JP6738332B2 - 対応確率マップ主導の視覚化 - Google Patents
対応確率マップ主導の視覚化 Download PDFInfo
- Publication number
- JP6738332B2 JP6738332B2 JP2017530013A JP2017530013A JP6738332B2 JP 6738332 B2 JP6738332 B2 JP 6738332B2 JP 2017530013 A JP2017530013 A JP 2017530013A JP 2017530013 A JP2017530013 A JP 2017530013A JP 6738332 B2 JP6738332 B2 JP 6738332B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- probability map
- image data
- correspondence
- data set
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012800 visualization Methods 0.000 title claims description 31
- 238000006073 displacement reaction Methods 0.000 claims description 25
- 238000000034 method Methods 0.000 claims description 13
- 230000005764 inhibitory process Effects 0.000 claims description 3
- 230000001629 suppression Effects 0.000 claims description 3
- 230000004044 response Effects 0.000 claims description 2
- 230000000007 visual effect Effects 0.000 claims description 2
- 238000004364 calculation method Methods 0.000 claims 5
- 238000005562 fading Methods 0.000 claims 4
- 230000001131 transforming effect Effects 0.000 claims 2
- 238000005457 optimization Methods 0.000 claims 1
- 230000003068 static effect Effects 0.000 claims 1
- 238000013459 approach Methods 0.000 description 9
- 238000003384 imaging method Methods 0.000 description 9
- 230000005855 radiation Effects 0.000 description 5
- 238000002591 computed tomography Methods 0.000 description 4
- 231100000915 pathological change Toxicity 0.000 description 4
- 230000036285 pathological change Effects 0.000 description 4
- 238000009472 formulation Methods 0.000 description 3
- 239000000203 mixture Substances 0.000 description 3
- 206010028980 Neoplasm Diseases 0.000 description 2
- 210000003484 anatomy Anatomy 0.000 description 2
- 239000002872 contrast media Substances 0.000 description 2
- 238000010191 image analysis Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 210000001519 tissue Anatomy 0.000 description 2
- 238000002604 ultrasonography Methods 0.000 description 2
- 230000004075 alteration Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 210000000988 bone and bone Anatomy 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000004927 fusion Effects 0.000 description 1
- 230000003902 lesion Effects 0.000 description 1
- 238000002595 magnetic resonance imaging Methods 0.000 description 1
- 238000002600 positron emission tomography Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 238000002603 single-photon emission computed tomography Methods 0.000 description 1
- 210000004872 soft tissue Anatomy 0.000 description 1
- 238000003325 tomography Methods 0.000 description 1
- 238000011179 visual inspection Methods 0.000 description 1
Images

Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0012—Biomedical image inspection
- G06T7/0014—Biomedical image inspection using an image reference approach
- G06T7/0016—Biomedical image inspection using an image reference approach involving temporal comparison
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T11/00—2D [Two Dimensional] image generation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T11/00—2D [Two Dimensional] image generation
- G06T11/003—Reconstruction from projections, e.g. tomography
- G06T11/008—Specific post-processing after tomographic reconstruction, e.g. voxelisation, metal artifact correction
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/30—Determination of transform parameters for the alignment of images, i.e. image registration
- G06T7/33—Determination of transform parameters for the alignment of images, i.e. image registration using feature-based methods
- G06T7/344—Determination of transform parameters for the alignment of images, i.e. image registration using feature-based methods involving models
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/30—Determination of transform parameters for the alignment of images, i.e. image registration
- G06T7/35—Determination of transform parameters for the alignment of images, i.e. image registration using statistical methods
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/30—Determination of transform parameters for the alignment of images, i.e. image registration
- G06T7/38—Registration of image sequences
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10072—Tomographic images
- G06T2207/10081—Computed x-ray tomography [CT]
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20076—Probabilistic image processing
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20212—Image combination
- G06T2207/20221—Image fusion; Image merging
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2210/00—Indexing scheme for image generation or computer graphics
- G06T2210/41—Medical
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2211/00—Image generation
- G06T2211/40—Computed tomography
- G06T2211/412—Dynamic
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Bioinformatics & Computational Biology (AREA)
- Probability & Statistics with Applications (AREA)
- Evolutionary Biology (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Medical Informatics (AREA)
- General Health & Medical Sciences (AREA)
- Health & Medical Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Quality & Reliability (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
Description
Claims (12)
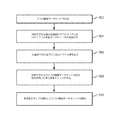
- 第1及び第2の画像データセットの視覚化に対して対応確率マップを生成及び使用する方法において、
前記第1及び第2の画像データセットを取得するステップと、
対応モデルを含む画像位置合わせアルゴリズムを取得するステップと、
前記第1及び第2の画像データセットに基づいて、前記対応モデルを使用して、対応確率マップを生成するステップと、
前記対応確率マップによる所定の閾値を満たさない対応を持つ画像領域を抑制することにより前記第1及び第2の画像データセットを視覚化するステップと、
を有する方法であって、
前記第2の画像データセット内のボクセル位置に対する前記第1の画像データセット内のボクセル位置の変位を規定する変位ベクトル場を生成するように前記第1及び第2の画像データセットを位置合わせするステップと、
前記第1の画像データセットと、前記変位ベクトル場を用いて変形された前記第2の画像データセットとの間の差に基づいて前記対応確率マップを計算する、又は前記第1の画像データセットと、前記変位ベクトル場を用いて変形された前記第2の画像データセットとの間の統合されたエッジマップに基づいて前記対応確率マップを計算する、ステップと、
を更に有する方法。 - 前記対応確率マップに前記変位ベクトル場を適用することにより第2の対応確率マップを生成するステップと、
第1の画像表示窓内に前記第1の画像データセットを表示するステップと、
前記対応確率マップを用いて対応を持つ前記第1の画像データセットの画像領域をフェードするステップと、
第2の画像表示窓内に前記第2の画像データセットを表示するステップと、
前記対応する画像領域に対する抑制のレベルに基づいて前記第2の対応確率マップを用いて対応を持つ前記第2の画像データセットの画像領域をフェードするステップと、
を有する、請求項1に記載の方法。 - 前記対応確率マップの少なくとも1つの値に対するユーザ変更を示すフィードバック信号を受信するステップと、
前記フィードバック信号に基づいて修正された対応確率マップを生成するステップと、
前記変位ベクトル場を生成するように前記修正された対応確率マップを用いて前記第1及び第2の画像データセットを再位置合わせするステップと、
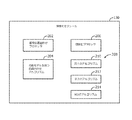
を有する、請求項1又は2のいずれか一項に記載の方法。 - 視覚化モジュールを含む命令を記憶するメモリ装置と、
前記命令を実行するプロセッサと、
を有する計算システムにおいて、
前記プロセッサが、
対応確率マップを生成するように対応モデルを含む画像位置合わせアルゴリズムを用いて第1及び第2の画像データセットを位置合わせし、
前記対応確率マップによる所定の閾値を満たさない対応を持つ前記第1及び第2の画像データセットの少なくとも一方における画像領域を抑制することにより前記第1及び第2の画像データセットを視覚化する、
計算システムであって、
前記プロセッサが更に、
前記第2の画像データセット内のボクセル位置に対する前記第1の画像データセット内のボクセル位置の変位を規定する変位ベクトル場を生成し、
前記第1の画像データセットと、前記変位ベクトル場を用いて変形された前記第2の画像データセットとの間の差に基づいて前記対応確率マップを計算する、又は前記第1の画像データセットと、前記変位ベクトル場を用いて変形された前記第2の画像データセットとの間の統合されたエッジマップに基づいて前記対応確率マップを計算する、
計算システム。 - 前記プロセッサが、前記2つの画像データセットの間の相関に基づいて前記対応確率マップを計算する、請求項4に記載の計算システム。
- 前記プロセッサが、
前記対応確率マップに前記変位ベクトル場を適用することにより第2の対応確率マップを生成し、
第1の画像表示窓内に前記第1の画像データセットを表示し、
前記対応確率マップを用いて対応を持つ前記第1の画像データセットの画像領域をフェードし、
第2の画像表示窓内に前記第2の画像データセットを表示し、
前記第2の対応確率マップを用いて対応を持つ前記第2の画像データセットの画像領域をフェードする、
請求項4又は5に記載の計算システム。 - 前記プロセッサが、
前記変位ベクトル場を用いて前記第1の画像データセットを変形し、
前記変形された第1の画像データセット及び前記第2の画像データセットを融合し、
前記対応確率マップを用いて対応を持つ前記融合された画像データセットの画像領域をフェードする、
請求項4又は5に記載の計算システム。 - 前記プロセッサが、
前記変位ベクトル場を用いて前記第1の画像データセットを変形し、
同じ画像観察窓において前記第1の画像データセット及び前記第2の画像データセットの表示を交互に入れ替え、
前記対応確率マップを用いて対応を持つ前記表示された第1及び第2の画像データセットの画像領域をフェードする、
請求項4又は5に記載の計算システム。 - 前記プロセッサが、前記対応する画像領域に対する抑制のレベルの変化を示す信号を受信し、前記信号に基づいて前記対応する画像領域に対する前記抑制のレベルを調整する、請求項6乃至8のいずれか一項に記載の計算システム。
- 前記プロセッサが、前記対応確率マップの少なくとも1つの値に対するユーザ変更を示す入力に応答して前記対応確率マップを修正し、これが、更新された対応確率マップを生成し、2つの画像データセットの視覚化に対して前記更新された対応確率マップを使用する、請求項6乃至9のいずれか一項に記載の計算システム。
- 前記プロセッサが、前記第1及び第2の画像データセットにユーザ生成マスク画像を加え、前記マスク画像が、重みを下げられるか又は重みを上げられるかのいずれかである少なくとも1つのボクセルを含み、前記プロセッサが、変化しない静止値を持つ前記対応確率マップの少なくとも1つの値を初期化するのに前記マスク画像を使用する、請求項4乃至10のいずれか一項に記載の計算システム。
- コンピュータ可読命令で符号化されたコンピュータ可読記憶媒体において、前記コンピュータ可読命令は、プロセッサにより実行される場合に、前記プロセッサに、
ベースライン及びフォローアップ画像データセットを取得させ、
対応モデルを含む画像位置合わせアルゴリズムを取得させ、
前記ベースライン及びフォローアップ画像データセットに基づいて前記対応モデルを使用して対応確率マップを生成するように前記ベースライン及びフォローアップ画像データセットを位置合わせさせ、
前記対応確率マップによる所定の閾値を満たさない対応を持つ画像領域を抑制することにより前記ベースライン及びフォローアップ画像データセットを表示させ、
前記コンピュータ可読命令は更に、前記プロセッサに、
前記フォローアップ画像データセット内のボクセル位置に対する前記第ベースライン画像データセット内のボクセル位置の変位を規定する変位ベクトル場を生成させ、
前記ベースライン画像データセットと、前記変位ベクトル場を用いて変形された前記フォローアップ画像データセットとの間の差に基づいて前記対応確率マップを計算させる、又は前記ベースライン画像データセットと、前記変位ベクトル場を用いて変形された前記フォローアップ画像データセットとの間の統合されたエッジマップに基づいて前記対応確率マップを計算させる、
コンピュータ可読記憶媒体。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201462092482P | 2014-12-16 | 2014-12-16 | |
| US62/092,482 | 2014-12-16 | ||
| PCT/IB2015/059274 WO2016097912A1 (en) | 2014-12-16 | 2015-12-02 | Correspondence probability map driven visualization |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018500082A JP2018500082A (ja) | 2018-01-11 |
| JP2018500082A5 JP2018500082A5 (ja) | 2018-12-06 |
| JP6738332B2 true JP6738332B2 (ja) | 2020-08-12 |
Family
ID=54979881
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017530013A Active JP6738332B2 (ja) | 2014-12-16 | 2015-12-02 | 対応確率マップ主導の視覚化 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10430947B2 (ja) |
| EP (1) | EP3234918A1 (ja) |
| JP (1) | JP6738332B2 (ja) |
| CN (1) | CN107111881B (ja) |
| WO (1) | WO2016097912A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10430947B2 (en) * | 2014-12-16 | 2019-10-01 | Koninklijke Philips N.V. | Correspondence probability map driven visualization |
| US11064979B2 (en) * | 2016-05-16 | 2021-07-20 | Analogic Corporation | Real-time anatomically based deformation mapping and correction |
| US20180060535A1 (en) * | 2016-08-31 | 2018-03-01 | International Business Machines Corporation | Updating probabilities of conditions based on annotations on medical images |
| AU2016266019A1 (en) * | 2016-11-30 | 2018-06-14 | Canon Kabushiki Kaisha | Image registration method |
| EP3474227B1 (en) * | 2017-10-22 | 2021-05-05 | RaySearch Laboratories AB | A method, computer program product and computer system for correcting a ct image |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3658696B2 (ja) | 1996-03-29 | 2005-06-08 | 能美防災株式会社 | 防災設備 |
| US6771736B2 (en) | 2002-07-25 | 2004-08-03 | Ge Medical Systems Global Technology Company, Llc | Method for displaying temporal changes in spatially matched images |
| JP2005224429A (ja) * | 2004-02-13 | 2005-08-25 | Fuji Photo Film Co Ltd | 異常陰影判定装置およびそのプログラム |
| EP1952340B1 (en) * | 2005-11-21 | 2012-10-24 | Agency for Science, Technology and Research | Superimposing brain atlas images and brain images with delineation of infarct and penumbra for stroke diagnosis |
| US20070165943A1 (en) * | 2006-01-17 | 2007-07-19 | Christoph Guetter | System and method for image registration using nonparametric priors and statistical learning techniques |
| US8135199B2 (en) * | 2006-12-19 | 2012-03-13 | Fujifilm Corporation | Method and apparatus of using probabilistic atlas for feature removal/positioning |
| DE102007015306A1 (de) * | 2007-03-27 | 2008-10-02 | Siemens Ag | Ermittlungsverfahren für einen zeitlichen Verlauf einer örtlich dreidimensional aufgelösten Anwesenheitswahrscheinlichkeitsverteilung einer Substanz in einem Gefäßsystem |
| US8064673B2 (en) * | 2008-10-15 | 2011-11-22 | Siemens Aktiengesellschaft | Combined segmentation and registration framework for parametric shapes |
| US20100266188A1 (en) * | 2009-04-17 | 2010-10-21 | Riverain Medical Group, Llc | Chest x-ray registration, subtraction and display |
| US9129360B2 (en) * | 2009-06-10 | 2015-09-08 | Koninklijke Philips N.V. | Visualization apparatus for visualizing an image data set |
| JP5551960B2 (ja) * | 2009-09-30 | 2014-07-16 | 富士フイルム株式会社 | 診断支援システム、診断支援プログラムおよび診断支援方法 |
| JP5931755B2 (ja) * | 2010-03-11 | 2016-06-08 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | モデルベースのセグメント化の確率向上 |
| US9171377B2 (en) * | 2010-07-09 | 2015-10-27 | Koninklijke Philips N.V. | Automatic point-wise validation of respiratory motion estimation |
| CN101916443B (zh) * | 2010-08-19 | 2012-10-17 | 中国科学院深圳先进技术研究院 | Ct图像的处理方法及系统 |
| CN102525525B (zh) * | 2010-12-31 | 2015-09-23 | Ge医疗系统环球技术有限公司 | 在定位图像上设置定位线的方法和装置及ct设备 |
| JP2013119021A (ja) * | 2011-12-09 | 2013-06-17 | Hitachi Medical Corp | X線ct装置及び画像処理方法 |
| US8965093B2 (en) * | 2011-12-21 | 2015-02-24 | Institute Of Automation, Chinese Academy Of Sciences | Method for registering functional MRI data |
| CN102525662B (zh) * | 2012-02-28 | 2013-09-04 | 中国科学院深圳先进技术研究院 | 组织器官三维可视化手术导航系统 |
| US8605972B2 (en) | 2012-03-02 | 2013-12-10 | Sony Corporation | Automatic image alignment |
| US8755633B2 (en) | 2012-03-14 | 2014-06-17 | Sony Corporation | Automated synchronized navigation system for digital pathology imaging |
| US10304217B2 (en) * | 2012-07-30 | 2019-05-28 | Toshiba Medical Systems Corporation | Method and system for generating image using filtered backprojection with noise weighting and or prior in |
| US9706968B2 (en) * | 2013-03-15 | 2017-07-18 | Koninklijke Philips N.V. | Determining a residual mode image from a dual energy image |
| US10430947B2 (en) * | 2014-12-16 | 2019-10-01 | Koninklijke Philips N.V. | Correspondence probability map driven visualization |
-
2015
- 2015-12-02 US US15/535,438 patent/US10430947B2/en active Active
- 2015-12-02 JP JP2017530013A patent/JP6738332B2/ja active Active
- 2015-12-02 WO PCT/IB2015/059274 patent/WO2016097912A1/en active Application Filing
- 2015-12-02 CN CN201580069219.XA patent/CN107111881B/zh active Active
- 2015-12-02 EP EP15813917.0A patent/EP3234918A1/en not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| US20170365058A1 (en) | 2017-12-21 |
| WO2016097912A1 (en) | 2016-06-23 |
| EP3234918A1 (en) | 2017-10-25 |
| US10430947B2 (en) | 2019-10-01 |
| CN107111881A (zh) | 2017-08-29 |
| JP2018500082A (ja) | 2018-01-11 |
| CN107111881B (zh) | 2021-06-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9754390B2 (en) | Reconstruction of time-varying data | |
| US10896504B2 (en) | Image processing apparatus, medical image diagnostic apparatus, and program | |
| JP6738332B2 (ja) | 対応確率マップ主導の視覚化 | |
| US10867375B2 (en) | Forecasting images for image processing | |
| US9478048B2 (en) | Prior image based three dimensional imaging | |
| JP2018011958A (ja) | 医用画像処理装置及び医用画像処理プログラム | |
| US20130190602A1 (en) | 2d3d registration for mr-x ray fusion utilizing one acquisition of mr data | |
| JP6302934B2 (ja) | コンピュータ支援による関心組織の特定 | |
| US10275946B2 (en) | Visualization of imaging uncertainty | |
| Babin et al. | Brain blood vessel segmentation using line-shaped profiles | |
| WO2018137759A1 (en) | Determining rotational orientation of a deep brain stimulation electrode in a three-dimensional image | |
| CN105849778B (zh) | 成像中的移动结构运动补偿 | |
| US9691157B2 (en) | Visualization of anatomical labels | |
| JP2017534316A (ja) | 画像レポート注釈同定 | |
| JP6747785B2 (ja) | 医用画像処理装置及び医用画像処理方法 | |
| Hong et al. | Overcoming the challenges in the development and implementation of artificial intelligence in radiology: a comprehensive review of solutions beyond supervised learning | |
| Xue et al. | Joint registration and segmentation of serial lung CT images for image-guided lung cancer diagnosis and therapy | |
| Lewis et al. | Improving tuberculosis (TB) prediction using synthetically generated computed tomography (CT) images | |
| JP2019527885A (ja) | スペクトルコンピュータ断層撮影フィンガープリンティング | |
| Ryu et al. | Multi-planar 2.5 D U-Net for image quality enhancement of dental cone-beam CT | |
| Naseem | Cross-modality guided Image Enhancement | |
| Kan | Organ segmentation of pediatric computed tomography (ct) with generative adversarial networks |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181026 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181026 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190828 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191001 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20191219 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200401 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200625 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200717 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6738332 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |