JP6604982B2 - Excavator - Google Patents
Excavator Download PDFInfo
- Publication number
- JP6604982B2 JP6604982B2 JP2017038402A JP2017038402A JP6604982B2 JP 6604982 B2 JP6604982 B2 JP 6604982B2 JP 2017038402 A JP2017038402 A JP 2017038402A JP 2017038402 A JP2017038402 A JP 2017038402A JP 6604982 B2 JP6604982 B2 JP 6604982B2
- Authority
- JP
- Japan
- Prior art keywords
- mode
- crane
- operated
- alarm
- boom
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Landscapes
- Operation Control Of Excavators (AREA)
- Component Parts Of Construction Machinery (AREA)
- Control And Safety Of Cranes (AREA)
Description
本発明は、掘削作業及びクレーン作業が可能な油圧ショベルに関する。 The present invention relates to a hydraulic excavator capable of excavation work and crane work.
油圧ショベルは、一般的に、下部走行体と、この下部走行体の上側に旋回可能に設けられた上部旋回体と、この上部旋回体に連結され、ブーム、アーム、及び掘削作業用のバケットを有する多関節型の作業装置とを備えている。また、油圧ショベルは、エンジンと、このエンジンによって駆動される油圧ポンプと、この油圧ポンプからの圧油によって駆動され、ブーム、アーム、及びバケットをそれぞれ回動させるブームシリンダ、アームシリンダ、及びバケットシリンダとを備えている。 In general, a hydraulic excavator includes a lower traveling body, an upper revolving body provided on the upper side of the lower traveling body, and an upper revolving body connected to the upper revolving body, and a boom, an arm, and a bucket for excavation work. And an articulated working device. Further, the hydraulic excavator includes an engine, a hydraulic pump driven by the engine, and a boom cylinder, an arm cylinder, and a bucket cylinder that are driven by pressure oil from the hydraulic pump to rotate the boom, the arm, and the bucket, respectively. And.
また、油圧ショベルにおける上部旋回体の運転室内には、エンジンの起動指示及び停止指示等を行うキースイッチと、運転室の乗降口に設けられ、乗降許可位置(上昇位置)と乗降規制位置(下降位置)に操作されるゲートロックレバーと、このゲートロックレバーが乗降規制位置に操作された場合に、ブームシリンダ、アームシリンダ、及びバケットシリンダを含む複数のアクチュエータの駆動を許可し、ゲートロックレバーが乗降許可位置に操作された場合に、複数のアクチュエータの駆動を禁止するロック装置とを備えている。 Also, in the cab of the upper swing body in the hydraulic excavator, a key switch for instructing start and stop of the engine and the like are provided at the entrance / exit of the cab, and the entry / exit position (up position) and the entry / exit restriction position (down) The gate lock lever operated to the position), and when this gate lock lever is operated to the entry / exit restriction position, the drive of a plurality of actuators including a boom cylinder, an arm cylinder, and a bucket cylinder is permitted. And a lock device that prohibits driving of a plurality of actuators when operated to the boarding / alighting permission position.
上述した油圧ショベルは、掘削作業だけではなく、クレーン作業が可能なものが知られている(例えば特許文献1参照)。特許文献1の油圧ショベルは、作業装置のアームの先端部に設けられたクレーン作業用のフックと、運転室内に設けられ、掘削モード及びクレーンモードのうちの一方を選択するモードスイッチと、このモードスイッチでクレーンモードが選択された場合に、フックを用いて吊り上げた荷の実荷重を演算するコントローラとを備えている。
The hydraulic excavator described above is known not only for excavation work but also for crane work (see, for example, Patent Document 1). The hydraulic excavator of
コントローラは、ブーム角度センサで検出されたブームの回動角度、アーム角度センサで検出されたアームの回動角度、並びに圧力センサで検出されたブームシリンダのロッド側圧力及びボトム側圧力に基づき、フックを用いて吊り上げた荷の実荷重を演算する。そして、コントローラは、演算した実荷重が基準値(詳細には、定格荷重、若しくは定格荷重より小さくなるように予め設定された値)を超えたか否かを判定し、この判定が肯定された場合に運転室内の警報ランプ及び警報ブザーを作動させる信号を出力して警報を発生させる。これにより、実荷重が基準値を超えたことを、運転者が十分に認識することができる。 The controller uses the boom rotation angle detected by the boom angle sensor, the arm rotation angle detected by the arm angle sensor, and the boom cylinder rod side pressure and bottom side pressure detected by the pressure sensor. The actual load of the lifted load is calculated using. Then, the controller determines whether or not the calculated actual load exceeds a reference value (specifically, the rated load or a value set in advance so as to be smaller than the rated load), and when this determination is affirmed A signal for operating an alarm lamp and an alarm buzzer in the cab is output to generate an alarm. Accordingly, the driver can sufficiently recognize that the actual load has exceeded the reference value.
ところで、油圧ショベルは、フックを用いた吊り荷状態で、クレーン作業を中断することが可能である。詳しく説明すると、油圧ショベルを吊り荷状態で、かつエンジンを作動させた状態で、ゲートロックレバーを乗降許可位置に操作することにより、運転者が運転室から降りることが可能である。また、油圧ショベルを吊り荷状態で、かつキースイッチをOFF位置に操作してエンジンを停止させた後、ゲートロックレバーを乗降許可位置に操作して、運転者が運転室から降りることが可能である。 By the way, the hydraulic excavator can interrupt the crane work in a suspended load state using a hook. More specifically, the driver can get out of the driver's cab by operating the gate lock lever to the entry / exit permission position with the hydraulic excavator suspended and the engine operated. It is also possible for the driver to get out of the cab by operating the gate lock lever to the entry / exit permission position after stopping the engine by operating the key switch to the OFF position with the hydraulic excavator suspended. is there.
しかし、吊り荷状態にあるときは、吊り荷の下にものを入れないように注意を払う必要がある。そのため、吊り荷状態でクレーン作業を中断することをできる限り行わないことが望ましい。すなわち、荷を下ろした後に油圧ショベルから離れる様にした方がよい。 However, when in a suspended load state, care must be taken not to put anything under the suspended load. For this reason, it is desirable that the crane operation is not interrupted as much as possible in the suspended load state. In other words, it is better to leave the excavator after unloading.
本発明は、上記事情に鑑みてなされたものであり、その目的は、吊り荷状態でクレーン作業を中断させない様に注意を促すことができる油圧ショベルを提供することにある。 The present invention has been made in view of the above circumstances, and an object thereof is to provide a hydraulic excavator capable of calling attention so as not to interrupt crane work in a suspended load state.
上記目的を達成するために、本発明は、下部走行体と、前記下部走行体の上側に旋回可能に設けられた上部旋回体と、前記上部旋回体に連結され、ブーム、アーム、掘削作業用のバケット、及びクレーン作業用のフックを有する多関節型の作業装置と、原動機と、前記原動機によって駆動される油圧ポンプと、前記油圧ポンプからの圧油によって駆動され、前記ブーム、前記アーム、及び前記バケットをそれぞれ回動させるブームシリンダ、アームシリンダ、及びバケットシリンダと、前記上部旋回体の運転室内に設けられ、前記原動機の起動指示及び停止指示を行う原動機スイッチと、前記運転室の乗降口に設けられ、乗降許可位置と乗降規制位置に操作されるゲートロックレバーと、前記ゲートロックレバーが乗降規制位置に操作された場合に、前記ブームシリンダ、前記アームシリンダ、及び前記バケットシリンダを含む複数のアクチュエータの駆動を許可する一方、前記ゲートロックレバーが乗降許可位置に操作された場合に、前記複数のアクチュエータの駆動を禁止するロック装置と、前記運転室内に設けられ、掘削モード及びクレーンモードのうちの一方を選択するモード選択装置と、前記アームの回動角度を検出するアーム角度センサと、前記ブームの回動角度を検出するブーム角度センサと、前記ブームシリンダのロッド側圧力及びボトム側圧力をそれぞれ検出する圧力センサと、前記モード選択装置でクレーンモードが選択された場合に、前記アーム角度センサ、前記ブーム角度センサ、及び前記圧力センサの検出結果に基づき、前記フックを用いて吊り上げた荷の実荷重を演算し、前記実荷重が予め定格荷重に基づいて設定された基準値を超えたか否かを判定し、この判定が肯定された場合に第1警報を出す第1警報装置とを備えた油圧ショベルにおいて、前記ゲートロックレバーの操作位置を検出する検出装置と、前記モード選択装置でクレーンモードが選択された場合、前記フックを用いた吊り荷状態にあり且つ前記ゲートロックレバーが乗降許可位置に操作されたか否かを判定し、この判定が肯定された場合に第2警報を出す第2警報装置とを備える。 In order to achieve the above object, the present invention provides a lower traveling body, an upper revolving body provided on the upper side of the lower traveling body, and a pivot, an arm, and excavation work connected to the upper revolving body. An articulated working device having a bucket and a crane working hook, a prime mover, a hydraulic pump driven by the prime mover, driven by pressure oil from the hydraulic pump, the boom, the arm, and A boom cylinder, an arm cylinder, and a bucket cylinder that respectively rotate the bucket, a prime mover switch that is provided in an operating room of the upper swing body, and that instructs to start and stop the prime mover, and an entrance / exit of the operating room A gate lock lever provided and operated to a boarding / alighting permission position and a boarding / alighting restriction position; The plurality of actuators including the boom cylinder, the arm cylinder, and the bucket cylinder are allowed to be driven, and the plurality of actuators are prohibited from being driven when the gate lock lever is operated to the entry / exit permission position. A locking device that is provided in the cab, a mode selection device that selects one of an excavation mode and a crane mode, an arm angle sensor that detects a rotation angle of the arm, and a rotation angle of the boom. A boom angle sensor to detect, a pressure sensor to detect a rod side pressure and a bottom side pressure of the boom cylinder, and when the crane mode is selected by the mode selection device, the arm angle sensor, the boom angle sensor, And based on the detection result of the pressure sensor, it was lifted using the hook A first alarm device that determines whether or not the actual load exceeds a reference value set in advance based on the rated load, and issues a first alarm when this determination is affirmed. In the hydraulic excavator provided, when the crane mode is selected by the detection device for detecting the operation position of the gate lock lever and the mode selection device, it is in a suspended load state using the hook and the gate lock lever is moved on and off. A second alarm device that determines whether or not the permitted position has been operated and issues a second alarm when the determination is affirmative.
本発明によれば、吊り荷状態でクレーン作業を中断させない様に注意を促すことができる。 According to the present invention, attention can be urged so as not to interrupt the crane work in a suspended load state.
本発明の第1の実施形態を、図面を参照しつつ説明する。 A first embodiment of the present invention will be described with reference to the drawings.
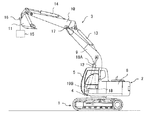
図1は、本実施形態における油圧ショベルの構造を表す側面図である。なお、以降、油圧ショベルが図1に示す状態にて、運転席に着座した運転者の前側(図1中左側)、後側(図1中右側)、左側(図1中紙面に向かって手前側)、右側(図1中紙面に向かって奥側)を、単に前側、後側、左側、右側と称する。 FIG. 1 is a side view showing the structure of a hydraulic excavator in the present embodiment. In the following, with the excavator in the state shown in FIG. 1, the front side (left side in FIG. 1), rear side (right side in FIG. 1), left side (front side of the page in FIG. 1) of the driver seated in the driver's seat Side) and right side (back side toward the paper surface in FIG. 1) are simply referred to as front side, rear side, left side, and right side.
本実施形態の油圧ショベルは、クローラ式の下部走行体1と、下部走行体1の上側に旋回可能に設けられた上部旋回体2と、上部旋回体2に連結された多関節型の作業装置3とを備えている。そして、下部走行体1は左右の走行モータ(図示せず)によって回転駆動されて走行する。また、上部旋回体2は旋回モータ(図示せず)によって回転駆動されて旋回する。
The hydraulic excavator of the present embodiment includes a crawler-type lower traveling
上部旋回体2は、基礎構造体をなす旋回フレーム4と、旋回フレーム4の前方左側に設けられたキャブタイプの運転室5と、旋回フレーム4上に搭載された機器(詳細には、後述の図2で示すエンジン6及び油圧ポンプ7等)を覆う外装カバー8とを備えている。
The
作業装置3は、旋回フレーム4に上下方向に回動可能に連結されたブーム9と、ブーム9の先端部に上下方向に回動可能に連結されたアーム10と、アーム10の先端部に上下方向に回動可能に連結された掘削作業用のバケット11とを備えている。そして、ブームシリンダ12、アームシリンダ13、及びバケットシリンダ14の伸縮駆動により、ブーム9、アーム10、及びバケット11がそれぞれ回動するようになっている。アーム10の先端部にはクレーン作業用(すなわち、例えば荷15を吊るため)のフック16が設けられている。
The
アーム10の基端部には、ブーム9に対するアーム10の回動角度を検出するアーム角度センサ17が取付けられている。ブーム9の基端部には、旋回フレーム4に対するブーム9の回動角度を検出するブーム角度センサ18が取付けられている。ブームシリンダ12のロッド側(図1中上側)油室及びボトム側(図1中下側)油室には、それぞれの内圧を検出する圧力センサ19A,19Bが取付けられている。アーム角度センサ17、ブーム角度センサ18、及び圧力センサ19A,19Bの検出結果は、車体コントローラ20(後述の図3参照)に出力されるようになっている。
An
運転室5には、運転者が着座する運転席(図示せず)が設けられている。運転席の前側には、左右の走行モータの駆動をそれぞれ指示する走行用操作装置(図示せず)が設けられている。運転席の左側には、旋回モータの駆動及びアームシリンダ13の駆動を指示する十字操作式の作業用操作装置(図示せず)が設けられている。運転席の右側には、ブームシリンダ12の駆動及びバケットシリンダ14の駆動を指示する十字操作式の作業用操作装置21(後述の図2参照)が設けられている。
The driver's
運転席の左側(言い換えれば、運転室5の乗降口)には、乗降許可位置と乗降規制位置に操作されるゲートロックレバー22(後述の図2参照)と、ゲートロックレバー22の操作位置を検出するロックスイッチ23(後述の図2及び図3参照)が設けられている。ゲートロックレバー22は、乗降許可位置(上昇位置)に操作された場合に運転者の乗降を許容し、乗降規制位置(下降位置)に操作された場合に運転者の乗降を妨げるようになっている。
On the left side of the driver's seat (in other words, the entrance / exit of the driver's cab 5), there are a gate lock lever 22 (see FIG. 2 described later) operated to a boarding / alighting permission position and a boarding / alighting restriction position, and an operation position of the gate lock lever 22 A lock switch 23 (see FIGS. 2 and 3 to be described later) for detection is provided. The
運転席の右側にはキースイッチ24(後述の図3参照)が設けられ、運転席の前方右側には表示装置25(後述の図3参照)が設けられている。キースイッチ24は、キーを挿入・抜出し可能とし、キーの回転操作に応じてエンジン6の起動・停止等を指示するものである。詳細には、キーがOFF位置からON位置に操作されると、車体コントローラ20、表示装置25、及びエンジンコントローラ26(後述の図3参照)を含む複数の電装品の電源オンを指示し、さらにON位置からSTART位置に操作されると、エンジン6の起動を指示する。その後、運転者がキーから手を離すと、キーがSTART位置からON位置に自動的に戻る。また、キーがON位置からOFF位置に操作されると、エンジン6の停止とともに、複数の電装品の電源オフを指示するようになっている。
A key switch 24 (see FIG. 3 described later) is provided on the right side of the driver seat, and a display device 25 (see FIG. 3 described later) is provided on the front right side of the driver seat. The
次に、本実施形態の油圧ショベルの油圧駆動装置について説明する。図2は、本実施形態における油圧ショベルの油圧駆動装置の構成のうち、代表として、ブームシリンダ12の駆動に係わる構成を表す油圧回路図である。
Next, a hydraulic drive device for a hydraulic excavator according to the present embodiment will be described. FIG. 2 is a hydraulic circuit diagram showing a configuration related to driving of the
本実施形態の油圧駆動装置は、エンジン6と、エンジン6によって駆動される油圧ポンプ7及びパイロットポンプ27と、油圧ポンプ7からブームシリンダ12への圧油の流れを制御する油圧パイロット方式の方向切換弁28と、作業用操作装置21とを備えている。
The hydraulic drive device according to the present embodiment includes an
作業用操作装置21は、操作レバー29と、操作レバー29の中立位置から前側の操作量に応じてパイロットリリーフ弁27aによって設定されたパイロットポンプ27の吐出圧を減圧してパイロット圧を生成するパイロット弁30Aと、操作レバー29の中立位置から後側の操作量に応じてパイロットポンプ27の吐出圧を減圧してパイロット圧を生成するパイロット弁30Bとを有している。
The
そして、操作レバー29を中立位置から前側に操作すると、その操作量に応じてパイロット弁30Aで生成されたパイロット圧が方向切換弁28の受圧部31Aへ出力され、これによって方向切換弁28が図中右側の切換位置に切換えられる。これにより、ブームシリンダ12が縮短するようになっている。また、操作レバー29を中立位置から後側に操作すると、その操作量に応じてパイロット弁30Bで生成されたパイロット圧が方向切換弁28の受圧部31Bへ出力され、これによって方向切換弁28が図中左側の切換位置に切換えられる。これにより、ブームシリンダ12が伸長するようになっている。
When the
なお、他のアクチュエータ(詳細には、アームシリンダ13及びバケットシリンダ14等)の駆動に係わる構成も、ブームシリンダ12の駆動に係わる構成と同様である。すなわち、対応する操作装置からのパイロット圧によって対応する方向切換弁が切換えられ、この方向切換弁を介し供給された油圧ポンプ7からの圧油によって他のアクチュエータが駆動するようになっている。
The configuration related to driving of other actuators (specifically, the
パイロットポンプ27の吐出油路にはロックバルブ32が設けられており、このロックバルブ32は、上述したゲートロックレバー22の操作に応じて切換えられるようになっている。詳しく説明すると、ゲートロックレバー22が乗降規制位置(下降位置、言い換えれば、アンロック位置)に操作されてロックスイッチ23が閉接点となる場合、ロックスイッチ23を介してロックバルブ32のソレノイド部33が通電されて、ロックバルブ32が図中左側の切換位置に切換えられる。これにより、パイロットポンプ27の吐出油路が連通状態となり、パイロットポンプ27の吐出圧が作業用操作装置21を含む複数の操作装置に導入される。したがって、ブームシリンダ12を含む複数のアクチュエータの駆動を許可するようになっている。
A
一方、ゲートロックレバー22が乗降許可位置(上昇位置、言い換えれば、ロック位置)に操作されてロックスイッチ23が開接点となる場合、ロックバルブ32のソレノイド部33が通電されず、バネ34の付勢力によってロックバルブ32が図中右側の切換位置に切換えられる。これにより、パイロットポンプ27の吐出油路が遮断状態となる。したがって、ブームシリンダ12を含む複数のアクチュエータの駆動を禁止するようになっている。
On the other hand, when the
次に、本実施形態の油圧ショベルの制御系について説明する。図3は、本実施形態における油圧ショベルの制御系の構成を表すブロック図である。 Next, the control system of the hydraulic excavator of this embodiment will be described. FIG. 3 is a block diagram showing the configuration of the control system of the hydraulic excavator in the present embodiment.
本実施形態の制御系は、バッテリ35、キースイッチ24、車体コントローラ20、表示装置25、及びエンジンコントローラ26等を備えている。車体コントローラ20、表示装置25、及びエンジンコントローラ26は、CAN(Controller Area Network)を介し互いに通信可能に接続されている。
The control system of this embodiment includes a
キースイッチ24は、B端子、ACC端子、及びC端子を有しており、その操作位置に応じてB端子、ACC端子、及びC端子の接続が切換わるように構成されている。詳細には、キースイッチ24がOFF位置に操作されると、B端子、ACC端子、及びC端子が互いに接続されないようになっている。キースイッチ24がON位置に操作されると、B端子及びACC端子が互いに接続されるようになっている。キースイッチ24がSTART位置に操作されると、B端子、ACC端子、及びC端子が互いに接続されるようになっている。
The
キースイッチ24のB端子は、表示装置25及びエンジンコントローラ26と共に、バッテリ35に接続されている。キースイッチ24のACC端子は車体コントローラ20、表示装置25、エンジンコントローラ26、及び他の電装品(図示せず)に接続されている。キースイッチ24のC端子は、エンジンコントローラ26に接続されている。
The B terminal of the
そして、キースイッチ24がOFF位置からSTART位置又はON位置に操作されたとき、車体コントローラ20、表示装置25、及びエンジンコントローラ26の電源がONとなる。キースイッチ24がSTART位置又はON位置からOFF位置に操作されたとき、車体コントローラ20の電源が即座にオフとなる。また、表示装置25が即座に若しくは後述の処理を行ってから自身の電源をオフとし、エンジンコントローラ26がエンジン6を停止させてから自身の電源をオフとする。
When the
表示装置25は、上述したように運転室5内に設けられており、制御部36、モードスイッチ37、モードランプ38、モニタ39、及びブザー40を有している。モードスイッチ37は、運転者の操作によって掘削モード及びクレーンモードのうちの一方を選択し、その選択信号を制御部36に出力する。制御部36は、モードスイッチ37からの選択信号に基づいてクレーンモードが選択されたか否かを判定し、その判定結果を車体コントローラ20に送信する。また、制御部36は、モードスイッチ37でクレーンモードが選択された場合に、モードランプ38及び回転灯41を点灯させる一方、モードスイッチ37で掘削モードが選択された場合に、モードランプ38及び回転灯41を消灯させるようになっている。回転灯41は、上部旋回体2の運転室5の外側に設けられている。
The
車体コントローラ20は、演算部42及び判定部43を有している。演算部42は、モードスイッチ37でクレーンモードが選択された場合、アーム角度センサ17、ブーム角度センサ18、及び圧力センサ19A,19Bの検出結果に基づき、フック16を用いて吊り上げた荷15の位置及び実荷重を演算する。詳細には、圧力センサ19A,19Bで検出されたブームシリンダ12のロッド側圧力及びボトム側圧力から、ブームシリンダ12の保持力モーメントを演算する。また、アーム角度センサ17及びブーム角度センサ18で検出されたアーム10の回動角度及びブーム9の回動角度等から、作業装置3のモーメント及び荷15の位置を演算する。そして、演算したブームシリンダ12の保持力モーメントと作業装置3のモーメントとの差が荷15のモーメントとなり、この荷15のモーメントから荷15の実荷重を演算する。演算部42は、演算した荷15の実荷重を判定部43に出力し、演算した荷15の位置及び実荷重を表示装置25に送信する。
The
車体コントローラ20の判定部43は、定格荷重(言い換えれば、フック16を用いて吊り上げ可能な荷の最大荷重)及びこの定格荷重に基づいて予め設定された基準値(詳細には、例えば定格荷重の95%)を記憶している。そして、演算部42で演算された実荷重が基準値を超えたか否かを判定し、その判定結果を定格荷重と共に表示装置25に送信する。
The
表示装置25の制御部36は、モードスイッチ37でクレーンモードが選択された場合、車体コントローラ20から受信した荷15の位置、実荷重、及び定格荷重をモニタ39に表示させる。また、車体コントローラ20の判定部43で実荷重が基準値を超えたと判定された場合、ブザー40を吹鳴させるようになっている。
When the crane mode is selected by the
また、表示装置25の制御部36は、モードスイッチ37でクレーンモードが選択されたか否かにかかわらず、ロックスイッチ23からの信号に基づき、ゲートロックレバー22が乗降許可位置に操作されたか否かを判定しており、その判定結果をエンジンコントローラ26に送信する。
Further, the
エンジンコントローラ26は、キースイッチ24のC端子からの信号に基づき、キースイッチ24がSTART位置に操作されたか否かを判定する。そして、ゲートロックレバー22が乗降許可位置に操作され且つキースイッチ24がSTART位置に操作された場合に、エンジン6を始動させる。
The
また、エンジンコントローラ26は、キースイッチ24のACC端子からの信号に基づき、キースイッチ24がOFF位置に操作されたか否かを判定する。そして、キースイッチ24がOFF位置に操作された場合に、エンジン6を停止させる。そして、自身の電源をオフとするようになっている。
Further, the
ここで本実施形態の大きな特徴として、表示装置25の制御部36は、モードスイッチ37でクレーンモードが選択された場合、車体コントローラ20から受信した荷15の実荷重が所定の閾値以上であるか否かを判定することにより、フック16を用いた吊り荷状態であるか否かを判定する。また、前述したようにロックスイッチ23からの信号に基づき、ゲートロックレバー22が乗降許可位置に操作されたか否かを判定する。また、キースイッチ24のACC端子からの信号に基づき、キースイッチ24がOFF位置に操作されたか否かを判定する。これらの判定結果により、吊り荷状態のまま、クレーン作業が中断されたか否かを判定する。そして、吊り荷状態のまま、クレーン作業が中断されたと判定した場合に、モニタ39及びブザー40を制御して警報を出させる。すなわち、モニタ39に警告表示を行わせるとともに、ブザー40を吹鳴させる。このようなクレーン作業中断警報制御の処理手順を、図4を用いて説明する。
Here, as a major feature of the present embodiment, when the crane mode is selected by the
図4は、本実施形態における表示装置25のクレーン作業中断警報制御の処理内容を表わすフローチャートである。なお、本制御は、エンジン6が起動されて、ゲートロックレバー22が乗降規制位置に操作されてから開始するものとする。
FIG. 4 is a flowchart showing the processing contents of the crane work interruption alarm control of the
まず、ステップS50にて、表示装置25の制御部36は、モードスイッチ37でクレーンモードが選択されたか否かを判定する。モードスイッチ37で掘削モードが選択された場合は、ステップS50の判定が否定され(NO)、ステップS51に移る。ステップS51では、制御部36は、キースイッチ24がOFF位置に操作されたか否かを判定する。キースイッチ24がOFF位置に操作されてない場合は、ステップS51の判定が否定され(NO)、前述のステップS50に戻って上記同様の手順を繰り返す。一方、キースイッチ24がOFF位置に操作された場合は、ステップS51の判定が肯定され(YES)、本制御が終了する。
First, in step S50, the
ステップS50にてモードスイッチ37でクレーンモードが選択された場合は、その判定が肯定され(YES)、ステップS52に移る。ステップS52では、制御部36は、吊り荷状態であるか否かを判定する。吊り荷状態でない場合は、ステップS52の判定が否定され(NO)、前述のステップS51に移って上記同様の手順を繰り返す。一方、吊り荷状態である場合は、ステップS52の判定が肯定され(YES)、ステップS53に移る。ステップS53では、制御部36は、キースイッチ24がOFF位置に操作されたか否かを判定する。キースイッチ24がOFF位置に操作されてない場合は、ステップS53の判定が否定され(NO)、ステップS54に移る。
When the crane mode is selected with the
ステップS54では、制御部36は、ゲートロックレバー22が乗降許可位置に操作されたか否かを判定する。ゲートロックレバー22が乗降規制位置に操作された場合は、ステップS54の判定が否定され(NO)、前述のステップS50に移って上記同様の手順を繰り返す。一方、ゲートロックレバー22が乗降許可位置に操作された場合は、ステップS54の判定が肯定され(YES)、ステップS55に移る。
In step S54, the
ステップS55では、制御部36は、モニタ39及びブザー40を制御して警報を作動させる。すなわち、モニタ39に警告表示を行わせるとともに、ブザー40を吹鳴させる。そして、ステップS56に進み、制御部36は、警報時間が規定時間に達しているか否かを判定する。警報時間が規定時間に達してない場合は、ステップS56の判定が否定され(NO)、ステップS57に移る。ステップS57では、制御部36は、吊り荷状態が解消したか否かを判定する。吊り荷状態が解消してない場合は、ステップS57の判定が否定され(NO)、前述のステップS50に戻って上記同様の手順を繰り返す。
In step S55, the
ステップS55の警報が繰り返されて、ステップS56にて警報時間が規定時間に達した場合、その判定が肯定され(YES)、ステップS58に移る。また、ステップS57にて吊り荷状態が解消した場合、その判定が肯定され(YES)、ステップS58に移る。ステップS58では、制御部36は、モニタ39及びブザー40を制御して警報を停止させる。そして、前述のステップS50に戻って上記同様の手順を繰り返す。
If the alarm in step S55 is repeated and the alarm time reaches the specified time in step S56, the determination is affirmed (YES), and the process proceeds to step S58. Moreover, when the suspended load state is eliminated in step S57, the determination is affirmed (YES), and the process proceeds to step S58. In step S58, the
ステップS53にてキースイッチ24がOFF位置に操作された場合は、その判定が肯定され(YES)、ステップS59に移る。ステップS59では、制御部36は、モニタ39及びブザー40を制御して警報を規定時間作動させる。そして、本制御が終了する。
If the
なお、上記において、エンジン6は、特許請求の範囲に記載の原動機を構成し、キースイッチ24は、原動機の起動指示及び停止指示を行う原動機スイッチを構成する。ロックバルブ32は、ゲートロックレバーが乗降規制位置に操作された場合に、ブームシリンダ、アームシリンダ、及びバケットシリンダを含む複数のアクチュエータの駆動を許可する一方、ゲートロックレバーが乗降許可位置に操作された場合に、複数のアクチュエータの駆動を禁止するロック装置を構成する。
In the above description, the
モードスイッチ37は、掘削モード及びクレーンモードのうちの一方を選択するモード選択装置を構成する。車体コントローラ20の演算部42及び判定部43と表示装置25の制御部36及びブザー40は、モード選択装置でクレーンモードが選択された場合に、アーム角度センサ、ブーム角度センサ、及び圧力センサの検出結果に基づき、フックを用いて吊り上げた荷の実荷重を演算し、実荷重が予め定格荷重に基づいて設定された基準値を超えたか否かを判定し、この判定が肯定された場合に第1警報を出す第1警報装置を構成する。
The
ロックスイッチ23は、ゲートロックレバーの操作位置を検出する検出装置を構成する。表示装置25の制御部36(図4のステップS50、S52、S54、S55参照)、モニタ39、及びブザー40は、モード選択装置でクレーンモードが選択された場合、フックを用いた吊り荷状態にあり且つゲートロックレバーが乗降許可位置に操作されたか否かを判定し、この判定が肯定された場合に第2警報を出す第2警報装置を構成する。
The
また、表示装置25の制御部36(図4のステップS50、S52、S53、S59参照)、モニタ39、及びブザー40は、モード選択装置でクレーンモードが選択された場合、フックを用いた吊り荷状態にあり且つ原動機スイッチによる原動機の停止指示が行われたか否かを更に判定し、この判定が肯定された場合に第3警報を出す第2警報装置を構成する。
Further, the control unit 36 (see steps S50, S52, S53, and S59 in FIG. 4), the
次に、本実施形態の動作及び作用効果を説明する。 Next, the operation and effect of this embodiment will be described.
運転者は、フック16を用いた吊り荷状態のまま、クレーン作業を中断することが可能である。すなわち、運転者は、吊り荷状態のまま、例えばエンジン6を停止させることなく、ゲートロックレバー22を乗降許可位置に操作して、運転室5から降りることが可能である。この場合、上述の図4のステップS50及びS52〜S54を経由してステップS55に進み、運転室5内の表示装置25のモニタ39及びブザー40が警報を出す。あるいは、運転者は、例えばキースイッチ24をOFF位置に操作してエンジン6を停止させてから、ゲートロックレバー22を乗降許可位置に操作して、運転室5から降りることが可能である。この場合、上述の図4のステップS50、S52、及びS53を経由してステップS59に進み、運転室5内の表示装置25のモニタ39及びブザー40が警報を出す。
The driver can suspend the crane operation while being in a suspended load state using the
したがって、吊り荷状態でクレーン作業を中断させない様に注意を促すことができる。 Therefore, it is possible to call attention so as not to interrupt the crane work in a suspended load state.
本発明の第2の実施形態を、図5及び図6を用いて説明する。なお、本実施形態において、第1の実施形態と同等の部分は同一の符号を付し、適宜、説明を省略する。 A second embodiment of the present invention will be described with reference to FIGS. Note that in this embodiment, the same parts as those in the first embodiment are denoted by the same reference numerals, and description thereof will be omitted as appropriate.
図5は、本実施形態における油圧ショベルの制御系の構成を表すブロック図である。 FIG. 5 is a block diagram showing the configuration of the control system of the hydraulic excavator in the present embodiment.
本実施形態では、原動機スイッチとして、キースイッチ24の代わりに、プッシュスイッチ44が運転席の右側に設けられている。車体コントローラ20、エンジンコントローラ26、及び他の電装品とバッテリ35の間にはACCリレー45が設けられている。また、エンジンコントローラ26とバッテリ35の間にはCリレー46が設けられている。
In this embodiment, as a prime mover switch, a
プッシュスイッチ44は、その押し操作により、指示信号を出力するようになっている。詳細には、エンジン6が停止状態であって且つ車体コントローラ20、表示装置25、及びエンジンコントローラ26を含む複数の電装品の電源がオフ状態であれば、複数の電装品の電源をオン状態へ切換える指示信号(以降、便宜上、ON指示信号と称す)を出力する。また、エンジン6が停止状態であって且つ複数の電装品の電源がオン状態であれば、エンジン6を起動する指示信号(以降、便宜上、START指示信号と称す)を出力する。また、エンジン6が駆動状態であって且つ複数の電装品の電源がオン状態であれば、エンジン6を停止するとともに、複数の電装品の電源をオフ状態へ切換える指示信号(以降、便宜上、OFF指示信号と称す)を出力する。
The
表示装置25の制御部36Aは、プッシュスイッチ44のON指示信号を入力した場合、表示装置25の電源をオン状態へ切換える。また、ACCリレー45の接点を閉状態に切換えて、車体コントローラ20、エンジンコントローラ26、及び他の電装品の電源をオン状態へ切換えるようになっている。
When the ON instruction signal for the
表示装置25の制御部36Aは、プッシュスイッチ44のSTART指示信号を入力した場合、条件に応じて、プッシュスイッチ44のSTART指示信号を有効化又は無効化する。詳しく説明すると、ゲートロックレバー22が乗降許可位置に操作されたと判定した場合は、プッシュスイッチ44のSTART指示信号を有効化する。すなわち、Cリレー46の接点を閉状態に一時的に切換えて、Cリレー46からエンジンコントローラ26に信号を出力させる。この信号に応じて、エンジンコントローラ26がエンジン6を起動させる。
When the START instruction signal of the
一方、ゲートロックレバー22が乗降規制位置に操作されたと判定した場合は、プッシュスイッチ44のSTART指示信号を無効化する。すなわち、Cリレー46の接点を開状態のままとする。
On the other hand, if it is determined that the
表示装置25の制御部36Aは、プッシュスイッチ44のOFF指示信号を入力した場合、条件に応じて、プッシュスイッチ44のOFF指示信号を有効化又は無効化する。詳しく説明すると、モードスイッチ37で掘削モードが選択された場合は、プッシュスイッチ44のOFF指示信号を有効化する。すなわち、表示装置25の電源をオフ状態へ切換える。また、ACCリレー45の接点を開状態に切換える。これにより、車体コントローラ20及び他の電装品の電源をオフ状態へ切換える。また、ACCリレー45の切換えに応じて、エンジンコントローラ26がエンジン6を停止させ、その後、自身の電源をオフとするようになっている。
When the OFF instruction signal for the
また、モードスイッチ37でクレーンモードが選択された場合で吊り荷状態でない場合に、プッシュスイッチ44のOFF指示信号を有効化する一方、モードスイッチ37でクレーンモードが選択された場合であって吊り荷状態である場合に、プッシュスイッチ44のOFF指示信号を無効化するようになっている。
Further, when the crane mode is selected by the
また、第1の実施形態と同様、表示装置25の制御部36Aは、吊り荷状態のまま、クレーン作業が中断されたか否かを判定する。そして、吊り荷状態のまま、クレーン作業が中断されたと判定した場合に、モニタ39及びブザー40を制御して警報を出させる。すなわち、モニタ39に警告表示を行わせるとともに、ブザー40を吹鳴させる。このようなクレーン作業中断警報制御の処理手順を、図6を用いて説明する。
Further, as in the first embodiment, the
図6は、本実施形態における表示装置25のクレーン作業中断警報制御の処理内容を表わすフローチャートである。なお、本制御は、エンジン6が起動されてゲートロックレバー22が乗降規制位置に操作されてから開始するものとする。
FIG. 6 is a flowchart showing the processing contents of the crane work interruption alarm control of the
まず、ステップS60にて、表示装置25の制御部36Aは、モードスイッチ37でクレーンモードが選択されたか否かを判定する。モードスイッチ37で掘削モードが選択された場合は、ステップS60の判定が否定され(NO)、ステップS61に移る。ステップS61では、制御部36Aは、プッシュスイッチ44のOFF指示信号が入力されたか否かを判定する。プッシュスイッチ44のOFF指示信号が入力されてない場合は、ステップS61の判定が否定され(NO)、前述のステップS60に戻って上記同様の手順を繰り返す。一方、例えばプッシュスイッチ44のOFF指示信号が入力された場合は、ステップS61の判定が肯定され(YES)、ステップS62の停止制御に移る。
First, in step S60, the
ステップS62の停止制御では、表示装置25の制御部36Aは、表示装置25の電源をオフ状態へ切換える。また、ACCリレー45の接点を開状態に切換える。これにより、車体コントローラ20及び他の電装品の電源をオフ状態へ切換える。また、ACCリレー45の切換えに応じて、エンジンコントローラ26がエンジン6を停止させ、その後、自身の電源をオフとする。そして、本制御が終了する。
In the stop control in step S62, the
ステップ60にてモードスイッチ37でクレーンモードが選択された場合は、その判定が肯定され(YES)、ステップS63に移る。ステップS63では、制御部36Aは、吊り荷状態であるか否かを判定する。吊り荷状態でない場合は、ステップS63の判定が否定され(NO)、前述のステップS61に移って上記同様の手順を繰り返す。一方、吊り荷状態である場合は、ステップS63の判定が肯定され(YES)、ステップS64に移る。
When the crane mode is selected with the
ステップS64では、制御部36Aは、プッシュスイッチ44のOFF指示信号が入力されたか否かを判定する。プッシュスイッチ44のOFF指示信号が入力されてない場合は、ステップS64の判定が否定され(NO)、ステップS65に移る。ステップS65では、制御部36Aは、ゲートロックレバー22が乗降許可位置に操作されたか否かを判定する。ゲートロックレバー22が乗降規制位置に操作された場合は、ステップS65の判定が否定され(NO)、ステップS60に戻って上記同様の手順を繰り返す。一方、ゲートロックレバー22が乗降許可位置に操作された場合は、ステップS65の判定が肯定され(YES)、ステップS66に移る。
In step S64, the
ステップS66では、制御部36Aは、モニタ39及びブザー40を制御して警報を作動させる。すなわち、モニタ39に警告表示を行わせるとともに、ブザー40を吹鳴させる。そして、ステップS67に進み、制御部36Aは、警報時間が規定時間に達しているか否かを判定する。警報時間が規定時間に達してない場合は、ステップS67の判定が否定され(NO)、ステップS68に移る。ステップS68では、制御部36Aは、吊り荷状態が解消したか否かを判定する。吊り荷状態が解消してない場合は、ステップS68の判定が否定され(NO)、前述のステップS60に戻って上記同様の手順を繰り返す。
In step S66, the
ステップS66の警報が繰り返されて、ステップS67にて警報時間が規定時間に達した場合、その判定が肯定され(YES)、ステップS69に移る。また、ステップS68にて吊り荷状態が解消した場合、その判定が肯定され(YES)、ステップS69に移る。ステップS69では、制御部36Aは、モニタ39及びブザー40を制御して警報を停止させる。そして、前述のステップS60に戻って上記同様の手順を繰り返す。
When the alarm in step S66 is repeated and the alarm time reaches the specified time in step S67, the determination is affirmed (YES), and the process proceeds to step S69. Moreover, when the suspended load state is eliminated in step S68, the determination is affirmed (YES), and the process proceeds to step S69. In step S69, the
ステップS64にてプッシュスイッチ44のOFF指示信号が入力された場合は、その判定が肯定され(YES)、ステップS70に移る。ステップS70では、制御部36Aは、モニタ39及びブザー40を制御して警報を作動させる。そして、ステップS67に進み、制御部36Aは、警報時間が規定時間に達しているか否かを判定する。警報時間が規定時間に達してない場合は、ステップS67の判定が否定され(NO)、ステップS68に移る。ステップS68では、制御部36Aは、吊り荷状態が解消したか否かを判定する。吊り荷状態が解消してない場合は、ステップS68の判定が否定され(NO)、前述のステップS60に戻って上記同様の手順を繰り返す。
If an OFF instruction signal for the
ステップS70の警報が繰り返されて、ステップS67にて警報時間が規定時間に達した場合、その判定が肯定され(YES)、ステップS69に移る。また、ステップS68にて吊り荷状態が解消した場合、その判定が肯定され(YES)、ステップS69に移る。ステップS69では、制御部36Aは、モニタ39及びブザー40を制御して警報を停止させる。そして、前述のステップS60に戻って上記同様の手順を繰り返す。
When the alarm in step S70 is repeated and the alarm time reaches the specified time in step S67, the determination is affirmed (YES), and the process proceeds to step S69. Moreover, when the suspended load state is eliminated in step S68, the determination is affirmed (YES), and the process proceeds to step S69. In step S69, the
なお、上記において、表示装置25の制御部36A(図6のステップS60、S63、S65、S66参照)、モニタ39、及びブザー40は、モード選択装置でクレーンモードが選択された場合、フックを用いた吊り荷状態にあり且つゲートロックレバーが乗降許可位置に操作されたか否かを判定し、この判定が肯定された場合に第2警報を出す第2警報装置を構成する。また、表示装置25の制御部36A(図6のステップS60、S63、S64、S70参照)、モニタ39、及びブザー40は、モード選択装置でクレーンモードが選択された場合、フックを用いた吊り荷状態にあり且つ原動機スイッチによる原動機の停止指示が行われたか否かを更に判定し、この判定が肯定された場合に第3警報を出す第2警報装置を構成する。
In the above, the
次に、本実施形態の動作及び作用効果を説明する。 Next, the operation and effect of this embodiment will be described.
運転者は、吊り荷状態のまま、クレーン作業を中断することが可能である。すなわち、運転者は、吊り荷状態のまま、例えばエンジン6を停止させる意図がなく、ゲートロックレバー22を乗降許可位置に操作して、運転室5から降りることが可能である。この場合、上述の図6のステップS60及びS63〜S65を経由してステップS66に進み、運転室5内の表示装置25のモニタ39及びブザー40が警報を出す。あるいは、運転者は、例えばエンジン6を停止させる意図でプッシュスイッチ44を操作してから、ゲートロックレバー22を乗降許可位置に操作して、運転室5から降りることが可能である。この場合、上述の図6のステップS60、S63、及びS64を経由してステップS70に進み、運転室5内の表示装置25のモニタ39及びブザー40が警報を出す。また、上述の図6のステップS62に移行しないので、エンジン6が停止しない。
The driver can interrupt the crane operation while being in a suspended load state. That is, the driver can get off the
したがって、吊り荷状態でクレーン作業を中断させない様に注意を促すことができる。 Therefore, it is possible to call attention so as not to interrupt the crane work in a suspended load state.
なお、第1及び第2の実施形態においては、図4のステップS55,S59及び図6のステップS66,S70の警報が、モニタ39の警告表示とブザー40の吹鳴である場合を例にとって説明したが、これに限られず、本発明の趣旨及び技術思想を逸脱しない範囲内で変形が可能である。すなわち、図4のステップS55,S59及び図6のステップS66,S70の警報が、例えばモニタ39の警告表示のみ、若しくはブザー40の吹鳴のみでもよい。あるいは、上部旋回体2の運転室5外に設けられたホーンの吹鳴を追加してもよい。また、ゲートロックレバー22が乗降許可位置に操作された場合(ステップS55又はS66)とエンジン6の停止指示が行われた場合(ステップS59又はS70)で、警報の種類(すなわち、報知器又は警報方法)を異ならせてもよい。
In the first and second embodiments, the case where the alarms in steps S55 and S59 in FIG. 4 and the alarms in steps S66 and S70 in FIG. 6 are the warning display on the
また、第1及び第2の実施形態においては、モードスイッチ37でクレーンモードが選択されたとき、フック16を用いた吊り荷状態にあり且つゲートロックレバー22が乗降許可位置に操作されたか否かを判定し、この判定が肯定された場合に警報を出す第1機能と、モードスイッチ37でクレーンモードが選択されたとき、フック16を用いた吊り荷状態にあり且つキースイッチ24又はプッシュスイッチ44によるエンジン6の停止指示が行われたか否かを判定し、この判定が肯定された場合に警報を出す第2機能とを有する場合を例にとって説明したが、これに限られず、本発明の趣旨及び技術思想を逸脱しない範囲内で変形が可能である。すなわち、前述した第1機能を有するものの、前述した第2機能を有しなくともよい。
In the first and second embodiments, when the crane mode is selected by the
また、第1及び第2の実施形態においては、表示装置25の制御部36は、車体コントローラ20の演算部42で演算された実荷重が所定の閾値以上であるか否かを判定することにより、フック16を用いた吊り荷状態であるか否かを判定する場合を例にとって説明したが、これに限られず、本発明の趣旨及び技術思想を逸脱しない範囲内で変形が可能である。すなわち、例えば荷15を撮影するたためのカメラ等を設け、このカメラの映像に基づいて吊り荷状態であるか否かを判定してもよい。
In the first and second embodiments, the
また、第1及び第2の実施形態においては、車体コントローラ20が演算部42及び判定部43を有し、表示装置25が制御部36又は36Aを有する場合(言い換えれば、演算部42及び判定部43が一体として構成され、それらと制御部36又は36Aが別体として構成された場合)を例にとって説明したが、これに限られず、本発明の趣旨及び技術思想を逸脱しない範囲内で変形が可能である。すなわち、例えば車体コントローラ20が演算部42を有し、表示装置25が判定部43及び制御部36又は36Aを有してもよい(言い換えれば、判定部43及び制御部36又は36Aが一体として構成され、それらと演算部42が別体として構成されてもよい)。また、例えば演算部42、判定部43、及び制御部36が一体として構成されもよいし、それぞれ別体として構成されてもよい。
In the first and second embodiments, the
1 下部走行体
2 上部旋回体
3 作業装置
5 運転室
6 エンジン
7 油圧ポンプ
9 ブーム
10 アーム
11 バケット
12 ブームシリンダ
13 アームシリンダ
14 バケットシリンダ
15 荷
16 フック
17 アーム角度センサ
18 ブーム角度センサ
19A,19B 圧力センサ
20 車体コントローラ
22 ゲートロックレバー
23 ロックスイッチ
24 キースイッチ
25 表示装置
32 ロックバルブ
36 制御部
37 モードスイッチ
39 モニタ
40 ブザー
42 演算部
43 判定部
44 プッシュスイッチ
DESCRIPTION OF
Claims (3)
前記ゲートロックレバーの操作位置を検出する検出装置と、
前記モード選択装置でクレーンモードが選択された場合、前記フックを用いた吊り荷状態にあり且つ前記ゲートロックレバーが乗降許可位置に操作されたか否かを判定し、この判定が肯定された場合に第2警報を出す第2警報装置とを備えたことを特徴とする油圧ショベル。 A lower traveling body, an upper revolving body provided on the upper side of the lower traveling body, and an upper revolving body, coupled to the upper revolving body, having a boom, an arm, a bucket for excavation work, and a crane work hook. Articulated working device, prime mover, hydraulic pump driven by the prime mover, and boom cylinder and arm cylinder driven by pressure oil from the hydraulic pump to rotate the boom, the arm, and the bucket, respectively , And a bucket cylinder, a motor switch provided in a driving room of the upper swing body for instructing start and stop of the motor, and provided at a boarding / alighting opening of the driving room, operated to a boarding / alighting permission position and a boarding / alighting restriction position. When the gate lock lever is operated, and when the gate lock lever is operated to the entry / exit restriction position, A locking device that permits driving of a plurality of actuators including a cylinder and the bucket cylinder, and prohibits driving of the plurality of actuators when the gate lock lever is operated to a boarding / leaving permission position; A mode selection device that is provided and selects one of the excavation mode and the crane mode, an arm angle sensor that detects the rotation angle of the arm, a boom angle sensor that detects the rotation angle of the boom, and the boom Based on the detection results of the pressure sensor that detects the rod side pressure and the bottom side pressure of the cylinder, and the arm angle sensor, the boom angle sensor, and the pressure sensor when the crane mode is selected by the mode selection device The actual load of the load lifted using the hook is calculated, and the actual load is calculated in advance. Determining whether more than a predetermined reference value based on the rated load, the hydraulic excavator having a first and a warning device issues a first alarm if the determination is affirmative,
A detection device for detecting an operation position of the gate lock lever;
When the crane mode is selected by the mode selection device, it is determined whether or not it is in a suspended state using the hook and the gate lock lever is operated to the entry / exit permission position, and this determination is affirmed A hydraulic excavator comprising a second alarm device for issuing a second alarm.
前記第2警報装置は、前記モード選択装置でクレーンモードが選択された場合、前記フックを用いた吊り荷状態にあり且つ前記原動機スイッチによる前記原動機の停止指示が行われたか否かを更に判定し、この判定が肯定された場合に第3警報を出すことを特徴とする油圧ショベル。 The hydraulic excavator according to claim 1,
When the crane mode is selected by the mode selection device, the second alarm device further determines whether the suspension is in a suspended state using the hook and whether the motor is instructed to stop by the motor switch. The hydraulic excavator is characterized by issuing a third alarm when this determination is affirmed.
前記第2警報装置は、前記モード選択装置でクレーンモードが選択された場合で前記フックを用いた吊り荷状態でない場合に、前記原動機スイッチによる前記原動機の停止指示を有効化する一方、前記モード選択装置でクレーンモードが選択された場合で前記フックを用いた吊り荷状態である場合に、前記原動機スイッチによる前記原動機の停止指示を無効化することを特徴とする油圧ショベル。 The hydraulic excavator according to claim 2,
The second alarm device, when the crane mode is selected by the mode selection device and is not in a suspended state using the hook, validates the instruction to stop the prime mover by the prime mover switch, while the mode selection A hydraulic excavator that invalidates an instruction to stop the prime mover by the prime mover switch when the crane mode is selected by the apparatus and the crane is in a suspended load state using the hook.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017038402A JP6604982B2 (en) | 2017-03-01 | 2017-03-01 | Excavator |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017038402A JP6604982B2 (en) | 2017-03-01 | 2017-03-01 | Excavator |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018145604A JP2018145604A (en) | 2018-09-20 |
| JP2018145604A5 JP2018145604A5 (en) | 2019-02-07 |
| JP6604982B2 true JP6604982B2 (en) | 2019-11-13 |
Family
ID=63589905
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017038402A Active JP6604982B2 (en) | 2017-03-01 | 2017-03-01 | Excavator |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6604982B2 (en) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7328082B2 (en) * | 2019-08-29 | 2023-08-16 | 日立建機株式会社 | construction machinery |
| JP7217691B2 (en) * | 2019-10-31 | 2023-02-03 | 日立建機株式会社 | construction machinery |
| JP7530463B1 (en) * | 2023-02-20 | 2024-08-07 | 日立建機株式会社 | Remotely controlled work machine system and work machine |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH111943A (en) * | 1997-06-12 | 1999-01-06 | Hitachi Constr Mach Co Ltd | Safety device for work machine |
| JP2000136551A (en) * | 1998-10-30 | 2000-05-16 | Shin Caterpillar Mitsubishi Ltd | Warning method for construction machine, device therefor, and working machine |
| JP2004076351A (en) * | 2002-08-14 | 2004-03-11 | Hitachi Constr Mach Co Ltd | Alarm device for construction machine |
| JP4223377B2 (en) * | 2003-11-28 | 2009-02-12 | 住友建機製造株式会社 | Hydraulic excavator with crane function |
| JP6214327B2 (en) * | 2013-10-18 | 2017-10-18 | 日立建機株式会社 | Hybrid construction machine |
| JP2016069963A (en) * | 2014-09-30 | 2016-05-09 | 日立建機株式会社 | Construction machine |
| JP6060987B2 (en) * | 2015-02-12 | 2017-01-18 | コベルコ建機株式会社 | Work machine control device and work machine |
-
2017
- 2017-03-01 JP JP2017038402A patent/JP6604982B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018145604A (en) | 2018-09-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6966224B2 (en) | Construction machinery | |
| JP6604982B2 (en) | Excavator | |
| JP7489287B2 (en) | Construction Machinery | |
| KR20190000383A (en) | Work machine | |
| JP7552071B2 (en) | Work machine, crane, image display control method for work machine, and image display control method for crane | |
| JP2009068164A (en) | Control unit of working machine | |
| CN113167057A (en) | Shovel, control device for shovel | |
| KR20210152559A (en) | working machine | |
| JP4951650B2 (en) | Hydraulic working machine | |
| JP2020159063A (en) | Construction machine | |
| JP7415789B2 (en) | Work machines and work machine control methods | |
| JP2020063568A (en) | Work machine | |
| JP6539630B2 (en) | Small turning type hydraulic shovel | |
| JP3202263U (en) | Engine control device | |
| JP6704879B2 (en) | Construction machinery | |
| JP6462794B2 (en) | Excavator | |
| JP4486466B2 (en) | Construction machine operation function monitoring device | |
| JP2019007348A (en) | Shovel | |
| JP2019172383A (en) | Construction machinery | |
| JP4539947B2 (en) | Warning control device for construction machinery | |
| JP2020056300A (en) | Shovel | |
| JP7573133B2 (en) | Construction Machinery | |
| JP5819265B2 (en) | Construction machinery | |
| JP2019007347A (en) | Shovel | |
| JP2020190094A (en) | Work machine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181218 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181218 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190909 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190917 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191015 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6604982 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |