JP6856575B2 - 能動的探索なしの強化学習に基づく制御ポリシー学習及び車両制御方法 - Google Patents
能動的探索なしの強化学習に基づく制御ポリシー学習及び車両制御方法 Download PDFInfo
- Publication number
- JP6856575B2 JP6856575B2 JP2018091189A JP2018091189A JP6856575B2 JP 6856575 B2 JP6856575 B2 JP 6856575B2 JP 2018091189 A JP2018091189 A JP 2018091189A JP 2018091189 A JP2018091189 A JP 2018091189A JP 6856575 B2 JP6856575 B2 JP 6856575B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- control
- policy
- collected data
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 113
- 230000002787 reinforcement Effects 0.000 title claims description 33
- 238000012545 processing Methods 0.000 claims description 114
- 230000006870 function Effects 0.000 claims description 113
- 230000015654 memory Effects 0.000 claims description 30
- 230000001186 cumulative effect Effects 0.000 claims description 14
- 230000004044 response Effects 0.000 claims description 5
- 230000003542 behavioural effect Effects 0.000 claims description 3
- 238000004891 communication Methods 0.000 description 23
- 230000009471 action Effects 0.000 description 19
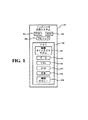
- 238000010586 diagram Methods 0.000 description 10
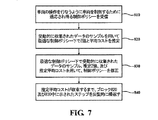
- 230000008569 process Effects 0.000 description 10
- 230000007246 mechanism Effects 0.000 description 9
- 230000001133 acceleration Effects 0.000 description 8
- 238000004422 calculation algorithm Methods 0.000 description 8
- 238000005457 optimization Methods 0.000 description 8
- 230000004048 modification Effects 0.000 description 7
- 238000012986 modification Methods 0.000 description 7
- 230000007704 transition Effects 0.000 description 7
- 238000013528 artificial neural network Methods 0.000 description 4
- 238000004590 computer program Methods 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 4
- 230000010354 integration Effects 0.000 description 4
- 230000006399 behavior Effects 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 230000001052 transient effect Effects 0.000 description 2
- 230000005653 Brownian motion process Effects 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000005537 brownian motion Methods 0.000 description 1
- 230000003139 buffering effect Effects 0.000 description 1
- 239000002283 diesel fuel Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 230000004927 fusion Effects 0.000 description 1
- 230000010365 information processing Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 238000010801 machine learning Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 230000001537 neural effect Effects 0.000 description 1
- 238000005312 nonlinear dynamic Methods 0.000 description 1
- 239000013307 optical fiber Substances 0.000 description 1
- 238000007781 pre-processing Methods 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 230000008080 stochastic effect Effects 0.000 description 1
Images







Landscapes
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/594,020 | 2017-05-12 | ||
| US15/594,020 US10061316B2 (en) | 2016-07-08 | 2017-05-12 | Control policy learning and vehicle control method based on reinforcement learning without active exploration |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019031268A JP2019031268A (ja) | 2019-02-28 |
| JP2019031268A5 JP2019031268A5 (enExample) | 2020-10-15 |
| JP6856575B2 true JP6856575B2 (ja) | 2021-04-07 |
Family
ID=65522935
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018091189A Active JP6856575B2 (ja) | 2017-05-12 | 2018-05-10 | 能動的探索なしの強化学習に基づく制御ポリシー学習及び車両制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6856575B2 (enExample) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102267316B1 (ko) * | 2019-03-05 | 2021-06-21 | 네이버랩스 주식회사 | 심층 강화 학습에 기반한 자율주행 에이전트의 학습 방법 및 시스템 |
| KR102463146B1 (ko) * | 2020-07-14 | 2022-11-03 | 중앙대학교 산학협력단 | 계층적 심화 강화학습을 이용한 hems 최적화 방법 및 장치 |
| JP7433205B2 (ja) * | 2020-12-17 | 2024-02-19 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| CN112590792B (zh) * | 2020-12-18 | 2024-05-10 | 的卢技术有限公司 | 一种基于深度强化学习算法的车辆汇合控制方法 |
| EP4278340A1 (en) * | 2021-09-10 | 2023-11-22 | Huawei Technologies Co., Ltd. | Simulation based method and data center to obtain geo-fenced driving policy |
| CN114735027B (zh) * | 2022-04-13 | 2025-08-19 | 北京京东乾石科技有限公司 | 应用于无人车的运行决策方法及装置 |
| CN115909780B (zh) * | 2022-11-09 | 2023-07-21 | 江苏大学 | 基于智能网联与rbf神经网络的高速路汇入控制系统与方法 |
| CN116843023B (zh) * | 2023-06-08 | 2025-09-19 | 南京航空航天大学 | 一种基于深度强化学习的航空发动机旋转部件健康参数更新方法 |
| CN116946162B (zh) * | 2023-09-19 | 2023-12-15 | 东南大学 | 考虑路面附着条件的智能网联商用车安全驾驶决策方法 |
| CN117911414B (zh) * | 2024-03-20 | 2024-10-15 | 安徽大学 | 一种基于强化学习的自动驾驶汽车运动控制方法 |
| CN118343164B (zh) * | 2024-06-17 | 2024-10-01 | 北京理工大学前沿技术研究院 | 一种自动驾驶车辆行为决策方法、系统、设备及存储介质 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7107107B2 (en) * | 2003-01-31 | 2006-09-12 | Matsushita Electric Industrial Co., Ltd. | Predictive action decision device and action decision method |
| JP2004348394A (ja) * | 2003-05-21 | 2004-12-09 | Toyota Central Res & Dev Lab Inc | 環境変化装置及び行動指針情報生成提示装置 |
| US10296004B2 (en) * | 2017-06-21 | 2019-05-21 | Toyota Motor Engineering & Manufacturing North America, Inc. | Autonomous operation for an autonomous vehicle objective in a multi-vehicle environment |
| US10235881B2 (en) * | 2017-07-28 | 2019-03-19 | Toyota Motor Engineering & Manufacturing North America, Inc. | Autonomous operation capability configuration for a vehicle |
-
2018
- 2018-05-10 JP JP2018091189A patent/JP6856575B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019031268A (ja) | 2019-02-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6856575B2 (ja) | 能動的探索なしの強化学習に基づく制御ポリシー学習及び車両制御方法 | |
| JP7036545B2 (ja) | 能動的探索なしの強化学習に基づくオンライン学習法及び車両制御方法 | |
| US10061316B2 (en) | Control policy learning and vehicle control method based on reinforcement learning without active exploration | |
| US11269329B2 (en) | Dynamic model with learning based localization correction system | |
| EP3835908B1 (en) | Automatic driving method, training method and related apparatuses | |
| CN110244701B (zh) | 用于基于自动生成的课程序列的自主车辆的强化学习的方法和装置 | |
| US20200363800A1 (en) | Decision Making Methods and Systems for Automated Vehicle | |
| US12346794B2 (en) | Systems and methods for predicting trajectories of multiple vehicles | |
| US11934191B2 (en) | Method and system for predictive control of vehicle using digital images | |
| US11891087B2 (en) | Systems and methods for generating behavioral predictions in reaction to autonomous vehicle movement | |
| CN112829769B (zh) | 自动驾驶车辆的混合规划系统 | |
| US11673584B2 (en) | Bayesian Global optimization-based parameter tuning for vehicle motion controllers | |
| US11815891B2 (en) | End dynamics and constraints relaxation algorithm on optimizing an open space trajectory | |
| US20200042656A1 (en) | Systems and methods for persistent simulation | |
| US12086695B2 (en) | System and method for training a multi-task model | |
| US20210200220A1 (en) | Multi-layer grid based open space planner | |
| US20240157973A1 (en) | System and method for determining a trajectory for a vehicle | |
| US12415538B2 (en) | Systems and methods for pareto domination-based learning | |
| US11262201B2 (en) | Location-based vehicle operation | |
| US12358532B2 (en) | Systems and methods for online monitoring using a neural model by an automated vehicle | |
| US11884287B2 (en) | Enhanced vehicle operation | |
| US20220258732A1 (en) | Cooperative driving system and method | |
| US20210103800A1 (en) | Certified adversarial robustness for deep reinforcement learning | |
| US12195019B2 (en) | On-board parameter tuning for control module for autonomous vehicles | |
| US12487598B2 (en) | Systems and methods for risk-bounded control barrier functions |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200903 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200903 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20200903 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20200923 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201117 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210202 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210216 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210318 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6856575 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |