JP6638327B2 - robot - Google Patents
robot Download PDFInfo
- Publication number
- JP6638327B2 JP6638327B2 JP2015213927A JP2015213927A JP6638327B2 JP 6638327 B2 JP6638327 B2 JP 6638327B2 JP 2015213927 A JP2015213927 A JP 2015213927A JP 2015213927 A JP2015213927 A JP 2015213927A JP 6638327 B2 JP6638327 B2 JP 6638327B2
- Authority
- JP
- Japan
- Prior art keywords
- arm
- robot
- rotation axis
- axial direction
- state
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



















Description
本発明は、ロボットに関するものである。 The present invention relates to a robot.
従来、ロボットアームを備えたロボットが知られている。ロボットアームは複数のアーム(アーム部材)が関節部を介して連結され、最も先端側(最も下流側)のアームには、エンドエフェクターとして、例えば、ハンドが装着される。関節部はモーターにより駆動され、その関節部の駆動により、アームが回動する。そして、ロボットは、例えば、ハンドで対象物を把持し、その対象物を所定の場所へ移動させ、組立等の所定の作業を行う。 Conventionally, a robot provided with a robot arm is known. In the robot arm, a plurality of arms (arm members) are connected via joints, and a hand, for example, is attached to the most distal end (most downstream side) as an end effector. The joint is driven by a motor, and the arm rotates by driving the joint. Then, for example, the robot grips the target object with a hand, moves the target object to a predetermined place, and performs a predetermined operation such as assembly.
このようなロボットとして、特許文献1には、垂直多関節ロボットが開示されている。特許文献1に記載のロボットでは、基台に対してハンドを、最も基端側(最も上流側)の回動軸(鉛直方向に延びる回動軸)である第1回動軸周りに180°異なる位置に移動させる動作は、基台に対して最も基端側(基台側)のアームである第1アームを、前記第1回動軸周りに回動させることにより行う構成になっている。
As such a robot,
特許文献1に記載のロボットでは、ハンドを基台に対して第1回動軸周りに180°異なる位置に移動させる場合に、ロボットが干渉しないようにするための大きな空間を必要とする。
The robot described in
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の本発明により実現することが可能である。 SUMMARY An advantage of some aspects of the invention is to solve at least a part of the problems described above, and the invention can be implemented by the following aspects of the invention.
本発明のロボットは、少なくとも1つのアームで構成され、基台に回動可能に設けられた第1部材と、
前記第1部材とは異なる少なくとも1つのアームで構成され、前記第1部材に回動可能に設けられた第2部材と、
前記第1部材および前記第2部材とは異なる少なくとも1つのアームで構成され、前記第2部材に回動可能に設けられた第3部材と、
前記第1部材、前記第2部材および前記第3部材とは異なる少なくとも1つのアームで構成され、前記第3部材に回動可能に設けられた第4部材と、を有するロボットアームを備え、
前記第4部材は、前記基台に対する前記第1部材の回動軸の軸方向とは異なる軸方向の回転軸で回動可能なアームを有し、
前記第1部材に対する前記第2部材の回動軸の軸方向から見て、前記第1部材と前記第2部材と前記第3部材とが重なる第1状態になることが可能であり、
前記第1状態において、前記基台に対する前記第1部材の回動軸の軸方向から見たとき、前記ロボットアームの先端および前記ロボットアームの先端に設けられたエンドエフェクターのうちの少なくとも一方が前記第2部材と重なる第2状態となることが可能であることを特徴とする。
A robot according to the present invention includes a first member configured of at least one arm and rotatably provided on a base.
A second member configured of at least one arm different from the first member and rotatably provided on the first member;
A third member configured of at least one arm different from the first member and the second member, and rotatably provided on the second member;
A robot arm comprising a first member, at least one arm different from the second member and the third member, and a fourth member rotatably provided on the third member.
The fourth member has an arm that is rotatable about a rotation axis that is different from the rotation axis of the first member with respect to the base.
When viewed from the axial direction of the rotation axis of the second member with respect to the first member, it is possible to enter a first state in which the first member, the second member, and the third member overlap,
In the first state, when viewed from an axial direction of a rotation axis of the first member with respect to the base, at least one of a tip of the robot arm and an end effector provided at a tip of the robot arm has the It is characterized in that it is possible to enter a second state overlapping with the second member.
このようなロボットによれば、第1状態になることが可能であるため、ロボットが干渉しないようにするための空間を小さくすることができる。さらに、本発明のロボットでは、第2状態となることが可能であるため、第1状態の際に形成される第2部材の基台とは反対側の領域(以下、「先端領域」ともいう)において、ロボットアームの先端およびエンドエフェクターが動作できる範囲を広くとることができる。 According to such a robot, it is possible to enter the first state, so that the space for preventing the robot from interfering can be reduced. Furthermore, in the robot of the present invention, since the robot can be in the second state, a region on the opposite side to the base of the second member formed in the first state (hereinafter, also referred to as a “tip region”). In (1), the range in which the tip of the robot arm and the end effector can operate can be widened.
本発明のロボットでは、前記第4部材は、前記第3部材に回動可能に設けられた基端側アームと、前記基端側アームに回動可能に設けられた先端側アームとを有し、
前記第2状態において、前記第1部材の回動軸と前記基端側アームに対する前記先端側アームの回動軸とが直交することが可能であり、
前記第1部材の回動軸と前記先端側アームの回動軸とが直交した状態において、前記ロボットアームの先端および前記エンドエフェクターのうちの少なくとも一方と前記第2部材との間の距離をYとしたとき、
3[mm]≦Yの関係を満足することが好ましい。
In the robot according to the aspect of the invention, the fourth member includes a proximal arm rotatably provided on the third member, and a distal arm rotatably provided on the proximal arm. ,
In the second state, a rotation axis of the first member and a rotation axis of the distal arm with respect to the proximal arm can be orthogonal to each other;
In a state where the rotation axis of the first member is orthogonal to the rotation axis of the distal arm, the distance between at least one of the distal end of the robot arm and the end effector and the second member is Y. And when
It is preferable to satisfy the relationship of 3 [mm] ≦ Y.
これにより、第1部材の回動軸と先端側アームの回動軸とが直交することが可能であるため、先端領域におけるロボットアームの先端およびエンドエフェクターが動作できる範囲をより広くすることができる。また、距離Yが上記関係を満足することで、ロボットアームの先端およびエンドエフェクターのうちの少なくとも一方が、第1部材および第2部材に干渉せずに動作できる範囲を広く確保することができる。 Accordingly, the rotation axis of the first member and the rotation axis of the distal end arm can be orthogonal to each other, so that the range in which the distal end of the robot arm and the end effector can operate in the distal end region can be further increased. . Further, when the distance Y satisfies the above relationship, it is possible to secure a wide range in which at least one of the end of the robot arm and the end effector can operate without interfering with the first member and the second member.
本発明のロボットでは、5[mm]≦Yの関係を満足することが好ましい。
このような関係を満足することで、エンドエフェクターやエンドエフェクターに把持されるワークが比較的大きな構成であっても、前記ロボットアームの先端および前記エンドエフェクターのうちの少なくとも一方が、第1部材および第2部材に干渉せずに動作できる範囲を広く確保することができる。
In the robot of the present invention, it is preferable that the relationship of 5 [mm] ≦ Y is satisfied.
By satisfying such a relationship, even if the end effector or the work held by the end effector has a relatively large configuration, at least one of the end of the robot arm and the end effector includes the first member and the end effector. A wide range in which operation can be performed without interference with the second member can be secured.
本発明のロボットでは、前記第1部材の回動軸の軸方向における前記第3部材の長さをR3としたとき、
Y≦(R3/2)の関係を満足することが好ましい。
In the robot according to the aspect of the invention, when the length of the third member in the axial direction of the rotation axis of the first member is R3,
It is preferable to satisfy the relationship of Y ≦ (R3 / 2).
これにより、ロボットアームの大型化を防ぎつつ、先端領域におけるロボットアームの先端およびエンドエフェクターのうちの少なくとも一方の動作範囲を広くすることができる。 Thus, it is possible to increase the operating range of at least one of the end of the robot arm and the end effector in the end region while preventing the robot arm from being enlarged.
本発明のロボットでは、前記第1部材の回動軸の軸方向における前記第1部材の長さは、前記第1部材の回動軸の軸方向における前記第2部材の長さよりも長いことが好ましい。 In the robot according to the aspect of the invention, the length of the first member in the axial direction of the rotation axis of the first member may be longer than the length of the second member in the axial direction of the rotation axis of the first member. preferable.
これにより、ロボット自身(例えば第1部材や第1部材を支持する基台)や周辺機器との干渉を回避しつつ、第1状態をとることができる。 Thus, the first state can be achieved while avoiding interference with the robot itself (for example, the first member or a base supporting the first member) or peripheral devices.
本発明のロボットでは、前記第1部材の回動軸の軸方向における前記第3部材の長さは、前記第1部材の回動軸の軸方向における前記第2部材の長さよりも長いことが好ましい。 In the robot according to the aspect of the invention, the length of the third member in the axial direction of the rotation axis of the first member may be longer than the length of the second member in the axial direction of the rotation axis of the first member. preferable.
これにより、第1状態において、ロボットアームの先端を第2部材よりも先端領域側に突出させることができる。そのため、ロボットアームの先端およびエンドエフェクターのうちの少なくとも一方が、第1部材および第2部材に干渉せずに動作できる範囲を広く確保することができる。 Thus, in the first state, the distal end of the robot arm can be made to protrude more toward the distal end region than the second member. Therefore, a wide range in which at least one of the end of the robot arm and the end effector can operate without interfering with the first member and the second member can be secured.
本発明のロボットでは、前記第3部材の長さは、前記第2部材の長さの2倍以上であることが好ましい。 In the robot according to the aspect of the invention, it is preferable that the length of the third member be equal to or more than twice the length of the second member.
これにより、第1状態において、ロボットアームの先端を第2部材よりも先端領域側に十分に突出させることができる。そのため、エンドエフェクターやワークが比較的大きな構成であっても、ロボットアームの先端およびエンドエフェクターのうちの少なくとも一方が、第1部材および第2部材に干渉せずに動作できる範囲を広く確保することができる。 Thus, in the first state, the distal end of the robot arm can be made to project sufficiently toward the distal end region from the second member. Therefore, even if the end effector and the work are relatively large, it is necessary to secure a wide range in which at least one of the end of the robot arm and the end effector can operate without interfering with the first member and the second member. Can be.
本発明のロボットでは、前記第1部材は、前記第1部材の回動軸とは異なる方向に延びる第1部分と、前記第1部材の回動軸に沿った方向に延びる第2部分と、前記第1部分および前記第2部分とは異なる方向に延びる第3部分と、を有することが好ましい。 In the robot according to the aspect of the invention, the first member may include a first portion extending in a direction different from a rotation axis of the first member, a second portion extending in a direction along the rotation axis of the first member, And a third portion extending in a direction different from the first portion and the second portion.
このような第3部分を有することで、第3部分の周辺に各種機器を配置しても、その各種機器に第1部材が干渉することを回避することができる。 By having such a third portion, even if various devices are arranged around the third portion, it is possible to prevent the first member from interfering with the various devices.
本発明のロボットでは、前記第1部材は、第1回動軸周りに回動可能な第1アームであり、
前記第2部材は、前記第1回動軸とは軸方向が異なる第2回動軸周りに回動可能な第2アームであり、
前記第3部材は、前記第2回動軸の軸方向と平行な第3回動軸周りに回動可能な第3アームと、前記第3アームに、前記第3回動軸の軸方向とは異なる第4回動軸周りに回動可能に設けられた第4アームと、を有し、
前記第4部材は、前記第4回動軸とは軸方向が異なる第5回動軸周りに回動可能な第5アームと、前記第5回動軸とは軸方向が異なる第6回動軸周りに回動可能な第6アームと、を有することが好ましい。
In the robot according to the aspect of the invention, the first member may be a first arm rotatable around a first rotation axis,
The second member is a second arm rotatable around a second rotation axis having an axial direction different from the first rotation axis,
The third member includes a third arm rotatable around a third rotation axis parallel to the axial direction of the second rotation axis, and the third arm includes: a third arm; And a fourth arm rotatably provided around a different fourth rotation axis.
A fifth arm rotatable around a fifth rotation axis having an axial direction different from the fourth rotation axis; and a sixth rotation having an axial direction different from the fifth rotation axis. A sixth arm rotatable about an axis.
これにより、ロボットアームの先端の駆動範囲が広く、高い作業性を発揮することができる。 Thus, the driving range of the tip of the robot arm is wide, and high workability can be exhibited.
本発明のロボットでは、前記ロボットアームは、板部材を取り付けることが可能な取付部を有することが好ましい。 In the robot according to the aspect of the invention, it is preferable that the robot arm has an attachment portion to which a plate member can be attached.
これにより、板部材をロボットアームに簡単に取り付けることができる。また、板部材が、例えば、各回動軸の原点(各エンコーダーの原点)の設定に用いる基準板である場合には、前記設定を高精度に行うことができる。 Thereby, the plate member can be easily attached to the robot arm. When the plate member is, for example, a reference plate used for setting the origin of each rotation axis (the origin of each encoder), the setting can be performed with high accuracy.
以下、本発明のロボットを添付図面に示す好適な実施形態に基づいて詳細に説明する。
<ロボット>
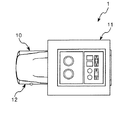
図1は、本発明の第1実施形態に係るロボットを示す斜視図である。図2は、図1に示すロボットの正面図である。図3は、図1に示すロボットの背面図である。図4は、図1に示すロボットの右側面図である。図5は、図1に示すロボットの左側面図である。図6は、図1に示すロボットの平面図である。図7は、図1に示すロボットの底面図である。図8は、図1に示すロボットの変化の途中の状態または変化をした状態の正面側からの斜視図である。図9は、図1に示すロボットの概略構成図である。図10は、図1に示すロボットの模式図である。
Hereinafter, a robot of the present invention will be described in detail based on preferred embodiments shown in the accompanying drawings.
<Robot>
FIG. 1 is a perspective view showing a robot according to the first embodiment of the present invention. FIG. 2 is a front view of the robot shown in FIG. FIG. 3 is a rear view of the robot shown in FIG. FIG. 4 is a right side view of the robot shown in FIG. FIG. 5 is a left side view of the robot shown in FIG. FIG. 6 is a plan view of the robot shown in FIG. FIG. 7 is a bottom view of the robot shown in FIG. FIG. 8 is a perspective view from the front of the robot shown in FIG. FIG. 9 is a schematic configuration diagram of the robot shown in FIG. FIG. 10 is a schematic diagram of the robot shown in FIG.
なお、以下では、説明の都合上、図1〜5、8、9中の上側を「上」または「上方」、下側を「下」または「下方」と言う。また、図1〜5、8、9中の基台側を「基端」または「上流」、その反対側(ハンド側)を「先端」または「下流」と言う。また、図1〜5、8、9中の上下方向を「鉛直方向」とし、左右方向を「水平方向」とする。なお、本明細書において、2つの軸が互いに「平行」とは、当該2つの軸のうちの一方の軸が他方の軸に対して5°以下の範囲内で傾斜している場合も含む。 In the following, for convenience of description, the upper side in FIGS. 1 to 5, 8 and 9 is referred to as “upper” or “upper”, and the lower side is referred to as “lower” or “lower”. 1 to 5, 8, and 9, the base side is referred to as "base end" or "upstream", and the opposite side (hand side) is referred to as "tip end" or "downstream". In addition, the vertical direction in FIGS. 1 to 5, 8 and 9 is referred to as “vertical direction”, and the horizontal direction is referred to as “horizontal direction”. In this specification, the expression “two axes are“ parallel ”to each other” includes a case where one of the two axes is inclined within 5 ° or less with respect to the other axis.
図1〜図8に示すロボット1は、例えば、腕時計のような精密機器等を製造する製造工程等で用いることができる。また、ロボット1は、精密機器やこれを構成する部品(対象物)の給材、除材、搬送および組立等の作業を行うことができる。
The
このロボット1は、基台11と、ロボットアーム10と、を有している。ロボットアーム10は、第1部材で構成されている第1アーム12と、第2部材で構成されている第2アーム13と、第3部材で構成されている第3アーム14および第4アーム15と、第4部材で構成されている第5アーム16および第6アーム17と、を備えている。すなわち、ロボット1は、基台11と、第1アーム12と、第2アーム13と、第3アーム14と、第4アーム15と、第5アーム16(基端側アーム)と、第6アーム17(先端側アーム)とが基端側から先端側に向かってこの順に連結された垂直多関節(6軸)ロボットである。第6アーム17の先端には、図9に示すように、例えば、精密機器、部品等を把持するハンド91等のエンドエフェクターを着脱可能に取り付けることができるようになっている。また、ロボット1は、第1駆動源401、第2駆動源402、第3駆動源403、第4駆動源404、第5駆動源405および第6駆動源406(6つの駆動源)と、を備えている。
The
また、ロボット1は、ロボット1の各部の作動を制御する図示しないロボット制御装置(制御部)を備えている。このロボット制御装置は、例えば、CPU(Central Processing Unit)が内蔵されたパーソナルコンピューター(PC)等で構成することができる。なお、ロボット制御装置は、ロボット1に内蔵されていてもよいし、また、ロボット1とは別体であってもよい。
Further, the
なお、以下では、第1アーム12、第2アーム13、第3アーム14、第4アーム15、第5アーム16および第6アーム17をそれぞれ「アーム」とも言う。また、第1駆動源401、第2駆動源402、第3駆動源403、第4駆動源404、第5駆動源405および第6駆動源406をそれぞれ「駆動源(駆動部)」とも言う。
Hereinafter, the
(基台)
図9に示すように、基台11は、ロボット1が天吊り型の垂直多関節ロボットの場合、ロボット1の最も上方に位置し、ロボット1の設置スペースの天井101の下面である取付面102に固定される部分(取り付けられる部材)である。
(Base)
As shown in FIG. 9, when the
なお、本実施形態では、基台11の下部に設けられた板状のフランジ111が、取付面102に固定されているが、取付面102に固定される部分は、これに限定されず、例えば、基台11の上面であってもよい。また、この固定方法としては、特に限定されず、例えば、複数本のボルトによる固定方法等を採用することができる。
In the present embodiment, the plate-
また、基台11の固定箇所としては、設置スペースの天井に限定されず、この他、例えば、設置スペースの壁、床、地上等であってもよい。
Further, the fixing portion of the
(ロボットアーム)
図9に示すロボットアーム10は、基台11に対して回動可能に支持されており、アーム12〜17は、それぞれ、基台11に対し独立して変位可能に支持されている。
(Robot arm)
The
第1アーム12は、湾曲または屈曲した形状をなしている。第1アーム12は、基台11に設けられ、水平方向(第1方向)に延びる第1部分121と、第2アーム13に設けられ、垂直方向(第1方向とは異なる第2方向)に延びる第2部分122と、第1部分121と第2部分122との間に位置し、水平方向および垂直方向に対して傾斜した方向(第1方向および第2方向とは異なる方向)に延びる第3部分123と、を有している。より具体的には、第1アーム12は、基台11に接続され、基台11から鉛直方向下方に延出してから水平方向に延出した第1部分121と、第1部分121の基台11との接続部とは反対側の端部から第1部分121と遠ざかる方向へ傾斜しながら鉛直方向下方に延出した第3部分123と、第3部分123の先端から鉛直方向下方に延出した第2部分122と、を有している。なお、これら第1部分121、第2部分122および第3部分123は、一体で形成されている。また、第1部分121と第2部分122とは、図9の紙面手前から見て(後述する第1回動軸O1および第2回動軸O2の双方と直交する正面視で)、ほぼ直交(交差)している。
The
また、第1部分121は、第1接続部1211(接続部)を介して基台11に接続されている。また、第2部分122は、第2接続部1221(接続部)を介して第2アーム13に接続されている。
Further, the
第2アーム13は、長手形状をなし、第1アーム12の先端部(第2部分122の第3部分123とは反対の端部)に接続されている。
The
第3アーム14は、長手形状をなし、第2アーム13の第1アーム12が接続されている端部とは反対の端部に接続されている。第3アーム14は、第2アーム13に接続され、第2アーム13から水平方向に延出した第1部分141と、第1部分141から鉛直方向に延出した第2部分142と、を有している。なお、これら第1部分141および第2部分142は、一体で形成されている。また、第1部分141と第2部分142とは、図9の紙面手前から見て(後述する第3回動軸O3および第4回動軸O4の双方と直交する正面視で)、ほぼ直交(交差)している。
The
第4アーム15は、第3アーム14の第2アーム13が接続されている端部とは反対の端部に接続されている。第4アーム15は、互いに対向する1対の支持部151、152を有している。支持部151、152は、第5アーム16との接続に用いられる。
The
第5アーム16は、支持部151、152の間に位置し、支持部151、152に接続されることで第4アーム15と連結している。なお、第4アーム15は、この構造に限らず、例えば、支持部が1つ(片持ち)であってもよい。
The
第6アーム17は、平板状をなし、第5アーム16の先端部に接続されている。また、第6アーム17の先端部(第5アーム16と反対側の端部)には、ハンド91が着脱可能に装着される。ハンド91としては、特に限定されず、例えば、複数本の指部(フィンガー)を有する構成のものが挙げられる。
The
なお、前述した各アーム12〜17の外装(外形を構成する部材)は、それぞれ、1つの部材で構成されていてもよいし、複数の部材で構成されていてもよい。
In addition, the exteriors (members that form the outer shape) of the
次に、図10を参照しつつ、アーム12〜17の駆動とともに駆動源401〜406について説明する。
Next, the driving of the
図10に示すように、基台11と第1アーム12とは、関節(接続部分)171を介して連結されている。なお、関節171は、基台11に含まれていてもよく、また、含まれていなくてもよい。
As shown in FIG. 10, the
関節171は、基台11に連結された第1アーム12を基台11に対し回動可能に支持する機構を有している。これにより、第1アーム12は、基台11に対し、鉛直方向と平行な第1回動軸O1(第n回動軸)を中心に(第1回動軸O1周りに)回動可能となっている。また、第1回動軸O1は、ロボット1の最も上流側にある回動軸である。この第1回動軸O1周りの回動は、モーター401Mを有する第1駆動源401の駆動によりなされる。また、モーター401Mは、ケーブル(図示せず)を介してモータードライバー301に電気的に接続されていて、モータードライバー301を介して制御部(図示せず)により制御される。なお、第1駆動源401はモーター401Mとともに設けた減速機(図示せず)によってモーター401Mからの駆動力を伝達するように構成してもよく、また、減速機が省略されていてもよい。
The joint 171 has a mechanism for rotatably supporting the
また、第1アーム12と第2アーム13とは、関節(接続部分)172を介して連結されている。関節172は、互いに連結された第1アーム12と第2アーム13のうちの一方を他方に対し回動可能に支持する機構を有している。これにより、第2アーム13は、第1アーム12に対し、水平方向と平行な第2回動軸O2(第(n+1)回動軸)を中心に(第2回動軸O2周りに)回動可能となっている。第2回動軸O2は、第1回動軸O1と直交している。この第2回動軸O2周りの回動は、モーター402Mを有する第2駆動源402の駆動によりなされる。また、モーター402Mは、ケーブル(図示せず)を介してモータードライバー302に電気的に接続されていて、モータードライバー302を介して制御部(図示せず)により制御される。なお、第2駆動源402はモーター402Mとともに設けた減速機(図示せず)によってモーター402Mからの駆動力を伝達するように構成してもよく、また、減速機が省略されていてもよい。また、第2回動軸O2は、第1回動軸O1に直交する軸と平行であってもよく、また、第2回動軸O2は、第1回動軸O1と直交していなくても、軸方向が互いに異なっていればよい。
The
また、第2アーム13と第3アーム14とは、関節(接続部分)173を介して連結されている。関節173は、互いに連結された第2アーム13と第3アーム14のうちの一方を他方に対し回動可能に支持する機構を有している。これにより、第3アーム14は、第2アーム13に対して、水平方向と平行な第3回動軸O3を中心に(第3回動軸O3周りに)回動可能となっている。第3回動軸O3は、第2回動軸O2と平行である。この第3回動軸O3周りの回動は、モーター403Mを有する第3駆動源403の駆動によりなされる。また、モーター403Mは、ケーブル(図示せず)を介してモータードライバー303を介して電気的に接続されていて、モータードライバー303を介して制御部(図示せず)により制御される。なお、第3駆動源403はモーター403Mとともに設けた減速機(図示せず)によってモーター403Mからの駆動力を伝達するように構成してもよく、また、減速機が省略されていてもよい。
The
また、第3アーム14と第4アーム15とは、関節(接続部分)174を介して連結されている。関節174は、互いに連結された第3アーム14と第4アーム15のうちの一方を他方に対し回動可能に支持する機構を有している。これにより、第4アーム15は、第3アーム14に対し、第3アーム14の中心軸方向と平行な第4回動軸O4を中心に(第4回動軸O4周りに)回動可能となっている。第4回動軸O4は、第3回動軸O3と直交している。この第4回動軸O4周りの回動は、モーター404Mを有する第4駆動源404の駆動によりなされる。また、モーター404Mは、ケーブル(図示せず)を介してモータードライバー304に電気的に接続されていて、モータードライバー304を介して制御部(図示せず)により制御される。なお、第4駆動源404はモーター404Mとともに設けた減速機(図示せず)によってモーター404Mからの駆動力を伝達するように構成してもよく、また、減速機が省略されていてもよい。また、第4回動軸O4は、第3回動軸O3に直交する軸と平行であってもよい、また、第4回動軸O4は、第3回動軸O3と直交していなくても、軸方向が互いに異なっていればよい。
The
また、第4アーム15と第5アーム16とは、関節(接続部分)175を介して連結されている。関節175は、互いに連結された第4アーム15と第5アーム16の一方を他方に対し回動可能に支持する機構を有している。これにより、第5アーム16は、第4アーム15に対し、第4アーム15の中心軸方向と直交する第5回動軸O5を中心に(第5回動軸O5周りに)回動可能となっている。第5回動軸O5は、第4回動軸O4と直交している。この第5回動軸O5周りの回動は、モーター405Mを有する第5駆動源405の駆動によりなされる。また、モーター405Mは、ケーブル(図示せず)を介してモータードライバー305に電気的に接続されていて、モータードライバー305を介して制御部(図示せず)により制御される。なお、第5駆動源405はモーター405Mとともに設けた減速機(図示せず)によってモーター405Mからの駆動力を伝達するように構成してもよく、また、減速機が省略されていてもよい。また、第5回動軸O5は、第4回動軸O4に直交する軸と平行であってもよく、また、第5回動軸O5は、第4回動軸O4と直交していなくても、軸方向が互いに異なっていればよい。
The
また、第5アーム16と第6アーム17とは、関節(接続部分)176を介して連結されている。関節176は、互いに連結された第5アーム16と第6アーム17の一方を他方に対し回動可能に支持する機構を有している。これにより、第6アーム17は、第5アーム16に対し、第6回動軸O6を中心に(第6回動軸O6周りに)回動可能となっている。第6回動軸O6は、第5回動軸O5と直交している。この第6回動軸O6周りの回動は、モーター406Mを有する第6駆動源406の駆動によりなされる。また、モーター406Mは、ケーブル(図示せず)を介してモータードライバー306に電気的に接続されていて、モータードライバー306を介して制御部(図示せず)により制御される。なお、第6駆動源406はモーター406Mとともに設けた減速機(図示せず)によってモーター406Mからの駆動力を伝達するように構成してもよく、また、減速機が省略されていてもよい。また、第6回動軸O6は、第4回動軸O4に直交する軸と平行であってもよく、また、第6回動軸O6は、第5回動軸O5に直交する軸と平行であってもよく、また、第6回動軸O6は、第5回動軸O5と直交していなくても、軸方向が互いに異なっていればよい。
The
そして、このような駆動をするロボット1は、第6アーム17の先端部に接続されたハンド91で精密機器、部品等を把持したまま、各アーム12〜17等の動作を制御することにより、当該精密機器や部品の搬送等の各作業を行うことができる。なお、ハンド91の駆動は、制御部(図示せず)により制御される。
The
以上、ロボット1の基本的な構成について簡単に説明した。このような構成のロボット1は、前述したように、6つ(複数)のアーム12〜17を有する垂直多関節ロボットであるため、駆動範囲が広く、高い作業性を発揮することができる。
The basic configuration of the
また、このロボット1は、前述したように、第1アーム12の基端側が基台11に取り付けられており、これにより、各アーム12〜17を基台11に対して回動させることができる。そして、本実施形態では、ロボット1は、基台11が天井101に取り付けられている天吊り型であり、基台11と第1アーム12との接続部分である関節171が、第1アーム12と第2アーム13との接続部分である関節172より鉛直方向上方に位置している。このため、ロボット1よりも鉛直下方側におけるロボット1の作業範囲をより広くすることができる。
Further, in the
次に、図11、図12、図13、図14および図15を参照しつつ、各アーム12〜17の関係について説明する。
Next, the relationship between the
図11は、図1に示すロボットの第1アーム、第2アームおよび第3アームが重なっていない状態の概略側面図である。図12は、図1に示すロボットの第1アーム、第2アームおよび第3アームが重なっている状態の概略側面図である。図13は、図1に示すロボットの動作を説明するための図である。図14は、図13に示すロボットの動作におけるハンドの移動経路を示す図である。図15は、図1に示すロボットが有するアームの長さや配置を説明するための図である。 FIG. 11 is a schematic side view of the robot shown in FIG. 1 in a state where the first arm, the second arm, and the third arm are not overlapped. FIG. 12 is a schematic side view of a state where the first arm, the second arm, and the third arm of the robot shown in FIG. 1 are overlapped. FIG. 13 is a diagram for explaining the operation of the robot shown in FIG. FIG. 14 is a diagram showing a movement path of the hand in the operation of the robot shown in FIG. FIG. 15 is a diagram for explaining the length and arrangement of the arms of the robot shown in FIG.
なお、以下の説明では、第3アーム14、第4アーム15、第5アーム16および第6アーム17については、これらを真っ直ぐに伸ばした状態、換言すれば、図11および図12に示すように、第4回動軸O4と第6回動軸O6とが一致しているか、または平行である状態で考えることとする。
In the following description, the
まず、図11に示すように、第1アーム12の長さL1は、第2アーム13の長さL2よりも長く設定されている。
First, as shown in FIG. 11, the length L1 of the
ここで、第1アーム12の長さL1とは、第2回動軸O2の軸方向から見て、第2回動軸O2と、取り付け面102との間の距離である。また、第2アーム13の長さL2とは、第2回動軸O2の軸方向から見て、第2回動軸O2と第3回動軸O3との間の距離である。
Here, the length L1 of the
なお、第1アーム12の長さL1を、第2回動軸O2の軸方向から見て、第2回動軸O2と、第1アーム12を回動可能に支持する軸受部61(関節171が有する部材)の図11中の左右方向に延びる中心線611との間の距離と捉えてもよい。また、第1アーム12の長さL1を、第2回動軸O2の軸方向から見て、第1アーム12の先端面(軸受部61とは反対側の端面)と取り付け面102との間の距離と捉え、また、第2アーム13の長さL2を、第2回動軸O2の軸方向から見て、第2アーム13の先端面と第2アーム13の基端面との間の距離と捉えてもよい。
When the length L1 of the
また、図11および図12に示すように、ロボット1は、第2回動軸O2の軸方向から見て、第1アーム12と第2アーム13とのなす角度θを0°にすることが可能なように構成されている。すなわち、ロボット1は、第2回動軸O2の軸方向から見て、第1アーム12と第2アーム13とが重なることが可能なように構成されている。
As shown in FIGS. 11 and 12, the
そして、第2回動軸O2の軸方向から見て、第1アーム12と第2アーム13とが重なっている状態(以下、「状態A」という)において、第1アーム12と第2アーム13との間には、所定の間隔が設けられている。すなわち、ロボット1は、状態Aにおいて、第2アーム13が、第1アーム12に干渉しないように構成されている。
Then, in a state where the
特に、前述したように、第1アーム12の長さL1が、第2アーム13の長さL2よりも長く設定されているため、状態Aにおいて、第2アーム13と第1部分121との間に所定の空間を設けることができる。そのため、第2アーム13が、第1部分121に干渉するのを回避しつつ、状態Aとなることができる。
In particular, as described above, since the length L1 of the
ここで、前記第1アーム12と第2アーム13とのなす角度θとは、第2回動軸O2の軸方向から見て、第2回動軸O2と第3回動軸O3とを通る直線621(第2回動軸O2の軸方向から見た場合の第2アーム13の中心軸)と、第1回動軸O1とのなす角度である(図11参照)。
Here, the angle θ between the
また、図12に示すように、ロボット1は、第2回動軸O2の軸方向から見て、第2アーム13と、第3アーム14とが重なることが可能なように構成されている。
As shown in FIG. 12, the
そして、第2回動軸O2の軸方向から見て、第2アーム13と第3アーム14とが重なっている状態(以下、「状態B」という)において、第2アーム13と第3アーム14との間には、所定の間隔が設けられている。すなわち、ロボット1は、状態Bにおいて、第2アーム13と第3アーム14とが干渉しないように構成されている。
When the
上記のようなことから、ロボット1は、図12に示すように、第2回動軸O2の軸方向から見て、第1アーム12と、第2アーム13と、第3アーム14とが同時に重なることが可能なように構成されている。このように第2回動軸O2の軸方向から見て、第1アーム12と第2アーム13と第3アーム14とが重なっている状態(以下、「状態C(第1状態)」という)では、第1回動軸O1から見て、第1アーム12の第1部分121と、第2アーム13および第3アーム14とが重なっている。そして、第1アーム12の第1部分121と第3アーム14との間にも、所定の間隔が設けられている。すなわち、ロボット1は、状態Cにおいて、第1アーム12と第3アーム14とが干渉しないように構成されている。
From the above, as shown in FIG. 12, the
また、図11に示すように、第3アーム14、第4アーム15および第5アーム16の合計の長さL3は、第2アーム13の長さL2よりも長く設定されている。また、第3アーム14および第4アーム15の合計長さR3も、第2アーム13の長さL2よりも長く設定されている。このため、図12に示すように、状態Cにおいて、第2アーム13からロボットアーム10の先端を第2アーム13の基端部よりも下方に突出させることができる。これにより、図9に示すように、状態Cの際に形成される第2アーム13の基台11とは反対側の領域(以下、「先端領域107」ともいう)において、ロボットアーム10の先端およびハンド91が、第1アーム12および第2アーム13と干渉せずに動作できる範囲を広く確保することができる。
As shown in FIG. 11, the total length L3 of the
ここで、第3アーム14、第4アーム15および第5アーム16の合計の長さL3とは、第2回動軸O2の軸方向から見て、第3回動軸O3と第5回動軸O5との間の距離である(図12参照)。なお、長さL3を、第2回動軸O2の軸方向から見て、第3アーム14の基端面と第5アーム16の先端面との間の距離と捉えてもよい。この場合、第3アーム14、第4アーム15および第5アーム16は、図12に示すように第4回動軸O4と第6回動軸O6とが一致しているか、または平行である状態である。
Here, the total length L3 of the
このようなロボットアーム10を有するロボット1では、前述したように、第2回動軸O2の軸方向から見て第1アーム12と第2アーム13と第3アーム14とが重なることが可能である。このため、図13に示すように、第1アーム12を回動させずに、第2アーム13、第3アーム14を回動させることにより、第2回動軸O2の軸方向から見て第1アーム12と第2アーム13と第3アーム14とが重なった状態を経て、ロボットアーム10の先端およびハンド91を第1回動軸O1周りに180°異なる位置に移動させることができる。
In the
このようなロボットアーム10の駆動により、ロボット1は、図14に示すように、ハンド91を矢印62、63で示すように移動させる動作を行わずに、ハンド91を矢印64で示すように移動させる動作を行うことができる。すなわち、ロボット1は、第1回動軸O1の軸方向から見て、ハンド91(ロボットアーム10の先端)を直線上に移動させる動作を行うことができる。これより、ロボット1が干渉しないようにするための空間を小さくすることができる。このため、ロボット1を設置するための設置スペースの面積S(設置面積)を、従来よりも小さくすることができる。
By such driving of the
具体的には、図14に示すように、ロボット1の設置スペースの幅Wを、従来の設置スペースの幅WXより小さく、例えば、幅WXの80%以下にすることができる。このため、ロボット1の幅方向(生産ラインの方向)の稼働領域を小さくすることができる。これにより、ロボット1を生産ラインに沿って単位長さ当たりに多く配置することができ、生産ラインを短縮することができる。
Specifically, as shown in FIG. 14, the width W of the installation space of the
また、同様に、ロボット1の設置スペースの高さ(鉛直方向の長さ)を従来の高さより低く、具体的には、例えば従来の高さの80%以下にすることができる。
Similarly, the height (vertical length) of the installation space for the
また、ハンド91を矢印64で示すように移動させる動作を行うことが可能であるため、ハンド91を第1回動軸O1周りに180°異なる位置に移動させる際、例えば、第1アーム12を回動させないか、または、第1アーム12の回動角(回動量)を小さくすることができる。第1アーム12の第1回動軸O1周りの回動角を小さくすることで、第1回動軸O1の軸方向から見て、基台11よりも外側に張り出している部分(第2部分122および第3部分123)を有する第1アーム12の回動を小さくすることができるため、ロボット1の周辺機器との干渉を少なくすることができる。
Further, since it is possible to perform an operation of moving the
また、ハンド91を矢印64で示すように移動させる動作を行うことが可能であるため、ロボット1の動きを少なくすることができ、よって、ロボット1を効率良く駆動することができる。そのため、タクトタイムを短縮することができ、作業効率を向上させることができる。また、ロボットアーム10の先端を直線上に移動させることができるため、ロボット1の動きを把握し易い。
Further, since the operation of moving the
ここで、上述したようなロボット1のハンド91(ロボットアーム10の先端)を第1回動軸O1周りに180°異なる位置に移動させる動作を、従来のロボットのように単純に第1アーム12を第1回動軸O1周りに回動させて実行しようとすると、ロボット1が周辺装置に干渉する虞があるので、その干渉を回避するための退避点をロボット1に教示する必要がある。例えば、第1アーム12のみを第1回動軸O1周りに90°回転させるとロボット1が周辺装置にも干渉する場合には、周辺装置に干渉しないよう、多数の退避点をロボット1に教示する必要がある。このように従来のロボットでは、多数の退避点を教示することが必要であり、膨大な数の退避点が必要になり、教示に多くの手間および長い時間を要する。
Here, the operation of moving the hand 91 (the end of the robot arm 10) of the
これに対し、ロボット1では、ハンド91を第1回動軸O1周りに180°異なる位置に移動させる動作を実行する場合、干渉する虞がある領域や部分が非常に少なくなるため、教示する退避点の数を低減することができ、教示に要する手間および時間を低減することができる。すなわち、ロボット1では、教示する退避点の数は、例えば、従来のロボットの1/3程度になり、飛躍的に教示が容易になる。
On the other hand, in the
また、ロボット1では、第3アーム14および第4アーム15の図9中の右側の二点鎖線で囲まれた領域(部分)105は、ロボット1がロボット1自身および他の部材と干渉しないか、または干渉し難い領域(部分)である。このため、前記領域105に、所定の部材を搭載した場合、その部材は、ロボット1および周辺装置等に干渉し難い。このため、ロボット1では、領域105に、所定の部材を搭載することが可能である。特に、領域105のうち、第3アーム14の図9中の右側の領域に前記所定の部材を搭載する場合は、その部材が周辺装置(図示せず)と干渉する確率はさらに低くなるので、より効果的である。
In the
また、ロボット1では、天井101と第1アーム12との間において、図9中の左側の二点鎖線で囲まれた領域(部分)106も、前述した領域105と同様、ロボット1がロボット1自身および他の部材と干渉しないか、または干渉し難い領域(部分)である。この領域106は、第1アーム12が、第3部分123を有する構成であることによる。
Further, in the
前記領域105に搭載可能なものとしては、例えば、ハンド、ハンドアイカメラ等のセンサーの駆動を制御する制御装置、吸着機構の電磁弁等が挙げられる。
As a device that can be mounted on the
具体例としては、例えば、ハンドに吸着機構を設ける場合、領域105に電磁弁等を設置すると、ロボット1が駆動する際に前記電磁弁が邪魔にならない。このように、領域105は、利便性が高い。
As a specific example, for example, when a suction mechanism is provided in the hand, if an electromagnetic valve or the like is installed in the
また、図15に示すように、ロボット1では、ハンド91を第2アーム13の下方に位置させることができる。具体的には、図15に示すように、状態Cにおいて、第1回動軸O1の軸方向から見たとき、ハンド91が第2アーム13と重なる状態(以下、「状態D(第2状態)」という)となることが可能である。
Further, as shown in FIG. 15, in the
このようなロボット1によれば、ロボットアーム10の先端およびハンド91が動作できる範囲を広くとることができる。
According to such a
また、図15に示すように、ロボット1は、状態Dにおいて、第6回動軸O6と第1回動軸O1とが、直交することが可能である。このため、先端領域107におけるロボットアーム10の先端およびハンド91が動作できる範囲をより広くすることができる。
As shown in FIG. 15, in the
また、第1回動軸O1と第5回動軸O5とが直交したときの、ハンド91と第2アーム13との間の距離(最短距離)をYとしたとき、下記式(1)を満足していることが好ましく、下記式(2)を満足していることがより好ましい。
When the distance (shortest distance) between the
3[mm]≦Y・・・(1)
5[mm]≦Y・・・(2)
3 [mm] ≦ Y (1)
5 [mm] ≦ Y (2)
上記式(1)を満足することで、ロボットアーム10の先端およびハンド91が、先端領域107において、第1アーム12および第2アーム13に干渉せずに動作できる範囲を広く確保することができる。また、上記式(2)を満足することで、ハンド91やハンド91によって把持されるワーク(図示せず)が比較的大きな構成であっても、ロボットアーム10の先端およびハンド91が、第1アーム12および第2アーム13に干渉せずに動作できる範囲を広く確保することができる。
By satisfying the above expression (1), it is possible to secure a wide range in which the distal end of the
また、例えば、ハンド91に接続された配線および配管等(図示せず)が第5アーム16および第6アーム17の外部に設けられている場合であっても、距離Yが上記関係を満足することで、前記配線および配管等が第1アーム12および第2アーム13に干渉することを回避し、先端領域107におけるハンド91の動作範囲が著しく規制されることを低減することができる。
Further, for example, even when wires and pipes (not shown) connected to the
さらに、状態Dにおいて、距離Yは、下記式(3)を満足していることがより好ましい。 Further, in the state D, the distance Y more preferably satisfies the following expression (3).
Y≦(R3/2)・・・(3)
これにより、第3アーム14および第4アーム15の合計長さR3が長くなり過ぎることによるロボットアーム10の大型化を防ぎつつ、先端領域107におけるロボットアーム10の先端の動作範囲を広くすることができる。
Y ≦ (R3 / 2) (3)
Accordingly, it is possible to prevent the
また、前述したように、ロボット1では、長さL3が第2アーム13の長さL2よりも長く設定されているが、特に、長さL3は、長さL2の2倍以上であることが好ましい。これにより、状態Cにおいて、ロボットアーム10の先端を第2アーム13よりも先端領域107側に十分に突出させることができる。そのため、ハンド91やワークが比較的大きな構成であっても、ロボットアーム10の先端およびハンド91が、第1アーム12および第2アーム13に干渉せずに動作できる範囲を広く確保することができる。
Further, as described above, in the
上記のような関係を満足するロボット1の各部の寸法の一例を以下の表1、表2に示す。表1は、例えばハンド91に接続された配線および配管等をロボットアーム10の内部に設けた場合の、ロボット1の各部の寸法の一例を示している。また、表2は、例えばハンド91に接続された配線および配管等をロボットアーム10外部に設けた場合の、ロボット1の各部の寸法の一例を示している。
Tables 1 and 2 below show an example of the dimensions of each part of the

表1および表2中の「アーム長L」は、長さL2と長さL3との合計を示している。また、表1および表2中の「幅RJ2」は、図15に示すように、第2接続部1221の幅を示しており、「RJ2/2」は、幅RJ2の半分の長さを示している。また、表1および表2中の「ハンド径H」は、図15に示すように、ハンド91の最大幅を示している。また、表1および表2中の「最大長さR1」は、第1回動軸O1の軸方向から見て、第1回動軸O1からの第1アーム12の最大長さを示している。また、表1および表2中の「距離P1」は、第1アーム12と第2アーム13の第2回動軸O2とは反対側の端(先端)との間の距離P1(最短距離)を示し、本実施形態では、距離P1とは、第3部分123と第2アーム13との間の最短距離である。
“Arm length L” in Tables 1 and 2 indicates the sum of the length L2 and the length L3. Further, “width RJ2” in Tables 1 and 2 indicates the width of the
<第2実施形態>
次に、本発明の第2実施形態について説明する。
<Second embodiment>
Next, a second embodiment of the present invention will be described.
図16は、本発明の第2実施形態に係るロボットを示す斜視図である。図17は、図16に示すロボットに板部材を取り付けた状態を示す斜視図である。図18、図19および図20は、それぞれ、図16に示すロボットのメカキャリブレーションを説明するための概略側面図である。 FIG. 16 is a perspective view showing a robot according to the second embodiment of the present invention. FIG. 17 is a perspective view showing a state where a plate member is attached to the robot shown in FIG. FIGS. 18, 19 and 20 are schematic side views for explaining the mechanical calibration of the robot shown in FIG.
本実施形態に係るロボットは、ロボットアームに設けられた取付部を備えることが異なること以外は、前述した第1実施形態と同様である。 The robot according to the present embodiment is the same as the first embodiment described above, except that the robot according to the present embodiment includes a mounting portion provided on a robot arm.
なお、以下の説明では、第2実施形態に関し、前述した実施形態との相違点を中心に説明し、同様の事項に関してはその説明を省略する。また、図16〜20では、前述した第1実施形態と同様の構成について、同一符号を付している。 In the following description, the second embodiment will be described focusing on differences from the above-described embodiment, and the description of the same items will be omitted. In FIGS. 16 to 20, the same reference numerals are given to the same components as those in the above-described first embodiment.
図16に示すロボット1Aが有するロボットアーム10Aには、ロボットアーム10Aに板部材40を取り付けるために用いられる取付機構3を有している。
The
この取付機構3は、図17に示す板部材40とともに、例えば、各回動軸(第1回動軸O1、第2回動軸O2、第3回動軸O3、第4回動軸O4、第5回動軸O5および第6回動軸O6)の原点(各エンコーダーの原点)の設定、いわゆるメカキャリブレーションの際に用いられる。
The mounting mechanism 3 includes, for example, each rotating shaft (first rotating shaft O1, second rotating shaft O2, third rotating shaft O3, fourth rotating shaft O4, and fourth rotating shaft O4) together with the
図16に示すように、取付機構3は、基台11のフランジ111に設けられた取付部30と、ロボットアーム10Aに設けられた取付部31、32、33、34と、ロボットアーム10Aに着脱可能に取り付けられた取付部35、36と、を有する。
As shown in FIG. 16, the mounting mechanism 3 includes a mounting
取付部30は、フランジ111の下面および上面に貫通した貫通孔である。なお、本実施形態では、取付部30は、貫通孔であるが、例えば、フランジ111の側面および下面に開放した凹部であってもよい。
The
取付部31は、第1アーム12の上面に形成された孔(凹部)であり、モーター401Mの近傍に設けられている。
これら、取付部30、31には、図17に示す棒状部材41が挿通可能になっている。
The
A rod-shaped
取付部32は、第1アーム12の第1部分121の側面(図16の矢印X方向から見た正面)に設けられていて、モーター401Mの近傍に位置している。本実施形態では、取付部32は、2つ形成されている。また、取付部33は、第1アーム12の第2部分122の側面(図16の矢印X方向から見た正面)に設けられていて、モーター402Mの近傍に位置している。
The mounting
これら2つの取付部32および取付部33は、それぞれ、第1アーム12の側面から突出した凸部と、凸部に形成された孔(雌ネジ)とで構成されている。
Each of these two mounting
また、取付部34は、第2アーム13の先端部の側面に設けられていて、モーター403Mの近傍に位置している。この取付部34は、第2アーム13の側面から突出した凸部と、凸部に形成された孔(雌ネジ)とで構成されている。
The mounting
取付部35は、2つの凸部351を有する板状の部材である。取付部35は、2つの凸部351が第4アーム15の側面(図16の矢印X方向から見た正面)から突出するように第4アーム15に取り付けられていて、モーター404Mおよびモーター405Mの近傍に設けられている。また、凸部351には、孔(雌ネジ)が形成されている。
The mounting
取付部36も、取付部35と同様に、2つの凸部361を有する板状の部材である。取付部36は、2つの凸部361が第5アーム16の側面(図16の矢印X方向から見た正面)から突出するように第6アーム17に取り付けられていて、モーター406Mの近傍に設けられている。また、凸部361には、孔(雌ネジ)が形成されている。
The
このような構成の取付機構3を有するロボット1Aに板部材40を取り付けると、図17に示すような状態となる。
When the
板部材40は、例えばメカキャリブレーションの際に用いる基準板であり、ロボットアーム10Aに対して着脱可能に取り付けることができる部材である。
The
板部材40には、その厚さ方向に貫通した複数の孔42、43、44、45、46を有している。
The
孔42は、本実施形態では2つ形成されており、2つの孔42の形状および配置は、それぞれ、取付部32に対応している。同様に、孔43は、取付部33に対応しており、孔44は、取付部34に対応している。また、同様に、孔45は、本実施形態では2つ形成されており、2つの孔45は、凸部351に対応している。また、同様に、孔46は、本実施形態では2つ形成されており、2つの孔46は、凸部361に対応している。
In the present embodiment, two
また、板部材40は、例えば、不透明でもよいが、透明であること、すなわち、光透過性を有することが好ましい。これにより、板部材40を介してロボット1Aを視認することができる。
The
以下、メカキャリブレーションの一例を説明する。なお、このメカキャリブレーションは、各アーム12〜17のブレーキの駆動を停止した状態で行う。
Hereinafter, an example of the mechanical calibration will be described. The mechanical calibration is performed in a state where the driving of the brakes of the
まず、棒状部材41の一端を取付部30に挿通し、他端を取付部31に挿通する。これにより、基台11に対して第1アーム12が位置決めされる。
First, one end of the rod-shaped
次に、図18に示すように、第1アーム12に設けられた取付部32、33に板部材40を取り付ける。この際、取付部32に孔42を対応させ、取付部33に孔43を対応させるようにして板部材40を配置する。また、板部材40の取付けは、雄ネジ421を孔42と取付部32の孔に挿通させて螺合し、雄ネジ431を孔43と取付部33の孔に挿通させて螺合すること(ネジ留め)により行う。
Next, as shown in FIG. 18, the
なお、この取付部32、33に板部材40を取り付ける際、図18に示すように、第2アーム13の先端部を板部材40に当接しない位置に配置しておく。
When the
次に、図19に示すように、第2アーム13を第2回動軸O2周りに回動させ、第2アーム13の先端部に設けられた取付部34を板部材40に当接させる。
Next, as shown in FIG. 19, the
次いで、取付部34に板部材40を取り付ける。この際、取付部34に孔44を対応させるようにして板部材40を配置する。また、板部材40の取付けは、雄ネジ441を用いたネジ留めにより行う。
Next, the
なお、この取付部34に板部材40を取り付ける際、図19に示すように、第3アーム14の基端部、第4アーム15、第5アーム16および第6アーム17を板部材40に当接しない位置に配置しておく。
When attaching the
次に、図20に示すように、第3アーム14を第3回動軸O3周りに回動させ、かつ、第4アーム15を第4回動軸O4周りに回動させて、第4アーム15に取り付けられた取付部35を板部材40に当接させる。
Next, as shown in FIG. 20, the
次いで、取付部35に板部材40を取り付ける。この際、取付部35が有する凸部351に孔45を対応させようにして板部材40を配置する。また、板部材40の取付けは、雄ネジ451を用いたネジ留めにより行う。
Next, the
なお、この取付部35に板部材40を取り付ける際、図20に示すように、第6アーム17を板部材40に当接しない位置に配置しておく。
When attaching the
次に、第5アーム16を第5回動軸O5周りに回動させ、かつ、第6アーム17を第6回動軸O6周りに回動させ、第6アーム17に取り付けられた取付部36を板部材40に当接させる。
Next, the
次いで、取付部36に板部材40を取り付ける。この際、取付部36が有する凸部361に孔46を対応させようにして板部材40を配置する。また、板部材40の取付けは、雄ネジ461を用いたネジ留めにより行う。
Next, the
このように、板部材40に対して各アーム12〜16を順番に倣うように当接させていく。これにより、図17に示すように、ロボットアーム10Aに板部材40が取り付けられる。
In this way, the
次に、モーター401M、402M、403M、404M、405Mおよび406Mについての各エンコーダーの原点(0点)を設定する。これにより、各回動軸の原点が設定される。
Next, the origin (zero point) of each encoder for the
なお、各エンコーダーの原点(0点)を設定し終えたら、板部材40および取付部35、36をロボット1Aから取り外す。
以上のようにして、ロボット1Aのメカキャリブレーションが終了する。
When the origin (zero point) of each encoder is set, the
As described above, the mechanical calibration of the
前述したように、ロボットアーム10Aが、板部材を取り付けることが可能な取付部32〜36を有することで、各回動軸の原点(各エンコーダーの原点)の設定に用いる板部材40をロボットアーム10Aに取り付けることができる。特に、取付部32〜36が孔(雌ネジ)を備える構成であるため、板部材40をネジ留めという比較的簡単な方法で取り付けることができる。
As described above, since the
また、1つの板部材40をロボットアーム10Aに当接させることで、メカキャリブレーションを行うことができるため、キャリブレーションの精度を高めることができる。
In addition, the mechanical calibration can be performed by bringing one
また、前述したように、板部材40が光透過性を有するものであると、メカキャリブレーションの際、複数の孔42、43、44、45、46と、これらにそれぞれ対応する取付部32、33、34、35、36との位置関係を把握し易い。そのため、ロボットアーム10Aに対する板部材40の取付けを容易に行うことができ、よって、メカキャリブレーションを迅速に行うことができる。
Further, as described above, when the
このようなロボット1Aによっても、ロボット1Aが干渉しないようにするための空間を小さくすることができる。
Even with such a
以上、本発明のロボットを、図示の実施形態に基づいて説明したが、本発明はこれに限定されるものではなく、各部の構成は、同様の機能を有する任意の構成のものに置換することができる。また、他の任意の構成物が付加されていてもよい。また、本発明は、前記各実施形態のうちの、任意の2以上の構成(特徴)を組み合わせたものであってもよい。 As described above, the robot of the present invention has been described based on the illustrated embodiment. However, the present invention is not limited to this, and the configuration of each unit may be replaced with an arbitrary configuration having a similar function. Can be. Further, other arbitrary components may be added. Further, the present invention may be a combination of any two or more configurations (features) of the above embodiments.
また、前記実施形態では、ロボットが有するロボットアームの回動軸の数は、6つであるが、本発明では、これに限定されず、ロボットアームの回動軸の数は、例えば、2つ、3つ、4つ、5つまたは7つ以上でもよい。また、前記実施形態では、ロボットが有するアームの数は、6つであるが、本発明では、これに限定されず、ロボットが有するアームの数は、例えば、2つ、3つ、4つ、5つ、または、7つ以上でもよい。 Further, in the above embodiment, the number of rotation axes of the robot arm of the robot is six, but the present invention is not limited to this, and the number of rotation axes of the robot arm is, for example, two. There may be three, four, five or seven or more. In the above embodiment, the number of arms of the robot is six, but the present invention is not limited to this, and the number of arms of the robot is, for example, two, three, four, There may be five or seven or more.
また、前記実施形態では、ロボットが有するロボットアームの数は、1つであるが、本発明では、これに限定されず、ロボットが有するロボットアームの数は、例えば、2つ以上でもよい。すなわち、ロボットは、例えば、双腕ロボット等の複数腕ロボットであってもよい。 In the above-described embodiment, the number of robot arms included in the robot is one. However, the present invention is not limited to this. For example, the number of robot arms included in the robot may be two or more. That is, the robot may be, for example, a multi-arm robot such as a dual-arm robot.
また、前記実施形態では、第1部材は1つのアーム(第1アーム)で構成され、第2部材は、1つのアーム(第2アーム)で構成されているとしたが、例えばロボットが有するアームの数によっては、第1部材が2つ以上のアームで構成されていてもよいし、また、第2部材が2つ以上のアームで構成されていてもよい。 In the above embodiment, the first member is configured by one arm (first arm), and the second member is configured by one arm (second arm). Depending on the number, the first member may be configured with two or more arms, or the second member may be configured with two or more arms.
また、前記実施形態では、第3部材は2つのアーム(第3アームおよび第4アーム)で構成され、第4部材は、2つのアーム(第5アームおよび第6アーム)で構成されているとしたが、例えばロボットが有するアームの数によっては、第3部材が1つまたは3つ以上のアームで構成されていてもよいし、また、第4部材が1つまたは3つ以上のアームで構成されていてもよい。 In the above-described embodiment, the third member includes two arms (a third arm and a fourth arm), and the fourth member includes two arms (a fifth arm and a sixth arm). However, for example, the third member may be configured with one or three or more arms, or the fourth member may be configured with one or three or more arms, depending on the number of arms that the robot has, for example. It may be.
また、前記実施形態では、ロボットアームの先端に設けられたエンドエフェクターが、第1状態において、第1部材の回動軸の軸方向から見たとき、第2部材と重なる第2状態となる構成のロボットを例に説明したが、ロボットアームの先端が、第1状態において、第1部材の回動軸の軸方向から見たとき、第2部材と重なる第2状態となる構成のロボットであってもよい。このロボットアームの先端が、第2部材と重なる第2状態となる構成のロボットであっても、前記実施形態と同様の効果を発揮することができる。 Further, in the above-described embodiment, the end effector provided at the tip of the robot arm is in the second state, in the first state, overlapping the second member when viewed from the axial direction of the rotation axis of the first member. In the first state, when viewed from the axial direction of the rotation axis of the first member, the robot is configured to be in the second state overlapping the second member. You may. The same effect as in the above embodiment can be exerted even with a robot having a configuration in which the tip of the robot arm is in the second state in which the robot arm overlaps the second member.
また、前記実施形態では、基台に対する第1部材の回動軸(第1アームの第1回動軸)と、第1部材に対する第2部材の回動軸(第2アームの第2回動軸)とが、交差している構成のロボットを例に説明したが、本発明のロボットは、例えば、基台に対する第1部材の回動軸と、第1部材に対する第2部材の回動軸とが、平行である構成のロボットであってもよい。 In the above embodiment, the rotation axis of the first member with respect to the base (the first rotation axis of the first arm) and the rotation axis of the second member with respect to the first member (the second rotation axis of the second arm). And the axis of the first member have been described as an example, but the robot of the present invention is, for example, a rotation axis of the first member with respect to the base and a rotation axis of the second member with respect to the first member. May be parallel robots.
1…ロボット、1A…ロボット、3…取付機構、10…ロボットアーム、10A…ロボットアーム、11…基台、12…第1アーム、13…第2アーム、14…第3アーム、15…第4アーム、16…第5アーム、17…第6アーム、30…取付部、31…取付部、32…取付部、33…取付部、34…取付部、35…取付部、36…取付部、40…板部材、41…棒状部材、42…孔、43…孔、44…孔、45…孔、46…孔、61…軸受部、62…矢印、63…矢印、64…矢印、91…ハンド、101…天井、102…取付面、105…領域、106…領域、107…先端領域、111…フランジ、121…第1部分、122…第2部分、123…第3部分、141…第1部分、142…第2部分、144…第2接続部、151…支持部、152…支持部、171…関節、172…関節、173…関節、174…関節、175…関節、176…関節、301…モータードライバー、302…モータードライバー、303…モータードライバー、304…モータードライバー、305…モータードライバー、306…モータードライバー、351…凸部、361…凸部、401…第1駆動源、401M…モーター、402…第2駆動源、402M…モーター、403…第3駆動源、403M…モーター、404…第4駆動源、404M…モーター、405…第5駆動源、405M…モーター、406…第6駆動源、406M…モーター、421…雄ネジ、431…雄ネジ、441…雄ネジ、451…雄ネジ、461…雄ネジ、611…中心線、1211…第1接続部、1221…第2接続部、H…ハンド径、L3…長さ、O1…第1回動軸、O2…第2回動軸、O3…第3回動軸、O4…第4回動軸、O5…第5回動軸、O6…第6回動軸、P1…距離、S…面積、X…矢印、Y…距離、θ…角度、L1…長さ、L2…長さ、R3…長さ、R1…最大長さ、621…直線、W…幅、WX…幅、RJ2…幅
DESCRIPTION OF
Claims (6)
前記第2回動軸の軸方向から見て、前記第1アームと前記第2アームと前記第3アームとが重なる第1状態になることが可能であり、
前記第1状態において、前記第1回動軸の軸方向から見たとき、前記第5アームが回動することにより、前記ロボットアームの先端または前記ロボットアームの先端に設けられたエンドエフェクターが前記第2アームと重なる第2状態となることが可能であることを特徴とするロボット。 A first arm provided on the base and rotating about the first rotation axis; and a second arm provided on the first arm and having a different axis direction from the first rotation axis. A second arm, which is provided on the second arm, and a third arm, which is provided on the second arm and rotates about the third rotation axis; and a third arm, which is provided on the third arm and which is provided around the fourth rotation axis. A fourth arm, which is provided on the fourth arm, and a fifth arm, which is provided on the fourth arm and rotates about an axis of a fifth rotation axis having a different axis direction of the fourth rotation axis; A sixth arm that is provided and that rotates around an axis of a sixth rotation axis.
When viewed from the axial direction of the second rotation axis, the first arm, the second arm, and the third arm can be in a first state in which the first arm overlaps with the third arm,
In the first state, when viewed from the axial direction of the first rotation axis, the fifth arm rotates, so that the end effector provided at the distal end of the robot arm or the distal end of the robot arm has the above-described configuration. A robot capable of entering a second state overlapping with a second arm.
Y≦(R3/2)の関係を満足する請求項1に記載のロボット In the second state, the first rotation axis and the sixth rotation axis are orthogonal to each other, and a distance between the tip of the robot arm or the end effector and the second arm is set to Y, When the total length of the third arm and the fourth arm in the axial direction of the first rotation shaft is R3,
2. The robot according to claim 1, wherein a relationship of Y ≦ (R3 / 2) is satisfied.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015213927A JP6638327B2 (en) | 2015-10-30 | 2015-10-30 | robot |
| CN201610949150.6A CN107053252B (en) | 2015-10-30 | 2016-10-26 | Robot |
| US15/335,889 US10232517B2 (en) | 2015-10-30 | 2016-10-27 | Robot and robot system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015213927A JP6638327B2 (en) | 2015-10-30 | 2015-10-30 | robot |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017080858A JP2017080858A (en) | 2017-05-18 |
| JP2017080858A5 JP2017080858A5 (en) | 2018-11-22 |
| JP6638327B2 true JP6638327B2 (en) | 2020-01-29 |
Family
ID=58714023
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015213927A Active JP6638327B2 (en) | 2015-10-30 | 2015-10-30 | robot |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6638327B2 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019010711A (en) * | 2017-06-30 | 2019-01-24 | ブラザー工業株式会社 | Arm device, machine tool, tool member, and origin setting method |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61152380A (en) * | 1984-12-26 | 1986-07-11 | 株式会社日立製作所 | Robot |
| JPH01257579A (en) * | 1988-04-06 | 1989-10-13 | Hitachi Ltd | Manipulator |
| JP5527359B2 (en) * | 2012-06-08 | 2014-06-18 | 株式会社安川電機 | Robot cell and robot cell assembly method |
-
2015
- 2015-10-30 JP JP2015213927A patent/JP6638327B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017080858A (en) | 2017-05-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10099364B2 (en) | Robot | |
| US10189164B2 (en) | Robot, control device, and robot system | |
| US10857668B2 (en) | Robot, control device, and robot system | |
| CN108858278B (en) | Robot | |
| JP6582492B2 (en) | Robot system | |
| JP6179349B2 (en) | SCARA robot | |
| JP6582491B2 (en) | robot | |
| US20160288340A1 (en) | Robot system | |
| TWI675728B (en) | Robot and robot system | |
| JP6766339B2 (en) | Robots and robot systems | |
| JP2016190298A (en) | Robot and robot system | |
| JP2017087301A (en) | Robot, control device and robot system | |
| JP6582520B2 (en) | robot | |
| US20170210016A1 (en) | Robot | |
| US20170066129A1 (en) | Robot, control apparatus, and robot system | |
| US11389952B2 (en) | Robot arm | |
| CN108858173B (en) | Robot, robot control device, and robot system | |
| JP2016203344A (en) | robot | |
| JP6638327B2 (en) | robot | |
| JP2017080857A (en) | robot | |
| JP6300693B2 (en) | robot | |
| JP2018001313A (en) | Robot, robot control device, and robot system | |
| JP6648491B2 (en) | Control devices, robots and robot systems | |
| JP2017080856A (en) | robot | |
| JP6300706B2 (en) | Robot system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20180906 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181015 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181015 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20181116 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190910 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190917 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191108 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191126 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191209 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6638327 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |