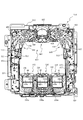
以下、本発明の実施形態について、添付図面を参照して説明する。まず、図1から図39を参照し、第1実施形態として、本発明をパチンコ遊技機(以下、単に「パチンコ機」という)10に適用した場合の一実施形態について説明する。図1は、第1実施形態におけるパチンコ機10の正面図であり、図2はパチンコ機10の遊技盤13の正面図であり、図3はパチンコ機10の背面図である。
図1に示すように、パチンコ機10は、略矩形状に組み合わせた木枠により外殻が形成される外枠11と、その外枠11と略同一の外形形状に形成され外枠11に対して開閉可能に支持された内枠12とを備えている。外枠11には、内枠12を支持するために正面視(図1参照)左側の上下2カ所に金属製のヒンジ18が取り付けられ、そのヒンジ18が設けられた側を開閉の軸として内枠12が正面手前側へ開閉可能に支持されている。
内枠12には、多数の釘や入賞口63,64等を有する遊技盤13(図2参照)が裏面側から着脱可能に装着される。この遊技盤13の前面を球(遊技球)が流下することにより弾球遊技が行われる。なお、内枠12には、球を遊技盤13の前面領域に発射する球発射ユニット112a(図4参照)やその球発射ユニット112aから発射された球を遊技盤13の前面領域まで誘導する発射レール(図示せず)等が取り付けられている。
内枠12の前面側には、その前面上側を覆う前面枠14と、その下側を覆う下皿ユニット15とが設けられている。前面枠14および下皿ユニット15を支持するために正面視(図1参照)左側の上下2カ所に金属製のヒンジ19が取り付けられ、そのヒンジ19が設けられた側を開閉の軸として前面枠14および下皿ユニット15が正面手前側へ開閉可能に支持されている。なお、内枠12の施錠と前面枠14の施錠とは、シリンダ錠20の鍵穴21に専用の鍵を差し込んで所定の操作を行うことでそれぞれ解除される。
前面枠14は、装飾用の樹脂部品や電気部品等を組み付けたものであり、その略中央部には略楕円形状に開口形成された窓部14cが設けられている。前面枠14の裏面側には2枚の板ガラス16aを有するガラスユニット16が配設され、そのガラスユニット16を介して遊技盤13の前面がパチンコ機10の正面側に視認可能となっている。
前面枠14には、球を貯留する上皿17が前方へ張り出して上面を開放した略箱状に形成されており、この上皿17に賞球や貸出球などが排出される。上皿17の底面は正面視(図1参照)右側に下降傾斜して形成され、その傾斜により上皿17に投入された球が球発射ユニット112a(図4参照)へと案内される。また、上皿17の上面には、枠ボタン22が設けられている。この枠ボタン22は、例えば、第3図柄表示装置81(図2参照)で表示される演出のステージを変更したり、スーパーリーチの演出内容を変更したりする場合などに、遊技者により操作される。
前面枠14には、その周囲(例えばコーナー部分)に各種ランプ等の発光手段が設けられている。これら発光手段は、大当たり時や所定のリーチ時等における遊技状態の変化に応じて、点灯又は点滅することにより発光態様が変更制御され、遊技中の演出効果を高める役割を果たす。窓部14cの周縁には、LED等の発光手段を内蔵した電飾部29〜33が設けられている。パチンコ機10においては、これら電飾部29〜33が大当たりランプ等の演出ランプとして機能し、大当たり時やリーチ演出時等には内蔵するLEDの点灯や点滅によって各電飾部29〜33が点灯または点滅して、大当たり中である旨、或いは大当たり一歩手前のリーチ中である旨が報知される。また、前面枠14の正面視(図1参照)左上部には、LED等の発光手段が内蔵され賞球の払い出し中とエラー発生時とを表示可能な表示ランプ34が設けられている。
また、右側の電飾部32下側には、前面枠14の裏面側を視認できるように裏面側より透明樹脂を取り付けて小窓35が形成され、遊技盤13前面の貼着スペースK1(図2参照)に貼付される証紙等がパチンコ機10の前面から視認可能とされている。また、パチンコ機10においては、より煌びやかさを醸し出すために、電飾部29〜33の周りの領域にクロムメッキを施したABS樹脂製のメッキ部材36が取り付けられている。
窓部14cの下方には、貸球操作部40が配設されている。貸球操作部40には、度数表示部41と、球貸しボタン42と、返却ボタン43とが設けられている。パチンコ機10の側方に配置されるカードユニット(球貸しユニット)(図示せず)に紙幣やカード等を投入した状態で貸球操作部40が操作されると、その操作に応じて球の貸出が行われる。具体的には、度数表示部41はカード等の残額情報が表示される領域であり、内蔵されたLEDが点灯して残額情報として残額が数字で表示される。球貸しボタン42は、カード等(記録媒体)に記録された情報に基づいて貸出球を得るために操作されるものであり、カード等に残額が存在する限りにおいて貸出球が上皿17に供給される。返却ボタン43は、カードユニットに挿入されたカード等の返却を求める際に操作される。なお、カードユニットを介さずに球貸し装置等から上皿17に球が直接貸し出されるパチンコ機、いわゆる現金機では貸球操作部40が不要となるが、この場合には、貸球操作部40の設置部分に飾りシール等を付加して部品構成は共通のものとしても良い。カードユニットを用いたパチンコ機と現金機との共通化を図ることができる。
上皿17の下側に位置する下皿ユニット15には、その中央部に上皿17に貯留しきれなかった球を貯留するための下皿50が上面を開放した略箱状に形成されている。下皿50の右側には、球を遊技盤13の前面へ打ち込むために遊技者によって操作される操作ハンドル51が配設される。
操作ハンドル51の内部には、球発射ユニット112aの駆動を許可するためのタッチセンサ51aと、押下操作している期間中には球の発射を停止する発射停止スイッチ51bと、操作ハンドル51の回動操作量(回動位置)を電気抵抗の変化により検出する可変抵抗器(図示せず)などが内蔵されている。操作ハンドル51が遊技者によって右回りに回動操作されると、タッチセンサ51aがオンされると共に可変抵抗器の抵抗値が回動操作量に対応して変化し、その可変抵抗器の抵抗値に対応した強さ(発射強度)で球が発射され、これにより遊技者の操作に対応した飛び量で遊技盤13の前面へ球が打ち込まれる。また、操作ハンドル51が遊技者により操作されていない状態においては、タッチセンサ51aおよび発射停止スイッチ51bがオフとなっている。
下皿50の正面下方部には、下皿50に貯留された球を下方へ排出する際に操作するための球抜きレバー52が設けられている。この球抜きレバー52は、常時、右方向に付勢されており、その付勢に抗して左方向へスライドさせることにより、下皿50の底面に形成された底面口が開口して、その底面口から球が自然落下して排出される。この球抜きレバー52の操作は、通常、下皿50の下方に下皿50から排出された球を受け取る箱(一般に「千両箱」と称される)を置いた状態で行われる。下皿50の右方には、上述したように操作ハンドル51が配設され、下皿50の左方には灰皿53が取り付けられている。
図2に示すように、遊技盤13は、正面視略正方形状に切削加工したベース板60に、球案内用の多数の釘(図示せず)や風車の他、レール61,62、一般入賞口63、第1入賞口64、第2入賞口640、第3入賞口82、可変入賞装置65、第1スルーゲート66、第2スルーゲート67、可変表示装置ユニット80等を組み付けて構成され、その周縁部が内枠12(図1参照)の裏面側に取り付けられる。ベース板60は薄い板材を張り合わせた木材からなり、その正面側からベース板60の背面側に配設された各種構造体を遊技者に目視できないように形成される。一般入賞口63、第1入賞口64、第2入賞口640、第3入賞口82、可変入賞装置65、可変表示装置ユニット80は、ルータ加工によってベース板60に形成された貫通穴に配設され、遊技盤13の前面側からタッピングネジ等により固定されている。
遊技盤13の前面中央部分は、前面枠14の窓部14c(図1参照)を通じて内枠12の前面側から視認することができる。以下に、主に図2を参照して、遊技盤13の構成について説明する。
遊技盤13の前面には、帯状の金属板を略円弧状に屈曲加工して形成した外レール62が植立され、その外レール62の内側位置には外レール62と同様に帯状の金属板で形成した円弧状の内レール61が植立される。この内レール61と外レール62とにより遊技盤13の前面外周が囲まれ、遊技盤13とガラスユニット16(図1参照)とにより前後が囲まれることにより、遊技盤13の前面には、球の挙動により遊技が行われる遊技領域が形成される。遊技領域は、遊技盤13の前面であって2本のレール61,62とレール間を繋ぐ樹脂製の外縁部材73とにより区画して形成される領域(入賞口等が配設され、発射された球が流下する領域)である。
2本のレール61,62は、球発射ユニット112a(図4参照)から発射された球を遊技盤13上部へ案内するために設けられたものである。内レール61の先端部分(図2の左上部)には戻り球防止部材68が取り付けられ、一旦、遊技盤13の上部へ案内された球が再度球案内通路内に戻ってしまうといった事態が防止される。外レール62の先端部(図2の右上部)には、球の最大飛翔部分に対応する位置に返しゴム69が取り付けられ、所定以上の勢いで発射された球は、返しゴム69に当たって、勢いが減衰されつつ中央部側へ跳ね返される。
遊技領域の正面視左側下部(図2の左側下部)には、発光手段である複数のLEDおよび7セグメント表示器を備える第1図柄表示装置37A,37Bが配設されている。第1図柄表示装置37A,37Bは、主制御装置110(図4参照)で行われる各制御に応じた表示がなされるものであり、主にパチンコ機10の遊技状態の表示が行われる。本実施形態では、第1図柄表示装置37A,37Bは、球が、第1入賞口64へ入賞したか、第2入賞口640および第3入賞口82へ入賞したかに応じて使い分けられるように構成されている。具体的には、球が、第1入賞口64へ入賞した場合には、第1図柄表示装置37Aが作動し、一方で、球が、第2入賞口640および第3入賞口82へ入賞した場合には、第1図柄表示装置37Bが作動するように構成されている。
また、第1図柄表示装置37A,37Bは、LEDにより、パチンコ機10が確変中か時短中か通常中であるかを点灯状態により示したり、変動中であるか否かを点灯状態により示したり、停止図柄が確変大当たりに対応した図柄か普通大当たりに対応した図柄か外れ図柄であるかを点灯状態により示したり、保留球数を点灯状態により示すと共に、7セグメント表示装置により、大当たり中のラウンド数やエラー表示を行う。なお、複数のLEDは、それぞれのLEDの発光色(例えば、赤、緑、青)が異なるよう構成され、その発光色の組み合わせにより、少ないLEDでパチンコ機10の各種遊技状態を示唆することができる。
なお、本パチンコ機10では、第1入賞口64,第2入賞口640,第3入賞口82,のいずれかに入賞があったことを契機として抽選が行われる。パチンコ機10は、その抽選において、大当たりか否かの当否判定(大当たり抽選)を行うと共に、大当たりと判定した場合はその大当たり種別の判定も行う。ここで判定される大当たり種別としては、15R確変大当たり、4R確変大当たり、15R通常大当たりが用意されている。第1図柄表示装置37A,37Bには、変動終了後の停止図柄として抽選の結果が大当たりであるか否かが示されるだけでなく、大当たりである場合はその大当たり種別に応じた図柄が示される。
ここで、「15R確変大当たり」とは、最大ラウンド数が15ラウンドの大当たりの後に高確率状態へ移行する確変大当たりのことであり、「4R確変大当たり」とは、最大ラウンド数が4ラウンドの大当たりの後に高確率状態へ移行する確変大当たりのことである。また、「15R通常大当たり」は、最大ラウンド数が15ラウンドの大当たりの後に、低確率状態へ移行すると共に、所定の変動回数の間(例えば、100変動回数)は時短状態となる大当たりのことである。
また、「高確率状態」とは、大当たり終了後に付加価値としてその後の大当たり確率がアップした状態、いわゆる確率変動中(確変中)の時をいい、換言すれば、特別遊技状態へ移行し易い遊技の状態のことである。本実施形態における高確率状態(確変中)は、後述する第2図柄の当たり確率がアップして第2入賞口640および第3入賞口82へ球が入賞し易い遊技の状態を含む。「低確率状態」とは、確変中でない時をいい、大当たり確率が通常の状態、即ち、確変の時より大当たり確率が低い状態をいう。また、「低確率状態」のうちの時短状態(時短中)とは、大当たり確率が通常の状態であると共に、大当たり確率がそのままで第2図柄の当たり確率のみがアップして第2入賞口640および第3入賞口82へ球が入賞し易い遊技の状態のことをいう。一方、パチンコ機10が通常中とは、確変中でも時短中でもない遊技の状態(大当たり確率も第2図柄の当たり確率もアップしていない状態)である。
確変中や時短中は、第2図柄の当たり確率がアップするだけではなく、第2入賞口640および第3入賞口82に付随する第1電動役物640aおよび第2電動役物82aが開放される時間も変更され、通常中と比して長い時間が設定される。第1電動役物640aおよび第2電動役物82aが開放された状態(開放状態)にある場合は、その第1電動役物640aおよび第2電動役物82aが閉鎖された状態(閉鎖状態)にある場合と比して、第2入賞口640および第3入賞口82へ球が入賞しやすい状態となる。よって、確変中や時短中は、第2入賞口640および第3入賞口82へ球が入賞し易い状態となり、大当たり抽選が行われる回数を増やすことができる。
なお、確変中や時短中において、第2入賞口640および第3入賞口82に付随する第1電動役物640aおよび第2電動役物82aの開放時間を変更するのではなく、または、その開放時間を変更することに加えて、1回の当たりで第1電動役物640aおよび第2電動役物82aが開放する回数を通常中よりも増やす変更を行うものとしてもよい。また、確変中や時短中において、第2図柄の当たり確率は変更せず、第2入賞口640および第3入賞口82に付随する第1電動役物640aおよび第2電動役物82aが開放される時間および1回の当たりで第1電動役物640a及び第2電動役物82aが開放する回数の少なくとも一方を変更するものとしてもよい。また、確変中や時短中において、第2入賞口640および第3入賞口82に付随する第1電動役物640aおよび第2電動役物82aが開放される時間や、1回の当たりで第1電動役物640aおよび第2電動役物82を開放する回数はせず、第2図柄の当たり確率だけを、通常中と比してアップするよう変更するものであってもよい。
遊技領域には、球が入賞することにより5個から15個の球が賞球として払い出される複数の一般入賞口63が配設されている。また、遊技領域の中央部分には、可変表示装置ユニット80が配設されている。可変表示装置ユニット80には、第1入賞口64、第2入賞口640、第3入賞口82のいずれかの入賞(始動入賞)をトリガとして、第1図柄表示装置37A,37Bにおける変動表示と同期させながら、第3図柄の変動表示を行う液晶ディスプレイ(以下単に「表示装置」と略す)で構成された第3図柄表示装置81と、第1スルーゲート66および第2スルーゲート67の球の通過をトリガとして第2図柄を変動表示するLEDで構成される第2図柄表示装置(図示せず)とが設けられている。
また、可変表示装置ユニット80には、第3図柄表示装置81の外周を囲むようにして、センターフレーム86が配設されている。このセンターフレーム86の中央に開口される開口部から第3図柄表示装置81が視認可能とされる。また、後述する回転体昇降ユニット300,中央遊動ユニット400および左右回転ユニット500が動作されると、それらの相対変位部材450や従動部材560の少なくとも一部がセンターフレーム86の開口部内に張り出し、開口部を介して視認可能とされる。
第3図柄表示装置81は9インチサイズの大型の液晶ディスプレイで構成されるものであり、表示制御装置114(図4参照)によって表示内容が制御されることにより、例えば上、中および下の3つの図柄列が表示される。各図柄列は複数の図柄(第3図柄)によって構成され、これらの第3図柄が図柄列毎に横スクロールして第3図柄表示装置81の表示画面上にて第3図柄が可変表示されるようになっている。本実施形態の第3図柄表示装置81は、主制御装置110(図4参照)の制御に伴った遊技状態の表示が第1図柄表示装置37A,37Bで行われるのに対して、その第1図柄表示装置37A,37Bの表示に応じた装飾的な表示を行うものである。なお、表示装置に代えて、例えばリール等を用いて第3図柄表示装置81を構成するようにしても良い。
第2図柄表示装置は、球が第1スルーゲート66および第2スルーゲート67を通過する毎に表示図柄(第2図柄(図示せず))としての「○」の図柄と「×」の図柄とを所定時間交互に点灯させる変動表示を行うものである。パチンコ機10では、球が第1スルーゲート66および第2スルーゲート67を通過したことが検出されると、当たり抽選が行われる。その当たり抽選の結果、当たりであれば、第2図柄表示装置において、第2図柄の変動表示後に「○」の図柄が停止表示される。また、当たり抽選の結果、外れであれば、第2図柄表示装置において、第3図柄の変動表示後に「×」の図柄が停止表示される。
パチンコ機10は、第2図柄表示装置における変動表示が所定図柄(本実施形態においては「○」の図柄)で停止した場合に、第2入賞口640および第3入賞口82に付随された第1電動役物640aおよび第2電動役物82aが所定時間だけ作動状態となる(開放される)よう構成されている。
第2図柄の変動表示にかかる時間は、遊技状態が通常中の場合よりも、確変中または時短中の方が短くなるように設定される。これにより、確変中および時短中は、第2図柄の変動表示が短い時間で行われるので、当たり抽選を通常中よりも多く行うことができる。よって、当たり抽選において当たりとなる機会が増えるので、第2入賞口640および第3入賞口82の第1電動役物640aおよび第2電動役物82aが開放状態となる機会を遊技者に多く与えることができる。よって、確変中および時短中は、第2入賞口640および第3入賞口82へ球が入賞しやすい状態とすることができる。
なお、確変中または時短中において、当たり確率を高める、1回に当たりに対する第1電動役物640aおよび第2電動役物82aの開放時間や開放回数を増やすなど、その他の方法によっても、確変中または時短中に第2入賞口640および第3入賞口へ球が入賞しやすい状態としている場合は、第2図柄の変動表示にかかる時間を遊技状態にかかわらず一定としてもよい。一方、第2図柄の変動表示にかかる時間を、確変中または時短中において通常中よりも短く設定する場合は、当たり確率を遊技状態にかかわらず一定にしてもよいし、また、1回の当たりに対する第1電動役物640aおよび第2電動役物82aの開放時間や開放回数を遊技状態にかかわらず一定にしてもよい。
第1スルーゲート66は、可変表示装置ユニット80の左側の領域において遊技盤に組み付けられ、第2スルーゲート67は、可変表示装置ユニット80の右側の領域において遊技盤に組み付けられる。第1スルーゲート66および第2スルーゲート67は、遊技盤に発射された球のうち、遊技盤を流下する球の一部が通過可能に構成されている。第1スルーゲート66および第2スルーゲート67を球が通過すると、第2図柄の当たり抽選が行われる。当たり抽選の後、第2図柄表示装置にて変動表示を行い、当たり抽選の結果が当たりであれば、変動表示の停止図柄として「○」の図柄を表示し、当たり抽選の結果が外れであれば、変動表示の停止図柄として「×」の図柄を表示する。
球の第1スルーゲート66および第2スルーゲート67の通過回数は、合計で最大4回まで保留され、その保留球数が上述した第1図柄表示装置37A,37Bにより表示されると共に第2図柄保留ランプ(図示せず)においても点灯表示される。第2図柄保留ランプは、最大保留数分の4つ設けられ、第3図柄表示装置81の下方に左右対称に配設されている。
なお、第2図柄の変動表示は、本実施形態のように、第2図柄表示装置において複数のランプの点灯と非点灯を切り換えることにより行うものの他、第1図柄表示装置37A,37Bおよび第3図柄表示装置81の一部を使用して行うようにしても良い。同様に、第2図柄保留ランプの点灯を第3図柄表示装置81の一部で行うようにしても良い。また、第1スルーゲート66および第2スルーゲート67の球の通過に対する最大保留球数は4回に限定されるものでなく、3回以下、又は、5回以上の回数(例えば、8回)に設定しても良い。また、スルーゲートの組み付け数は2つに限定されるものではなく、3つ以上の複数であっても良い。また、スルーゲートの組み付け位置は可変表示装置ユニット80の左右両側に限定されるものではなく、例えば、可変表示装置ユニット80の下方でも良い。また、第1図柄表示装置37A,37Bにより保留球数が示されるので、第2図柄保留ランプにより点灯表示を行わないものとしてもよい。
可変表示装置ユニット80の下方には、球が入賞し得る第1入賞口64が配設されている。この第1入賞口64へ球が入賞すると遊技盤13の裏面側に設けられる第1入賞口スイッチ(図示せず)がオンとなり、その第1入賞口スイッチのオンに起因して主制御装置110(図4参照)で大当たりの抽選がなされ、その抽選結果に応じた表示が第1図柄表示装置37Aで示される。
一方、第1入賞口64の正面視下方には、球が入賞し得る第2入賞口640が配設されている。また、第1入賞口64の正面視右方には、第3入賞口82が配設されている。これら、第2入賞口640および第3入賞口82へ球が入賞すると遊技盤13の裏面側に設けられる第2入賞口スイッチ(図示せず)がオンとなり、その第2入賞口スイッチのオンに起因して主制御装置110(図4参照)で大当たりの抽選がなされ、その抽選結果に応じた表示が第1図柄表示装置37Bで示される。
また、第1入賞口64,第2入賞口640,第3入賞口82は、それぞれ、球が入賞すると5個の球が賞球として払い出される入賞口の1つにもなっている。なお、本実施形態においては、第1入賞口64へ球が入賞した場合に払い出される賞球数と第2入賞口640および第3入賞口82へ球が入賞した場合に払い出される賞球数とを同じに構成したが、第1入賞口64へ球が入賞した場合に払い出される賞球数と第2入賞口640および第3入賞口82へ球が入賞した場合に払い出される賞球数とを異なる数、例えば、第1入賞口64へ球が入賞した場合に払い出される賞球数を3個とし、第2入賞口640および第3入賞口82へ球が入賞した場合に払い出される賞球数を5個として構成してもよい。
第2入賞口640には第1電動役物640aが付随されている。この第1電動役物640aは開閉可能に構成されており、通常は第1電動役物640aが閉鎖状態(縮小状態)となって、球が第2入賞口640へ入賞しにくい状態となっている。一方、第1スルーゲート66への球の通過を契機として行われる第2図柄の変動表示の結果、「○」の図柄が第2図柄表示装置に表示された場合、第1電動役物640aが開放状態(拡大状態)となり、球が第2入賞口640へ入賞しやすい状態となる。
また、第3入賞口82には第2電動役物82aが付随されている。この第2電動役物82aは開閉可能に構成されており、通常は第2電動役物82aが閉鎖状態(縮小状態)となって、球が第3入賞口82へと入賞しにくい状態となっている。一方、第2スルーゲート67への球の通過を契機として行われる第2図柄の変動表示の結果、「○」の図柄が第2図柄表示装置に表示された場合、第2電動役物82aが開放状態(拡大状態)となり、球が第3入賞口82へ入賞しやすい状態となる。
上述した通り、確変中および時短中は、通常中と比して第2図柄の当たり確率が高く、また、第2図柄の変動表示にかかる時間も短いので、第2図柄の変動表示において「○」の図柄が表示され易くなって、第1電動役物640aおよび第2電動役物82aが開放状態(拡大状態)となる回数が増える。更に、確変中または時短中は、第1電動役物640aおよび第2電動役物82aが開放される時間も、通常中より長くなる。よって、確変中または時短中は、通常時と比して、第2入賞口640および第3入賞口82へ球が入賞しやすい状態を作ることができる。
ここで、第1入賞口64に球が入賞した場合と第2入賞口640および第3入賞口82へ球が入賞した場合とで、大当たりとなる確率は、低確率状態であっても高確率状態でも同一である。しかしながら、大当たりとなった場合に選定される大当たりの種別として15R確変大当たりとなる確率は、第2入賞口640および第3入賞口82へ球が入賞した場合のほうが第1入賞口64へ球が入賞した場合よりも高く設定されている。一方、第1入賞口64は、第2入賞口640および第3入賞口82にあるような第1電動役物640aおよび第2電動役物82aは有しておらず、球が常時入賞可能な状態となっている。
よって、通常中においては、第2入賞口640および第3入賞口82に付随する電動役物が閉鎖状態にある場合が多く、第2入賞口640および第3入賞口82に入賞しづらいので、電動役物のない第1入賞口64へ向けて、可変表示装置ユニット80の左方を球が通過するように球を発射し(所謂「左打ち」)、第1入賞口64への入賞によって大当たり抽選の機会を多く得て、大当たりとなることを狙った方が、遊技者にとって有利となる。
一方、確変中や時短中は、第2スルーゲート67に球を通過させることで、第3入賞口82に付随する第2電動役物82aが開放状態となりやすく、第3入賞口82に入賞しやすい状態であるので、第3入賞口82へ向けて、可変表示装置80の右方を球が通過するように球を発射し(所謂「右打ち」)、第2スルーゲート67を通過させて第2電動役物82aを開放状態にすると共に、第3入賞口82への入賞によって15R確変大当たりとなることを狙った方が、遊技者にとって有利となる。
このように、本実施形態のパチンコ機10は、パチンコ機10の遊技状態(確変中であるか、時短中であるか、通常中であるか)に応じて、遊技者に対し、球の発射の仕方を「左打ち」と「右打ち」とに変えさせることができる。よって、遊技者に対して、球の打ち方に変化をもたらすことができるので、遊技を楽しませることができる。
なお、上記した形態に限らず、第1スルーゲート66および第2スルーゲート67のどちらかは、球が通過した場合、第2図柄とは別の図柄の当たり抽選をしてもよく、その別の図柄の抽選によって、第3入賞口82に付随する第2電動役物82aまたは、第2入賞口640に付随する第1電動役物640aが開放状態に変位するものとしてもよい。この場合、第1スルーゲート66と第2スルーゲート67に球が通過することで抽選する図柄は異なるため、第1スルーゲート66および第2スルーゲート67を球が通過して開放する電動役物はどちらか一方ずつに選択されることになる。
これにより、例えば、第2図柄に当たりが選択されると第2電動役物82aが開放するとした場合、球を右打ちして第2スルーゲート67を通過させると、第2図柄が抽選され、第2図柄の抽選に当たりが選択されると第2電動役物82aが開放し、球を左打ちして第1スルーゲート66を通過させると、第2図柄とは別の図柄が抽選され、第2図柄とは別の図柄に当たりが選択されると第1電動役物640aが開放する遊技状態とできる。
よって、確変中に第2図柄の抽選が当たり易い遊技状態とし、時短中には第2図柄とは別の図柄が当たりやすい遊技状態とすると、確変中は、右打ちして第2スルーゲート67を通過させ第2電動役物82aを開放して球を入賞させ易い遊技状態と、時短中は、左打ちして第1スルーゲート66を通過させ第1電動役物を開放して球を入賞し易い遊技状態にできる。そのため、通常中と時短中と確変中の遊技状態をそれぞれ違った遊技状態にできるので、遊技者にそれぞれの遊技状態を楽しませることができる。
また、他には、第2図柄に当たりが選択されると第2電動役物82aが開放するとした場合、球を右打ちして第2スルーゲート67を通過させると、第2図柄とは別の図柄が抽選され、第2図柄とは別の図柄の抽選に当たりが選択されると第1電動役物640aが開放し、球を左打ちして第1スルーゲート66を通過させると、第2図柄が抽選され、第2図柄に当たりが選択されると第2電動役物82aが開放する遊技状態にもできる。
この場合は、確変中および時短中にかかわらず、右打ちして球が第2スルーゲート67を通過すると第1電動役物を開放し、球を第2入賞口640に入賞し易い遊技状態と、左打ちして球が第1スルーゲート66を通過すると第2電動役物82aを開放し球を第3入賞口82に入賞し易い遊技状態とできる。よって、遊技者は、右打ちから左打ちまたは、左打ちから右打ちといった打ち方の変更をする必要がある。そのため、遊技者に対して、随時打ち方に変化をもたらすことができるので、遊技を楽しませることができる。
第1入賞口64の右側には可変入賞装置65が配設されており、その略中央部分に横長矩形状の特定入賞口(大開放口)65aが設けられている。パチンコ機10においては、第1入賞口64,第2入賞口64,第3入賞口82,のいずれかの入賞に起因して行われた大当たり抽選が大当たりとなると、所定時間(変動時間)が経過した後に、大当たりの停止図柄となるよう第1図柄表示装置37A又は第1図柄表示装置37Bを点灯させると共に、その大当たりに対応した停止図柄を第3図柄表示装置81に表示させて、大当たりの発生が示される。その後、球が入賞し易い特別遊技状態(大当たり)に遊技状態が遷移する。この特別遊技状態として、通常時には閉鎖されている特定入賞口65aが、所定時間(例えば、30秒経過するまで、或いは、球が10個入賞するまで)開放される。
この特定入賞口65aは、所定時間が経過すると閉鎖され、その閉鎖後、再度、その特定入賞口65aが所定時間開放される。この特定入賞口65aの開閉動作は、最高で例えば15回(15ラウンド)繰り返し可能にされている。この開閉動作が行われている状態が、遊技者にとって有利な特別遊技状態の一形態であり、遊技者には、遊技上の価値(遊技価値)の付与として通常時より多量の賞球の払い出しが行われる。
可変入賞装置65は、具体的には、特定入賞口65aを覆う横長矩形状の開閉板と、その開閉板の下辺を軸として前方側に開閉駆動するための大開放口ソレノイド(図示せず)とを備えている。特定入賞口65aは、通常時は、球が入賞できないか又は入賞し難い閉状態になっている。大当たりの際には大開放口ソレノイドを駆動して開閉板を前面下側に傾倒し、球が特定入賞口65aに入賞しやすい開状態を一時的に形成し、その開状態と通常時の閉状態との状態を交互に繰り返すように作動する。
なお、上記した形態に特別遊技状態は限定されるものではない。特定入賞口65aとは別に開閉される大開放口を遊技領域に設け、第1図柄表示装置37A,37Bにおいて大当たりに対応したLEDが点灯した場合に、特定入賞口65aが所定時間開放され、その特定入賞口65aの開放中に、球が特定入賞口65a内へ入賞することを契機として特定入賞口65aとは別に設けられた大開放口が所定時間、所定回数開放される遊技状態を特別遊技状態として形成するようにしても良い。また、特定入賞口65aは1つに限るものではなく、1つ若しくは2以上の複数(例えば3つ)配置しても良く、また配置位置も第1入賞口64の上方右側に限らず、例えば、可変表示装置ユニット80の左方でも良い。
遊技盤13の下側における右隅部には、証紙や識別ラベル等を貼着するための貼着スペースK1が設けられ、貼着スペースK1に貼られた証紙等は、前面枠14の小窓35(図1参照)を通じて視認することができる。
遊技盤13には、第1アウト口71が設けられている。遊技領域を流下する球であって、いずれの入賞口63,64,65a,640,82,にも入賞しなかった球は、第1アウト口71を通って図示しない球排出路へと案内される。第1アウト口71は、第1入賞口64の下方に配設される。
遊技盤13には、球の落下方向を適宜分散、調整等するために多数の釘が植設されているとともに、風車等の各種部材(役物)とが配設されている。
図3に示すように、パチンコ機10の背面側には、制御基板ユニット90,91と、裏パックユニット94とが主に備えられている。制御基板ユニット90は、主基板(主制御装置110)と音声ランプ制御基板(音声ランプ制御装置113)と表示制御基板(表示制御装置114)とが搭載されてユニット化されている。制御基板ユニット91は、払出制御基板(払出制御装置111)と発射制御基板(発射制御装置112)と電源基板(電源装置115)とカードユニット接続基板116とが搭載されてユニット化されている。
裏パックユニット94は、保護カバー部を形成する裏パック92と払出ユニット93とがユニット化されている。また、各制御基板には、各制御を司る1チップマイコンとしてのMPU、各種機器との連絡をとるポート、各種抽選の際に用いられる乱数発生器、時間計数や同期を図る場合などに使用されるクロックパルス発生回路等が、必要に応じて搭載されている。
なお、主制御装置110、音声ランプ制御装置113および表示制御装置114、払出制御装置111および発射制御装置112、電源装置115、カードユニット接続基板116は、それぞれ基板ボックス100〜104に収納されている。基板ボックス100〜104は、ボックスベースと該ボックスベースの開口部を覆うボックスカバーとを備えており、そのボックスベースとボックスカバーとが互いに連結されて、各制御装置や各基板が収納される。
また、基板ボックス100(主制御装置110)および基板ボックス102(払出制御装置111および発射制御装置112)は、ボックスベースとボックスカバーとを封印ユニット(図示せず)によって開封不能に連結(かしめ構造による連結)している。また、ボックスベースとボックスカバーとの連結部には、ボックスベースとボックスカバーとに亘って封印シール(図示せず)が貼着されている。この封印シールは、脆性な素材で構成されており、基板ボックス100,102を開封するために封印シールを剥がそうとしたり、基板ボックス100,102を無理に開封しようとすると、ボックスベース側とボックスカバー側とに切断される。よって、封印ユニット又は封印シールを確認することで、基板ボックス100,102が開封されたかどうかを知ることができる。
払出ユニット93は、裏パックユニット94の最上部に位置して上方に開口したタンク130と、タンク130の下方に連結され下流側に向けて緩やかに傾斜するタンクレール131と、タンクレール131の下流側に縦向きに連結されるケースレール132と、ケースレール132の最下流部に設けられ、払出モータ216(図4参照)の所定の電気的構成により球の払出を行う払出装置133とを備えている。タンク130には、遊技ホールの島設備から供給される球が逐次補給され、払出装置133により必要個数の球の払い出しが適宜行われる。タンクレール131には、当該タンクレール131に振動を付加するためのバイブレータ134が取り付けられている。
また、払出制御装置111には状態復帰スイッチ120が設けられ、発射制御装置112には可変抵抗器の操作つまみ121が設けられ、電源装置115にはRAM消去スイッチ122が設けられている。状態復帰スイッチ120は、例えば、払出モータ216(図4参照)部の球詰まり等、払出エラーの発生時に球詰まりを解消(正常状態への復帰)するために操作される。操作つまみ121は、発射ソレノイドの発射力を調整するために操作される。RAM消去スイッチ122は、パチンコ機10を初期状態に戻したい場合に電源投入時に操作される。
次に、図4を参照して、本パチンコ機10の電気的構成について説明する。図4は、パチンコ機10の電気的構成を示すブロック図である。
主制御装置110には、演算装置である1チップマイコンとしてのMPU201が搭載されている。MPU201には、該MPU201により実行される各種の制御プログラムや固定値データを記憶したROM202と、そのROM202内に記憶される制御プログラムの実行に際して各種のデータ等を一時的に記憶するためのメモリであるRAM203と、そのほか、割込回路やタイマ回路、データ送受信回路などの各種回路が内蔵されている。主制御装置110では、MPU201によって、大当たり抽選や第1図柄表示装置37A,37Bおよび第3図柄表示装置81における表示の設定、第2図柄表示装置における表示結果の抽選といったパチンコ機10の主要な処理を実行する。
なお、払出制御装置111や音声ランプ制御装置113などのサブ制御装置に対して動作を指示するために、主制御装置110から該サブ制御装置へ各種のコマンドがデータ送受信回路によって送信されるが、かかるコマンドは、主制御装置110からサブ制御装置へ一方向にのみ送信される。
RAM203は、各種エリア、カウンタ、フラグのほか、MPU201の内部レジスタの内容やMPU201により実行される制御プログラムの戻り先番地などが記憶されるスタックエリアと、各種のフラグおよびカウンタ、I/O等の値が記憶される作業エリア(作業領域)とを有している。なお、RAM203は、パチンコ機10の電源の遮断後においても電源装置115からバックアップ電圧が供給されてデータを保持(バックアップ)できる構成となっており、RAM203に記憶されるデータは、すべてバックアップされる。
停電などの発生により電源が遮断されると、その電源遮断時(停電発生時を含む。以下同様)のスタックポインタや、各レジスタの値がRAM203に記憶される。一方、電源投入時(停電解消による電源投入を含む。以下同様)には、RAM203に記憶される情報に基づいて、パチンコ機10の状態が電源遮断前の状態に復帰される。RAM203への書き込みはメイン処理(図示せず)によって電源遮断時に実行され、RAM203に書き込まれた各値の復帰は電源投入時の立ち上げ処理(図示せず)において実行される。なお、MPU201のNMI端子(ノンマスカブル割込端子)には、停電等の発生による電源遮断時に、停電監視回路252からの停電信号SG1が入力されるように構成されており、その停電信号SG1がMPU201へ入力されると、停電時処理としてのNMI割込処理(図示せず)が即座に実行される。
主制御装置110のMPU201には、アドレスバスおよびデータバスで構成されるバスライン204を介して入出力ポート205が接続されている。入出力ポート205には、払出制御装置111、音声ランプ制御装置113、第1図柄表示装置37A,37B、第2図柄表示装置、第2図柄保留ランプ、特定入賞口65aの開閉板の下辺を軸として前方側に開閉駆動するための大開放口ソレノイドや電動役物を駆動するためのソレノイドなどからなるソレノイド209が接続され、MPU201は、入出力ポート205を介してこれらに対し各種コマンドや制御信号を送信する。
また、入出力ポート205には、図示しないスイッチ群およびスライド位置検出センサSや回転位置検出センサRを含むセンサ群などからなる各種スイッチ208、電源装置115に設けられた後述のRAM消去スイッチ回路253が接続され、MPU201は各種スイッチ208から出力される信号や、RAM消去スイッチ回路253より出力されるRAM消去信号SG2に基づいて各種処理を実行する。
払出制御装置111は、払出モータ216を駆動させて賞球や貸出球の払出制御を行うものである。演算装置であるMPU211は、そのMPU211により実行される制御プログラムや固定値データ等を記憶したROM212と、ワークメモリ等として使用されるRAM213とを有している。
払出制御装置111のRAM213は、主制御装置110のRAM203と同様に、MPU211の内部レジスタの内容やMPU211により実行される制御プログラムの戻り先番地などが記憶されるスタックエリアと、各種のフラグおよびカウンタ、I/O等の値が記憶される作業エリア(作業領域)とを有している。RAM213は、パチンコ機10の電源の遮断後においても電源装置115からバックアップ電圧が供給されてデータを保持(バックアップ)できる構成となっており、RAM213に記憶されるデータは、すべてバックアップされる。なお、主制御装置110のMPU201と同様、MPU211のNMI端子にも、停電等の発生による電源遮断時に停電監視回路252から停電信号SG1が入力されるように構成されており、その停電信号SG1がMPU211へ入力されると、停電時処理としてのNMI割込処理(図示せず)が即座に実行される。
払出制御装置111のMPU211には、アドレスバスおよびデータバスで構成されるバスライン214を介して入出力ポート215が接続されている。入出力ポート215には、主制御装置110や払出モータ216、発射制御装置112などがそれぞれ接続されている。また、図示はしないが、払出制御装置111には、払い出された賞球を検出するための賞球検出スイッチが接続されている。なお、該賞球検出スイッチは、払出制御装置111に接続されるが、主制御装置110には接続されていない。
発射制御装置112は、主制御装置110により球の発射の指示がなされた場合に、操作ハンドル51の回動操作量に応じた球の打ち出し強さとなるよう球発射ユニット112aを制御するものである。球発射ユニット112aは、図示しない発射ソレノイドおよび電磁石を備えており、その発射ソレノイドおよび電磁石は、所定条件が整っている場合に駆動が許可される。具体的には、遊技者が操作ハンドル51に触れていることをタッチセンサ51aにより検出し、球の発射を停止させるための発射停止スイッチ51bがオフ(操作されていないこと)を条件に、操作ハンドル51の回動操作量(回動位置)に対応して発射ソレノイドが励磁され、操作ハンドル51の操作量に応じた強さで球が発射される。
音声ランプ制御装置113は、音声出力装置(図示しないスピーカなど)226における音声の出力、ランプ表示装置(電飾部29〜33、表示ランプ34など)227における点灯および消灯の出力、変動演出(変動表示)や予告演出といった表示制御装置114で行われる第3図柄表示装置81の表示態様の設定などを制御するものである。演算装置であるMPU221は、そのMPU221により実行される制御プログラムや固定値データ等を記憶したROM222と、ワークメモリ等として使用されるRAM223とを有している。
音声ランプ制御装置113のMPU221には、アドレスバスおよびデータバスで構成されるバスライン224を介して入出力ポート225が接続されている。入出力ポート225には、主制御装置110、表示制御装置114、音声出力装置226、ランプ表示装置227、その他装置228、枠ボタン22などがそれぞれ接続されている。その他装置228には、駆動モータ420,530,630が含まれる。
音声ランプ制御装置113は、主制御装置110から受信した各種のコマンド(変動パターンコマンド、停止種別コマンド等)に基づいて、第3図柄表示装置81の表示態様を決定し、決定した表示態様をコマンド(表示用変動パターンコマンド、表示用停止種別コマンド等)によって表示制御装置114へ通知する。また、音声ランプ制御装置113は、枠ボタン22からの入力を監視し、遊技者によって枠ボタン22が操作された場合は、第3図柄表示装置81で表示されるステージを変更したり、スーパーリーチ時の演出内容を変更したりするように、表示制御装置114へ指示する。ステージが変更される場合は、変更後のステージに応じた背面画像を第3図柄表示装置81に表示させるべく、変更後のステージに関する情報を含めた背面画像変更コマンドを表示制御装置114へ送信する。ここで、背面画像とは、第3図柄表示装置81に表示させる主要な画像である第3図柄の背面側に表示される画像のことである。表示制御装置114は、この音声ランプ制御装置113から送信されるコマンドに従って、第3図柄表示装置81に各種の画像を表示する。
また、音声ランプ制御装置113は、表示制御装置114から第3図柄表示装置81の表示内容を表すコマンド(表示コマンド)を受信する。音声ランプ制御装置113では、表示制御装置114から受信した表示コマンドに基づき、第3図柄表示装置81の表示内容に合わせて、その表示内容に対応する音声を音声出力装置226から出力し、また、その表示内容に対応させてランプ表示装置227の点灯および消灯を制御する。
表示制御装置114は、音声ランプ制御装置113および第3図柄表示装置81が接続され、音声ランプ制御装置113より受信したコマンドに基づいて、第3図柄表示装置81における第3図柄の変動演出などの表示を制御するものである。また、表示制御装置114は、第3図柄表示装置81の表示内容を通知する表示コマンドを適宜音声ランプ制御装置113へ送信する。音声ランプ制御装置113は、この表示コマンドによって示される表示内容にあわせて音声出力装置226から音声を出力することで、第3図柄表示装置81の表示と音声出力装置226からの音声出力とをあわせることができる。
電源装置115は、パチンコ機10の各部に電源を供給するための電源部251と、停電等による電源遮断を監視する停電監視回路252と、RAM消去スイッチ122(図3参照)が設けられたRAM消去スイッチ回路253とを有している。電源部251は、図示しない電源経路を通じて、各制御装置110〜114等に対して各々に必要な動作電圧を供給する装置である。その概要としては、電源部251は、外部より供給される交流24ボルトの電圧を取り込み、各種スイッチ208などの各種スイッチや、ソレノイド209などのソレノイド、モータ等を駆動するための12ボルトの電圧、ロジック用の5ボルトの電圧、RAMバックアップ用のバックアップ電圧などを生成し、これら12ボルトの電圧、5ボルトの電圧およびバックアップ電圧を各制御装置110〜114等に対して必要な電圧を供給する。
停電監視回路252は、停電等の発生による電源遮断時に、主制御装置110のMPU201および払出制御装置111のMPU211の各NMI端子へ停電信号SG1を出力するための回路である。停電監視回路252は、電源部251から出力される最大電圧である直流安定24ボルトの電圧を監視し、この電圧が22ボルト未満になった場合に停電(電源断、電源遮断)の発生と判断して、停電信号SG1を主制御装置110および払出制御装置111へ出力する。停電信号SG1の出力によって、主制御装置110および払出制御装置111は、停電の発生を認識し、NMI割込処理を実行する。なお、電源部251は、直流安定24ボルトの電圧が22ボルト未満になった後においても、NMI割込処理の実行に充分な時間の間、制御系の駆動電圧である5ボルトの電圧の出力を正常値に維持するように構成されている。よって、主制御装置110および払出制御装置111は、NMI割込処理(図示せず)を正常に実行し完了することができる。
RAM消去スイッチ回路253は、RAM消去スイッチ122(図3参照)が押下された場合に、主制御装置110へ、バックアップデータをクリアさせるためのRAM消去信号SG2を出力するための回路である。主制御装置110は、パチンコ機10の電源投入時に、RAM消去信号SG2を入力した場合に、バックアップデータをクリアすると共に、払出制御装置111においてバックアップデータをクリアさせるための払出初期化コマンドを払出制御装置111に対して送信する。
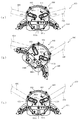
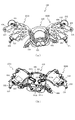
次いで、図5から図8を参照して、動作ユニット200の概略構成について説明する。図5は、動作ユニット200の正面斜視図であり、図6は、動作ユニット200の分解正面斜視図である。また、図7及び図8は、動作ユニット200の正面図である。
なお、図7では、回転体昇降ユニット300が下降位置に、中央遊動ユニット400が上昇位置に、左右回転ユニット500が退避位置に、それぞれ配置された状態が図示され、図8では、回転体昇降ユニット300が上昇位置に、中央遊動ユニット400が下降位置に、左右回転ユニット500が張出位置に、それぞれ配置された状態が図示される。
図5から図8に示すように、動作ユニット200は、箱状に形成される背面ケース210を備え、その背面ケース210の内部空間には、その上方および下方に回転体昇降ユニット300および中央遊動ユニット400がそれぞれ配設されると共に、中央遊動ユニット400を挟んで左右に一対の左右回転ユニット500及び左右センサ装置600が配設される。
背面ケース210は、底壁部211及びその底壁部211の外縁から立設される外壁部212を備え、これら各壁部211,212により一面側(図6紙面左手前側)が開放された箱状に形成される。背面ケース210の底壁部211には、その中央に矩形状の開口211aが開口形成され、背面ケース210が正面視矩形の枠状に形成される。なお、開口211aは、第3図柄表示装置81(図2参照)の外形に対応した(即ち、第3図柄表示装置81を配設可能な)大きさに形成される。
回転体昇降ユニット300は、複数(本実施形態では3個)が幅方向に並設される箱状の収容体330と、それら各収容体330にそれぞれ収容される複数(本実施形態では2個)の回転体(第1回転体340a及び第2回転体340b)とを主に備える。
複数の収容体330は、それぞれ独立して上下方向(図7及び図8の上下方向)に昇降可能に形成される。この場合、下降位置では(図7参照)、第1回転体340a及び第2回転体340bが遊技盤13の背面側に配置され遊技者から視認不能とされる。一方、上昇位置では(図8参照)、第1回転体340a及び第2回転体340bが遊技盤13(センターフレーム86)の開口部まで上昇され、かかる開口部を介して遊技者が視認可能とされる。
第1回転体340a及び第2回転体340bは、収容体330に回転可能に軸支され、その回転により外周面に描かれた複数(本実施形態では3個)の図形を順に遊技者に視認させる。なお、第1回転体340a及び第2回転体340bは、断面三角形の柱状体として形成され、外周の3面にそれぞれ異なる図形が描かれる。
本実施形態では、第1回転体340a及び第2回転体340bの駆動源を1の駆動モータ350で共用して、部品コストを削減可能としつつも、これら第1回転体340a及び第2回転体340bの図形の組み合わせを変更可能として、合計9種類の組み合わせを遊技者に視認させることができる(図20参照)。なお、詳細については後述する。
中央遊動ユニット400は、ベース体410と、そのベース体410に基端側が回転可能に軸支される一対のアーム体430と、それら一対のアーム体430の基端側と反対側となる先端側がそれぞれ相対変位可能に連結される第1部材440とを備える。
一対のアーム体430は、それぞれ別々の駆動モータ450により駆動され、互いに独立して変位(回転)可能に形成される。これにより、第1部材440を、上下方向に沿った直線状の昇降だけでなく、直線運動と回転運動とを組み合わせた態様で遊動させることができると共にその遊動を取り入れつつ昇降させることができ、第1部材440の動きに変化を与えることができる(図31から図34参照)。なお、詳細については後述する。
左右回転ユニット500は、回転体昇降ユニット300の正面ベース315,317及び中央遊動ユニット400のベース体410の前面に配設されるベース体(背面ベース511及び正面ベース512)と、そのベース体410に基端側が回転可能に軸支される変位部材530とを備える。変位部材530は、遊技盤13の背面側に退避して遊技者から視認不能とされる退避位置(図7参照)と、遊技盤13(センターフレーム86)の開口部内に張り出す張出位置(図8参照)との間で回転される。この場合、変位部材530は、張出位置に配置されることで、第1部材440に当接してその動きを規制可能に形成される(図41参照)。なお、詳細については後述する。
左右センサ装置600は、背面ケース210の開口211aを挟んで左右に配設される第1センサ610及び第2センサ620を備える。これら第1センサ610及び第2センサ620は、光を照射する発光部およびその発光部から照射され対象物F(図46参照)から反射された光を受光する受光部を備える光センサとして形成され、ガラスユニット16の板ガラス16aの前方における遊技者の手指の有無を検出可能に形成される。
第1センサ610は、回転体昇降ユニット300の中央ユニット300Cにおける正面ベース312の上端側に配設され(図9参照)、第2センサ620は、背面ケース210の底壁部211に配設される。この場合、第1センサ610及び第2センサ620は、互いに発光部および受光部を内側へ向けた傾斜姿勢で配設される。よって、遊技盤13(センターフレーム86)の開口部を挟んでそれぞれ開口部の内縁よりも幅方向の奥まった位置(幅方向外側となる位置)に配設されることができ、遊技者から視認され難くできる。
次いで、図9から図46を参照して、回転体昇降ユニット300、中央遊動ユニット400、左右回転ユニット500及び左右センサ装置600の詳細構成を説明する。まず、図9から図22を参照して、回転体昇降ユニット300の詳細構成について説明する。
図9は、回転体昇降ユニット300の正面図である。また、図10は、回転体昇降ユニット300の分解正面斜視図であり、図11は、回転体昇降ユニット300の分解背面斜視図である。
図9から図11に示すように、回転体昇降ユニット300は、中央の収容体330を昇降させるための中央ユニット300Cと、左右の収容体330をそれぞれ昇降させるための左ユニット300L及び右ユニット300Rとの3ユニットから形成される。左ユニット300Lは、中央ユニット300Cの前面側に重ね合わされ、右ユニット300Rは、中央ユニット300Cの右側端部に連結され、これにより、3個の収容体330が幅方向に並設される。
ここで、図12から図19を参照して、中央ユニット300C、左ユニット300L及び右ユニット300Rの詳細構成について説明する。まず、中央ユニット300Cについて、図12及び図13を参照して説明する。図12は、中央ユニット300Cの分解正面斜視図であり、図13は、中央ユニット300Cの分解背面斜視図である。
図12及び図13に示すように、中央ユニット300Cは、正面視L字状の背面ベース311と、その背面ベース311の正面側に重ね合わされる正面ベース312と、その正面ベース312の正面側に配設される駆動モータ320と、その駆動モータ320の駆動力により背面ベース311及び正面ベース312に対して昇降される収容体330と、その収容体330に収容される第1回転体340a及び第2回転体340bと、背面ベース311及び正面ベース312の対向面間に収容され駆動モータ320の駆動力を収容体330に伝達する伝達機構と、を主に備える。
中央ユニット300Cにおける伝達機構は、駆動モータ320の駆動軸に固着される駆動ギヤ321と、その駆動ギヤ321に歯合される伝達ギヤ322と、その伝達ギヤ322に歯合されるピニオンギヤ323と、そのピニオンギヤ323に歯合されると共に平板状の部材の側面に歯切りがされたラックとして形成されるラックギヤ324と、そのラックギヤ324が一側に配設されると共に他側に収容体330が配設される連結部材325とを備える。
背面ベース311の正面には、一対の軸が突設され、これら各軸に伝達ギヤ322及びピニオンギヤ323が回転可能に軸支される。また、背面ベース311の正面には、スライドガイド351,352が案内方向を上下方向(図12上下方向)とする姿勢で平行に配設され、これらスライドガイド351,352によって連結部材325(ラックギヤ324)及び収容体330が上下方向に案内される。即ち、連結部材325及び収容体330の移動方向が上下方向に規制される。
よって、駆動モータ320の回転駆動力が、駆動ギヤ321及び伝達ギヤ322を介してピニオンギヤ323に伝達され、ピニオンギヤ323が回転されると、そのピニオンギヤ323の回転運動がラックギヤ324の直線運動に変換され、そのラックギヤ324の直線運動に伴って、連結部材325と共に収容体330が上下方向に変位(昇降)される(図7及び図8参照)。
この場合、連結部材325は、ラックギヤ324が配設される縦長形状の部分と、収容体330が配設される縦長形状の部分とを、それらの下端側どうしを横長形状の部分で連結することで、正面視コ字状に形成される。これにより、左の収容体330が下降位置に配置された状態で、中央の収容体330が上昇位置に配置された場合でも、連結部材325の横長形状の部分を正面ベース312の背面に位置させ、遊技者から視認されることを回避できる。
なお、スライドガイド351は、背面ベース311の正面に形成される案内溝と、その案内溝に沿って摺動可能に形成されると共に連結部材325の背面に固着される摺動体とからなる直線案内機構として形成される。後述する左ユニット300L及び右ユニット300Rにおいても同様である。また、スライドガイド352は、背面ベース311に固着される第1レールと、連結部材325又は収容体330に固着される第2レールと、それら第1レール及び第2レールの間に介在され両者の長手方向への相対変位を許容するための中間レールとからなる伸縮式の直線案内機構として形成される。
ここで、中央の収容体330の側方(図12左側)には、左の収容体330が並設されることから(図9参照)、その分、連結部材325の横幅(図12左右方向)寸法が長くなる。更に、上述した通り、遊技者からの視認を回避するために、横長形状の部分が介在されるため、連結部材325が正面視コ字状に形成され、その剛性が低下される。そのため、中央の収容体330の姿勢が不安定となりやすい(左右方向への揺れが発生しやすい)。
これに対し、本実施形態では、中央の収容体330の背面側には、伸縮式の直線案内機構(スライドガイド352)を配設するので、中央の収容体330が上昇位置に配置された状態でも、伸長したスライドガイド352により左右方向への揺れを規制して、中央の収容体330の姿勢を安定させることができる。一方で、中央の収容体330が下降位置に配置された状態では(図9参照)、スライドガイド352を短縮させ、遊技者から視認されることを回避できる。
次いで、左ユニット300Lについて、図14及び図15を参照して説明する。図14は、左ユニット300Lの分解正面斜視図であり、図15は、左ユニット300Lの分解背面斜視図である。
図14及び図15に示すように、左ユニット300Lは、正面視縦長に形成され中央ユニット300Cの正面ベース312(図12参照)の正面に配設される背面ベース313と、その背面ベース313の正面側に重ね合わされる中間ベース314と、その中間ベース314の正面側に重ね合わされる正面ベース315と、中間ベース314の背面側に配設される駆動モータ320と、その駆動モータ320の駆動力により各ベース313〜315に対して昇降される収容体330と、その収容体330に収容される第1回転体340a及び第2回転体340bと、各ベース313〜315の各対向面間に収容され駆動モータ320の駆動力を収容体330に伝達する伝達機構と、を主に備える。
左ユニット300Lにおける伝達機構は、駆動モータ320の駆動軸に固着される駆動ギヤ321と、その駆動ギヤ321に歯合される伝達ギヤ322a,322bと、伝達ギヤ322bに同軸に固着されるピニオンギヤ323と、そのピニオンギヤ323に歯合されると共に平板状の部材の側面に歯切りがされたラックとして形成されるラックギヤ324と、そのラックギヤ324を収容体330に連結する連結部材326とを備える。
中間ベース314の正面には、軸が突設され、この軸に伝達ギヤ322aが回転可能に軸支される。また、中間ベース314には、軸支孔が穿設され、その軸支孔に伝達ギヤ322b及びピニオンギヤ323が同軸に固着された状態で回転可能に軸支される。
背面ベース313の正面には、スライドガイド351が案内方向を上下方向(図14上下方向)とする姿勢で配設され、このスライドガイド351によって連結部材326(ラックギヤ324)が上下方向に案内される。また、中央ユニット300の正面ベース312(図12参照)の正面には、ガイド板353が締結固定される。ガイド板353には、長穴状の開口である案内溝353aが上下方向に沿って延設され、この案内溝353aには、収容体330の下端側に位置する突出ピンがカラーCを介して内挿される。よって、収容体330は、ガイド板353の案内溝353aに沿って上下方向に案内される。即ち、連結部材326及び収容体330の移動方向が上下方向に規制される。
よって、駆動モータ320の回転駆動力が、駆動ギヤ321及び伝達ギヤ322a,322bを介してピニオンギヤ323に伝達され、ピニオンギヤ323が回転されると、そのピニオンギヤ323の回転運動がラックギヤ324の直線運動に変換され、そのラックギヤ324の直線運動に伴って、連結部材326と共に収容体330が上下方向に変位(昇降)される(図7及び図8参照)。
次いで、右ユニット300Rについて、図16を参照して、説明する。図16は、右ユニット300Rの分解正面斜視図である。
図16に示すように、右ユニット300Lは、正面略L字状に形成され中央ユニット300Cの背面ベース311(図12参照)の右側端部に連結される配設される背面ベース316と、その背面ベース313の正面側に重ね合わされる正面ベース317と、正面ベース317の正面側に配設される駆動モータ320と、その駆動モータ320の駆動力により背面ベース316及び正面ベース317に対して昇降される収容体330と、その収容体330に収容される第1回転体340a及び第2回転体340bと、背面ベース316及び正面ベース317の対向面間に収容され駆動モータ320の駆動力を収容体330に伝達する伝達機構と、を主に備える。
右ユニット300Rにおける伝達機構は、駆動モータ320の駆動軸に固着される駆動ギヤ321と、その駆動ギヤ321に歯合されるピニオンギヤ323と、そのピニオンギヤ323に歯合されると共に平板状の部材の側面に歯切りがされたラックとして形成されるラックギヤ324と、そのラックギヤ324を収容体330に連結する連結部材327とを備える。
背面ベース316の正面には、軸が突設され、この軸にピニオンギヤ324が回転可能に軸支される。背面ベース316の正面には、スライドガイド351が案内方向を上下方向(図16上下方向)とする姿勢で配設され、このスライドガイド351によって連結部材327(ラックギヤ324)が上下方向に案内される。また、正面ベース316には、長穴状の開口である案内溝316aが上下方向に沿って延設され、この案内溝316aには、収容体330の下端側に位置する突出ピンがカラー(図示せず)を介して内挿される。よって、収容体330は、背面ベース316の案内溝316aに沿って上下方向に案内される。即ち、連結部材327及び収容体330の移動方向が上下方向に規制される。
よって、駆動モータ320の回転駆動力が、駆動ギヤ321を介してピニオンギヤ323に伝達され、ピニオンギヤ323が回転されると、そのピニオンギヤ323のzがラックギヤ324の直線運動に変換され、そのラックギヤ324の直線運動に伴って、連結部材327と共に収容体330が上下方向に変位(昇降)される(図7及び図8参照)。
上述したように、中央ユニット300Cでは、連結部材325の横幅寸法が長くなり(図12参照)、中央の収容体330の姿勢が不安定となりやすい(左右方向への揺れが発生しやすい)。これに対し、左ユニット300L及び右ユニット300Rでは、左の収容体330及び右の収容体330の側面の近接する位置にラックギヤ323を設けるので、連結部材326,327の横幅(図14及び図16左右方向)寸法を短くして、その剛性を高めることができる。よって、左右の収容体330の姿勢を安定させる(左右方向や揺れ難くする)ことができる。
これに伴って、左右の収容体330の背面側には、伸縮式の直線案内機構(スライドガイド352)を配設する必要がなく、ガイド板353又は背面ベース316の案内溝353a,316aによる案内により十分に姿勢を安定化できる。その結果、部品コストの削減を図ることができる。
次いで、収容体330及びその収容体330に収容される第1回転体340a及び第2回転体340bについて、図17から図19を参照して説明する。
図17は、収容体330の分解正面斜視図である。また、図18(a)は、図17の矢印XVIIIa方向視における収容体330の側面図であり、図18(b)は、図18(a)の矢印XVIIIb方向視における収容体330の正面図である。なお、図18(a)及び図18(b)では、側壁体332、隔壁体334及び装飾体335が取り外された状態が図示される。
図17及び図18に示すように、収容体330は、基体331と、その基体331の左右に配設される左右の側壁体332,333と、左の側壁体332の内面側に配設される隔壁体334と、基体331の前面に配設される装飾体335とを備え、これら各部331〜335が締結固定により一体化されることで、箱状に形成される。
基体331は、収容体330の背面(図18(b)紙面奥側)、上面および下面(図18(b)上側および下側)を形成する部材であり、3枚の板状の部材を組み合わせて一体に形成される。収容体330の背面を形成する部分には、可視光を反射する鏡として形成される反射部RFが正面に配設される。
反射部RFは、正面視矩形状に形成され、第1回転体340a及び第2回転体340bを正面視した場合に、それら両回転体340a,340bよりも少なくとも上下方向に張り出す大きさを有して形成される(図18(b)参照)。
側壁体332,333は、収容体330の左右の側面を形成する矩形板状の部材であり、それぞれ2箇所に保持孔332a,333aが穿設される。保持孔332a,333aは、第1回転体340a及び第2回転体340bの後述する固定軸341が挿通される孔であり、かかる固定軸341を回転不能に保持する。なお、保持孔332a,333aは、その内周面の軸直断面形状が、円形からその円周上の2点を直線で接続して区画される一方を取り除いた形状とされる。
隔壁体334は、側壁体332と略同一の外形を有する矩形板状の部材であり、側壁体332との対向面間に伝達ギヤ352及び中間ギヤ354を回転可能に軸支する。また、隔壁体334には、第1ギヤ353及び第2ギヤ355を挿通させるための挿通孔334aが2箇所に穿設される。
装飾体335は、収容体330の正面を装飾する部材であり、中央に矩形状の開口335aが形成されることで正面視枠状に形成される。遊技者は、開口335を介して第1回転体340a及び第2回転体340bの回転の態様やそれら両回転体340a,340bの外周面に描かれた図形を視認することができる(図9参照)。
このように形成される収容体330には、隔壁体334に配設される駆動モータ350と、その駆動モータ320の駆動力により回転される第1回転体340a及び第2回転体340bと、駆動モータ320の駆動力を第1回転体340a及び第2回転体340bに伝達する伝達機構と、第1回転体340aの回転位置を検出する検出機構とが主に収納される。
収容体330における伝達機構は、駆動モータ350の駆動軸に固着される駆動ギヤ351と、その駆動ギヤ351に順に歯合される伝達ギヤ352、第1ギヤ353、中間ギヤ354及び第2ギヤ355からなる歯車列とを備える。伝達ギヤ352及び中間ギヤ354は、側壁体332及び隔壁体334の対向面間に回転可能に保持され、第1ギヤ353及び第2ギヤ355は、第1回転体340a及び第2回転体340bの軸方向端面にそれぞれ固着される。
ここで、図19を参照して、第1回転体340a及び第2回転体340bの詳細構成について説明する。図19は、第1回転体340aの分解正面斜視図である。
なお、第1回転体340aと第2回転体340bとは、外周面に描かれる図形が異なる点を除き、実質的に同一の構成であるので、以下においては、第1回転体340aを代表例として説明し、第2回転体340bの説明は省略する。
図19に示すように、第1回転体340aは、固定軸341と、その固定軸341の軸方向両端(軸部341b)に回転可能に軸支される一対の端面板342と、それら一対の端面板342の間に架設される3枚の表示板(第1表示板343A、第2表示板343B及び第3表示板343C)とを主に備える。
固定軸341は、胴部341aと、その胴部341aの軸方向両端に連設される軸部341bとを備える。固定軸341は、収容体330の側壁体332,333(図17参照)に回転不能に保持される部位であり、軸方向両端に位置する一対の軸部341aと、一対の軸部341aを接続する胴部341bとを備える。
軸部341bは、その軸直断面形状が、円形からその円周上の2点を直線で接続して区画される一方を取り除いた形状(円柱の外周面の一部を平面で面取りした形状)とされ、側壁体332,333の保持孔332a,333a(図17参照)に対して若干小さな相似形状とされる。よって、かかる軸部341bが側壁体332,333の保持孔332a,333aに挿通されることで、固定軸341を収容体330(側壁体332,333)に回転不能に保持することができる。
胴部341bには、複数(本実施形態では4個)のLED344が取着され、そのLED344から発光された光を第1表示板343A〜第3表示板343Cの内面に照射可能とされる。
この場合、胴部341bは、軸部341aが側壁体332,333の保持孔332a,333aに挿通されて回転不能に保持された状態では、LED344の照射方向を収容体330の前面(装飾体335の開口335a、図18(b)紙面手前側の面)へ向けた姿勢(回転位置)で配置される。よって、LED344から発光された光を、第1表示板343A〜第3表示板343Cのうちの収容体330の前面(後述する「視認位置」)に配置された表示板の内面に照射することができる。
なお、固定軸341(軸部341a、胴部341b)は、軸方向両端が開口した中空の円筒状に形成されるので、かかる内部空間を利用してLED344の配線を取り回すと共にその配線を軸方向端部の開口から収容体330の外部へ引き出すことができる。また、固定軸341は、上述したように、収容体330に対して回転不能とされるので、第1回転体340aが回転されても、LED344の配線に捩じりや引っ張りの外力が作用することを回避できる。
端面板342は、正面視三角形状に形成される部材であり、中央に軸直断面が円形の軸支孔342が穿設される。軸支孔342の内径寸法は、固定軸341の軸部341aの外径寸法よりも若干大きな寸法に設定される。よって、軸支孔342aに軸部341aが挿通されることで、固定軸341に対して端面板342が回転可能に軸支される。これにより、端面板342は、固定軸341を介して、収容体330の内部に回転可能に保持される。
ここで、固定軸341は、軸部341aよりも胴部341bが大径に形成されるので、収容体330の側壁体332,333と固定軸341の胴部341bとの間で端面板342の軸方向位置を規定できると共に、端面板342を介して固定軸341を一対の側壁体332,333の間で保持できる。
一対の端面板342の一方には、伝達機構における第1ギヤ353が、他方には検出機構における後述する基部ギヤ361が、それぞれ固着される。なお、第2回転体340bには、一対の端面板342の一方には、伝達機構における第2ギヤ355が固着されるが、他方への基部ギヤ361の装着は省略される(図17及び図18参照)。
第1表示板343A〜第3表示板343Cは、それぞれ正面視略矩形の板状の部材であり、長手方向両端の外縁を端面板342の外縁(3辺)にそれぞれ接続することで、一対の端面板342の間に架設され、かかる端面板342と共に三角柱状体を形成する。
これら第1表示板343A〜第3表示板343Cには、その外面にそれぞれ図形が描かれている。よって、三角柱状体が回転されると、各表示板343A〜343Cの外面にそれぞれ描かれた図形が装飾体335の開口335aを介して順に遊技者に視認可能とされる。
第1表示板343A〜第3表示板343Cの外面の少なくとも一部は、固定軸341の軸方向視において、外方へ凸となる円弧状に湾曲して形成される。これにより、後述するように、第1回転体340aと第2回転体340bとの間に回転位置の所定回転角度(例えば、12度)のずれが存在する状態であっても、各表示板343A〜343Cの外面に描かれた図形を視認する遊技者に対し、所定回転角度のずれの認識を困難とさせることができる。
なお、本実施形態では、固定軸341の軸方向視において、第1表示板343A〜第3表示板343Cの幅方向端部が外方へ凸となる円弧状に湾曲して形成される一方、幅方向中央部分が略平坦面状に形成される。これにより、図形の視認性の確保と、回転体340a,340b間のずれの認識を困難とさせることとの両立を図ることができる。また、湾曲して形成される円弧状部分の円弧の半径は、固定軸341の軸心から各表示板343A〜343Cの外面までの最大距離よりも大きくな値(例えば、2倍以上かつ4倍以下)に設定される。
ここで、以下においては、三角柱状体が回転される際の第1表示板343A〜第3表示板343Cの配設位置として、収容体330の前面(図18(b)紙面手前側の面)に外面を向けその外面に描かれる図形が装飾体335の開口335aを介して遊技者から視認可能となる位置を「視認位置」と称し、収容体330(基体331)の内面に外面を向けその外面に描かれる図形が装飾体335の開口335aを介して遊技者から視認不能となる位置を「遮蔽位置」と称す。
よって、例えば、第1表示板343Aが視認位置に配置されると、第2表示板343B及び第3表示板343Cが遮蔽位置に配置される(図18(a)及び図18(b)参照)。この状態から三角柱状体が120度だけ正方向または逆方向へ回転されると、第2表示板343B又は第3表示板343Cの一方が視認位置に配置され、第2表示板343B又は第3表示板343Cの他方と第1表示板343Aとが遮蔽位置に配置される。
この場合、本実施形態では、第1表示板343Aは、その全体が光を透過させない形態に形成される一方、第2表示板343B及び第3表示板343Cは、光が透過可能な透過部PNを一部に備えて形成される。また、第1表示板343Aの内面には、可視光を反射する鏡として形成される反射部RFが配設される。
上述したように、LED344は、第1表示板343A〜第3表示板343Cのうちの視認位置に配置された表示板の内面を照射可能な位置に配置される。よって、視認位置に第2表示板343B又は第3表示板343Cが配置された状態では、LED344から発光された光を、各表示板343B,343Cの透過部PNを透過させて遊技者に直接視認させることができる。
一方、視認位置に第1表示板343Aが配置された状態では(図18(a)及び図18(b)参照)、LED344から発光された光を、第1表示板343Aの内面の反射部RFで反射させ、第2表示板343B又は第3表示板343Cの透過部PNを透過させた後、収容体330の基体331における反射部RFで反射させ、この基体331の反射部RFからの反射光として遊技者に間接的に視認させることができる。
例えば、第1表示板343Aが視認位置に配置される回転位置で第1回転体340aを停止させ、LED344を発光させることで、収容体330の基体331における反射部RFで反射した反射光を視認した遊技者に、その遊技者から視認不能な位置(遮蔽位置)に配置された第2表示板343B又は第3表示板343Cの図形を連想させることができる。これにより、第2表示板343B又は第3表示板343Cの図形が視認可能となる位置に第1回転体340aが回転されることを遊技者に期待させる又は示唆することができる。
特に、本実施形態では、第1回転体340a及び第2回転体340bが断面三角形状に形成されるので、各回転体340a,340bが回転される際には、その回転に伴って、反射板RFと各回転体340a,340bの外面(各表示板343A〜343C)との間の間隔、各回転体340a,340bどうしの外面の間の間隔(図18(b)上下方向間隔)、或いは、各回転体340a,340bの見かけの直径(図18(b)上下方向寸法)を増減させることができると共に、反射板RFに対する各回転体340a,340bの外面(各表示板343Aから343C)の対向角度を変化させることができる。即ち、両回転体340a,340bの回転に伴い、LED344から発光され透過部PNから照射された光を、基体441の反射部RFからの反射光として視認する遊技者に対して、その反射光の態様(例えば、光が視認される領域の大きさ)を周期的に変化させることができる。
図17及び図18に戻って説明する。検出機構は、第1回転体340aの端面板342に固着される基部ギヤ361と、その基部ギヤ361に歯合される中間ギヤ362と、その中間ギヤ362に歯合されるギヤであって径方向外方に張り出す被検出板363aを備える末端ギヤ363と、その末端ギヤ363の被検出板363aを検出するセンサ装置364とを備える。
中間ギヤ362及び末端ギヤ363は、側壁体333に回転可能に保持され、センサ装置364は、被検出板363aの移動軌跡上に検出領域を配置した状態で、基体331に配設される。よって、センサ装置364は、被検出板363aの検出状体に基づいて、第1回転体340aの回転位置を検出することができる。即ち、センサ装置364の検出結果に基づいて、第1回転体340a及び第2回転体340bの回転位置を制御する(例えば、任意位置で停止させる)ことができる。
次いで、第1回転体340a及び第2回転体340bの回転動作について説明する。駆動モータ350が回転されると、その回転が伝達機構を介して第1回転体340a及び第2回転体340bに伝達され、これら両回転体340a,340bが回転される。
具体的には、駆動モータ350が回転されると、その回転が駆動ギヤ351及び伝達ギヤ352を介して第1ギヤ353に伝達され、第1ギヤ353が回転される。これにより、第1回転体340aが回転される。また、第1ギヤ353が回転されると、その回転が中間ギヤ354を介して第2ギヤ355に伝達され、第2ギヤ355が回転される。これにより、第2回転体340bが第1回転体340aと同方向に回転される。また、駆動モータ350の回転方向が反転されると、第1回転体340a及び第2回転体340bが上述した場合とは逆方向に回転される。
その結果、遊技者に視認される第1回転体340aの図形と第2回転体340bの図形との組み合わせが順に変更される。この場合、両回転体340a,340bの図形の組み合わせは、従来品では、3組に限定されていた。
即ち、第1回転体340aと第2回転体340bとが1の駆動モータにより同期して回転駆動されるため、形成可能な組み合わせは、例えば、第1回転体340aの第1表示板343Aと第2回転体340aの第1表示板343Aとを表示位置に配置する第1の組み合わせ、第1回転体340aの第2表示板343Bと第2回転体340aの第2表示板343Bとを表示位置に配置する第2の組み合わせ、第1回転体340aの第3表示板343Cと第2回転体340aの第3表示板343Cとを表示位置に配置する第3の組み合わせの3組のみであった。
一方で、第1回転体340aと第2回転体340bとをそれぞれ異なる駆動モータにより独立して回転駆動する構造を採用することで、最大9組の組み合わせを形成することができると共に、その組み合わせを任意に現出させることができる。しかしながら、この場合には、2個の駆動モータを必要とする分、部品コストの増加を招く。
これに対し、本実施形態では、駆動モータ350の数を1個のみに抑えつつ、第1回転体340a及び第2回転体340bの図形の組み合わせを9組形成することができると共に、その組み合わせを任意に現出させることができる。また、本実施形態では、第1回転体340a及び第2回転体340bの回転位置の完全一致を要求せず、回転位置の所定量のずれを許容することで、9組の組み合わせを速やかに現出させることができる。この両回転体340a,340bの図形の組み合わせについて、図20及び図21を参照して説明する。
図20は、第1回転体340a及び第2回転体340bの図形の組み合わせを示すテーブルである。また、図21及び図22は、第1回転体340a及び第2回転体340bが回転される際の遷移状態を示す第1回転体340a及び第2回転体340bの側面模式図であり、図21(a)から図21(e)は、図20にNo.1〜5として示す状態に、図22(a)から図22(e)は、図20にNo.6〜10として示す状態に、それぞれ対応する。
なお、図20では、第1回転体340a及び第2回転体340bの図形の組み合わせとして、視認位置に第1表示板343Aが配置された状態が符号「A」又は「A’」により、視認位置に第2表示板343Bが配置された状態が符号「B」又は「B’」により、視認位置に第3表示板343Cが配置された状態が符号「C」又は「C’」により、それぞれ表される。
例えば、図20のNo.10「A,C’」で表される状態は、第1回転体340aの第1表示板343Aと第2回転体340bの第3表示板343Cとがそれぞれ視認位置に配置され、第1回転体340aからは第1表示板343Aに描かれる図形が、第2回転体340bからは第3表示板343Cに描かれる図形が、それぞれ遊技者に視認される状態に対応する。
また、図21では、図面を簡素化して、理解を容易とするために、第1回転体340aの第1表示板343A〜第3表示板343Cを符号「A〜C」を用いて、第2回転体340aの第1表示板343A〜第3表示板343Cを符号「A’〜C’」を用いて、それぞれ図示する。
ここで、第1回転体340a及び第2回転体340bは、それぞれに固着される第1ギヤ353及び第2ギヤ355の歯数が異なる値に設定される。本実施形態では、第1ギヤ353の歯数が14に、第2ギヤ355の歯数が20とされる、第1回転体340aを120度回転させると、第2回転体340bが108度回転するように形成される。
図20のNo.1及び図21(a)に示すように、第1回転体340aの第1表示板343A及び第2回転体340bの第1表示板343Aをそれぞれ視認位置に配置した状態から(図20のNo.1「A’,A」、第1の組み合わせ)、第1回転体340aを120度回転させその第2表示板343Bを視認位置に配置させると、図20のNo.2及び図21(b)に示すように、第2回転体340bは第2表示板343Bを視認位置に配置させる。これにより、第2の組み合わせ(図20のNo.2「B’,B」)を形成することができる。
この場合、第1回転体340aの120度の回転に対し、第2回転体340bの回転は108度であるので、両者の回転位置に12度の差異(ずれ)が生じるが、各回転体340a,340bを軸直角方向から視認する遊技者が、その12度の回転角度の差異を認識することは困難であり、その結果、第1回転体340a及び第2回転体340bの各第2表示板343Bの外面に描かれた図形がそれぞれ視認位置に配置された(第2の組み合わせが形成された)と認識させることができる。
特に、本実施形態では、上述したように、第1表示板343A〜第3表示板343Cの外面が、固定軸341の軸方向視において、外方へ凸となる円弧状に湾曲して形成される(即ち、図形が描かれる面が各回転体340a,340bの回転方向に沿って湾曲される)ので、これら各表示板343A〜343Cの外面に描かれた図形を正面視する遊技者に対し、第1回転体340a及び第2回転体340bの回転位置の相違(ずれ)を認識させることを困難とさせることができる。
図20のNo.2及び図21(b)に示す状態から、第1回転体340aを120度回転させその第3表示板343Cを視認位置に配置させると、図20のNo.3及び図21(c)に示すように、第2回転体340bはその回転位置を第1回転体340aに対して位置ずれされた位置に配置する。即ち、この状態では、両者の間に24度の回転角度の差異が形成されるため、遊技者に図形のずれ(組み合わせの非成立、図20のNo.3「−,C」)を認識させることができる。
同様に、図20のNo.4及び図21(d)に示す状態から図20のNo.9及び図22(d)に示す状態までの区間の回転では、第1回転体340aは、その120度の回転毎に各表示板343A〜343Cを視認位置に配置させる一方で、第2回転体340bはその回転位置を第1回転体340aに対して位置ずれさせた位置に配置する。その結果、遊技者に図形のずれ(組み合わせの非成立、図20のNo.4「−,A」〜No.9「−,C」)を認識させることができる。
図20のNo.9及び図22(d)に示す状態から(図20のNo.9「−,C」)、第1回転体340aを120度回転させその第1表示板343Aを視認位置に配置させると、図20のNo.10及び図22(e)に示すように、第2回転体340bは第3表示板343Cを視認位置に配置させる。これにより、第3の組み合わせ(図20のNo.10「C’,A」)を形成することができる。
なお、本実施形態によれば、図形のずれ(組み合わせの非成立、図20のNo.3「−,C」〜No.9「−,C」)が形成される区間においても、第2回転体340bの回転を継続させ、遊技者から視認される図形を切り替え続けることができるため、第3の組み合わせにおいて、いずれの図形が組み合わされるのかを遊技者に予測困難とさせることができる。
以降は、上述した態様(図20のNo.1及び図21(a)に示す状態から図20のNo.9及び図22(e)に示す状態までの区間の回転)と実質的に同一の態様が、更に2回繰り返されることで、1サイクルが完了される(テーブルが始点から終点まで一巡される)。
この場合、図20のNo.11〜No.20に示す状態の区間では、図21及び図22における第1回転体340aの位相を120度異ならせた状態に置き換えて考えれば良く、第4の組み合わせ(図20のNo.11「A’,B」)、第5の組み合わせ(図20のNo.12「B’,C」)及び第6の組み合わせ(図20のNo.20「C’,B」)を形成することができる。
また、図20のNo.21〜No.30に示す状態の区間では、図21及び図22における第1回転体340aの位相を240度異ならせた状態に置き換えて考えれば良く、第7の組み合わせ(図20のNo.21「A’,C」)、第8の組み合わせ(図20のNo.22「B’,A」)及び第9の組み合わせ(図20のNo.30「C’,C」)を形成することができる。
以上のように、本実施形態によれば、駆動モータ350の回転を第1回転体340a及び第2回転体340bのそれぞれへ伝達する伝達機構が、複数の歯車(駆動ギヤ351〜第2ギヤ355の5枚の歯車)からなる歯車列として形成され、駆動モータ350の回転を、第1回転体340a及び第2回転体340bへそれぞれ異なる回転比で伝達可能に形成される。
これにより、第1回転体340aの回転周期と第2回転体340bの回転周期とを異ならせることができる。その結果、1個の駆動モータ350のみであっても、第1回転体340a及び第2回転体340bの図形の組み合わせを9組形成することができると共に、その組み合わせを任意に変更できる(所望の組み合わせを任意に現出させることができる)。
また、伝達機構が歯車列として形成されることで、構造を簡素化して、部品コストの削減と耐久性および信頼性の向上とを図ることができるだけでなく、各歯車が常に歯合されているので、駆動モータ350の回転方向を正逆切り替えることで、図20に示すテーブルの進行方向を切り替えることができる。
よって、例えば、図20のテーブルを正方向(図20下方向)へ進行し、図形のずれ(組み合わせの非成立)が形成される区間(例えば、図20のNo.3〜No.9)を経て、第3の組み合わせ(図20のNo.10「C’,A」)を現出させた後または現出させた直前で、駆動モータ350の回転方向を逆転させ、図20のテーブルを逆方向(図20上方向)へ戻るという一連の動作を繰り返すことができ、これにより、第3の組み合わせの現出を遊技者に期待させるという演出を行うことができる。
或いは、例えば、第1の組み合わせ(図20のNo.1「A’,A」)が形成された状態から、第9の組み合わせ(図20のNo.30「C’,C」)を現出させる必要がある場合に、図20のテーブルを正方向(図20下方向)へ進行して、第9の組み合わせを現出させることに加え、図20のテーブルを逆方向(図20上方向)へ進行して、第9の組み合わせを現出させることもできる。即ち、前者の場合には、第1回転体340aの120度の回転を30回繰り返すことが必要となるのに対し、後者の場合には、第1回転体340aの120度の回転を1回行えば良いので、所望の図形の組み合わせを速やかに現出させることができる。
ここで、第1回転体340aの120度の回転に対して、第2回転体340bを60度回転させる構成とした場合(即ち、第2回転体340bの回転を、第1回転体340aの回転に対し、「1/整数」倍に設定した場合)には、第1回転体340a及び第2回転体340bの回転位置に差異(ずれ)を発生させることなく、図形の組み合わせを複数形成することができる。しかしながら、この場合には、図形の組み合わせ可能な数が最大3組となる。
これに対し、本実施形態では、上述したように、第1、第4及び第7の組み合わせ(図20のNo.1「A’,A」、No.11「A’,B」及びNo.21「A’,C」)を除き、残りの6組の組み合わせ(第2、第3、第5、第6、第8及び第9の組み合わせ)において、第1回転体340a及び第2回転体340bの回転位置に所定回転角度の差異(ずれ)が発生することを許容する。これにより、図形の組み合わせ可能な数を9組とすることができる。
即ち、第1回転体340a及び第2回転体340bを1の駆動モータ350により回転させる構造において、図形の組み合わせ可能な数を9組とすることは、駆動モータ350の回転を第1回転体340a及び第2回転体340bのそれぞれへ伝達する伝達機構が歯車列として形成されるだけでは達成不可能であり、本実施形態のように、第1回転体340a及び第2回転体340bの回転位置に所定回転角度の差異(ずれ)が生じることを許容することで初めて可能となったものである。これにより、図形の組み合わせ可能数の増加による演出効果の向上を図りつつ、駆動モータ350の必要数を抑制して、製品コストの削減を図ることができる。
この場合、第1回転体340a及び第2回転体340bの回転位置に所定回転角度の差異(ずれ)が生じる図形の組み合わせ(第2、第3、第5、第6、第8及び第9の組み合わせ)では、第1回転体340a及び第2回転体340bを停止させる停止位置を補正するようにしても良い。
例えば、第2、第5及び第8の組み合わせ(図20のNo.2「B’,B」、No.12「B’,C」及びNo.22「B’,A」)では、図21(b)に示すように、第2回転体340bの位相が遅れるので、第1回転体340aを所定角度だけ位相を進めた回転位置で停止させる。即ち、基準面からの位置ずれが第2回転体340bのみに集中されているので、図21(a)に示す状態から第1回転体340aを120度回転させた回転位置で停止させるのではなく、例えば、126度回転させた回転位置で停止させる。これにより、基準面からの位置ずれを第1回転体340a及び第2回転体34bに分散させて、目立たなくすることができる。
同様に、例えば、第3、第6及び第9の組み合わせ(図20のNo.10「C’,A」、No.20「C’,B」及びNo.30「C’,C」)では、図22(e)に示すように、第2回転体340bの位相が先行されるので、第1回転体340aを所定角度だけ位相を遅らせた回転位置で停止させる。即ち、基準面からの位置ずれが第2回転体340bのみに集中されているので、図22(d)に示す状態から第1回転体340aを120度回転させた回転位置で停止させるのではなく、例えば、114度回転させた回転位置で停止させる。これにより、基準面からの位置ずれを第1回転体340a及び第2回転体34bに分散させて、目立たなくすることができる。
上述したように、回転体昇降ユニット300は、各収容体300が上下方向に昇降可能に形成され、下降位置では(図7参照)、第1回転体340a及び第2回転体340bを遊技盤13の背面に位置させて遊技者から視認不能とできる。よって、第1回転体340aの図形と第2回転体340bの図形との組み合わせのうちの所望の組み合わせを必要なタイミングで速やかに現出させることができる。
即ち、本実施形態では、9組の図形の組み合わせが形成可能であるが故に、テーブルが長くなる(図20のテーブルの段数が多くなる)ため、所望の組み合わせを現出させるためには、第1回転体340a及び第2回転体340bを比較的多く回転させる必要があり、その分、時間が嵩む。
これに対し、本実施形態では、各収容体300を下降位置に配置することで(図7参照)、第1回転体340a及び第2回転体340bを遊技者から視認不能な位置に退避させることができる。これにより、第1回転体340a及び第2回転体340bの回転を遊技者に認識されることなく、その回転位置を所定の回転位置まで事前に回転させておくことができ、その結果、必要なタイミングが到来した際には、各収容体300を上昇位置に配置し(図8参照)、第1回転体340a及び第2回転体340bの残りの回転を実行することで、所望の組み合わせを速やかに現出させることができる。
なお、各収容体300の下降位置への配置は、特定の変動パターンで第1回転体340a及び第2回転体340bを回転させる際にのみ行うようにしても良い。例えば、第1回転体340a及び第2回転体340bの回転の開始から結果の表示(回転の停止)までの時間が比較的短い変動パターンでは、各収容体300を下降位置へ配置せず、各回転体340a,340bの回転の開始から停止を、遊技者から視認可能な位置で行う一方、各回転体340a,340bの回転の開始から結果の表示(回転の停止)までの時間が比較的長い変動パターンでは、各回転体340a,340bの事前の回転を遊技者から視認不能な位置で行うようにしても良い。
この場合、本実施形態では、第1回転体340a及び第2回転体340bの下降位置における事前の回転は、所定の動作手段が動作される場合に行われる。これにより、第1回転体340a及び第2回転体340bの事前の回転が遊技者に認識されることを抑制することができる。
即ち、第1回転体340a及び第2回転体340bを回転させる際には、比較的大きな音が発生するため、下降位置に移動されて、遊技者から視認不能とされたとしても、その回転時に発生する音によって第1回転体340a及び第2回転体340bが事前に回転されていることを、遊技者に認識させてしまうおそれがある。
これに対し、第1回転体340a及び第2回転体340bの回転を、所定の動作手段の動作時に行うことで、その動作に紛れ込ませることができる。その結果、第1回転体340a及び第2回転体340bの事前の回転を遊技者に認識させ難くすることができる。
なお、動作手段としては、例えば、払出装置133、音声出力装置226、或いは、球発射ユニット112a(いずれも図3又は図4参照)が例示される。これらの動作手段が動作されている状態では、例えば、球の払出、音声の出力、或いは、球の発射に伴い、比較的大きな音が発生する。よって、遊技者に第1回転体340a及び第2回転体340bの事前の回転を認識させ難くできる。
なお、これに代えて、或いは、これに加えて、第3図柄表示装置81(図2参照)において表示される演出が所定の演出である場合に、第1回転体340a及び第2回転体340bの事前の回転を行うようにしても良い。第3図柄表示装置81に表示される演出が所定の演出である場合には、その所定の演出に遊技者の意識を集中させることができるため、その分、第1回転体340a及び第2回転体340bの事前の回転を遊技者に認識させ難くできる。
次いで、図23から図27を参照して、中央遊動ユニット400について説明する。図23は、中央遊動ユニット400の正面図である。また、図24は、中央遊動ユニット400の分解正面斜視図であり、図25は、中央遊動ユニット400の分解背面斜視図である。
図23から図25に示すように、中央遊動ユニット400は、背面ケース210の底壁部211(図6参照)に配設されるベース体410と、そのベース体410の正面に配設される一対のカバー体420と、それらカバー体420及びベース体410の対向面間に基端側が回転可能に軸支されると共に先端側を向い合せた姿勢で配置される一対のアーム体430と、それら一対のアーム体430の先端側がそれぞれ相対変位可能に連結される第1部材440と、一対の駆動モータ450の駆動力を一対のアーム体420へそれぞれ伝達する伝達機構と、を主に備える。
ベース体410は、正面視横長の矩形状に形成され、そのベース体410の長手方向両端部分にカバー体420が部分的に配設(覆設)される。ベース体410及びカバー体420の互いの対向面には、アーム体430の基端側(回転軸431)を回転可能に軸支するための軸支孔411,421がそれぞれ同軸となる位置に凹設される。
また、ベース体410の正面には、伝達機構の後述するクランクギヤ453を回転可能に軸支するための軸412が突設される。軸412の先端には、Eリング(止め輪)が嵌合可能な嵌合溝が凹設され、かかる嵌合溝に嵌合された止め輪によりクランクギヤ453が軸412から抜け出ることを規制する。
カバー体420の側壁には、切り欠き部422が開口形成され、アーム体430の回転を許容するための空間が確保される。一方で、アーム体430の回転が所定角度を越えた場合には、切り欠き部422の開口内縁をアーム体430の外面に当接させることで、アーム部材420の所定角度以上の回転を規制可能に形成される。即ち、カバー体420は、アーム部材420の所定角度以上の回転を規制するストッパとしての機能を発揮可能に形成される。
なお、ベース体410の長手方向中央には、回転体413が配設される。回転体413は、図示しない駆動モータの駆動力により回転可能に形成される部材であり、第1部材440が上昇位置に配置されると(図31(a)参照)、かかる第1部材440に遮蔽され、遊技者から視認不能とされる一方、第1部材440が下降位置に配置されると(図31(c))、第1部材440の上方に縦に並設された状態で、遊技者から視認可能とされる。
アーム体430は、正面視略く字状に屈曲して形成される長尺棒状体であり、回転軸431と、被駆動溝432と、連結ピン433とを主に備える。回転軸431は、上述したように、ベース体410及びカバー体420の軸支孔411,421に軸支される軸であり、アーム体430の基端側における正面および背面からそれぞれ同軸に突設される。アーム体430は、かかる回転軸431を回転中心として、先端側を上下方向に昇降させる態様で、ベース体410及びカバー体420に対して回転可能とされる。
被駆動溝432は、伝達機構の後述する偏心ピン454が摺動可能に挿通される部位であり、アーム体430の屈曲部分から回転軸431へ向けて延設される直線状(正面視長穴形状)の開口として形成される。後述するように、クランクギヤ453の回転に伴い偏心ピン454が被駆動溝432に沿って摺動されることで、アーム体430が回転軸431を中心として回転される。
連結ピン433は、アーム体430の先端側における正面から突設される棒状体であり、第1部材440の背面に形成される摺動溝441aに沿って摺動可能に挿通される。かかる連結ピン433を介して、アーム体430と第1部材440とが相対移動可能に連結される。
なお、第1部材440の摺動溝441aに挿通された連結ピン433の先端には、後述するように、第1部材430の組み立て工程において、カラー(図示せず)が締結固定され、かかるカラーが連結ピン433の摺動溝441aからの抜け止めとされる。また、アーム体430には、屈曲部分を挟んで被駆動溝432と反対側となる位置の正面に回転体434が配設される。回転体434は、アーム体430の背面側に配設される駆動モータ435の駆動力により回転可能に形成される。
伝達機構は、上述したように、駆動モータ450の駆動力をアーム体420へ伝達するための機構であり、駆動モータ450が取り付けられた取付板451と、駆動モータ450の駆動軸に固着されるピニオンギヤ452と、そのピニオンギヤ452に歯合されるクランクギヤ453と、そのクランクギヤ453の回転中心(軸412)から偏心して位置する偏心ピン454と、を主に備える。
取付板451は、ベース体410の正面であって、カバー体420の上方となる位置に配設され、ピニオンギヤ452が、取付板451とベース体410との対向面間に収納される。偏心ピン454は、クランクギヤ453の正面から突設され、アーム体430の被駆動溝432に挿通される。なお、偏心ピン454の先端には、Eリング(止め輪)が嵌合可能な嵌合溝が凹設され、かかる嵌合溝に嵌合された止め輪により偏心ピン454が被駆動溝432から抜け出ることを規制する。
伝達機構によれば、駆動モータ450の回転駆動力が、ピニオンギヤ452を介してクランクギヤ453に伝達され、クランクギヤ453が所定回転角(本実施形態では略180度)だけ回転されると、そのクランクギヤ453の回転中心から偏心する偏心ピン454が円弧状の軌跡を描きつつ正面視上下方向に変位される。これにより、アーム体430が、被駆動溝432を摺動する偏心ピン454によって、上方へ押し上げられる又は下方へ押し下げられ、回転軸431を回転中心として回転される(図31参照)。
第1部材440は、上述したように、摺動溝441aに挿通された連結ピン433を介して、アーム体430に相対変位可能に連結される部材であり、一対のアーム体430がそれぞれ独立に回転されることで、後述するように、直線運動と回転運動とを組み合わせた態様で遊動可能とされる(図33及び図34参照)。ここで、図26及び図27を参照して、第1部材440の詳細構成について説明する。
図26は、第1部材440の分解正面斜視図であり、図27は、第1部材440の分解背面斜視図である。
図26及び図27に示すように、第1部材440は、基体441と、その基体441の正面および背面にそれぞれ配設される正面体442及び背面体443と、基体441の背面に回転可能に配設される腕部材444と、その腕部材444を回転させるための駆動力を発生する駆動モータ445と、その駆動モータ445の駆動力を腕部材444に伝達するクランク部材446と、を主に備える。
基体441は、第1部材440の骨格をなす部材であり、正面視円形の板状に形成される。基体441には、一対の摺動溝441aが開口形成される。各摺動溝441aは、直線状に延設される正面視長穴形状の開口として形成され、一対が非平行に配設される。詳細には、一対の摺動溝441aは、基体441の正面視において、中央から両端へ向けて上昇傾斜される正面視逆ハ字状に配設される。
基体441の背面には、摺動溝441aの内縁に対応して形成される筒状の筒部441bが立設されると共に、腕部材444を回転可能に軸支するための軸441cが突設される。
筒部441bには、アーム体430の連結ピン433(図24及び図25参照)が摺動可能に挿通される。即ち、筒部441bの内周面により連結ピン433を支持できるので、その分、連結ピン433の支持面積を拡大して、アーム体430に対する第1部材440の相対変位を安定化させることができる。
正面体442は、第1部材440の正面を形成する部材であり、基体441と略同径の正面視円形であって所定の厚み寸法を有する円板状に形成される。正面体442は、光透過性の材料から形成されると共に、その正面体442の内部には、複数の発光手段(本実施形態ではLED)が配設される。よって、複数の発光手段を発光(点灯または点滅)させることで、正面体442の正面および外周面を透過した光を、正面および外周面から外部へ向けて照射することができる。これにより、正面体442の全体(正面および外周面)が発光しているように遊技者に視認させることができる。
なお、正面体442は、基体441にアーム体430の連結ピン433が連結された後に、基体441に配設(締結固定)される。即ち、基体441の摺動溝441aには、背面側からアーム体430の連結ピン433が挿通され、基体441の正面側に突出された連結ピン433の先端に、少なくとも基体441の筒部441bの溝幅よりも大きな直径のカラー(図示せず)が装着(締結固定)され、かかるカラーが連結ピン433の基体441からの抜け止めとされる。
腕部材444は、正面体442の直径寸法よりも長い長尺状の部材であり、軸支孔444aと、被駆動溝444bとを備える。軸支孔444aは、正面体441の軸441aに軸支される孔であり、腕部材444の長手方向中央となる位置に穿設される。被駆動溝444bは、クランク部材446の偏心ピン446bが摺動可能に挿通される部位であり、被軸支孔444aの下方において腕部材444の長手方向と直交して延設される直線状(正面視長穴状)の開口として形成される。
腕部材444は、その両端部分を正面体442の両側から外方へ張り出した姿勢で(図23参照)、基体441及び背面体443の対向面間で軸441aに回転可能に軸支され、後述するように、クランク部材446の回転に伴い偏心ピン446bが被駆動溝444bに沿って摺動されることで、軸支孔444bを中心として回転される。
クランク部材446は、基体441及び背面体443の対向面間に配設される部材であり、駆動モータ445の駆動軸に固着される回転本体446aと、その回転本体446aの回転中心(駆動モータ445の駆動軸)から偏心して位置する偏心ピン446bとを備える。偏心ピン446bは、回転本体446aの正面から突設され、腕部材444の被駆動溝444bに挿通される。
クランク部材446の回転本体446aが駆動モータ445の回転駆動力により回転されると、その回転本体446aの回転中心から偏心する偏心ピン446bが所定半径の円軌跡を描きつつ変位される。これにより、被駆動溝444bが偏心ピン446bによって、左右へ交互に押し引きされ、所定回転角(本実施形態では略30度)の回転を正逆方向に交互に繰り返す態様で、軸支孔444a(軸441c)を回転中心として腕部材444が回転される(図39及び図40参照)。
これにより、後述するように、正面体442の両側から左右に張り出す腕部材444の両端部分を、互い違いに上下に往復動作させる態様で、腕部材444の動作を遊技者に視認させることができる。また、かかる腕部材440の往復動作をアーム体430の停止中に行うことで、後述するように、往復動作の反作用(慣性力)を基体441及び正面体442に作用させ、アーム体430に対して正面体442が相対変位する動作を遊技者に視認させることができる。
次いで、図28から図29を参照して、左右回転ユニット500について説明する。なお、左右回転ユニット500は、背面ケース210の開口211aを挟んで左右に一対が配設されるところ(図6参照)、これら一対の左右回転ユニット500は、左右対称の形状に形成される点を除き、実質的に同一の構成で形成されるので、一方(正面視左側に配設されるもの)についてのみ説明し、他方の説明は省略する。
図28は、左右回転ユニット500の正面図である。また、図29は、左右回転ユニット500の分解正面斜視図であり、図30は、左右回転ユニット500の分解背面斜視図である。
図28から図30に示すように、左右回転ユニット500は、正面視矩形状の背面ベース511と、その背面ベース511の正面側に重ね合わされる正面ベース512と、その正面ベース513の正面に配設されるカバー体513と、背面ベース511の背面側に配設される駆動モータ520と、その駆動モータ520の駆動力により背面ベース511及び正面ベース512に対して回転される変位部材530と、その変位部材530へ駆動モータ520の駆動力を伝達する伝達機構と、を主に備える。
背面ベース511及びカバー体513の互いの対向面には、変位部材530の基端側(回転軸531)を回転可能に軸支するための軸支孔511a,513aがそれぞれ同軸となる位置に凹設される。正面ベース512には、変位部材530の回転軸531が挿通される開口512aと、伝達機構の後述するクランクギヤ540の偏心ピン542が挿通される開口512bとが開口形成される。
変位部材530は、正面に羽根状の装飾が施された部材であり、回転軸531と、被駆動孔532とを主に備える。回転軸531は、上述したように、背面ベース511及びカバー体513の軸支孔511a,513aに軸支される軸であり、変位部材530の基端側(図29下側)における正面および背面からそれぞれ同軸に突設される。変位部材530は、かかる回転軸531を回転中心として、正面視において正面ベース512と重なる退避位置と背面ケース210の開口211a(図8参照)側へ張り出す張出位置との間で回転可能とされる(図7及び図8参照)。
被駆動孔432は、伝達機構の後述するリンク部材550の連結ピン552が回転可能に軸支される孔であり、回転軸531から先端側へ所定距離だけ離間した位置に凹設される。後述するように、クランクギヤ540の回転がリンク部材550を介して被駆動孔432に伝達されることで、変位部材530が回転軸531を中心として回転される。
伝達機構は、上述したように、駆動モータ520の駆動力を変位部材530へ伝達するための機構であり、駆動モータ520の駆動軸に固着されるピニオンギヤ521と、そのピニオンギヤ521に歯合されるクランクギヤ540と、そのクランクギヤ453を変位部材530に連結するリンク部材550と、を主に備える。
クランクギヤ540は、背面ベース511及び正面ベース512の対向面間に回転可能に保持されるギヤであり、その回転中心から偏心する位置に偏心ピン541が正面へ向けて突設される。リンク部材550には、正面ベース512と変位部材530との対向面間に配設される棒状体であり、長手方向一端側の背面に連結孔551が凹設されると共に、長手方向他端側の正面から連結ピン552が突設される。
クランクギヤ540の偏心ピン541は、正面ベース512の開口512bを介して、リンク部材550の連結孔551に回転可能に軸支され、リンク部材550の連結ピン552は、変位部材530の被駆動孔532に回転可能に軸支される。これにより、変位部材530とクランクギヤ540とがリンク部材550を介して連結され、クランク機構が構成される。
伝達機構によれば、駆動モータ520の回転駆動力が、ピニオンギヤ521を介してクランクギヤ540に伝達され、クランクギヤ540が所定回転角(本実施形態では略180度)だけ回転されると、そのクランクギヤ453の回転中心から偏心する偏心ピン541が円弧状の軌跡を描きつつ変位されると共に、その偏心ピン541の変位がリンク部材550を介して変位部材530へ伝達される。即ち、変位部材530の基端側が、リンク部材550によって、左右方向へ交互に押し引きされる。これにより、変位部材530が、回転軸431を回転中心として、上述した退避位置と張出位置との間で回転される(図7及び図8参照)。
次いで、以上のように構成された中央遊動ユニット400の動作について、図31から図41を参照して説明する。なお、以下においては、説明の便宜のため、一対のアーム体430に対し、第1部材440を正面視した際に左側(図31左側)及び右側(図31右側)に位置するものを、それぞれ「左」のアーム体430及び「右」のアーム体430と称す。
図31(a)から図31(c)は、中央遊動ユニット400の正面図であり、図31(a)は上昇位置に配置された状態に、図31(b)は上昇位置および下降位置の間に配置された状態に、図31(c)は下降位置に配置された状態に、それぞれ対応する。
また、図32(a)から図32(c)は、中央遊動ユニット400の断面背面図であり、図32(a)は図31(a)における、図32(b)は図31(b)における、図32(c)は図31(c)における、中央遊動ユニット400の断面背面図にそれぞれ対応する。
なお、図32(a)から図32(c)は、連結ピン433に直交する平面で切断して第1部材440の背面を視認する断面図に対応する。また、左右のアーム体430の外形が二点鎖線を用いて模式的に図示される一方、背面体443、駆動モータ450及びクランク部材446の図示が省略される。後述する図35、図36、図38及び図40においても同様であるので、以下においてはその説明を省略する。
図31(a)及び図32(a)に示すように、中央遊動ユニット400が上昇位置に配置された状態では、左右のアーム体430が共に先端側(連結ピン433側)を上方に振り上げた姿勢とされ、第1部材440が最上方に位置される。左右のアーム体430の各連結ピン433は、第1部材440の径方向外縁に近い側の各摺動溝441aの終端(以下「外側終端」と称す)に近接して位置される。この場合、連結ピン433と摺動溝441の外側終端との間には所定の隙間が形成される。
図31(a)及び図32(a)に示す状態から、一対の駆動モータ450がそれぞれ回転駆動され、各クランクギヤ453が回転されると、そのクランクギヤ453の偏心ピン454が被駆動溝432を摺動しつつ、左右のアーム体430をそれぞれ下方へ押し下げる。
これにより、左右のアーム体430が回転軸431(図24及び図25参照)を回転中心として回転され、図31(b)及び図32(b)に示すように、第1部材440が下方へ変位される。この状態から、一対の駆動モータ450の回転駆動により各クランクギヤ453が更に回転されると、左右のアーム体430が更に下方へ押し下げられて、図31(c)及び図32(c)に示すように、中央遊動ユニット400が下降位置に配置される。
図31(c)及び図32(c)に示すように、中央遊動ユニット400が下降位置に配置された状態では、左右のアーム体430が共に先端側(連結ピン433側)を下方に振り下げた姿勢とされ、第1部材440が最下方に位置し第3図柄表示装置81(図2参照)の前面側に張り出された状態が形成される。また、第1部材440の上方には、回転体413が遊技者から視認可能に露出される。
左右のアーム体430の各連結ピン433は、第1部材440の中心に近い側の各摺動溝441aの終端(以下「内側終端」と称す)に近接して位置される。この場合、連結ピン433と摺動溝441の内側終端との間には所定の隙間が形成される。なお、本実施形態では、下降位置における連結ピン433と内側終端との間の隙間が、上昇位置における連結ピン433と外側終端との間の隙間よりも大きくなるように設定される。
これにより、後述するように、慣性の作用や腕部材444の動作を利用して、第1部材440をアーム部材430に対して相対変位させる場合には(図37及び図38参照)、下降位置における相対変位量を大きくできる。即ち、第3図柄表示装置81(図2参照)の前面側において、第1部材440を大きな変位で動作させることができる。
図31(c)及び図32(c)に示す状態(下降位置)から、上述した場合とは逆方向に一対の駆動モータ450がそれぞれ回転駆動されると、各クランクギヤ453の回転に伴い、偏心ピン454が被駆動溝432を摺動しつつ、左右のアーム体430をそれぞれ上方へ押し上げることで、最終的に、図31(a)及び図32(c)に示すように、中央遊動ユニット400が上昇位置に配置される。
このように、中央遊動ユニット400によれば、第1部材440を上昇位置と下方位置との間で昇降させることができる。しかしながら、第1部材440の昇降の一例として説明した上記動作は、第1部材440が、上昇位置と下降位置との間を同じ姿勢を維持しつつ直線運動するものであり、その第1部材440の動きの変化が乏しい。
これに対し、本実施形態では、左右のアーム体430が互いに独立して変位(回転)可能に形成されると共に、それら左右のアーム体430のそれぞれの先端側(連結ピン433)が、第1部材440(摺動溝441a)に相対変位(摺動)可能に連結されるので、左右のアーム体430の回転の態様に応じて、第1部材440の動きに変化を与えつつ昇降させることもできる。かかる動作の一例について、図33から図36を参照して説明する。
図33(a)から図33(c)及び図34(a)から図34(c)は、中央遊動ユニット400の正面図であり、図33(a)は上昇位置に配置された状態に、図33(b)、図33(c)、図10(a)及び図10(b)は上昇位置および下降位置の間に配置された状態に、図10(c)は下降位置に配置された状態に、それぞれ対応する。
また、図35(a)から図35(c)及び図36(a)から図36(c)は、中央遊動ユニット400の断面背面図であり、図35(a)から図35(c)は図33(a)から図33(c)における中央遊動ユニット400の断面背面図にそれぞれ対応し、図36(a)から図36(c)は図10(a)から図10(c)における中央遊動ユニット400の断面背面図にそれぞれ対応する。
図33(a)及び図35(a)に示すように、中央遊動ユニット400が上昇位置に配置された状態から、右のアーム体430に対応する駆動モータ450のみを回転駆動して、先端側(連結ピン433)が下方(図33(a)下方向)へ向かう回転方向へ向けて、右のアーム体430を回転させる(なお、以下、この回転を「下方への回転」と称す)。
この右のアーム体430の下方への回転により、右(図35(a)では左側)のアーム体430の連結ピン433が摺動溝441aを下方へ押し下げることで、図33(b)及び図35(b)に示すように、第1部材40を右肩下がりの姿勢に変化(傾斜)させることができる。
ここで、停止状態にある左(図35(a)では右側)のアーム体430は図237(a)に示すように、上昇位置において、連結ピン433と摺動溝441aにおける外側終端との間に所定の隙間が形成されている。この場合、第1部材440が右肩下がり(図35(b)では左肩下がり)の姿勢に変化(傾斜)されると、左のアーム体430の連結ピン433が連結されている摺動溝441aの傾斜がより急角度となり、かかる連結ピン433と摺動溝441aとの間に形成される隙間の方向が、重力の作用による第1部材440の移動(落下)を許容する方向に配置される。
よって、図33(a)及び図35(a)に示す上昇位置から、右のアーム体430のみを下方へ回転させると、所定の回転位置までは、第1部材440を右のアーム体430の回転に従動させて変位させることができる一方、所定の回転位置に達した後は、第1部材440を重力の作用による自由落下によって、図33(b)及び図35(b)に示す状態に配置することができる。
即ち、右のアーム体430が所定の回転位置に達するまでは、右のアーム体430の下方への回転に従動していた第1部材440を、所定の回転位置に達した後は、右のアーム体430の下方への回転に従動させず、自由落下によって下方へ急激に変位させて右のアーム体430の変位から先行させることができる。その結果、第1部材440の動きに変化を与えることができる。
図33(b)及び図35(b)に示す状態から、右のアーム体430が更に下方へ回転されると、右(図35(b)では左側)のアーム体430の連結ピン433が摺動溝441aを更に下方へ押し下げることで、図33(c)及び図35(c)に示すように、第1部材40の右肩下がりの姿勢を更に急角度に変化(傾斜)させることができる。
この場合、左(図35(b)では右側)のアーム体430が停止状態にあると共に、その連結ピン433が摺動溝441aの外側終端に達していることから、この連結ピン433(図35(b)では右側)を回転中心として第1部材440を回転させることができ、右のアーム体430の下方への回転に伴って、第1部材440を正面視において左のアーム体430側(図33左側)へ押し込んだ状態を形成することができる。
即ち、図33(a)の上昇位置から図33(c)に示す状態までの過程において、右のアーム体430の下方への回転に伴って、第1部材440を、下方(図33下方向)への直線運動と、右肩下がりとなる方向(図33時計回り)への回転運動と、左方(図33左方向)への直線運動とを組み合わせた動きで変位させることができ、その動きに変化を与えることができる。
図33(c)及び図35(c)に示す状態に達すると、左のアーム体430の連結ピン433に加え、右のアーム体430の連結ピン433も摺動溝441aの外側終端に位置するため、かかる右のアーム体430の下方への回転が規制される。よって、この状態からは、次いで、左(図33(c)左側)のアーム体430を下方へ回転させる。
この左のアーム体430の下方への回転により、左(図35(c)では右側)のアーム体430の連結ピン433が摺動溝441aを下方へ押し下げることで、図34(a)及び図36(a)に示すように、第1部材40を右肩下がりの姿勢から水平な姿勢に変化(復帰)させることができる。
ここで説明する動作の一例では、図34(a)及び図36(a)に示す状態から、左のアーム体430を、カバー体420の切欠き部422により規制される位置まで、更に下方へ回転させる。これにより、左(図36(a)では右側)のアーム体430の連結ピン433が摺動溝441aを更に下方へ押し下げることで、上述した場合(図33参照)とは逆に、図34(b)及び図36(b)に示すように、第1部材40を左肩下がりの姿勢に変化(傾斜)させることができる。
図34(b)及び図36(b)に示す状態に達すると、左のアーム体430が既に最下方まで回転されており、それ以上の下方の回転が規制されるので、この状態からは、次いで、右(図34(b)では左側)のアーム体430を、カバー体420の切欠き部422により規制される位置まで、下方へ回転させる。これにより、図34(c)及び図36(c)に示すように、第1部材40を、左肩下がりの姿勢から水平な姿勢に変化(復帰)させると共に、最下方となる位置に配置することができる。即ち、下降位置に配置される。
このように、本実施形態の中央遊動ユニット400によれば、左右のアーム体430が互いに独立して変位(回転)可能に形成されると共に、それら左右のアーム体430のそれぞれの先端側(連結ピン433)が、第1部材440(摺動溝441a)に相対変位(摺動)可能に連結されるので、左右のアーム体430を互いに独立に変位させることで、第1部材440に直線運動と回転運動とを組み合わせた動きを付与可能として、その動きに変化を与えることができる。
特に、左右のアーム体430は、その基端側(回転軸431)がベース体410及びカバー体420に回転可能に軸支され、かかる基端側を中心として回転されるので、左右のアーム体430の先端側(連結ピン433)のそれぞれを、中心位置が互いに異なる円弧状の軌跡に沿って移動させることができる。その結果、左右のアーム体430が直線状にスライド変位される場合と比較して、直線運動および回転運動をより複雑に組み合わせた動きを第1部材440に付与することができ、より大きな変化をその動きに与えることができる。
ここで、本実施形態の中央遊動ユニット400によれば、上昇位置または下降位置に配置された第1部材440を、左右のアーム体430を回転させることなく、左右のアーム体430に対して惰性(慣性の作用)により相対変位させることができる。この第1部材440の変位について、下降位置における変位を一例として、図37及び図38を参照して説明する。
図37(a)から図37(c)は、下降位置に配置された中央遊動ユニット400の正面図であり、図37(a)では第1部材440が中央に位置する状態が、図37(b)及び図37(c)では図37(a)に図示する状態から第1部材440が左右に横揺れされた状態が、それぞれ図示される。
また、図38(a)から図38(c)は、中央遊動ユニット400の断面背面図であり、図38(a)から図38(c)は図37(a)から図37(c)における中央遊動ユニット400の断面背面図にそれぞれ対応する。
図37(a)及び図38(a)に示すように、下降位置(基準位置)に配置された状態では、左右のアーム体430の各連結ピン433は、第1部材440の各摺動溝441aの外側終端および内側終端のそれぞれとの間に隙間を有する位置に配置される。よって、左右のアーム体430が停止されている状態であっても、上述した隙間の分、アーム体430に対する第1部材440の相対変位を許容することができる。
例えば、左右のアーム体430の一方または両方を所定速度で変位(回転)させた後に停止させることで、その停止に伴い発生する慣性力を第1部材440に作用させ、各連結ピン433が各摺動溝441aの外側終端または内側終端へ向けて往復動する変位を形成することができる。即ち、図37及び図38に示すように、左右のアーム体430の変位(回転)を停止させた後において、第1部材440を惰性(慣性の作用)により左右に往復動(横揺れ)させることができ、その動きに変化を与えることができる。
この場合、本実施形態では、第1部材440の一対の摺動溝441aは、それぞれ直線状に形成されると共に、非平行に配置されるので、左右のアーム体430の変位を停止させ、第1部材440を左右のアーム体430に対して惰性(慣性の作用)により相対変位させる際には、第1部材440の動きに回転成分を付与することができる。これにより、第1部材440を、直線運動のみでなく、直線運動に回転運動を組み合わせた動きで、左右に往復動(横揺れ)させることができ、その結果、第1部材440の動きに変化を与えることができる。
また、各摺動溝441aが直線状に形成されることで、左右のアーム体430の変位(回転)に伴い、連結ピン433が摺動溝441aに沿って摺動する際には、抵抗を抑制して、スムーズに摺動させることができる。これにより、左右のアーム体430の変位に伴う第1部材440の変位を安定化することができると共に、各駆動モータ450の負荷を抑制できる。
更に、本実施形態では、一対の摺動溝441aが略ハの字状に配置されるので、第1部材440の左右への往復動が収束して停止した後は、その停止状態に第1部材440を維持することができる。よって、例えば、他のユニットや表示装置による演出が行われ、中央遊動ユニット400が上昇位置に退避されて待機する状態において、第1部材440がアーム体430に対して外乱によりがたつくことを抑制できる。その結果、摺動溝441aや連結ピン433の摩耗を抑制できる。
ここで、上述したようにアーム体430の停止後に第1部材440を惰性(慣性の作用)により左右に往復動させることは、第1部材が上昇位置と下降位置との間を同じ姿勢を維持しつつ直線運動するのみの構造(即ち、左右のアーム体が独立して変位することができない従来品)では、不可能であり、本実施形態のように左右のアーム体430を独立して変位可能に構成したことで初めて可能となったものである。これにより、第1部材440の動きに変化を与えることができる。
即ち、第1部材が上昇位置と下降位置との間を同じ姿勢を維持しつつ直線運動するのみの構造(従来品)では、アーム体が停止されても、その停止に伴い第1部材に作用する慣性力が、その第1部材を左右に往復動(鉾揺れ)させるきっかけとは成り得ない。
これに対し、本実施形態では、第1部材440が傾斜した姿勢とされた状態から、一方のアーム体430は停止状態のまま、他方のアーム体430のみを変位(回転)させることで、第1部材440を基準位置(例えば、下降位置)に配置できるので(図34及び図35参照)、他方のアーム体430の停止に伴う慣性力を、第1部材440を左右に往復動(横揺れ)させるきっかけとすることができる。その結果、第1部材440の左右への往復動を確実に発生させることができると共に、その左右への往復動の振幅を大きくすることができる。
なお、ここでは、第1部材440を左右のアーム体430に対して惰性(慣性の作用)で左右に往復動(横揺れ)させる位置として、下降位置を一例として説明したが、上記構成から理解できる通り、他の位置においても可能である。即ち、左右のアーム体430が停止された状態において、各連結ピン433と第1部材440の各摺動溝441aの外側終端および内側終端のそれぞれとの間に隙間を有する位置であれば、いずれの位置であっても良い。よって、上昇位置または下降位置に限られず、上昇位置と下降位置との間の任意の位置で左右への往復動(横揺れ)を発生させることができる。また、左右のアーム体430が停止される回転位置は、同じ回転位置である必要はなく、異なる回転位置(即ち、第1部材440が傾斜姿勢となる位置)で停止されても良い。
次いで、第1部材440の腕部材444の変位を利用して、第1部材440を左右へ往復動(横揺れ)させる動作について、図39及び図40を参照して説明する。即ち、本実施形態の中央遊動ユニット400によれば、上述した惰性(慣性の作用)による第1部材440の左右への往復動が収束した後でも、第1部材440を、左右のアーム体430を回転させることなく、左右へ往復動させることができる。
図39(a)から図39(c)は、下降位置に配置された中央遊動ユニット400の正面図であり、図39(a)では第1部材440が中央に位置する状態が、図39(b)及び図39(c)では図39(a)に図示する状態から第1部材440が左右に横揺れされた状態が、それぞれ図示される。
また、図40(a)から図40(c)は、中央遊動ユニット400の断面背面図であり、図40(a)から図40(c)は図39(a)から図39(c)における中央遊動ユニット400の断面背面図にそれぞれ対応する。
図39(a)及び図40(a)に示すように、下降位置(基準位置)に配置された状態では、左右のアーム体430の各連結ピン433は、上述したように、第1部材440の各摺動溝441aの外側終端および内側終端のそれぞれとの間に隙間を有する位置に配置される。よって、左右のアーム体430が停止されている状態であっても、上述した隙間の分、アーム体430に対する第1部材440の相対変位を許容することができる。
即ち、第1部材440は、基体441の背面に腕部材444が配設されるので、かかる腕部材444を駆動モータ445の駆動力により変位(回転)させることで、その反力を基体441に作用させることができ、その反力の作用により各連結ピン433を各摺動溝441aの外側終端または内側終端へ向けて往復動させることができる。その結果、左右のアーム体430が停止状態であっても、第1部材440を左右へ往復動(横揺れ)させることができる。
具体的には、図39(a)及び図40(a)に示すように、左右のアーム体430が停止されると共にその左右のアーム体430に対して第1部材440が停止され、腕部材444が中立位置に位置する状態から、図39(b)及び図40(b)に示すように、かかる腕部材444を正面視時計回り(右回り)に回転させることで、その反力の作用により、基体441及び正面体442を正面視反時計回り(左回り)に回転させることができると共に、図39(c)及び図40(c)に示すように、腕部材444を正面視反時計回り(右回り)に回転させる。
これにより、腕部材444の回転に伴う反力の作用により、基体441及び正面体442を正面視時計回り(左回り)に回転させることができる。その結果、第1部材440を左右に往復動(横揺れ)させることができ、その動きに変化を与えることができる。
この場合、本実施形態では、第1部材440は、腕部材444が、基体441に回転可能に軸支され、駆動モータ445から付与される駆動力により回転されるので、腕部材444の変位に伴う反力を、基体441及び正面体442に対して回転方向へ作用させやすくすることができる。その結果、基体441及び正面体442の動きに回転の成分を発生させやすくできる。
特に、本実施形態では、腕部材444の回転中心(基体441の軸441c)が左右のアーム体430の一対の連結ピン433の左右方向中央に位置されるので、腕部材444の回転に伴う反力を、第1部材430(基体441及び正面体442)の回転運動に繋げやすくできる。
なお、ここでは、腕部材444の回転時の反力により第1部材440を左右に往復動(横揺れ)させる位置として、下降位置を一例として説明したが、上記構成から理解できる通り、他の位置においても可能である。即ち、左右のアーム体430が停止された状態において、各連結ピン433と第1部材440の各摺動溝441aの外側終端および内側終端のそれぞれとの間に隙間を有する位置であれば、いずれの位置であっても良い。よって、上昇位置または下降位置に限られず、上昇位置と下降位置との間の任意の位置で左右への往復動(横揺れ)を発生させることができる。また、左右のアーム体430が停止される回転位置は、同じ回転位置である必要はなく、異なる回転位置(即ち、第1部材440が傾斜姿勢となる位置)で停止されても良い。
ここで、第1部材440にその姿勢を検出するセンセ装置を設け、そのセンサ装置の検出結果に基づいて、腕部材444の回転状態を変更する制御を行っても良い。これにより、第1部材440の動きを速やかに収束させる、或いは、第1部材440を左右に往復動(横揺れ)させることができる。
例えば、左右のアーム体430の変位(回転)が停止され、この停止に伴って、第1部材440が惰性(慣性の作用)により左右のアーム体430に対して左右に往復動(横揺れ)される際には(図37及び図38参照)、その第1部材440の基体441及び正面体442の往復動を弱めるように腕部材444を回転させる(腕部材444の回転により発生する反力を、基体441及び正面体442の運動を打ち消す方向へ作用させる)。これにより、第1部材440の動きを速やかに収束させることができる。
或いは、第1部材440の動きが収束して停止している状態、又は、第1部材440が惰性(慣性の作用)により左右に往復動(横揺れ)されている状態から、第1部材440の基体441及び正面体442を往復動させる又はその往復動を強めるように腕部材444を回転させる(腕部材444の回転により発生する反力を、基体441及び正面体442の運動を増幅させる方向へ作用させる)。これにより、第1部材440を左右に往復動させることができると共に、腕部材444の回転状態に応じて、第1部材440の左右への往復動に変化を付与することができる。
なお、センサとしては、第1部材440の腕部材444を除く他の部分(例えば、基体441、正面体442又は背面体443など)に配設されその3方向の加速度を検出する加速度センサ(例えば、静電容量型、ピエゾ型など)、アーム体430及び第1部材440の間の距離を検出する距離センサ(例えば、三角測距式やタイム・オブ・フライト式など)などが例示される。距離センサでは、少なくとも2箇所に設け、アーム体430に対する第1部材440(基体441や正面体442)の相対姿勢を検出するように構成する。
次いで、中央遊動ユニット400と左右回転ユニット500との連携について、図41を参照して説明する。
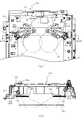
図41(a)は、中央遊動ユニット400及び左右回転ユニット500の正面図であり、図41(b)は、中央遊動ユニット400及び左右回転ユニット500の上面図であり、図41(c)は、図41(b)のXLIc−XLIc線における中央遊動ユニット400及び左右回転ユニット500の断面背面図である。
なお、図41(a)から図41(c)では、中央遊動ユニット400が下降位置に、左右回転ユニット500が張出位置に、それぞれ配置された状態が図示される。また、図41(a)から図41(c)では、図面を簡素化して、理解を容易とするために、各ベース体410,511,512やカバー体420,513等の図示が省略され、説明に必要な主要な構成のみが図示される。
図41に示すように、本実施形態では、中央遊動ユニット400が下降位置に配置された状態で、左右回転ユニット500が張出位置に配置されると、中央遊動ユニット400の第1部材440(基体441)の背面に立設される一対の筒部441bに対し、左右回転ユニット500の一対の変位部材530がそれぞれ当接可能に形成される。これにより、第1部材430の動きを規制することができる。
例えば、上昇位置に配置されていた中央遊動ユニット400を左右のアーム体430の下方への回転により下降位置に配置した際に、同時に、左右回転ユニット500を張出位置に配置して、第1部材440(筒部441b)に変位部材530を当接させることで、上述した場合のように(図37及び図38参照)、第1部材440が惰性(慣性の作用)により左右に往復動(横揺れ)されることを規制することができる。
或いは、第1部材440の腕部材444を変位(回転)させる場合に、第1部材440(筒部441b)に変位部材530を当接させることで、腕部材444の変位の反作用により、第1部材(基体441及び正面体442)が左右に往復動(横揺れ)されることを規制することができ、これにより、正面体442は停止状態に維持しつつ、腕部材444のみを変位させる態様を遊技者に視認させることができる。
このように、本実施形態によれば、左右回転ユニット500の変位部材530の配設位置に応じて(即ち、変位部材530を筒部441bに当接させるか否かを切り替えることで)、腕部材444の変位に伴う反力で第1部材540(基体441及び正面体442)を腕部材444と共に変位させる態様と、第1部材540(基体441及び正面体442)を停止状態に維持しつつ、腕部材444のみを変位させる態様とを選択的に形成することができる。
次いで、図42から図48を参照して、左右センサ装置600について説明する。まず、図42及び図43を参照して、左右センサ装置600と中央遊動ユニット400との関係について説明する。
図42(a)及び図43(a)は、左右センサ装置600の正面図であり、図42(b)及び図43(b)は、図42(a)のXLIIb−XLIIb線および図43(a)のXLIIIb−XLIIIb線における左右センサ装置600の断面図である。図42では第1部材440が上昇位置に、図43では第1部材440が下降位置に、それぞれ配置された状態が図示される。
なお、図42及び図43では、図面を簡素化して、理解を容易とするために、背面ケース210、第1部材440及びガラスユニット16の板ガラス16aのみが図示され、他の構成の図示が省略される。また、図42及び図43では、第1センサ610及び第2センサ620からそれぞれ照射された光の経路および板ガラス16aに照射された光の照射領域S1,S2が二点鎖線を用いて模式的に図示される。後述する図44及び図45においても同様であり、その説明は省略する。
図42及び図43に示すように、左右センサ装置600は、ガラスユニット16の板ガラス16aの前方における遊技者の手指を検出し、その有無(存在)や位置、或いは、動作方向や動作速度を取得するためのセンサであり、背面ケース210の開口211aを挟んで左右に配設される第1センサ610及び第2センサ620を備える。なお、第1センサ610は、回転体昇降ユニット300の中央ユニット300Cにおける正面ベース312の上端側に配設され(図9参照)、第2センサ620は、背面ケース210の底壁部211に配設される。
第1センサ610及び第2センサ620は、発光部および受光部を備える光センサとして形成され、板ガラス16aに照射される光の照射領域S1,S2が、板ガラス16aの幅方向(図42(a)左右方向)中央で重なりを有するように、発光部を内側へ向けた傾斜姿勢で配設される。よって、上述したように、遊技盤13(センターフレーム86)の開口部を挟んでそれぞれ開口部の内縁よりも幅方向の奥まった位置(幅方向外側となる位置)に各センサ装置610,620を配設することができ、遊技者から視認され難くできる。
この場合、板ガラス16aの前方(図42(a)紙面手前側、図42(b)下側)であって、照射領域S1,S2の斜め前方(発光部からの照射方向に沿う方向での前方)に遊技者の手指が存在する場合には、発光部から照射され板ガラス16aを透過した光が、遊技者の手指で反射され、その反射された光が受光部で受光されることで、遊技者の手指の存在が検出される。
左右センサ装置600は、第1センサ610及び第2センサ620を左右に配設し、板ガラス16aの前方2か所(照射領域S1,S2のそれぞれに対応する領域)での検出を行うことができるので、両センサ610,620のそれぞれの検出結果に基づいて、遊技者の手指の位置(照射領域S1又は照射領域S2のいずれの前方に位置するか)、動作方向(照射領域S1から照射領域S2へ向かう方向またはその逆方向)或いは動作速度(照射領域S1,S2間を横切る際の速度)を検出できる。
ここで、本実施形態では、例えば、図43に示すように、左右センサ装置600(第1センサ610及び第2センサ620)の光の経路が、第1部材440の移動領域に重なるように設定される。即ち、第1部材440が左右センサ装置の検出領域(第1センサ610及び第2センサ620と板ガラス16aとの間の光の経路)の少なくとも一部に重なる位置まで変位可能に形成される。
この場合、第1部材440は、図43(a)及び図43(b)に示すように、板ガラス16aの前方(図43(a)紙面手前側、図43(b)下側)であって、照射領域S1の斜め前方(第1センサ610の発光部からの照射方向に沿う方向での前方)における領域(以下「第1センサ610の検出領域」と称す)と、板ガラス16aの前方であって、照射領域S2の斜め前方(第2センサ620の発光部からの照射方向に沿う方向での前方)における領域(以下「第2センサ620の検出領域」と称す)とを区画する位置に変位可能とされる。
これにより、板ガラス16aの前方において、第1センサ610の検出領域と第2センサ620の検出領域とを確実に切り離すことができる。よって、第1センサ610の検出領域にある遊技者の手指を第2センサ620が、第2センサ620の検出領域にある遊技者の手指を第1センサ610が、それぞれ検出することを確実に回避できる。
よって、例えば、遊技者に二者択一の選択をさせる演出(例えば、第3図柄表示装置81の表示領域内の左右2箇所(第1センサ610の検出領域に対応する位置と第2センサ620の検出領域に対応する位置の2箇所)に選択対象(例えば、図形や文字)が表示され、その選択対象に対応する2箇所の領域(検出位置)のいずれかに遊技者が手指を近づけることで、いずれか一方を選択する演出)を行う場合に、その遊技者の選択動作の検出精度を高めることができる。
また、中央遊動ユニット400は、上述したように、左右のアーム体430が互いに独立して変位(回転)可能に形成されると共に、第1部材440(基体441)に腕部材444が相対変位可能に配設されるので、第1部材440を上下方向に沿って直線状に昇降させるだけでなく、第1部材440を左右に往復動(横揺れ)させることができる(図39参照)。また、第1部材440の停止位置を左右方向のいずれか一方へ偏らせることができる(図33及び図34参照)。
これにより、第1部材440の動き(位置)に応じて、第1センサ610の検出領域または第2センサ620の検出領域のうちの少なくとも一方または両方の大きさを変更することができる。よって、例えば、第3図柄表示装置81に表示される選択対象の表示態様の変化に応じて、遊技者に自分の手指を移動させて、その手指が検出される位置(検出領域)を探させるという演出を行うことができる。
また、例えば、第1部材440が第1センサ610の検出領域または第2センサ620の検出領域のうちの一方を遮蔽して、検出不能とすることもできるので、第3図柄表示装置81には選択対象を手指により選択することを遊技者に指示する表示がなされているにも関わらず、第1部材440が検出領域の一方を遮蔽して、遊技者の選択動作の邪魔をするという演出を行うことができる。或いは、第1部材440が検出領域の一方を遮蔽することで、他方を選択するように遊技者に促す指示を第3図柄表示装置81に表示するという演出を行うことができる。
図44(a)は、左右センサ装置600の正面図であり、図44(b)は、図44(a)のXLIVb−XLIVb線における左右センサ装置600の断面図である。
上述したように、第1部材440は、正面体442が光透過性の材料から形成されると共に、内部に複数の発光手段(LED)が配設され、それら複数の発光手段を発光(点灯または点滅)させることで、正面体442の正面および外周面を透過した光を、正面および外周面から外部へ向けて照射させることができる。これにより、正面体442の全体(正面および外周面)が発光しているように遊技者に視認させることができる。
この場合、第1部材440の正面体442(特に、その正面体442の外周面)から外部へ向けて照射された光が、第1センサ610及び第2センサ620に入射されると、入射された光と発光部から発光された光との干渉が発生することや入射された光を受光部が直接受光することに起因して、誤検出を招く。
これに対し、本実施形態によれば、図44に示すように、正面体442(特に、外周面)から外部へ照射された光が、第1センサ610及び第2センサ620へ入射されることを遮蔽可能な位置(正面体442と各センサ610,620とを結ぶ仮想線(図44(b)の破線矢印)を横切る位置、以下「遮蔽位置」と称す)に、変位部材530が変位可能に形成される。よって、正面体442の発光手段を発光させる際には、変位部材530を遮蔽位置へ変位させることで、発光手段から発光された光から各センサ610,620を変位部材530により遮蔽することができ、その結果、各センサ610,620の誤検出を抑制できる。
また、このように、発光手段から発光された光が第1センサ610及び第2センサ620へ入射されることを遮蔽するための手段を、変位部材530に兼用させることで、常設の遮蔽部材を設けることを不要として、その分、部品コストの削減を図ることができる。一方、発光手段の発光が行われない際には、変位部材530を遮蔽位置から退避させることができるので、その分、常設の遮蔽部材を設ける場合と比較して、スペースを確保できる。よって、変位部材530の退避により確保されるスペースを、他の変位部材が変位するためのスペースとして利用することができる。
更に、第1部材440(正面体442)は、上昇位置と下降位置との間を昇降可能に形成されるところ(図33及び図34参照)、その第1部材440の変位位置に応じて、変位部材530を変位(回転)させて遮蔽位置に配置することができる。即ち、第1部材440の動きに変位部材530を追従させることができる。よって、第1部材440の配置(昇降位置)に関わらず、第1センサ610及び第2センサ620を変位部材530により遮蔽することができる。
即ち、第1部材440の可動範囲の全範囲に対応できるように、常設の遮蔽部材を設ける場合には、かかる遮蔽部材の配設に大きなスペースが必要となるところ、変位部材530であれば、第1部材440の変位(昇降位置)に応じて自身が遮蔽位置へ変位することができるので、変位部材530を小型化することが可能となる。よって、常設の遮蔽部材を不要とできる分、部品コストの削減とスペースの確保とを達成できるだけでなく、変位部材530を駆動するための駆動モータ520の負担を軽減することができる。
次いで、図45を参照して、左右センサ装置600と左右回転ユニット500との関係について説明する。
図45(a)は、左右センサ装置600の正面図であり、図45(b)は、図45(a)のXLVb−XLVb線における左右センサ装置600の断面図である。
図45に示すように、左右回転ユニット500は、左右の変位部材530が退避位置(図7参照)と張出位置(図8参照)との間を変位(回転)可能にそれぞれ形成され、それら退避位置および張出位置に左右の変位部材530が配置されたことを検出するセンサ(図示せず)が設けられているところ、左右の変位部材530は、退避位置と張出位置との間となる中間位置(所定位置)において、第1センサ610の検出領域および第2センサ620の検出領域に重なる(横切る)ようにそれぞれ形成される。
左右センサ装置600は、左右回転ユニット500の各変位部材530が中間位置(所定位置)に配置されたことを、各センサ610,620によって、それぞれ独立に検出可能に形成される。これにより、板ガラス16aの前方における対象物F(図46参照)の有無を検出する手段と、変位部材530の中間位置への配置を検出する手段とを、第1センサ610及び第2センサ620に兼用させることができる。よって、変位部材530が中間位置に配置されたことを検出するためのセンサを別途設けることを不要として、その分、製品コストの削減を図ることができる。
なお、左右センサ装置600の各センサ610,620によって左右回転ユニット500の各変位部材530が検出される位置を、中間位置ではなく、張出位置としても良い。変位部材530が張出位置へ配置されたことを検出するためのセンサを別途設けることを不要として、その分、製品コストの削減を図ることができる。
次いで、図46を参照して、左右センサ装置600により板ガラス16aの汚れDを検出する方法について説明する。
図46(a)及び図46(b)は、ガラスユニット16の板ガラス16aの部分拡大上面図であり、図42(b)に対応する。なお、図46では、第1センサ610の発光部から発光された光の経路が二点鎖線を用いて模式的に図示される。また、図42(a)では、第1センサ610の検出領域に存在する対象物Fが、図42(b)では、照射領域S1(図42(a)参照)に付着する汚れDが、それぞれ模式的に図示される。
図46(a)に示すように、例えば、第1センサ610(図42参照)の検出領域に対象物F(遊技者の手指)が存在する場合、第1センサ610の発光部から照射された光は、板ガラス16aを所定の屈折角で屈折しつつ透過した後、対象物Fで反射され、往路と同じ経路を辿ることで、第1センサ610の受光部に受光される。これにより、第1センサ610により遊技者の手指の存在が検出される。
この場合、第1センサ610及び第2センサ620は、互いの発光部および受光部を内側へ向けた傾斜姿勢で配設されることで(図42参照)、上述したように、遊技盤13の開口部を挟んでそれぞれ開口部の内縁よりも幅方向の奥まった位置(幅方向外側となる位置)での配設が可能となり(図6参照)、これら各センサ610,620を遊技者から視認され難くできる。
しかしながら、この場合には、図46(b)に示すように、第1センサ610の発光部から発光された光の板ガラス16aに対する入射角が大きくなる(入射方向と板ガラス16aとが平行に近くなる)ため、板ガラス16aに汚れD(例えば、遊技者の手の脂など)が付着されていると、その汚れDによって光が往路とは異なる方向へ反射してしまい、反射光を第1センサ610の受光部に受光させることができない。よって、板ガラス16aへの汚れDの付着の有無を第1センサ610によって検出することができない。
これに対し、本実施形態によれば、第1センサ610及び第2センサ620が互いの発光部および受光部を内側へ向けた傾斜姿勢で配設されるので、板ガラス16aの照射領域S1に汚れDが付着される場合には、第1センサ610の発光部から発光され光を、第2センサ620の受光部が検出することができ、これにより、板ガラス16aへの照射領域S1への汚れDの付着の有無を検出できる。なお、照射領域S2への汚れDの有無は、第2センサ620の発光部から発光され光を、第1センサ610の受光部が検出するか否かに基づいて判断できる。
即ち、第1センサ610の発光部から発光した光が、第2センサ620の受光部により受光される場合には照射領域S1への汚れDの付着があり、第2センサ620の受光部により受光されない場合には照射領域S1への汚れDの付着はない、とそれぞれ判断できる。同様に、第2センサ620の発光部から発光した光が、第1センサ610の受光部により受光される場合には照射領域S2への汚れDの付着があり、第1センサ610の受光部により受光されない場合には照射領域S2への汚れDの付着はない、とそれぞれ判断できる。
ここで、第1センサ610及び第2センサ620による板ガラス16aの汚れDの有無の検出は、パチンコ機10の電源投入時の処理において行うことが好ましい。パチンコ機10の電源投入時は、遊技者が入店していないため、板ガラス16aの前方(各センサ610,620の検出領域)に対象物F(遊技者の手指)が存在しない。よって、対象物Fと汚れDとの区別(例えば、対象物で反射する場合の経路長と汚れDで反射する場合の経路長との差に基づいて、発光から受光までに要する時間に閾値を設ける)を行う必要がなく、その分、板ガラス16aの汚れDの有無の検出精度を高めることができるからである。
次いで、図47から図50を参照して、第2実施形態について説明する。図47(a)は、第2実施形態における収容体330の側面図であり、図47(b)は、図47(a)の矢印XLVIIb方向視における収容体330の正面図である。なお、図47(a)は、図18(a)に対応する。また、図47(a)及び図47(b)では、側壁体332、隔壁体334及び装飾体335が取り外された状態が図示される。
第1実施形態では、駆動モータ350が回転駆動されると、その回転が第1回転体340a及び第2回転体340bへ伝達機構により常時伝達される場合を説明したが、第2実施形態における伝達機構は、駆動モータ350の回転の第2回転体340bへの伝達を断続的とすることが可能に形成される。なお、上記第1実施形態と同一の部分には同一の符号を付して、その説明は省略する。
図47(a)及び図47(d)に示すように、第2実施形態における伝達機構は、駆動モータ350の駆動軸に固着される駆動ギヤ351と、その駆動ギヤ351に順に歯合される伝達ギヤ352、第1ギヤ2353、中間ギヤ2354及び第2ギヤ2355からなる歯車列とを備える。
第1ギヤ2353は、第1実施形態における第1ギヤ353に対して歯数のみが異なり、他の構成は同一に形成される。なお、第1ギヤ2353の歯数は20に設定される。一方、第2ギヤ2355は、第1実施形態のける第2ギヤ355に対して厚み寸法のみが異なり、他の構成は同一に形成される。即ち、第2ギヤ2355の歯数は20に設定される。よって、第1ギヤ2353と第2ギヤ2355とは実質的に同一の歯車として形成される。
中間ギヤ2354は、第1ギヤ2353と第2ギヤ2355との間に介在される歯車であり、2枚の歯車(第1側中間ギヤ2354a及び第2側中間ギヤ2354b)を軸方向(図47(b)左右方向)に同心に重ね合わせて一体化した部材として形成される。
第1側中間ギヤ2354aには、第1ギヤ2353の歯と歯合可能な歯が全周にわたって形成される。よって、第1ギヤ2353(第1回転体340a)が回転されている間は、その回転に同期して、中間ギヤ2354(第1側中間ギヤ2354a及び第2側中間ギヤ2354b)が常に回転される。なお、第1側中間ギヤ2354aは歯数が21に設定される。
第2側中間ギヤ2354bは、第1側中間ギヤ2354aの歯の一部を省略した点を除き他の構成は第1側中間ギヤ2354aと同一の歯車として形成される。詳細には、第2側中間ギヤ2354bには、7個の歯を省略(除去)した領域である非歯合領域と、その非歯合領域の残部の領域(即ち、14個の歯が周方向に連続する領域)である歯合領域とが形成される。
第2側中間ギヤ2354bの非歯合領域では、歯が省略(除去)され、第2ギヤ2355の歯と歯合不能とされるため、中間ギヤ2354bから第2ギヤ2355への回転の伝達が遮断される。一方、第2側中間ギヤ2354bの歯合領域では、第2ギヤ2355の歯と歯合可能とされ、中間ギヤ2354bから第2ギヤ2355へ回転が伝達される。
この場合、第2側中間ギヤ2354bの非歯合領域は、歯数が21に設定される第1側中間ギヤ2354aに対し、7個の歯を省略することで形成される領域であるので、中心角が120度とされ、歯合領域は、残りの14個の歯に対応する領域であるので、中心角が240度とされる。
よって、第2回転体340bは、第2側中間ギヤ2354bと第2ギヤ2355とが非歯合とされる非歯合領域に対応する区間では、停止されており、第2側中間ギヤ2354bと第2ギヤ2355とが歯合される始業領域に対応する区間では、回転される。従って、第1回転体340aが360度回転されると、中間ギヤ2354も360度回転される一方、第2回転体340bは、240度だけ回転される。
次いで、第2実施形態における第1回転体340a及び第2回転体340bの回転動作について説明する。
図48は、第1回転体340a及び第2回転体340bの図形の組み合わせを示すテーブルである。また、図49及び図50は、第1回転体340a及び第2回転体340bが回転される際の遷移状態を示す第1回転体340a及び第2回転体340bの側面模式図であり、図49(a)から図49(e)は、図48にNo.1〜5として示す状態に、図50(a)から図50(d)は、図48にNo.6〜9として示す状態に、それぞれ対応する。
なお、図48から図50では、第1実施形態の場合と同様に、第1回転体340aの第1表示板343A〜第3表示板343Cを符号「A〜C」を用いて、第2回転体340aの第1表示板343A〜第3表示板343Cを符号「A’〜C’」を用いて、それぞれ図示する。
ここで、第1回転体340aの第1表示板343A及び第2回転体340bの第1表示板343Aをそれぞれ視認位置に配置した状態(図48のNo.1及び図49(a)に示す状態)を以下「初期状態」と称す。この初期状態では、第2ギヤ2355に対する中間ギヤ2354の位相は、歯合領域と非歯合領域との一側の境界位置(歯合領域の終端、非歯合領域の始端)に設定される(図47(a)参照)。
図48のNo.1及び図49(a)に示すように、第1回転体340aの第1表示板343A及び第2回転体340bの第1表示板343Aをそれぞれ視認位置に配置した状態から(図48のNo.1「A’,A」、第1の組み合わせ)、第1回転体340aを120度回転させその第2表示板343Bを視認位置に配置させると、第2回転体340bは、中間ギヤ2354(第2側中間ギヤ2354b)における非歯合領域の作用により回転が伝達されず、停止状態に維持される。
その結果、図48のNo.2及び図49(b)に示すように、第2回転体340bは第1表示板343Aが視認位置に配置された状態に維持される。これにより、第2の組み合わせ(図48のNo.2「A’,B」)を形成することができる。
なお、図48のNo.2及び図49(b)に示す状態では、初期状態(図49(a)参照)から第1回転体340a(第1ギヤ2353)が120度回転され、これに伴って、中間ギヤ2354も120度回転されているので、第2ギヤ2355に対する中間ギヤ2354の位相が、歯合領域と非歯合領域との他側の境界位置(歯合領域の始端、非歯合領域の終端)に配置される。
図48のNo.2及び図49(b)に示す状態から、第1回転体340aを120度回転させその第3表示板343Cを視認位置に配置させると、第2回転体340bは、中間ギヤ2354(第2側中間ギヤ2354b)における歯合領域(中心角240度のうちの前半の120度の領域)の作用により120度回転される。
その結果、図48のNo.3及び図49(c)に示すように、第2回転体340bは第2表示板343Bを視認位置に配置させる。これにより、第3の組み合わせ(図48のNo.3「B’,C」)を形成することができる。
図48のNo.3及び図49(c)に示す状態から、第1回転体340aを120度回転させその第3表示板343Aを視認位置に配置させると、第2回転体340bは、中間ギヤ2354(第2側中間ギヤ2354b)における歯合領域(中心角240度のうちの後半の120度の領域)の作用により120度回転される。
その結果、図48のNo.4及び図49(d)に示すように、第2回転体340bは第3表示板343Cを視認位置に配置させる。これにより、第4の組み合わせ(図48のNo.4「C’,A」)を形成することができる。
なお、図48のNo.4及び図49(d)に示す状態では、初期状態(図49(a)参照)から第1回転体340a(第1ギヤ2353)が360度回転され、これに伴って、中間ギヤ2354も360度回転されているので、第2ギヤ2355に対する中間ギヤ2354の位相が、歯合領域と非歯合領域との一側の境界位置(歯合領域の終端、非歯合領域の始端)に配置される。
以降は、上述した態様(図48のNo.1及び図49(a)に示す状態から図48のNo.3及び図49(c)に示す状態までの区間の回転)と実質的に同一の態様が、更に2回繰り返されることで、1サイクルが完了される(テーブルが始点から終点まで一巡される)。
この場合、図48のNo.4〜No.6に示す状態の区間では、図49(a)〜図49(c)における第1回転体340aの位相を120度異ならせた状態に置き換えて考えれば良く、第5の組み合わせ(図48のNo.5「C’,B」)及び第6の組み合わせ(図48のNo.6「A’,C」)を形成することができる。
また、図48のNo.7〜No.9に示す状態の区間では、図49(a)〜図49(c)における第1回転体340aの位相を240度異ならせた状態に置き換えて考えれば良く、第7の組み合わせ(図48のNo.7「B’,A」)、第8の組み合わせ(図48のNo.8「B’,B」)及び第9の組み合わせ(図48のNo.9「C’,C」)を形成することができる。
以上のように、本実施形態によれば、駆動モータ350の回転を第1回転体340a及び第2回転体340bのそれぞれへ伝達する伝達機構が複数の歯車からなる歯車列として形成され、そのうちの1の歯車(中間歯車2354)には、相手の歯車(第2ギヤ2355)と歯合して回転を伝達する歯合領域と、相手の歯車に対して非歯合となり回転の伝達を遮断する非歯合領域とが形成される。
これにより、第1回転体340aを回転させつつ第2回転体340bを一時的に停止させることができるので、第1回転体340a及び第2回転体340bの図形の組み合わせを変更することができる。その結果、1個の駆動モータ350のみで、組み合わせ可能な最大数である9組の組み合わせを形成することができると共に、その組み合わせを任意に選択することができる。その結果、部品コストの削減を図りつつ、各回転体340a,340bの回転による効果的な演出を行うことができる。
特に、本実施形態によれば、第1回転体340aを回転させつつ第2回転体340bを停止させる状態と、第1回転体340a及び第2回転体340bの両者を回転させる状態との2つの状態を形成することができる。即ち、第1回転体340aを回転させつつ第2回転体340bの回転を停止させると共に、その第2回転体340bの停止を解除して回転を再開させることができるので、第1回転体340a及び第2回転体340bの図形の組み合わせを視認する遊技者の興趣を高めることができる。
また、本実施形態の伝達機構によれば、回転方向の方向性を有さないので、駆動モータ350の回転方向を正逆切り替えることで、図48に示すテーブルの進行方向を切り替えることができる。よって、例えば、第1の組み合わせ(図48のNo.1「A’,A」)が形成された状態から、第8の組み合わせ(図48のNo.8「B’,B」)を現出させる場合に、図48のテーブルを正方向(図48下方向)へ進行して、第8の組み合わせを現出させることに加え、図48のテーブルを逆方向(図48上方向)へ進行して、第9の組み合わせを現出させることもできる。
これにより、前者の場合のように、図48のNo.7からNo.8への移行において、第2回転体340bを停止させた状態で、第1回転体340aのみを回転させて、第8の組み合わせ(図48のNo.8「B’,B」)を現出させる(即ち、一方には「B’」が既に現出されている状態で、他方を「A」から「B」に切り替えて、「B’,B」を現出させる)演出と、後者の場合のように、図48のNo.9からNo.8への移行において、第1回転体340a及び第2回転体340bの両者を回転させて、第8の組み合わせ(図48のNo.8「B’,B」)を現出させる(即ち、一方および他方の両方の図形が切り替えられて「B’,B」を現出させる)演出とを遊技状態に応じて任意に選択して実行することができる。
また、前者の場合には、第1回転体340aの120度の回転を7回繰り返すことが必要となるのに対し、後者の場合には、第1回転体340aの120度の回転を2回行えば良いので、所望の図形の組み合わせを速やかに現出させることができる。
ここで、本実施形態では、中間ギヤ2354(第2側中間ギヤ2354b)に非歯合領域が形成され、第1回転体340aが回転されている間、第2回転体340bの回転と停止とが切り替えられ、図形の組み合わせが変更される。この場合、中間ギヤ2354における非歯合領域の形成範囲が、第1回転体340a及び第2回転体340bの外周面に複数描かれた図形の間隔に対応して設定される。即ち、第1回転体340a及び第2回転体340bが第1表示板343Aから第3表示板343Cをそれぞれ備え、各外周面に描かれる図形が120度間隔で配置されることから、非歯合領域の形成範囲(中心角)が120度に設定される。
これにより、第1回転体340aと第2回転体340bとの位相がずれないので、第1回転体340aの図形と第2回転体340bの図形との組み合わせを要素とする図48に示すテーブルの長さを短く(テーブルの段数を少なく)することができる。よって、所望の図形の組み合わせを現出させるのに必要とされる第1回転体340a及び第2回転体340bの回転数を抑制できる。即ち、所望の図形の組み合わせを現出させるのに必要な時間を短縮できる。
但し、中間ギヤ2354における非歯合領域の形成範囲を、第1回転体340a及び第2回転体340bの外周面に複数描かれた図形の間隔に非対応に設定しても良い。例えば、非歯合領域の形成範囲を中心角108度の範囲とした場合には、第1実施形態の場合と同様に、第1回転体340a及び第2回転体340bの位相のずれを生じさせることができる。よって、図形の組み合わせを複数(例えば、9組)形成可能としつつ、図形が組み合わされない状態も形成可能として、遊技者に図形のずれ(組み合わせの非成立)を視認させることができる。
次いで、図51から図54を参照して、第3実施形態について説明する。図51(a)は、第3実施形態における収容体330の側面図であり、図51(b)は、図51(a)の矢印LIb方向視における収容体330の正面図である。なお、図51(a)は、図18(a)に対応する。また、図51(a)及び図51(b)では、側壁体332、隔壁体334及び装飾体335が取り外された状態が図示される。
第2実施形態では、中間ギヤ2354に非歯合領域と歯合領域とがそれぞれ1箇所ずつ形成される場合を説明したが、第3実施形態における中間ギヤ3354には、非歯合領域と歯合領域とがそれぞれ2箇所ずつ形成される。なお、上記各実施形態と同一の部分には同一の符号を付して、その説明は省略する。
図51(a)及び図51(d)に示すように、第3実施形態における伝達機構は、駆動モータ350の駆動軸に固着される駆動ギヤ351と、その駆動ギヤ351に順に歯合される伝達ギヤ352、第1ギヤ3353、中間ギヤ3354及び第2ギヤ3355からなる歯車列とを備える。
第1ギヤ3353は、第1実施形態における第1ギヤ353に対して厚み寸法のみが異なり、他の構成は同一に形成される。即ち、第1ギヤ3353の歯数は20に設定される。一方、第2ギヤ3355は、第1実施形態のける第2ギヤ355に対して歯数および厚み寸法が異なり、他の構成は同一に形成される。なお、第2ギヤ3355の歯数は20に設定される。よって、第1ギヤ3353と第2ギヤ3355とは実質的に同一の歯車として形成される。
中間ギヤ3354は、第1ギヤ3353と第2ギヤ3355との間に介在される歯車であり、2枚の歯車(第1側中間ギヤ3354a及び第2側中間ギヤ3354b)を軸方向(図51(b)左右方向)に同心に重ね合わせて一体化した部材として形成される。
第1側中間ギヤ3354aには、第1ギヤ3353の歯と歯合可能な歯が全周にわたって形成される。よって、第1ギヤ3353(第1回転体340a)が回転されている間は、その回転に同期して、中間ギヤ3354(第1側中間ギヤ3354a及び第2側中間ギヤ3354b)が常に回転される。なお、第1側中間ギヤ3354aは歯数が35に設定される。
第2側中間ギヤ3354bは、第1側中間ギヤ3354aの歯の一部を省略した点を除き他の構成は第1側中間ギヤ3354aと同一の歯車として形成される。詳細には、第2側中間ギヤ3354bには、7個の歯を省略(除去)した領域である第1の非歯合領域X1及び第2の非歯合領域X2と、それら第1の歯合領域X1及び第2の非歯合領域X2の間の一方に位置し7個の歯が周方向に連続する領域である第1の歯合領域Y1と、その第1の歯合領域Y1から位相を180度異ならせて第1の歯合領域X1及び第2の非歯合領域X2の間の他方に位置し14個の歯が周方向に連続する領域である第2の歯合領域Y2とが形成される。
よって、本実施形態では、第1回転体340a(第1ギヤ3353)を360度回転させると、第1の歯合領域Y1では、第2回転体340b(第2ギヤ3355)を120度回転させると共に、第2の歯合領域Y2では、第2回転体340b(第2ギヤ3355)を240度回転させることができる。一方、第1の非歯合領域X1及び第2の非歯合領域X2では、第2回転体340b(第2ギヤ3355)が停止されている間に、第1回転体340a(第1ギヤ3353)をそれぞれ120度回転させることができる。
次いで、第3実施形態における第1回転体340a及び第2回転体340bの回転動作について説明する。
図52は、第1回転体340a及び第2回転体340bの図形の組み合わせを示すテーブルである。また、図53及び図54は、第1回転体340a及び第2回転体340bが回転される際の遷移状態を示す第1回転体340a及び第2回転体340bの側面模式図であり、図53(a)から図53(d)は、図52にNo.1〜4として示す状態に、図54(a)及び図54(b)は、図52にNo.5,6として示す状態に、それぞれ対応する。
なお、図52から図54では、第1実施形態の場合と同様に、第1回転体340aの第1表示板343A〜第3表示板343Cを符号「A〜C」を用いて、第2回転体340aの第1表示板343A〜第3表示板343Cを符号「A’〜C’」を用いて、それぞれ図示する。
ここで、第3実施形態における初期状態は、第2実施形態の場合と同様に、第1回転体340aの第1表示板343A及び第2回転体340bの第1表示板343Aをそれぞれ視認位置に配置した状態とされる。この初期状態では、第2ギヤ3355に対する中間ギヤ3354の位相は、第1の歯合領域Y1と第1の非歯合領域X1との境界位置(第1の歯合領域Y1の終端、第1の非歯合領域X1の始端)に設定される(図51(a)参照)。
図52のNo.1及び図53(a)に示すように、第1回転体340aの第1表示板343A及び第2回転体340bの第1表示板343Aをそれぞれ視認位置に配置した状態から(図52のNo.1「A’,A」、第1の組み合わせ)、第1回転体340aを120度回転させその第2表示板343Bを視認位置に配置させると、第2回転体340bは、中間ギヤ3354(第2側中間ギヤ3354b)における第1の非歯合領域X1の作用により回転が伝達されず、停止状態に維持される。
その結果、図52のNo.2及び図53(b)に示すように、第2回転体340bは第1表示板343Aが視認位置に配置された状態に維持される。これにより、第2の組み合わせ(図52のNo.2「A’,B」)を形成することができる。
なお、図52のNo.2及び図53(b)に示す状態では、初期状態(図53(a)参照)から第1回転体340a(第1ギヤ3353)が120度回転され、これに伴って、第2ギヤ3355に対する中間ギヤ3354の位相が、第1の非歯合領域X1と第2の歯合領域Y2との境界位置(第2の歯合領域Y2の始端、第1の非歯合領域X1の終端)に配置される。
図52のNo.2及び図53(b)に示す状態から、第1回転体340aを120度回転させその第3表示板343Cを視認位置に配置させると、第2回転体340bは、中間ギヤ3354(第2側中間ギヤ3354b)における第2の歯合領域Y2(14個の歯のうちの前半の7個の歯)の作用により120度回転される。
その結果、図52のNo.3及び図53(c)に示すように、第2回転体340bは第2表示板343Bを視認位置に配置させる。これにより、第3の組み合わせ(図52のNo.3「B’,C」)を形成することができる。
図52のNo.3及び図53(c)に示す状態から、第1回転体340aを120度回転させその第3表示板343Aを視認位置に配置させると、第2回転体340bは、中間ギヤ3354(第2側中間ギヤ3354b)における第2の歯合領域Y2(14個の歯のうちの後半の7個の歯)の作用により120度回転される。
その結果、図52のNo.4及び図53(d)に示すように、第2回転体340bは第3表示板343Cを視認位置に配置させる。これにより、第4の組み合わせ(図52のNo.4「C’,A」)を形成することができる。
なお、図52のNo.4及び図53(d)に示す状態では、初期状態(図53(a)参照)から第1回転体340a(第1ギヤ3353)が360度回転され、これに伴って、第2ギヤ3355に対する中間ギヤ3354の位相が、第2の歯合領域Y2と第2の非歯合領域X2との境界位置(第2の歯合領域Y2の終端、第2の非歯合領域の始端)に配置される。
図52のNo.4及び図53(d)に示す状態から、第1回転体340aを120度回転させその第2表示板343Bを視認位置に配置させると、第2回転体340bは、中間ギヤ3354(第2側中間ギヤ3354b)における第2の非歯合領域X2の作用により回転が伝達されず、停止状態に維持される。
その結果、図52のNo.5及び図54(a)に示すように、第2回転体340bは第3表示板343Cが視認位置に配置された状態に維持される。これにより、第5の組み合わせ(図52のNo.5「C’,B」)を形成することができる。
なお、図52のNo.5及び図54(a)に示す状態では、初期状態(図53(a)参照)から第1回転体340a(第1ギヤ3353)が480度(120度×4)回転され、これに伴って、第2ギヤ3355に対する中間ギヤ3354の位相が、第2の非歯合領域X2と第1の歯合領域Y1との境界位置(第2の非歯合領域Xの終端、第1の歯合領域Y1の始端)に配置される。
図52のNo.5及び図54(a)に示す状態から、第1回転体340aを120度回転させその第3表示板343Cを視認位置に配置させると、第2回転体340bは、中間ギヤ3354(第2側中間ギヤ3354b)における第2の歯合領域Y2(7個の歯)の作用により120度回転される。
その結果、図52のNo.6及び図54(b)に示すように、第2回転体340bは第1表示板343Aを視認位置に配置させる。これにより、第6の組み合わせ(図52のNo.6「A’,C」)を形成することができる。
なお、図52のNo.6及び図54(b)に示す状態では、中間ギヤ3354が、初期状態(図53(a)参照)から360度回転される。即ち、中間ギヤ3354は、初期状態に復帰され、第2ギヤ3355に対する位相が、第1の歯合領域Y1と第1の非歯合領域X1との境界位置(第1の歯合領域Y1の終端、第1の非歯合領域X1の始端)に設定される(図53(a)参照)。
よって、以降は、上述した態様(図52のNo.1及び図53(a)に示す状態から図52のNo.6及び図54(b)に示す状態までの区間の回転)と実質的に同一の態様が、繰り返される。その結果、1サイクル(テーブルの始点から終点までの一巡)の間に、9組の組み合わせを形成することができる。なお、本実施形態では、1サイクルのテーブルの段数が15段とされる。
以上のように、本実施形態によれば、駆動モータ350の回転を第1回転体340a及び第2回転体340bのそれぞれへ伝達する伝達機構が複数の歯車からなる歯車列として形成され、そのうちの1の歯車(中間歯車3354)には、相手の歯車(第2ギヤ3355)と歯合して回転を伝達する歯合領域(第1及び第2の歯合領域Y1,Y2)と、相手の歯車に対して非歯合となり回転の伝達を遮断する非歯合領域(第1及び第2の非歯合領域Y1,Y2)とが形成される。
これにより、第1回転体340aを回転させつつ第2回転体340bを一時的に停止させることができるので、第1回転体340a及び第2回転体340bの図形の組み合わせを変更することができる。その結果、1個の駆動モータ350のみで、組み合わせ可能な最大数である9組の組み合わせを形成することができると共に、その組み合わせを任意に選択することができる。その結果、部品コストの削減を図りつつ、各回転体340a,340bの回転による効果的な演出を行うことができる。
特に、本実施形態によれば、中間ギヤ3354には、第2ギヤ3355への回転の伝達を遮断する非歯合領域(第1及び第2の非歯合領域X1,X2)が2箇所に分散配置され、歯合領域と非歯合領域とが周方向に交互に配置される。よって、例えば、図52のNo.4からNo.7で示す状態のように、第2回転体340bの回転の停止を2種の図形で連続させることができる。よって、第1回転体340a及び第2回転体340bの図形の組み合わせを視認する遊技者の期待感や興趣を高めることができる。
また、本実施形態の伝達機構によれば、回転方向の方向性を有さないので、駆動モータ350の回転方向を正逆切り替えることで、図52に示すテーブルの進行方向を切り替えることができる。よって、例えば、図52のテーブルをNo.4からNo.7までの間で進行方向を正逆切り替えることで、第1回転体340aと第2回転体340bとの回転速度を遊技者に異ならせて視認させることができる。
次いで、図55を参照して、第4実施形態について説明する。図55(a)は、第4実施形態における中央遊動ユニット4400の上面図であり、図55(b)は、図55(a)の矢印LVb方向視における中央遊動ユニット4400の背面図である。また、図55(c)は、図55(a)の状態からアーム体4430が下方へ回転された状態における中央遊動ユニット4400の背面図である。なお、図55では、図面を簡素化して、理解を容易とするために、ベース体410やカバー体420等の図示が省略され、説明に必要な主要な構成のみが図示される。
第1実施形態では、第1部材440に摺動溝441aが形成されると共に、アーム体430に連結ピン433が形成される場合を説明したが、第4実施形態における摺動溝4439及び連結ピン4449は、それぞれアーム体4430及び第1部材4440に形成される。なお、なお、上記各実施形態と同一の部分には同一の符号を付して、その説明は省略する。
図55(a)から図55(c)に示すように、第4実施形態における中央遊動ユニット4400は、一対のアーム体4430のそれぞれの先端側に摺動溝4439が開口形成されると共に、それら各摺動溝4439に挿通される一対の連結ピン4449が第1部材4440の背面から突設される。
摺動溝4439は、直線状に延設される正面視長穴形状の開口として形成され、アーム体4430の長手方向に沿って延設される。連結ピン4449は、摺動溝441aに沿って摺動可能な断面円形の棒状体として形成される。摺動溝4439及び連結ピン4449を介して、アーム体4430と第1部材4440とが相対移動可能に連結される。なお、連結ピン4449の先端には、摺動溝441aの溝幅よりも大径のカラーが抜け止めとして締結固定される。
このように、本実施形態における中央遊動ユニット400によれば、摺動溝4439とその摺動溝4439に摺動可能に挿通される連結ピン4449とにより一対のアーム体4430と第1部材4440とを連結する構造において、連結ピン4449を第1部材4440から突設させ、摺動溝4439を一対のアーム体4430に形成するので、アーム体4430の変位位置(回転角度)を調整することで、摺動溝4439の向き(傾斜角度)を変化させることができる。
即ち、アーム部材4430の回転を停止させ、第1部材4440を惰性(慣性の作用)により左右に往復動(横揺れ)させる場合(図37及び図38参照)や、腕部材444を変位(回転)させることで発生する反力の作用により第1部材4440を左右へ往復動(横揺れ)させる場合(図39及び図40参照)には、アーム部材4430の回転角度を調整して、一対の摺動溝4439の間の相対角度を変化させることで、第1部材4440の往復動の態様を変化させることができる。
図55(c)に示すように、一対の摺動溝4439を略ハの字状に配置する場合には、上述したように、回転成分を付与することができるので、第1部材440を、直線運動のみでなく、直線運動に回転運動を組み合わせた動きで、左右に往復動(横揺れ)させることができる。
この場合、本実施形態によれば、一対のアーム体4430の変位位置(回転角度)を変更することで、一対の摺動溝4439の間の相対角度(ハの字の対向角度)を調整することができ、その結果、第1部材4440の左右への往復動の態様を変化させることができる。
例えば、一対の摺動溝4439の間の相対角度を小さく(ハの字の対向角度を小さく)することで、回転成分を増加させ、第1部材4440の左右への往復動(横揺れ)における回転運動の割合を増加させることができる。一方、一対の摺動溝4439の間の相対角度を大きく(ハの字の対向角度を大きく)することで、回転成分を減少させ、第1部材4440の左右への往復動(横揺れ)における直線運動の割合を増加させることができる。
特に、本実施形態によれば、図55(b)に示すように、一対の摺動溝4439を一直線上に配置することができるので、回転成分を発生させず、第1部材4440の左右への往復動(横揺れ)を直線運動のみで行わせることができる。即ち、第1部材4440が左右方向へ水平移動する態様を形成できる。
なお、このように、一対の摺動溝4439の間の相対角度を変更して、第1部材4440の左右への往復動の態様を変化させること(回転成分を含む態様と、回転成分を含まず、直線成分のみの態様との両者を可能とすること)は、第1部材440(基体441)に摺動溝441aが形成される第1実施形態では達成不可能であり、アーム体4430の先端に摺動溝4439を形成することで初めて可能となったものである。これにより、第1部材4440の動きに変化を付与できる。
次いで、第5実施形態における中央遊動ユニット400及び左右回転ユニット5500について、図56及び図57を参照して説明する。図56(a)及び図57(a)は、第5実施形態における中央遊動ユニット400及び左右回転ユニット5500の正面図であり、図56(b)及び図57(b)は、中央遊動ユニット400及び左右回転ユニット5500の断面背面図である。
なお、図56(b)及び図57(b)は、図41(c)に対応する。また、図56及び図57では、図面を簡素化して、理解を容易とするために、各ベース体410,511,512やカバー体420,513等の図示が省略され、説明に必要な主要な構成のみが図示される。
第5実施形態における左右回転ユニット5500は、第1実施形態における左右回転ユニット500(図41参照)と比較して、張出位置の位置が下方に配置される。よって、中央遊動ユニット400が下降位置に配置された状態で、左右回転ユニット5500が張出位置に配置されると、左右回転ユニット5500の変位部材530により、中央遊動ユニット400の第1部材440(基体441)の背面に立設される一対の筒部441bを下方へ押し下げることができる。
よって、図56及び図57に示すように、中央遊動ユニット400が下降位置に配置された状態で、左右回転ユニット500の左右の変位部材530をそれぞれ交互に張出位置に配置する(一方を張出位置に配置しつつ、他方を張出位置から若干後退させる動作を繰り返す)ことで、第1部材440を左右に往復動(横揺れ)させることができる。
なお、この場合には、左右の変位部材530をそれぞれ交互に張出位置に配置する動作および張出位置から後退される動作と、第1部材440の左右への往復動(横揺れ)の動作とが連動(同期)するように、左右の変位部材530を変位(回転)させても良い。第1部材440及び左右の変位部材530の全体が連動して上下左右に揺れる動きを形成でき、一体感のある大きな動きを遊技者に認識させることができる。
或いは、左右の変位部材530の一方を第1部材440(筒部441b)に衝突させ、その衝突により発生する反動(慣性)で第1部材440を左右に往復動(横揺れ)させると共に、所定時間経過後に、次いで、左右の変位部材530の他方を第1部材440(筒部441b)に衝突させ、第1部材440を引き続き左右に往復動(横揺れ)させるようにしても良い。第1部材440の左右への往復動を強調して遊技者に認識させることができる。
このように、第5実施形態によれば、アーム体430を変位させることなく、第1部材440を左右に往復動させることができる。即ち、第5実施形態によれば、中央遊動ユニット400のアーム体430の上方または下方への回転を停止させた際の惰性(慣性力の作用)により第1部材440をアーム体430に対して左右に往復動させる形態だけでなく、アーム体430の変位に起因する慣性力を利用せず、左右回転ユニット500の変位部材530の変位を利用して第1部材440を左右に往復動させる形態も形成することができる。
以上、上記実施形態に基づき本発明を説明したが、本発明は上記形態に何ら限定されるものではなく、本発明の趣旨を逸脱しない範囲内で種々の変形改良が可能であることは容易に推察できるものである。
上記各実施形態において、1の実施形態の一部または全部を他の1又は複数の実施形態の一部または全部と入れ替えて又は組み合わせて、遊技機を構成しても良い。
上記各実施形態では、回転体昇降ユニット300において、第1回転体340a及び第2回転体340bがそれぞれ表示面(第1から第3表示板343A〜343C)を3面備え、それら3面の図形を組み合わせて遊技者に視認させる場合を説明したが、必ずしもこれに限られるものではなく、第1回転体340aの表示面の面数nと第2回転体340bの表示面の面数mとが異なる値に設定されるものであっても良い。
上記各実施形態では、回転体昇降ユニット300において、駆動モータ350の駆動力を第1回転体340a及び第2回転体340bに伝達する伝達機構が、駆動ギヤ351、伝達ギヤ352、第1ギヤ353,2353,3353、中間ギヤ354,2354,3354及び第2ギヤ355,2355,3355からなる場合を説明したが、必ずしもこれに限られるものではなく、中間ギヤ354,2354,3354及び第2ギヤ355,2355,3355を少なくとも備えるものとして形成しても良い。
例えば、中間ギヤ354,2354,3354を第1回転体340aに配設すると共に、その中間ギヤ354,2354,3354に歯合可能な状態で第2ギヤ355,2355,3355を第2回転体340bに配設し、駆動モータ530の駆動軸を、中間ギヤ354,2354,3354又は第2ギヤ355,2355,3355の一方に固着する構造が例示される。かかる構造によれば、歯車の数を低減して、部品コストの削減を図ることができる。
上記各実施形態では、回転体昇降ユニット300において、基体331には、収容体330の背面(図18(b)紙面奥側)を形成する部分の正面(内面)に反射部RFを配設する場合を説明したが、必ずしもこれに限られるものではなく、他の部分に反射部RFを配設しても良い。他の部位としては、基体331の部分であって、収容体330の上面または下面を形成する部分の内面が例示される。これら各面は、第1回転体340a及び第2回転体340bが回転される際にその外周面(各表示板343A〜343C)が対面される面なので、LED344から発光された光を遊技者へ向けて視認可能に反射させることができる。
特に、本実施形態では、第1回転体340a及び第2回転体340bが断面三角形状に形成されるので、各回転体340a,340bが回転される際には、その回転に伴って、上記反射板RFが配設される基体441の各内面と各回転体340a,340bの外周面との間の隙間(図18(b)上下方向間隔)を増減させることができると共に、上記反射板RFが配設される基体441の各内面に対する各回転体340a,340bの各表示板343Aから343Cとの対向角度を変化させることができる。これにより、LED344から発光され透過部PNから照射された光を、反射部RFからの反射光として視認する遊技者に対して、その反射光の態様を変化させることができる。
上記各実施形態では、回転体昇降ユニット300において、第1回転体340a及び第2回転体340bの回転軸が互いに平行に配置される場合を説明したが、必ずしもこれに限られるものではなく、直交するものであっても良い。これにより、遊技者に対して、例えば、第1回転体340a及び第2外周面340bの外周面にそれぞれ描かれる図形を互いに直交する方向へ変位(移動)させることができる。この場合、各表示板344A〜344Cは正面視正方形上に形成することが好ましい。第1回転体340a及び第2回転体340bを並設した場合に、それらの外周面に描かれる図形の一体感を形成できるからである。
上記各実施形態では、回転体昇降ユニット300において、1の収容体330に配設される回転体(第1回転体340a及び第2回転体340b)の数が2本とされる場合を説明したが、必ずしもこれに限られるものではなく、3本以上であっても良い。
上記各実施形態では、中央遊動ユニット400において、左右のアーム体430の基端側がベース体410に回転可能に軸支される場合を説明したが、必ずしもこれに限られるものではなく、例えば、左右のアーム体430の基端側をベース体410に対してスライド変位可能に形成しても良い。スライド変位によっても、左右のアーム体430が独立に変位可能とされることで、上記各実施形態の場合と同様に、第1部材440の動きに変化を付与することができる。
上記各実施形態では、中央遊動ユニット400において、アーム体430及び第1部材440が連結ピン433及び摺動溝441aにより連結されることで、左右のアーム体430の変位(回転)時や慣性力が作用される際などに、アーム部材430に対して第1部材440が相対変位可能とされる場合を説明したが、必ずしもこれに限られるものではなく、アーム体430及び第1部材440を相対変位可能に連結する構造は他の構造であっても良い。
他の構造としては、例えば、アーム体430の先端と第1部材440とを、弾性部材(例えば、ゴム状弾性体やウレタン、金属製のコイルばね・ねじりばね、板ばねなど)を介して連結し、弾性部材の弾性変形により相対変位を可能とする構造、アーム体430の先端と第1部材440とを、軸と軸孔とにより回転可能に連結し、軸孔に対する軸の回転により相対変位を可能とする構造、アーム体430の先端と第1部材440とを、球状のボールとそのボールに球面接触するスタッドとにより連結し、スタッドに対するボールの回転により相対変位を可能とする構造、アーム体430の先端と第1部材440とを、1又は複数のリンク機構により連結し、リンク機構の変形により相対変位を可能とする構造、これらの一部または全部を組み合わせた構造、などが例示される。
上記各実施形態では、中央遊動ユニット400を上昇位置または下降位置に配置する際の動作方法を説明したが、それら各動作方法は一例であり、他の動作方法を採用することは当然可能である。よって、例えば、図33及び図34に示す動作方法において、その一部を他の動作方法に置き換えても良い。
上記各実施形態では、中央遊動ユニット400において、第1部材440を惰性(慣性の作用)により左右に往復動(横揺れ)させる場合には、左右のアーム体430を停止状態に維持する場合を説明したが、必ずしもこれに限られるものではない。例えば、第1部材440の左右への往復動が収束する前に、左右のアーム体430の一方または両方を所定振幅で周期的に変位(回転)させても良い。アーム体430の変位が所定振幅での周期的な変位なので、かかるアーム体430の動きを遊技者に認識させることなく、第1部材440の左右への往復動を形成し、惰性による往復動が継続されていると遊技者に認識させることができる。
上記各実施形態では、中央遊動ユニット400において、腕部材444が左右対称形状とされ、その重心位置が左右方向中央に位置する場合を説明したが、必ずしもこれに限られるものではなく、腕部材444の重心位置を左右方向のいずれか一方側へ偏心させても良い。これによれば、腕部材444の回転に伴い基体441に作用される反力を大きくして、第1部材440の左右への往復動(横揺れ)を大きくできると共に変化を与えることができる。
上記各実施形態では、中央遊動ユニット400及び左右回転体500,5500において、第1部材440(基体441の筒部441b)に変位部材530を直接当接させることで、第1部材440の動きを規制する或いは第1部材440に動きを発生させる場合を説明したが、必ずしもこれに限られるものではなく、第1部材440(基体441の筒部441b)と変位部材530とを非接触としつつ、同様の動作を実行可能に形成しても良い。
具体的には、第1部材440(基体441の筒部441b)又は変位部材530の一方に磁石を配設する共に、第1部材440(基体441の筒部441b)又は変位部材530の他方に磁石または鉄製部材を配設し、変位部材530が所定位置まで変位された場合に、一方の磁石と他方の磁石または鉄製部材との間で磁力が作用されることで、第1部材440の動きを規制する或いは第1部材440に動きを発生させる構造が例示される。
これによれば、第1部材440(基体441の筒部441b)と変位部材530とを非接触として、両者が当接することを回避できるので、衝突による損傷を抑制することができる。なお、第1部材440(基体441の筒部441b)又は変位部材530の他方に鉄製部材を配設する場合には、左右の変位部材530の一方と第1部材440との間に作用する磁力、及び、左右の変位部材530の他方と第1部材440との間に作用する磁力とを釣り合わせて、左右の変位部材530の間で第1部材440が引っ張られるようにすることで、非接触状態とする。
本発明を上記各実施形態とは異なるタイプのパチンコ機等に実施してもよい。例えば、一度大当たりすると、それを含めて複数回(例えば2回、3回)大当たり状態が発生するまで、大当たり期待値が高められるようなパチンコ機(通称、2回権利物、3回権利物と称される)として実施してもよい。また、大当たり図柄が表示された後に、所定の領域に球を入賞させることを必要条件として遊技者に所定の遊技価値を付与する特別遊技を発生させるパチンコ機として実施してもよい。また、Vゾーン等の特別領域を有する入賞装置を有し、その特別領域に球を入賞させることを必要条件として特別遊技状態となるパチンコ機に実施してもよい。更に、パチンコ機以外にも、アレパチ、雀球、スロットマシン、いわゆるパチンコ機とスロットマシンとが融合した遊技機などの各種遊技機として実施するようにしても良い。
なお、スロットマシンは、例えばコインを投入して図柄有効ラインを決定させた状態で操作レバーを操作することにより図柄が変動され、ストップボタンを操作することにより図柄が停止されて確定される周知のものである。従って、スロットマシンの基本概念としては、「複数の識別情報からなる識別情報列を変動表示した後に識別情報を確定表示する表示装置を備え、始動用操作手段(例えば操作レバー)の操作に起因して識別情報の変動表示が開始され、停止用操作手段(例えばストップボタン)の操作に起因して、或いは、所定時間経過することにより、識別情報の変動表示が停止して確定表示され、その停止時の識別情報の組合せが特定のものであることを必要条件として、遊技者に所定の遊技価値を付与する特別遊技を発生させるスロットマシン」となり、この場合、遊技媒体はコイン、メダル等が代表例として挙げられる。
また、パチンコ機とスロットマシンとが融合した遊技機の具体例としては、複数の図柄からなる図柄列を変動表示した後に図柄を確定表示する表示装置を備えており、球打出用のハンドルを備えていないものが挙げられる。この場合、所定の操作(ボタン操作)に基づく所定量の球の投入の後、例えば操作レバーの操作に起因して図柄の変動が開始され、例えばストップボタンの操作に起因して、或いは、所定時間経過することにより、図柄の変動が停止され、その停止時の確定図柄がいわゆる大当たり図柄であることを必要条件として遊技者に所定の遊技価値を付与する特別遊技が発生させられ、遊技者には、下部の受皿に多量の球が払い出されるものである。かかる遊技機をスロットマシンに代えて使用すれば、遊技ホールでは球のみを遊技価値として取り扱うことができるため、パチンコ機とスロットマシンとが混在している現在の遊技ホールにおいてみられる、遊技価値たるメダルと球との別個の取扱による設備上の負担や遊技機設置個所の制約といった問題を解消し得る。
以下に、本発明の遊技機に加えて上述した実施形態に含まれる各種発明の概念を示す。
<左右センサ装置600を一例とする発明の概念について>
前面側に遊技領域が形成される遊技盤と、その遊技盤の前面側に遊技媒体が通過可能な間隔を隔てて配設される光透過性の透明板と、前記遊技盤の背面側に変位可能に配設され前記遊技盤の開口を介して遊技者から視認可能とされる変位部材と、前記遊技盤の開口を介して前記透明板の前面側の物体を検出するセンサ装置と、を備えた遊技機において、前記変位部材が前記センサ装置の検出領域の少なくとも一部に重なる位置まで変位可能に形成されることを特徴とする遊技機A1。
ここで、例えば、遊技盤(前面枠の板ガラス)の前方へ向けて光を照射する発光部および対象物から反射した光を受光する受光部を備える光センサを設け、その光センサにより遊技者の手指の存在あるいは動作を検出するものが知られている(例えば、特開2010−094348号公報)。この場合、光センサの光(照射光および反射光)の経路は、変位可能に形成された変位部材の移動領域に重ならないように設定される(例えば、特開2010−094348号公報の段落0045及び第5図など)。そのため、光センサと変位部材とは互いに関連を持たない関係とされ、変位部材を有効に活用できていないという問題点があった。
これに対し、遊技機A1によれば、センサ装置の検出領域の少なくとも一部に重なる位置まで変位部材が変位可能に形成されるので、変位部材の変位によってセンサ装置の検出領域に影響を与えることができる。即ち、センサ装置と変位部材とを互いに関連を持つ関係とすることができ、これにより、変位部材の活用を図ることができる。
なお、センサ装置は、非接触式の物体検知センサであり、例えば、光学式のセンサ装置(可視光または不可視光からなる光を照射する照射手段と、その照射手段から照射され対象物(物体)により反射した光を受光する受光手段とを備え、受光した光を評価するもの)が例示される。受光した光の評価方法としては、受光手段(PSDやC−MOS)の結像位置を対象物の有無(距離)に換算する三角測距式や光が照射されてから受光するまでに要する時間を対象物の有無(距離)に換算するタイム・オブ・フライト式などが例示される。
遊技機A1において、前記センサ装置は、互いに所定間隔を隔てて配置される第1センサ及び第2センサを備え、前記変位部材は、前記第1センサの検出領域と前記第2センサの検出領域とを区画する位置に変位可能とされることを特徴とする遊技機A2。
遊技機A2によれば、遊技機A1の奏する効果に加え、第1センサの検出領域と第2センサの検出領域とを区画する位置に変位部材が変位可能とされるので、透明板の前面において、これら2つの領域を確実に切り離すことができる。これにより、例えば、これら2つの検出領域とのうちからいずれか一方の検出領域を遊技者に選択させる動作の検出精度を高めることができる。
一方、第1センサの検出領域と第2センサの検出領域とを区画する位置から変位部材を退避させることで、これらの2つの検出領域の変位部材による区画を解除することができる。これにより、例えば、第1センサの検出領域と第2センサの検出領域とに加え、第1センサ及び第2センサの両者に検出される検出領域を形成することができる。
遊技機A2において、前記変位部材は、前記第1センサの検出領域または第2センサの検出領域のうちの少なくとも一方に重なる領域を変位可能とされ、その変位部材の変位に伴い、前記第1センサの検出領域または第2センサの検出領域のうちの少なくとも一方の検出領域の大きさが変更されることを特徴とする遊技機A3。
遊技機A3によれば、遊技機A2の奏する効果に加え、変位部材が、第1センサの検出領域または第2センサの検出領域のうちの少なくとも一方に重なる領域を変位可能とされるので、その変位部材の変位に伴い、第1センサの検出領域または第2センサの検出領域のうちの少なくとも一方の検出領域の大きさを変更することができる。これにより、例えば、遊技者が自分の手や指を検出させる動作を行う場合に、遊技者に検出領域を探させることができる。
遊技機A1からA3のいずれかにおいて、前記センサ装置は、前記変位部材が所定位置に配置されたことを検出可能に形成されることを特徴とする遊技機A4。
遊技機A4によれば、センサ装置は、変位部材が所定位置に配置されたことを検出可能に形成される。即ち、透明板の前面側の物体を検出する手段と、変位部材の変位位置を検出する手段とをセンサ装置が兼用することができ、変位部材の変位位置を検出する手段を別途設ける必要がない。よって、遊技機A1からA3のいずれかの奏する効果に加え、部品コストの削減を図ることができる。
遊技機A1からA4のいずれかにおいて、発光可能に形成される発光手段を備え、その発光手段の発光が前記センサ装置へ入射されることを遮蔽可能な位置へ前記変位部材が変位可能とされることを特徴とする遊技機A5。
遊技機A5によれば、発光可能な発光手段を備えるので、その発光手段の発光による演出を行うことができる。この場合、発光手段の発光がセンサ装置へ入射されることを遮蔽可能な位置に変位部材を変位させることができるので、発光手段の発光がセンサ装置に受光されることを抑制できる。その結果、遊技機A1からA4のいずれかの奏する効果に加え、センサ装置の誤検出を抑制できる。また、発光手段の発光がセンサ装置へ入射されることを遮蔽するための部材を変位部材に兼用させることができるので、その分、部品コストの削減を図ることができる。更に、発光手段の発光が行われない際には、変位部材を遮蔽位置から退避させることができ、スペースを確保できるので、そのスペースを他の変位部材が変位するためのスペースとして利用することができる。
遊技機A5において、前記発光手段は、複数が異なる位置に配設され、前記変位部材は、前記複数の発光手段の発光状態に応じて、前記発光手段からの発光が前記センサ装置へ入射されることを遮蔽可能な位置へ前記変位部材が変位可能とされることを特徴とする遊技機A6。
遊技機A6によれば、発光手段は、複数が異なる位置に配設されるので、それら複数の発光手段のうちの発光させる発光手段を変化させる演出を行うことができる。この場合、複数の発光手段の発光状態に応じて、発光手段からの発光がセンサ装置へ入射されることを遮蔽可能な位置へ変位部材を変位させることができるので、発光手段の発光がセンサ装置に受光されることを抑制できる。その結果、遊技機A5の奏する効果に加え、センサ装置の誤検出を抑制できる。また、複数の発光手段のうちのいずれの発光手段の発光に対してもセンサ装置への入射を遮蔽可能な固定の部材を設ける場合には、かかる部材の配設に大きなスペースが必要となるところ、発光手段の発光が行われない際には、変位部材を遮蔽位置から退避させることで、より大きなスペースを確保できる。よって、そのスペースを他の変位部材が変位するためのスペースとして利用することができる。
遊技機A5又はA6において、前記遊技盤の背面側に変位可能に配設され前記遊技盤の開口を介して視認可能とされると共に前記発光手段が配設される第2変位部材を備え、前記変位部材は、前記第2変位部材の変位位置に応じて、前記発光手段からの発光が前記センサ装置へ入射されることを遮蔽可能な位置へ前記変位部材が変位可能とされることを特徴とする遊技機A7。
遊技機A7によれば、発光手段は、変位可能に形成される第2変位部材に配設されるので、第2変位部材の変位に伴い異なる位置で発光手段を発光させる演出を行うことができる。この場合、第2変位部材の変位位置に応じて、発光手段からの発光がセンサ装置へ入射されることを遮蔽可能な位置へ変位部材を変位させることができるので、発光手段の発光がセンサ装置に受光されることを抑制できる。その結果、遊技機A5又はA6の奏する効果に加え、センサ装置の誤検出を抑制できる。また、第2変位部材の可動範囲の全体範囲に対応して、発光手段の発光がセンサ装置へ入射されることを遮蔽可能な固定の部材を設ける場合には、かかる部材の配設に大きなスペースが必要となるところ、発光手段の発光が行われない際には、変位部材を遮蔽位置から退避させることで、より大きなスペースを確保できる。よって、そのスペースを他の変位部材が変位するためのスペースとして利用することができる。
遊技機A1からA7のいずかにおいて、前記センサ装置は、互いに所定間隔を隔てて対向配置される第1センサ及び第2センサを備え、前記第1センサまたは第2センサの一方から発光され前記透明板の汚れで反射した光を前記第1センサまたは第2センサの他方が受光可能に形成されることを特徴とする遊技機A8。
遊技機A8によれば、遊技機A1からA7のいずれかの奏する効果に加え、互いに所定間隔を隔てて対向配置される第1センサ及び第2センサをセンサ装置が備え、第1センサまたは第2センサの一方から発光され透明板で反射した光を第1センサまたは第2センサの他方が受光可能に形成されるので、第1センサおよび第2センサを遊技者から視認され難い位置に配設しつつ、透明板の汚れ(例えば、遊技者の手の脂など)の有無を検出可能とできる。
例えば、遊技盤の開口の縁部よりも幅方向の奥まった位置に1のセンサ装置を配設し、センサ装置からの発光を透明板に対して斜めに照射する構成では、正面視においてセンサ装置を遊技者から視認され難くできると共に、透明板の前面側に存在する物体(例えば、遊技者の手や指)を検出することはできる。しかし、センサ装置から発光された光の透明板に対する入射角が大きくため、透明板の汚れで反射した光をセンサ装置が受光することができない。
これに対し、遊技機A8によれば、例えば、第1センサおよび第2センサが、遊技盤の開口を挟んでそれぞれ開口の縁部よりも幅方向の奥まった位置に配設されることで、遊技者から視認され難くできる。この場合、第1センサまたは第2センサの一方から発光された光が透明板の汚れで反射する場合にはその反射した光を第1センサまたは第2センサの他方で受光し、透明板の汚れがない場合には、第1センサまたは第2センサの一方から発光された光は透明板を透過し、第1センサまたは第2センサの他方で受光しない。これにより、透明板の汚れの有無を検出できる。
なお、第1センサ及び第2センサによる透明板の汚れの有無の検出は、遊技機の電源投入時の処理において行うことが好ましい。遊技機の電源投入時は、遊技者が入店していないため、透明板の前面側における物体(遊技者の手や指)と透明板の汚れとの区別を行う必要がなく、透明板の汚れの有無の検出精度を高めることができるからである。
遊技機A1からA8のいずれかにおいて、前記変位部材は、前記センサ装置から発光された光が照射される面に、前記照射された光を吸収可能な吸収素材が配設されることを特徴とする遊技機A9。
遊技機A9によれば、遊技機A1からA8のいずれかにおいて、変位部材は、センサ装置から発光された光が照射される面に、その照射された光を吸収可能な吸収素材が配設されるので、変位部材で反射した光がセンサ装置によって受光されることを回避できる。これにより、センサ装置の受光した光が、透明板の前面側の物体で反射した光であるか、変位部材で反射した光であるかを区別することを不要とできるので、透明板の前面側の物体の検出精度の向上を図ることができると共に、判断処理を簡素化して、制御負担を抑制できる。
遊技機A1からA9のいずれかにおいて、前記変位部材は、前記センサ装置から発光された光が照射される部分が、前記照射された光を透過可能な素材から形成されることを特徴とする遊技機A10。
遊技機A10によれば、遊技機A1からA9のいずれかにおいて、変位部材は、センサ装置から発光された光が照射される部分が、その照射された光を透過可能な素材から形成されるので、変位部材で反射した光がセンサ装置によって受光されることを回避できる。これにより、センサ装置が受光した光が、透明板の前面側の物体で反射した光であるか、変位部材で反射した光であるかを区別することを不要とできるので、透明板の前面側の物体の検出精度の向上を図ることができると共に、判断処理を簡素化して、制御負担を抑制できる。
また、変位部材の上記部分が照射された光を透過可能な素材から形成されることで、センサ装置から発光された光を透過させて、その透過させた光を透明板の前面側の物体に照射できると共に、物体で反射した光を透過させて、その透過させた光をセンサ装置に受光させることができる。これにより、センサ装置の検出領域を確保しつつ、変位部材を変位させることができる。
遊技機A1からA10のいずれかにおいて、前記変位部材は、前記センサ装置から発光された光が照射される面に、前記照射された光を前記センサ装置と異なる方向へ反射させる反射面が形成されることを特徴とする遊技機A11。
遊技機A11によれば、遊技機A1からA10のいずれかにおいて、変位部材は、センサ装置から発光された光が照射される面に、その照射された光をセンサ装置と異なる方向へ反射させる反射面が形成されるので、変位部材で反射した光がセンサ装置によって受光されることを回避できる。これにより、センサ装置の受光した光が、透明板の前面側の物体で反射した光であるか、変位部材で反射した光であるかを区別することを不要とできるので、透明板の前面側の物体の検出精度の向上を図ることができると共に、判断処理を簡素化して、制御負担を抑制できる。
<中央遊動ユニット400を一例とする発明の概念について>
変位可能に形成される変位部材と、その変位部材に相対変位可能に配設される第1部材と、前記変位部材に駆動力を付与する駆動手段とを備えた遊技機において、前記変位部材は、互いに独立して変位可能な一対のアーム部材を備え、それら一対のアーム部材の一端に前記第1部材が相対変位可能に連結されることを特徴とする遊技機B1。
ここで、変位可能な変位部材を設け、その変位部材の変位により演出を行うものが知られている。また、変位部材の前面に第1部材を更に設け、その第1部材を回転させることで演出効果を高めるものもある(例えば、特開2012−105873号公報)。しかしながら、上述したものでは、変位部材と第1部材とが一体的に変位しつつ、第1部材が回転する形態であり、第1部材の動きの変化に乏しいという問題点があった。
これに対し、遊技機B1によれば、変位部材が互いに独立して変位可能な一対のアーム部材を備え、それら一対のアーム部材の一端第1部材が連結されるので、一対のアーム部材を互いに独立して変位させることで、両アーム部材の変位と第1部材の変位とを異ならせることができ、その結果、第1部材の動きに変化を与えることができる。
また、変位部材は、アーム部材に対して相対変位可能に連結されるので、アーム部材の変位と第1部材の変位とを独立させることができる。即ち、例えば、アーム部材の変位時に、そのアーム部材に対して変位部材を相対変位させ、両者を独立した変位で変位させる、或いは、アーム部材の変位の停止時に、第1部材の変位を継続させることを行うことができ、その結果、第1部材の動きに変化を与えることができる。
なお、アーム部材の変位の形態としては、例えば、他端側を中心として回転する形態、他端側がスライド変位する形態、これらを組み合わせた形態(アーム部材の一方が回転を、他方がスライド変位を、それぞれ採用する形態)などが例示される。
また、アーム部材の一端と第1部材とが相対変位可能に連結される形態としては、例えば、アーム部材または第1部材の一方に配設された軸が他方に配設された軸孔に軸支され軸が軸孔に対して軸回転することで相対変位可能とする形態、アーム部材または第1部材の一方に配設されたピンが他方に配設された摺動溝に沿って摺動することで相対変位可能とする形態、アーム部材および第1部材が弾性部材を介して連結され弾性部材が弾性変形することで相対変位可能とする形態、アーム部材または第1部材の一方に配設された球状のボールが他方に配設されボールに球面接触するスタッドに対して任意方向に回転することで相対変位可能とする形態、アーム部材および第1部材が1又は複数のリンク機構(変形しない節が可動部分である関節により接続された機構)を介して連結されリンク機構が変形することで相対変位可能とする形態、これらの各形態を組み合わせた形態などが例示される。
遊技機B1において、前記一対のアーム部材は、前記第1部材が相対変位可能に配設される一端と反対側の他端が回転可能に軸支され、前記駆動手段から付与される駆動力により前記他端を中心として回転されることを特徴とする遊技機B2。
遊技機B2によれば、遊技機B1の奏する効果に加え、一対のアーム部材は、第1部材が相対変位可能に配設される一端と反対側の他端が回転可能に軸支され、駆動手段から付与される駆動力により他端を中心として回転されるので、一対のアーム部材のそれぞれの一端を、中心位置が互いに異なる円弧状の軌跡に沿って移動させることができる。その結果、一対のアーム部材をそれぞれ変位(回転)させることで、第1部材に直線運動と回転運動とを組み合わせた動きを付与することができ、その動きに変化を与えることができる。
なお、一対のアーム部材は、一端から他端までの距離が互いに同一の長さに設定されていても良く、或いは、異なる長さに設定されていても良い。
遊技機B1又はB2において、前記アーム部材または第1部材の一方には摺動溝が配設されると共に、前記アーム部材または第1部材の他方には前記摺動溝に沿って摺動可能に形成されるピン部が配設され、前記摺動溝は、少なくとも前記アーム部材が基準位置に配置された状態において、前記摺動溝の一方の端部または他方の端部と前記ピン部との間に隙間が形成されることを特徴とする遊技機B3。
遊技機B3によれば、遊技機B1又はB2の奏する効果に加え、アーム部材および第1部材が摺動溝とピン部とを介して連結され、摺動溝は、少なくともアーム部材が基準位置に配置された状態において、摺動溝の一方の端部または他方の端部とピン部との間に隙間が形成されるので、アーム部材が停止されていても、隙間の分、第1部材がアーム部材に対して相対変位することを許容することができる。これにより、第1部材の動きに変化を与えることができる。
例えば、アーム部材を所定速度で変位させた後に基準位置で停止させると、その停止に伴い発生する慣性力を第1部材に作用させることで、ピン部が摺動溝の一端および他端へ向けて往復動する変位を形成することができる。その結果、アーム部材の変位を停止させた後において、第1部材を往復動させる(揺らす)ことができる。
遊技機B3において、前記摺動溝は、前記第1部材に形成されると共に、一対の直線状の溝が非平行に配置されることを特徴とする遊技機B4。
遊技機B4によれば、遊技機B3の奏する効果に加え、摺動溝は、第1部材に形成されると共に、一対の直線状の溝が非平行に配置されるので、アーム部材の変位が基準位置で停止された後に、摺動溝の一方の端部または他方の端部とピン部との間の隙間の分、第1部材がアーム部材に対して相対変位される際には、その相対変位に回転成分を付与することができる。これにより、第1部材の動きに変化を与えることができる。
また、摺動溝が直線状に形成されることで、ピン部を摺動溝に沿ってスムーズに摺動させることができるので、アーム部材の変位に伴う第1部材の相対変位を安定化することができると共に、駆動手段の負荷を抑制できる。
遊技機B4において、前記摺動溝が略ハの字状に配置されることを特徴とする遊技機B5。
遊技機B5によれば、遊技機B4の奏する効果に加え、摺動溝が略ハの字状に配置されるので、第1部材の往復動が収束して停止した後は、その停止状態に第1部材を維持することができる。よって、例えば、退避位置に退避された第1部材が外乱によりがたつくことを抑制できる。その結果、摺動溝や連結ピンの摩耗を抑制できる。
遊技機B3において、前記一対のアーム部材は、前記第1部材が相対変位可能に配設される一端と反対側の他端が回転可能に軸支され、前記駆動手段から付与される駆動力により前記他端を中心として回転され、前記摺動溝は、直線状に形成されると共に前記アーム部材の一端に配設され、前記ピン部が前記第1部材に配設されることを特徴とする遊技機B6。
遊技機B6によれば、遊技機B3の奏する効果に加え、一対のアーム部材は、第1部材が相対変位可能に配設される一端と反対側の他端が回転可能に軸支され、駆動手段から付与される駆動力により他端を中心として回転されるので、一対のアーム部材のそれぞれの一端を、中心位置が互いに異なる円弧状の軌跡に沿って移動させることができる。その結果、一対のアーム部材をそれぞれ変位(回転)させることで、第1部材に直線運動と回転運動とを組み合わせた動きを付与することができ、その動きに変化を与えることができる。
この場合、摺動溝が直線状に形成されると共にアーム部材の一端に配設され、ピン部が第1部材に配設されるので、アーム部材の回転角度に応じて摺動溝の向き(傾斜方向)を変化させることができる。例えば、摺動溝を略ハの字状に配置することや一直線状に配置することができる。これにより、例えば、アーム部材の変位が停止され、慣性力の作用により第1部材が往復動される際に、摺動溝が略ハの字状に配置される場合には、第1部材の動きに回転成分を付与可能としつつ、その往復動をハの字の中央へ向けて速やかに収束させることができ、また、摺動溝が一直線状に配置される場合には、第1部材の動きを直線成分のみとすることができる。
また、摺動溝が直線状に形成されることで、ピン部を摺動溝に沿ってスムーズに摺動させることができるので、アーム部材の変位に伴う第1部材の相対変位を安定化することができると共に、駆動手段の負荷を抑制できる。
遊技機B3からB6のいずれかにおいて、前記摺動溝の一方の端部または他方の端部と前記ピン部との間に形成される隙間は、重力の作用により前記第1部材の移動を許容する方向に配置されることを特徴とする遊技機B7。
遊技機B7によれば、遊技機B3からB6のいずれかにおいて、摺動溝の一方の端部または他方の端部とピン部との間に形成される隙間は、重力の作用により第1部材の移動を許容する方向に配置されるので、第1部材の動きとして、アーム部材の変位に従動される動きに加え、アーム部材の変位に従動せず重力の作用により自由落下する動きも形成できる。これにより、第1部材の動きに変化を与えることができる。
遊技機B3からB7のいずれかにおいて、前記第1部材は、前記アーム部材の一端が連結される本体部と、その本体部に変位可能に配設される被駆動部と、その被駆動部に駆動力を付与する第2駆動手段とを備えることを特徴とする遊技機B8。
遊技機B8によれば、遊技機B3からB7のいずれかにおいて、第1部材は、アーム部材の一端が連結される本体部と、その本体部に変位可能に配設される被駆動部と、その被駆動部に駆動力を付与する第2駆動手段とを備えるので、第2駆動手段の駆動力により被駆動部を本体部に対して相対変位させる演出を行うことができる。この場合、本体部には、被駆動部の変位に伴う反力が作用されるので、その反力によりピン部を摺動溝の一端および他端へ向けて往復動させる変位を形成することができる。その結果、アーム部材の変位が停止された状態において、本体部(第1部材)を変位(例えば、往復動)させることができる。
遊技機B8において、前記被駆動部は、前記本体部に回転可能に軸支され、前記第2駆動手段から付与される駆動力により回転されることを特徴とする遊技機B9。
遊技機B9によれば、遊技機B8の奏する効果に加え、被駆動部は、前記本体部に回転可能に軸支され、前記第2駆動手段から付与される駆動力により回転されるので、アーム部材の変位が停止された状態において、駆動部の回転に伴う反力を本体部に作用させて本体部を変位させる際には、本体部の動きに回転の成分を発生させやすくできる。
被駆動部の形状としては、例えば、円形、多角形、長尺形状などが例示される。この場合、被駆動部は、その重心位置が回転中心(本体部に軸支される位置)から偏心されていても良い。これにより、駆動部の回転に伴う反力を大きくできると共に回転角に対する反力の変動を大きくして、本体部の動きに変化を与えることができる。
遊技機B9において、前記被駆動部の回転中心が前記一対のピン部の間に位置されることを特徴とする遊技機B10。
遊技機B10によれば、遊技機B9の奏する効果に加え、被駆動部の回転中心が前記一対のピン部の間に位置されるので、駆動部の回転に伴う反力を本体部の回転の動きに繋げやすくできる。
遊技機B1からB10のいずれかにおいて、変位可能に形成される第2変位部材を備え、その第2変位部材が第1部材に当接可能に形成されることを特徴とする遊技機B11。
遊技機B11によれば、遊技機B1からB10の奏する効果に加え、変位可能に形成される第2変位部材を備え、その第2変位部材が第1部材に当接可能に形成されるので、かかる当接により、第1部材の動きを規制することと、第1部材の動きに変化を与えることとの両者を達成することができる。例えば、アーム部材を基準位置で停止させる際に、第2変位部材を第1部材に当接させることで、アーム部材の停止に伴い発生する慣性力で第1部材が変位(往復動)されることを抑制できる。一方、例えば、アーム部材および第1部材が停止されている状態で、第2変位部材を第1部材に衝突させ、第1部材を跳ね飛ばすことで、アーム部材に対して第1部材を相対変位させる態様や、第2変位部材と一体となった状態で第1部材を変位させる態様を形成することができる。
更に、第1部材が本体部と被駆動部とを備える場合には、第2変位部材を本体部に当接させておくことで、本体部は停止状態に維持しつつ被駆動部のみを変位させることができる。即ち、被駆動部の変位に伴う反力で本体部を被駆動部と共に変位させる態様と、被駆動部のみを変位させる態様とを形成することができる。
遊技機B1からB11のいずれかにおいて、変位可能に形成される第2変位部材を備え、前記第1部材または第2変位部材の一方には磁石が配設されると共に、前記第1部材または第2変位部材の他方には磁石または鉄製部材が配設され、前記第2変位部材が所定位置まで変位された場合には、前記一方の磁石と他方の磁石または鉄製部材との間で磁力が作用されることを特徴とする遊技機B12。
遊技機B12によれば、遊技機B1からB11のいずれかの奏する効果に加え、変位可能に形成される第2変位部材を備え、第1部材または第2変位部材の一方には配設された磁石と、第1部材または第2変位部材の他方に配設された磁石または鉄製部材との間で磁力が作用されるので、かかる磁力の作用により、第1部材の動きを規制する、或いは、第1部材を変位させることができる。例えば、アーム部材を基準位置で停止させた後に、第2変位部材を第1部材に近接離間させることで、磁力の作用により、第1部材を変位(往復動)させることができる。なお、磁力の作用により第1部材の変位を規制できるので、第1部材と第2変位部材とを当接させる必要がなく、両者を非接触とできるので、損傷を抑制できる。
<第1回転体340a及び第2回転体340bを一例とする発明の概念について>
C1.駆動手段と、その駆動手段の駆動力を伝達する伝達手段と、その伝達手段から伝達される駆動力により回転されると共に外周面に複数の図形が描かれた第1回転体および第2回転体とを少なくとも備え、第1回転体の図形と第2回転体の図形とを遊技者に視認させる遊技機において、前記伝達手段は、第1回転体の回転状態と第2回転体の回転状態とが異なるように前記駆動手段の駆動力を前記第1回転体および第2回転体へ伝達可能に形成されることを特徴とする遊技機C1。
ここで、外周面に複数の図形が描かれた第1回転体および第2回転体を備え、それら第1回転体と第2回転体を回転させて、第1回転体の外周面に描かれた図形と第2回転体の外周面に描かれた図形とをそれぞれ遊技者に視認させる遊技機が知られている(特開2013−220215号公報)。この場合、第1回転体は第1の駆動モータ(駆動手段)により、第2回転体は第2の駆動モータにより、それぞれ独立して回転駆動され、遊技者が視認する第1回転体の図形と第2回転体の図形との組み合わせが変更可能とされる。しかしながら、上述した従来の遊技機では、回転体と同じ数の駆動モータが必要となるため、その分、コストが嵩むという問題点があった。
これに対し、遊技機C1によれば、伝達手段が、第1回転体の回転状態と第2回転体の回転状態とが異なるように駆動手段の駆動力を第1回転体および第2回転体へ伝達可能に形成されるので、1の駆動手段であっても、遊技者が視認する第1回転体の図形と第2回転体の図形との組み合わせを変更できる。即ち、駆動手段の必要数を低減して、その分、コストを削減できる。
なお、一方の回転体と他方の回転体との異なる回転状態としては、例えば、一方の回転体と他方の回転体との回転速度が異なる状態、及び、一方の回転体が回転されると共に他方の回転体が停止される状態が例示される。回転速度は、一定である必要はなく、増減しても良い。
また、各回転体の外周面に描かれる複数の図形としては、例えば、文字や図柄、色彩、模様、或いは、これらの組み合わせが例示される。この場合、図形は、文字や図柄の一部(他の図形と組み合わさって1の文字や図柄を形成するもの)であっても良く、全部(その図形のみで1の文字や図柄を形成するもの)であっても良い。
遊技機C1において、前記伝達手段は、駆動手段の回転を、前記第1回転体および第2回転体へそれぞれ異なる回転比で伝達することを特徴とする遊技機C2。
遊技機C2によれば、遊技機C1の奏する効果に加え、伝達手段は、駆動手段の回転を、第1回転体および第2回転体へそれぞれ異なる回転比で伝達するので、第1回転体の回転周期と第2回転体の回転周期とを異ならせることができる。よって、1の駆動手段であっても、遊技者が視認する第1回転体の図形と第2回転体の図形との組み合わせを変更できる。
また、伝達手段は、駆動手段から第1回転体および第2回転体へ伝達する回転の回転比を異ならせる構成なので、かかる伝達手段の構造の簡素化を図ることができる。
なお、伝達手段としては、例えば、噛み合いで回転を伝える機構(歯車伝達機構やチェーン伝達機構)や摩擦で回転を伝える機構(摩擦伝達機構やベルト伝達機構)が例示される。歯車伝達機構としては、平歯車、ウォームとウォーム歯車、かさ歯車、或いは、ラックとピニオンが、チェーン伝達機構としては、チェーン及びスプロケットが、摩擦伝達機構としては、摩擦歯車が、ベルト伝達機構としては、プーリとベルトが、それぞれ例示される。
この場合、第1回転体の回転軸と駆動手段の駆動軸との間、及び、第2回転体の回転軸と駆動手段の駆動軸との間のそれぞれに、上述した噛み合いで回転を伝える機構または摩擦で回転を伝える機構が配設されるものであっても良く、第1回転体および第2回転体の一方は、その回転軸が駆動手段の駆動軸に直結され、第1回転体および第2回転体の他方の回転軸と駆動手段の駆動軸との間に、上述した噛み合いで回転を伝える機構または摩擦で回転を伝える機構が配設されるものであっても良い。後者の場合には、回転を伝える機構を構成するための部品(歯車など)の数を抑制して、その分、コストの低減を図ることができる。
遊技機C2において、前記第1回転体および第2回転体は、その外周面に描かれた図形を遊技者に視認可能とする視認位置において、一方の位相に対して他方の位相がずれた状態で停止されることを特徴とする遊技機C3。
遊技機C3によれば、遊技機C2の奏する効果に加え、現出させることのできる図形の組み合わせの数を増加させることができると共に、所望の図形の組み合わせを現出させるために必要とされる回転数を抑制して短時間で現出させることができる。
即ち、外周面に描かれた図形を遊技者に視認させる視認位置に第1回転体および第2回転体を停止させる際に、それら両回転体の両者の位相が一致することを要求すると、組み合わせ可能な図形の数が少なくなると共に、所望の図形の組み合わせを現出させるために必要とされる回転数が多くなる(テーブルが長くなる)。これに対し、遊技機C3によれば、第1回転体および第2回転体が視認位置に停止される際には、両回転体の一方の位相に対して他方の位相をずれた状態とするので、現出させることのできる図形の組み合わせの数を増加させることができると共に、所望の図形の組み合わせを現出させるために必要とされる回転数を抑制して短時間で現出させることができる。
この場合、第1回転体および第2回転体は、その外周面の少なくとも一部または全部が、回転軸に直交する断面視において、外方へ凸となる円弧状に湾曲して形状されることが好ましい。これにより、視認位置に停止された第1回転体および第2回転体の間に位相のずれがある場合でも、その位相のずれを遊技者に認識させ難くできるからである。
遊技機C1において、前記伝達手段は、前記駆動手段の回転を前記第1回転体へ伝達する第1伝達手段と、前記駆動手段の回転を前記第2回転体へ伝達する第2伝達手段とを備え、前記第1伝達手段または第2伝達手段の少なくとも一方は、互いに歯合可能とされる2の歯車を少なくとも備え、それら2の歯車のうちの一方の歯車は、他方の歯車と歯合して回転を伝達する歯合領域と前記他方の歯車との歯合を非歯合として回転の伝達を遮断する非歯合領域とを備えることを特徴とする遊技機C4。
遊技機C4によれば、遊技機C1の奏する効果に加え、駆動手段の回転を第1回転体へ伝達する第1伝達手段、及び、駆動手段の回転を第2回転体へ伝達する第2伝達手段の少なくとも一方は、互いに歯合可能とされる2の歯車を少なくとも備え、それら2の歯車のうちの一方の歯車は、他方の歯車と歯合して回転を伝達する歯合領域と他方の歯車との歯合を非歯合として回転の伝達を遮断する非歯合領域とを備えるので、第1回転体および第2回転体の一方を停止させつつ他方を回転させる状態と、第1回転体および第2回転体の両者を回転させる状態と、を形成することができる。よって、1の駆動手段であっても、遊技者が視認する第1回転体の図形と第2回転体の図形との組み合わせを変更できる。
また、このように、伝達手段は、第1回転体および第2回転体の他方を回転させつつ、一方の回転を停止させると共にその停止を解除して回転を再開させることができるので、第1回転体の図形と第2回転体の図形との組み合わせを視認する遊技者の期待感を高めることができる。
なお、第1伝達手段または第2伝達手段の両者が、互いに歯合可能とされる2の歯車を少なくとも備えると共に、それら2の歯車のうちの一方の歯車が、歯合領域と非歯合領域とを備えるものであっても良い。これにより、第1回転体および第2回転体の両者が回転する状態、両者が停止する状態、一方が停止し他方が回転する状態、一方が回転し他方が停止する状態を形成することができる。
遊技機C4において、前記第1伝達手段または第2伝達手段の一方のみが前記歯合領域および非歯合領域を有する歯車を備え、前記非歯合領域の形成範囲は、前記第1回転体または第2回転体の他方の外周面に複数描かれた図形の間隔に対応して設定されることを特徴とする遊技機C5。
遊技機C5によれば、遊技機C4の奏する効果に加え、第1伝達手段または第2伝達手段の一方のみが歯合領域および非歯合領域を有する歯車を備えるので、駆動手段が駆動されている状態では、第1回転体または第2回転体の一方は、回転と停止とが切り替えられ、他方は回転が維持される。この場合、非歯合領域の形成範囲は、第1回転体または第2回転体の他方の外周面に複数描かれた図形の間隔に対応して設定されるので、第1回転体の図形と第2回転体の図形との組み合わせを要素とするテーブルの長さを短くすることができる。よって、所望の図形の組み合わせを現出させるのに要する第1回転体および第2回転体の回転数を抑制できる。即ち、所望の図形の組み合わせを現出させるのに必要な時間を短縮できる。
なお、非歯合領域の形成範囲が、他方の外周面に複数描かれた図形の間隔に対応して設定されるとは、第1回転体または第2回転体の一方が非歯合領域により停止されている間に、他方がn個分(nは1を含む整数)の図形の間隔に対応する回転角だけ回転されることを意味する。特に、n=1に設定されることが好ましい。上述したテーブルの長さを最短して、所望の図形の組み合わせを現出させるのに必要な回転数を最少とできるからである。
遊技機C2からC5のいずれかにおいて、前記伝達手段は、前記駆動手段の正方向への回転を前記第1回転体および第2回転体へ伝達する正方向伝達手段と、前記駆動手段の正方向とは反対の逆方向への回転を前記第1回転体および第2回転体へ伝達する逆方向伝達手段と、前記駆動手段が正方向へ回転された場合にはその駆動手段の回転の前記正方向伝達手段への伝達を許容すると共に前記逆方向伝達手段への伝達を遮断し且つ前記駆動手段が逆方向へ回転された場合にはその駆動手段の回転の前記正方向伝達手段への伝達を遮断すると共に前記逆方向伝達手段への伝達を許容する切換手段とを備えることを特徴とする遊技機C6。
遊技機C6によれば、遊技機C2からC5のいずれかの奏する効果において、駆動手段が正方向へ回転された場合には、切換手段によって、駆動手段の回転の正方向伝達手段への伝達が許容されると共に逆方向伝達手段への伝達を遮断され、且つ、駆動手段が逆方向へ回転された場合には、切換手段によって、駆動手段の回転の正方向伝達手段への伝達が遮断されると共に逆方向伝達手段への伝達が許容されるので、駆動手段が正方向へ回転される場合と逆方向へ回転される場合とで、遊技者が視認する第1回転体の図形と第2回転体の図形との組み合わせの種類を異ならせることができる。即ち、第1回転体の図形と第2回転体の図形との組み合わせを要素とするテーブルを2種類とし、駆動手段の回転方向に変更することで、かかる2種類のテーブルを任意に選択可能とすることができる。
なお、正方向伝達手段および逆方向伝達手段としては、遊技機C2又はC3で説明した第1の構造(第1回転体と第2回転体との回転比を異ならせる構造)、遊技機C4又はC5で説明した第2の構造(非歯合領域により第1回転体または第2回転体の一方を停止させる構造)、及び、第1回転体および第2回転体を同速度で同期回転させる第3の構造のうちから任意に選択することができる。
例えば、正方向伝達手段として第1の構造を、逆方向伝達手段として第2の構造を、それぞれ選択する場合が例示される。また、正方向伝達手段および逆方向伝達手段に同じ構造を選択しても良い。例えば、正方向伝達手段および逆方向伝達手段として、第1の構造を選択する場合、或いは、第2の構造を選択する場合がそれぞれ例示される。前者の場合には、正方向伝達手段と逆方向伝達手段とで回転比を異なるものとし、後者の場合には、正方向伝達手段と逆方向伝達手段とで歯合領域と非歯合領域との形成割合を異なるものとする。これによっても、第1回転体の図形と第2回転体の図形との組み合わせを要素とするテーブルを2種類とし、駆動手段の回転方向に変更することで、かかる2種類のテーブルを任意に選択可能とすることができる。
また、駆動手段が正方向へ回転される際の第1回転体および第2回転体の回転方向と、駆動手段が逆方向へ回転される際の第1回転体および第2回転体の回転方向とは、同方向であっても良く、逆方向であっても良い。但し、同方向とすることが好ましい。駆動手段の回転方向に変更して、テーブルが変更されたことを遊技者に意識させ難くできるからである。
遊技機C1からC6のいずれかにおいて、前記第1回転体および第2回転体の少なくとも一方の内部に配設される発光手段を備えると共に、第1回転体および第2回転体の少なくとも一方の外周面の少なくとも一部が光透過性の材料から形成されることを特徴とする遊技機C7。
遊技機C7によれば、遊技機C1からC6のいずれかにおいて、第1回転体および第2回転体の少なくとも一方の外周面の少なくとも一部が光透過性の材料から形成されるので、第1回転体および第2回転体の少なくとも一方の内部に配設される発光手段の発光を遊技者に視認させることができる。
なお、発光手段の発光は、常時発光させても良く、所定条件下で発光させても良い。所定条件としては、例えば、第1回転体の図形と第2回転体の図形とが特定の組み合わせを形成した場合、第1回転体または第2回転体の一方が停止している場合、その停止が実行される前または停止後に回転を再開する場合、などが例示される。
遊技機C7において、前面が開放した箱状に形成されると共に前記第1回転体および第2回転体が収容され前記前面の開放部分を介して前記第1回転体および第2回転体の外周面に描かれた図形を遊技者に視認させる収容体を備えることを特徴とする遊技機C8。
遊技機C8によれば、遊技機C7の奏する効果に加え、前面が開放した箱状に形成されると共に第1回転体および第2回転体が収容され前面の開放部分を介して前記第1回転体および第2回転体の外周面に描かれた図形を遊技者に視認させる収容体を備えるので、かかる収容体を利用して発光手段の発光を遊技者に視認させることができる。即ち、発光手段の発光を直接視認させる場合と異なる態様で遊技者に視認させることができる。例えば、発光手段から発光された光を収容体の内壁面で反射させて遊技者に視認させる態様、発光手段から発光され収容体の壁部を透過して所定の対象物に照射された光を所定の対象物と共に遊技者に視認させる態様、発光手段から発光された光を収容体の壁部内に入射させて収容体の所定部位(例えば、前面の端面)を発光させる形態、などが例示される。
なお、上記各態様は、例えば、第1回転体または第2回転体の少なくとも一方に描かれた複数の図形のうちの特定の図形が第1回転体または第2回転体の背面側(即ち、遊技者から視認不能な位置)に配置された際に実行されることが好ましい。遊技者から視認不能な位置に配置された特定の図形を、発光手段の発光に伴って、遊技者に連想させる(特定の図形が視認可能となるように第1回転体または第2回転体が回転されることを期待させる)ことができるからである。特に、かかる発光手段の発光は、第1回転体または第2回転体の少なくとも一方が停止されている状態において実行されることが好ましい。
遊技機C1からC8において、前記第1回転体および第2回転体が収容される収容体と、その収容体を前記第1回転体および第2回転体が遊技者から視認可能な演出位置と遊技者から視認不能な退避位置との間で移動させる移動手段とを備えることを特徴とする遊技機C9。
遊技機C9によれば、遊技機C1からC8のいずれかの奏する効果に加え、第1回転体および第2回転体が収容される収容体を、第1回転体および第2回転体が遊技者から視認可能な演出位置と遊技者から視認不能な退避位置との間で移動させる移動手段を備えるので、第1回転体の図形と第2回転体の図形との組み合わせのうちの所望の組み合わせを必要なタイミングで速やかに現出させることができる。
即ち、本発明では、所望の組み合わせを現出させるために第1回転体および第2回転体を比較的多く回転させる必要があり、時間が嵩むところ、移動手段により第1回転体および第2回転体を遊技者から視認不能な退避位置に移動させることができるので、かかる退避位置において事前に第1回転体および第2回転体を所定の回転位置まで回転させておくことができ、これにより、必要なタイミングが到来した際には、移動手段により第1回転体および第2回転体を演出位置に移動させると共に、所望の組み合わせを速やかに現出させることができる。
遊技機C9において、所定の動作を実行する動作手段を備え、前記第1回転体および第2回転体の回転が、前記退避位置に配置され且つ前記動作手段が動作される場合に行われることを特徴とする遊技機C10。
遊技機C10によれば、遊技機C9の奏する効果に加え、第1回転体および第2回転体の回転が、退避位置に配置され且つ動作手段が動作される場合に行われるので、第1回転体および第2回転体を退避位置において事前に回転させておく場合に、その回転が遊技者に認識されることを抑制できる。
即ち、第1回転体および第2回転体を回転させる際には、比較的大きな音が発生するため、退避位置に移動されて、遊技者から視認不能とされたとしても、第1回転体および第2回転体の回転により発生する音によってその回転が遊技者に認識されるおそれがある。これに対し、遊技機C10によれば、第1回転体および第2回転体の回転を、動作手段の動作に紛れ込ませて行うことができるので、かかる回転を遊技者に認識させ難くすることができる。
なお、動作手段としては、例えば、払出装置や音声発生装置などが例示される。即ち、払出装置により遊技媒体の払い出しが行われている状態では、その遊技媒体の払い出し動作に伴い、比較的大きな音が発生する。よって、遊技者に第1回転体等の回転を認識させ難くできる。音声発生装置から音声が発生されている状態も同様である。また、これに代えて、或いは、これに加えて、表示装置において所定の表示が行われている場合に、第1回転体および第2回転体の回転を行うようにしても良い。表示装置で行われている所定の表示に遊技者の意識が集中しているため、第1回転体等の回転を遊技者に認識させ難くできる。
<LED344を一例とする発明の概念について>
外周面に複数の図形が描かれると共に外周面を形成する外壁の少なくとも一部が光透過性の材料から形成される回転体と、その回転体の内部に配設される発光手段と、前記回転体が回転可能に収容され前面の開放部分を介して前記回転体の外周面に描かれた図形を遊技者に視認させる収容体とを備える遊技機において、前記発光手段から発光され前記回転体の外壁から透過された光が、前記収容体で反射して遊技者に視認されることを特徴とする遊技機D1。
ここで、外周面に複数の図形が描かれると共に外周面を形成する外壁の一部が光透過性の材料から形成される回転体と、その回転体の内部に配設される発光手段と、回転体が回転可能に収容される収容体とを備え、回転体の外周面に描かれた図形を収容体の前面の開放部分から遊技者に視認させる遊技機が知られている(特開2013−220215号公報)。しかしながら、上述した従来の遊技機では、発光手段の光は、収容体の前面の開放部分から視認される回転体の外壁を透過して、遊技者に直接的に視認されるのみであり、その光の演出効果が有効に発揮されていないという問題点があった。
これに対し、遊技機D1によれば、発光手段から発光され回転体の外壁から透過された光が、収容体で反射して遊技者に視認されるので、回転体の外壁を透過した光を直接的に視認する場合とは異なる態様で光を遊技者に視認させることができ、その結果、光の演出効果を有効に発揮させることができる。
遊技機D1において、前記回転体の外壁には、光透過性の材料から形成され前記発光手段から発光された光を前記回転体の外部に透過させる透過部と、光を反射可能な材料から形成され前記発光手段から発光された光を前記回転体の内部へ反射させる反射部とが形成され、前記回転体の回転時に前記透過部および反射部が前記発光手段から発光された光の照射領域を通過可能とされることを特徴とする遊技機D2。
遊技機D2によれば、遊技機D1の奏する効果に加え、回転体の外壁には、発光手段から発光された光を回転体の外部に透過させる透過部と、発光手段から発光された光を回転体の内部へ反射させる反射部とが形成され、回転体の回転時に透過部および反射部が発光手段から発光された光の照射領域を通過可能とされるので、発光手段から発光された光を透過部から外部へ直接透過させる態様と、発光手段から発光された光を反射部で反射させた後に透過部から外部へ透過させる形態とを形成することができると共に、それら各形態を回転体の回転に伴って切り替えることができる。即ち、1の発光手段のみで2つの発光形態を形成でき、例えば、発光手段の照射方向を可動とする構造を採用しなくても、遊技者から視認される光の位置を少なくとも2箇所に切り替えることができる。その結果、部品点数の削減と構造の簡素化とを図りつつ、光の演出効果を有効に発揮させることができる。
遊技機D2において、前記発光手段は、前記収容体の前記前面の開放部分へ向けて光を照射する姿勢で配設されることを特徴とする遊技機D3。
遊技機D3によれば、遊技機D2の奏する効果に加え、発光手段は、収容体の前面の開放部分へ向けて光を照射する姿勢で配設されるので、発光手段から発光された光を透過部から外部へ直接透過させる態様では、その光を、収容体の前面の開放部分に位置する回転体の外周面から遊技者に視認させることができる一方、発光手段から発光された光を反射部で反射させた後に透過部から外部へ透過させる形態では、収容体の前面の開放部分に位置する回転体の外周面からは光の視認を不能として、収容体の内壁面から反射した光を回転体の周囲において遊技者に視認させることができる。これにより、回転体の回転に伴い、光が視認される位置を切り替えることができると共に、その視認される位置を大きく相違させることができ、その結果、光の演出効果を有効に発揮させることができる。
遊技機D1からD3のいずれかにおいて、前記回転体は、断面略多角形の略角柱状体として形成されることを特徴とする遊技機D4。
遊技機D4によれば、遊技機D1からD3のいずれかの奏する効果に加え、回転体が断面多角形の角柱状体として形成されるので、回転体の回転に伴って、回転体の見かけの直径を変化(増減)させることができる。よって、発光手段から発光された光を反射部で反射させた後に透過部から外部へ透過させ、収容体の内壁面から反射した光を回転体の周囲において遊技者に視認させる場合に、光を視認される領域の大きさを回転体の回転に伴って増減させることができ、その結果、光の演出効果を有効に発揮させることができる。
遊技機D4において、前記回転体は、第1回転体と、その第1回転体に略平行に並設される第2回転体とを備え、それら第1回転体および第2回転体は、それぞれ断面略三角形の略三角柱状体として形成されることを特徴とする遊技機D5。
遊技機D5によれば、遊技機D4の奏する効果に加え、回転体は、第1回転体と、その第1回転体に略平行に並設される第2回転体とを備え、それら第1回転体および第2回転体がそれぞれ断面三角形の三角柱状体として形成されるので、第1回転体および第2回転体の回転に伴って、第1回転体および第2回転体の間の隙間(対向間隔)を変化させることができる。よって、発光手段から発光された光を反射部で反射させた後に透過部から外部へ透過させ、収容体の内壁面から反射した光を、第1回転体および第2回転体の間の隙間から遊技者に視認させる場合に、光を視認される領域の大きさを回転体の回転に伴って増減させることができ、その結果、光の演出効果を有効に発揮させることができる。
遊技機D5において、前記第1回転体または第2回転体のうちの少なくとも一方は、前記断面略三角形の外面のうちの一の外面を形成する外壁の内面に前記反射部が配設されると共に残りの二の外面を形成する各外壁に前記透過部がそれぞれ配設されることを特徴とする遊技機D6。
遊技機D6によれば、遊技機D5の奏する効果に加え、第1回転体または第2回転体のうちの少なくとも一方は、断面略三角形の外面のうちの一の外面を形成する外壁の内面に反射部が配設されると共に残りの二の外面を形成する各外壁に透過部がそれぞれ配設されるので、発光手段から発光された光を反射部で反射させた後に透過部から外部へ透過させる場合には、2箇所の外面(透過部)から光を外部へ透過させることができる。よって、
収容体の内壁面の異なる2箇所で光を反射させて遊技者に視認させることができる、或いは、一方の透過部から透過した光は遊技者に直接視認させつつ他方の透過部から透過した光を収容体の内壁面で反射させて遊技者に視認させることができ、その結果、光の演出効果を有効に発揮させることができる。
遊技機D6において、前記収容体は、前面が開放した箱状体に形成され、前記箱状体の背面側の内壁面には、光を反射可能な材料から形成される反射部が前記第1回転体および第2回転体の外形を越える範囲に配設されることを特徴とする遊技機D7。
遊技機D7によれば、遊技機D6の奏する効果に加え、収容体は、前面が開放した箱状体に形成され、箱状体の背面側の内壁面には、光を反射可能な材料から形成される反射部が第1回転体および第2回転体の外形を越える範囲に配設されるので、発光手段から発光された光を反射部で反射させた後に透過部から外部へ透過させる場合に、箱状体の背面側の内壁面から反射する光を、第1回転体および第2回転体の間の隙間、及び、第1回転体および第2回転体の周囲において遊技者に視認させることができると共に、その光を各回転体の回転と共に変化させることができ、その結果、光の演出効果を有効に発揮させることができる。
遊技機D7において、前記収容体は、前記箱状体の側面側の内壁面であって、前記第1回転体および第2回転体の回転軸に平行に対面する内壁面に、光を反射可能な材料から形成される反射部が配設されることを特徴とする遊技機D8。
遊技機D8によれば、遊技機D7の奏する効果に加え、収容体は、箱状体の側面側の内壁面であって、第1回転体および第2回転体の回転軸に平行に対面する内壁面に、光を反射可能な材料から形成される反射部が配設されるので、収容体の背面側の内壁面で反射した光を更に側面側の内壁面で反射させて遊技者に視認させることができると共に、透過部から透過した光を収容体の側面側の内壁面に反射させて遊技者に視認させることができ、その結果、光の演出効果を有効に発揮させることができる。
遊技機A1からA11,B1からB12,C1からC10及びD1からD8のいずれかにおいて、前記遊技機はスロットマシンであることを特徴とする遊技機K1。中でも、スロットマシンの基本構成としては、「複数の識別情報からなる識別情報列を動的表示した後に識別情報を確定表示する可変表示手段を備え、始動用操作手段(例えば操作レバー)の操作に起因して識別情報の動的表示が開始され、停止用操作手段(ストップボタン)の操作に起因して、或いは、所定時間経過することにより、識別情報の動的表示が停止され、その停止時の確定識別情報が特定識別情報であることを必要条件として、遊技者に有利な特別遊技状態を発生させる特別遊技状態発生手段とを備えた遊技機」となる。この場合、遊技媒体はコイン、メダル等が代表例として挙げられる。
遊技機A1からA11,B1からB12,C1からC10及びD1からD8のいずれかにおいて、前記遊技機はパチンコ遊技機であることを特徴とする遊技機K2。中でも、パチンコ遊技機の基本構成としては操作ハンドルを備え、その操作ハンドルの操作に応じて球を所定の遊技領域へ発射し、球が遊技領域内の所定の位置に配設された作動口に入賞(又は作動口を通過)することを必要条件として、表示手段において動的表示されている識別情報が所定時間後に確定停止されるものが挙げられる。また、特別遊技状態の発生時には、遊技領域内の所定の位置に配設された可変入賞装置(特定入賞口)が所定の態様で開放されて球を入賞可能とし、その入賞個数に応じた有価価値(景品球のみならず、磁気カードへ書き込まれるデータ等も含む)が付与されるものが挙げられる。
遊技機A1からA11,B1からB12,C1からC10及びD1からD8のいずれかにおいて、前記遊技機はパチンコ遊技機とスロットマシンとを融合させたものであることを特徴とする遊技機K3。中でも、融合させた遊技機の基本構成としては、「複数の識別情報からなる識別情報列を動的表示した後に識別情報を確定表示する可変表示手段を備え、始動用操作手段(例えば操作レバー)の操作に起因して識別情報の変動が開始され、停止用操作手段(例えばストップボタン)の操作に起因して、或いは、所定時間経過することにより、識別情報の動的表示が停止され、その停止時の確定識別情報が特定識別情報であることを必要条件として、遊技者に有利な特別遊技状態を発生させる特別遊技状態発生手段とを備え、遊技媒体として球を使用すると共に、前記識別情報の動的表示の開始に際しては所定数の球を必要とし、特別遊技状態の発生に際しては多くの球が払い出されるように構成されている遊技機」となる。
<その他>
パチンコ機等の遊技機において、外周面に複数の図形が描かれると共に外周面を形成する外壁の一部が光透過性の材料から形成される回転体と、その回転体の内部に配設される発光手段と、回転体が回転可能に収容される収容体とを備え、回転体の外周面に描かれた図形を収容体の前面の開放部分から遊技者に視認させる遊技機が知られている(例えば、特許文献1:特開2013−220215号公報)。
しかしながら、上述した従来の遊技機では、光の演出効果が有効に発揮されていないという問題点があった。
本技術的思想は、上記例示した問題点を解決するためになされたものであり、光の演出効果を有効に発揮させることができる遊技機を提供することを目的とする。
<手段>
この目的を達成するために技術的思想1記載の遊技機は、外周面に複数の図形が描かれると共に外周面を形成する外壁の少なくとも一部が光透過性の材料から形成される回転体と、その回転体の内部に配設される発光手段と、前記回転体が回転可能に収容され前面の開放部分を介して前記回転体の外周面に描かれた図形を遊技者に視認させる収容体とを備えるものであり、前記発光手段から発光され前記回転体の外壁から透過された光が、前記収容体で反射して遊技者に視認される。
技術的思想2記載の遊技機は、技術的思想1記載の遊技機において、前記回転体の外壁には、光透過性の材料から形成され前記発光手段から発光された光を前記回転体の外部に透過させる透過部と、光を反射可能な材料から形成され前記発光手段から発光された光を前記回転体の内部へ反射させる反射部とが形成され、前記回転体の回転時に前記透過部および反射部が前記発光手段から発光された光の照射領域を通過可能とされる。
技術的思想3記載の遊技機は、技術的思想2記載の遊技機において、前記発光手段は、前記収容体の前記前面の開放部分へ向けて光を照射する姿勢で配設される。
<効果>
技術的思想1記載の遊技機によれば、光の演出効果を有効に発揮させることができる。
技術的思想2記載の遊技機によれば、技術的思想1記載の遊技機の奏する効果に加え、部品点数の削減と構造の簡素化とを図ることができる。
技術的思想3記載の遊技機によれば、技術的思想2記載の遊技機の奏する効果に加え、光が視認される位置を切り替えることができる。