JP5233000B2 - 動き測定装置 - Google Patents
動き測定装置 Download PDFInfo
- Publication number
- JP5233000B2 JP5233000B2 JP2007302056A JP2007302056A JP5233000B2 JP 5233000 B2 JP5233000 B2 JP 5233000B2 JP 2007302056 A JP2007302056 A JP 2007302056A JP 2007302056 A JP2007302056 A JP 2007302056A JP 5233000 B2 JP5233000 B2 JP 5233000B2
- Authority
- JP
- Japan
- Prior art keywords
- acceleration
- condition
- sensor unit
- absolute value
- angular velocity
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000001133 acceleration Effects 0.000 claims description 214
- 238000005259 measurement Methods 0.000 claims description 66
- 230000010354 integration Effects 0.000 claims description 42
- 238000000034 method Methods 0.000 claims description 31
- 238000004364 calculation method Methods 0.000 claims description 30
- 230000008569 process Effects 0.000 claims description 22
- 238000006243 chemical reaction Methods 0.000 claims description 15
- 238000012937 correction Methods 0.000 description 11
- 238000012545 processing Methods 0.000 description 11
- 238000004891 communication Methods 0.000 description 7
- 230000008859 change Effects 0.000 description 6
- 230000005484 gravity Effects 0.000 description 6
- 230000007423 decrease Effects 0.000 description 5
- 230000001419 dependent effect Effects 0.000 description 5
- 238000013500 data storage Methods 0.000 description 3
- 238000003745 diagnosis Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- QBWCMBCROVPCKQ-UHFFFAOYSA-N chlorous acid Chemical compound OCl=O QBWCMBCROVPCKQ-UHFFFAOYSA-N 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 238000000554 physical therapy Methods 0.000 description 2
- 238000009825 accumulation Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images









Landscapes
- Length Measuring Devices With Unspecified Measuring Means (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
Description
Vicon(http://www.crescentvideo.co.jp/vicon/) Polhemus(http://www.polhemus.com/) NECトーキン製3Dモーションセンサ(http://www.nec-tokin.com/product/3d/index.html) トキメック製VSAS−2GM(http://www.tokimec.co.jp/sensor/vsas/index.html) クレアクト社InterCube2/3(http://www.creact.co.jp/jpn/intersense/inertiacube.html)
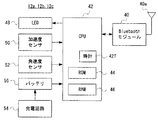
12a〜12c …センサユニット
20,40 …Bluetoothモジュール
22,42 …CPU
22T,42T …時計
26,56 …RAM
50 …加速度センサ
52 …角速度センサ
Claims (12)
- 角速度センサおよび加速度センサから角速度および加速度をそれぞれ繰り返し取得する取得手段、
前記取得手段によって取得された角速度を積算する積算手段、および
前記積算手段の積算結果を前記取得手段によって取得された加速度が加速度条件を満足したときリセットするリセット手段を備え、
前記取得手段によって取得された加速度は複数の加速度成分を含み、
前記取得手段によって取得された加速度の絶対値を算出する算出手段をさらに備え、
前記加速度条件は、加速度成分に関する加速度成分条件、および加速度の絶対値に関する加速度絶対値条件を含み、
前記リセット手段は、前記取得手段によって取得された加速度に含まれる特定の加速度成分が前記加速度成分条件を満足し、かつ前記算出手段の算出結果が前記加速度絶対値条件を満足したときリセットを行う、動き測定装置。 - 前記特定の加速度成分は重力方向の加速度成分であり、前記加速度条件は重力方向の加速度成分が所定範囲で一定時間安定するという条件を含み、前記加速度絶対値条件は加速度の絶対値が所定範囲で一定時間安定するという条件を含む、請求項1記載の動き測定装置。
- 前記取得手段によって取得された角速度は複数の角速度成分を含み、
前記積算手段は角速度成分毎に積算を行う、請求項1または2記載の動き測定装置。 - 角速度および加速度を繰り返し計測する第1センサユニット、および
少なくとも前記第1センサユニットの計測結果に基づいて動きを測定する動き測定装置を備え、
前記動き測定装置は、
前記第1センサユニットによって計測された角速度を積算する第1積算手段、および
前記第1積算手段の積算結果を前記第1センサユニットによって計測された加速度が加速度条件を満足したときリセットする第1リセット手段を含み、
前記第1センサユニットによって計測された加速度は複数の加速度成分を含み、
前記動き測定装置は、前記第1センサユニットによって計測された加速度の絶対値を算出する第1算出手段をさらに含み、
前記加速度条件は、加速度成分に関する加速度成分条件、および加速度の絶対値に関する加速度絶対値条件を含み、
前記第1リセット手段は、前記第1センサユニットによって計測された加速度に含まれる特定の加速度成分が前記加速度成分条件を満足し、かつ前記第1算出手段の算出結果が前記加速度絶対値条件を満足したときリセットを行う、動き測定システム。 - 前記特定の加速度成分は重力方向の加速度成分であり、前記加速度条件は重力方向の加速度成分が所定範囲で一定時間安定するという条件を含み、前記加速度絶対値条件は加速度の絶対値が所定範囲で一定時間安定するという条件を含む、請求項4記載の動き測定装置。
- 角速度および加速度を繰り返し計測する第2センサユニットをさらに備え、
前記動き測定装置は、
前記第2センサユニットによって計測された角速度を積算する第2積算手段、および
前記第2積算手段の積算結果を前記第2センサユニットによって計測された加速度が加速度条件を満足したときリセットする第2リセット手段をさらに含み、
前記第2センサユニットによって計測された加速度は複数の加速度成分を含み、
前記動き測定装置は、前記第2センサユニットによって計測された加速度の絶対値を算出する第2算出手段をさらに含む、請求項4記載の動き測定システム。 - 前記加速度条件は、加速度成分に関する加速度成分条件、および加速度の絶対値に関する加速度絶対値条件を含み、
前記第2リセット手段は、前記第2センサユニットによって計測された加速度に含まれる特定の加速度成分が前記加速度成分条件を満足し、かつ前記第2算出手段の算出結果が前記加速度絶対値条件を満足したときリセットを行う、請求項6記載の動き測定システム。 - 前記動き測定装置は、前記第1センサユニットによって計測された角速度および前記第2センサユニットによって計測された角速度の少なくとも一方に座標系変換処理を施す座標系変換手段をさらに備える、請求項6記載の動き測定システム。
- 前記第1センサユニットおよび前記第2センサユニットの各々は計測結果に共通のタイムスタンプを付与し、
前記動き測定装置は少なくとも前記第1センサユニットの計測結果および前記第2センサユニットの計測結果に基づいて測定を行う、請求項8記載の動き測定システム。 - 前記第1センサユニットおよび前記第2センサユニットの各々と前記動き測定装置とは計測結果を無線で送受信する、請求項4〜9のいずれかに記載の動き測定装置。
- 動き測定装置のプロセッサに、
角速度センサおよび加速度センサから角速度および加速度をそれぞれ繰り返し取得する取得ステップ、
前記取得ステップによって取得された角速度を積算する積算ステップ、および
前記積算ステップの積算結果を前記取得ステップによって取得された加速度が加速度条件を満足したときリセットするリセットステップを実行させ、
前記取得ステップによって取得された加速度は複数の加速度成分を含み、
前記プロセッサに前記取得ステップによって取得された加速度の絶対値を算出する算出ステップをさらに実行させ、
前記加速度条件は、加速度成分に関する加速度成分条件、および加速度の絶対値に関する加速度絶対値条件を含み、
前記リセットステップは、前記取得ステップによって取得された加速度に含まれる特定の加速度成分が前記加速度成分条件を満足し、かつ前記算出ステップの算出結果が前記加速度絶対値条件を満足したときリセットを行う、制御プログラム。 - 前記特定の加速度成分は重力方向の加速度成分であり、前記加速度条件は重力方向の加速度成分が所定範囲で一定時間安定するという条件を含み、前記加速度絶対値条件は加速度の絶対値が所定範囲で一定時間安定するという条件を含む、請求項11記載の動き測定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007302056A JP5233000B2 (ja) | 2007-11-21 | 2007-11-21 | 動き測定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007302056A JP5233000B2 (ja) | 2007-11-21 | 2007-11-21 | 動き測定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009125229A JP2009125229A (ja) | 2009-06-11 |
| JP5233000B2 true JP5233000B2 (ja) | 2013-07-10 |
Family
ID=40816742
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007302056A Active JP5233000B2 (ja) | 2007-11-21 | 2007-11-21 | 動き測定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5233000B2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011033489A (ja) * | 2009-08-03 | 2011-02-17 | Aichi Micro Intelligent Corp | モーションキャプチャ用のマーカ |
| WO2011036774A1 (ja) * | 2009-09-25 | 2011-03-31 | 富士通株式会社 | 軌跡生成プログラムおよび軌跡生成装置 |
| US10429961B2 (en) | 2012-05-25 | 2019-10-01 | Nintendo Co., Ltd. | Controller device, information processing system, and information processing method |
| WO2013175630A1 (ja) * | 2012-05-25 | 2013-11-28 | 任天堂株式会社 | 操作装置、情報処理システム、および通信方法 |
| EP2730995B1 (en) | 2012-05-25 | 2016-11-30 | Nintendo Co., Ltd. | Controller device, information processing system, and communication method |
| CN102764130B (zh) * | 2012-07-04 | 2014-02-05 | 北京理工大学 | 一种用于测量手部运动速度的非接触式静电探测方法 |
| CN106125146B (zh) * | 2016-07-04 | 2018-09-04 | 北京理工大学 | 一种移动电荷源实时位置探测方法 |
| CN106054256B (zh) * | 2016-07-04 | 2018-09-04 | 北京理工大学 | 一种移动电荷源运动速度和方向的探测方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4007899B2 (ja) * | 2002-11-07 | 2007-11-14 | オリンパス株式会社 | 運動検出装置 |
| JP2004264060A (ja) * | 2003-02-14 | 2004-09-24 | Akebono Brake Ind Co Ltd | 姿勢の検出装置における誤差補正方法及びそれを利用した動作計測装置 |
| JP4913316B2 (ja) * | 2003-07-15 | 2012-04-11 | 旭化成エレクトロニクス株式会社 | 歩数演算装置 |
| JP4243684B2 (ja) * | 2003-10-07 | 2009-03-25 | 独立行政法人産業技術総合研究所 | 歩行動作検出処理装置および歩行動作検出処理方法 |
-
2007
- 2007-11-21 JP JP2007302056A patent/JP5233000B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009125229A (ja) | 2009-06-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5233000B2 (ja) | 動き測定装置 | |
| US10679360B2 (en) | Mixed motion capture system and method | |
| JP6668239B2 (ja) | 数を減らした装着センサセットを用いたモーショントラッキング | |
| KR101751760B1 (ko) | 하지 관절 각도를 이용한 보행 인자 추정 방법 | |
| Bo et al. | Joint angle estimation in rehabilitation with inertial sensors and its integration with Kinect | |
| JP4673342B2 (ja) | 運動情報の決定方法、及び腕時計式装置 | |
| US9599634B2 (en) | System and method for calibrating inertial measurement units | |
| US10760904B2 (en) | Wearable device, posture measurement method, and non-transitory recording medium | |
| WO2015146046A1 (ja) | 相関係数補正方法、運動解析方法、相関係数補正装置及びプログラム | |
| US9733729B2 (en) | Method and device for sensing orientation of an object in space in a fixed frame of reference | |
| JP6648515B2 (ja) | 電子機器及びその角速度取得方法、角速度取得プログラム | |
| TW201425878A (zh) | 多姿態步距校正定位系統與方法 | |
| WO2008068542A1 (en) | Auto-calibration method for sensors and auto-calibrating sensor arrangement | |
| KR20160025687A (ko) | 웨어러블 워치 및 그것의 디스플레이 방법 | |
| CN110036259B (zh) | 一种姿态矩阵的计算方法及设备 | |
| US20220409097A1 (en) | Joint Axis Direction Estimation | |
| WO2015146048A1 (ja) | 誤差推定方法、運動解析方法、誤差推定装置、及びプログラム | |
| KR20120131553A (ko) | 동작 추적 방법. | |
| KR102353762B1 (ko) | 사용자의 머리에 착용되는 자세 센서의 전후 좌우 방향 결정 방법 | |
| JP2016043260A (ja) | 運動解析装置、運動解析方法、および運動解析システム | |
| JP5870656B2 (ja) | 軌跡演算装置および軌跡演算方法 | |
| Alcala et al. | Xsens DOT wearable sensor platform white paper | |
| WO2021006812A1 (en) | System and method for motion analysis | |
| JP5691387B2 (ja) | 歩行計測装置、歩行計測方法およびプログラム | |
| JP2015188605A (ja) | 誤差推定方法、運動解析方法、誤差推定装置及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100922 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120524 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120529 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120711 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120918 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121009 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130226 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130301 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5233000 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160405 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |