JP6899528B2 - 交通管理装置、交通管理システムおよび交通管理方法 - Google Patents
交通管理装置、交通管理システムおよび交通管理方法 Download PDFInfo
- Publication number
- JP6899528B2 JP6899528B2 JP2017136000A JP2017136000A JP6899528B2 JP 6899528 B2 JP6899528 B2 JP 6899528B2 JP 2017136000 A JP2017136000 A JP 2017136000A JP 2017136000 A JP2017136000 A JP 2017136000A JP 6899528 B2 JP6899528 B2 JP 6899528B2
- Authority
- JP
- Japan
- Prior art keywords
- information
- traffic
- vehicle detector
- traffic management
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/07—Controlling traffic signals
- G08G1/08—Controlling traffic signals according to detected number or speed of vehicles
Description
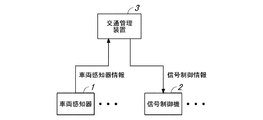
2 信号制御機
3 交通管理装置
21 通信部
22 制御部
23 記憶部
41 制御部
42 記憶部
Claims (9)
- エリア内に設置された車両感知器により取得した車両感知器情報に基づいて、エリア内の交通管理を行う交通管理装置であって、
前記車両感知器から前記車両感知器情報を受信する通信部と、
前記車両感知器情報に基づいて、前記エリア内の交通管理に係る情報処理を行う制御部と、を備え、
前記制御部は、
前記車両感知器情報、および前記エリア内に設置された信号制御機に関する信号制御実績情報に基づいて、前記エリアを対象として交通流モデルを用いた推計処理を行って、前記エリア内の交通状況に関する情報を取得し、
前記エリアの交通状況に関する情報に基づいて、前記エリア内の所定の位置に車両感知器が設置されたとみなす仮想車両感知器により取得したものとして取り扱う仮想車両感知器情報を生成することを特徴とする交通管理装置。 - 前記制御部は、前記仮想車両感知器情報として、前記仮想車両感知器を設定した位置における交通量および占有率を取得することを特徴とする請求項1に記載の交通管理装置。
- 前記制御部は、境界位置に前記車両感知器が配置されて、この車両感知器により前記エリアに流入する交通量に関する情報を取得可能なように、前記エリアを設定することを特徴とする請求項1に記載の交通管理装置。
- 前記制御部は、前記エリア内に設置された廃止予定の車両感知器の位置に前記仮想車両感知器を設定することを特徴とする請求項1に記載の交通管理装置。
- 前記制御部は、前記仮想車両感知器情報に基づいて、前記信号制御機を制御するための信号制御情報を生成し、
前記通信部は、前記信号制御情報を前記信号制御機に送信することを特徴とする請求項1に記載の交通管理装置。 - 前記制御部は、前記車両感知器の設置状況に関する情報、および道路網の構成に関する情報に基づいて、前記エリアを決定することを特徴とする請求項1に記載の交通管理装置。
- 前記制御部は、前記車両感知器情報、前記信号制御実績情報、および前記エリア内の道路網の構成に関する情報に基づいて、前記エリア内の交通状況を推計することを特徴とする請求項1に記載の交通管理装置。
- エリア内に設置された車両感知器と、この車両感知器により取得した車両感知器情報に基づいて、エリア内の交通管理を行う交通管理装置と、を備える交通管理システムであって、
前記交通管理装置は、
前記車両感知器から前記車両感知器情報を受信する通信部と、
前記車両感知器情報に基づいて、前記エリア内の交通管理に係る情報処理を行う制御部と、を備え、
前記制御部は、
前記車両感知器情報、および前記エリア内に設置された信号制御機に関する信号制御実績情報に基づいて、前記エリアを対象として交通流モデルを用いた推計処理を行って、前記エリア内の交通状況に関する情報を取得し、
前記エリアの交通状況に関する情報に基づいて、前記エリア内の所定の位置に車両感知器が設置されたとみなす仮想車両感知器により取得したものとして取り扱う仮想車両感知器情報を生成することを特徴とする交通管理システム。 - 交通管理装置において、エリア内に設置された車両感知器により取得した車両感知器情報に基づいて、エリア内の交通管理を行う交通管理方法であって、
前記車両感知器情報、および前記エリア内に設置された信号制御機に関する信号制御実績情報に基づいて、前記エリアを対象として交通流モデルを用いた推計処理を行って、前記エリア内の交通状況に関する情報を取得し、
前記エリアの交通状況に関する情報に基づいて、前記エリア内の所定の位置に車両感知器が設置されたとみなす仮想車両感知器により取得したものとして取り扱う仮想車両感知器情報を生成し、
前記車両感知器情報および前記仮想車両感知器情報に基づいて、前記信号制御機を制御する信号制御情報を生成することを特徴とする交通管理方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017136000A JP6899528B2 (ja) | 2017-07-12 | 2017-07-12 | 交通管理装置、交通管理システムおよび交通管理方法 |
| PCT/JP2018/020685 WO2019012832A1 (ja) | 2017-07-12 | 2018-05-30 | 交通管理装置、交通管理システムおよび交通管理方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017136000A JP6899528B2 (ja) | 2017-07-12 | 2017-07-12 | 交通管理装置、交通管理システムおよび交通管理方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019020799A JP2019020799A (ja) | 2019-02-07 |
| JP2019020799A5 JP2019020799A5 (ja) | 2020-08-20 |
| JP6899528B2 true JP6899528B2 (ja) | 2021-07-07 |
Family
ID=65002117
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017136000A Active JP6899528B2 (ja) | 2017-07-12 | 2017-07-12 | 交通管理装置、交通管理システムおよび交通管理方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6899528B2 (ja) |
| WO (1) | WO2019012832A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021058100A1 (en) * | 2019-09-25 | 2021-04-01 | Huawei Technologies Co., Ltd. | Multisensory learning system for traffic prediction |
| CN110969871B (zh) * | 2019-12-18 | 2020-11-24 | 浙江大学 | 一种智能交通灯控制系统和控制方法 |
| JP7347367B2 (ja) * | 2020-08-11 | 2023-09-20 | トヨタ自動車株式会社 | エネルギー供給システム、情報処理装置、及び、方法 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006343814A (ja) * | 2005-06-07 | 2006-12-21 | Sumitomo Electric Ind Ltd | 交通管制システム及び交通管制システムに情報を送信するための車載器 |
| JP6404572B2 (ja) * | 2014-02-05 | 2018-10-10 | パナソニック株式会社 | 信号制御装置、信号制御システムおよび信号制御方法 |
| JP6226300B2 (ja) * | 2014-09-19 | 2017-11-08 | パナソニックIpマネジメント株式会社 | 交通情報生成装置および交通情報生成方法 |
| JP6292555B2 (ja) * | 2014-09-19 | 2018-03-14 | パナソニックIpマネジメント株式会社 | 交通管理装置、交通管理システムおよび交通管理方法 |
| SG11201705958PA (en) * | 2015-02-23 | 2017-08-30 | Sumitomo Electric Industries | Traffic index generation device, traffic index generation method, and computer program |
-
2017
- 2017-07-12 JP JP2017136000A patent/JP6899528B2/ja active Active
-
2018
- 2018-05-30 WO PCT/JP2018/020685 patent/WO2019012832A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019020799A (ja) | 2019-02-07 |
| WO2019012832A1 (ja) | 2019-01-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8755991B2 (en) | Method and structure for vehicular traffic prediction with link interactions and missing real-time data | |
| JP4969814B2 (ja) | 道路交通状況把握システム | |
| Geroliminis et al. | Prediction of arrival profiles and queue lengths along signalized arterials by using a Markov decision process | |
| WO2015166876A1 (ja) | 交通信号制御装置、交通信号制御方法、及びコンピュータプログラム | |
| JP6899528B2 (ja) | 交通管理装置、交通管理システムおよび交通管理方法 | |
| JP7028167B2 (ja) | 交通制御支援システム、交通制御支援方法およびプログラム | |
| CN102288193A (zh) | 一种基于历史数据的机动车出行路径的确定方法 | |
| JP2009259158A (ja) | 交通状態シミュレーション装置及びプログラム | |
| Chevallier et al. | A macroscopic theory for unsignalized intersections | |
| JP2005182219A (ja) | 交通信号制御装置と交通信号制御方法及び記憶媒体 | |
| CN113223293B (zh) | 路网仿真模型的构建方法、装置及电子设备 | |
| Knoop | Introduction to traffic flow theory: An introduction with exercises | |
| Yang et al. | Effects of left-turn waiting areas on capacity and level of service of signalized intersections | |
| Hans et al. | Clustering approach for assessing the travel time variability of arterials | |
| KR101123967B1 (ko) | 교통 정체 예측 시스템, 예측 방법 및 그 기록 매체 | |
| KR102329826B1 (ko) | 인공지능 기반 교통신호 제어 장치 및 방법 | |
| JP5898553B2 (ja) | 交通流予測装置、交通流予測方法及び交通流予測プログラム | |
| JP7276964B2 (ja) | 交通指標の算出装置、算出方法、交通信号制御システム、及びコンピュータプログラム | |
| JP7225303B2 (ja) | 事故予報システム、および、事故予報方法 | |
| JP2018018210A (ja) | 信号管制装置、信号管制システム、信号管制方法及びプログラム | |
| JP2019191802A (ja) | 渋滞度判定装置、渋滞度判定方法、及びコンピュータプログラム | |
| JP6292555B2 (ja) | 交通管理装置、交通管理システムおよび交通管理方法 | |
| CN112797994A (zh) | 用于确定路线的预计到达时间的方法及相关装置和服务器 | |
| JP6226300B2 (ja) | 交通情報生成装置および交通情報生成方法 | |
| Verghese et al. | Development and implementation of a model-based road traffic-control scheme |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200709 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200709 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210427 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210526 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6899528 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |