検体の表面形状を表す情報を取得する。ここで、被検体の表面とは、例えば、被検体が乳房の場合には、体表や大胸筋面である。また、被検体が肝臓や腎臓などの臓器の場合には、表面とは当該臓器の表面のことである。ここで、表面形状は、例えば画像に対して面強調フィルタやエッジ検出等の画像処理を行うことで自動的に取得するようにできる。また、画像をユーザが観察できるようにして、ユーザによる入力操作等に基づいて表面形状を取得するようにしてもよい。取得した第1の画像および第2の画像の表面形状を夫々、第1の表面形状および第2の表面形状と表記する。本実施例では表面形状は点群により構成される。但し、表面形状は必ずしも点群である必要はなく、形状を表現できる形式であれば何であってもよい。例えば、表面形状は、多項式などの曲面を表現可能な数式で近似された関数(以降、曲面関数と称する)であってもよい。そして、取得された第1の表面形状および第2の表面形状を第1の変形取得部1030及び第2の変形取得部1060へと出力する。
ステップS14020において、第1の変形取得部1030は、取得した第1の表面形状および第2の表面形状に基づき、取得した第1の画像と第2の画像との間の第1の変形位置合わせを実行し、第1の変形変位場を取得する。そして、第1の変形取得部1030は、取得した第1の変形変位場を対応情報生成部1050へと出力する。さらに、第1の変形取得部1030は、第1の変形変位場に基づいて第1の画像を変形させた第1の変形画像を生成して、表示制御部1070へと出力する。
ステップS14050において、第2の変形取得部1060は、ステップS2040で取得した近似仮想対応点(仮想対応情報)を拘束条件として用いて第2の変形変位場を取得する。このとき、第2の評価関数E2(Φ)の算出において、ステップS14020の処理と同様に、ステップS14015で取得した第1の表面形状および第2の表面形状の一致度を考慮する点が第1の実施形態とは異なっている。ここで、第2の評価関数E2(Φ)の算出において、第1の評価関数E1(Φ)に追加される近似仮想対応点の誤差項R(Φ)も対応点位置の誤差項である。従って、最終的な位置合わせの評価関数E2(Φ)も対応点位置の誤差項のみで表わされるため、変換パラメータと対応点間の誤差との関係を線形方程式で表わすことができる。従って、対応点間の誤差を最小化する変換パラメータp2を線形最適化手法によって推定できる。
上記の実施形態では、第1の実施形態から第3の実施形態と同様に、関心領域の変形を制御するための第2の変形を取得していた。しかし、関心領域の変形を制御しない(制御する必要がない)場合であっても、被検体の表面形状を一致させるための処理を位置合わせに用いる上記処理の効果は損なわれるものではない。すなわち、ステップS14010、および、S14030からステップS14050の処理は実行せずに、第1の変形を変形結果として用いるようにしてもよい。
上述の第4の実施形態の変形例4−1では、被検体の表面形状に基づき、画像間の表面形状の一致度を、位置合わせの評価関数の誤差項として用いる場合について説明した。しかし、これらの実施形態は本発明の実施のおける一例に過ぎない。本実施形態では変形例4−1とは異なる形態の例について説明する。
ステップS15000において、データ取得部1010は、データサーバ110から、第1の画像と第2の画像を取得する。この処理は第4の実施形態におけるステップS14000と同様であるため説明を省略する。
ステップS15015において、表面形状取得部13010は、データ取得部1010から取得した第1の画像と第2の画像の夫々において、被検体の表面形状を表す情報を取得する。この処理は第4の実施形態におけるステップS14015と同様であるため説明を省略する。
ステップS15020において、第1の変形取得部1030は、取得した第1の表面形状および第2の表面形状に基づき、取得した第1の画像と第2の画像との間の第1の変形位置合わせを実行し、第1の変形変位場を取得する。さらに、第1の変形取得部1030は、第1の変形変位場に基づいて第1の画像を変形させた第1の変形画像を生成して、表示制御部1070へと出力する。
ステップS15022において、第1の変形取得部1030は、第1の表面形状および第2の表面形状を構成する点群の間の対応付け処理を実行する。具体的な処理方法は、第4の実施形態におけるステップS14020に一例として記載したICP法などを用いることができる。この処理により、表面対応点(xS1i,xS2i)、1≦i≦NSを取得する。ここで、NSは表面対応点の総数である。
ステップS15024において、第1の変形取得部1030は、ステップS15022で取得した表面対応点の夫々について、当該位置における表面形状に関する法線方向の算出処理を実行する。ここで、表面対応点(xS1i,xS2i)を構成するxS1iおよびxS2iは、夫々、第1の表面形状および第2の表面形状を構成する点である。本処理ステップでは、位置xS1iにおける第1の表面形状の法線方向を表すベクトル(第1の法線ベクトル)n1iおよび、位置xS2iにおける第2の表面形状の法線方向を表すベクトル(第2の法線ベクトル)n2iを夫々算出して取得する。表面形状から法線ベクトルを算出する方法は、変形例1−2に記載した方法(当該位置の近傍の点群の位置を主成分分析して得る方法)で算出できる。法線ベクトルの算出方法は、他にも表面形状の距離場を算出し、その距離場の空間勾配に基づいて法線ベクトルを算出するようにしても良い。以上の方法により得た第1の表面形状の位置xS1iにおける法線ベクトルn1iおよび、第2の表面形状の位置xS2iにおける法線ベクトルn2iを得る。なお、n1iおよびn2iは夫々、ノルムが1.0に正規化された3次元ベクトルである。
ステップS15026において第1の変形取得部1030は、ステップS15022およびステップS15024の処理結果に基づいて、第1の変形変位場を取得する。
ステップS15028において第1の変形取得部1030は、ステップS15026で取得した第1の変形変位場に基づいて第1の画像を変形させた第1の変形画像を生成して、表示制御部1070へと出力する。
ステップS15060において、表示制御部1087は、ユーザによる不図示の操作部への操作に応じて、取得した変形画像と第2の画像の断面画像を、表示部120へと表示する制御を行う。この処理は第4の実施形態におけるステップS14060と同様であるため詳細な説明を省略する。
上記の実施形態では、第1の表面形状に基づいて第1の法線ベクトルを算出する場合を例として説明した。しかし、本発明の実施はこれに限らない。例えば、第1の法線ベクトルn1iは、第1の画像の表面対応点位置xS1iの近傍の輝度勾配に基づいて算出するようにしても良い。同様に、第2の法線ベクトルn2iは第2の画像の表面対応点位置xS2iの近傍の輝度勾配に基づいて算出するようにしても良い。表面形状を表す点群の分布が空間的に疎な場合など、表面形状に関する情報から法線ベクトルを高精度に算出するのが困難な場合であっても以降の処理を実行することができる。
上記の実施形態では、第1の法線ベクトルおよび第2の法線ベクトルを算出し、それらに基づいて式(10)に記載した評価関数を用いる場合を例として説明した。しかし、本発明の実施はこれに限らない。例えば、第1の法線ベクトルおよび第2の法線ベクトルの双方に基づいて、これらを統合した法線ベクトルを算出するようにしても良い。そして、統合した法線ベクトルに基づいて第4の実施形態で説明した式(9)に記載した評価関数を用いて第1の変形変換を取得するようにしても良い。具体的には、ステップS15015で取得した第1の画像の座標系で定義される第1の法線ベクトルを座標変換Φ(x|p1)に基づいて、第2の画像座標系の法線ベクトルへと変換する。より具体的にはn1i’=Φ(x1i+n1i|p1)−Φ(x1i|p1)により法線ベクトルを計算する。そして、n1i’とn2iから中間ベクトルnmiを算出する。そして、第4の実施形態のステップS14020で説明した方法により共分散行列Cov(x)を算出し、同実施形態の式(9)に記載し評価関数を用いて第1の変形変位場を取得するようにできる。以上に説明した方法によれば、式(10)を用いる第6の実施形態に記載の方法に比べて、より簡易な計算により本発明を実施することができる。
第6の実施形態では、式(10)に示す通り、第1の法線ベクトルに基づいて算出される評価値と、第2の法線ベクトルに基づいて算出される評価値との合算により全体の評価値を計算する場合を例として説明した。しかし本発明の実施はこれに限らない。例えば、式(11)に示すようにして評価関数を構成するようにしても良い。
本発明は、上述の実施形態の1以上の機能を実現するプログラムを、ネットワーク又は記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータにおける1つ以上のプロセッサーがプログラムを読出し実行する処理でも実現可能である。また、1以上の機能を実現する回路(例えば、ASIC)によっても実現可能である。
Claims (19)
- 被検体を異なる条件で撮像することにより得られた第1の画像と第2の画像を取得するデータ取得手段と、
前記第1の画像内の関心領域を取得する関心領域取得手段と、
前記第1の画像と前記第2の画像の間の第1の変形変位場を取得する第1の変形取得手段と、
前記関心領域における前記第1の変形変位場を、前記第1の変形変位場より自由度が少ない近似変換モデルを用いて近似して近似変位場を生成する変形近似手段と、
前記関心領域に関して、前記第1の画像と、前記第1の画像が前記近似変位場に基づいて変位される画像との間の対応情報を生成する対応情報生成手段と、
前記対応情報を用いて、前記第1の画像と前記第2の画像の間の第2の変形変位場を取得する第2の変形取得手段と、
を備えることを特徴とする画像処理装置。 - 前記第1の変形取得手段は、前記第1の変形変位場に基づいて、前記第1の画像を変位させた第1の変形画像を生成し、
前記第2の変形取得手段は、前記第2の変形変位場に基づいて、前記第1の画像を変位させた第2の変形画像を生成することを特徴とする請求項1に記載の画像処理装置。 - 前記対応情報は、前記関心領域上に設定された複数の代表点と、該代表点の夫々を前記近似変位場を用いて変位させた複数の代表点とに基づいて取得される、仮想的な対応点であることを特徴とする請求項2に記載の画像処理装置。
- 前記第2の変形取得手段は、前記設定された複数の代表点と、前記変位させた複数の代表点の何れか一方を変位させて、前記設定された複数の代表点と前記変位させた複数の代表点との位置関係を一致させるように前記第2の変形変位場を取得することを特徴とする請求項3に記載の画像処理装置。
- 前記変位させた複数の代表点は、前記関心領域の面上に沿って動くことが許容されることを特徴とする請求項3に記載の画像処理装置。
- 前記対応情報は、前記関心領域上に設定された領域と、該設定された領域を前記近似変位場を用いて変位させた領域とに基づいて取得される、仮想的な形状であることを特徴とする請求項2に記載の画像処理装置。
- 前記関心領域の性質に応じて、前記近似変位場を生成するために用いられる近似変換モデルを選択する近似変換モデル選択手段を更に備えることを特徴とする請求項1から6のいずれか1項に記載の画像処理装置。
- 前記関心領域が複数存在する場合は、前記近似変換モデル選択手段は、それぞれの前記関心領域の性質に応じて、前記近似変位場を生成するために用いられる近似変換モデルを選択することを特徴とする請求項7に記載の画像処理装置。
- 前記関心領域に関しての前記第1の変形変位場から前記第2の変形変位場への変化の程度を示す形状維持度を取得する形状維持度取得手段を更に備え、
前記対応情報生成手段は、前記第1の画像と、前記第1の画像が前記近似変位場と前記形状維持度とに基づいて変位される画像との間の対応情報を生成することを特徴とする請求項1から8のいずれか1項に記載の画像処理装置。 - 前記関心領域に関しての前記第1の変形変位場から前記第2の変形変位場への変化は線形であることを特徴とする請求項9に記載の画像処理装置。
- 前記関心領域に関しての前記第1の変形変位場から前記第2の変形変位場への変化は非線形であることを特徴とする請求項9に記載の画像処理装置。
- 前記第1の変形変位場は、前記第1の画像と前記第2の画像との間で実際に対応する実対応点の位置の誤差の評価に基づいて算出され、
前記第2の変形変位場は、前記実対応点の位置の誤差と前記仮想的な対応点の位置の誤差の評価とに基づいて算出されることを特徴とする請求項3に記載の画像処理装置。 - 前記第1の画像に描出された前記被検体の第1の表面形状を取得し、前記第2の画像に描出された該被検体の第2の表面形状を取得する表面形状取得手段をさらに備え、
前記実対応点は、前記第1の表面形状と前記第2の表面形状との間で対応する表面対応点であることを特徴とする請求項12に記載の画像処理装置。 - 前記実対応点の位置の誤差の評価は、前記第1の表面形状と前記第2の表面形状の何れか一方の曲面の法線方向の位置の誤差は大きく評価し、該曲面に沿った方向の位置の誤差は小さく評価することを特徴とする請求項13に記載の画像処理装置。
- 前記近似変換モデルは剛体変換モデルであることを特徴とする請求項1から14のいずれか1項に記載の画像処理装置。
- 前記関心領域取得手段は、ユーザによる操作に基づいて前記関心領域を取得することを特徴とする請求項1から15のいずれか1項に記載の画像処理装置。
- 前記第1の変形画像と前記第2の変形画像を表示部に表示させるための制御を行う表示制御手段を更に備えることを特徴とする請求項2から6のいずれか1項に記載の画像処理装置。
- 被検体を異なる条件で撮像することにより得られた第1の画像と第2の画像を取得するデータ取得工程と、
前記第1の画像内の関心領域を取得する関心領域取得工程と、
前記第1の画像と前記第2の画像の間の第1の変形変位場を取得する第1の変形取得工程と、
前記関心領域における前記第1の変形変位場を、前記第1の変形変位場より自由度が少ない近似変換モデルを用いて近似して近似変位場を生成する変形近似工程と、
前記関心領域に関して、前記第1の画像と、前記第1の画像が前記近似変位場に基づいて変位される画像との間の対応情報を生成する対応情報生成工程と、
前記対応情報を用いて、前記第1の画像と前記第2の画像の間の第2の変形変位場を取得する第2の変形取得工程と、
を備えることを特徴とする画像処理方法。 - コンピュータを、請求項1から17のいずれか1項に記載の画像処理装置として機能させるためのプログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP18191466.4A EP3444781B1 (en) | 2016-01-15 | 2016-12-29 | Image processing apparatus and image processing method |
| EP16002762.9A EP3206189B1 (en) | 2016-01-15 | 2016-12-29 | Image processing apparatus, image processing method, and program |
| US15/400,074 US10417777B2 (en) | 2016-01-15 | 2017-01-06 | Image processing apparatus, image processing method, and non-transitory computer-readable storage medium |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016006556 | 2016-01-15 | ||
| JP2016006556 | 2016-01-15 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017127623A JP2017127623A (ja) | 2017-07-27 |
| JP2017127623A5 JP2017127623A5 (ja) | 2019-11-07 |
| JP6905323B2 true JP6905323B2 (ja) | 2021-07-21 |
Family
ID=59394203
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016207259A Active JP6905323B2 (ja) | 2016-01-15 | 2016-10-21 | 画像処理装置、画像処理方法、およびプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6905323B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7179521B2 (ja) * | 2018-08-02 | 2022-11-29 | キヤノンメディカルシステムズ株式会社 | 医用画像処理装置、画像生成方法、及び画像生成プログラム |
| EP3903281A4 (en) * | 2018-12-28 | 2022-09-07 | Activ Surgical, Inc. | GENERATION OF A SYNTHETIC THREE-DIMENSIONAL IMAGE FROM PARTIAL DEPTH MAPS |
| DE102019109789A1 (de) * | 2019-04-12 | 2020-10-15 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Verfahren und Computerprogramm zum zeitaufgelösten Berechnen einer Deformation eines Körpers |
| CN114111610A (zh) * | 2020-08-26 | 2022-03-01 | Ykk株式会社 | 动态地测量被输送的织物的变形量的方法及计算机系统 |
| CN114187338B (zh) * | 2021-12-08 | 2023-04-28 | 卡本(深圳)医疗器械有限公司 | 一种基于估算2d位移场的器官形变配准方法 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7239321B2 (en) * | 2003-08-26 | 2007-07-03 | Speech Graphics, Inc. | Static and dynamic 3-D human face reconstruction |
| WO2005059831A1 (en) * | 2003-12-11 | 2005-06-30 | Philips Intellectual Property & Standards Gmbh | Elastic image registration |
| JP5159301B2 (ja) * | 2007-12-28 | 2013-03-06 | 株式会社東芝 | 医用画像表示装置および画像表示方法 |
| GB0913930D0 (en) * | 2009-08-07 | 2009-09-16 | Ucl Business Plc | Apparatus and method for registering two medical images |
| JP5586917B2 (ja) * | 2009-10-27 | 2014-09-10 | キヤノン株式会社 | 情報処理装置、情報処理方法およびプログラム |
| US8675944B2 (en) * | 2012-01-12 | 2014-03-18 | Kabushiki Kaisha Toshiba | Method of registering image data |
| US9384555B2 (en) * | 2012-07-02 | 2016-07-05 | Kabushiki Kaisha Toshiba | Motion correction apparatus and method |
| CN104603836A (zh) * | 2012-08-06 | 2015-05-06 | 范德比尔特大学 | 用于在图像引导手术期间校正数据变形的改进的方法 |
| CN103854276B (zh) * | 2012-12-04 | 2018-02-09 | 东芝医疗系统株式会社 | 图像配准及分割装置和方法,以及医学图像设备 |
| US20160117797A1 (en) * | 2013-06-06 | 2016-04-28 | Hitachi, Ltd. | Image Processing Apparatus and Image Processing Method |
| US9547894B2 (en) * | 2013-10-08 | 2017-01-17 | Toshiba Medical Systems Corporation | Apparatus for, and method of, processing volumetric medical image data |
| JP6182045B2 (ja) * | 2013-10-11 | 2017-08-16 | キヤノン株式会社 | 画像処理装置およびその方法 |
| JP6208535B2 (ja) * | 2013-10-25 | 2017-10-04 | 株式会社日立製作所 | 放射線治療装置およびシステムおよび方法 |
-
2016
- 2016-10-21 JP JP2016207259A patent/JP6905323B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017127623A (ja) | 2017-07-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3206189B1 (en) | Image processing apparatus, image processing method, and program | |
| EP3625768B1 (en) | Determining a clinical target volume | |
| JP6905323B2 (ja) | 画像処理装置、画像処理方法、およびプログラム | |
| JP6598452B2 (ja) | 医用画像処理装置及び医用画像処理方法 | |
| EP1695287B1 (en) | Elastic image registration | |
| Wang et al. | A review of deformation models in medical image registration | |
| JP7214434B2 (ja) | 医用画像処理装置及び医用画像処理プログラム | |
| JP2011092263A (ja) | 情報処理装置、情報処理方法およびプログラム | |
| Chartrand et al. | Semi-automated liver CT segmentation using Laplacian meshes | |
| EP2186058A2 (en) | Anatomically constrained image registration | |
| US20230260129A1 (en) | Constrained object correction for a segmented image | |
| EP3424017A1 (en) | Automatic detection of an artifact in patient image data | |
| JP6747785B2 (ja) | 医用画像処理装置及び医用画像処理方法 | |
| JP6934734B2 (ja) | 画像処理装置、画像処理装置の制御方法およびプログラム | |
| JP6827707B2 (ja) | 情報処理装置および情報処理システム | |
| Duan et al. | Surface function actives | |
| US10832423B1 (en) | Optimizing an atlas | |
| JP2022052210A (ja) | 情報処理装置、情報処理方法及びプログラム | |
| Maris et al. | Deformable surface registration for breast tumors tracking: a phantom study | |
| Mihaylova | Segmentation of Spleen with Pathology from abdominal MRI | |
| JP2017080157A (ja) | 画像処理装置 | |
| JP2022111706A (ja) | 画像処理装置および画像処理方法、医用撮像装置、プログラム | |
| Almeida et al. | 3D shape prior active contours for an automatic segmentation of a patient specific femur from a CT scan | |
| Kouamé | Mapping Endometrial Implants by Registering Transvaginal Ultrasound to Pelvic Magnetic Resonance Images |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190920 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190920 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201014 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201106 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201202 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20210103 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210113 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210215 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210316 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210528 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210625 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6905323 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |