JP6878434B2 - 介入デバイス認識 - Google Patents
介入デバイス認識 Download PDFInfo
- Publication number
- JP6878434B2 JP6878434B2 JP2018530879A JP2018530879A JP6878434B2 JP 6878434 B2 JP6878434 B2 JP 6878434B2 JP 2018530879 A JP2018530879 A JP 2018530879A JP 2018530879 A JP2018530879 A JP 2018530879A JP 6878434 B2 JP6878434 B2 JP 6878434B2
- Authority
- JP
- Japan
- Prior art keywords
- ultrasonic
- intervention device
- image
- circle
- distal end
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000002604 ultrasonography Methods 0.000 claims description 65
- 239000000523 sample Substances 0.000 claims description 39
- 238000003384 imaging method Methods 0.000 claims description 38
- 230000004927 fusion Effects 0.000 claims description 34
- 239000002033 PVDF binder Substances 0.000 claims description 11
- 229920002981 polyvinylidene fluoride Polymers 0.000 claims description 11
- 238000004590 computer program Methods 0.000 claims description 7
- 239000000463 material Substances 0.000 claims description 4
- 238000005520 cutting process Methods 0.000 claims description 3
- 210000005248 left atrial appendage Anatomy 0.000 claims description 3
- 238000007789 sealing Methods 0.000 claims description 2
- 229920001897 terpolymer Polymers 0.000 claims description 2
- 238000003325 tomography Methods 0.000 claims description 2
- XPIIYLUXKKHAPJ-UHFFFAOYSA-N 1,1,2-trifluoroethene;hydrofluoride Chemical group F.FC=C(F)F XPIIYLUXKKHAPJ-UHFFFAOYSA-N 0.000 claims 1
- 241000282376 Panthera tigris Species 0.000 claims 1
- 238000012285 ultrasound imaging Methods 0.000 description 13
- 238000004891 communication Methods 0.000 description 4
- 238000001514 detection method Methods 0.000 description 4
- 238000003780 insertion Methods 0.000 description 4
- 230000037431 insertion Effects 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 4
- 238000003860 storage Methods 0.000 description 4
- 239000003550 marker Substances 0.000 description 3
- 210000001765 aortic valve Anatomy 0.000 description 2
- 238000005538 encapsulation Methods 0.000 description 2
- 238000002608 intravascular ultrasound Methods 0.000 description 2
- 239000011159 matrix material Substances 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- UAEPNZWRGJTJPN-UHFFFAOYSA-N CC1CCCCC1 Chemical compound CC1CCCCC1 UAEPNZWRGJTJPN-UHFFFAOYSA-N 0.000 description 1
- 230000002730 additional effect Effects 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 210000003484 anatomy Anatomy 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- XIQPNCZCDTUCTM-UHFFFAOYSA-N fluorane Chemical compound F.F.F.F XIQPNCZCDTUCTM-UHFFFAOYSA-N 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000011017 operating method Methods 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 230000001954 sterilising effect Effects 0.000 description 1
- 238000004659 sterilization and disinfection Methods 0.000 description 1
- 238000010408 sweeping Methods 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
- 230000002792 vascular Effects 0.000 description 1
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/18—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using ultrasonic, sonic, or infrasonic waves
- G01S5/30—Determining absolute distances from a plurality of spaced points of known location
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0833—Detecting organic movements or changes, e.g. tumours, cysts, swellings involving detecting or locating foreign bodies or organic structures
- A61B8/0841—Detecting organic movements or changes, e.g. tumours, cysts, swellings involving detecting or locating foreign bodies or organic structures for locating instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/12—Diagnosis using ultrasonic, sonic or infrasonic waves in body cavities or body tracts, e.g. by using catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4438—Means for identifying the diagnostic device, e.g. barcodes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4483—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device characterised by features of the ultrasound transducer
- A61B8/4488—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device characterised by features of the ultrasound transducer the transducer being a phased array
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8909—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration
- G01S15/8915—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration using a transducer array
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8909—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration
- G01S15/8915—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration using a transducer array
- G01S15/8918—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration using a transducer array the array being linear
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8977—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using special techniques for image reconstruction, e.g. FFT, geometrical transformations, spatial deconvolution, time deconvolution
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/899—Combination of imaging systems with ancillary equipment
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52023—Details of receivers
- G01S7/52025—Details of receivers for pulse systems
- G01S7/52026—Extracting wanted echo signals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52053—Display arrangements
- G01S7/52057—Cathode ray tube displays
- G01S7/52073—Production of cursor lines, markers or indicia by electronic means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
- A61B2017/3413—Needle locating or guiding means guided by ultrasound
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2063—Acoustic tracking systems, e.g. using ultrasound
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/378—Surgical systems with images on a monitor during operation using ultrasound
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/378—Surgical systems with images on a monitor during operation using ultrasound
- A61B2090/3782—Surgical systems with images on a monitor during operation using ultrasound transmitter or receiver in catheter or minimal invasive instrument
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/378—Surgical systems with images on a monitor during operation using ultrasound
- A61B2090/3782—Surgical systems with images on a monitor during operation using ultrasound transmitter or receiver in catheter or minimal invasive instrument
- A61B2090/3786—Surgical systems with images on a monitor during operation using ultrasound transmitter or receiver in catheter or minimal invasive instrument receiver only
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/461—Displaying means of special interest
- A61B8/463—Displaying means of special interest characterised by displaying multiple images or images and diagnostic data on one display
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/90—Identification means for patients or instruments, e.g. tags
- A61B90/94—Identification means for patients or instruments, e.g. tags coded with symbols, e.g. text
- A61B90/96—Identification means for patients or instruments, e.g. tags coded with symbols, e.g. text using barcodes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/90—Identification means for patients or instruments, e.g. tags
- A61B90/98—Identification means for patients or instruments, e.g. tags using electromagnetic means, e.g. transponders
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- General Health & Medical Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Acoustics & Sound (AREA)
- General Physics & Mathematics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Computer Networks & Wireless Communication (AREA)
- Biophysics (AREA)
- Gynecology & Obstetrics (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Robotics (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Description
Claims (12)
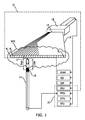
- ビーム形成超音波撮像システムの超音波トランスデューサアレイによって放射される複数のビームによって画定される超音波場の像平面に対する介入デバイスの位置を決定する装置であって、
前記位置は、前記介入デバイスに取り付けられる超音波検出器によって検出された前記超音波トランスデューサアレイによって放射された超音波信号に基づいて決定され、前記装置は、
前記超音波トランスデューサアレイによって検出された超音波信号に基づいて、前記像平面に対応する再構成された超音波画像を提供する画像再構成ユニットと、
前記超音波トランスデューサアレイによって放射された超音波信号と前記超音波検出器によって検出された超音波信号との相関関係に基づいて、前記像平面に対する前記介入デバイスの前記位置を特定する位置決定ユニットであって、前記位置は、前記超音波検出器と前記像平面との最短距離に対応する面外距離を含む、前記位置決定ユニットと、
複数のトランスデューサ−遠位端長さを有する幾何学的配置提供ユニットであって、各長さは、複数の介入デバイスタイプのそれぞれについて、介入デバイスの遠位端と前記介入デバイスに取り付けられる超音波検出器との所定距離に対応する、前記幾何学的配置提供ユニットと、
前記超音波場内の前記介入デバイスのタイプを示すデータを受信し、
前記タイプに基づいて、前記幾何学的配置提供ユニットから、対応するトランスデューサ−遠位端長さを選択し、
前記超音波場内の前記介入デバイスについて、前記面外距離及び前記トランスデューサ−遠位端長さの両方を、前記再構成された超音波画像内に示す画像融合ユニットと、
を含み、
前記面外距離は、前記再構成された超音波画像内に、第1の形状のサイズとして示され、
前記トランスデューサ−遠位端長さは、前記再構成された超音波画像内に、第2の形状のサイズとして示され、
前記第1の形状及び前記第2の形状は、共通の中心を共有し、前記共通の中心は、前記超音波検出器の位置に相当する、装置。 - 前記第1の形状のサイズは、第1の円の半径であり、前記第2の形状のサイズは、第2の円の半径である、請求項1に記載の装置。
- 前記共通の中心は、前記超音波検出器の前記位置に最も近い前記像平面内の点である、請求項2に記載の装置。
- 前記画像融合ユニットは更に、
前記第1の円の外周と前記第2の円の外周とが一致する場合、前記第1の円及び前記第2の円は、共通の円として示され、
次の事項:
前記共通の円の外周が、前記第1の円の色及び前記第2の円の色とは異なる色で示される、
前記共通の円の外周が、前記第1の円のコントラスト及び前記第2の円のコントラストとは異なるコントラストで示される、
前記共通の円が、破線の外周で表示される、
前記共通の円の外周が、経時的に波打つ、
のうちの少なくとも1つが生じるように構成される、請求項2又は請求項3に記載の装置。 - 超音波トランスデューサアレイを更に含む、請求項1から請求項4までのいずれか一項に記載の装置。
- 介入デバイスに取り付けられた超音波検出器を有する前記介入デバイスを更に含み、
前記超音波検出器は、前記介入デバイスの遠位端から所定距離において、前記介入デバイスに取り付けられる、請求項1から請求項5までのいずれか一項に記載の装置。 - 前記ビーム形成超音波撮像システムは、2D超音波撮像プローブ、3D超音波撮像プローブ、経直腸的超音波断層プローブ、血管内超音波プローブ、経食道プローブ、経胸腔プローブ、経鼻プローブ、心腔内プローブの群から選択される撮像プローブを含む、請求項1から請求項6までのいずれか一項に記載の装置。
- 前記装置は、
ビーム形成超音波撮像システムの超音波トランスデューサアレイによって放射される超音波信号を検出する超音波検出器と、
データ担体と、
を含む、介入デバイスを更に含み、
前記超音波検出器は、前記介入デバイスの遠位端から所定距離において、前記介入デバイスに取り付けられ、
前記データ担体は、前記介入デバイスのタイプを示すデータを含み、前記データは、前記装置の前記画像融合ユニットによって受信されると、前記画像融合ユニットに、
前記装置の前記幾何学的配置提供ユニットから、前記介入デバイスのタイプについて、前記介入デバイスの前記遠位端と前記介入デバイスに取り付けられている前記超音波検出器との前記所定距離に対応するトランスデューサ−遠位端長さを選択させ、
前記装置の前記画像再構成ユニットによって再構成された超音波画像内に、前記超音波場内の前記介入デバイスの前記トランスデューサ−遠位端長さを示させる、請求項1から請求項7までのいずれか一項に記載の装置。 - 前記超音波検出器は、ポリフッ化ビニリデン、ポリフッ化ビニリデン三フッ化エチレンといったPVDFコポリマー、P(VDF−TrFE−CTFE)といったPVDFターポリマーのような圧電性物質から形成される、請求項8に記載の装置。
- 前記介入デバイスは、ニードル、カテーテル、ガイドワイヤ、プローブ、内視鏡、電極、ロボット、フィルタデバイス、バルーンデバイス、ステント、マイトラクリップ、左心耳閉鎖デバイス、ペースメーカ、静脈ライン、ドレナージライン、組織封止デバイス若しくは組織切断デバイスといった手術道具の群から選択される、請求項8に記載の装置。
- ビーム形成超音波撮像システムの超音波トランスデューサアレイによって放射される複数のビームによって画定される超音波場の像平面に対する介入デバイスの位置を決定する装置であって、前記位置は、前記介入デバイスに取り付けられる超音波検出器によって検出された前記超音波トランスデューサアレイによって放射された超音波信号に基づいて決定される、前記装置のプロセッサによって実行されると、前記プロセッサに、
前記超音波トランスデューサアレイによって検出された超音波信号に基づいて、前記像平面に対応する超音波画像を再構成するステップと、
前記超音波トランスデューサアレイによって放射された超音波信号と前記超音波検出器によって検出された超音波信号との相関関係に基づいて、前記像平面に対する前記介入デバイスの前記位置を特定するステップであって、前記位置は、前記超音波検出器と前記像平面との最短距離に対応する面外距離を含む、前記ステップと、
前記超音波場内の前記介入デバイスのタイプを示すデータを受信するステップと、
前記タイプに基づいて、ルックアップテーブルから、前記介入デバイスの遠位端と前記介入デバイスに取り付けられる前記超音波検出器との所定距離に対応するトランスデューサ−遠位端長さを選択するステップと、
前記超音波場内の前記介入デバイスについて、前記面外距離及び前記トランスデューサ−遠位端長さの両方を、再構成された前記超音波画像内に示すステップと、
を行わせる命令を含み、
前記面外距離は、前記再構成された超音波画像内に、第1の形状のサイズとして示され、
前記トランスデューサ−遠位端長さは、前記再構成された超音波画像内に、第2の形状のサイズとして示され、
前記第1の形状及び前記第2の形状は、共通の中心を共有し、前記共通の中心は、前記超音波検出器の位置に相当する、コンピュータプログラム。 - 前記第1の形状のサイズは、第1の円の半径であり、前記第2の形状のサイズは、第2の円の半径である、請求項11に記載のコンピュータプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021075644A JP7096395B2 (ja) | 2015-12-16 | 2021-04-28 | 介入デバイス認識 |
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562267948P | 2015-12-16 | 2015-12-16 | |
| US62/267,948 | 2015-12-16 | ||
| EP16154967 | 2016-02-10 | ||
| EP16154967.0 | 2016-02-10 | ||
| PCT/EP2016/079522 WO2017102369A1 (en) | 2015-12-16 | 2016-12-02 | Interventional device recognition |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021075644A Division JP7096395B2 (ja) | 2015-12-16 | 2021-04-28 | 介入デバイス認識 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018537227A JP2018537227A (ja) | 2018-12-20 |
| JP2018537227A5 JP2018537227A5 (ja) | 2020-01-16 |
| JP6878434B2 true JP6878434B2 (ja) | 2021-05-26 |
Family
ID=55349706
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018530879A Active JP6878434B2 (ja) | 2015-12-16 | 2016-12-02 | 介入デバイス認識 |
| JP2021075644A Active JP7096395B2 (ja) | 2015-12-16 | 2021-04-28 | 介入デバイス認識 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021075644A Active JP7096395B2 (ja) | 2015-12-16 | 2021-04-28 | 介入デバイス認識 |
Country Status (5)
| Country | Link |
|---|---|
| US (2) | US11275150B2 (ja) |
| EP (1) | EP3391083B1 (ja) |
| JP (2) | JP6878434B2 (ja) |
| CN (1) | CN108369273B (ja) |
| WO (1) | WO2017102369A1 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10588596B2 (en) * | 2017-03-14 | 2020-03-17 | Clarius Mobile Health Corp. | Systems and methods for detecting and enhancing viewing of a needle during ultrasound imaging |
| EP3530194A1 (en) | 2018-02-21 | 2019-08-28 | Koninklijke Philips N.V. | Interventional device with piezoelectric transducer |
| EP3632331A1 (en) * | 2018-10-05 | 2020-04-08 | Koninklijke Philips N.V. | Interventional device positioning using ultrasound signals |
| WO2020030746A1 (en) * | 2018-08-08 | 2020-02-13 | Koninklijke Philips N.V. | Interventional device positioning using ultrasound signals |
| EP3632332A1 (en) * | 2018-10-05 | 2020-04-08 | Koninklijke Philips N.V. | Tracking an interventional device respective an ultrasound image plane |
| EP3632333A1 (en) * | 2018-10-05 | 2020-04-08 | Koninklijke Philips N.V. | Interventional device positioning respective an ultrasound image plane |
| EP3633799A1 (en) * | 2018-10-05 | 2020-04-08 | Koninklijke Philips N.V. | Interventional device with electrical connections |
| JP7460613B2 (ja) * | 2018-10-25 | 2024-04-02 | コーニンクレッカ フィリップス エヌ ヴェ | 音響撮像における介入装置の先端の場所を推定するためのシステム、装置及び方法 |
| US11801113B2 (en) * | 2018-12-13 | 2023-10-31 | Covidien Lp | Thoracic imaging, distance measuring, and notification system and method |
| KR20210119173A (ko) * | 2020-03-24 | 2021-10-05 | 삼성메디슨 주식회사 | 초음파 프로브, 초음파 영상 장치 및 그 제어방법 |
| CN112083243B (zh) * | 2020-08-25 | 2023-03-28 | 深圳市赛禾医疗技术有限公司 | 导管类型识别方法、装置、终端设备及可读存储介质 |
| WO2022051657A1 (en) * | 2020-09-03 | 2022-03-10 | Bard Access Systems, Inc. | Portable ultrasound systems and methods |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4249539A (en) | 1979-02-09 | 1981-02-10 | Technicare Corporation | Ultrasound needle tip localization system |
| US5353798A (en) * | 1991-03-13 | 1994-10-11 | Scimed Life Systems, Incorporated | Intravascular imaging apparatus and methods for use and manufacture |
| CA2110148C (en) * | 1992-12-24 | 1999-10-05 | Aaron Fenster | Three-dimensional ultrasound imaging system |
| US6200268B1 (en) * | 1999-09-10 | 2001-03-13 | The Cleveland Clinic Foundation | Vascular plaque characterization |
| DE10210648A1 (de) * | 2002-03-11 | 2003-10-02 | Siemens Ag | Verfahren zur Erfassung und Darstellung eines in ein zu untersuchendes oder behandelndes Hohlraumorgan eines Patienten eingeführten medizinischen Instruments |
| US7270634B2 (en) * | 2003-03-27 | 2007-09-18 | Koninklijke Philips Electronics N.V. | Guidance of invasive medical devices by high resolution three dimensional ultrasonic imaging |
| US8409094B2 (en) * | 2006-03-15 | 2013-04-02 | Kabushiki Kaisha Toshiba | Ultrasound diagnostic apparatus and method for displaying ultrasound image |
| US7831076B2 (en) * | 2006-12-08 | 2010-11-09 | Biosense Webster, Inc. | Coloring electroanatomical maps to indicate ultrasound data acquisition |
| CN101868737B (zh) * | 2007-11-16 | 2013-04-24 | 皇家飞利浦电子股份有限公司 | 使用3d对比增强超声的介入导航 |
| US9895135B2 (en) * | 2009-05-20 | 2018-02-20 | Analogic Canada Corporation | Freehand ultrasound imaging systems and methods providing position quality feedback |
| US20110245659A1 (en) * | 2010-04-01 | 2011-10-06 | Sonosite, Inc. | Systems and methods to assist with internal positioning of instruments |
| JP5889874B2 (ja) | 2010-05-03 | 2016-03-22 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 介入器具に搭載される超音波トランスデューサの超音波トラッキング |
| EP2575610B1 (en) | 2010-05-28 | 2022-10-05 | C. R. Bard, Inc. | Insertion guidance system for needles and medical components |
| JP2012075702A (ja) * | 2010-10-01 | 2012-04-19 | Fujifilm Corp | 管状構造物内画像再構成装置、管状構造物内画像再構成方法および管状構造物内画像再構成プログラム |
| WO2012143885A2 (en) * | 2011-04-21 | 2012-10-26 | Koninklijke Philips Electronics N.V. | Mpr slice selection for visualization of catheter in three-dimensional ultrasound |
| JP2014028125A (ja) * | 2012-06-29 | 2014-02-13 | Toshiba Corp | 超音波診断装置及び制御プログラム |
| US20140276003A1 (en) * | 2013-03-15 | 2014-09-18 | Chison Medical Imaging Co., Ltd. | Systems and Methods to Detect and Present Interventional Devices via Ultrasound Imaging |
| EP3013227B1 (en) * | 2013-06-28 | 2022-08-10 | Koninklijke Philips N.V. | Scanner independent tracking of interventional instruments |
| CN105828724B (zh) * | 2013-12-17 | 2019-12-31 | 皇家飞利浦有限公司 | 用于递送对象的系统和仪器以及用于检测递送的方法 |
| US20150173723A1 (en) * | 2013-12-20 | 2015-06-25 | General Electric Company | Method and system for automatic needle recalibration detection |
| CN111973225B (zh) * | 2014-01-02 | 2024-09-17 | 皇家飞利浦有限公司 | 相对超声成像平面的仪器对准和跟踪 |
| JP6305810B2 (ja) | 2014-03-31 | 2018-04-04 | キヤノンメディカルシステムズ株式会社 | 医用画像診断装置 |
| CN104161546A (zh) * | 2014-09-05 | 2014-11-26 | 深圳先进技术研究院 | 基于可定位穿刺针的超声探头标定系统及方法 |
| EP3009096A1 (en) * | 2014-10-17 | 2016-04-20 | Imactis | Method and system for displaying the position and orientation of a linear instrument navigated with respect to a 3D medical image |
-
2016
- 2016-12-02 CN CN201680073429.0A patent/CN108369273B/zh active Active
- 2016-12-02 EP EP16805126.6A patent/EP3391083B1/en active Active
- 2016-12-02 US US15/778,715 patent/US11275150B2/en active Active
- 2016-12-02 WO PCT/EP2016/079522 patent/WO2017102369A1/en active Application Filing
- 2016-12-02 JP JP2018530879A patent/JP6878434B2/ja active Active
-
2021
- 2021-04-28 JP JP2021075644A patent/JP7096395B2/ja active Active
-
2022
- 2022-02-17 US US17/673,955 patent/US11604249B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP7096395B2 (ja) | 2022-07-05 |
| EP3391083A1 (en) | 2018-10-24 |
| US11275150B2 (en) | 2022-03-15 |
| JP2021118891A (ja) | 2021-08-12 |
| US20220196789A1 (en) | 2022-06-23 |
| EP3391083B1 (en) | 2021-08-11 |
| CN108369273B (zh) | 2022-09-06 |
| JP2018537227A (ja) | 2018-12-20 |
| US20180356493A1 (en) | 2018-12-13 |
| CN108369273A (zh) | 2018-08-03 |
| US11604249B2 (en) | 2023-03-14 |
| WO2017102369A1 (en) | 2017-06-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7096395B2 (ja) | 介入デバイス認識 | |
| US12004899B2 (en) | Tracking a feature of an interventional device | |
| US20220346752A1 (en) | Ultrasound based tracking | |
| EP3967238B1 (en) | Rotation determination in an ultrasound beam | |
| WO2020030557A1 (en) | Tracking an interventional device respective an ultrasound image plane | |
| WO2020030746A1 (en) | Interventional device positioning using ultrasound signals | |
| CN113015489B (zh) | 用于在声学成像中估计介入设备的尖端的位置的系统和方法 | |
| JP7442498B2 (ja) | 超音波画像平面に対する介入装置の追跡 | |
| EP3833266B1 (en) | Interventional device positioning using ultrasound signals |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191129 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191129 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200908 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201006 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201221 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210401 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210428 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6878434 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |