JP6545280B2 - 摩擦発電機 - Google Patents
摩擦発電機 Download PDFInfo
- Publication number
- JP6545280B2 JP6545280B2 JP2017550849A JP2017550849A JP6545280B2 JP 6545280 B2 JP6545280 B2 JP 6545280B2 JP 2017550849 A JP2017550849 A JP 2017550849A JP 2017550849 A JP2017550849 A JP 2017550849A JP 6545280 B2 JP6545280 B2 JP 6545280B2
- Authority
- JP
- Japan
- Prior art keywords
- charge
- contact
- generator
- mode
- state
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000004044 response Effects 0.000 claims description 29
- 230000007246 mechanism Effects 0.000 claims description 27
- 230000033001 locomotion Effects 0.000 claims description 22
- 238000000034 method Methods 0.000 claims description 21
- 238000010248 power generation Methods 0.000 claims description 17
- 230000008859 change Effects 0.000 claims description 7
- 230000000630 rising effect Effects 0.000 claims description 3
- 239000010410 layer Substances 0.000 description 12
- 230000001276 controlling effect Effects 0.000 description 11
- 238000006243 chemical reaction Methods 0.000 description 10
- 239000000463 material Substances 0.000 description 10
- 239000000126 substance Substances 0.000 description 10
- 230000006698 induction Effects 0.000 description 9
- 230000007423 decrease Effects 0.000 description 8
- 230000000694 effects Effects 0.000 description 8
- 230000000670 limiting effect Effects 0.000 description 8
- 238000000926 separation method Methods 0.000 description 8
- 230000001960 triggered effect Effects 0.000 description 8
- 238000010586 diagram Methods 0.000 description 7
- 230000001965 increasing effect Effects 0.000 description 7
- 230000006870 function Effects 0.000 description 6
- 238000003306 harvesting Methods 0.000 description 6
- 230000000737 periodic effect Effects 0.000 description 6
- 230000002829 reductive effect Effects 0.000 description 6
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 6
- 230000001419 dependent effect Effects 0.000 description 5
- 238000006073 displacement reaction Methods 0.000 description 5
- 238000000059 patterning Methods 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 238000005516 engineering process Methods 0.000 description 4
- 230000003068 static effect Effects 0.000 description 4
- 238000012546 transfer Methods 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 230000008021 deposition Effects 0.000 description 3
- 230000005611 electricity Effects 0.000 description 3
- 230000000977 initiatory effect Effects 0.000 description 3
- 238000012544 monitoring process Methods 0.000 description 3
- 229920001343 polytetrafluoroethylene Polymers 0.000 description 3
- 239000004810 polytetrafluoroethylene Substances 0.000 description 3
- 239000004812 Fluorinated ethylene propylene Substances 0.000 description 2
- 230000004913 activation Effects 0.000 description 2
- 229910052782 aluminium Inorganic materials 0.000 description 2
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 2
- 238000002485 combustion reaction Methods 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 229920001746 electroactive polymer Polymers 0.000 description 2
- 239000012530 fluid Substances 0.000 description 2
- 239000000446 fuel Substances 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 229920009441 perflouroethylene propylene Polymers 0.000 description 2
- 239000012781 shape memory material Substances 0.000 description 2
- 238000012876 topography Methods 0.000 description 2
- 206010065929 Cardiovascular insufficiency Diseases 0.000 description 1
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 238000005299 abrasion Methods 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 230000005684 electric field Effects 0.000 description 1
- 230000002708 enhancing effect Effects 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- HQQADJVZYDDRJT-UHFFFAOYSA-N ethene;prop-1-ene Chemical group C=C.CC=C HQQADJVZYDDRJT-UHFFFAOYSA-N 0.000 description 1
- 230000003203 everyday effect Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 239000012212 insulator Substances 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 238000005339 levitation Methods 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- -1 polytetrafluoroethylene Polymers 0.000 description 1
- 230000036316 preload Effects 0.000 description 1
- 238000005086 pumping Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 238000007790 scraping Methods 0.000 description 1
- 239000002356 single layer Substances 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images




Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N1/00—Electrostatic generators or motors using a solid moving electrostatic charge carrier
- H02N1/04—Friction generators
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N1/00—Electrostatic generators or motors using a solid moving electrostatic charge carrier
- H02N1/002—Electrostatic motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N1/00—Electrostatic generators or motors using a solid moving electrostatic charge carrier
- H02N1/06—Influence generators
- H02N1/10—Influence generators with non-conductive charge carrier
Landscapes
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
- Control Of Eletrric Generators (AREA)
- Generation Of Surge Voltage And Current (AREA)
Description

Claims (15)
- 電力を生成するための発電機であって、前記発電機は充電状態を有する第1の素子及び第2の素子を備え、前記第1の素子及び前記第2の素子が前記充電状態を含むときに電力を生成するために前記第1の素子及び前記第2の素子が互いに対して移動可能であり、前記第1の素子及び前記第2の素子が互いに接触及び接触解除されるように構成される、発電機と、
前記第1の素子及び前記第2の素子を接触及び接触解除させるための駆動機構と、を備えるシステムであって、
前記システムは、
前記第1の素子及び前記第2の素子が、前記充電状態を変更するために接触する充電モードと、前記第1の素子及び前記第2の素子が接触解除されている発電モードとで動作される、システムにおいて、
前記システムは、
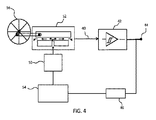
前記充電状態を判断するためのデバイスと、
コントローラと、をさらに備え、
前記コントローラが、
前記充電状態に応じて前記充電モードのタイミング及び/若しくは期間を制御するか、又は
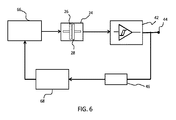
前記充電状態に応じて前記充電モードのタイミング及び/若しくは期間を制御する際に使用する情報を出力することを特徴とする、システム。 - 前記充電状態を判断するための前記デバイスが、前記発電機の出力信号を受信するための比較回路を備える、請求項1に記載のシステム。
- 前記比較回路が、シュミットトリガ回路を備える、請求項2に記載のシステム。
- 前記第1の素子及び前記第2の素子が、互いに対して回転可能な第1のディスク素子及び第2のディスク素子を備える、請求項1乃至3のいずれか一項に記載のシステム。
- 前記第1の素子及び前記第2の素子が、前記発電モードで特定の値に固定される移動距離で、互いに対して移動可能である、請求項1乃至4のいずれか一項に記載のシステム。
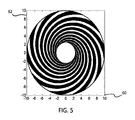
- 前記駆動機構が、前記第1のディスク素子及び/又は前記第2のディスク素子の表面上に形成される、1つ又は複数の螺旋状パターントポグラフィ特徴を備え、前記螺旋状パターントポグラフィ特徴が、回転に応じて前記第1の素子と前記第2の素子との間の距離を生成する、請求項4に記載のシステム。
- 前記第1の素子と前記第2の素子との間の相対運動を発生させるためのモータユニットをさらに備える、請求項1乃至6のいずれか一項に記載のシステム。
- 前記コントローラが、前記モータユニットへの駆動入力電圧を制御するため、前記モータユニットに接続されたモータコントローラ回路を備える、請求項7に記載のシステム。
- 前記駆動機構が、メカトロニクス作動素子を備える、請求項1乃至8のいずれか一項に記載のシステム。
- 前記コントローラが、メカトロニクス作動制御回路を備える、請求項9に記載のシステム。
- 前記コントローラが、ユーザからのコマンドを受信するためのユーザ入力モジュールを備える、請求項1乃至10のいずれか一項に記載のシステム。
- 前記コントローラが、前記充電モードの前記タイミング及び/又は前記期間を手動で制御する際に使用する情報をユーザに出力するためのユーザ出力モジュールを備える、請求項11に記載のシステム。
- 電力を生成するための発電機を動作させる方法であって、前記発電機が第1の素子及び第2の素子を備え、前記第1の素子及び前記第2の素子が、充電状態を有し、前記電力を生成するために互いに対して移動可能であり、前記第1の素子及び前記第2の素子が、互いに接触及び接触解除されるように構成され、前記方法は、
前記充電状態を変更するために前記第1の素子及び前記第2の素子が接触する充電モードと、前記第1の素子及び前記第2の素子が接触解除する非充電モードとを実現するように、前記第1の素子及び前記第2の素子を接触及び接触解除させるステップを含む、方法において、
前記方法はまた、
前記充電状態を判断するステップと、
前記充電状態に応じて前記充電のタイミング及び/若しくは期間を制御するステップか、又は、代替的に、
前記充電状態に応じて前記充電モードのタイミング及び/若しくは期間を制御する際に使用する情報を出力するステップと、を含むことを特徴とする、方法。 - 前記第1の素子及び前記第2の素子は、前記発電機の出力電圧が下側閾値より上から前記下側閾値より下に低下することに応答して接触され、前記第1の素子及び前記第2の素子が、前記発電機の出力電圧が上側閾値より下から前記上側閾値より上に上昇することに応答して接触解除される、請求項13に記載の方法。
- 前記第1の素子及び前記第2の素子が、メカトロニクス制御素子によって接触及び/又は接触解除される、請求項13又は14に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP15161948 | 2015-03-31 | ||
| EP15161948.3 | 2015-03-31 | ||
| PCT/EP2016/056493 WO2016156180A1 (en) | 2015-03-31 | 2016-03-24 | Triboelectric energy generator |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018510608A JP2018510608A (ja) | 2018-04-12 |
| JP2018510608A5 JP2018510608A5 (ja) | 2019-03-28 |
| JP6545280B2 true JP6545280B2 (ja) | 2019-07-17 |
Family
ID=52807675
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017550849A Active JP6545280B2 (ja) | 2015-03-31 | 2016-03-24 | 摩擦発電機 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US10855205B2 (ja) |
| EP (1) | EP3278443B1 (ja) |
| JP (1) | JP6545280B2 (ja) |
| CN (1) | CN107431446B (ja) |
| RU (1) | RU2686682C1 (ja) |
| TR (1) | TR201900407T4 (ja) |
| WO (1) | WO2016156180A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI803192B (zh) * | 2021-11-03 | 2023-05-21 | 中山大學 | 一種摩擦-電磁複合型發電裝置及其性能測試平臺和方法 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2563942B (en) * | 2017-06-30 | 2022-01-12 | Zapgo Ltd | Triboelectric charge harvesting device |
| CN109194183B (zh) * | 2018-08-20 | 2020-02-04 | 南方科技大学 | 器件自修复系统 |
| FR3092950B1 (fr) | 2019-02-19 | 2023-05-19 | Inst Mines Telecom | Générateur triboélectrique |
| CN109946200B (zh) * | 2019-03-15 | 2024-05-10 | 中国地质大学(武汉) | 一种基于纳米材料的接触分离式煤层气两相流气泡传感器 |
| US12091313B2 (en) | 2019-08-26 | 2024-09-17 | The Research Foundation For The State University Of New York | Electrodynamically levitated actuator |
| CN113030505B (zh) * | 2021-02-26 | 2022-12-16 | 北京纳米能源与系统研究所 | 一种摩擦电式旋转传感器及监测系统 |
| CN114542365B (zh) * | 2022-02-21 | 2023-12-12 | 北京纳米能源与系统研究所 | 深海能源收集装置及系统 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SU1452427A1 (ru) * | 1986-05-05 | 1994-12-30 | П.А. Вертинский | Электростатический двигатель |
| RU2216095C1 (ru) * | 2002-09-30 | 2003-11-10 | Журбин Валерий Владимирович | Способ генерирования электрической энергии высокого напряжения |
| RU2241300C2 (ru) * | 2003-02-12 | 2004-11-27 | Южно-Российский государственный технический университет (Новочеркасский политехнический институт) | Электростатическая емкостная машина для преобразования энергии ветрового потока |
| US7842174B2 (en) * | 2006-06-12 | 2010-11-30 | Utah State University | Electrochemical chip with miniaturized sensor array |
| CN102939705B (zh) * | 2010-04-16 | 2017-03-22 | 德雷加勒拉控股有限公司 | 用作电动机或发电机的设备 |
| US9190936B2 (en) * | 2010-07-16 | 2015-11-17 | Panasonic Corporation | Micro-electromechanical generator and electric apparatus using same |
| JP6074939B2 (ja) * | 2012-07-27 | 2017-02-08 | ソニー株式会社 | 発電機 |
| US9985554B2 (en) * | 2013-03-01 | 2018-05-29 | Georgia Tech Research Corporation | Triboelectric nanogenerator |
| US9484842B2 (en) | 2013-03-01 | 2016-11-01 | Georgia Tech Research Corporation | Segmentally structured disk triboelectric nanogenerator |
| CN103795288B (zh) * | 2013-04-19 | 2016-03-16 | 北京纳米能源与系统研究所 | 一种转动式静电发电装置 |
| CN103780136B (zh) * | 2013-10-24 | 2016-08-17 | 北京纳米能源与系统研究所 | 一种输出恒定电流的旋转摩擦发电机 |
| CN103825489B (zh) * | 2014-02-27 | 2016-05-04 | 北京纳米能源与系统研究所 | 旋转摩擦发电机、稳压输出电路和供电装置 |
| CN203933440U (zh) | 2014-04-22 | 2014-11-05 | 国家纳米科学中心 | 一种便携式静电感应发电装置 |
-
2016
- 2016-03-24 WO PCT/EP2016/056493 patent/WO2016156180A1/en active Application Filing
- 2016-03-24 RU RU2017133749A patent/RU2686682C1/ru active
- 2016-03-24 CN CN201680020091.2A patent/CN107431446B/zh active Active
- 2016-03-24 TR TR2019/00407T patent/TR201900407T4/tr unknown
- 2016-03-24 JP JP2017550849A patent/JP6545280B2/ja active Active
- 2016-03-24 EP EP16712820.6A patent/EP3278443B1/en active Active
- 2016-03-24 US US15/562,924 patent/US10855205B2/en active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI803192B (zh) * | 2021-11-03 | 2023-05-21 | 中山大學 | 一種摩擦-電磁複合型發電裝置及其性能測試平臺和方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018510608A (ja) | 2018-04-12 |
| CN107431446B (zh) | 2019-12-17 |
| WO2016156180A1 (en) | 2016-10-06 |
| BR112017020738A2 (pt) | 2018-06-26 |
| US10855205B2 (en) | 2020-12-01 |
| TR201900407T4 (tr) | 2019-02-21 |
| CN107431446A (zh) | 2017-12-01 |
| US20180091064A1 (en) | 2018-03-29 |
| RU2686682C1 (ru) | 2019-04-30 |
| EP3278443B1 (en) | 2018-10-31 |
| EP3278443A1 (en) | 2018-02-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6545280B2 (ja) | 摩擦発電機 | |
| JP6898922B2 (ja) | エネルギ変換システム及び方法 | |
| US10734921B2 (en) | Energy generation system and method | |
| Yang et al. | Integrated flywheel and spiral spring triboelectric nanogenerator for improving energy harvesting of intermittent excitations/triggering | |
| JP6340701B2 (ja) | アクチュエータ | |
| CN108476002B (zh) | 电力生成或者转换系统 | |
| US20200358372A1 (en) | Energy generation system and method | |
| BR112017020738B1 (pt) | Sistema, e, método para operação de um gerador de energia elétrica | |
| JP6581294B2 (ja) | 電力発生デバイス及び電力発生方法 | |
| KR101334005B1 (ko) | 전자기력 선형 액추에이터를 이용한 가변형 오일 펌프 | |
| Ra et al. | Hidden Regulator-Based Physically Intelligent Rotational Triboelectric Nanogenerator with Real-Time Tracing of Optimal Working Condition |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190218 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190218 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20190218 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20190425 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190521 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190618 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6545280 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |