JP6668239B2 - 数を減らした装着センサセットを用いたモーショントラッキング - Google Patents
数を減らした装着センサセットを用いたモーショントラッキング Download PDFInfo
- Publication number
- JP6668239B2 JP6668239B2 JP2016536188A JP2016536188A JP6668239B2 JP 6668239 B2 JP6668239 B2 JP 6668239B2 JP 2016536188 A JP2016536188 A JP 2016536188A JP 2016536188 A JP2016536188 A JP 2016536188A JP 6668239 B2 JP6668239 B2 JP 6668239B2
- Authority
- JP
- Japan
- Prior art keywords
- segment
- dimensional
- dimensional position
- tracking module
- sensing unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000033001 locomotion Effects 0.000 title claims description 57
- 238000000034 method Methods 0.000 claims description 52
- 230000001133 acceleration Effects 0.000 claims description 22
- 238000005259 measurement Methods 0.000 claims description 19
- 238000001514 detection method Methods 0.000 claims description 11
- 238000004891 communication Methods 0.000 claims description 7
- 230000004927 fusion Effects 0.000 claims description 5
- 230000001360 synchronised effect Effects 0.000 claims description 3
- 230000000875 corresponding effect Effects 0.000 description 21
- 230000036544 posture Effects 0.000 description 15
- 238000013459 approach Methods 0.000 description 11
- 230000003287 optical effect Effects 0.000 description 9
- 238000005516 engineering process Methods 0.000 description 6
- 230000009471 action Effects 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 210000000707 wrist Anatomy 0.000 description 5
- 210000003423 ankle Anatomy 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 230000005484 gravity Effects 0.000 description 4
- 238000012549 training Methods 0.000 description 4
- 238000004422 calculation algorithm Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000010354 integration Effects 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 230000007704 transition Effects 0.000 description 3
- 239000013598 vector Substances 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 230000007774 longterm Effects 0.000 description 2
- 238000010801 machine learning Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000035945 sensitivity Effects 0.000 description 2
- 238000013519 translation Methods 0.000 description 2
- 230000002411 adverse Effects 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000002457 bidirectional effect Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000007635 classification algorithm Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 210000002683 foot Anatomy 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000007500 overflow downdraw method Methods 0.000 description 1
- 238000012805 post-processing Methods 0.000 description 1
- 230000002035 prolonged effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 229920006395 saturated elastomer Polymers 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 238000010561 standard procedure Methods 0.000 description 1
Images




Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
- A61B5/1113—Local tracking of patients, e.g. in a hospital or private home
- A61B5/1114—Tracking parts of the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
- A61B5/1123—Discriminating type of movement, e.g. walking or running
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S11/00—Systems for determining distance or velocity not using reflection or reradiation
- G01S11/14—Systems for determining distance or velocity not using reflection or reradiation using ultrasonic, sonic, or infrasonic waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/74—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems
Description

Claims (31)
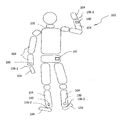
- 複数の連結されたセグメントを有する移動体のモーショントラッキングシステムであって、
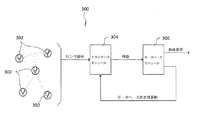
前記セグメントの一部に結合され、当該セグメントの1つ以上の特徴に対応するセンサ信号を生成するように構成された検知ユニットと、
前記検知ユニットと通信しており、前記センサ信号をもとに少なくとも前記セグメントの3次元方向及び3次元位置を決定するように構成されたトラッキングモジュールと、
前記トラッキングモジュールと通信しており、前記移動体の姿勢を前記セグメントの前記3次元方向及び前記3次元位置と関連付けるように構成されたデータベースモジュールを備えたシステム。 - 前記データベースモジュールは、前記セグメントの前記3次元方向及び前記3次元位置と関連付けられた前記移動体の前記姿勢を前記トラッキングモジュールに送信するように構成された請求項1記載のシステム。
- 前記検知ユニットは、3D加速度計、3Dジャイロスコープ及び3D磁力計の1つ以上を含む請求項1記載のシステム。
- 前記検知ユニットは、さらに圧力センサ及び測距ユニットを備え、前記トラッキングモジュールは、一対または複数対の前記検知ユニット間の相対距離を決定するように構成された請求項1記載のシステム。
- 前記トラッキングモジュールは、ユーザ身体上に、またはユーザ身体に極めて近接して設けられるスマートフォン、タブレット、パーソナルコンピュータまたはコンソールゲーム機のいずれかにおいて実装される請求項1記載のシステム。
- 前記検知ユニットは1つ以上の3D加速度計を含み、前記トラッキングモジュールは、前記3D加速度計からのセンサ信号から重力要素を減じたものを二重積分することにより前記3次元位置を予測するように構成された請求項1記載のシステム。
- 前記トラッキングモジュールは、前記3次元方向及び前記3次元位置の1つ以上を、同じくデータベースモジュールに送信される重みと関連付けるように構成された請求項1記載のシステム。
- 前記トラッキングモジュールは、各セグメントの前記3次元方向、前記3次元位置及び3次元加速度を、基準セグメントの3次元方向、3次元位置及び3次元加速度に対して決定するように構成された請求項1記載のシステム。
- 前記トラッキングモジュールは、前記セグメントの付加的な特徴を算出し、前記移動体と所定の周囲環境との間の接触を検出できるように前記付加的な特徴を前記データベースモジュールに送信するように構成され、前記付加的な特徴は、前記検知ユニットと関連する前記セグメントの1つ以上についての速度、加速度及び位置の1つ以上を含み、前記データベースモジュールは、前記移動体と前記所定の周囲環境との間の検出された接触をもとに前記移動体の速度測定値及び位置測定値の1つ以上を更新するように構成された請求項1記載のシステム。
- 複数の連結されたセグメントを有する移動体のモーショントラッキングを、前記セグメントの1つ以上に結合された検知ユニットを用いて行う方法であって、
前記検知ユニットから1つ以上のセンサ信号を受信すること、
前記センサ信号をもとにトラッキングモジュールにおいて前記セグメントの3次元方向を推定すること、
前記センサ信号をもとに前記トラッキングモジュールにおいて前記セグメントの3次元位置を予測すること、
前記セグメントの前記推定された3次元方向及び前記セグメントの前記予測された3次元位置をデータベースモジュールに送信すること、
前記データベースモジュールにおいて、前記セグメントを含む前記移動体の姿勢を、前記トラッキングモジュールから送信された前記セグメントの前記3次元方向及び前記3次元位置と関連付けること、
前記移動体の前記関連付けられた姿勢を前記データベースモジュールから前記トラッキングモジュールに送信し、前記トラッキングモジュールにおいてこの姿勢をもとに前記セグメントの前記予測された3次元位置を補正することを含む方法。 - 前記セグメントの前記3次元位置は、先に予測された3次元位置を用いて予測される請求項10記載の方法。
- 前記移動体は、関節により拘束された一組の連結セグメントとしてモデル化される解剖学的身体である請求項10記載の方法。
- 前記検知ユニットは、少なくとも、3Dジャイロスコープ、3D加速度計及び3D磁界センサの1つ以上を含む請求項10記載の方法。
- 前記セグメントの前記3次元方向は、前記検知ユニットにより生成される前記センサ信号に適用されるセンサ・フュージョン手段により算出される請求項10記載の方法。
- 前記検知ユニットは1つ以上の3D加速度計を含み、前記検知ユニットの前記3次元位置は、前記3D加速度計により生成されるセンサ信号から重力要素を減じたものを二重積分することにより予測される請求項10記載の方法。
- 前記3次元方向及び前記3次元位置の1つ以上が重みと関連付けられ、当該重みは前記データベースモジュールに送信される請求項10記載の方法。
- 前記移動体の前記姿勢は、前記セグメントの前記3次元位置に関して前記データベースモジュールから前記トラッキングモジュールに送信される請求項10記載の方法。
- 各セグメントの前記3次元方向、前記3次元位置及び3次元加速度は、基準セグメントの3次元方向、3次元位置及び3次元加速度に対して決定される請求項10記載の方法。
- 前記トラッキングモジュールにおいて前記セグメントの付加的な特徴を算出すること、
前記付加的な特徴は、前記検知ユニットと関連する前記セグメントの1つ以上についての速度、加速度及び位置の1つ以上を含み、前記移動体と所定の周囲環境との間の接触を検出できるように前記付加的な特徴を前記データベースモジュールに送信すること、
前記移動体と前記所定の周囲環境との間の検出された接触をもとに前記移動体の速度測定値及び位置測定値の1つ以上を更新することをさらに含む請求項10記載の方法。 - 複数の連結されたセグメントを有する移動体のモーションキャプチャを、前記セグメントの1つ以上に結合された検知ユニットを用いて行う方法であって、
前記検知ユニットから1つ以上のセンサ信号を受信すること、
前記センサ信号をもとにトラッキングモジュールにおいて前記セグメントの3次元方向を推定すること、
前記センサ信号をもとに、前記トラッキングモジュールにおいて前記セグメントの3次元位置を先に予測された3次元位置を用いて予測すること、
前記セグメントの前記推定された3次元方向及び前記セグメントの前記予測された3次元位置をデータベースモジュールに送信すること、
前記データベースモジュールにおいて、前記セグメントを含む前記移動体の姿勢を、前記トラッキングモジュールから送信された前記セグメントの前記3次元方向及び前記3次元位置と関連付けること、
前記移動体の前記関連付けられた姿勢を前記データベースモジュールから前記トラッキングモジュールに送信し、前記トラッキングモジュールにおいてこの姿勢をもとに前記セグメントの前記予測された3次元位置を補正することを含む方法。 - 前記移動体は、関節により拘束される一組の連結セグメントとしてモデル化される解剖学的身体である請求項20記載の方法。
- 前記検知ユニットは、少なくとも、3Dジャイロスコープ、3D加速度計、3D磁界センサ、圧力センサ及び、一対または複数対の検知ユニット間の相対距離を少なくとも間接的に測定可能な測距手段の1つ以上を含む請求項20記載の方法。
- 前記検知ユニット間の相対距離は、超広帯域(UWB)無線信号及び音響信号の一方を用いた手段により得られる請求項20記載の方法。
- 前記検知ユニットの少なくとも1つは、無線通信プロトコルを用いて同期された音響センサを含む請求項20記載の方法。
- 前記セグメントの前記3次元方向は、前記検知ユニットにより生成される前記センサ信号に適用されるセンサ・フュージョン手段により算出される請求項20記載の方法。
- 前記検知ユニットは1つ以上の3D加速度計を含み、前記検知ユニットの前記3次元位置は、前記3D加速度計により生成されるセンサ信号から重力要素を減じたものを二重積分することにより予測される請求項20記載の方法。
- 前記検知ユニットの前記3次元位置は、前記検知ユニットにより生成される前記センサ信号に適用されるセンサ・フュージョン手段により補正される請求項20記載の方法。
- 前記3次元方向及び前記3次元位置の1つ以上が重みと関連付けられ、当該重みは前記データベースモジュールに送信される請求項20記載の方法。
- 前記移動体の前記姿勢は、前記セグメントの前記3次元位置に関して前記データベースモジュールから前記トラッキングモジュールに送信される請求項20記載の方法。
- 各セグメントの前記3次元方向、前記3次元位置及び3次元加速度は、基準セグメントの3次元方向、3次元位置及び3次元加速度に対して決定される請求項20記載の方法。
- 前記トラッキングモジュールにおいて前記セグメントの付加的な特徴を算出すること、
前記付加的な特徴は、前記検知ユニットと関連する前記セグメントの1つ以上についての速度、加速度及び位置の1つ以上を含み、前記移動体と所定の周囲環境との間の接触を検出できるように前記付加的な特徴を前記データベースモジュールに送信すること、
前記移動体と前記所定の周囲環境との間の検出された接触をもとに前記移動体の速度測定値及び位置測定値の1つ以上を更新することをさらに含む請求項20記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/151,409 | 2014-01-09 | ||
| US14/151,409 US10415975B2 (en) | 2014-01-09 | 2014-01-09 | Motion tracking with reduced on-body sensors set |
| PCT/IB2015/000700 WO2015114468A2 (en) | 2014-01-09 | 2015-01-09 | Motion tracking with reduced on-body sensors set |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017511906A JP2017511906A (ja) | 2017-04-27 |
| JP6668239B2 true JP6668239B2 (ja) | 2020-03-18 |
Family
ID=53491633
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016536188A Active JP6668239B2 (ja) | 2014-01-09 | 2015-01-09 | 数を減らした装着センサセットを用いたモーショントラッキング |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10415975B2 (ja) |
| EP (1) | EP3063499A2 (ja) |
| JP (1) | JP6668239B2 (ja) |
| WO (1) | WO2015114468A2 (ja) |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20150089371A (ko) * | 2014-01-27 | 2015-08-05 | 한국전자통신연구원 | 인체 동작 분석 장치 |
| US9926832B2 (en) | 2015-04-24 | 2018-03-27 | Briggs & Stratton Corporation | Reverse fin cooling fan |
| US20180220966A1 (en) * | 2015-08-06 | 2018-08-09 | Upright Technologies Ltd. | Body movement feedback system and method |
| US10222450B2 (en) * | 2015-10-12 | 2019-03-05 | Xsens Holding B.V. | Integration of inertial tracking and position aiding for motion capture |
| US20180070864A1 (en) * | 2016-06-02 | 2018-03-15 | Matthew Schuster | Methods and devices for assessing a captured motion |
| EP3474235A4 (en) * | 2016-06-16 | 2019-07-03 | Sony Corporation | INFORMATION PROCESSING DEVICE, INFORMATION PROCESSING METHOD AND STORAGE MEDIUM |
| FR3054048B1 (fr) | 2016-07-13 | 2018-08-24 | Commissariat Energie Atomique | Procede et systeme de commande hierarchique en temps reel d'une structure articulee exploitant un nombre limite de capteurs de mouvement |
| CN106073794A (zh) * | 2016-08-23 | 2016-11-09 | 吉林大学 | 一种可穿戴的下肢康复锻炼步态监测分析设备 |
| WO2018081795A1 (en) | 2016-10-31 | 2018-05-03 | Zipline Medical, Inc. | Systems and methods for monitoring physical therapy of the knee and other joints |
| US20180342109A1 (en) * | 2017-05-25 | 2018-11-29 | Thomson Licensing | Determining full-body pose for a virtual reality environment |
| US10521947B2 (en) * | 2017-09-29 | 2019-12-31 | Sony Interactive Entertainment Inc. | Rendering of virtual hand pose based on detected hand input |
| KR102509678B1 (ko) * | 2017-12-29 | 2023-03-14 | 프라운호퍼 게젤샤프트 쭈르 푀르데룽 데어 안겐반텐 포르슝 에. 베. | 대상물 모션 예측 방법, 모션 모델 보정 방법, 기정 양 도출 방법 및 가상 현실 뷰 생성 방법 |
| JP2019138812A (ja) * | 2018-02-13 | 2019-08-22 | 日本電信電話株式会社 | 距離測定装置、距離測定システム及び距離測定方法 |
| US11660526B2 (en) * | 2018-03-01 | 2023-05-30 | Sony Interactive Entertainment Inc. | Estimation apparatus, estimation method, and program |
| US11726549B2 (en) * | 2018-04-17 | 2023-08-15 | Sony Corporation | Program, information processor, and information processing method |
| US11054638B2 (en) | 2018-06-13 | 2021-07-06 | Reavire, Inc. | Tracking pointing direction of device |
| IT201800006950A1 (it) | 2018-07-05 | 2020-01-05 | Sistema di rilevazione e monitoraggio cinematico di movimenti corporei in acqua, e relativo metodo | |
| GB2574074B (en) | 2018-07-27 | 2020-05-20 | Mclaren Applied Tech Ltd | Time synchronisation |
| US20200097066A1 (en) * | 2018-09-20 | 2020-03-26 | XRSpace CO., LTD. | Tracking Method and Tracking System Using the Same |
| US10817047B2 (en) | 2018-09-19 | 2020-10-27 | XRSpace CO., LTD. | Tracking system and tacking method using the same |
| WO2020142047A1 (en) * | 2018-12-31 | 2020-07-09 | Havelsan Hava Elektronik Sanayi Ve Ticaret Anonim Sirketi | System for detecting, analysing and following movement |
| US11107242B2 (en) * | 2019-01-11 | 2021-08-31 | Microsoft Technology Licensing, Llc | Detecting pose using floating keypoint(s) |
| US11460914B2 (en) | 2019-08-01 | 2022-10-04 | Brave Virtual Worlds, Inc. | Modular sensor apparatus and system to capture motion and location of a human body, body part, limb, or joint |
| GB2588236B (en) | 2019-10-18 | 2024-03-20 | Mclaren Applied Ltd | Gyroscope bias estimation |
| EP3832435A1 (en) * | 2019-12-06 | 2021-06-09 | XRSpace CO., LTD. | Motion tracking system and method |
| KR102421310B1 (ko) * | 2020-07-21 | 2022-07-14 | 한국해양대학교 산학협력단 | 파킨슨 환자의 재활을 위한 스마트 걸음 보조 장치 및 방법 |
| US11696704B1 (en) | 2020-08-31 | 2023-07-11 | Barron Associates, Inc. | System, device and method for tracking the human hand for upper extremity therapy |
| US11651625B2 (en) | 2020-09-17 | 2023-05-16 | Meta Platforms Technologies, Llc | Systems and methods for predicting elbow joint poses |
| US11507179B2 (en) * | 2020-09-17 | 2022-11-22 | Meta Platforms Technologies, Llc | Systems and methods for predicting lower body poses |
| US11887259B2 (en) | 2021-01-25 | 2024-01-30 | Walker L. Sherk | Method, system, and apparatus for full-body tracking with magnetic fields in virtual reality and augmented reality applications |
| CN114562993A (zh) * | 2022-02-28 | 2022-05-31 | 联想(北京)有限公司 | 一种轨迹处理方法、装置及电子设备 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2915846B2 (ja) * | 1996-06-28 | 1999-07-05 | 株式会社エイ・ティ・アール通信システム研究所 | 3次元映像作成装置 |
| JP3862348B2 (ja) * | 1997-03-19 | 2006-12-27 | 東京電力株式会社 | モーションキャプチャシステム |
| JP3668663B2 (ja) * | 2000-02-21 | 2005-07-06 | 日本電信電話株式会社 | 仮想空間における動作入力方法および装置およびその動作入力プログラムを記録した記録媒体 |
| US6984208B2 (en) * | 2002-08-01 | 2006-01-10 | The Hong Kong Polytechnic University | Method and apparatus for sensing body gesture, posture and movement |
| NL1030440C2 (nl) | 2005-11-16 | 2007-05-21 | Univ Twente | Bewegingsvolgsysteem. |
| EP1970005B1 (en) | 2007-03-15 | 2012-10-03 | Xsens Holding B.V. | A system and a method for motion tracking using a calibration unit |
| JP2008307207A (ja) * | 2007-06-14 | 2008-12-25 | Advanced Telecommunication Research Institute International | 動作計測装置 |
| KR101483713B1 (ko) | 2008-06-30 | 2015-01-16 | 삼성전자 주식회사 | 모션 캡쳐 장치 및 모션 캡쳐 방법 |
| WO2010027015A1 (ja) * | 2008-09-05 | 2010-03-11 | 国立大学法人東京大学 | モーションキャプチャ装置 |
| GB0901020D0 (en) | 2009-01-21 | 2009-03-04 | Birmingham City University | A motion capture apparatus |
| JP2010176380A (ja) * | 2009-01-29 | 2010-08-12 | Sony Corp | 情報処理装置および方法、プログラム、並びに記録媒体 |
| EP2320288B1 (en) | 2009-11-06 | 2016-12-21 | Xsens Holding B.V. | A method and a system for enabling a wireless communication between a master unit and a sensor unit |
| US9436286B2 (en) * | 2011-01-05 | 2016-09-06 | Qualcomm Incorporated | Method and apparatus for tracking orientation of a user |
-
2014
- 2014-01-09 US US14/151,409 patent/US10415975B2/en active Active
-
2015
- 2015-01-09 WO PCT/IB2015/000700 patent/WO2015114468A2/en active Application Filing
- 2015-01-09 JP JP2016536188A patent/JP6668239B2/ja active Active
- 2015-01-09 EP EP15732329.6A patent/EP3063499A2/en not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017511906A (ja) | 2017-04-27 |
| WO2015114468A3 (en) | 2015-12-17 |
| US20150192413A1 (en) | 2015-07-09 |
| US10415975B2 (en) | 2019-09-17 |
| EP3063499A2 (en) | 2016-09-07 |
| WO2015114468A2 (en) | 2015-08-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6668239B2 (ja) | 数を減らした装着センサセットを用いたモーショントラッキング | |
| EP1959831B1 (en) | Motion tracking system | |
| CN110133582B (zh) | 补偿电磁跟踪系统中的畸变 | |
| US8203487B2 (en) | Tightly coupled UWB/IMU pose estimation system and method | |
| US9316513B2 (en) | System and method for calibrating sensors for different operating environments | |
| KR101732835B1 (ko) | 관성 장치, 방법, 및 프로그램 | |
| CN106662443B (zh) | 用于垂直轨迹确定的方法和系统 | |
| JP4989660B2 (ja) | モーションキャプチャー装置およびそれに係る方法 | |
| US9599634B2 (en) | System and method for calibrating inertial measurement units | |
| JP2010534316A (ja) | 対象物の動きを捕捉するシステム及び方法 | |
| US11698687B2 (en) | Electronic device for use in motion detection and method for obtaining resultant deviation thereof | |
| CN101855517A (zh) | 目标的方位测量 | |
| US20150241245A1 (en) | Orientation estimation utilizing a plurality of adaptive filters | |
| WO2015146048A1 (ja) | 誤差推定方法、運動解析方法、誤差推定装置、及びプログラム | |
| TW201915510A (zh) | 在電磁位置追蹤系統中校正場變形 | |
| JP5233000B2 (ja) | 動き測定装置 | |
| US20150241244A1 (en) | Low-power orientation estimation | |
| Montorsi et al. | Design and implementation of an inertial navigation system for pedestrians based on a low-cost MEMS IMU | |
| KR101301462B1 (ko) | 저가형 관성 센서를 이용한 보행자 관성 항법 장치 및 그 항법 | |
| Vasilyev et al. | Inertial and time-of-arrival ranging sensor fusion | |
| TWI680382B (zh) | 電子裝置及其姿態校正方法 | |
| TWI494797B (zh) | 用於動作感測的電子裝置及取得其結果偏差的方法 | |
| KR20110056185A (ko) | 리 대수 및 칼만 필터를 이용한 자세 추정 방법 및 장치 | |
| WO2019176150A1 (ja) | 位置推定装置、位置推定方法及びプログラム | |
| CN110579212B (zh) | 室内定位方法及装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171212 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190117 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190213 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20190508 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20190705 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190813 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200204 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200226 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6668239 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |