JP6729063B2 - 遊星歯車機構 - Google Patents
遊星歯車機構 Download PDFInfo
- Publication number
- JP6729063B2 JP6729063B2 JP2016126590A JP2016126590A JP6729063B2 JP 6729063 B2 JP6729063 B2 JP 6729063B2 JP 2016126590 A JP2016126590 A JP 2016126590A JP 2016126590 A JP2016126590 A JP 2016126590A JP 6729063 B2 JP6729063 B2 JP 6729063B2
- Authority
- JP
- Japan
- Prior art keywords
- planetary gear
- gear mechanism
- central axis
- axis direction
- mechanism according
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000002093 peripheral effect Effects 0.000 claims description 5
- 230000008878 coupling Effects 0.000 claims description 4
- 238000010168 coupling process Methods 0.000 claims description 4
- 238000005859 coupling reaction Methods 0.000 claims description 4
- 239000003638 chemical reducing agent Substances 0.000 description 5
- 229920003002 synthetic resin Polymers 0.000 description 4
- 239000000057 synthetic resin Substances 0.000 description 4
- 229920000106 Liquid crystal polymer Polymers 0.000 description 2
- 239000004977 Liquid-crystal polymers (LCPs) Substances 0.000 description 2
- 239000004734 Polyphenylene sulfide Substances 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 239000004417 polycarbonate Substances 0.000 description 2
- 229920000139 polyethylene terephthalate Polymers 0.000 description 2
- 239000005020 polyethylene terephthalate Substances 0.000 description 2
- 229920006324 polyoxymethylene Polymers 0.000 description 2
- 229920000069 polyphenylene sulfide Polymers 0.000 description 2
- 229920000049 Carbon (fiber) Polymers 0.000 description 1
- 229930182556 Polyacetal Natural products 0.000 description 1
- 239000004952 Polyamide Substances 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 239000004917 carbon fiber Substances 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 239000003365 glass fiber Substances 0.000 description 1
- VNWKTOKETHGBQD-UHFFFAOYSA-N methane Chemical compound C VNWKTOKETHGBQD-UHFFFAOYSA-N 0.000 description 1
- 229920002647 polyamide Polymers 0.000 description 1
- 229920000515 polycarbonate Polymers 0.000 description 1
- -1 polyethylene terephthalate Polymers 0.000 description 1
- 238000004080 punching Methods 0.000 description 1
- 238000005549 size reduction Methods 0.000 description 1
Images




Landscapes
- Retarders (AREA)
Description
駆動源から回転駆動力を受ける太陽歯車と、内歯歯車と、遊星歯車と、キャリアとからなる複数の遊星歯車ユニットと、
一端に前記駆動源を取り付ける取り付け部と他端に被取り付け体と締結する締結部を有し、前記内歯歯車の回転を禁止して前記遊星歯車ユニットを中心軸線方向に重ね合わせて固定する固定部材と、を備えた、
ことを特徴とする。
前記固定部材は、前記取り付け部が設けられた円板部と、基端が前記円板部の周方向に等間隔に連結され前記中心軸線方向に延びる複数の帯部材と、前記帯部材の他端で前記円板部と相対して前記中心軸線方向と交差する方向に延びる脚部と、からなる、
ことを特徴とする。
前記円板部は、前記駆動源が有するインロー部に嵌合して位置決めされる位置決め孔を有する、
ことを特徴とする。
前記脚部は、前記中心軸線方向に突出し前記遊星歯車ユニットに設けられた係合溝に嵌まり込む係合凸部を有する、
ことを特徴とする。
前記脚部は、前記中心軸線方向に向かって突出する位置決め突起を有し、前記遊星歯車ユニットに設けられた係合穴に位置決めされる、
ことを特徴とする。
前記帯部材は、前記内歯歯車の外周面に形成された凹形状と嵌まり合って前記内歯歯車の回転を禁止する、
ことを特徴とする。
請求項2に記載の発明によれば、複数の遊星歯車ユニットを重ね合わせて位置決めした状態で固定することができる。
請求項3に記載の発明によれば、駆動源が有するインロー部に嵌合して位置決めされる位置決め孔を有しない構成に比して、組立て誤差を抑制することができる。
請求項4に記載の発明によれば、係合溝に嵌まり込む係合凸部を有しない構成に比して、複数の遊星歯車ユニットを重ね合わせて強固に固定することができる。
請求項5に記載の発明によれば、位置決め突起を有しない構成に比して、固定部材と遊星歯車ユニットとを容易に位置決めすることができる。
請求項6に記載の発明によれば、小型化を図りながら確実に内歯歯車を回転不能に位置決めすることができる。
また、以下の図面を使用した説明において、図面は模式的なものであり、各寸法の比率等は現実のものとは異なることに留意すべきであり、理解の容易のために説明に必要な部材以外の図示は適宜省略されている。
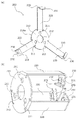
図1(a)は出力軸160側に視点をおいた遊星歯車機構1の斜視図、(b)は駆動源側に視点をおいた斜視図、図2(a)は遊星歯車機構1の一例を示す縦断面模式図、(b)は横断面斜視図、図3は出力軸160側に視点をおいた遊星歯車ユニット100の斜視図、図4(a)は固定部材200の展開斜視図、(b)は遊星歯車ユニット100を固定する状態の固定部材200を示す斜視図である。以下、図面を参照しながら、遊星歯車機構1の全体構成及び動作を説明する。
各図には、複数の遊星歯車ユニット100を重ね合せて3段構成とした遊星歯車機構1の例が示されているが、本実施形態に係る遊星歯車機構1は必要とされる減速比に応じて複数の遊星歯車ユニット100を重ね合わせて構成することができる。
遊星歯車機構1は、図1に示すように、中心軸線方向に重ね合わされた複数の遊星歯車ユニット100が固定部材200で挟み込まれた状態で固定された駆動伝達装置である。
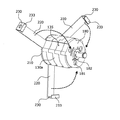
図2に示すように、遊星歯車機構1は、太陽歯車120、内歯歯車130、遊星歯車140、キャリア150からなる複数の遊星歯車ユニット100と、重ね合わされた遊星歯車ユニット100を入力側(駆動源側)及び出力側(被取り付け体側)で保持する第1カバー体170、第2カバー体180と、重ね合わされた遊星歯車ユニット100を第1カバー体170及び第2カバー体180を介して中心軸方向に沿って挟み込んで固定する固定部材200と、最終段の遊星歯車ユニット100のキャリア150に固定された出力軸160、から構成されている。
位置決め突起231は、被取り付け体と締結する締結部としての締結孔232と同軸にバーリング加工された円筒体であり、第2カバー体180に形成された位置決め穴181に嵌まり合うことで脚部230が第2カバー体180に位置決めされる。係合凸部233は、第2カバー体180に形成された係合溝182に係合して脚部230が強固に固定される。
固定部材200は、金属性の薄板部材を金型で打ち抜いて形成される。
固定部材200の円板部210に取り付けられたモータMの駆動で太陽歯車120が回転駆動されると、3つの遊星歯車140の各々が、自身の支持軸141を回転中心として自転する。また、3つの遊星歯車140の各々は、内歯歯車130の内歯133と噛み合っているために、中心軸線を中心として公転する。
そして、3つの遊星歯車140の公転が開始されると、遊星歯車140を支持するキャリア150は、内歯歯車130の内面132に当接支持されて太陽歯車120の回転に対し減速回転を開始する。
そして、2段目の遊星歯車ユニット100では、2段目の内歯歯車130と2段目の太陽歯車120Aとに噛み合う2段目の遊星歯車140が、2段目のキャリア150により支持されて、自転しながら2段目の太陽歯車120Aの外周を公転する。そして、公転する遊星歯車140を支持する2段目のキャリア150が減速回転する。
図5は遊星歯車機構1における遊星歯車ユニット100の固定を説明する斜視図、図6(a)は駆動源の斜視図、(b)は駆動源が取り付けられた遊星歯車機構1の斜視図である。
それぞれの遊星歯車ユニット100同士は、それぞれの内歯歯車130の筒体131に形成された凹形状131aと凸形状131bが嵌まり合って回転方向に対して位置決めされた状態で、第1カバー体170及と第2カバー体180で保持される。
100・・・遊星歯車ユニット
120、120A・・・太陽歯車
130・・・内歯歯車
130a・・・外周面
133・・・内歯
135・・・係合凹部(内歯歯車)
140・・・遊星歯車
150・・・キャリア
160・・・出力軸
170・・・第1カバー体
180・・・第2カバー体
200・・・固定部材
210・・・円板部
211・・・取り付け孔
212・・・位置決め孔
220・・・帯部材
230・・・脚部
231・・・位置決め突起
232・・・締結孔
233・・・係合凸部
M・・・モータ
Claims (6)
- 駆動源から回転駆動力を受ける太陽歯車と、内歯歯車と、遊星歯車と、キャリアとからなる複数の遊星歯車ユニットと、
一端に前記駆動源を取り付ける取り付け部と他端に被取り付け体と締結する締結部を有し、前記内歯歯車の回転を禁止して前記遊星歯車ユニットを中心軸線方向に重ね合わせて固定する固定部材と、を備えた、
ことを特徴とする遊星歯車機構。 - 前記固定部材は、前記取り付け部が設けられた円板部と、基端が前記円板部の周方向に等間隔に連結され前記中心軸線方向に延びる複数の帯部材と、前記帯部材の他端で前記円板部と相対して前記中心軸線方向と交差する方向に延びる脚部と、からなる、
ことを特徴とする請求項1に記載の遊星歯車機構。 - 前記円板部は、前記駆動源が有するインロー部に嵌合して位置決めされる位置決め孔を有する、
ことを特徴とする請求項2に記載の遊星歯車機構。 - 前記脚部は、前記中心軸線方向に突出し前記遊星歯車ユニットに設けられた係合溝に嵌まり込む係合凸部を有する、
ことを特徴とする請求項2に記載の遊星歯車機構。 - 前記脚部は、前記中心軸線方向に向かって突出する位置決め突起を有し、前記遊星歯車ユニットに設けられた係合穴に位置決めされる、
ことを特徴とする請求項2又は3に記載の遊星歯車機構。 - 前記帯部材は、前記内歯歯車の外周面に形成された凹形状と嵌まり合って前記内歯歯車の回転を禁止する、
ことを特徴とする請求項2ないし5のいずれか1項に記載の遊星歯車機構。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016126590A JP6729063B2 (ja) | 2016-06-27 | 2016-06-27 | 遊星歯車機構 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016126590A JP6729063B2 (ja) | 2016-06-27 | 2016-06-27 | 遊星歯車機構 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018003858A JP2018003858A (ja) | 2018-01-11 |
| JP6729063B2 true JP6729063B2 (ja) | 2020-07-22 |
Family
ID=60944905
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016126590A Active JP6729063B2 (ja) | 2016-06-27 | 2016-06-27 | 遊星歯車機構 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6729063B2 (ja) |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004011845A (ja) * | 2002-06-10 | 2004-01-15 | Matsushita Electric Ind Co Ltd | 遊星歯車減速機及びそれを用いた電池駆動機器 |
| DE102009052898B4 (de) * | 2009-11-13 | 2011-12-29 | Saia-Burgess Dresden Gmbh | Mehrstufiges Planetengetriebe |
| US8323143B2 (en) * | 2009-12-02 | 2012-12-04 | Fairfield Manufacturing Company, Inc. | Integrated spindle-carrier electric wheel drive |
| JP5480845B2 (ja) * | 2011-05-27 | 2014-04-23 | シナノケンシ株式会社 | 遊星歯車機構 |
| JP2015183830A (ja) * | 2014-03-26 | 2015-10-22 | Ntn株式会社 | インホイールモータ駆動装置 |
-
2016
- 2016-06-27 JP JP2016126590A patent/JP6729063B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018003858A (ja) | 2018-01-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9815192B1 (en) | Servo and robot with servo | |
| CN108713115B (zh) | 行星齿轮机构 | |
| US8100807B2 (en) | Reduction gear transmission and solar tracking photovoltaic power generation unit utilizing the same | |
| TWI612228B (zh) | 軸承機構及諧波齒輪裝置 | |
| KR101449392B1 (ko) | 감속기 | |
| US9989141B2 (en) | Fastening structure for fastening driven member to strain wave gearing device unit, and strain wave gearing device unit | |
| WO2018194112A1 (ja) | 波動歯車減速機ユニット及びそれを備えた動力ユニット | |
| WO2012036033A1 (ja) | 遊星歯車装置 | |
| WO2014133118A1 (ja) | モータ装置 | |
| WO2004079224A1 (ja) | 歯車装置 | |
| CN213017530U (zh) | 内啮合传动机构 | |
| TWI711776B (zh) | 具備諧波齒輪減速機的旋轉致動器 | |
| JP2015110382A (ja) | 車輪駆動装置 | |
| JP5480845B2 (ja) | 遊星歯車機構 | |
| CN105822726A (zh) | 减速机构和带减速机的驱动装置 | |
| JP6729063B2 (ja) | 遊星歯車機構 | |
| JP6228588B2 (ja) | 減速装置並びにこれを備えるギヤドモータ、電子機器及びロボット | |
| WO1999020917A1 (fr) | Dispositif d'embrayage flexible en forme de chapeau haut-de-forme | |
| JP6120618B2 (ja) | 遊星ギヤ装置 | |
| JP2014081001A (ja) | 減速機 | |
| KR20130021325A (ko) | 기어드 모터 및 그 제조 방법 | |
| JP6598215B2 (ja) | カム装置、及び、カム装置の製造方法 | |
| JP5520494B2 (ja) | デファレンシャル装置 | |
| JP6148443B2 (ja) | 減速機構、及び減速機付モータ | |
| JP2016186313A (ja) | 動力伝達装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190423 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200213 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200218 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200408 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200602 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200615 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6729063 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |