JP6574170B2 - サイクル式アパーチャ流量調整器システム - Google Patents
サイクル式アパーチャ流量調整器システム Download PDFInfo
- Publication number
- JP6574170B2 JP6574170B2 JP2016517736A JP2016517736A JP6574170B2 JP 6574170 B2 JP6574170 B2 JP 6574170B2 JP 2016517736 A JP2016517736 A JP 2016517736A JP 2016517736 A JP2016517736 A JP 2016517736A JP 6574170 B2 JP6574170 B2 JP 6574170B2
- Authority
- JP
- Japan
- Prior art keywords
- aperture
- fluid
- regulator system
- flow regulator
- cycle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F9/00—Methods or devices for treatment of the eyes; Devices for putting-in contact lenses; Devices to correct squinting; Apparatus to guide the blind; Protective devices for the eyes, carried on the body or in the hand
- A61F9/007—Methods or devices for eye surgery
- A61F9/00736—Instruments for removal of intra-ocular material or intra-ocular injection, e.g. cataract instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F9/00—Methods or devices for treatment of the eyes; Devices for putting-in contact lenses; Devices to correct squinting; Apparatus to guide the blind; Protective devices for the eyes, carried on the body or in the hand
- A61F9/007—Methods or devices for eye surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M1/00—Suction or pumping devices for medical purposes; Devices for carrying-off, for treatment of, or for carrying-over, body-liquids; Drainage systems
- A61M1/71—Suction drainage systems
- A61M1/74—Suction control
- A61M1/743—Suction control by changing the cross-section of the line, e.g. flow regulating valves
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M1/00—Suction or pumping devices for medical purposes; Devices for carrying-off, for treatment of, or for carrying-over, body-liquids; Drainage systems
- A61M1/71—Suction drainage systems
- A61M1/74—Suction control
- A61M1/75—Intermittent or pulsating suction
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M1/00—Suction or pumping devices for medical purposes; Devices for carrying-off, for treatment of, or for carrying-over, body-liquids; Drainage systems
- A61M1/80—Suction pumps
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M1/00—Suction or pumping devices for medical purposes; Devices for carrying-off, for treatment of, or for carrying-over, body-liquids; Drainage systems
- A61M1/84—Drainage tubes; Aspiration tips
- A61M1/842—Drainage tubes; Aspiration tips rotating
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F9/00—Methods or devices for treatment of the eyes; Devices for putting-in contact lenses; Devices to correct squinting; Apparatus to guide the blind; Protective devices for the eyes, carried on the body or in the hand
- A61F9/007—Methods or devices for eye surgery
- A61F9/00736—Instruments for removal of intra-ocular material or intra-ocular injection, e.g. cataract instruments
- A61F9/00745—Instruments for removal of intra-ocular material or intra-ocular injection, e.g. cataract instruments using mechanical vibrations, e.g. ultrasonic
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2210/00—Anatomical parts of the body
- A61M2210/06—Head
- A61M2210/0612—Eyes
Description
本出願は、本発明者により出願された以下の仮特許出願の利益を請求する。
1)2013年6月4日出願のUSPTO仮特許出願第61830792号
2)2013年10月31日出願のUSPTO仮特許出願第61897827号
本発明は、手術に関し、特に眼科手術において有利に使用され得る改善された流量調整器システムに関する。
また、例えば、ゆっくりでありながらも強力に組織断片を吸引し、超音波乳化等の補足的な組織破砕エネルギーを使用する必要性を低減するために、操作者が高い真空レベルを維持しながら手術部位からの流速を正確に制御することができるようにする、吸引ライン流量調整器システムを提供することが望ましい。
軸方向に調節可能なロータおよび「管内」弁部分を有するハンドピース
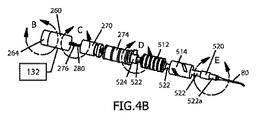
図2から8は、本発明の好ましい実施形態の異なる態様を示す。図2Aにおいて見られるように、本発明のサイクル式アパーチャ流量調整器システム60は、アクチュエータ部分62、および弁部分本体166を有する弁部分64で構成される。流量調整器シャフト280は、アクチュエータ部分62から弁部分64に機械的エネルギーを伝達する。アクチュエータ部分62は、回転シャフト262を有する回転モータ260、および軸方向変位シャフト272を有するボイスコイル直線アクチュエータ270で構成される。回転モータ260の速度は、15RPMから15,000RPMの間で調節可能である。ボイスコイルアクチュエータ270は、適切に調整されたPIDコントローラを使用して駆動される場合、50ミリ秒の負荷応答時間を有する。シャフト280は、同軸回転継手276を介して回転モータシャフト262から回転運動を受ける。シャフト280はまた、アクチュエータシャフト272を介して直線アクチュエータ270から軸方向運動を受ける。軸受282および284により、シャフト280は、シャフト280と272との間のいかなる顕著な軸方向の遊びも制限しながら、直線アクチュエータシャフト272の内側で自由に回転することができる。このようにして、線形アクチュエータ270からシャフト280に正確な軸方向運動が伝達され得る。回転位置センサ264は、モータシャフト262の角度位置を検出し、ケーブル144を通してコントローラ132に角度位置信号を提供することができる。軸方向位置センサ274は、流量調整器シャフト280の軸方向位置を検出し、ケーブル144を通してコントローラ130にシャフト軸方向位置信号を提供することができる。シャフト280は、アクチュエータ部分62を弁部分64と機械的に接続する。弁ロータ290は、弁部分64の弁本体166の内側の弁室292内に収納され、ロータ290およびチャンバ292は共に、顕著な摩擦なしに、および同時に最小限の漏出で弁室292の内側のロータ290の軸方向および回転変位を可能とするように、正確に一致した寸法で構築される。
流体アパーチャ200の断面積のサイクル式の低減は、時計の脱進機構が、ガンギ車が徐々に加速するのを回避するのと同じ様式で、また自動車が制御不能で走行するのを防止し得るエンジンブレーキと同様に、閉塞後サージを防止する。低い周波数で動作する弁64により、流体の個別の「スライス」が、各サイクルの間にアパーチャ200を通過させられる。動作の周波数が増加すると、これらのスライスの体積およびそれらの間の時間間隔が低減される。バルブ64のアパーチャサイクルの動作の周波数が十分に高いと、流体「スライス」は連続流に融合する。高い真空レベルを使用する場合、第1の流体経路110の内側のキャビテーションおよび流体経路抵抗は、アパーチャ低減サイクルの周波数が十分に高い限り、圧力および流量波の積分器として動作して一定レベルを生成する流体RC回路に適合する。これが、サイクルの周波数の増加が圧力および流量波形からのリップルを実質的に排除する1つの理由である。各サイクルの間のアパーチャ寸法の実質的な低減を含む流体アパーチャ断面積サイクルは、最大流量を効果的に制限し、閉塞後サージを防止する。第1の流動経路110の内側の合計キャビテーション気泡の全体積は、閉塞後サージの大きさの決定因子である。第1の流体経路110の体積が小さいほど、最大真空レベルにおけるシステム内の最終的な閉塞後サージの大きさは小さい。
軸方向に調節可能なロータおよび「プローブ内」弁部分を有するハンドピース:手術用プローブは、弁部分64の一部を含む。
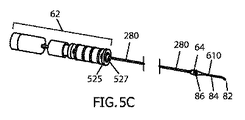
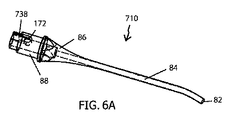
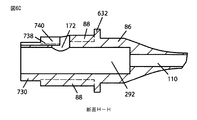
図5Aから5Gは、最大真空レベルでの使用のために第1の流体経路110の体積を最小まで低減しながら、依然として高い流量安定性を提供するための代替のアプローチとして、本発明のサイクル式アパーチャ流量調整器システム60の弁部分64が手術用プローブ610内に組み込まれた、追加の実施形態の態様を示す。手術用プローブ610が取り付けられたハンドピース600が、図5Aに示されている。筐体502が取り外されたハンドピース600が、図5Bに示されており、流量調整器システム60のアクチュエータ部分62が、以前に図4において詳細に示されたのと同様に配置されているのが示されている。図5Cにおいて、組織破砕アクチュエータ部分68および管522が共に取り外され、その下のシャフト280および手術用プローブ610が露出したハンドピース600が示されている。この実施形態において、シャフト280は、シャフト280の遠位端が、弁部分64を含む手術用プローブ610のハブ領域86と作用可能に接触するように延在している。図5Dは、管522と操作上結合された手術用プローブ610を示す。図5Eから5Gは、図5Dからの詳細領域Gの断面図を示す。ロータ290は、シャフト280の遠位端で組み込まれ、管522へのプローブ610の取り付けにより、室壁630により囲まれた弁室292内に機能的に配置され、完全な弁部分64に適合する。この実施形態において、ロータ290は、2つの窓296aおよび296b(図8Fにおいても見られる)に適合する2つの円形開口部を有する管形状の蓋294を有する。プローブ610は、流体通路172および174に組み込まれる。通路172および174の入口と、蓋294における窓296aおよび296bとの間の重なりの拡張は、アパーチャ200の断面積を決定付ける。図5Eにおいて、ロータ290は、窓296aおよび296bが流体通路チャネル172および174の入口に実質的に一致し、ほぼ最大寸法のアパーチャ200を決定付けるような軸方向および回転位置に位置しているように示されている。図5Fにおいて、ロータ290は、窓296aおよび296bが流体通路チャネル172および174の入口に部分的に一致し、中間的な寸法のアパーチャ200を決定付けるような軸方向および回転位置に位置しているように示されている。図5Fにおいて、ロータ290は、窓296aおよび296bが流体通路チャネル172および174の入口に一致せず、アパーチャ200の大幅な低減を決定付けるような軸方向および回転位置に位置しているように示されている。図6Aから6Cは、さらに詳細に、単一の流体通路172を有するチャンバ292を含む弁部分64を組み込んだ手術用プローブ710の、斜視図、正面図および断面図を示す。手術用プローブ710は、ハブ領域86内に弁部分64の固定された構成部品を提供する。これらの部品は、本質的に、1つの流体通路172を有する室壁730により限られた弁室292である。図6Cにおいて見られるように、弁排出チャネル738は、管522の内部壁と組み合わせて(図5E)、ハブ86からの切り出し体積740により通常適合される。弁排出チャネル738は、流体通路172を管522の内側の循環空間523と流体的に接続するが、これらは全て、第2の流体チャネル112への寄与部分である。ハブのリム632は、動作中に管522の遠位端とハブ86との間の密閉を提供するように配置され、両方ともねじ山88の締まりばめにより圧縮される。ロータ290は、ハンドピース600の一体部分であり、プローブ710が操作上ハンドピース600に取り付けられる場合、室292の内側に機能的に配置される。この実施形態は、弁部分64の弁室292の磨耗によりシステム60の性能が低下する前に、手術用プローブ710を交換することにより弁64の固定部分を頻繁に交換することを可能にする。ロータ290は、より拡張された用途にわたり磨耗に耐えることができるように、セラミック、ステンレススチールまたはチタン等の耐摩耗性の材料で製造され得る。図8Mは、部品の相補的動作をより良く例示するための、1)アクチュエータ部分62、シャフト280およびロータ290を少なくとも提供するハンドピース600、ならびに2)弁部分64の弁室292を提供する手術用プローブ610(全ての部品は、本発明のサイクル式アパーチャ流量調整器システム60に適合するように連動する)からの、ハンドピース600および手術用プローブ610の拡大図である。
軸方向に調節可能なロータおよび「プローブ内」弁部分を有するハンドピース:手術用プローブは、完全な弁部分64を含む。
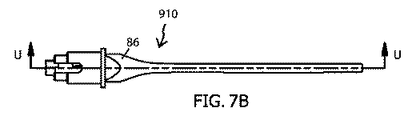
別の追加の実施形態を、図7Aから7Eに示すが、流量調整水晶体切除プローブ910が提供され、ロータ窓928を有する一致するロータ924を含む完全弁部分64を備える。室292の内側にすでに挿入されたロータ924が供給されている。ロータ924は、ロータを適所に維持するためにプローブ910により提供される蓋と組み合わせて、ロータ保持具として動作する円形狭窄932を有する。弁室292の内側で部分的に圧縮され、使用可能な軸方向変位範囲の外側端に向けてロータ924を押すばね930が、軸方向に配置されている。ばね930は、回転および圧縮の間、室292内で、およびロータ290と共に摩擦なしで摺動し得る。ハンドピース600内に組み込まれたシャフト280は、ロータ924の相補的機能926に一致するように設計される遠位端機能922を有し、弁動作のために回転運動をロータ924に同軸で伝達するのに効果的な回転インターロックをもたらす。シャフト280は、ばね930に対してロータ924にわたり制御された押出し動作を負荷し得る。このようにして、ロータ924は、コントローラ132により命令されるように回転および軸方向の力を伝達するシャフト280の動作により、正確に回転され、軸方向に位置付けられ得る。流量調整動作は、前に説明した実施形態と同様である。流量調整器システム60の完全弁部分64が各プローブ910の交換により改修され、反復的使用によりもたらされる劣化が回避される本実施形態を有する本発明のサイクル式流量調整器システムを提供することが有利となり得る。
向上した組織断片化機能を有する「プローブ内」弁部分
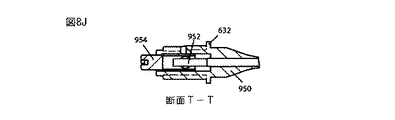
図7からの実施形態の変形例を図8Aから8Jに示すが、手術用プローブ950は、弁室292の底部と一体化した内部拍車状構造952をさらに含む完全弁部分64を有する。保持された弁ロータ954は、遠心力により周縁部に引き寄せられる室292の内側のロータ954の回転中に組織を圧縮および断片化するために、プローブ950からの拍車状構造952と組み合わせて動作する鋭いリブ等の組織断片化機能をさらに組み込んでもよい。鋭いリブ956をさらに組み込んだ従来のロータを、図8Fに示す。弁室292の内側の拍車状構造の組み込みは、ばね930のためにほとんど空間を残さない。したがって、シャフト280とロータ954との間のより精巧な回転−軸方向インターロックが、この実施形態により提供される。この代替のインターロックは、シャフト280によるロータ954の回転および軸方向駆動を可能とし、ばねを必要とせずに、回転と共に軸方向の引き込みおよび押し出し動作を可能とする。向上した組織断片化能力を有するこの実施形態の使用は、懸濁した組織断片のサイズをさらに低減することにより、流量安定性を高めることができ、特に断片が極めて硬くなり得る場合に、弁動作および流量安定性を高めることができる。
サイクル式アパーチャ流量調整器システムを有するかん流−吸引(I/A)ハンドピース:
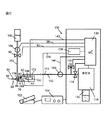
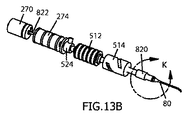
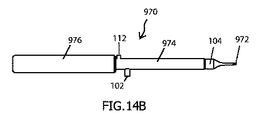
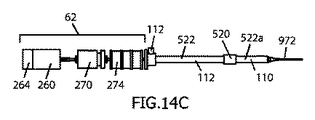
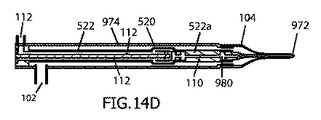
図13Aから13Dは、本発明のサイクル式アパーチャ流量調整器システムを備えるかん流−吸引手術用ハンドピース970における使用のための、本発明の一実施形態を示す。近位筐体976は、少なくとも、流量制御動作に必要なアクチュエータ部分62に適合する回転および直線アクチュエータを含み、またコントローラ132(図示せず)を含んでもよい。より小さい直径の遠位筐体974は、かん流プローブ104と流体連通したかん流ライン102の遠位部分を含む。筐体974はまた、内蔵された「管内」流量調整弁部分520を有する軸管522を含む。吸引ポート978を有する吸引プローブ972は、管522の遠位端に結合される。第1の流体経路110は、プローブ972の吸引ポート978と弁部分520の内側のアパーチャ200との間に適合される。本実施形態は、制御された流量での非常に高い真空の使用を可能とする利点と共に、従来のかん流/吸引ハンドピースを置き換えるために、有利に使用され得る。ハンドピース970は、追加的な水晶体破砕エネルギーの使用の大幅な低減を伴い、軟質から中程度の密度の水晶体断片を、ポート978を通して吸引することを可能にし得る。同様に、これは、例えば、水晶体を軟化するためのフェムト秒LASERの使用後に、軟化した水晶体からより効率的に水晶体断片を除去するために使用され得る。
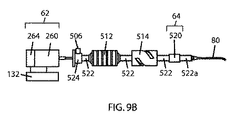
断面積RMSが固定された流量調整器システムを有するハンドピース:
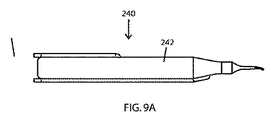
図9Aには、筐体242を有する手術用ハンドピース240の側面図が示されている。図9Bは、筐体242が取り外されたハンドピース240の内部部品を描写している。回転アクチュエータ260は、その軸の周りにシャフト280を回転させるように動作可能である。この実施形態は、室292に対するシャフト280およびロータ290の軸方向位置の調節を補助するための構造を有さない。動作中、本実施形態は、固定された軸方向位置において室292の内側のロータ290の回転をもたらし、アパーチャ200の断面積の変化のサイクルをもたらす。ロータ290の各回転サイクル中、アパーチャ200の断面積が大幅に低減または閉鎖されるサイクルの少なくとも1つの部分が存在する。本実施形態において、アパーチャ200の断面積のRMS値は、決められた通りに固定され、調節できない。本実施形態を使用する場合、吸引流量は、真空源114により提供される真空レベルを変化させることにより調節され得る。
振動アクチュエータにより駆動されるサイクル式アパーチャ流量調整器システム:
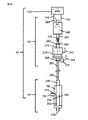
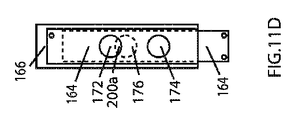
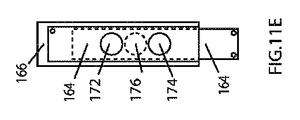
図10Aは、シャフト162により相互接続された弁部分64およびアクチュエータ部分を有する流量調整器システム60の斜視図である。本実施形態において、弁部分64は、振動運動を伝達するシャフト162を介して、単一の振動アクチュエータ160により機械的に操作される。図10Cから10Dは、図10Bからの断面図である。弁本体166は、入力ポート170および出力ポート180を有する。入力ポート170および出力ポート180は、2つの流体通路172および174を通して本体166内で流体的に接続されている。スリット178は、両方の流体通路を垂直に横切る。スリット178は、窓176を有する振動ブレード164を内部で受容する。ブレード164は、シャフト162と機械的に接続され、アクチュエータ160からの軸方向変位を受ける。シャフト162は、水密および気密シール163を有する。ブレード164における窓176は、アクチュエータ160、シャフト162およびブレード164が中央位置にある場合、ブレード164が流体通路172および174の両方を完全に消失させるように位置付けられる(図10C)。ブレード164の近位の変位をもたらすようなシャフト162に対するアクチュエータ160の操作は、窓176を流体通路174の上に位置付け、第1の流体アパーチャ200aを形成する(図10D)。ブレード164の遠位の変位をもたらすようなアクチュエータ160によるシャフト162に対する操作は、窓176を流体通路172の上に位置付け、第2の流体アパーチャ200bを形成する(図10E)。弁64の設計において「ブレークビフォーメーク(brake before make)」概念を考慮することができ、これは、1つの流体アパーチャの断面積の大幅な低減が、反対の流体アパーチャが開き始める前に生じなければならないことを意味する。図11Aから11Jに示されるように、図10Cからの中央位置の周りで振動する窓176を有するブレード164は、第1および第2の流体アパーチャ200aおよび200bの間で交代し、振動の各サイクルの間に中央位置を2回通過する。本実施形態の動作は、回転の実施形態と同様に、アクチュエータ160が、ブレード164に、一定流量および最小限のリップルを生成するのに十分に速い周波数で振動するように動力供給することにより生じる。振動の典型的な周波数は、50ヘルツ超である。本実施形態において、流速は、振動の振幅の増加がアパーチャ寸法を増加させ、その後流量を増加させるように、ブレード164の振動の振幅を変化させることにより調節され得る。流量は、アパーチャ200および201の断面積の合計のRMS値に依存する。基本実施形態と同様に、流速はまた、第2の流体経路112での真空レベルに依存する。したがって、手術用プローブ内への非閉塞流量を調整するための第2の様式は、真空を増加させて流量を増加させることである。図12におけるグラフは、1.5正弦波振動中の相に沿った全アパーチャ(アパーチャ200a+200bの合計断面積)を示す。例は、流体通路172、174および窓176に関して等しいサイズの円形開口部を有するように設計された試作弁に対応する。3つのトレースが示されている。上のトレースは、最大振動振幅に対応する。中央のトレースは、最大振幅の2/3に対応し、下のトレースは、最大振幅の1/3に対応する。水平の点線は、上のトレースにおける波形の断面積のRMS値を表す。
独立型流量調整器システム実施形態:
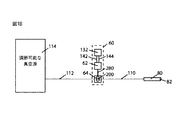
好ましい実施形態において説明されるサイクル式アパーチャ流量調整器システムは、手術コンソール150に配置された流量調整器コントローラ132により駆動されるセンサおよびアクチュエータを有するアクチュエータ部分62を有する。この動作モードは、複数の変数を統合してシステム動作を改善することを可能にするが、本発明の実施のための厳密な要件ではない。プロセッサおよびデータ保存メモリを含むコントローラ132は、アクチュエータ部分62を含む同じユニット内に組み込まれ、最終的には独立モードで動作するためにDC電源等の外部電力のみを必要とし得る。フットペダル152等のユーザインターフェースは、操作者が動作を命令するために、この独立型流量調整器システムユニットに直接接続され得る。ユニットは、さらに、第2の流体経路112に流体接続され、例えば流量調整器システム60の弁部分64内に配置され、動作の改善された制御のためにコントローラ132に接続された、真空センサ140を組み込んでもよい。流量制御システム60は、手術用ハンドピースとは独立して動作することができ、手術用ハンドピースと真空源との間の吸引経路内にインラインで配置され得る。
本発明のサイクル式流量調整器システムは、調節可能な流量と共に高真空を使用した、眼の内部等の体腔からの流体および組織断片の安定した吸引を可能とする。このようにして、外科的処置は、より速く、より安全に行うことができ、超音波またはLASER等の補助的な水晶体破砕エネルギーの必要性を低減する。
読者には、本明細書に記載のサイクル式アパーチャ変調流量調整器システムが、流量を制御し、手術用吸引ライン内側の真空の安全な使用の範囲を増加させることによって、より効率的でより安全な外科的処置を行うことを可能とすることが分かるだろう。記載された説明は、多くの具体性を含むが、これらは、範囲に対する限定として解釈されるべきではなく、むしろそのいくつかの実施形態の例示として解釈されるべきである。多くの他の変形例が可能である。システムは、主に眼科手術用に、より具体的には、白内障等の水晶体除去手術および屈折率のための水晶体除去処置用に考えられている。手術用プローブを通して流体および組織断片を除去する必要がある他の外科的処置、例えば内視鏡関節手術が、本発明の実践から利益を受けることができる。設計は、幅広く変動し得る。例えば、弁室の内側の単一または複数のアパーチャが使用されてもよい。可変流体アパーチャに適合するように関与する流体通路の入口に、多様な形状が使用されてもよい。流体窓、ポートおよび蓋に対して異なる数および形状が組み込まれてもよい。弁構成に関与する流体チャネルは、閉鎖されても開放されてもよく、そのような場合、隣接部品により完成される。異なる種類の直線および回転アクチュエータが使用されてもよい。異なる種類の運動センサが使用されてもよく、これらは全て、本発明の範囲から逸脱せずに行うことができる。したがって、範囲は、例示された実施形態(複数を含む)によってではなく、添付の特許請求の範囲およびそれらの法的な均等物によって決定されるべきである。
62 サイクル式アパーチャ流量調整アクチュエータ部分
64 サイクル式アパーチャ流量調整弁部分
68 組織破砕アクチュエータ
70 手術用ハンドピース
80 手術用プローブ
82 吸引ポート
84 プローブシャフト
86 プローブハブ
88 手術用プローブ取り付けねじ山
90 かん流弁
92 かん流弁信号ケーブル
100 流体源
102 かん流ライン
104 かん流プローブ
106 かん流圧力センサ
108 かん流センサケーブル
109 直接流体経路
110 第1の流体経路
111 吸引管
114 調節可能な真空源
116 流体廃棄物貯蔵部
118 真空制御弁
120 逃がし弁
130 プロセッサ
132 サイクル式アパーチャ流量調整コントローラ
134 組織破砕器駆動部
140 吸引圧力センサ
142 アクチュエータケーブル
143 流量調整器制御ケーブル
144 運動センサケーブル
146 組織破砕器駆動部ケーブル
150 水晶体切除コンソール
160 振動アクチュエータ
162 流量調整器振動シャフト
163 シール
164 振動ブレード
166 弁部分本体
170 弁入力部
172 流体通路
174 第2の流体通路
178 弁スリット
180 弁出力部
200 調節可能な断面積を有するアパーチャ
204 組織断片
206 通過する組織断片
208 保持された組織断片
240 固定アパーチャRMSハンドピース
242 ハンドピース筐体
247 雄ねじ山
248 雌ねじ山
249 アクチュエータ筐体
258 ねじ
260 回転モータ
262 回転モータシャフト
264 回転位置センサ
270 直線アクチュエータ
272 直線アクチュエータシャフト
274 軸方向位置センサ
276 同軸回転継手
280 流量調整器回転シャフト
282 軸受
284 軸受
290 弁ロータ
292 弁室
294 ロータの蓋
295 刃
296 ロータ窓
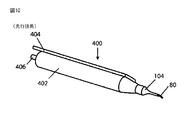
400 先行技術のハンドピース
402 ハンドピースの筐体
404 かん流管
406 吸引ラインコネクタ
500 手術用ハンドピース
502 ハンドピース筐体
504 かん流管
506 吸引管
508 かん流スリーブ
510 超音波水晶体切除プローブ
512 超音波アクチュエータ
514 超音波運動変換器
520 「管内」弁部分
522 ハンドピース軸管
523 循環空間
524 シャフトシール
525 シャフトシールカバー
526 シャフトシール本体
527 Oリング
528 バイパスチャネル
530 流体返却ポート
600 手術用ハンドピース
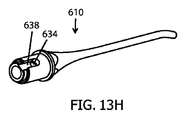
610 部分弁部分および2つの流体通路を有する手術用プローブ
634 流体通路
638 流出チャネル
710 部分弁部分および1つの流体通路を有する手術用プローブ
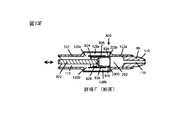
800 振動駆動サイクル式流量調整ハンドピース
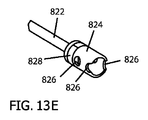
820 振動「管内」弁部分
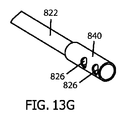
822 振動シャフト
824 「管内」弁実施形態用のピストン
826 ピストン窓
828 ピストンリング
840 「プローブ内」弁実施形態用のピストン
910 完全弁部分および1つの流体通路を有する手術用プローブ
922 シャフト遠位機能
924 手術用プローブロータ
926 ロータシャフト一致機能
928 ロータ窓
930 ばね
932 ロータ保持狭窄
950 弁および組織断片化機能を有する手術用プローブ
952 拍車状構造
954 内部組織断片化機能を有する弁ロータ
956 ロータ内の組織断片化リブ
970 流量調整器システムを有するかん流−吸引ハンドピース
972 吸引プローブ
974 I/Aハンドピース遠位筐体
976 I/Aハンドピース近位筐体
978 吸引ポート
Claims (10)
- 手術用プローブの吸引開口部を通した流体および組織断片の外科的吸引の間、体腔の閉塞後の不安定性を防止するためのサイクル式アパーチャ流量調整器システムであって、
a)調節可能な断面積を有する流体アパーチャを有する流量調整弁部分であって、前記流体アパーチャは、前記手術用プローブの前記吸引開口部を真空源と接続する流体経路内に配置される、流量調整弁部分と、
b)前記流体アパーチャの前記断面積を変更するように動作可能な前記流量調整弁部分と接続されたアクチュエータ部分と、
c)前記流体アパーチャの前記断面積の変化のサイクルをもたらすように、前記アクチュエータ部分にサイクルコマンド信号を提供するコントローラであって、前記サイクルのそれぞれは、前記流体アパーチャの前記断面積が実質的に低減または前記流体アパーチャが閉鎖される少なくとも1つのセグメントを含み、前記サイクルは、前記手術用プローブの前記吸引開口部において実質的に一定である流量を生成するのに十分高い周波数で生じる、コントローラとを備え、前記流体および組織断片は、前記手術用プローブの前記吸引開口部の閉塞の解消により引き起こされる前記流体経路への流体サージにより引き起こされる、前記体腔の不安定性が発生することなく、前記流体経路に沿って前記手術用プローブを使用して前記体腔から吸引され、
前記流量調整弁部分は、弁室内で回転しかつ摺動可能に軸方向に変位可能であるように構成された弁ロータを備えており、
前記流量調整弁部分は、調節可能な断面積を有する前記流体アパーチャを画成し、前記流体アパーチャは前記手術用プローブの前記吸引開口部を真空源に接続する通路に配置されており、前記流量調整弁部分は、前記流体アパーチャを画成するロータ蓋を備えており、前記弁ロータは、前記流体アパーチャの断面積を変化させるように回転中に前記弁室内を軸方向に移動させられる、サイクル式アパーチャ流量調整器システム。 - 前記体腔は、眼の内部である、請求項1に記載のサイクル式アパーチャ流量調整器システム。
- 前記サイクル中の前記流体アパーチャの前記断面積のRMS値は、操作者により調節可能である、請求項1に記載のサイクル式アパーチャ流量調整器システム。
- 前記弁ロータは、少なくとも1つの流体通路の入口が、前記サイクルのそれぞれのセグメントが流量を制限している間実質的に消失するように、前記弁室内の前記少なくとも1つの流体通路の前記入口上で回転および軸方向に変位するように操作可能である、請求項1に記載のサイクル式アパーチャ流量調整器システム。
- 前記流量調整弁部分は、手術用ハンドピースの吸引処理に組み込まれる、請求項1に記載のサイクル式アパーチャ流量調整器システム。
- 部分的に組み立てられる前記流量調整弁部分は、手術用プローブにより提供され、手術用ハンドピースにより提供される移動部材により操作される構造を有する、請求項1に記載のサイクル式アパーチャ流量調整器システム。
- 前記流量調整弁部分は、手術用プローブ内に組み込まれ、手術用ハンドピースにより提供される移動部材により操作される、請求項1に記載のサイクル式アパーチャ流量調整器システム。
- 前記アクチュエータ部分は、シャフトを用いて前記流量調整弁部分に機械的に接続された、回転式アクチュエータ、直線アクチュエータ、回転−直線複合アクチュエータ、回転モータ、ボイスコイルアクチュエータ、圧電アクチュエータおよび空気圧式アクチュエータからなる群から選択される少なくとも1つのアクチュエータを含む、請求項1に記載のサイクル式アパーチャ流量調整器システム。
- 前記アクチュエータ部分は、前記コントローラにアクチュエータ部分シャフトの位置フィードバック信号を提供するように配置される、回転式位置センサおよび直線位置センサからなる群から選択される位置センサをさらに含む、請求項1に記載のサイクル式アパーチャ流量調整器システム。
- 前記流量調整弁部分は、前記流体経路を通した組織断片クリアランスを向上させるための組織断片化手段をさらに含む、請求項1に記載のサイクル式アパーチャ流量調整器システム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361897827P | 2013-10-31 | 2013-10-31 | |
| US61/897,827 | 2013-10-31 | ||
| PCT/IB2014/062252 WO2014195927A1 (en) | 2013-06-04 | 2014-06-16 | Cyclic aperture flow regulator system |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016523130A JP2016523130A (ja) | 2016-08-08 |
| JP2016523130A5 JP2016523130A5 (ja) | 2017-07-20 |
| JP6574170B2 true JP6574170B2 (ja) | 2019-09-11 |
Family
ID=54545563
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016517736A Active JP6574170B2 (ja) | 2013-10-31 | 2014-06-16 | サイクル式アパーチャ流量調整器システム |
Country Status (5)
| Country | Link |
|---|---|
| EP (1) | EP3007660B1 (ja) |
| JP (1) | JP6574170B2 (ja) |
| CN (1) | CN105407843B (ja) |
| CA (1) | CA2911581A1 (ja) |
| ES (1) | ES2627261T3 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NL2019887B1 (en) * | 2017-11-10 | 2019-05-17 | Crea Ip B V | Method and system for active irrigation of an ophthalmic surgical site |
| CN108309416B (zh) * | 2018-02-05 | 2023-11-03 | 威海市妇幼保健院(威海市立第二医院、威海市妇女儿童医院) | 一种胎头吸引器 |
| US11712505B2 (en) * | 2018-09-24 | 2023-08-01 | Stryker Corporation | Systems and methods for improving control responsiveness during aspiration |
| US20210361481A1 (en) * | 2020-05-21 | 2021-11-25 | Johnson & Johnson Surgical Vision, Inc. | Phacoemulsification probe comprising magnetic sensors and/or multiple independent piezoelectric vibrators |
| CN112494202B (zh) * | 2020-11-26 | 2022-07-05 | 王小东 | 一种穿透性角膜移植术中眼后节压力调节装置 |
| CN113841590B (zh) * | 2021-10-27 | 2023-03-31 | 三峡大学 | 一种外置贴片式变流道抗堵滴灌带及抗堵滴灌方法 |
| CN115252114B (zh) * | 2022-07-25 | 2023-08-25 | 邦士医疗科技股份有限公司 | 一种鼻甲止血电极 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5106367A (en) * | 1989-11-28 | 1992-04-21 | Alexander Ureche | Eye surgery apparatus with vacuum surge suppressor |
| US5569188A (en) * | 1995-04-11 | 1996-10-29 | Mackool; Richard J. | Apparatus for controlling fluid flow through a surgical instrument and the temperature of an ultrasonic instrument |
| JP2000185092A (ja) * | 1998-12-24 | 2000-07-04 | Nidek Co Ltd | 灌流吸引装置 |
| US7217257B2 (en) * | 2002-09-30 | 2007-05-15 | Bausch & Lomb Incorporated | Aspiration flow resistor |
| GB2427142B (en) * | 2005-06-13 | 2010-10-20 | Single Use Surgical Ltd | Multi lumen suction irrigator |
| US20080125695A1 (en) * | 2006-06-23 | 2008-05-29 | Hopkins Mark A | Reflux control in microsurgical system |
| US7819837B2 (en) * | 2008-12-11 | 2010-10-26 | Bausch & Lomb Incorporated | Device for controlling flow rate of aspirated fluids |
| US9561129B2 (en) * | 2009-01-07 | 2017-02-07 | Rodney L. Ross | Tissue removal devices, systems and methods |
| US9370611B2 (en) * | 2009-01-07 | 2016-06-21 | Med-Logics, Inc. | Tissue removal devices, systems and methods |
| US20100191177A1 (en) * | 2009-01-23 | 2010-07-29 | Iscience Interventional Corporation | Device for aspirating fluids |
-
2014
- 2014-06-16 CN CN201480031932.0A patent/CN105407843B/zh not_active Expired - Fee Related
- 2014-06-16 ES ES14736991.2T patent/ES2627261T3/es active Active
- 2014-06-16 EP EP14736991.2A patent/EP3007660B1/en active Active
- 2014-06-16 CA CA2911581A patent/CA2911581A1/en not_active Abandoned
- 2014-06-16 JP JP2016517736A patent/JP6574170B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP3007660A1 (en) | 2016-04-20 |
| ES2627261T3 (es) | 2017-07-27 |
| JP2016523130A (ja) | 2016-08-08 |
| CN105407843A (zh) | 2016-03-16 |
| CA2911581A1 (en) | 2014-12-11 |
| EP3007660B1 (en) | 2017-05-03 |
| CN105407843B (zh) | 2018-11-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10398595B2 (en) | Cyclic aperture flow regulator system | |
| JP6574170B2 (ja) | サイクル式アパーチャ流量調整器システム | |
| AU2019201617B2 (en) | Selectively moveable valve elements for aspiration and irrigation circuits | |
| AU2006201902B2 (en) | Surge-flow regulator for use in ophthalmic surgical aspiration | |
| CA2602436C (en) | The application of vacuum as a method and mechanism for controlling eye chamber stability | |
| JP5400063B2 (ja) | 水晶体吸引術吸引装置用の吸引制御 | |
| US5562612A (en) | Apparatus and method for reverse flow irrigation and aspiration of interior regions of the human eye | |
| AU2001288949A1 (en) | Surge-flow regulator for use in ophthalmic surgical aspiration | |
| MX2008009560A (es) | Instrumento microquirurgico. | |
| JP2015500698A5 (ja) | ||
| MX2012006880A (es) | Pieza manual para facoemulsificacion con bomba de aspiracion integrada y cartucho. | |
| US20210186756A1 (en) | Surgical instruments for ocular surgery | |
| RU2773370C2 (ru) | Селективно перемещаемые клапаны для контуров аспирации и ирригации | |
| Vejarano et al. | Fluidics in bimanual phaco |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170605 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170605 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180605 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180810 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181120 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190213 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190716 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190815 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6574170 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |