JP6654893B2 - Confocal displacement meter - Google Patents
Confocal displacement meter Download PDFInfo
- Publication number
- JP6654893B2 JP6654893B2 JP2015254805A JP2015254805A JP6654893B2 JP 6654893 B2 JP6654893 B2 JP 6654893B2 JP 2015254805 A JP2015254805 A JP 2015254805A JP 2015254805 A JP2015254805 A JP 2015254805A JP 6654893 B2 JP6654893 B2 JP 6654893B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- unit
- wavelength
- measurement
- sequentially
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




















Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Measurement Of Optical Distance (AREA)
Description
本発明は、広い波長帯域の光を用いた共焦点変位計に関する。 The present invention relates to a confocal displacement meter using light in a wide wavelength band.
計測対象物の表面の変位を非接触方式により計測する装置として、共焦点変位計が知られている。例えば、特許文献1には、計測対象物の表面の変位として所定の基準位置から計測対象物までの距離を計測するクロマティックポイントセンサ(CPS)システムが記載されている。特許文献1のCPSは、2個の共焦点系の光路を有する。複数波長の光が各光路に入力され、いずれかの光路を通過した光が選択的に計測対象物に出力される。
2. Description of the Related Art A confocal displacement meter is known as a device for measuring a displacement of a surface of a measurement object by a non-contact method. For example,
第1光路は、光軸方向における計測対象物の表面位置の近傍の異なった距離において異なる波長の光が焦点を結ぶように構成される。第1光路を通過した光は、計測対象物の表面で反射される。反射光のうち、空間的なフィルタとして第1経路に配置された開口部の位置で合焦した光のみが当該開口部を通過して波長検出器に導かれる。波長検出器により検出された光のスペクトルプロファイル(第1出力スペクトルプロファイル)は、計測距離を示す成分(距離依存性のプロファイル成分)を含むとともに、距離非依存性のプロファイル成分をも含む。 The first optical path is configured such that light of different wavelengths is focused at different distances near the surface position of the measurement object in the optical axis direction. Light that has passed through the first optical path is reflected on the surface of the measurement target. Of the reflected light, only light focused at the position of the opening disposed on the first path as a spatial filter passes through the opening and is guided to the wavelength detector. The spectrum profile (first output spectrum profile) of the light detected by the wavelength detector includes a component indicating the measurement distance (distance-dependent profile component) and also includes a distance-independent profile component.
第2光路は、計測対象物の表面位置の近傍の略同一距離において異なる波長の光が焦点を結ぶように構成される。第2光路を通過した光は、計測対象物の表面で反射される。反射光のうち、空間的なフィルタとして第2経路に配置された開口部の位置で合焦した光のみが当該開口部を通過して波長検出器に導かれる。波長検出器により検出された光のスペクトルプロファイル(第2出力スペクトルプロファイル)は、距離依存性のプロファイル成分を含まず、距離非依存性のプロファイル成分のみを含む。第2出力スペクトルプロファイルを用いて、第1出力スペクトルプロファイルについて、距離非依存性のプロファイル成分に関連する潜在的な計測誤差のための補正が行われる。 The second optical path is configured such that lights of different wavelengths are focused at substantially the same distance near the surface position of the measurement target. Light that has passed through the second optical path is reflected on the surface of the measurement target. Of the reflected light, only light focused at the position of the opening disposed in the second path as a spatial filter passes through the opening and is guided to the wavelength detector. The spectrum profile (second output spectrum profile) of the light detected by the wavelength detector does not include a distance-dependent profile component, but includes only a distance-independent profile component. The second output spectral profile is used to correct the first output spectral profile for potential measurement errors associated with distance-independent profile components.
特許文献1記載のCPSシステムにおいては、第1出力スペクトルプロファイルについて上記の補正が行われることにより、信頼性が向上される。具体的には、距離非依存性のプロファイル成分として、計測対象物の材料成分、光源に関連付けられる光源のスペクトルプロファイル成分または波長検出器に関連付けられる成分による計測誤差が低減される。しかしながら、共焦点変位計においては、計測対象物の表面の乱反射の影響により、表面の粗さよりも大きい度合いの計測誤差が発生する。特許文献1のCPSシステムでは、このような計測誤差を低減することができない。
In the CPS system described in
本発明の目的は、計測誤差を低減可能な共焦点変位計を提供することである。 An object of the present invention is to provide a confocal displacement meter capable of reducing a measurement error.
(1)本発明に係る共焦点変位計は、共焦点光学系を利用して計測対象物の変位を計測する共焦点変位計であって、複数の波長を有する光を出射する投光部と、投光部により出射された光の第1の光路上に設けられ、投光部により出射された光の光軸を順次シフトすることにより計測対象物に照射される光を当該光の光軸と直交する方向に順次シフトさせて、計測対象物の連続的または断続的な複数の部分に順次照射する光照射部と、光照射部により計測対象物に照射される光に光軸方向に沿った色収差を発生させるとともに、色収差を有する光を収束させる第1の光学部材と、計測対象物の複数の部分で合焦しつつ反射された波長の光を順次通過させる第1のピンホールを有する第1のピンホール部材と、第1のピンホールを順次通過した複数の部分に対応する複数の光についての波長ごとの強度の平均に対応する平均信号の波長ごとの信号強度に基づいて計測対象物の変位を算出する変位計測部とを備える。 (1) A confocal displacement meter according to the present invention is a confocal displacement meter that measures a displacement of an object to be measured using a confocal optical system, and includes a light projecting unit that emits light having a plurality of wavelengths. An optical axis of light emitted from the light projecting unit , which is provided on a first optical path of the light , and irradiating the object to be measured by sequentially shifting the optical axis of the light emitted by the light projecting unit ; A light irradiating section that sequentially shifts in a direction perpendicular to the direction of irradiation and sequentially irradiates a plurality of continuous or intermittent portions of the measurement object, and a light irradiation section that irradiates the measurement object with light along the optical axis direction. A first optical member that generates chromatic aberration and converges light having chromatic aberration, and a first pinhole that sequentially passes light of a wavelength reflected while being focused on a plurality of portions of the measurement object. a first pinhole member, sequentially passes through the first pinhole And a displacement measuring unit for calculating a displacement of the measurement object based on the signal strength of each wavelength of the average signal corresponding to the average of the intensity of each wavelength for a plurality of light corresponding to the number of parts.
この共焦点変位計においては、複数の波長を有する光が投光部により出射される。投光部により出射された光の光軸は、光の第1の光路上に設けられた光照射部により順次シフトされることにより、計測対象物に照射される光が当該光の光軸と直交する方向に順次シフトされ、計測対象物の連続的または断続的な複数の部分に順次照射される。光照射部により計測対象物に照射される光には、第1の光学部材により光軸方向に沿った色収差が発生する。また、色収差を有する光は第1の光学部材により収束される。計測対象物の複数の部分で合焦しつつ反射された波長の光が第1のピンホール部材の第1のピンホールを順次通過する。第1のピンホールを順次通過した複数の部分に対応する複数の光についての波長ごとの強度の平均に対応する平均信号の波長ごとの信号強度に基づいて変位計測部により計測対象物の変位が算出される。 In this confocal displacement meter, light having a plurality of wavelengths is emitted by the light projecting unit. The optical axis of the light emitted by the light projecting unit is sequentially shifted by the light irradiating unit provided on the first optical path of the light, so that the light irradiated on the measurement target is aligned with the optical axis of the light. It is sequentially shifted in the orthogonal direction, and is sequentially irradiated on a plurality of continuous or intermittent portions of the measurement object. Chromatic aberration along the optical axis direction is generated by the first optical member in the light irradiated to the measurement target by the light irradiation unit. Light having chromatic aberration is converged by the first optical member. Light of a wavelength reflected while being focused on a plurality of portions of the measurement object sequentially passes through the first pinholes of the first pinhole member. The displacement of the measurement object is determined by the displacement measuring unit based on the signal intensity for each wavelength of the average signal corresponding to the average of the intensity for each wavelength of the plurality of lights corresponding to the plurality of portions sequentially passing through the first pinhole. Is calculated.
計測対象物の表面での乱反射により、計測対象物の表面の位置とは異なる位置で合焦した光が第1のピンホールを通過することがある。そのような場合でも、上記の構成によれば、平均信号において第1のピンホールを通過した複数の部分に対応する複数の光についての波長ごとの強度が平均される。それにより、乱反射によるランダムな計測誤差を発生させる光の成分が打ち消される。その結果、共焦点変位計により計測される計測対象物の変位の誤差を低減することができる。 Due to irregular reflection on the surface of the measurement object, light focused at a position different from the position of the surface of the measurement object may pass through the first pinhole. Even in such a case, according to the above configuration, intensities of the plurality of lights corresponding to the plurality of portions that have passed through the first pinholes in the average signal for each wavelength are averaged. This cancels out light components that cause random measurement errors due to diffuse reflection. As a result, it is possible to reduce an error in displacement of the measurement object measured by the confocal displacement meter.
(2)変位計測部は、第1のピンホールを順次通過した複数の部分に対応する複数の光を順次分光する分光部と、分光部により順次分光された複数の部分に対応する複数の光を単一の露光期間内に受光し、受光した光について波長ごとの受光量を示す電気的な受光信号を平均信号として出力する受光部と、平均信号に基づいて計測対象物の変位を算出する算出部とを含んでもよい。 (2) The displacement measuring unit is configured to sequentially disperse a plurality of lights corresponding to a plurality of portions sequentially passing through the first pinhole, and a plurality of lights corresponding to the plurality of portions sequentially separated by the dispersing unit. And a light receiving unit that outputs an electric light receiving signal indicating an amount of received light for each wavelength as an average signal with respect to the received light, and calculates a displacement of the measurement target based on the average signal. And a calculating unit.
この場合、第1のピンホールを順次通過した複数の部分に対応する複数の光が単一の露光期間内に受光部により受光される。そのため、受光部から出力される波長ごとの受光量を示す電気的な受光信号は、複数の部分に対応する複数の光についての波長ごとの強度が積算された平均信号となる。この構成によれば、平均信号を生成するための演算を行う必要がない。これにより、計測対象物の変位を効率よく算出することができる。 In this case, a plurality of lights corresponding to a plurality of portions sequentially passing through the first pinhole are received by the light receiving section within a single exposure period. Therefore, the electrical light receiving signal indicating the amount of light received for each wavelength output from the light receiving unit is an average signal in which the intensities of the plurality of lights corresponding to the plurality of portions for each wavelength are integrated. According to this configuration, there is no need to perform an operation for generating an average signal. Thus, the displacement of the measurement target can be calculated efficiently.
(3)変位計測部は、第1のピンホールを順次通過した複数の光を順次分光する分光部と、分光部により順次分光された複数の光を順次受光し、順次受光された複数の光の各々について波長ごとの受光量を示す電気的な受光信号を出力する受光部と、受光部から出力される複数の受光信号を波長ごとに平均または積算することにより波長ごとの信号強度として平均信号を算出し、平均信号に基づいて計測対象物の変位を算出する算出部とを含んでもよい。 (3) The displacement measuring unit sequentially splits the plurality of lights sequentially passing through the first pinhole, and sequentially receives the plurality of lights sequentially split by the splitting unit, and the plurality of lights sequentially received. A light receiving unit that outputs an electric light receiving signal indicating the amount of light received for each wavelength, and an average signal as a signal intensity for each wavelength by averaging or integrating a plurality of light receiving signals output from the light receiving unit for each wavelength. And a calculator for calculating the displacement of the measurement target based on the average signal.
この場合、第1のピンホールを順次通過した複数の光にそれぞれ対応する複数の受光信号が受光部により出力される。受光部から出力される複数の受光信号が算出部により波長ごとに平均または積算されることにより平均信号が算出される。この構成によれば、平均信号の算出において、複数の光の強度を考慮した所望の平均または積算を行うことができる。これにより、計測対象物の変位をより正確に算出することができる。 In this case, a plurality of light receiving signals respectively corresponding to a plurality of lights sequentially passing through the first pinhole are output by the light receiving unit. The average signal is calculated by averaging or integrating a plurality of light receiving signals output from the light receiving unit for each wavelength by the calculating unit. According to this configuration, in the calculation of the average signal, a desired average or integration can be performed in consideration of the intensities of a plurality of lights. Thereby, the displacement of the measurement object can be calculated more accurately.
(4)変位計測部は、第1のピンホールを順次通過した複数の部分に対応する複数の光を順次分光する分光部と、分光部により順次分光された複数の部分に対応する複数の光を複数の露光期間内に受光し、複数の露光期間において受光した光について波長ごとの受光量を示す電気的な受光信号を出力する受光部と、受光部から出力される複数の露光期間に対応する複数の受光信号を波長ごとに平均または積算することにより波長ごとの信号強度として平均信号を算出し、平均信号に基づいて計測対象物の変位を算出する算出部とを含んでもよい。 (4) The displacement measuring unit sequentially splits a plurality of lights corresponding to a plurality of portions sequentially passing through the first pinhole, and a plurality of lights corresponding to the plurality of portions sequentially split by the splitting unit. the received within a plurality of exposure periods, and a light receiving section for outputting an electrical light reception signal indicating the received light amount for each wavelength for light received at a plurality of exposure periods, corresponding to a plurality of exposure periods output from the light receiving portion And calculating a mean signal as a signal intensity for each wavelength by averaging or integrating a plurality of received light signals for each wavelength, and calculating a displacement of the measurement object based on the mean signal.
この場合、第1のピンホールを順次通過した複数の部分に対応する複数の光が複数の露光期間内に受光部により受光されることにより、複数の露光期間に対応する複数の受光信号が出力される。受光部から出力される複数の露光期間に対応する複数の受光信号が算出部により波長ごとに平均または積算されることにより平均信号が算出される。この構成によれば、平均信号の算出において、複数の部分に対応する複数の光の強度を考慮した所望の平均または積算を行うことができる。これにより、計測対象物の変位をより正確に算出することができる。 In this case, a plurality of light beams corresponding to a plurality of portions sequentially passing through the first pinhole are received by the light receiving unit within a plurality of exposure periods, so that a plurality of light reception signals corresponding to the plurality of exposure periods are output. Is done. An average signal is calculated by averaging or integrating a plurality of light receiving signals corresponding to a plurality of exposure periods output from the light receiving unit for each wavelength by the calculating unit. According to this configuration, in calculating the average signal, desired averaging or integration can be performed in consideration of the intensities of a plurality of lights corresponding to a plurality of portions . Thereby, the displacement of the measurement object can be calculated more accurately.
(5)光照射部は、光が計測対象物の表面の円環状の領域上の複数の部分に照射されるように、投光部により出射された光の光軸を計測対象物の表面に沿ってシフトさせてもよい。この構成によれば、計測対象物の表面の直線状の領域上の複数の部分に光を照射する場合に比べて、光照射部の物理的な動作部分の負担が小さい。これにより、光照射部の寿命を長期化することができる。 (5) The light irradiating unit sets the optical axis of the light emitted by the light projecting unit on the surface of the measurement target so that the light irradiates a plurality of portions on the annular region on the surface of the measurement target. It may be shifted along. According to this configuration, the burden on the physically operating portion of the light irradiation section is smaller than when a plurality of portions on the linear region on the surface of the measurement target are irradiated with light. Thereby, the life of the light irradiation part can be prolonged.
(6)円環状の領域の外径は100μm以上であってもよい。この場合、計測対象物の表面における十分に大きな領域の複数の部分で光が反射される。そのため、平均信号において、乱反射によるランダムな計測誤差を発生させる光の成分が十分に打ち消される。これにより、共焦点変位計により計測される計測対象物の変位の誤差をより低減することができる。 (6) The outer diameter of the annular region may be 100 μm or more. In this case, light is reflected at a plurality of portions of a sufficiently large area on the surface of the measurement object. Therefore, in the average signal, a light component that generates a random measurement error due to diffuse reflection is sufficiently canceled. Thereby, the error of the displacement of the measurement object measured by the confocal displacement meter can be further reduced.
(7)円環状の領域の外径は500μm以下であってもよい。この場合、光照射部により計測対象物に照射される光は過度に大きく広がらないので、第1の光学部材の中心付近を通過することができる。そのため、コマ収差等の測定精度を低下させる収差がほとんど発生しない。これにより、計測対象物の変位をより高い精度で計測することができる。 (7) The outer diameter of the annular region may be 500 μm or less. In this case, the light irradiated to the measurement target by the light irradiation unit does not spread excessively large, and thus can pass near the center of the first optical member. Therefore, almost no aberration such as coma which lowers the measurement accuracy occurs. Thus, the displacement of the measurement target can be measured with higher accuracy.
(8)光照射部は、透光性を有する部材により形成されるとともに、第1および第2の面を有する第1の透光部と、駆動部とを含み第1の透光部の第1および第2の面のうち少なくとも一方の面は、投光部により出射された光の第1の光路に直交する面に対して傾斜する状態で第1の光路上に配置され、駆動部は、第1の光路に交差する面内で第1の透光部の第1および第2の面を回転させるように構成されてもよい。 (8) The light irradiating section is formed of a member having a light transmitting property, includes a first light transmitting section having first and second surfaces, and a driving section, and includes a driving section. At least one of the first and second surfaces is disposed on the first optical path in a state of being inclined with respect to a plane orthogonal to the first optical path of the light emitted by the light projecting unit, and the driving unit includes: The first and second surfaces of the first light transmitting portion may be configured to rotate in a plane intersecting the first optical path.
この場合、計測対象物の表面に照射される光の光軸が、第1の透光部が配置されないときに計測対象物の表面に照射される光の光軸からシフトする。したがって、駆動部により第1の透光部を回転させることにより、簡単な構成で計測対象物の表面の円環状の領域上の複数の部分に光を照射することができる。 In this case, the optical axis of the light applied to the surface of the measurement object shifts from the optical axis of the light applied to the surface of the measurement object when the first light transmitting unit is not disposed. Therefore, by rotating the first light transmitting unit by the driving unit, it is possible to irradiate a plurality of portions on the annular region on the surface of the measurement target with a simple configuration.
(9)共焦点変位計は、処理装置と、第1のヘッド部とをさらに備え、処理装置は、投光部および変位計測部を含むとともに、投光部および変位計測部を収容する第1の筐体をさらに含み、第1のヘッド部は、光照射部および第1の光学部材を含むとともに、光照射部および第1の光学部材を収容する第2の筐体をさらに含んでもよい。 (9) The confocal displacement meter further includes a processing device and a first head unit, and the processing device includes a light projecting unit and a displacement measuring unit, and a first device that houses the light projecting unit and the displacement measuring unit. And the first head unit may include a light irradiation unit and a first optical member, and may further include a second housing that houses the light irradiation unit and the first optical member.
この場合、投光部および変位計測部を含む処理装置と光照射部および第1の光学部材を含むヘッド部とが別体的に設けられる。そのため、計測対象物の形状もしくは配置等に応じて適切な色収差を発生させる第1の光学部材または適切な焦点距離を有する第1の光学部材を含む第1のヘッド部を用いることが容易になる。これにより、計測対象物の変位をより容易に計測することができる。 In this case, a processing device including the light projecting unit and the displacement measuring unit and a head unit including the light irradiating unit and the first optical member are separately provided. Therefore, it is easy to use the first head member including the first optical member that generates appropriate chromatic aberration or the first optical member having an appropriate focal length according to the shape or arrangement of the measurement target. . Thereby, the displacement of the measurement object can be more easily measured.
(10)処理装置は、第1の筐体に収容される電力供給部をさらに含み、電力供給部は、第1のヘッド部の駆動部に電力を供給可能に光照射部に接続されてもよい。この場合、駆動部に電力を供給するための装置を第2の筐体に収容する必要がない。これにより、第1のヘッド部を小型化および軽量化することができる。 (10) The processing apparatus further includes a power supply unit housed in the first housing, and the power supply unit is connected to the light irradiation unit so that power can be supplied to the driving unit of the first head unit. Good. In this case, it is not necessary to house a device for supplying power to the drive unit in the second housing. Thereby, the first head portion can be reduced in size and weight.
(11)共焦点変位計は、第2のヘッド部と、第2のピンホールを有する第2のピンホール部材とをさらに備え、第2のヘッド部は、投光部により出射された光に光軸方向に沿った色収差を発生させるとともに、色収差を有する光を収束させて計測対象物に照射する第2の光学部材と、透光性を有する部材により形成されるとともに、第3および第4の面を有する第2の透光部と、第2の光学部材および第2の透光部を収容する第3の筐体とを含み、第2の透光部の第3および第4の面のうち少なくとも一方の面は、投光部により出射された光の第2の光路に直交する面に対して傾斜する状態で第2の光路上に配置され、第2のピンホールは、第2のヘッド部の第2の光学部材により計測対象物の表面で合焦しつつ反射された波長の光を通過させ、変位計測部は、第2のピンホールを通過した光についての波長ごとの信号強度に基づいて計測対象物の変位を算出し、投光部により出射された光は、第1のヘッド部と第2のヘッド部とに選択的に導かれてもよい。 (11) The confocal displacement meter further includes a second head section and a second pinhole member having a second pinhole, and the second head section controls the light emitted by the light projecting section. A second optical member that generates chromatic aberration along the optical axis direction, converges light having chromatic aberration, and irradiates the object to be measured, and a third member and a fourth member that are formed of a light-transmitting member. A second light-transmitting part having a second light-transmitting part, and a third housing that houses the second optical member and the second light-transmitting part, and the third and fourth surfaces of the second light-transmitting part At least one of the surfaces is disposed on the second optical path in a state of being inclined with respect to a surface orthogonal to the second optical path of the light emitted by the light projecting unit, and the second pinhole is provided on the second optical path. Passes light of wavelength reflected while being focused on the surface of the measurement object by the second optical member of the head unit The displacement measurement unit calculates the displacement of the measurement target based on the signal intensity of the light passing through the second pinhole for each wavelength, and outputs the light emitted by the light projection unit to the first head unit. And the second head unit may be selectively guided.
この場合、第2のヘッド部を用いた計測においては、計測対象物の複数の部分に光を照射する必要がない。そのため、計測対象物の表面の形状が十分に滑らかであり、乱反射の程度が小さい場合には、第2のヘッド部を用いることにより計測対象物を十分に高い精度でかつ短時間で計測することができる。 In this case, in the measurement using the second head unit, it is not necessary to irradiate a plurality of portions of the measurement target with light. Therefore, when the shape of the surface of the object to be measured is sufficiently smooth and the degree of irregular reflection is small, the object to be measured can be measured with sufficiently high accuracy and in a short time by using the second head unit. Can be.
また、第2のヘッド部には、第2の光路上に第1のヘッド部における第1の透光部と同様の第2の透光部が配置される。この構成によれば、第2のヘッド部における第2の光路の長さを第1のヘッド部における第1の光路の長さに容易に一致させることができる。そのため、第1のヘッド部を用いた共焦点光学系と第2のヘッド部を用いた共焦点光学系とを独立に構成することが容易になる。 In the second head section, a second light transmitting section similar to the first light transmitting section in the first head section is arranged on the second optical path. According to this configuration, the length of the second optical path in the second head unit can be easily matched with the length of the first optical path in the first head unit. Therefore, it is easy to independently configure the confocal optical system using the first head unit and the confocal optical system using the second head unit.
(12)共焦点変位計は、光ファイバをさらに備え、光ファイバは、投光部により出射された光を第1の光学部材に導くとともに、計測対象物の複数の部分で反射されることにより第1のピンホールを順次通過した複数の光を変位計測部に導くように設けられてもよい。この場合、投光部により出射された光を第1の光学部材に導くとともに第1のピンホールを通過した複数の光を分光部に導くための光路の構成の自由度が向上する。 (12) The confocal displacement meter further includes an optical fiber. The optical fiber guides the light emitted by the light projecting unit to the first optical member, and is reflected by a plurality of portions of the measurement target. A plurality of lights sequentially passing through the first pinhole may be provided to the displacement measurement unit. In this case, the degree of freedom in the configuration of an optical path for guiding the light emitted by the light projecting unit to the first optical member and guiding the plurality of lights passing through the first pinhole to the light splitting unit is improved.
(13)光ファイバの端部が第1のピンホールであってもよい。この場合、第1のピンホールを別個に配置する必要がない。これにより、共焦点変位計の構成をコンパクトにすることができる。 (13) The end of the optical fiber may be a first pinhole. In this case, there is no need to separately arrange the first pinhole. Thereby, the configuration of the confocal displacement meter can be made compact.
(14)投光部は、単一波長の光を出射する光源と、光源により出射された光を吸収して光源により出射された光の波長とは異なる波長の光を放出する蛍光体とを含んでもよい。この場合、複数の波長を有する光を容易に生成することができる。 (14) The light projecting unit includes a light source that emits light of a single wavelength and a phosphor that absorbs light emitted by the light source and emits light of a wavelength different from the wavelength of light emitted by the light source. May be included. In this case, light having a plurality of wavelengths can be easily generated.
本発明によれば、計測対象物の計測誤差を低減することができる。 According to the present invention, a measurement error of a measurement target can be reduced.
(1)共焦点変位計の基本構成
以下、本発明の一実施の形態に係る共焦点変位計について図面を参照しながら説明する。図1は、本発明の一実施の形態に係る共焦点変位計の構成を示す模式図である。図1に示すように、共焦点変位計500は、処理装置100、複数(本例では2個)の計測ヘッド200、導光部300および制御装置400を備える。導光部300は、複数の光ファイバを含み、処理装置100といずれかの計測ヘッド200とを光学的に接続する。以下、2個の計測ヘッド200を区別する場合は、一方の計測ヘッド200を第1計測ヘッド200Aと呼び、他方の計測ヘッド200を第2計測ヘッド200Bと呼ぶ。
(1) Basic Configuration of Confocal Displacement Meter Hereinafter, a confocal displacement meter according to an embodiment of the present invention will be described with reference to the drawings. FIG. 1 is a schematic diagram showing a configuration of a confocal displacement meter according to one embodiment of the present invention. As shown in FIG. 1, the
処理装置100は、筐体110、投光部120、分光部130、受光部140、演算処理部150、電力供給部160および表示部170を含む。筐体110は、投光部120、分光部130、受光部140、演算処理部150および電力供給部160を収容する。投光部120は、広い波長帯域(例えば500nm〜700nm)の光すなわち複数の波長を有する光を出射可能に構成される。投光部120の詳細な構成については後述する。投光部120により出射された光は、後述する導光部300の光ファイバ311に入力される。
The
分光部130は、回折格子131および複数(本例では2個)のレンズ132,133を含む。後述するように、投光部120により出射されて計測対象物Sの表面で反射された光の一部が、導光部300の光ファイバ312から出力される。光ファイバ312から出力された光は、レンズ132を通過することにより略平行化され、回折格子131に入射される。本実施の形態においては、回折格子131は反射型の回折格子である。回折格子131に入射された光は、波長ごとに異なる角度で反射するように分光され、レンズ133を通過することにより波長ごとに異なる一次元上の位置に合焦される。
The
受光部140は、複数の画素が一次元状に配列された撮像素子(一次元ラインセンサ)を含む。撮像素子は、多分割PD(フォトダイオード)、CCD(電荷結合素子)カメラまたはCMOS(相補性金属酸化膜半導体)イメージセンサであってもよいし、他の素子であってもよい。受光部140は、分光部130のレンズ133により形成された波長ごとに異なる複数の合焦位置で撮像素子の複数の画素がそれぞれ光を受光するように配置される。受光部140の各画素からは、受光量に対応するアナログの電気信号(以下、受光信号と呼ぶ。)が出力される。
The
演算処理部150は、記憶部151および制御部152を含む。記憶部151は、例えばROM(リードオンリメモリ)、RAM(ランダムアクセスメモリ)またはハードディスクを含む。記憶部151には、変位計測プログラムが記憶されるとともに、変位計測に用いられる種々のデータが記憶される。制御部152は、例えばCPU(中央演算処理装置)を含む。制御部152は、受光部140により出力される受光信号を取得し、記憶部151に記憶された変位計測プログラムおよびデータに基づいて計測対象物Sの変位計測処理を実行する。
The
第1計測ヘッド200Aは、略軸対称形状(例えば円筒形状)を有する筐体210、レンズユニット220、平板部材230および駆動部240を含む。筐体210は、レンズユニット220、平板部材230および駆動部240を収容する。平板部材230は、透過性を有する平板状の部材により形成される。平板部材230、例えば平板ガラスであってもよいし、レンズ素子であってもよいし、他の素子であってもよい。
The
駆動部240には、図示しない電源ケーブルを介して処理装置100の電力供給部160により電力が供給される。そのため、駆動部240に電力を供給するための装置を筐体210に収容する必要がない。これにより、第1計測ヘッド200Aを小型化および軽量化することができる。第2計測ヘッド200Bは、駆動部240を有さない点を除き、第1計測ヘッド200Aと同様の構成を有する。平板部材230および駆動部240により、第1計測ヘッド200Aから出射される光の光軸をシフトさせるための光照射部1が構成される。光照射部1の詳細については後述する。
Power is supplied to the
筐体210内に後述する導光部300の光ファイバ314が配置される。光ファイバ314から出力された処理装置100からの光は、平板部材230を通過してレンズユニット220に導かれる。レンズユニット220は、屈折レンズ221、回折レンズ222および対物レンズ223を含む。平板部材230を通して導かれた光は、屈折レンズ221および回折レンズ222を順に通過する。これにより、光軸方向に沿って光に色収差が発生する。ここで、光軸とは、屈折レンズ221、回折レンズ222および対物レンズ223の各々の光軸が略一致している場合における当該光軸を意味するだけでなく、屈折レンズ221、回折レンズ222および対物レンズ223のいずれか1つ以上の光軸を意味してもよい。対物レンズ223は、色収差が発生した光が計測対象物Sの表面近傍の位置で合焦可能に配置される。
An
導光部300は、複数(本例では4個)の光ファイバ311〜314、ファイバカプラ320およびファイバコネクタ330を含む。図1の例では、ファイバカプラ320は処理装置100の筐体110に設けられ、ファイバコネクタ330は計測ヘッド200の筐体210に設けられる。本発明はこれに限定されず、ファイバカプラ320は処理装置100の筐体110以外の部分に設けられてもよいし、ファイバコネクタ330は計測ヘッド200の筐体210以外の部分に設けられてもよい。
The
ファイバカプラ320は、いわゆる1×2型の構成を有し、3個のポート321〜323および本体部324を含む。ポート321,322とポート323とは、本体部324を挟んで対向するように本体部324に接続される。ポート321,322の少なくとも1つのポートに入力された光は、ポート323から出力される。ポート323に入力された光は、ポート321,322の各々から出力される。
The fiber coupler 320 has a so-called 1 × 2 configuration, and includes three
ファイバコネクタ330は、2個のポート331,332および本体部333を含む。ポート331とポート332とは、本体部333を挟んで対向するように本体部333に接続される。ポート331に入力された光はポート332から出力され、ポート332に入力された光はポート331から出力される。
The
ファイバカプラ320のポート321,322には、光ファイバ311,312がそれぞれ接続される。ファイバコネクタ330のポート332には、光ファイバ314が接続される。ファイバカプラ320のポート323とファイバコネクタ330のポート331とが光ファイバ313により接続される。
この構成によれば、処理装置100の投光部120により出射された光は、光ファイバ311を通してファイバカプラ320のポート321に入力される。ポート321に入力された光は、ポート323から出力され、光ファイバ313を通してファイバコネクタ330のポート331に入力される。ポート331に入力された光は、ポート332から出力され、光ファイバ314、平板部材230およびレンズユニット220を通して計測対象物Sに照射される。
According to this configuration, the light emitted by the
計測対象物Sの表面で反射された光の一部は、レンズユニット220、平板部材230および光ファイバ314を通してファイバコネクタ330のポート332に入力される。ポート332に入力された光は、ポート331から出力され、光ファイバ313を通してファイバカプラ320のポート323に入力される。ポート323に入力された光は、ポート321,322から出力される。ポート322から出力された光は、光ファイバ312を通して分光部130に導かれる。これにより、変位計測処理が行われる。
Part of the light reflected on the surface of the measurement target S is input to the
表示部170は、7セグメント表示器またはドットマトリクス表示器等の表示器を含む。表示部170は、処理装置100の筐体110に設けられ、演算処理部150に接続される。表示部170には、演算処理部150の変位計測処理により算出された計測距離等の数値が表示される。
The
制御装置400は、例えばパーソナルコンピュータにより構成され、処理装置100の演算処理部150に接続される。制御装置400は、表示装置401、操作部402、CPU(中央演算処理装置)403およびメモリ404を含む。表示装置401は、例えば液晶ディスプレイパネルまたは有機EL(エレクトロルミネッセンス)パネルを含む。操作部402は、マウス等のポインティングデバイスおよびキーボードを含む。メモリ404には、変位計測プログラムが記憶されるとともに、変位計測に用いられる種々のデータが記憶される。
The
CPU403は、制御部152から与えられた受光信号を取得し、メモリ404に記憶された変位計測プログラムおよびデータに基づいて計測対象物Sの変位を計測するとともに、その計測結果に関する種々の処理を行う。例えば、CPU403は、計測結果の値を表示装置401に表示する。また、CPU403は、制御部152から与えられた受光信号の波形を表示装置401に表示する。さらに、CPU403は、現時点よりも前の複数の時点で取得された複数の計測結果についての統計を表示装置401に表示する。
The
図2は、表示装置401における計測結果の値の表示例である。図3は、表示装置401における受光信号の波形の表示例である。図2の例では、表示装置401に、変位の計測結果を示す数値が表示されるとともに切替ボタン491が表示される。また、図3の例では、表示装置401に、現時点で取得される受光信号の波形が表示されるとともに切替ボタン491が表示される。図3の受光信号の波形を示すグラフにおいては、横軸は受光された光の波長を示し、縦軸は受光信号の強度を示す。
FIG. 2 is a display example of the value of the measurement result on the
使用者は、図1の操作部402を用いて図2の切替ボタン491を操作することにより、表示装置401の表示状態を図3の受光波形の表示状態に切り替えることができる。また、使用者は、図1の操作部402を用いて図3の切替ボタン491を操作することにより、表示装置401の表示状態を図2の数値による計測結果の値の表示状態に切り替えることができる。
The user can switch the display state of the
また、CPU403には、計測対象物Sの計測距離に対する良否判定用の基準範囲が設定されてもよい。この場合、計測距離が基準範囲内であるときには、計測対象物Sが良品であることを示す判定結果(例えば「OK」)が表示装置401に表示される。一方、計測距離が基準範囲外であるときには、計測対象物Sが不良品を示す判定結果(例えば「NG」)が表示装置401に表示される。
Further, the
(2)共焦点変位計の動作原理
図4は、第2計測ヘッド200Bを用いた共焦点変位計500の動作原理を説明するための図である。図4に示すように、光ファイバ314は、コア310aおよびクラッド310bを含む。コア310aはクラッド310bにより被覆される。コア310aの一端部に入力された光は、コア310aの他端部から出力される。なお、図1の光ファイバ311〜312も光ファイバ314と同様の構成を有する。コア310aの直径は、200μm以下であることが好ましく、50μm以下であることがより好ましい。
(2) Operation Principle of Confocal Displacement Meter FIG. 4 is a diagram for explaining the operation principle of the
平板部材230は、略平行な2つの面を有する。平板部材230の一方の面を入射面231と呼び、他方の面を出射面232と呼ぶ。平板部材230は、入射面231および出射面232が光ファイバ314の光軸に直交する面に対して傾斜した状態で配置される。第2計測ヘッド200Bにおいて、光ファイバ314から出力された光の光路上に平板部材230が配置されることにより、第2計測ヘッド200Bにおける光路の長さを第1計測ヘッド200Aにおける光路の長さと一致させることができる。これにより、駆動部240を有さない第2計測ヘッド200Bにおいても、第1計測ヘッド200Aと同様に、収差を最小にすることができる。
The
光ファイバ314から出力された光は、平板部材230を通過した後、屈折レンズ221および回折レンズ222を通過する。これにより、光に色収差が発生する。色収差が発生した光は、対物レンズ223を通過することにより波長ごとに異なる位置で合焦する。例えば、波長が長い光は対物レンズ223に近い位置で合焦し、波長が短い光は対物レンズ223から遠い位置で合焦する。対物レンズ223に最も近い合焦位置P1と対物レンズ223から最も遠い合焦位置P2との間の範囲が計測範囲MRとなる。本例では、屈折レンズ221は凸型を有し、回折レンズ222は凹型を有する。この場合、光に発生する色収差が大きくなる。これにより、計測範囲MRを大きくすることができる。
The light output from the
計測範囲MRに計測対象物Sの表面が存在する場合には、対物レンズ223を通過した光は、計測対象物Sの表面に照射された後、当該表面により広範囲に反射される。ここで、本実施の形態においては、光ファイバ314の先端部分は、微小なピンホールを有する空間フィルタとして機能する。したがって、計測対象物Sの表面で反射された光のほとんどは、光ファイバ314に入力されない。
When the surface of the measurement target S exists in the measurement range MR, the light that has passed through the
一方、計測対象物Sの表面の位置で合焦した特定の波長を有する光は、当該表面で反射されることによりレンズユニット220を通過し、光ファイバ314のコア310aの先端部分に入力される。光ファイバ314に入力された光の波長は、計測距離を示す。ここで、計測距離とは、所定の基準位置RPから計測対象物Sの表面の位置までの距離である。なお、本例では、基準位置RPは計測対象物Sに最も近い筐体210の端部の位置である。
On the other hand, light having a specific wavelength focused at the position of the surface of the measurement target S is reflected by the surface, passes through the
光ファイバ314に入力された光は、図1の処理装置100に導かれ、回折格子131により分光されるとともにレンズ133により波長ごとに異なる位置に合焦される。受光部140の複数の画素は、波長ごとに異なる複数の光の合焦位置にそれぞれ配置される。そのため、受光部140の各画素は、当該画素に対応付けられた波長の光を受光し、受光信号を出力する。
The light input to the
この構成によれば、受光信号を出力する受光部140の画素の位置を特定することにより、受光された光の波長を特定することができる。また、受光された光の波長を特定することにより、計測距離を特定することができる。しかしながら、計測対象物Sの表面における光の乱反射により、計測対象物Sの表面の位置とは異なる位置で合焦する光が光ファイバ314に入力されることがある。この場合、処理装置100により特定される計測距離には、計測対象物Sの表面の粗さよりも大きい度合いの計測誤差が発生する。そのため、第2計測ヘッド200Bは、乱反射の程度が小さい計測対象物S(例えばガラス等の滑らかな表面を有する計測対象物S)を高い精度でかつ短時間で計測するために用いられる。
According to this configuration, the wavelength of the received light can be specified by specifying the position of the pixel of the
一方で、粗い表面を有する計測対象物Sを計測する場合には、第1計測ヘッド200Aが用いられる。図5は、第1計測ヘッド200Aを用いた共焦点変位計500の動作原理を説明するための図である。上記のように、第1計測ヘッド200Aは、駆動部240をさらに含む点を除き、第2計測ヘッド200Bと同様の構成を有する。平板部材230および駆動部240により光照射部1が構成される。図5に示すように、駆動部240は、例えば中空モータであり、円筒状の固定部241および円筒状の回転軸242を含む。回転軸242は、固定部241と同心になるように固定部241の中空部分に設けられる。
On the other hand, when measuring the measurement target S having a rough surface, the
光ファイバ314の端部は、例えば図示しないフェルールに挿入された状態で、回転軸242の中空部分に固定される。平板部材230は、入射面231および出射面232が光ファイバ314の光軸に直交する面に対して傾斜した状態で回転軸242に取り付けられる。本実施の形態においては、光ファイバ314から光が出射された状態で、回転軸242が回転する。駆動部240の回転速度は100rpm以上が好ましく、6000rpm以上がより好ましい。本実施の形態において、駆動部240は連続的に回転するが、本発明はこれに限定されない。駆動部240は間欠的に回転してもよい。
The end of the
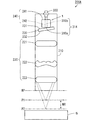
図6は、駆動部240の回転時における光の光路を示す図である。図6(a)は、初期時点における光の光路を示す。図6(b)は、初期時点から一定時間が経過した時点(初期時点から駆動部240が90度回転した時点)における光の光路を示す。図6(c)は、図6(b)の時点からさらに一定時間が経過した時点(図6(b)の時点から駆動部240がさらに90度回転した時点)における光の光路を示す。
FIG. 6 is a diagram illustrating an optical path of light when the
図6(a)〜(c)に示すように、光ファイバ314から出力された光は、光ファイバ314の光軸と略平行に平板部材230の入射面231に入射される。平板部材230の入射面231は光ファイバ314の光軸に直交する面に対して傾斜しているので、平板部材230の入射面231に入射された光は、入射角に対して傾斜した角度で平板部材230内を透過する。その後、光は、入射角と略等しい角度で平板部材230の出射面232から出射される。これにより、光の光軸をシフトさせつつ、図1のレンズユニット220を通して計測対象物Sに光を照射することができる。
As shown in FIGS. 6A to 6C, the light output from the
図7は、光が照射される計測対象物Sの領域を示す図である。図7に示すように、本実施の形態では、計測対象物Sの表面の円環状の領域IR(以下、照射領域IRと呼ぶ。)に光が照射される。この構成によれば、計測対象物Sの表面の直線状の領域に光を照射する場合に比べて、光照射部1の物理的な動作部分の負担が小さい。これにより、光照射部1の寿命を長期化することができる。平板部材230の傾斜角度、厚みおよび屈折率等を選択することにより、照射領域IRの外径ODを決定することができる。本例では、外径ODは例えば250μmである。このように外径ODは微小であるため、使用者には照射領域IRは円環状ではなく1つの点として認識される。
FIG. 7 is a diagram illustrating an area of the measurement target S to which light is irradiated. As shown in FIG. 7, in the present embodiment, light is applied to an annular region IR (hereinafter, referred to as an irradiation region IR) on the surface of the measurement target S. According to this configuration, the load on the physically operating portion of the
計測対象物Sの照射領域IRで反射された光のうち、照射領域IRの位置で合焦した光がレンズユニット220および平板部材230を通過して光ファイバ314に入力され、受光部140により受光される。図8は、受光部140により受光された光の波長と受光信号の強度との関係を示す図である。図8の横軸は受光された光の波長を示し、縦軸は受光信号の強度を示す。後述する図11〜図13においても同様である。図8および後述する図11〜図13の横軸は、受光部140の画素の位置に相当する。
Of the light reflected from the irradiation region IR of the measurement target S, light focused at the position of the irradiation region IR is input to the
受光部140は、駆動部240が1回転する期間の各時点に光ファイバ314に入力された光を受光する。図8においては、任意の4つの時点に光ファイバ314に入力された光の受光信号の波形(以下、受光波形と呼ぶ。)W1〜W4が、仮想的に分離された状態で点線、一点鎖線、二点鎖線および破線によりそれぞれ示される。受光波形W1〜W4のピークの波長(以下、ピーク波長と呼ぶ。)は、それぞれλ1〜λ4である。複数の受光波形W1〜W4のピーク波長λ1〜λ4は、計測対象物Sの表面の乱反射により互いに異なる。
The
そこで、第1計測ヘッド200Aが用いられる場合には、受光部140は、駆動部240が1回転する期間の間露光を行う。本実施の形態において、受光部140は連続的に露光を行うが、本発明はこれに限定されない。受光部140は間欠的に露光を行ってもよい。
Therefore, when the
受光部140の各画素から露光期間に積算された受光信号が出力される。これにより、受光部140から出力される受光信号には、強度の平均化処理が行われる。平均化処理とは、計測対象物Sの照射領域IRの複数の部分により反射されてピンホールを順次通過した複数の光についての波長ごとの強度の平均に対応する平均信号を生成する処理を意味する。本例では、平均化処理は積算処理である。図8においては、受光部140により出力される平均化処理後の受光波形W0が実線により示される。受光波形W0のピーク波長はλ0である。
Each pixel of the
このように、光学的に受光波形W0の平均化処理が行われることにより、乱反射によるランダムな計測誤差を発生させる光の成分が打ち消される。そのため、ピーク波長λ0は、各時点におけるピーク波長λ1〜λ4等よりも真の計測距離に対応するピーク波長に近い。ここで、真の計測距離とは、光の乱反射が生じないときに特定されるべき計測距離である。したがって、受光波形W0のピーク波長λ0を特定することにより、計測距離をより正確に特定することができる。 As described above, by optically averaging the received light waveform W0, light components that generate random measurement errors due to irregular reflection are canceled. Therefore, the peak wavelength λ0 is closer to the peak wavelength corresponding to the true measurement distance than the peak wavelengths λ1 to λ4 at each time point. Here, the true measurement distance is a measurement distance to be specified when diffused reflection of light does not occur. Therefore, by specifying the peak wavelength λ0 of the received light waveform W0, the measurement distance can be specified more accurately.
照射領域IRの外径ODは100μm以上であることが好ましい。この場合、計測対象物Sの表面における十分に大きな領域の複数の部分で光が反射される。そのため、平均信号において、乱反射によるランダムな計測誤差を発生させる光の成分が十分に打ち消される。これにより、共焦点変位計500により計測される計測対象物Sの変位の誤差をより低減することができる。
The outer diameter OD of the irradiation area IR is preferably 100 μm or more. In this case, light is reflected at a plurality of portions of a sufficiently large area on the surface of the measurement target S. Therefore, in the average signal, a light component that generates a random measurement error due to diffuse reflection is sufficiently canceled. Thereby, the error of the displacement of the measurement object S measured by the
また、照射領域IRの外径ODは500μm以下であることが好ましい。この場合、光照射部1により計測対象物Sに照射される光は過度に大きく広がらないので、レンズユニット220の中心付近を通過することができる。そのため、コマ収差等の測定精度を低下させる収差がほとんど発生しない。これにより、計測対象物Sの変位をより高い精度で計測することができる。
Further, the outer diameter OD of the irradiation region IR is preferably 500 μm or less. In this case, since the light irradiated on the measurement target S by the
(3)投光部
図9(a),(b)は、それぞれ投光部120の構成を示す平面図および断面図である。図9に示すように、投光部120は、光源121、蛍光体122、フェルール123、レンズ124、保持具125、フィルタ素子126および素子ホルダ127を含む。素子ホルダ127は、光源固定部127A、フェルール固定部127Bおよびレンズ固定部127Cを含む。光源121、フェルール123およびレンズ124は、素子ホルダ127の光源固定部127A、フェルール固定部127Bおよびレンズ固定部127Cにそれぞれ固定される。
(3) Light Projecting Unit FIGS. 9A and 9B are a plan view and a cross-sectional view illustrating the configuration of the
光源121は、単一波長の光を出射するレーザ光源である。本実施の形態においては、光源121は波長450nm以下の青色領域または紫外領域の光を出射する。蛍光体122は、青色領域または紫外領域の励起光を吸収し、励起光の波長領域とは異なる波長領域の蛍光を放出する。蛍光体122は、黄色領域の蛍光を放出してもよいし、緑色領域の蛍光を放出してもよいし、赤色領域の蛍光を放出してもよい。また、蛍光体122は、複数の蛍光部材により構成されてもよい。
The
フェルール123は、図1の導光部300の光ファイバ311の端部を保持する。レンズ124は、光源121とフェルール123との間に配置される。フェルール123(光ファイバ311)の端部には、円環状を有する保持具125の一端面が取り付けられる。保持具125の内周部に蛍光体122が収容される。保持具125内の蛍光体122を覆うように保持具125の他端面にフィルタ素子126が取り付けられる。フィルタ素子126は反射型フィルタであり、黄色領域、緑色領域または赤色領域の光を反射するとともに、青色領域または紫外領域の光を透過させる。
The
この構成によれば、光源121により出射された光は、レンズ124を通過することにより、励起光として蛍光体122上に集光される。蛍光体122は、励起光を吸収して蛍光を放出する。ここで、蛍光体122に吸収されずに透過した励起光と蛍光体122からの蛍光とが混合されることにより、広い波長帯域の光が生成される。本例においては、励起光と蛍光とが所望の割合で混合された光を生成するために、光路方向における蛍光体122の厚みが、例えば10μm〜200μmに形成される。また、保持具125内における蛍光体122の濃度が、例えば30%〜60%に形成される。
According to this configuration, the light emitted by the
投光部120において生成された光は、フェルール123を通過することにより光ファイバ311に入力される。蛍光体122により光ファイバ311とは反対の方向に放出された蛍光は、フィルタ素子126により光ファイバ311の方向に反射される。これにより、蛍光を効率よく光ファイバ311に入力することができる。
The light generated in the
本例においては、蛍光体122は保持具125内に収容されるが、本発明はこれに限定されない。蛍光体122は、フェルール123の端面に塗布されてもよい。この場合、投光部120は保持具125を含まない。また、投光部120はフィルタ素子126を含むが、本発明はこれに限定されない。十分な蛍光が光ファイバ311に入力される場合には、投光部120はフィルタ素子126を含まなくてもよい。
In this example, the
(4)演算処理部
図1の演算処理部150の記憶部151には、受光部140の画素の位置と、出力される受光波形W0のピーク波長λ0と、計測距離との換算式が予め記憶されている。演算処理部150の制御部152は、受光信号を出力する画素の位置を特定するとともに、特定された画素の位置および記憶部151に記憶された換算式に基づいて受光波形W0のピーク波長λ0および計測距離を順次算出する。これにより、計測対象物Sの厚み、距離または変位を計測することができる。また、制御部152は、計測距離をより正確に算出するために、以下に説明する基底波形の除去および受光部140の温度特性の補正を行う。
(4) Arithmetic Processing Unit The
(a)基底波形の除去
計測対象物Sとは異なる部分で反射された光が受光部140により受光されることがある。図10は、計測対象物Sとは異なる部分で反射される光の一例を示す模式図である。図10の例においては、レンズユニット220の屈折レンズ221により直接反射された光(矢印で示す光)が光ファイバ314に入力される。このような光は、計測距離を示す成分を含まずに、不要な成分を含む。
(A) Removal of Base Waveform Light reflected by a portion different from the measurement target S may be received by the
図11は、不要な成分を含む受光波形W0を示す図である。図11に示すように、受光波形W0には、3個のピークP0,Px,Pyが含まれる。ピークP0は、計測対象物Sの表面で反射された光により発生する。ピークP0は急峻な形状を有し、ピーク波長はλ0である。ピークPxは、計測対象物Sとは異なる部分で反射された光により発生する。ピークPxは滑らかな形状を有し、ピーク波長はλxである。 FIG. 11 is a diagram showing a received light waveform W0 including an unnecessary component. As shown in FIG. 11, the received light waveform W0 includes three peaks P0, Px, and Py. The peak P0 is generated by light reflected on the surface of the measurement target S. The peak P0 has a steep shape, and the peak wavelength is λ0. The peak Px is generated by light reflected by a portion different from the measurement target S. The peak Px has a smooth shape, and the peak wavelength is λx.
ピークPyは、計測対象物Sとは異なる部分で反射された発振波長λyの光源121(図9)の光により発生する。ピークPyは急峻な形状を有し、ピーク波長はλyである。なお、本例においては、レーザ光源である光源121により出射される励起光の強度は大きいため、励起光に相当する波長成分の光は、測定光として用いられない。
The peak Py is generated by the light of the light source 121 (FIG. 9) having the oscillation wavelength λy reflected by a portion different from the measurement target S. The peak Py has a steep shape, and the peak wavelength is λy. In this example, since the intensity of the excitation light emitted from the
ピーク波長λxはピーク波長λ0に比較的近く、ピークPxの幅は広い。そのため、ピークP0はピークPxに埋もれることとなる。この場合、ピーク波長λ0を正確に特定することは困難である。そこで、受光波形W0からピークPxに起因する部分(以下、基底波形BLと呼ぶ。)を除去するための補正が行われる。 The peak wavelength λx is relatively close to the peak wavelength λ0, and the width of the peak Px is wide. Therefore, the peak P0 is buried in the peak Px. In this case, it is difficult to accurately specify the peak wavelength λ0. Therefore, a correction for removing a portion (hereinafter, referred to as a base waveform BL) caused by the peak Px from the received light waveform W0 is performed.
図12は、受光波形W0の基底波形BLを示す図である。本実施の形態では、制御部152は、ピークPxとピークP0とを識別する低域通過フィルタ処理を受光波形W0に適用することにより、図12の基底波形BLを取得する。基底波形BLを取得する方式は上記の方式に限定されず、図1の記憶部151に基底波形BLを示すデータが予め記憶されていてもよい。この場合、制御部152は、取得した図12の基底波形BLに基づいて、図11の受光波形W0から基底波形BLを除去するように受光波形W0の補正を行う。
FIG. 12 is a diagram showing a base waveform BL of the received light waveform W0. In the present embodiment,
図13は、基底波形BLが除去された受光波形W0を示す図である。図13の例では、ピーク波長λ0が図11のピーク波長λ0よりも短波長側にわずかにシフトしている。このように、受光波形W0から基底波形BLを除去することにより、ピーク波長λ0をより正確に特定することができる。その結果、計測距離をより正確に算出することが可能になる。なお、受光波形W0のピークPyに起因する部分は、ピーク波長λ0の正確な特定に影響を与えないので、受光波形W0から除去されない。本発明はこれに限定されず、受光波形W0からピークPyに起因する部分を除去するための処理が行われてもよい。 FIG. 13 is a diagram showing the received light waveform W0 from which the base waveform BL has been removed. In the example of FIG. 13, the peak wavelength λ0 is slightly shifted to a shorter wavelength side than the peak wavelength λ0 of FIG. As described above, by removing the base waveform BL from the received light waveform W0, the peak wavelength λ0 can be specified more accurately. As a result, the measurement distance can be calculated more accurately. Note that the portion of the received light waveform W0 caused by the peak Py does not affect the accurate specification of the peak wavelength λ0, and is not removed from the received light waveform W0. The present invention is not limited to this, and a process for removing a portion caused by the peak Py from the received light waveform W0 may be performed.
(b)受光部の温度特性の補正
上記のように、特定の波長を有する光は、当該波長に対応付けられた受光部140の画素により受光される。しかしながら、周囲の温度変化に伴う受光部140の受光面の位置の変化または受光面の傾きの変化により、特定の波長を有する光が対応付けられた画素とは異なる画素により受光されることがある。この場合、計測距離を正確に算出することができない。そこで、以下に説明する受光部140の温度特性の補正が行われる。
(B) Correction of Temperature Characteristics of Light Receiving Unit As described above, light having a specific wavelength is received by a pixel of the
図14は、受光部140に導かれる光の経路を示す図である。図14に示すように、受光部140には、回折格子131により分光された1次光に加えて、回折格子131により正反射された0次光が導かれる。図14においては、1次光が実線で示され、0次光が一点鎖線で示される。0次光は、計測距離の算出には用いられない。
FIG. 14 is a diagram illustrating a path of light guided to the
図15は、図14の受光部140に導かれる光の受光波形W0を示す図である。図15の横軸は受光部140の画素の位置を示し、縦軸は受光信号の強度を示す。図15に示すように、受光波形W0は、1次光に対応する部分と0次光に対応する部分とを含む。図11の受光波形W0と同様に、1次光に対応する受光波形W0の部分には、3個のピークP0,Px,Pyが含まれる。0次光に対応する受光波形W0の部分には、1個のピークPzが含まれる。
FIG. 15 is a diagram illustrating a light receiving waveform W0 of light guided to the
図1の記憶部151には、ピークPx,Py,Pzの少なくとも1つのピークの中心が現れるべき画素の位置が基準位置として予め記憶されている。制御部152は、記憶部151に記憶された基準位置に対応するピークPx〜Pzの位置を特定する。制御部152は、特定したピークPx〜Pzの位置と基準位置とを比較することにより画素の位置のずれを算出し、算出した画素の位置のずれに基づいて受光波形W0の位置を補正する。図15には、位置が補正された後の受光波形W0が点線で示されている。
The position of the pixel where at least one of the peaks Px, Py, and Pz should appear in the
また、記憶部151には、ピークPx,Py,Pzの少なくとも2つのピークの中心が現れるべき画素の間隔が基準間隔として予め記憶されている。制御部152は、記憶部151に記憶された基準間隔に対応するピークPx〜Pzの間隔を特定する。制御部152は、特定したピークPx〜Pzの間隔と基準間隔とを比較することにより画素の間隔のずれを算出し、算出した画素の間隔のずれに基づいて受光波形W0の形状を補正する。
In addition, in the
受光部140の温度特性の補正として、画素の位置のずれに基づく受光波形W0の位置の補正および画素の間隔のずれに基づく受光波形W0の形状の補正の一方のみが行われてもよいし、両方が行われてもよい。受光部140の温度特性の補正は、上記の基底波形BLの除去よりも先に行われる。補正が行われた後の受光波形W0のピークP0を特定することにより、計測距離をより正確に算出することができる。
As the correction of the temperature characteristic of the
(5)効果
本実施の形態に係る共焦点変位計500においては、複数の波長を有する光が投光部120により出射される。投光部120により出射された光は、第1計測ヘッド200Aにおいて光照射部1により計測対象物Sの照射領域IRに順次照射される。光照射部1により計測対象物Sに照射される光には、レンズユニット220により光軸方向に沿った色収差が発生する。また、色収差を有する光はレンズユニット220により収束される。計測対象物Sの照射領域IRの複数の部分で合焦しつつ反射された波長の光が光ファイバ314を順次通過する。
(5) Effect In the
光ファイバ314を通過した複数の光は、ファイバコネクタ330、光ファイバ313、ファイバカプラ320および光ファイバ312を通して分光部130に順次導かれ、分光される。分光部130により分光された複数の光は、単一の露光期間内に受光部140により受光される。そのため、受光部140から出力される波長ごとの受光量を示す電気的な受光信号は、複数の光についての波長ごとの強度が積算された平均信号となる。これにより、複数の光の平均化処理を容易に行うことができる。平均化処理後の光の強度に基づいて、制御部152により計測対象物Sの変位が算出される。
The plurality of lights that have passed through the
計測対象物Sの表面での乱反射により、計測対象物Sの表面の位置とは異なる位置で合焦した光が光ファイバ314を通過することがある。そのような場合でも、上記の構成によれば、平均化処理において光ファイバ314を通過した複数の光についての波長ごとの強度が平均される。それにより、乱反射によるランダムな計測誤差を発生させる光の成分が打ち消される。その結果、共焦点変位計500により計測される計測対象物Sの変位の誤差を低減することができる。また、この構成においては、平均化処理を行うための演算を行う必要がない。これにより、計測対象物Sの変位を効率よく算出することができる。
Light focused at a position different from the position of the surface of the measurement target S may pass through the
また、本実施の形態においては、光ファイバ314の先端部分がピンホールとして機能する。この場合、ピンホールを別個に配置する必要がない。これにより、共焦点変位計500の構成をコンパクトにすることができる。
Further, in the present embodiment, the tip portion of the
このように、光ファイバ314のクラッド310bを遮光部(ピンホール部材)とし、コア310aをピンホールとすることが好ましい。これにより、簡易な構成で共焦点光学系を実現することができる。一方で、光の損失を許容できる場合には、遮光性を有する板に複数のピンホールを設けた遮光部材を計測ヘッド200側における光ファイバ314の端部に配置してもよい。
As described above, it is preferable that the clad 310b of the
さらに、本実施の形態においては、処理装置100と第1計測ヘッド200Aとが別体的に設けられ、導光部300により光学的に接続される。そのため、計測対象物Sの形状もしくは配置等に応じて適切な色収差を発生させるレンズユニット220または適切な焦点距離を有するレンズユニット220を含む第1計測ヘッド200Aを用いることが容易になる。これにより、計測対象物Sの変位をより容易に計測することができる。
Further, in the present embodiment, the
また、第2計測ヘッド200Bには、光路上に第1計測ヘッド200Aの平板部材230と同様の平板部材230が配置される。この構成によれば、第2計測ヘッド200Bにおける光路の長さを第1計測ヘッド200Aにおける光路の長さに容易に一致させることができる。そのため、第1計測ヘッド200Aを用いた共焦点光学系と第2計測ヘッド200Bを用いた共焦点光学系とを独立に構成することが容易になる。
Further, a
また、導光部300が光ファイバを含むことにより、処理装置100と計測ヘッド200とを離間して配置することができる。第2計測ヘッド200Bには機械駆動する部品は設けられず、発熱源が存在しない。そのため、第2計測ヘッド200Bを多様な環境に配置することができる。また、後述するように、計測ヘッド200の露出する部分をガラスにより形成することにより、計測ヘッド200をより多様な環境に配置することができる。
In addition, since the
光源121としてレーザ光源を用いる場合には、導光部300が光ファイバを含むことが好ましい。例えば、図9に示すように、光源121により出射されるレーザ光により蛍光体122を励起し、複数の波長を有する光を生成する場合には、光ファイバを用いることにより生成された光を効率よく抽出することができる。また、光ファイバを用いることにより、抽出された光を計測ヘッド200に効率よく供給できる。
When a laser light source is used as the
(6)変形例
(a)駆動部の変形例
本実施の形態において、駆動部240が中空モータにより実現されるが、本発明はこれに限定されない。駆動部240は、平板部材230を移動させることが可能な他のアクチュエータにより実現されてもよいし、他の構成により実現されてもよい。図16は、駆動部240の第1の変形例を示す部分縦断面図である。図16に示すように、第1の変形例における駆動部240は、モータ243および2個のロータ244,245を含む。
(6) Modification Example (a) Modification Example of Driving Unit In the present embodiment, the driving
ロータ244は、円柱状を有し、モータ243に取り付けられる。ロータ244の外周面にはマグネット244Mが設けられる。ロータ245は円筒状を有し、ロータ245の内周面にはマグネット245Mが設けられる。ロータ245は、マグネット245Mとマグネット244Mとが離間しかつ引力を及ぼし合う状態で対向するようにロータ244と共通の軸上に配置され、図示しないベアリングにより保持される。これにより、ロータ245は、ロータ244と離間した状態でかつ回転可能にロータ244と磁力的に結合される。
The
光ファイバ314の端部は、例えば図示しないフェルールに挿入された状態で、ロータ244とロータ245との間を通してロータ245の中空部分に固定される。平板部材230は、入射面231および出射面232が光ファイバ314の光軸に直交する面に対して傾斜した状態でロータ245の端部に取り付けられる。この構成によれば、モータ243が回転することにより、ロータ244,245および平板部材230が回転する。これにより、第1計測ヘッド200Aから出射される光の光軸をシフトさせることができる。
The end of the
駆動部240の第1の変形例において、ロータ244とロータ245とが磁力的に結合されるが、本発明はこれに限定されない。ロータ244とロータ245とが電気的に結合されてもよいし、非接触方式の他の力により結合されてもよい。
In the first modified example of the
図17は、駆動部240の第2の変形例を示す部分縦断面図である。第2の変形例における駆動部240について、第1の変形例における駆動部240と異なる点を説明する。図17に示すように、第2の変形例における駆動部240は、マグネット244M,245Mに代えて、動力伝達部材246を含む。ロータ244とロータ245とは、略平行な異なる軸上に配置される。動力伝達部材246は、例えばベルトであり、ロータ244,245に架け渡される。これにより、ロータ245は、ロータ244と機械的に結合される。
FIG. 17 is a partial vertical sectional view showing a second modification of the
この構成によれば、モータ243が回転することにより、ロータ244,245および平板部材230が回転する。これにより、第1計測ヘッド200Aから出射される光の光軸をシフトさせることができる。駆動部240の第2の変形例において、動力伝達部材246はベルトにより実現されるが、本発明はこれに限定されない。動力伝達部材246は、チェーンにより実現されてもよいし、ロータ244の回転力をロータ245に伝達するように配置された1または複数のギアであってもよいし、他の部材であってもよい。
According to this configuration, when the
(b)レンズユニットの変形例
本実施の形態において、レンズユニット220は屈折レンズ221および回折レンズ222を含むが、本発明はこれに限定されない。レンズユニット220は屈折レンズ221および回折レンズ222の一方または両方を含まなくてもよい。図18(a)〜(d)は、レンズユニット220の第1〜第4の変形例を示す図である。
(B) Modification of Lens Unit In the present embodiment, the
図18(a)に示すように、第1の変形例におけるレンズユニット220は、図1の屈折レンズ221を含まずに回折レンズ222および対物レンズ223を含む。図18(b)に示すように、第2の変形例におけるレンズユニット220は、第1の変形例と同様に、図1の屈折レンズ221を含まずに回折レンズ222および対物レンズ223を含む。第2の変形例においては、回折レンズ222および対物レンズ223は、第1の変形例における回折レンズ222および対物レンズ223の位置とは逆に配置される。
As shown in FIG. 18A, the
図18(c)に示すように、第3の変形例におけるレンズユニット220は、第1の変形例の回折レンズ222に代えて、ダブレットレンズ224を含む。図18(d)に示すように、第4の変形例におけるレンズユニット220は、第2の変形例の回折レンズ222に代えて、ダブレットレンズ224を含む。
As shown in FIG. 18C, a
このように、レンズユニット220は、例えば回折レンズ、ダブレットレンズ、GRIN(グレーデッドインデックス)レンズもしくはプリズムまたはこれらの組み合わせにより構成されてもよい。これらのレンズユニット220の構成によれば、投光部120により出射された光に光軸方向に沿った色収差を発生させるとともに、色収差を有する光を収束させて計測対象物Sに照射することができる。
As described above, the
上記のレンズは、ガラスレンズであってもよいし、樹脂レンズであってもよいし、ガラスが樹脂加工されたレンズであってもよい。ガラスレンズは、高い耐熱性を有する。樹脂レンズは、安価に製造することができる。ガラスが樹脂加工されたレンズは、比較的安価に製造することができかつ比較的高い耐熱性を有する。 The above-described lens may be a glass lens, a resin lens, or a lens in which glass is processed with resin. Glass lenses have high heat resistance. The resin lens can be manufactured at low cost. Lenses in which glass is processed with resin can be manufactured relatively inexpensively and have relatively high heat resistance.
また、レンズユニット220のうち、計測対象物Sに最も近いレンズは、ガラスにより形成されることが好ましい。計測ヘッド200は、工場等の製造ラインにおいては、水分または油分等が存在する環境に配置される。レンズ等の計測ヘッド200の外部に露出している部分の光学系をガラスにより形成することにより、計測ヘッド200の耐油性、耐水性および耐汚染性を向上させることができる。
Further, it is preferable that the lens of the
同様に、レンズユニット220の光学系のうち、外気に露出する部分をガラスにより形成することが好ましい。あるいは、屈折レンズ221、回折レンズ222、対物レンズ223またはダブレットレンズ224がガラスではなく、樹脂により形成され、レンズユニット220の外気に露出する部分がガラスにより構成されてもよい。例えば、図18(b)の例においては、回折レンズ222の下側(計測対象物S側)にカバーガラスが設けられてもよい。
Similarly, it is preferable that a portion of the optical system of the
(c)投光部の変形例
本実施の形態において、光源121から出射される光の光軸とフェルール123の中心軸とが一直線上に配置されるが、本発明はこれに限定されない。図19は、投光部120の変形例を示す図である。図19に示すように、変形例における投光部120は、光源121、蛍光体122、フェルール123、レンズ124,128および反射部材129を含む。レンズ124は、光源121と反射部材129との間に配置される。レンズ128は、反射部材129とフェルール123との間に配置される。蛍光体122は、反射部材129の反射面に塗布される。
(C) Modified Example of Light Projecting Unit In the present embodiment, the optical axis of light emitted from
光源121により出射された光は、レンズ124を通過することにより、励起光として反射部材129に塗布された蛍光体122上に集光される。蛍光体122は、励起光を吸収して蛍光を放出する。ここで、蛍光体122に吸収されずに透過した励起光と蛍光体122からの蛍光とが混合されることにより、広い波長帯域の光が生成される。生成された光は、反射部材129の反射面で反射されることにより、レンズ128を通してフェルール123に導かれる。これにより、光ファイバ311に光が入力される。この構成においては、光学素子の配置の自由度が大きくなる。そのため、投光部120を小型化することが容易になる。
The light emitted by the
投光部120により生成される光の強度を増加させるために、光源121により出射される光の光量を大きくすることが好ましい。一方で、光源121からの光の光量を大きくすると、蛍光体122の発熱が大きくなることにより、反射部材129の反射効率が低下するとともに、蛍光体122からの蛍光の放出が飽和しやすくなる。そこで、反射部材129が回転または移動可能に構成されてもよい。これにより、蛍光体122が冷却され、発熱を抑制することができる。その結果、投光部120により生成される光の強度をより増加させることができる。
In order to increase the intensity of light generated by the
(d)分光部の変形例
本実施の形態において、分光部130の回折格子131は反射型を有するが、本発明はこれに限定されない。図20は、分光部130の変形例を示す図である。図20に示すように、分光部130の変形例においては、回折格子131は透過型を有する。回折格子131に入射された光は、波長ごとに異なる角度で透過するように分光される。回折格子131により分光された光は、レンズ133を通過することにより波長ごとに異なる受光部140の画素の位置に合焦される。
(D) Modified Example of Dispersing Unit In the present embodiment, the
(7)他の実施の形態
(a)上記実施の形態において、導光部300は光ファイバを含み、光ファイバを用いて処理装置100と計測ヘッド200との間で光が伝送されるが、本発明はこれに限定されない。導光部300は光ファイバを含まず、ミラーおよびハーフミラー等の光学素子を用いて処理装置100と計測ヘッド200との間で光が伝送されてもよい。
(7) Other Embodiments (a) In the above embodiment, the
図21は、他の実施の形態に係る共焦点変位計の構成を示す模式図である。図21においては、図21に示すように、導光部300は、図1の光ファイバ311〜314、ファイバカプラ320およびファイバコネクタ330に代えて、ハーフミラー371および複数(本例では2個)の空間フィルタ372,373を含む。空間フィルタ372,373には、ピンホール372a,373aがそれぞれ形成される。
FIG. 21 is a schematic diagram showing a configuration of a confocal displacement meter according to another embodiment. In FIG. 21, as shown in FIG. 21, the
投光部120から出射された光は、空間フィルタ372のピンホール372aを通過した後、ハーフミラー371を通過する。ハーフミラー371を通過した光は、平板部材230およびレンズユニット220を通して計測対象物Sに照射される。計測対象物Sの表面で反射された光の一部は、平板部材230およびレンズユニット220を通過し、ハーフミラー371により反射される。ハーフミラー371により反射された光は、空間フィルタ373のピンホール373aを通過して分光部130に導かれる。受光部140は、分光部130により分光された光を受光し、受光信号を出力する。
The light emitted from the
演算処理部150は、受光部140により出力される受光信号に基づいて、平均化処理が行われた受光波形W0を取得する。このように、受光波形W0の平均化処理が行われることにより、乱反射によるランダムな計測誤差を発生させる光の成分が打ち消される。受光波形W0のピーク波長λ0を特定することにより、計測距離をより正確に特定することができる。
The
(b)上記実施の形態において、図9または図19の投光部120は光源121からの励起光と蛍光体122からの蛍光とを混合することにより広い波長帯域の光を出射するが、本発明はこれに限定されない。投光部120は、光源121および蛍光体122に代えて、広い波長帯域の光を出射する光源を含んでもよい。例えば、投光部120は、光源として白色光を出射するLED(発光ダイオード)またはハロゲンランプを含んでもよい。
(B) In the above embodiment, the
(c)上記実施の形態において、投光部120は連続的な波長を有する波長500nm〜700nmの光を出射するが、本発明はこれに限定されない。投光部120は連続的な波長を有する他の波長帯域の光を出射してもよい。例えば、投光部120は連続的な波長を有する赤外領域の光を出射してもよいし、連続的な波長を有する紫外領域の光を出射してもよい。
(C) In the above embodiment, the
(d)上記実施の形態において、処理装置100と計測ヘッド200とが別体として構成されるが、本発明はこれに限定されない。処理装置100と計測ヘッド200とが一体的に構成されてもよい。
(D) In the above embodiment, the
(e)上記実施の形態において、ファイバカプラ320を用いて光の結合および分岐が行われるが、本発明はこれに限定されない。ファイバカプラ320が用いられず、複数のコア310aが1つに融着された複数の光ファイバ311〜313を用いて光の結合および分岐が行われてもよい。
(E) In the above embodiment, light is coupled and branched using the fiber coupler 320, but the present invention is not limited to this. Instead of using the fiber coupler 320, the coupling and branching of light may be performed using a plurality of
(f)上記実施の形態において、受光波形W0の平均化処理として光学的な積算処理が行われるが、本発明はこれに限定されない。受光波形W0の平均化処理として、電気的な積算処理、平均処理または加重平均処理が行われてもよいし、他の処理が行われてもよい。 (F) In the above embodiment, optical integration processing is performed as averaging processing of the received light waveform W0, but the present invention is not limited to this. As the averaging process of the received light waveform W0, an electrical integration process, an averaging process, or a weighted averaging process may be performed, or another process may be performed.
例えば、受光部140は、分光部130により順次分光された複数の光を順次受光し、順次受光された複数の光の各々について受光信号を出力してもよい。この場合、制御部152は、受光部140から出力される複数の受光信号を波長ごとに平均または積算等することにより波長ごとの信号強度として平均信号を算出し、算出された平均信号に基づいて計測対象物Sの変位を算出することができる。
For example, the
あるいは、受光部140は、分光部130により順次分光された複数の光を複数の露光期間内に受光し、各露光期間内に受光した光について受光信号を出力してもよい。この場合、制御部152は、受光部140から出力される複数の受光信号を波長ごとに平均または積算等することにより波長ごとの信号強度として平均信号を算出し、算出された平均信号に基づいて計測対象物Sの変位を算出することができる。これらの構成によれば、平均信号の算出において、複数の光の強度を考慮した所望の演算を行うことができる。これにより、計測対象物Sの変位をより正確に算出することができる。
Alternatively, the
(g)上記実施の形態において、平板部材230は光ファイバ314とレンズユニット220との間に配置されるが、本発明はこれに限定されない。平板部材230は、光路上におけるいずれの位置に配置されてもよい。
(G) In the above embodiment, the
(h)上記実施の形態において、共焦点変位計500は、第1計測ヘッド200Aおよび第2計測ヘッド200Bの両方を含むが、本発明はこれに限定されない。共焦点変位計500は、第1計測ヘッド200Aを含み、第2計測ヘッド200Bを含まなくてもよい。あるいは、乱反射の程度が小さい計測対象物Sの変位を計測する場合には、光照射部1の駆動部240の回転を停止させた状態で第1計測ヘッド200Aを用いてもよい。この場合、第1計測ヘッド200Aを用いた変位計測の原理は第2計測ヘッド200Bを用いた変位計測の原理と同一である。
(H) In the above embodiment, the
(8)請求項の各構成要素と実施の形態の各部との対応関係
以下、請求項の各構成要素と実施の形態の各部との対応の例について説明するが、本発明は下記の例に限定されない。
(8) Correspondence relationship between each component of the claims and each unit of the embodiment Hereinafter, an example of correspondence between each component of the claims and each unit of the embodiment will be described. Not limited.
上記実施の形態では、計測対象物Sが計測対象物の例であり、共焦点変位計500が共焦点変位計の例であり、投光部120が投光部の例であり、光照射部1が光照射部の例である。分光部130、受光部140および演算処理部150が変位計測部の例であり、分光部130が分光部の例であり、受光部140が受光部の例であり、演算処理部150が算出部の例であり、照射領域IRが領域の例である。駆動部240が駆動部の例であり、処理装置100が処理装置の例であり、電力供給部160が電力供給部の例であり、光ファイバ314が光ファイバの例であり、コア310aがコアの例であり、光源121が光源の例であり、蛍光体122が蛍光体の例である。
In the above embodiment, the measurement object S is an example of the measurement object, the
第1計測ヘッド200Aおよび第2計測ヘッド200Bがそれぞれ第1および第2のヘッド部の例であり、第1計測ヘッド200Aのレンズユニット220が第1の光学部材の例である。第2計測ヘッド200Bのレンズユニット220が第2の光学部材の例であり、第1計測ヘッド200Aの光ファイバ314または空間フィルタ373が第1のピンホール部材の例である。第2計測ヘッド200Bの光ファイバ314または空間フィルタ373が第2のピンホール部材の例であり、第1計測ヘッド200Aの光ファイバ314の先端部分またはピンホール373aが第1のピンホールの例である。
The
第2計測ヘッド200Bの光ファイバ314の先端部分またはピンホール373aが第2のピンホールの例であり、第1計測ヘッド200Aの平板部材230が第1の透光部の例であり、第2計測ヘッド200Bの平板部材230が第2の透光部の例である。第1計測ヘッド200Aの平板部材230の入射面231および出射面232がそれぞれ第1および第2の面の例であり、第2計測ヘッド200Bの平板部材230の入射面231および出射面232がそれぞれ第3および第4の面の例である。筐体110が第1の筐体の例であり、第1計測ヘッド200Aの筐体210が第2の筐体の例であり、第2計測ヘッド200Bの筐体210が第3の筐体の例である。
The tip portion or the
請求項の各構成要素として、請求項に記載されている構成または機能を有する他の種々の要素を用いることもできる。 Various other elements having the configuration or function described in the claims may be used as the constituent elements in the claims.
本発明は、種々の共焦点変位計に有効に利用することができる。 The present invention can be effectively used for various confocal displacement meters.
1 光照射部
100 処理装置
110,210 筐体
120 投光部
121 光源
122 蛍光体
123 フェルール
124,128,132,133 レンズ
125 保持具
126 フィルタ素子
127 素子ホルダ
127A 光源固定部
127B フェルール固定部
127C レンズ固定部
129 反射部材
130 分光部
131 回折格子
140 受光部
150 演算処理部
151 記憶部
152 制御部
160 電力供給部
170 表示部
200 計測ヘッド
200A 第1計測ヘッド
200B 第2計測ヘッド
220 レンズユニット
221 屈折レンズ
222 回折レンズ
223 対物レンズ
224 ダブレットレンズ
230 平板部材
231 入射面
232 出射面
240 駆動部
241 固定部
242 回転軸
243 モータ
244,245 ロータ
244M,245M マグネット
246 動力伝達部材
300 導光部
310a コア
310b クラッド
311〜314 光ファイバ
320 ファイバカプラ
321〜323,331,332 ポート
324,333 本体部
330 ファイバコネクタ
371 ハーフミラー
372,373 空間フィルタ
372a,373a ピンホール
400 制御装置
401 表示装置
402 操作部
403 CPU
404 メモリ
491 切替ボタン
500 共焦点変位計
BL 基底波形
IR 照射領域
MR 計測範囲
OD 外径
P0,Px〜Pz ピーク
P1,P2 合焦位置
RP 基準位置
S 計測対象物
W0〜W4 受光波形
λ0〜λ4,λx,λy ピーク波長
404
Claims (14)
複数の波長を有する光を出射する投光部と、
前記投光部により出射された光の第1の光路上に設けられ、前記投光部により出射された光の光軸を順次シフトすることにより前記計測対象物に照射される光を当該光の光軸と直交する方向に順次シフトさせて、前記計測対象物の連続的または断続的な複数の部分に順次照射する光照射部と、
前記光照射部により前記計測対象物に照射される光に光軸方向に沿った色収差を発生させるとともに、色収差を有する光を収束させる第1の光学部材と、
前記計測対象物の前記複数の部分で合焦しつつ反射された波長の光を順次通過させる第1のピンホールを有する第1のピンホール部材と、
前記第1のピンホールを順次通過した前記複数の部分に対応する複数の光についての波長ごとの強度の平均に対応する平均信号の波長ごとの信号強度に基づいて前記計測対象物の変位を算出する変位計測部とを備える、共焦点変位計。 A confocal displacement meter that measures a displacement of a measurement object using a confocal optical system,
A light emitting unit that emits light having a plurality of wavelengths,
The light emitted from the light projecting unit is provided on a first optical path, and the light emitted to the object to be measured is shifted by sequentially shifting the optical axis of the light emitted by the light projecting unit. A light irradiation unit that sequentially shifts in a direction orthogonal to the optical axis to sequentially irradiate a plurality of continuous or intermittent portions of the measurement object,
A first optical member that generates chromatic aberration along the optical axis direction in light irradiated on the measurement object by the light irradiation unit, and converges light having chromatic aberration;
A first pinhole member having a first pinhole that sequentially passes light having a wavelength reflected while being focused on the plurality of portions of the measurement object,
The displacement of the measurement object is calculated based on the signal intensity for each wavelength of the average signal corresponding to the average of the intensity for each wavelength of the plurality of lights corresponding to the plurality of portions sequentially passing through the first pinhole. A confocal displacement meter, comprising:
前記第1のピンホールを順次通過した前記複数の部分に対応する複数の光を順次分光する分光部と、
前記分光部により順次分光された前記複数の部分に対応する複数の光を単一の露光期間内に受光し、前記受光した光について波長ごとの受光量を示す電気的な受光信号を前記平均信号として出力する受光部と、
前記平均信号に基づいて前記計測対象物の変位を算出する算出部とを含む、請求項1記載の共焦点変位計。 The displacement measuring unit,
A light splitting unit that sequentially splits a plurality of lights corresponding to the plurality of portions that sequentially pass through the first pinhole;
A plurality of light receiving in a single exposure period, electrical receiving signal to the average signal indicating the received light amount for each wavelength for the received light corresponding to said plurality of portions are sequentially split by the spectroscopic unit A light-receiving unit that outputs as
The confocal displacement meter according to claim 1, further comprising: a calculating unit that calculates a displacement of the measurement target based on the average signal.
前記第1のピンホールを順次通過した複数の光を順次分光する分光部と、
前記分光部により順次分光された複数の光を順次受光し、順次受光された複数の光の各々について波長ごとの受光量を示す電気的な受光信号を出力する受光部と、
前記受光部から出力される複数の受光信号を波長ごとに平均または積算することにより前記波長ごとの信号強度として前記平均信号を算出し、前記平均信号に基づいて前記計測対象物の変位を算出する算出部とを含む、請求項1記載の共焦点変位計。 The displacement measuring unit,
A spectroscopy unit for sequentially separating a plurality of lights sequentially passing through the first pinhole;
A light receiving unit that sequentially receives a plurality of lights sequentially split by the splitting unit and outputs an electric light receiving signal indicating a received light amount for each wavelength for each of the plurality of sequentially received lights,
Wherein calculating the average signal a plurality of light receiving signals output from the light receiving unit as a signal strength for each of the wavelengths by averaging or integrating for each wavelength, and calculates the displacement of the measurement object based on the average signal The confocal displacement meter according to claim 1, further comprising a calculating unit.
前記第1のピンホールを順次通過した前記複数の部分に対応する複数の光を順次分光する分光部と、
前記分光部により順次分光された前記複数の部分に対応する複数の光を複数の露光期間内に受光し、前記複数の露光期間において受光した光について波長ごとの受光量を示す電気的な受光信号を出力する受光部と、
前記受光部から出力される前記複数の露光期間に対応する複数の受光信号を波長ごとに平均または積算することにより前記波長ごとの信号強度として前記平均信号を算出し、前記平均信号に基づいて前記計測対象物の変位を算出する算出部とを含む、請求項1記載の共焦点変位計。 The displacement measuring unit,
A light splitting unit that sequentially splits a plurality of lights corresponding to the plurality of portions that sequentially pass through the first pinhole;
An electrical light receiving signal that receives a plurality of lights corresponding to the plurality of portions sequentially divided by the spectroscopic unit within a plurality of exposure periods , and indicates a light reception amount for each wavelength of the light received in the plurality of exposure periods; A light receiving unit that outputs
Wherein calculating the average signal as the signal strength for each of the wavelengths by averaging or integrating a plurality of light receiving signals corresponding to the plurality of exposure periods output from the light receiving unit for each wavelength, on the basis of the said average signal The confocal displacement meter according to claim 1, further comprising a calculating unit that calculates a displacement of the measurement target.
透光性を有する部材により形成されるとともに、第1および第2の面を有する第1の透光部と、
駆動部とを含み
前記第1の透光部の前記第1および第2の面のうち少なくとも一方の面は、前記投光部により出射された光の前記第1の光路に直交する面に対して傾斜する状態で前記第1の光路上に配置され、
前記駆動部は、前記第1の光路に交差する面内で前記第1の透光部の前記第1および第2の面を回転させるように構成される、請求項5〜7のいずれか一項に記載の共焦点変位計。 The light irradiation unit,
A first light-transmitting portion formed of a light-transmitting member and having first and second surfaces;
And a driving unit, wherein at least one of the first and second surfaces of the first light transmitting unit is disposed on a surface orthogonal to the first optical path of the light emitted by the light projecting unit. Disposed on the first optical path in a state of being inclined,
The driving unit according to claim 5, wherein the driving unit is configured to rotate the first and second surfaces of the first light transmitting unit in a plane intersecting the first optical path. The confocal displacement meter according to the paragraph.
第1のヘッド部とをさらに備え、
前記処理装置は、前記投光部および前記変位計測部を含むとともに、前記投光部および前記変位計測部を収容する第1の筐体をさらに含み、
前記第1のヘッド部は、前記光照射部および前記第1の光学部材を含むとともに、前記光照射部および前記第1の光学部材を収容する第2の筐体をさらに含む、請求項8記載の共焦点変位計。 A processing unit;
And a first head unit,
The processing device includes the light emitting unit and the displacement measuring unit, and further includes a first housing that houses the light emitting unit and the displacement measuring unit,
The said 1st head part contains the said light irradiation part and the said 1st optical member, and further includes the 2nd housing | casing which accommodates the said light irradiation part and the said 1st optical member. Confocal displacement meter.
前記電力供給部は、前記第1のヘッド部の前記駆動部に電力を供給可能に前記光照射部に接続される、請求項9記載の共焦点変位計。 The processing device further includes a power supply unit housed in the first housing,
The confocal displacement meter according to claim 9, wherein the power supply unit is connected to the light irradiation unit so as to be able to supply power to the driving unit of the first head unit.
第2のピンホールを有する第2のピンホール部材とをさらに備え、
前記第2のヘッド部は、
前記投光部により出射された光に光軸方向に沿った色収差を発生させるとともに、色収差を有する光を収束させて前記計測対象物に照射する第2の光学部材と、
透光性を有する部材により形成されるとともに、第3および第4の面を有する第2の透光部と、
前記第2の光学部材および前記第2の透光部を収容する第3の筐体とを含み、
前記第2の透光部の前記第3および第4の面のうち少なくとも一方の面は、前記投光部により出射された光の第2の光路に直交する面に対して傾斜する状態で前記第2の光路上に配置され、
前記第2のピンホールは、前記第2のヘッド部の前記第2の光学部材により前記計測対象物の表面で合焦しつつ反射された波長の光を通過させ、
前記変位計測部は、前記第2のピンホールを通過した光についての波長ごとの信号強度に基づいて前記計測対象物の変位を算出し、
前記投光部により出射された光は、前記第1のヘッド部と前記第2のヘッド部とに選択的に導かれる、請求項9または10記載の共焦点変位計。 A second head portion;
A second pinhole member having a second pinhole,
The second head section includes:
A second optical member that generates chromatic aberration along the optical axis direction in the light emitted by the light projecting unit, and converges the light having chromatic aberration to irradiate the measurement target object,
A second light-transmitting portion formed of a light-transmitting member and having third and fourth surfaces;
A third housing accommodating the second optical member and the second light transmitting unit,
At least one of the third and fourth surfaces of the second light-transmitting portion is inclined with respect to a surface orthogonal to a second optical path of the light emitted by the light projecting portion. Disposed on the second optical path,
The second pinhole allows light of a wavelength reflected by the second optical member of the second head portion while being focused on the surface of the measurement target,
The displacement measuring unit calculates a displacement of the measurement target based on a signal intensity for each wavelength of light that has passed through the second pinhole,
The confocal displacement meter according to claim 9, wherein the light emitted by the light projecting unit is selectively guided to the first head unit and the second head unit.
前記光ファイバは、前記投光部により出射された光を前記第1の光学部材に導くとともに、前記計測対象物の前記複数の部分で反射されることにより前記第1のピンホールを順次通過した複数の光を前記変位計測部に導くように設けられる、請求項1〜11のいずれか一項に記載の共焦点変位計。 Further comprising an optical fiber,
The optical fiber guides the light emitted by the light projecting unit to the first optical member, and sequentially passes through the first pinhole by being reflected by the plurality of portions of the measurement object. The confocal displacement meter according to claim 1, wherein the confocal displacement meter is provided to guide a plurality of lights to the displacement measurement unit.
単一波長の光を出射する光源と、
前記光源により出射された光を吸収して前記光源により出射された光の波長とは異なる波長の光を放出する蛍光体とを含む、請求項1〜13のいずれか一項に記載の共焦点変位計。 The light emitting unit is
A light source that emits light of a single wavelength,
14. A confocal according to claim 1, further comprising: a phosphor that absorbs light emitted by the light source and emits light having a wavelength different from the wavelength of the light emitted by the light source. Displacement gauge.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015254805A JP6654893B2 (en) | 2015-12-25 | 2015-12-25 | Confocal displacement meter |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015254805A JP6654893B2 (en) | 2015-12-25 | 2015-12-25 | Confocal displacement meter |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017116492A JP2017116492A (en) | 2017-06-29 |
| JP6654893B2 true JP6654893B2 (en) | 2020-02-26 |
Family
ID=59234397
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015254805A Active JP6654893B2 (en) | 2015-12-25 | 2015-12-25 | Confocal displacement meter |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6654893B2 (en) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6880508B2 (en) * | 2017-10-02 | 2021-06-02 | オムロン株式会社 | The sensor head |
| WO2020059677A1 (en) * | 2018-09-18 | 2020-03-26 | オムロン株式会社 | Optical measuring device |
| FR3086748B1 (en) * | 2018-10-02 | 2023-10-13 | Sciences Et Techniques Ind De La Lumiere | OPTICAL COMPARATOR WITH DYNAMIZATION OF THE MEASURING POINT |
| JP7031626B2 (en) * | 2019-03-13 | 2022-03-08 | オムロン株式会社 | The sensor head |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000074622A (en) * | 1998-08-27 | 2000-03-14 | Murata Mfg Co Ltd | Method and instrument for displacement measurement |
| JP2006133058A (en) * | 2004-11-05 | 2006-05-25 | Canon Inc | Point diffraction interference measuring device |
| US20090284748A1 (en) * | 2007-02-13 | 2009-11-19 | Paul Melman | Speckle Noise Reduction in Coherent Imaging Systems |
| JP5790178B2 (en) * | 2011-03-14 | 2015-10-07 | オムロン株式会社 | Confocal measuring device |
| JP6044315B2 (en) * | 2012-12-12 | 2016-12-14 | オムロン株式会社 | Displacement measuring method and displacement measuring apparatus |
-
2015
- 2015-12-25 JP JP2015254805A patent/JP6654893B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017116492A (en) | 2017-06-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6997277B2 (en) | Confocal displacement meter | |
| JP6972273B2 (en) | Confocal displacement meter | |
| TWI452256B (en) | Confocal measuring device | |
| US10682044B2 (en) | Spectrally encoded forward view and spectrally encoded multi-view endoscope using back-reflected light between reflective surfaces | |
| JP7010589B2 (en) | Multi-wavelength confocal measuring device | |
| KR101750188B1 (en) | Confocal measurement device | |
| JP6615604B2 (en) | Confocal displacement meter | |
| JP6654893B2 (en) | Confocal displacement meter | |
| JP2019527576A (en) | Spectral encoding probe | |
| CN109084686B (en) | Confocal displacement sensor | |
| JP6875489B2 (en) | Confocal displacement meter | |
| JP7076954B2 (en) | Confocal displacement meter | |
| WO2019188264A1 (en) | Light irradiating device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180831 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190619 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190702 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190828 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191023 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191113 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200107 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200131 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6654893 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |