JP6720063B2 - Image processing device, imaging device, and display system - Google Patents
Image processing device, imaging device, and display system Download PDFInfo
- Publication number
- JP6720063B2 JP6720063B2 JP2016226334A JP2016226334A JP6720063B2 JP 6720063 B2 JP6720063 B2 JP 6720063B2 JP 2016226334 A JP2016226334 A JP 2016226334A JP 2016226334 A JP2016226334 A JP 2016226334A JP 6720063 B2 JP6720063 B2 JP 6720063B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- marker
- detection target
- control unit
- display
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Landscapes
- Image Processing (AREA)
- Closed-Circuit Television Systems (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
Description
本開示は、画像処理装置、撮像装置、および表示システムに関する。 The present disclosure relates to an image processing device, an imaging device, and a display system.
従来、例えば車両等の移動体の外部領域の映像を表示する技術が知られている。例えば、特許文献1には、車両に備えられたカメラの映像を表示するモニタへの電源供給を制御する技術が開示されている。
Conventionally, there is known a technique of displaying an image of an external area of a moving body such as a vehicle. For example,
従来、移動体の外部領域の映像を表示する技術について改善の余地があった。 Conventionally, there has been room for improvement in the technology for displaying an image of an external area of a mobile body.
本開示は、移動体の外部領域の映像を表示する技術の利便性を向上させる画像処理装置、撮像装置、および表示システムに関する。 The present disclosure relates to an image processing device, an imaging device, and a display system that improve the convenience of technology for displaying an image in an external area of a moving body.
本開示の一実施形態に係る画像処理装置は、通信部と、制御部と、を備える。通信部は、移動体の外部領域を撮像した第1映像を取得する。制御部は、第1映像上の表示領域に対応する第2映像を表示装置に表示させる。制御部は、第1映像上の検出領域において検出対象の少なくとも一部を検出し、検出対象の前記少なくとも一部が検出された第1映像上の検出位置が、表示領域の外側且つ検出領域の内側にあり、かつ移動体と検出対象との間の距離が減少する場合、距離の減少に対して移動体と検出対象との何れの寄与が大きいか判定し、移動体の寄与が大きいと判定した場合、検出対象に対応するマーカの少なくとも一部が前記第2映像上で第1方向に移動するように、マーカを第2映像に重畳して表示装置に表示させ、検出対象の寄与が大きいと判定した場合、マーカの少なくとも一部が第2映像上で第2方向に移動するように、マーカを第2映像に重畳して表示装置に表示させる。 An image processing device according to an embodiment of the present disclosure includes a communication unit and a control unit. The communication unit acquires a first video imaged of the external area of the mobile body. The control unit causes the display device to display the second image corresponding to the display area on the first image. The control unit detects at least a part of the detection target in the detection area on the first video, and the detection position on the first video where the at least a part of the detection target is detected is outside the display area and within the detection area. Ri inside near, and if the distance between the moving entity and the detection target is reduced, any contribution of the moving body and the detection target with respect to the distance reduction or determined larger, the larger the contribution of the mobile When determined, the marker is superimposed on the second video and displayed on the display device so that at least a part of the marker corresponding to the detection target moves in the first direction on the second video, and the contribution of the detection target is When it is determined that the marker is large, the marker is superimposed on the second image and displayed on the display device so that at least a part of the marker moves in the second direction on the second image.
本開示の一実施形態に係る撮像装置は、撮像素子と、制御部と、を備える。撮像素子は、移動体の外部領域を撮像した第1映像を生成する。制御部は、第1映像上の表示領域に対応する第2映像を表示装置に表示させる。制御部は、第1映像上の検出領域において検出対象の少なくとも一部を検出し、検出対象の少なくとも一部が検出された第1映像上の検出位置が、表示領域の外側且つ検出領域の内側にあり、かつ前記移動体と前記検出対象との間の距離が減少する場合、前記距離の減少に対して前記移動体と前記検出対象との何れの寄与が大きいか判定し、前記移動体の寄与が大きいと判定した場合、前記検出対象に対応するマーカの少なくとも一部が前記第2映像上で第1方向に移動するように、前記マーカを前記第2映像に重畳して前記表示装置に表示させ、前記検出対象の寄与が大きいと判定した場合、前記マーカの前記少なくとも一部が前記第2映像上で第2方向に移動するように、マーカを第2映像に重畳して表示装置に表示させる。 An imaging device according to an embodiment of the present disclosure includes an imaging element and a control unit. The image pickup element generates a first image obtained by picking up an image of the external area of the moving body. The control unit causes the display device to display the second image corresponding to the display area on the first image. The control unit detects at least a part of the detection target in the detection area on the first video, and the detection position on the first video where at least a part of the detection target is detected is outside the display area and inside the detection area. near is, and when said distance between the moving member and the detection target is decreased, to determine any or large contribution of the detection target and the moving object relative to a decrease in the distance, the moving object When it is determined that the contribution of the marker is large, the marker is superimposed on the second image so that at least a part of the marker corresponding to the detection target moves in the first direction on the second image, the display device. is displayed, if it is determined that the contribution of the detection target is large, so that at least a portion of the marker is moved in the second direction on the second image, by superimposing the M a Ca to a second video Display on the display device.
本開示の一実施形態に係る表示システムは、表示装置と、撮像装置と、画像処理装置と、を備える。撮像装置は、移動体の外部領域を撮像した第1映像を生成する。画像処理装置は、第1映像上の表示領域に対応する第2映像を表示装置に表示させる。画像処理装置は、第1映像上の検出領域において検出対象の少なくとも一部を検出し、検出対象の少なくとも一部が検出された第1映像上の検出位置が、表示領域の外側且つ検出領域の内側にあり、かつ前記移動体と前記検出対象との間の距離が減少する場合、前記距離の減少に対して前記移動体と前記検出対象との何れの寄与が大きいか判定し、前記移動体の寄与が大きいと判定した場合、前記検出対象に対応するマーカの少なくとも一部が前記第2映像上で第1方向に移動するように、前記マーカを前記第2映像に重畳して前記表示装置に表示させ、前記検出対象の寄与が大きいと判定した場合、前記マーカの前記少なくとも一部が前記第2映像上で第2方向に移動するように、マーカを第2映像に重畳して表示装置に表示させる。 A display system according to an embodiment of the present disclosure includes a display device, an imaging device, and an image processing device. The imaging device generates a first video image of the external area of the moving body. The image processing device causes the display device to display the second image corresponding to the display area on the first image. The image processing device detects at least a part of the detection target in the detection area on the first video, and the detection position on the first video where at least a part of the detection target is detected is outside the display area and within the detection area. Ri inside near, and the case where the distance between the moving member and the detection target is decreased, to determine any or large contribution of the detection target and the moving object relative to a decrease in the distance, the moving When it is determined that the contribution of the body is large, the marker is superimposed on the second video so that at least a part of the marker corresponding to the detection target moves in the first direction on the second video, and the display is performed. device to be displayed, if it is determined that the contribution of the detection target is large, so that at least a portion of the marker is moved in the second direction on the second image, by superimposing the M a Ca to a second video Display on the display device.
本開示の一実施形態に係る画像処理装置、撮像装置、および表示システムよれば、移動体の外部領域の映像を表示する技術の利便性が向上する。 According to the image processing device, the imaging device, and the display system according to the embodiment of the present disclosure, the convenience of the technique for displaying the image of the external area of the moving body is improved.
以下、本発明の実施形態について、図面を参照して説明する。 Hereinafter, embodiments of the present invention will be described with reference to the drawings.
(表示システム)
図1を参照して、本発明の一実施形態に係る表示システム10について説明する。
(Display system)
A
図1に示すように、表示システム10は、撮像装置20と、画像処理装置30と、表示装置40と、を備える。撮像装置20表示システム10の各構成要素は、例えばネットワーク51を介して情報を送受信可能である。ネットワーク51は、例えば無線、有線、またはCAN(Controller Area Network)等を含んでよい。
As shown in FIG. 1, the
他の実施形態において、表示システム10の一部または全部の構成要素が、1つの装置として一体的に構成されてよい。例えば、撮像装置20または表示装置40に、画像処理装置30撮像装置20を内蔵させる構成等が考えられる。
In other embodiments, some or all of the components of the
図2に示すように、撮像装置20、画像処理装置30、および表示装置40は、移動体50に備えられてよい。本開示における「移動体」は、例えば車両、船舶、および航空機等を含んでよい。車両は、例えば自動車、産業車両、鉄道車両、生活車両、および滑走路を走行する固定翼機等を含んでよい。自動車は、例えば乗用車、トラック、バス、二輪車、およびトロリーバス等を含んでよい。産業車両は、例えば農業および建設向けの産業車両等を含んでよい。産業車両は、例えばフォークリフトおよびゴルフカート等を含んでよい。農業向けの産業車両は、例えばトラクター、耕耘機、移植機、バインダー、コンバイン、および芝刈り機等を含んでよい。建設向けの産業車両は、例えばブルドーザー、スクレーバー、ショベルカー、クレーン車、ダンプカー、およびロードローラ等を含んでよい。車両は、人力で走行するものを含んでよい。車両の分類は、上述した例に限られない。例えば、自動車は、道路を走行可能な産業車両を含んでよい。複数の分類に同じ車両が含まれてよい。船舶は、例えばマリンジェット、ボート、およびタンカー等を含んでよい。航空機は、例えば固定翼機および回転翼機等を含んでよい。
As shown in FIG. 2, the
撮像装置20は、移動体50の外部領域を撮像可能である。撮像装置20の位置は、移動体50の内部および外部において任意である。例えば図2に示すように、撮像装置20は、移動体50の後方の外部領域を撮像可能な移動体50の後方に位置する。画像処理装置30の位置は、移動体50内において任意である。表示装置40は、対象者60によって視認可能である。表示装置40の位置は、移動体50において任意である。例えば図2に示すように、表示装置40は、移動体50のダッシュボードの中に位置する。
The
(撮像装置)
撮像装置20について詳細に説明する。例えば図1に示すように、撮像装置20は、撮像光学系21と、撮像素子22と、通信部23と、制御部24とを備える。
(Imaging device)
The
撮像光学系21は、被写体像を結像させる。例えば、撮像光学系21は、絞りおよび1つ以上のレンズを含んでよい。
The imaging
撮像素子22は、2次元配列された複数の画素を有する。撮像素子22は、例えばCCD(Charge Coupled Device)撮像素子またはCMOS(Complementary Metal Oxide Semiconductor)撮像素子を含んでよい。撮像素子22は、撮像光学系21によって結像される被写体像を撮像して、撮像画像を生成可能である。
The
通信部23は、外部装置と通信可能な通信インタフェースを含んでよい。通信部23は、ネットワーク51を介して情報の送受信が可能であってよい。外部装置は、例えば画像処理装置30を含んでよい。本開示における「通信インタフェース」は、例えば物理コネクタ、および無線通信機を含んでよい。物理コネクタは、電気信号による伝送に対応した電気コネクタ、光信号による伝送に対応した光コネクタ、および電磁波による伝送に対応した電磁コネクタを含んでよい。電気コネクタは、IEC60603に準拠するコネクタ、USB規格に準拠するコネクタ、RCA端子に対応するコネクタ、EIAJ CP−1211Aに規定されるS端子に対応するコネクタ、EIAJ RC−5237に規定されるD端子に対応するコネクタ、HDMI(登録商標)規格に準拠するコネクタ、およびBNC(British Naval ConnectorまたはBaby-series N Connector等)を含む同軸ケーブルに対応するコネクタを含んでよい。光コネクタは、IEC 61754に準拠する種々のコネクタを含んでよい。無線通信機は、Bluetooth(登録商標)、およびIEEE802.11を含む各規格に準拠する無線通信機を含んでよい。無線通信機は、少なくとも1つのアンテナを含む。
The
制御部24は、1つ以上のプロセッサを含む。本開示における「プロセッサ」は、特定の処理に特化した専用のプロセッサ、および特定のプログラムを読み込むことによって特定の機能を実行する汎用のプロセッサを含んでよい。専用のプロセッサには、DSP(Digital Signal Processor)および特定用途向けIC(ASIC;Application Specific Integrated Circuit)が含まれてよい。プロセッサには、プログラマブルロジックデバイス(PLD;Programmable Logic Device)が含まれてよい。PLDには、FPGA(Field-Programmable Gate Array)が含まれてよい。制御部24は、1つまたは複数のプロセッサが協働するSoC(System-on-a-Chip)、およびSiP(System In a Package)のいずれかであってよい。
The
制御部24は、撮像装置20全体の動作を制御する。制御部24は、任意のフレームレートで、撮像素子22に撮像画像を生成させてよい。当該フレームレートは、例えば、表示装置40が表示可能なフレームレートに略一致してよい。制御部24は、生成された撮像画像に対して、所定の画像処理を実行してよい。当該画像処理は、例えば露出調整処理、ホワイトバランス処理、および歪み補正処理等を含んでよい。制御部24は、通信部23を介して画像処理装置30へ、撮像画像を出力する。例えば、制御部24は、上述のフレームレートで撮像画像を順次に出力してよい。以下、上述のフレームレートで出力される各撮像画像を、単にフレームともいう。撮像装置20から出力される当該複数の撮像画像を、第1映像ともいう。例えばフレームレートが60fps(Flame per Seconds)である場合、1秒あたり60枚の撮像画像が第1映像として出力される。
The
(画像処理装置)
画像処理装置30について詳細に説明する。画像処理装置30は、通信部31と、記憶部32と、制御部33とを備える。
(Image processing device)
The
通信部31は、多様な外部装置と通信可能な通信インタフェースを含んでよい。外部装置は、例えば撮像装置20、表示装置40、移動体50に備えられたECU(Electronic Control UnitまたはEngine Control unit)、速度センサ、加速度センサ、回転角センサ、ステアリング舵角センサ、エンジン回転数センサ、アクセルセンサ、ブレーキセンサ、照度センサ、雨滴センサ、走行距離センサ、ミリ波レーダ、超音波ソナー等を用いた障害物検出装置、ETC(Electronic Toll Collection System)受信装置、GPS(Global Positioning System)装置、ナビゲーション装置、インターネット上のサーバ、携帯電話等を含んでよい。
The
通信部31は、歩車間通信、路車間通信および車車間通信のための通信インタフェースを含んでよい。通信部31は、日本において提供されるDSRC(Dedicated Short-Range Communication:狭帯域通信システム)およびVICS(登録商標)(Vehicle Information and Communication System)の光ビーコンに対応した受信機を含んでよい。通信部31は、他の国の道路交通情報提供システムに対応した受信機を含んでよい。
The
通信部31は、外部装置から多様な情報を取得可能であってよい。例えば、通信部31は、移動体情報および環境情報を取得可能であってよい。
The
移動体情報は、移動体50に関する任意の情報を含んでよい。移動体情報は、例えば移動体50の速度、加速度、旋回重力、傾き、方角、および旋回状況、ステアリングホイールの舵角、冷却水の温度、燃料の残量、バッテリの残量、バッテリの電圧、エンジン回転数、ギアポジション、リバース信号の有無、アクセル操作の有無、アクセル開度、ブレーキ操作の有無、ブレーキ踏度、パーキングブレーキの作動有無、前後輪もしくは4輪の回転数差、タイヤ空気圧、ダンパの伸縮量、運転手の目の空間位置、乗員の数および座席位置、シートベルトの装着情報、ドアの開閉、窓の開閉、車内温度、空調の動作有無、空調の設定温度、空調の送風量、外気循環の設定、ワイパーの作動状況、走行モード、外部機器との接続情報、現在時刻、平均燃費、瞬間燃費、各種ランプの点灯状態、移動体50の位置情報、ならびに移動体50の目的地までの経路情報等を含んでよい。各種ランプは、例えばヘッドランプ、フォグランプ、バックランプ、ポジションランプ、およびターンシグナルを含んでよい。
The mobile body information may include any information regarding the
環境情報は、移動体50の外部環境に関する任意の情報を含んでよい。環境情報は、例えば移動体50の周囲の明るさ、天気、気圧、外気温度、地図情報、交通情報、道路工事情報、走行路の制限速度の一時的な変更、他の車両が検出した対象物、および信号機の点灯状態等を含んでよい。
The environment information may include any information regarding the external environment of the
記憶部32は、一時記憶装置および二次記憶装置を含んでよい。記憶部32は、例えば半導体メモリ、磁気メモリ、および光メモリ等を用いて構成されてよい。半導体メモリは、揮発性メモリおよび不揮発性メモリを含んでよい。磁気メモリは、例えばハードディスクおよび磁気テープ等を含んでよい。光メモリは、例えばCD(Compact Disc)、DVD(Digital Versatile Disc)、およびBD(Blu-ray Disc)(登録商標)等を含んでよい。記憶部32は、画像処理装置30の動作に必要な種々の情報およびプログラムを記憶する。
The
制御部33は、1つ以上のプロセッサを含む。制御部33は、画像処理装置30全体の動作を制御する。
The
制御部33は、通信部31を介して外部装置から、移動体情報および環境情報を取得してよい。制御部33は、例えば移動体情報に基づいて、移動体50の予測進路を決定してよい。以下、移動体50の予測進路を、第1予測進路ともいう。
The
制御部33は、通信部31を介して撮像装置20から、第1映像を取得してよい。第1映像は、検出領域と表示領域とを含む。
The
制御部33は、取得された第1映像上の検出領域内において、検出対象の少なくとも一部を検出してよい。第1映像上の検出領域は、第1映像の各フレームである撮像画像上の少なくとも一部の領域であってよい。第1映像の各フレームは、撮像画像と呼びうる。第1映像上の検出領域は、表示領域より大きくてよい。第1映像上の検出領域は、表示領域を包含してよい。制御部33は、表示領域の内側において検出対象を検出し得る。制御部33は、表示領域の外側であって検出領域の内側において、検出対象を検出し得る。検出領域および表示領域の内側の領域は、第1領域と呼びうる。検出領域の内側であって表示領域の外側の領域は、第2領域と呼び得る。
The
検出対象は、複数の種類の物体を含んでよい。物体の種類は、例えば人、他の移動体、走行路、車線、白線、側溝、歩道、横断歩道、道路標識、交通標識、ガードレール、壁、および信号機等を含んでよい。制御部33が検出可能な検出対象の種類は、これらに限られない。検出対象の少なくとも一部は、例えば第1映像上の検出対象の一部が他の物体の陰に隠れている場合において、当該検出対象の、当該他の物体の陰に隠れていない部分を含んでよい。例えば、制御部33は、第1映像上で歩行者の下半身が障害物の陰に隠れている場合に、当該歩行者の上半身を検出可能であってよい。検出対象の少なくとも一部の検出には、任意の物体検出アルゴリズムが採用可能であってよい。例えば、制御部33は、第1映像の各フレームである撮像画像を用いたパターンマッチングまたは特徴点抽出等のアルゴリズムによって、検出対象の少なくとも一部を検出してよい。
The detection target may include multiple types of objects. Types of objects may include, for example, people, other vehicles, lanes, lanes, white lines, gutters, sidewalks, pedestrian crossings, road signs, traffic signs, guardrails, walls, traffic lights, and the like. The types of detection targets that the
制御部33は、第1映像上で検出対象の少なくとも一部が検出されると、第1映像に基づいて、当該検出対象の予測進路を決定してよい。以下、検出対象の予測進路を、第2予測進路ともいう。第2予測進路の決定には、任意のアルゴリズムが採用可能であってよい。例えば、制御部33は、第1映像の各フレームである撮像画像上の、検出対象の向きおよび位置の変化に基づいて、第2予測進路を決定してよい。
When at least a part of the detection target is detected on the first video, the
制御部33は、第1映像上で検出対象の少なくとも一部が検出されると、第1映像に基づいて、移動体50および当該検出対象の相対的位置関係を推定してよい。相対的位置関係は、例えば移動体50と検出対象との間の距離、および、移動体50の第1予測進路と検出対象の第2予測進路との重なりの有無等を含んでよい。移動体50と検出対象との間の距離の推定には、任意のアルゴリズムが採用可能であってよい。例えば、制御部33は、第1映像信号の各フレームである撮像画像を用いて、モーションステレオ法によって、移動体50と検出対象との間の距離を推定してよい。他の実施形態において、制御部33は、通信部31を介して外部装置から、移動体50および当該検出対象の相対的位置関係を示す情報を取得してよい。
When at least a part of the detection target is detected on the first video, the
制御部33は、移動体50と検出対象との間の距離が減少する場合、当該距離の減少に対して移動体50と検出対象との何れの寄与が大きいかを判定してよい。当該距離の減少に対する移動体50および検出対象の寄与の決定には、任意のアルゴリズムが採用可能であってよい。一例において、制御部33は、移動体情報に基づいて、移動体50の移動速度を検出してよい。制御部33は、例えば第1映像の各フレームである撮像画像上の検出対象の位置の変化に基づいて、当該検出対象の移動速度を検出してよい。制御部33は、当該距離の減少に対して、移動体50および検出対象のうち何れか移動速度が大きい一方の寄与が大きいと判定してよい。他の例において、制御部33は、移動体50の移動速度が基準値未満である場合、当該距離の減少に対して検出対象の寄与が大きいと判定してよい。制御部33は、移動体50の移動速度が基準値以上である場合、当該距離の減少に対して移動体50の寄与が大きいと判定してよい。当該基準値は、任意に定められてよいが、例えば略ゼロに定められてよい。当該距離の減少に対する移動体50および検出対象の寄与に応じた画像処理装置30の動作の詳細については後述する。
When the distance between the moving
制御部33は、第1映像上で検出対象の少なくとも一部が検出されると、第1映像に基づいて、移動体50と当該検出対象とが接触する可能性があるか否かを判定してよい。移動体50と検出対象とが接触する可能性の決定には、任意のアルゴリズムが採用可能であってよい。例えば、制御部33は、移動体50と検出対象との間の距離が所定の閾値未満であるとの条件、および、当該距離の減少速度が所定の閾値以上であるとの条件の少なくとも一方が満たされる場合、移動体50と検出対象とが接触する可能性があると判定してよい。当該可能性の有無に応じた画像処理装置30の動作の詳細については後述する。
When at least a part of the detection target is detected on the first video, the
制御部33は、撮像装置20から取得された第1映像上の表示領域に対応する第2映像を、表示装置40に表示させてよい。具体的には、制御部33は、通信部31を介して、第2映像を表示装置40へ出力してよい。例えば、制御部33は、移動体情報に基づいて移動体50の後進を検出すると、第2映像を表示装置40に表示させてよい。例えば、制御部33は、変速ギアのシフトポジションに基づいて後進を検出し得る。例えば、制御部33は、後進の際に移動体から出力されるリバース信号に基づいて後進を検出し得る。第2映像は、例えば第1映像の各フレームである撮像画像上の表示領域を切り出した映像であってよい。第1映像上の表示領域は、第1映像の各フレームである撮像画像上の少なくとも一部の領域であってよい。表示領域は、検出領域よりも小さくてよい。表示領域は、検出領域に包含されてよい。表示領域の位置、形状、および大きさは、任意に定め得る。制御部33は、表示領域の位置、形状、および大きさを変化させ得る。表示領域の位置、形状、および大きさが変化することによって、例えば表示領域と検出領域とが略一致してもよい。
The
制御部33は、種々のマーカを、第2映像に合成して表示装置40に表示させてよい。合成には、上書きおよび混合が含まれる。マーカは、例えば1つ以上の画像を含んでよい。制御部33は、第2映像に重畳するマーカの少なくとも一部の表示態様を、動的に変化させてよい。表示態様は、例えば第2映像上のマーカの少なくとも一部の位置、大きさ、形状、色、および濃淡等を含んでよい。制御部33は、第1映像上で検出された検出対象に対応するマーカを表示する場合、当該検出対象の種類に応じて、当該マーカの表示態様を決定してよい。種々のマーカを表示装置40に表示させる画像処理装置30の動作の詳細については後述する。
The
(表示装置)
表示装置40について詳細に説明する。表示装置40は、例えば液晶ディスプレイおよび有機EL(Electroluminescence)ディスプレイ等を含んでよい。表示装置40は、例えばネットワーク51を介して画像処理装置30から入力される第2映像を表示してよい。表示装置40は、ユーザによる操作を受付可能なタッチスクリーンとして機能してよい。表示装置40は、ユーザによる操作を受付可能なスイッチおよびキーを含んでよい。スイッチは、物理スイッチおよび電子スイッチを含んでよい。キーは、物理キーおよび電子キーを含んでよい。表示装置40は、自装置に対するユーザの操作を受け付けると、当該操作に基づくユーザ入力を画像処理装置30へ送信してよい。
(Display device)
The
図3乃至図16を参照して、画像処理装置30が表示装置40に表示させる第2映像および種々のマーカについて、具体的に説明する。本開示において、映像または画像について「上下方向」および「左右方向」との文言は、当該映像または当該画像における2次元方向に対応する。本開示において、映像または画像について「高さ方向」、「水平方向」、および「奥行き方向」との文言は、当該映像または当該画像が映す空間の3次元方向に対応する。
The second image and various markers displayed on the
(第1例)
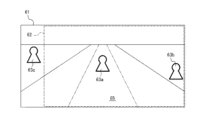
図3は、画像処理装置30が撮像装置20から取得した第1映像における検出領域61の第1例を示す。図3に示す例では、検出領域61は、上下方向に比べて左右方向に長い。表示領域62は、検出領域61の左右方向における中央に位置する。制御部33は、第1映像上の表示領域62の内側に映っている歩行者63および車両64それぞれを、検出対象として検出してよい。
(First example)
FIG. 3 shows a first example of the
制御部33は、第1映像上の表示領域62の内側で検出された検出対象と、移動体50と、の相対的位置関係に基づいて、1つ以上の条件が満たされているか否かを判定する。1つ以上の条件は、例えば検出対象が移動体50の第1予測進路65内に位置するとの第1条件を含んでよい。1つ以上の条件は、例えば移動体50の第1予測進路65の少なくとも一部と、検出対象の第2予測進路の少なくとも一部と、が重なるとの第2条件を含んでよい。当該1つ以上の条件が満たされると判定された場合、制御部33は、検出対象に対応する所定のマーカを、第2映像に重畳して表示装置40に表示させてよい。所定のマーカは、第1マーカ、第2マーカ、および第3マーカを含んでよい。
The
第1例において、制御部33は、歩行者63について当該1つ以上の条件が満たされていると判定し得る。かかる場合、制御部33は、歩行者63に対応するマーカを表示させてよい。制御部33は、車両64について当該1つ以上の条件が満たされていないと判定し得る。かかる場合、制御部33は、車両64に対応するマーカを表示しない。
In the first example, the
図4は、図3に示す第1映像の表示領域62に対応する第2映像の例を示す。制御部33は、第1映像の表示領域62のアスペクト比と、表示装置40の画面のアスペクト比とが異なる場合、第1映像の表示領域62を切り出した後、表示装置40の画面のアスペクト比に合わせて変形した第2映像を、表示装置40へ出力してよい。図4に示すように、第2映像上に、歩行者63および車両64が映っている。
FIG. 4 shows an example of the second video corresponding to the
制御部33は、例えば図3に示す移動体50の第1予測進路65の少なくとも一部を示すガイド線66を、第2映像に重畳させて表示装置40に表示させてよい。制御部33は、例えばステアリングホイールの舵角の変化に応じて、ガイド線66を動的に変化させてよい。
The
第1映像は、表示領域62に比べて範囲が広い。制御部33は、表示領域62の範囲を変更し得る。制御部33は、第2映像にアイコン画像67を重畳させて表示装置40に表示させてよい。例えば図4に示すアイコン画像67の輪郭67aは、表示領域62の範囲を変更した際の最大範囲を示す。アイコン画像67の白い長方形67bは、表示領域62を示す。図4に示すアイコン画像67は、表示領域62の最大範囲に対する表示領域62の相対的な位置および大きさを示す。
The first image has a wider range than the
図5は、例えば第2映像上の歩行者63に重畳されるマーカの例を示す。以下、当該マーカを、第3マーカ68ともいう。第3マーカ68の輪郭線69は、第2映像上で検出された歩行者63の輪郭線に略一致してよい。第3マーカ68の輪郭線69の内側の領域70は、例えば検出対象の種類である「人」に対応する色またはパターンで塗り潰されてよい。制御部33は、第1映像上で歩行者63が検出されると、第2映像上の歩行者63に第3マーカ68を重畳して表示装置40に表示させてよい。かかる構成によれば、対象者60は、第2映像上の歩行者63を容易に視認可能となる。制御部33は、第3マーカ68を表示させてから所定時間が経過すると、当該第3マーカ68を非表示にしてよい。
FIG. 5 shows an example of markers that are superimposed on the
図6は、例えば第2映像上の歩行者63の周辺に重畳される2種類のマーカの例を示す。以下、当該2種類のマーカそれぞれを、第1マーカ71および第2マーカ72ともいう。制御部33は、例えば第3マーカ68を非表示にした後に、第1マーカ71および第2マーカ72を、第2映像に重畳して表示装置40に表示させてよい。
FIG. 6 shows an example of two types of markers that are superimposed around the
制御部33は、第2映像上の歩行者63に追従して、第1マーカ71の位置を移動させてよい。対象者60は、第1マーカ71が歩行者63に追従するので、歩行者63を捕らえやすい。第1マーカ71は、歩行者63の周囲に歩行者63から離れて表示される。対象者60は、第1マーカ71が表示装置40に表示されているときに、歩行者63の振る舞いを把握しやすい。制御部33は、第2映像上の第1マーカ71の重畳位置に対して、第2マーカ72の重畳位置を相対的に変化させてよい。制御部33は、第1マーカ71の位置を基準にして、第2マーカを相対的に移動させてよい。
The
例えば、制御部33は、移動体50と歩行者63との間の距離が減少しているときに、当該距離の減少に対して移動体50の寄与が大きいと判定し得る。かかる場合、制御部33は、第2マーカ72を第1マーカ71に向かって移動させてよい。まず、制御部33は、第1マーカ71から離れた位置に第2マーカ72を表示させる。次に、制御部33は、第1マーカ71との距離が所定距離になるまで、第2マーカ72を第1マーカ71に向かって移動させる。次に、制御部33は、第2マーカ72を消す。次に、制御部33は、再び第1マーカ71から離れた位置に第2マーカ72を表示させ、上述の処理を繰り返す。この例において、第2マーカ72は、第1マーカ71という対象物に向かって移動しているため、対象者60は、第2マーカ72が第1マーカ71に向かって近づいていると理解し得る。
For example, when the distance between the moving
例えば、制御部33は、移動体50と歩行者63との間の距離が減少しているときに、当該距離の減少に対して歩行者63の寄与が大きいと判定し得る。かかる場合、制御部33は、第2マーカ72を第1マーカ71から離れるように移動させてよい。まず、制御部33は、第1マーカ71に近い位置に第2マーカ72を表示させる。次に、制御部33は、第1マーカ71との距離が所定距離になるまで、第2マーカ72を第1マーカ71から離れるように移動させる。次に、制御部33は、第2マーカ72を消す。次に、制御部33は、再び第1マーカ71に近い位置に第2マーカ72を表示させ、上述の処理を繰り返す。この例において、第2マーカ72は、第1マーカ71という対象物から移動しているため、対象者60は、第2マーカ72が第1マーカ71に向かって離れていると理解し得る。
For example, when the distance between the moving
制御部33は、移動体50と歩行者63との間の距離の減少に対する移動体50および歩行者63の寄与の多寡に応じて、第1マーカ71に対する第2マーカ72の移動方向を変更する。対象者60は、第2マーカ72の移動方向に応じて、例えば移動体50が歩行者63に近付いているのか、または歩行者63が移動体50に近付いているのかを識別可能となる。
The
制御部33は、例えば図7に示すように、第2映像上の第1マーカ71を中心として第2マーカ72の拡大または縮小を繰り返してよい。制御部33は、例えば図8に示すように、歩行者63の輪郭線69と同様の形状を有する第1マーカ71および第2マーカ72を第2映像に重畳してよい。制御部33は、当該第1マーカ71を中心として第2マーカ72の拡大または縮小を繰り返してよい。制御部33は、移動体50と歩行者63との間の距離の減少に対する移動体50および歩行者63の寄与の多寡に応じて、第2マーカ72の拡大または縮小を切り替える。
For example, as shown in FIG. 7, the
制御部33は、第1マーカ71および第2マーカ72を表示している検出対象と移動体50との間の距離が所定の閾値未満となった場合、新たなマーカを第2映像に重畳してよい。以下、当該新たなマーカを第4マーカともいう。第4マーカは、任意の画像を含んでよい。例えば、第4マーカは、感嘆符「!」を示す画像を含んでよい。かかる構成によれば、例えば第1マーカ71および第2マーカ72を表示している歩行者63と移動体50とが一定程度以上近付くと、第4マーカが第2映像に重畳して表示される。対象者60は、第4マーカによって、例えば歩行者63が移動体50の近傍に位置することを識別可能となる。他の実施形態において、制御部33は、第1マーカ71および第2マーカ72を表示している検出対象と移動体50との間の距離が所定の閾値未満となった場合、当該第1マーカ71および第2マーカ72の表示態様を変化させてよい。制御部33は、例えば、第1マーカ71および第2マーカ72の色を変化させてよい。かかる構成によっても、対象者60は、マーカの色の変化によって、例えば歩行者63が移動体50の近傍に位置することを識別可能となる。
When the distance between the detection target displaying the
制御部33は、奥行き方向の前後に並んだ2つの検出対象を検知し得る。制御部33は、前後に位置する2つの検出対象のそれぞれに、第1マーカ71および第2マーカ72を表示させてよい。制御部33は、2つの検出対象に対して、異なる第1マーカ71および第2マーカ72を付し得る。例えば、制御部33は、奥側に位置する第1の検出対象に対して、手前側に位置する第2の検出対象に付す第1マーカ71および第2マーカ72より目立たない第1マーカ71および第2マーカ72を付し得る。例えば、制御部33は、手前側に位置する第2の検出対象に付す第1マーカ71および第2マーカ72より、奥側に位置する第1の検出対象に付す第1マーカ71および第2マーカ72の、色を暗く、透過率を高く、線を細くする等の変更をし得る。
The
(第2例)
図9は、画像処理装置30が撮像装置20から取得した第1映像における検出領域61の第2例を示す。図9に示す例では、検出領域61は、上下方向に比べて左右方向に長い。表示領域62は、検出領域61の左右方向における中央に位置する。制御部33は、第1映像上の表示領域62の内側に映っている歩行者63aと、表示領域62の外側であって検出領域61の内側に映っている歩行者63bおよび63cとを、それぞれ検出対象として検出してよい。歩行者63aに関する制御部33の処理は、例えば図3に示す歩行者63に関する処理と同様である。
(Second example)
FIG. 9 shows a second example of the
制御部33は、検出対象が検出された第1映像上の検出位置が、表示領域62の外側且つ検出領域61の内側である場合、検出対象に対応するマーカを第2映像に重畳して表示装置40に表示させてよい。以下、当該マーカを第5マーカともいう。制御部33は、移動体50と当該検出対象とが接触する可能性があると判定された場合に、第5マーカを表示させてよい。制御部33は、当該検出対象が検出された第1映像上の検出位置が、表示領域62よりも右側にある場合、第5マーカを、第2映像上の右端に重畳して表示装置40に表示させてよい。制御部33は、当該検出対象が検出された第1映像上の検出位置が、表示領域62よりも左側にある場合、第5マーカを、第2映像上の左端に重畳して表示装置40に表示させてよい。
When the detection position on the first video in which the detection target is detected is outside the
第2例において、歩行者63bが検出された検出位置は、表示領域62よりも右側にある。制御部33は、移動体50と歩行者63bとが接触する可能性があると判定し得る。かかる場合、制御部33は、歩行者63bに対応する第5マーカを、第2映像上の右端に重畳して表示装置40に表示させてよい。歩行者63bに対応する第5マーカの詳細については後述する。歩行者63cが検出された検出位置は、表示領域62よりも左側にある。制御部33は、移動体50と歩行者63cとが接触する可能性がないと判定し得る。かかる場合、制御部33は、歩行者63bに対応する第5マーカを表示させなくてよい。
In the second example, the detection position where the
図10は、図9に示す第1映像の表示領域62に対応する第2映像の例を示す。図10に示すように、第2映像上に歩行者63aが映っている。第2映像上に歩行者63bおよび63cは映っていない。
FIG. 10 shows an example of the second video corresponding to the
図10に示すように、制御部33は、例えば障害物画像74を第2映像に重畳して表示装置40に表示させてよい。障害物画像57は、移動体50に備えられた超音波ソナー等を用いた障害物検出装置の検出結果を示す。障害物画像74は、画像74aと、画像74bと、画像74cとを含み得る。画像74aは、移動体50を上方から俯瞰した画像である。画像74bは、移動体50の左後方に障害物が検出されたことを示す画像である。画像74cは、移動体50の右後方に障害物が検出されたことを示す画像である。障害物検出装置による障害物の検出結果と、制御部33による検出対象の検出結果とは、必ずしも一致しなくてよい。例えば図10に示す例では、障害物画像74は、移動体50の右後方および左後方に、それぞれ障害物が検出されたことを示す。一方、制御部33は、移動体50の左後方に存在する歩行者63cについては、移動体50と接触する可能性がないと判定し得る。かかる場合、制御部33は、歩行者63cに対応する第5マーカを表示させなくてよい。
As shown in FIG. 10, the
歩行者63bに対応する第5マーカ73の例を図10に示す。第5マーカ73は、アイコン画像73aと、帯画像73bと、を含んでよい。アイコン画像73aは、検出対象の種類である「人」に対応する画像であってよい。アイコン画像73aを視認した対象者60は、第2映像よりも右方に人が存在することを認識可能である。帯画像73bは、例えば第2映像上の上下方向に延びる帯状の画像である。帯画像73bは、例えば検出対象の種類である「人」に対応する色またはパターンで塗り潰されてよい。制御部33は、第2映像上の右端領域73c内において、帯画像73bを移動させてよい。制御部33は、帯画像73bの移動速度および幅を変化させてよい。
An example of the
第5マーカ73について詳細に説明する。制御部33は、移動体50と歩行者63bとの間の距離に応じて、帯画像73bの幅を決定してよい。例えば、制御部33は、当該距離が近付くほど、帯画像73bの幅を太くしてよい。帯画像73bを視認した対象者60は、帯画像73bの幅に基づいて、移動体50と歩行者63bとの間の距離を認識可能である。
The
制御部33は、移動体50と歩行者63bとの間の距離の減少に対して、例えば移動体50の寄与が大きいと判定し得る。かかる場合、制御部33は、第2映像上の右端領域73c内において、帯画像73bを第1方向に繰り返し移動させる。第1方向は、例えば第2映像上の左右方向において外側から内側に向かう方向であってよい。制御部33は、移動体50と歩行者63bとの間の距離の減少に対して、例えば歩行者63bの寄与が大きいと判定し得る。かかる場合、制御部33は、第2映像上の右端領域73c内において、帯画像73bを第2方向に繰り返し移動させる。第2方向は、例えば第2映像上の左右方向において内側から外側に向かう方向であってよい。帯画像73bを視認した対象者60は、帯画像73bの移動方向に基づいて、移動体50が歩行者63bに近付いているのか、または歩行者63bが移動体50に近付いているのかを認識可能である。
The
制御部33は、移動体50と歩行者63bとの間の距離の減少速度に応じて、帯画像73bの移動速度を決定してよい。例えば、当該距離の減少速度が速いほど、帯画像73bの移動速度を速くしてよい。帯画像73bを視認した対象者60は、帯画像73bの移動速度に基づいて、移動体50と歩行者63bとの間の距離の減少速度を認識可能である。
The
制御部33は、第5マーカ73を表示させた状態において、例えば所定のユーザ操作に応じたユーザ入力を検出すると、第1映像上の歩行者63bの検出位置が表示領域62の内側に含まれるように表示領域62を変化させてよい。例えば図11に示すように、制御部33は、第1映像上の表示領域62を左右方向に長くし、表示領域62を検出領域61内の右側に寄せてよい。かかる構成によって、例えば図12に示すように、第2映像上に歩行者63bが映る。
When the
上述した所定のユーザ操作は、任意のユーザ操作を含んでよい。例えば、上述した所定のユーザ操作は、移動体50のステアリングの舵角を変化させる第1ユーザ操作を含んでよい。第5マーカ73は、第2ユーザ操作を受け付けるGUI(Graphic User Interface)として機能してよい。以下、GUIをインタフェース画像ともいう。かかる場合、上述した所定のユーザ操作は、第2ユーザ操作を含んでよい。
The predetermined user operation described above may include an arbitrary user operation. For example, the predetermined user operation described above may include a first user operation that changes the steering angle of the steering wheel of the moving
制御部33は、第1映像上の歩行者63bの検出位置が表示領域62の内側に含まれるように、表示領域62を自動的に変化させてよい。この場合、制御部33は、第1映像の検出領域61において歩行者63bが検出されなくなるまで、表示領域62の自動変更を維持し得る。
The
制御部33は、例えば図12に示すように、表示領域62の変化に応じてアイコン画像67を変化させてよい。
The
制御部33は、例えば表示装置40に対するピンチイン操作およびピンチアウト操作等に応じて、第1映像上の表示領域62を変化させてよい。例えば図13に示すように、制御部33は、表示領域62を検出領域61に略一致させてよい。かかる場合、例えば図14に示すように、検出領域61内の全ての検出対象が表示装置40に表示される。
The
(第3例)
図15は、画像処理装置30が撮像装置20から取得した第1映像における検出領域61の第3例を示す。図15に示す例では、検出領域61は、上下方向に比べて左右方向に長い。表示領域62は、検出領域61の左右方向における中央に位置する。制御部33は、移動体50の第1予測進路65内に映っている車両64aと、第1予測進路65外に映っている車両64bおよび歩行者63dとを、それぞれ検出対象として検出してよい。
(Third example)
FIG. 15 shows a third example of the
第3例では、例えば夜間またはトンネル内等、移動体50の外部領域が暗い場合について説明する。移動体50の外部領域が暗い場合、第1映像および第2映像の特性値が低下する場合がある。特性値は、映像の視認性に関する任意のパラメータを含んでよい。例えば、特性値は、例えば映像の輝度値およびコントラスト比のうち少なくとも一方を含んでよい。第2映像の特性値が低下すると、第2映像の視認性が低下し得る。
In the third example, a case where the external area of the moving
制御部33は、第2映像上の検出対象に対応する領域に対して、特定画像処理を実行してよい。特定画像処理は、検出対象に対応するマーカを当該領域に重畳する第1処理を含んでよい。以下、当該マーカを第6マーカともいう。第6マーカは、例えば第2映像上の検出対象の輪郭形状に略一致する画像を含んでよい。かかる構成によれば、第2映像上の検出対象に第6マーカが重畳して表示される。このため、対象者60は、第2映像の特性値が低い場合であっても、第2映像上の検出対象を容易に認識可能である。特定画像処理は、第2映像上の検出対象に対応する当該領域の特性値を変化させる第2処理を含んでよい。例えば、制御部33は、第2映像上の当該領域の視認性を向上させるように、当該領域の特性値を変化させてよい。かかる構成によれば、第2映像上の検出対象の視認性が向上する。このため、対象者60は、第2映像の特性値が低い場合であっても、第2映像上の検出対象を容易に認識可能である。
The
制御部33は、1つ以上の条件が満たされる場合に、上述の特定画像処理を実行してよい。1つ以上の条件は、検出対象が移動体50の第1予測進路65内に位置するとの条件を含んでよい。1つ以上の条件は、移動体50の第1予測進路65と、検出対象の第2予測進路とが重なるとの条件を含んでよい。1つ以上の条件は、移動体50と検出対象との間の距離が所定の閾値未満であるとの条件を含んでよい。1つ以上の条件は、第2映像の少なくとも一部の領域の特性値が、所定の閾値未満であるとの条件を含んでよい。
The
第3例において、制御部33は、車両64a、64b、および歩行者63dそれぞれについて、上述した1つ以上の条件が満たされると判定し得る。かかる場合、制御部33は、例えば図16に示すように、車両64a、64b、および歩行者63dにそれぞれ対応する3つの第6マーカ75a、75b、および75cを、第2映像に重畳して表示装置40に表示させてよい。制御部33は、明るい場所において、検出対象に第6マーカを重ねて表示させてよい。
In the third example, the
制御部33は、ガイド線66の形状を変更してよい。制御部33は、ガイド線66と検出対象とが重なる領域におけるガイド線66の形状を変更してよい。図17は、ガイド線66の形状例の1つである。図17のガイド線66は、ガイド線66と第6マーカ75aが重なっている領域に、ガイド線が表示されていない。ガイド線66の形状例は、消去に限られず、他のデザイン変更を許容する。デザイン変更には、色の変更、透過率の変更、破線等への種別の変更、線の太さの変更、および点滅等が含まれる。制御部33は、第6マーカが表示されていないときに、ガイド線66の形状を変更してよい。制御部33は、検出対象に第1マーカ71および第2マーカ72を表示しているときに、ガイド線66の形状を変更してよい。
The
以上述べたように、一実施形態に係る表示システム10によれば、第1映像上で検出された検出対象に応じた多様なマーカが、第2映像に重畳して表示装置40に表示される。マーカを視認する対象者60は、移動体50と検出対象との相対的位置関係を一見して認識可能である。このため、移動体50の外部領域の映像を表示する技術の利便性が向上する。
As described above, according to the
本発明を諸図面や実施形態に基づき説明してきたが、当業者であれば本開示に基づき種々の変形や修正を行うことが容易であることに注意されたい。したがって、これらの変形や修正は本発明の範囲に含まれることに留意されたい。例えば、各手段、各ステップ等に含まれる機能等は論理的に矛盾しないように再配置可能であり、複数の手段やステップ等を1つに組み合わせたり、あるいは分割したりすることが可能である。 Although the present invention has been described based on the drawings and the embodiments, it should be noted that those skilled in the art can easily make various variations and modifications based on the present disclosure. Therefore, it should be noted that these variations and modifications are included in the scope of the present invention. For example, the functions and the like included in each means and each step can be rearranged so as not to be logically contradictory, and a plurality of means and steps can be combined or divided. ..
例えば、上述した実施形態に係る表示システム10の各構成要素および機能は再配置可能であってよい。例えば、画像処理装置30の構成および機能の一部または全部を、撮像装置20および表示装置40の少なくとも一方に包含させてもよい。
For example, each component and function of the
上述の実施形態に係る表示システム10の構成要素の一部は、移動体50の外部に位置してよい。例えば、画像処理装置30等は、携帯電話または外部サーバ等の通信機器として実現され、表示システム10の他の構成要素と有線または無線によって接続されてもよい。
Some of the components of the
10 表示システム
20 撮像装置
21 撮像光学系
22 撮像素子
23 通信部
24 制御部
30 画像処理装置
31 通信部
32 記憶部
33 制御部
40 表示装置
50 移動体
51 ネットワーク
60 対象者
61 検出領域
62 表示領域
63、63a、63b、63c、63d 歩行者
64、64a、64b 車両
65 第1予測進路
66 ガイド線
67 アイコン画像
68 第3マーカ
69 輪郭線
70 領域
71 第1マーカ
72 第2マーカ
73 第5マーカ
73a アイコン画像
73b 帯画像
73c 右端領域
74 障害物画像
75a、75b、75c 第6マーカ
10
Claims (8)
前記第1映像上の表示領域に対応する第2映像を表示装置に表示させる制御部と、
を備え、
前記制御部は、
前記第1映像上の検出領域において検出対象の少なくとも一部を検出し、
前記検出対象の前記少なくとも一部が検出された前記第1映像上の検出位置が、前記表示領域の外側且つ前記検出領域の内側にあり、かつ前記移動体と前記検出対象との間の距離が減少する場合、前記距離の減少に対して前記移動体と前記検出対象との何れの寄与が大きいか判定し、
前記移動体の寄与が大きいと判定した場合、前記検出対象に対応するマーカの少なくとも一部が前記第2映像上で第1方向に移動するように、前記マーカを前記第2映像に重畳して前記表示装置に表示させ、
前記検出対象の寄与が大きいと判定した場合、前記マーカの前記少なくとも一部が前記第2映像上で第2方向に移動するように、前記マーカを前記第2映像に重畳して前記表示装置に表示させる、画像処理装置。 A communication unit that acquires a first image of an external area of the moving body;
A control unit for causing a display device to display a second image corresponding to a display area on the first image;
Equipped with
The control unit is
Detecting at least a part of a detection target in the detection area on the first image,
The distance between the detection position on the at least partially detected the first image of the detection target, Ri inside near the outer and the detection region of the display region, and the movable body and the detection target If decreases, it is determined which contribution of the moving body and the detection target to the decrease of the distance is large,
When it is determined that the contribution of the moving body is large, the marker is superimposed on the second video so that at least a part of the marker corresponding to the detection target moves in the first direction on the second video. Display on the display device,
If it is determined that the contribution of the detection target is large, so that at least a portion of the marker is moved in the second direction on the second image, the display device by superimposing the marker before Symbol second image Image processing device to be displayed on.
前記第1方向は、前記第2映像上の左右方向において外側から内側に向かう方向であり、The first direction is a direction from the outer side to the inner side in the left-right direction on the second image,
前記第2方向は、前記第2映像上の左右方向において内側から外側に向かう方向である、画像処理装置。The image processing device, wherein the second direction is a direction from the inner side to the outer side in the left-right direction on the second image.
前記検出対象は、複数種類の物体を含み、
前記制御部は、前記第1映像上で検出された物体の種類に応じて、前記マーカの色および形状の少なくとも一方を決定する、画像処理装置。 The image processing apparatus according to claim 1 or 2 , wherein
The detection target includes a plurality of types of objects,
The image processing apparatus, wherein the control unit determines at least one of the color and the shape of the marker according to the type of the object detected on the first video.
前記制御部は、前記移動体と前記検出対象との間の距離の減少速度に応じて、前記マーカの前記少なくとも一部の移動速度を決定する、画像処理装置。 The image processing apparatus according to any one of claims 1 to 3 ,
The image processing apparatus, wherein the control unit determines a moving speed of the at least a part of the marker according to a decreasing speed of a distance between the moving body and the detection target.
前記制御部は、前記移動体と前記検出対象との間の距離に応じて、前記マーカの少なくとも一部の幅を変化させる、画像処理装置。 The image processing apparatus according to any one of claims 1 to 4,
The said control part is an image processing apparatus which changes the width|variety of at least one part of the said marker according to the distance between the said moving body and the said detection object.
前記制御部は、
前記検出対象が検出された前記第1映像上の検出位置が前記表示領域よりも右側にある場合、前記マーカを、前記第2映像の右端に重畳して前記表示装置に表示させ、
前記検出位置が前記表示領域よりも左側にある場合、前記マーカを、前記第2映像の左端に重畳して前記表示装置に表示させる、画像処理装置。 The image processing apparatus according to any one of claims 1 to 5, wherein
The control unit is
When the detection position on the first video in which the detection target is detected is on the right side of the display area, the marker is displayed on the display device by being superimposed on the right end of the second video,
An image processing apparatus, wherein when the detected position is on the left side of the display area, the marker is displayed on the display device by being superimposed on the left end of the second image.
前記第1映像上の表示領域に対応する第2映像を表示装置に表示させる制御部と、
を備え、
前記制御部は、
前記第1映像上の検出領域において検出対象の少なくとも一部を検出し、
前記検出対象の前記少なくとも一部が検出された前記第1映像上の検出位置が、前記表示領域の外側且つ前記検出領域の内側にあり、かつ前記移動体と前記検出対象との間の距離が減少する場合、前記距離の減少に対して前記移動体と前記検出対象との何れの寄与が大きいか判定し、前記移動体の寄与が大きいと判定した場合、前記検出対象に対応するマーカの少なくとも一部が前記第2映像上で第1方向に移動するように、前記マーカを前記第2映像に重畳して前記表示装置に表示させ、前記検出対象の寄与が大きいと判定した場合、前記マーカの前記少なくとも一部が前記第2映像上で第2方向に移動するように、前記マーカを前記第2映像に重畳して前記表示装置に表示させる、撮像装置。 An image sensor for generating a first image of the external area of the moving body;
A control unit for causing a display device to display a second image corresponding to a display area on the first image;
Equipped with
The control unit is
Detecting at least a part of a detection target in the detection area on the first image,
The distance between the detection position on the at least partially detected the first image of the detection target, Ri inside near the outer and the detection region of the display region, and the movable body and the detection target If it decreases, it is determined which contribution of the moving body and the detection target to the decrease of the distance is large, and when it is determined that the contribution of the moving body is large, the marker corresponding to the detection target When it is determined that the marker is superimposed on the second image and displayed on the display device so that at least a part of the marker moves in the first direction on the second image, and the contribution of the detection target is large, as at least a part of the marker is moved in the second direction on the second image, to be displayed on the display device by superimposing the marker before Symbol second image, the imaging apparatus.
移動体の外部領域を撮像した第1映像を生成する撮像装置と、
前記第1映像上の表示領域に対応する第2映像を前記表示装置に表示させる画像処理装置と、を備え、
前記画像処理装置は、
前記第1映像上の検出領域において検出対象の少なくとも一部を検出し、
前記検出対象の前記少なくとも一部が検出された前記第1映像上の検出位置が、前記表示領域の外側且つ前記検出領域の内側にあり、かつ前記移動体と前記検出対象との間の距離が減少する場合、前記距離の減少に対して前記移動体と前記検出対象との何れの寄与が大きいか判定し、前記移動体の寄与が大きいと判定した場合、前記検出対象に対応するマーカの少なくとも一部が前記第2映像上で第1方向に移動するように、前記マーカを前記第2映像に重畳して前記表示装置に表示させ、前記検出対象の寄与が大きいと判定した場合、前記マーカの前記少なくとも一部が前記第2映像上で第2方向に移動するように、前記マーカを前記第2映像に重畳して前記表示装置に表示させる、表示システム。 A display device,
An imaging device that generates a first video imaged of an external area of the moving body;
An image processing device which causes the display device to display a second video image corresponding to a display area on the first video image,
The image processing device,
Detecting at least a part of the detection target in the detection area on the first image,
The distance between the detection position on the at least partially detected the first image of the detection target, Ri inside near the outer and the detection region of the display region, and the movable body and the detection target If it decreases, it is determined which contribution of the moving body and the detection target to the decrease of the distance is large, and when it is determined that the contribution of the moving body is large, the marker corresponding to the detection target When it is determined that the marker is superimposed on the second image and displayed on the display device so that at least a part of the marker moves in the first direction on the second image, and the contribution of the detection target is large, as at least a part of the marker is moved in the second direction on the second image, to be displayed on the display device by superimposing the marker before Symbol second video display system.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016226334A JP6720063B2 (en) | 2016-11-21 | 2016-11-21 | Image processing device, imaging device, and display system |
| EP17871828.4A EP3544293B1 (en) | 2016-11-21 | 2017-11-21 | Image processing device, imaging device, and display system |
| US16/462,488 US11030468B2 (en) | 2016-11-21 | 2017-11-21 | Image processing apparatus |
| PCT/JP2017/041900 WO2018092919A1 (en) | 2016-11-21 | 2017-11-21 | Image processing device, imaging device, and display system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016226334A JP6720063B2 (en) | 2016-11-21 | 2016-11-21 | Image processing device, imaging device, and display system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018085582A JP2018085582A (en) | 2018-05-31 |
| JP6720063B2 true JP6720063B2 (en) | 2020-07-08 |
Family
ID=62237302
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016226334A Active JP6720063B2 (en) | 2016-11-21 | 2016-11-21 | Image processing device, imaging device, and display system |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6720063B2 (en) |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009040107A (en) * | 2007-08-06 | 2009-02-26 | Denso Corp | Image display control device and image display control system |
| CN102782740B (en) * | 2010-03-01 | 2015-04-15 | 本田技研工业株式会社 | Surrounding area monitoring device for vehicle |
| JP5861449B2 (en) * | 2011-12-26 | 2016-02-16 | アイシン精機株式会社 | Obstacle alarm device |
| JP2015008453A (en) * | 2013-05-29 | 2015-01-15 | 京セラ株式会社 | Camera device and warning method |
| JP6232759B2 (en) * | 2013-06-07 | 2017-11-22 | ソニー株式会社 | Information processing apparatus, approaching object notification method, and program |
-
2016
- 2016-11-21 JP JP2016226334A patent/JP6720063B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018085582A (en) | 2018-05-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11961162B2 (en) | Imaging apparatus, image processing apparatus, display system, and vehicle | |
| US10930070B2 (en) | Periphery monitoring device | |
| JP6930971B2 (en) | Display devices, display systems, and mobiles | |
| JP6762863B2 (en) | Imaging equipment, image processing equipment, display systems, and vehicles | |
| JP6626817B2 (en) | Camera monitor system, image processing device, vehicle, and image processing method | |
| JP6781035B2 (en) | Imaging equipment, image processing equipment, display systems, and vehicles | |
| WO2018092919A1 (en) | Image processing device, imaging device, and display system | |
| KR102023863B1 (en) | Display method around moving object and display device around moving object | |
| JP2018085584A (en) | Image processing apparatus, imaging apparatus, and display system | |
| JP6720063B2 (en) | Image processing device, imaging device, and display system | |
| JP6712942B2 (en) | Image processing device, imaging device, and display system | |
| JP2021007255A (en) | Imaging device, image processing apparatus, display system, and vehicle | |
| JP6759072B2 (en) | Image processing equipment, imaging equipment, and display system | |
| JP7296490B2 (en) | Display control device and vehicle | |
| JP6974564B2 (en) | Display control device | |
| JP7007438B2 (en) | Imaging equipment, image processing equipment, display equipment, display systems, and vehicles |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200317 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200512 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200602 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200617 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6720063 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |