JP6901481B2 - 増大した無線チャネル・スループットを有する磁気共鳴(mr)システム及び該システムの動作方法 - Google Patents
増大した無線チャネル・スループットを有する磁気共鳴(mr)システム及び該システムの動作方法 Download PDFInfo
- Publication number
- JP6901481B2 JP6901481B2 JP2018528060A JP2018528060A JP6901481B2 JP 6901481 B2 JP6901481 B2 JP 6901481B2 JP 2018528060 A JP2018528060 A JP 2018528060A JP 2018528060 A JP2018528060 A JP 2018528060A JP 6901481 B2 JP6901481 B2 JP 6901481B2
- Authority
- JP
- Japan
- Prior art keywords
- antenna
- coil
- antennas
- radio
- transmission method
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000001965 increasing effect Effects 0.000 title description 4
- 238000000034 method Methods 0.000 claims description 248
- 230000006854 communication Effects 0.000 claims description 163
- 238000004891 communication Methods 0.000 claims description 163
- 230000005540 biological transmission Effects 0.000 claims description 91
- 230000015654 memory Effects 0.000 claims description 42
- 238000004590 computer program Methods 0.000 claims description 13
- 230000001939 inductive effect Effects 0.000 claims description 7
- 230000008569 process Effects 0.000 description 73
- 241000257303 Hymenoptera Species 0.000 description 14
- 230000008878 coupling Effects 0.000 description 13
- 238000010168 coupling process Methods 0.000 description 13
- 238000005859 coupling reaction Methods 0.000 description 13
- 238000012545 processing Methods 0.000 description 13
- 238000012546 transfer Methods 0.000 description 12
- 238000003384 imaging method Methods 0.000 description 9
- 230000026676 system process Effects 0.000 description 9
- 210000003127 knee Anatomy 0.000 description 8
- 238000012937 correction Methods 0.000 description 5
- 230000004044 response Effects 0.000 description 5
- 101710148586 ADP,ATP carrier protein 1 Proteins 0.000 description 4
- 101710111394 ADP,ATP carrier protein 1, mitochondrial Proteins 0.000 description 4
- 101710102716 ADP/ATP translocase 1 Proteins 0.000 description 4
- 102100032533 ADP/ATP translocase 1 Human genes 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- LPEPZBJOKDYZAD-UHFFFAOYSA-N flufenamic acid Chemical compound OC(=O)C1=CC=CC=C1NC1=CC=CC(C(F)(F)F)=C1 LPEPZBJOKDYZAD-UHFFFAOYSA-N 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 210000003423 ankle Anatomy 0.000 description 3
- 230000008901 benefit Effects 0.000 description 3
- 230000001276 controlling effect Effects 0.000 description 3
- 230000005284 excitation Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000009877 rendering Methods 0.000 description 3
- 101710148588 ADP,ATP carrier protein 2 Proteins 0.000 description 2
- 101710165307 ADP,ATP carrier protein 2, mitochondrial Proteins 0.000 description 2
- 101710102718 ADP/ATP translocase 2 Proteins 0.000 description 2
- 102100026396 ADP/ATP translocase 2 Human genes 0.000 description 2
- 101710102715 ADP/ATP translocase 3 Proteins 0.000 description 2
- 238000003491 array Methods 0.000 description 2
- 230000002457 bidirectional effect Effects 0.000 description 2
- 230000001934 delay Effects 0.000 description 2
- 238000009826 distribution Methods 0.000 description 2
- 230000033001 locomotion Effects 0.000 description 2
- 239000011159 matrix material Substances 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 241001673391 Entandrophragma candollei Species 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000007175 bidirectional communication Effects 0.000 description 1
- 230000000747 cardiac effect Effects 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- NUHSROFQTUXZQQ-UHFFFAOYSA-N isopentenyl diphosphate Chemical compound CC(=C)CCO[P@](O)(=O)OP(O)(O)=O NUHSROFQTUXZQQ-UHFFFAOYSA-N 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000002610 neuroimaging Methods 0.000 description 1
- 238000004806 packaging method and process Methods 0.000 description 1
- 230000037361 pathway Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/32—Excitation or detection systems, e.g. using radio frequency signals
- G01R33/36—Electrical details, e.g. matching or coupling of the coil to the receiver
- G01R33/3692—Electrical details, e.g. matching or coupling of the coil to the receiver involving signal transmission without using electrically conductive connections, e.g. wireless communication or optical communication of the MR signal or an auxiliary signal other than the MR signal
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/32—Excitation or detection systems, e.g. using radio frequency signals
- G01R33/34—Constructional details, e.g. resonators, specially adapted to MR
- G01R33/341—Constructional details, e.g. resonators, specially adapted to MR comprising surface coils
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/32—Excitation or detection systems, e.g. using radio frequency signals
- G01R33/36—Electrical details, e.g. matching or coupling of the coil to the receiver
- G01R33/3642—Mutual coupling or decoupling of multiple coils, e.g. decoupling of a receive coil from a transmission coil, or intentional coupling of RF coils, e.g. for RF magnetic field amplification
-
- H04B5/26—
-
- H04B5/72—
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B7/00—Radio transmission systems, i.e. using radiation field
- H04B7/02—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas
- H04B7/04—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas using two or more spaced independent antennas
- H04B7/06—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas using two or more spaced independent antennas at the transmitting station
- H04B7/0686—Hybrid systems, i.e. switching and simultaneous transmission
- H04B7/0689—Hybrid systems, i.e. switching and simultaneous transmission using different transmission schemes, at least one of them being a diversity transmission scheme
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Signal Processing (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
- Power Engineering (AREA)
Description

a)語「備える(comprising)」は、所与の請求項に記載された要素又はステップ以外の要素又はステップの存在を排除しない。
b)要素の前の語「a」又は「an」は、そのような要素が複数存在することを排除しない。
c)請求項中の参照符号は、その請求項の範囲を限定しない。
d)同じアイテムによって、又はハードウェア若しくはソフトウェアで実施された同じ構造若しくは機能によって、いくつかの「手段」が表現されることがある。
e)開示された要素は、ハードウェア部分(例えば別々の電子回路及び集積電子回路を含む)、ソフトウェア部分(例えばコンピュータ・プログラミング)、及びこれらの任意の組合せからなることがある。
f)ハードウェア部分は、アナログ部分とディジタル部分のうちの一方又は両方からなることがある。
g)特段の記載なしに、開示された装置又は開示された装置の部分が、一体に結合されたり、又はさらなる部分に分離されたりすることがある。
h)特段の言及がない限り、ステップ又はステップの特定の順序が必須となることは意図されていない。
i)用語「複数の」要素は、記載された2つ以上の要素を含み、特定の要素数範囲を暗示しない。すなわち、複数の要素は、2つの要素でしかなくてもよく、計り知れない数の要素を含んでもよい。
j)用語「及び/又は」並びにその形式素は、特許請求の範囲及び本発明のシステムの1つ又は複数の実施形態に従って、列挙された要素のうちの1つ又は複数の要素だけがシステム内に適切に存在すればよいことを意味すると理解すべきである。
Claims (15)
- 誘導磁気共鳴信号を受信するアンテナ・ループと、送信(WTx)アンテナ及び受信(WRx)アンテナを含むアンテナ列とを備える少なくとも1つの無線RFコイルと、
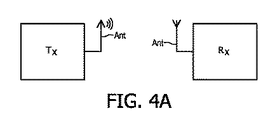
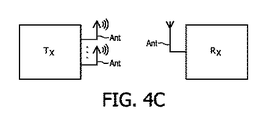
複数の送信(BTx)アンテナ及び受信(BRx)アンテナを含むアンテナ列(ANT)を有するベース送信器システムであって、選択された空間ダイバーシチ伝送法を使用して前記少なくとも1つの無線RFコイルと通信するベース送信器システムと、
前記ベース送信器システム及び前記少なくとも1つの無線RFコイルを制御する少なくとも1つのコントローラとを備える磁気共鳴システムであって、
前記少なくとも1つのコントローラは、
前記ベース送信器システムと前記少なくとも1つの無線RFコイルとの間の通信に使用可能な送信アンテナ及び受信アンテナのうちの少なくとも一方のアンテナの数を決定し、
前記ベース送信器システムの前記複数の送信(BTx)アンテナ及び前記受信(BRx)アンテナを、前記少なくとも1つの無線RFコイルの前記送信(WTx)アンテナ及び前記受信(WRx)アンテナに結合して、対応するアンテナ・ペアリングを形成し、それぞれのアンテナ・ペアリングの信号特性情報を決定し、
前記ベース送信器システムと前記少なくとも1つの無線RFコイルとの間の所与のタイプの情報の通信を可能にするために、前記少なくとも1つの無線RFコイルと通信するための前記空間ダイバーシチ伝送法を、決定された送信アンテナ及び受信アンテナの前記数並びに決定された前記信号特性情報に基づいて選択し、
前記ベース送信器システムと前記少なくとも1つの無線RFコイルとの間の少なくとも1つの通信チャネルを、選択された前記空間ダイバーシチ伝送法に従って確立する、
磁気共鳴システム。 - 前記少なくとも1つのコントローラは、前記ベース送信器システムと前記少なくとも1つの無線RFコイルとの間の通信を可能にする前記少なくとも1つの無線RFコイルにおける前記決定されたアンテナの数に従って、前記選択された空間ダイバーシチ伝送法を、多入力多出力、多入力単出力、単入力多出力及び単入力単出力伝送法のうちの少なくとも1つの伝送法から決定する、請求項1に記載の磁気共鳴システム。
- 前記少なくとも1つのコントローラは、
前記使用可能な送信アンテナ及び受信アンテナの数が1以下であると決定されたときには多入力単出力伝送法と単入力単出力伝送法とのうちの一方の伝送法を選択し、
前記使用可能な送信アンテナ及び受信アンテナの数が1よりも大きいと決定されたときには多入力多出力伝送法と単入力多出力伝送法とのうちの一方の伝送法を選択する、請求項1に記載の磁気共鳴システム。 - 前記少なくとも1つのコントローラは、使用可能な前記アンテナ・ペアリングを分類し、前記使用可能なアンテナ・ペアリングの前記分類に基づいてアンテナ・ペアリングを選択する、請求項1に記載の磁気共鳴システム。
- 前記少なくとも1つのコントローラは、前記ベース送信器システムと前記少なくとも1つの無線RFコイルとの間で送信されるべきタイプの情報を決定し、決定された前記タイプの情報を送信するのに適した、所与の分類を有する使用可能な前記アンテナ・ペアリングを選択する、請求項4に記載の磁気共鳴システム。
- 見通し線と分類された1つ又は複数のアンテナ・ペアリングが、リアルタイム・オペレーティング・システム情報を伝送するために選択され、障害物を有する直接経路/直接信号と分類された1つ又は複数のアンテナ・ペアリングが、高データ速度情報を伝送するために選択される、請求項5に記載の磁気共鳴システム。
- 磁気共鳴システムを動作させる方法であって、前記方法は、少なくとも1つのコントローラによって制御され、前記方法は、
アンテナ・ループと送信(WTx)アンテナ及び受信(WRx)アンテナを含むアンテナ列とを備える少なくとも1つの無線RFコイルから、誘導磁気共鳴信号を受信するステップと、
前記少なくとも1つの無線RFコイルと、複数の送信(BTx)アンテナ及び受信(BRx)アンテナを含むアンテナ列を有するベース送信器システムとの間で、選択された空間ダイバーシチ伝送法を使用して通信するステップと、
前記ベース送信器システムと前記少なくとも1つの無線RFコイルとの間の通信に使用可能な前記送信アンテナと前記受信アンテナのうちの少なくとも一方のアンテナの数を決定するステップと、
前記ベース送信器システムの前記複数の送信(BTx)アンテナ及び前記受信(BRx)アンテナを、前記少なくとも1つの無線RFコイルの前記送信(WTx)アンテナ及び前記受信(WRx)アンテナに結合して、対応するアンテナ・ペアリングを形成するステップと、
それぞれの前記アンテナ・ペアリングの信号特性情報を決定するステップと、
前記ベース送信器システムと前記少なくとも1つの無線RFコイルとの間の所与のタイプの情報の通信を可能にするために、前記少なくとも1つの無線RFコイルと通信するための前記空間ダイバーシチ伝送法を、決定された送信アンテナ及び受信アンテナの前記数並びに決定された前記信号特性情報に基づいて選択するステップと、
前記ベース送信器システムと前記少なくとも1つの無線RFコイルとの間の少なくとも1つの通信チャネルを、選択された前記空間ダイバーシチ伝送法に従って確立するステップと、
を有する、方法。 - 前記ベース送信器システムと前記少なくとも1つの無線RFコイルとの間の通信を可能にする前記少なくとも1つの無線RFコイルにおける前記決定されたアンテナの数に従って、選択された前記空間ダイバーシチ伝送法を、多入力多出力、多入力単出力、単入力多出力及び単入力単出力伝送法のうちの少なくとも1つの伝送法から決定するステップを含む、請求項7に記載の方法。
- 使用可能な送信アンテナ及び受信アンテナの数が1以下であると決定されたときに多入力単出力伝送法と単入力単出力伝送法のうちの一方の伝送法を選択するステップと、
使用可能な送信アンテナ及び受信アンテナの数が1よりも大きいと決定されたときに多入力多出力伝送法と単入力多出力伝送法のうちの一方の伝送法を選択するステップと、
を有する、請求項7に記載の方法。 - 使用可能な前記アンテナ・ペアリングを分類するステップと、
前記使用可能なアンテナ・ペアリングの前記分類に基づいてアンテナ・ペアリングを選択するステップと、
を有する、請求項7に記載の方法。 - 前記ベース送信器システムと前記少なくとも1つの無線RFコイルとの間で送信されるべきタイプの情報を決定するステップと、
決定された前記タイプの情報を送信するのに適した、所与の分類を有する前記使用可能なアンテナ・ペアリングを選択するステップと、
を有する、請求項10に記載の方法。 - リアルタイム・オペレーティング・システム情報を伝送するために、見通し線と分類された1つ又は複数のアンテナ・ペアリングを選択するステップと、
高データ速度情報を伝送するために、障害物を有する直接経路/直接信号と分類された1つ又は複数のアンテナ・ペアリングを選択するステップと、
を有する、請求項11に記載の方法。 - コンピュータ可読の非一時的メモリ媒体上に記憶された、磁気共鳴システム用のコンピュータ・プログラムであって、前記コンピュータ・プログラムはコンピュータ・プログラム命令を含み、前記コンピュータ・プログラム命令は、プロセッサによって実行されたときに、
アンテナ・ループと送信(WTx)アンテナ及び受信(WRx)アンテナを含むアンテナ列とを備える少なくとも1つの無線RFコイルから、誘導磁気共鳴信号を受信するステップと、
前記少なくとも1つの無線RFコイルと、複数の送信(BTx)アンテナ及び受信(BRx)アンテナを含むアンテナ列を有するベース送信器システムとの間で、選択された空間ダイバーシチ伝送法を使用して通信するステップと、
前記ベース送信器システムと前記少なくとも1つの無線RFコイルとの間の通信に使用可能な前記送信アンテナと前記受信アンテナのうちの少なくとも一方のアンテナの数を決定するステップと、
前記ベース送信器システムの前記複数の送信(BTx)アンテナ及び前記受信(BRx)アンテナを、前記少なくとも1つの無線RFコイルの前記送信(WTx)アンテナ及び前記受信(WRx)アンテナに結合して、対応するアンテナ・ペアリングを形成するステップと、
それぞれの前記アンテナ・ペアリングの信号特性情報を決定するステップと、
前記ベース送信器システムと前記少なくとも1つの無線RFコイルとの間の所与のタイプの情報の通信を可能にするために、前記少なくとも1つの無線RFコイルと通信するための前記空間ダイバーシチ伝送法を、決定された送信アンテナ及び受信アンテナの前記数並びに決定された前記信号特性情報に基づいて選択するステップと、
前記ベース送信器システムと前記少なくとも1つの無線RFコイルとの間の少なくとも1つの通信チャネルを、選択された前記空間ダイバーシチ伝送法に従って確立するステップと、
を有する方法を、前記プロセッサに実行させる、コンピュータ・プログラム。 - 前記方法は、前記ベース送信器システムと前記少なくとも1つの無線RFコイルとの間の通信を可能にする前記少なくとも1つの無線RFコイルにおける前記決定されたアンテナの数に従って、前記選択された空間ダイバーシチ伝送法を、多入力多出力、多入力単出力、単入力多出力及び単入力単出力伝送法のうちの少なくとも1つの伝送法から決定するステップを含む、請求項13に記載のコンピュータ・プログラム。
- 前記方法は、
前記使用可能な送信アンテナ及び受信アンテナの数が1以下であると決定されたときに多入力単出力伝送法と単入力単出力伝送法のうちの一方の伝送法を選択するステップと、
前記使用可能な送信アンテナ及び受信アンテナの数が1よりも大きいと決定されたときに多入力多出力伝送法と単入力多出力伝送法のうちの一方の伝送法を選択するステップと、
を有する、請求項13に記載のコンピュータ・プログラム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562262411P | 2015-12-03 | 2015-12-03 | |
| US62/262,411 | 2015-12-03 | ||
| PCT/IB2016/057147 WO2017093873A1 (en) | 2015-12-03 | 2016-11-28 | Magnetic resonance (mr) system with increased wireless channel throughput and method of operation thereof |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019505252A JP2019505252A (ja) | 2019-02-28 |
| JP2019505252A5 JP2019505252A5 (ja) | 2020-01-16 |
| JP6901481B2 true JP6901481B2 (ja) | 2021-07-14 |
Family
ID=57517940
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018528060A Active JP6901481B2 (ja) | 2015-12-03 | 2016-11-28 | 増大した無線チャネル・スループットを有する磁気共鳴(mr)システム及び該システムの動作方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10852374B2 (ja) |
| EP (1) | EP3384305B1 (ja) |
| JP (1) | JP6901481B2 (ja) |
| CN (1) | CN108541303B (ja) |
| WO (1) | WO2017093873A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109155660B (zh) * | 2016-05-12 | 2022-08-30 | 交互数字专利控股公司 | 用于在毫米波无线局域网络中波束成形反馈的系统和方法 |
| GB2563677B (en) * | 2017-06-23 | 2019-10-02 | Elekta ltd | Communication apparatus for radiation therapy device |
| WO2019086312A1 (en) * | 2017-11-01 | 2019-05-09 | Koninklijke Philips N.V. | Systems and methods for wireless communication in magnetic resonance imaging (mri) systems |
| EP3581954B1 (de) | 2018-06-12 | 2023-03-08 | Siemens Healthcare GmbH | Sensor und magnetresonanztomograph mit drahtloser nahfeldübertragung von energie und daten |
| JP7300305B2 (ja) * | 2019-04-24 | 2023-06-29 | キヤノンメディカルシステムズ株式会社 | 磁気共鳴イメージング装置 |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5666055A (en) * | 1995-10-02 | 1997-09-09 | Jones; Randall W. | Surface coil system for a single channel NMR receiver |
| US8644907B2 (en) * | 1999-10-28 | 2014-02-04 | Medtronic Navigaton, Inc. | Method and apparatus for surgical navigation |
| US20020193146A1 (en) | 2001-06-06 | 2002-12-19 | Mark Wallace | Method and apparatus for antenna diversity in a wireless communication system |
| ATE551784T1 (de) * | 2005-04-29 | 2012-04-15 | Koninkl Philips Electronics Nv | Verfahren und schaltungsanordnung für den betrieb von mehrkanal-sende-/empfangsantennen- vorrichtungen |
| CN101385254A (zh) | 2005-09-22 | 2009-03-11 | 皇家飞利浦电子股份有限公司 | 数据处理装置、用于检验相关对象的断层摄影装置、用于检验相关对象的方法、计算机可读介质和程序单元 |
| EP1934622A1 (en) * | 2005-10-07 | 2008-06-25 | Koninklijke Philips Electronics N.V. | Multiple-channel transmit magnetic resonance |
| US8155101B2 (en) | 2005-12-23 | 2012-04-10 | Koninklijke Philips Electronics N.V. | Method and arrangement for wireless communication of signals in a MR system |
| MX2008014883A (es) * | 2006-05-25 | 2008-12-05 | Koninl Philips Electronics Nv | Transmision inalambrica de radio de banda ultraancha en sistemas de imagen por resonancia magnetica que involucran estimacion de canal. |
| DE102007047020B4 (de) | 2007-10-01 | 2012-07-12 | Siemens Ag | Anordnung zur Übertragung von Magnetresonanzsignalen |
| GB0820689D0 (en) | 2008-11-12 | 2008-12-17 | Siemens Ag | Antenna arrangement |
| GB0820687D0 (en) | 2008-11-12 | 2008-12-17 | Siemens Ag | Upconversion method |
| US8831318B2 (en) | 2009-07-06 | 2014-09-09 | The Board Of Trustees Of The University Of Illinois | Auto-calibrating parallel MRI technique with distortion-optimal image reconstruction |
| WO2011058458A1 (en) * | 2009-11-13 | 2011-05-19 | Koninklijke Philips Electronics, N.V. | Quick re-connect diversity radio system |
| US8244192B2 (en) * | 2009-11-25 | 2012-08-14 | General Electric Company | System and method for wireless communication of magnetic resonance data |
| US8854042B2 (en) * | 2010-08-05 | 2014-10-07 | Life Services, LLC | Method and coils for human whole-body imaging at 7 T |
| RU2597325C2 (ru) * | 2011-01-14 | 2016-09-10 | Конинклейке Филипс Электроникс Н.В. | Система радиоприемника с разнесением |
| US10141770B2 (en) * | 2011-01-18 | 2018-11-27 | Mojo Mobility, Inc. | Powering and/or charging with a plurality of protocols |
| DE102011006497B4 (de) * | 2011-03-31 | 2014-07-03 | Siemens Aktiengesellschaft | Lokalspulensystem, Magnetresonanzsystem und Verfahren zur Übertragung von Signalen von einer Lokalspule |
| DE102012200599A1 (de) * | 2012-01-17 | 2013-07-18 | Siemens Aktiengesellschaft | Elastisches Antennensystem für ein Magnetresonanzbildgebungssystem |
| US9449757B2 (en) * | 2012-11-16 | 2016-09-20 | Witricity Corporation | Systems and methods for wireless power system with improved performance and/or ease of use |
| JP6104712B2 (ja) * | 2013-05-28 | 2017-03-29 | 東芝メディカルシステムズ株式会社 | 磁気共鳴イメージング装置 |
| DE102013210381B3 (de) * | 2013-06-05 | 2014-05-28 | Siemens Aktiengesellschaft | Signalübertragung von und zu einer Lokalspule einer Magnetresonanzanlage |
| DE102014200043A1 (de) * | 2014-01-07 | 2015-07-09 | Siemens Aktiengesellschaft | Empfangsvorrichtung zum Empfangen eines Nutzsignals |
| JP2017506997A (ja) * | 2014-01-17 | 2017-03-16 | アーテリーズ インコーポレイテッド | 4次元(4d)フロー磁気共鳴画像化のための装置、方法、および物品 |
| US20160064943A1 (en) * | 2014-08-28 | 2016-03-03 | Konkuk University Industrial Cooperation Corp. | Controlling method and system of power transmission system |
| KR102487525B1 (ko) * | 2014-09-04 | 2023-01-12 | 삼성전자주식회사 | 무선 통신 시스템에서 피드백 정보 송신을 위한 장치 및 방법 |
-
2016
- 2016-11-28 CN CN201680077717.3A patent/CN108541303B/zh active Active
- 2016-11-28 US US15/779,868 patent/US10852374B2/en active Active
- 2016-11-28 EP EP16808810.2A patent/EP3384305B1/en active Active
- 2016-11-28 WO PCT/IB2016/057147 patent/WO2017093873A1/en active Application Filing
- 2016-11-28 JP JP2018528060A patent/JP6901481B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN108541303A (zh) | 2018-09-14 |
| CN108541303B (zh) | 2021-05-18 |
| JP2019505252A (ja) | 2019-02-28 |
| EP3384305B1 (en) | 2022-03-23 |
| US10852374B2 (en) | 2020-12-01 |
| EP3384305A1 (en) | 2018-10-10 |
| US20180356478A1 (en) | 2018-12-13 |
| WO2017093873A1 (en) | 2017-06-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6901481B2 (ja) | 増大した無線チャネル・スループットを有する磁気共鳴(mr)システム及び該システムの動作方法 | |
| AU2020202343B2 (en) | Method and apparatus for reduced feedback FD-MIMO | |
| Shlezinger et al. | Dynamic metasurface antennas for uplink massive MIMO systems | |
| JP7206186B2 (ja) | ダウンリンク及びアップリンクチャネル状態情報を獲得するための方法及び装置 | |
| JP6504258B2 (ja) | 無線通信システム、及び無線通信システムにおける装置及び方法 | |
| JP6446419B2 (ja) | 複数のmimoレイヤを判定する方法及び装置 | |
| CN109845133B (zh) | 混合天线架构的分级波束成形和秩自适应的系统和方法 | |
| JP2023162272A (ja) | 方法、測定環境および被試験装置 | |
| US20220006496A1 (en) | Method for reporting channel state information in wireless communication system, and device for same | |
| RU2446575C2 (ru) | Адаптивные способы управления лучом для максимизации ресурса беспроводной линии связи и уменьшение разброса задержки, используя многочисленные передающие и приемные антенны | |
| JP2019146180A (ja) | Mimoトレーニング方法及び無線装置 | |
| KR102273752B1 (ko) | Mimo 송신기의 전처리 필터를 이용한 전송 신호 생성 방법 | |
| CN110463072A (zh) | 在无线通信系统中报告信道状态信息的方法和设备 | |
| CN109314584B (zh) | 用于测试射频(rf)数据包信号收发器的正常隐式波束成形操作的方法 | |
| WO2015184927A1 (zh) | 一种下行导频信号的处理方法及系统 | |
| CN111656845A (zh) | 用于无线通信的电子设备和方法、计算机可读存储介质 | |
| WO2021133412A1 (en) | Beam management and antenna calibration in mimo systems | |
| US20180041260A1 (en) | Adaptive user-specific beam forming | |
| KR20210153118A (ko) | 프리코딩 행렬 표시 및 결정 방법 및 통신 장치 | |
| US9214993B2 (en) | Method and apparatus for transmitting and receiving channel related information | |
| KR20140050569A (ko) | 다중 사용자 무선 시스템과 하이브리드 자동 재전송에서의 채널 출력 피드백 적용 | |
| WO2022027625A1 (en) | Frequency domain precoding for fdd reciprocity | |
| US9746534B2 (en) | Adapter, coil, and magnetic resonance imaging system | |
| KR102215381B1 (ko) | 무선랜에서 이종의 간섭정렬 기법에 기초하여 무선 통신을 수행하는 방법 및 장치 | |
| CN109314551A (zh) | 多输入多输出导频信号 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191126 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191126 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201118 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201208 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210521 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210617 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6901481 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |