JP6543716B2 - 適応型成分間残差予測 - Google Patents
適応型成分間残差予測 Download PDFInfo
- Publication number
- JP6543716B2 JP6543716B2 JP2017538385A JP2017538385A JP6543716B2 JP 6543716 B2 JP6543716 B2 JP 6543716B2 JP 2017538385 A JP2017538385 A JP 2017538385A JP 2017538385 A JP2017538385 A JP 2017538385A JP 6543716 B2 JP6543716 B2 JP 6543716B2
- Authority
- JP
- Japan
- Prior art keywords
- color component
- linear model
- parameters
- residual signal
- target color
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000003044 adaptive effect Effects 0.000 title description 11
- 239000013074 reference sample Substances 0.000 claims description 128
- 238000000034 method Methods 0.000 claims description 108
- 230000006870 function Effects 0.000 claims description 49
- 241000023320 Luma <angiosperm> Species 0.000 claims description 39
- OSWPMRLSEDHDFF-UHFFFAOYSA-N methyl salicylate Chemical compound COC(=O)C1=CC=CC=C1O OSWPMRLSEDHDFF-UHFFFAOYSA-N 0.000 claims description 39
- 239000000523 sample Substances 0.000 claims description 38
- 238000003860 storage Methods 0.000 claims description 34
- 230000002123 temporal effect Effects 0.000 claims description 23
- 238000013459 approach Methods 0.000 description 63
- 239000013598 vector Substances 0.000 description 31
- 238000013139 quantization Methods 0.000 description 25
- 238000012545 processing Methods 0.000 description 20
- 238000004891 communication Methods 0.000 description 15
- 208000037170 Delayed Emergence from Anesthesia Diseases 0.000 description 13
- 230000008569 process Effects 0.000 description 12
- 230000006835 compression Effects 0.000 description 10
- 238000007906 compression Methods 0.000 description 10
- 230000005540 biological transmission Effects 0.000 description 9
- 238000000638 solvent extraction Methods 0.000 description 8
- 238000006243 chemical reaction Methods 0.000 description 7
- 238000013500 data storage Methods 0.000 description 6
- 238000009795 derivation Methods 0.000 description 6
- 238000010586 diagram Methods 0.000 description 5
- 238000005192 partition Methods 0.000 description 5
- 238000004458 analytical method Methods 0.000 description 4
- 230000008901 benefit Effects 0.000 description 4
- 238000005457 optimization Methods 0.000 description 4
- 239000003086 colorant Substances 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 230000011664 signaling Effects 0.000 description 3
- 230000009466 transformation Effects 0.000 description 3
- 230000000007 visual effect Effects 0.000 description 3
- 239000000969 carrier Substances 0.000 description 2
- 238000004590 computer program Methods 0.000 description 2
- 239000000835 fiber Substances 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 238000005070 sampling Methods 0.000 description 2
- 230000011218 segmentation Effects 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 241001502919 Gambusia luma Species 0.000 description 1
- 239000004288 Sodium dehydroacetate Substances 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 230000001413 cellular effect Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 238000012432 intermediate storage Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000000844 transformation Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images








Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/105—Selection of the reference unit for prediction within a chosen coding or prediction mode, e.g. adaptive choice of position and number of pixels used for prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/186—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being a colour or a chrominance component
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/46—Embedding additional information in the video signal during the compression process
- H04N19/463—Embedding additional information in the video signal during the compression process by compressing encoding parameters before transmission
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/593—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving spatial prediction techniques
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
- Color Television Systems (AREA)
- Compression, Expansion, Code Conversion, And Decoders (AREA)
- Facsimile Image Signal Circuits (AREA)
- Color Image Communication Systems (AREA)
Description
predC(i,j)=α・recL(i,j)+β (3)
ただし、predC(i,j)は、ブロック中のクロマサンプルの予測を表し、recL(i,j)は、同じブロックのダウンサンプリングされた再構成されたルーマサンプルを表す。パラメータαおよびβは、現在ブロックの周囲の隣接する再構成されたルーマサンプルとクロマサンプルとの間の回帰誤差を最小化することによって導出される。

ただし、xiは、ダウンサンプリングされた再構成されたルーマ参照サンプルであり、yiは、再構成されたクロマ参照サンプルであり、Nは、参照サンプルの数である。
成分間残差予測では、線形モデルが、空間的または時間的に隣接する再構成されたサンプルに基づいて解かれるとき、線形モデルパラメータ値は、参照サンプルの雑音/量子化誤差のために、または、現在ブロックサンプルと参照サンプルとの間の相違点のために、準最適であり得る。成分間残差予測の性能を向上させるために、いくつかの例では、αがデフォルト値に近くなることが期待されるという制約を、最適化問題が受けるように、制約が含まれる。同様に、αが何らかの他のデフォルト値に近くなることが期待されるという制約を、最適化問題が受けるように、制約が含まれ得る。いくつかの例示的な手法では、αの計算を1つまたは複数の制約にバイアスさせることによって、ビデオエンコーダ20は、成分間残差予測の性能を向上させる。
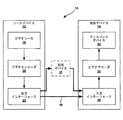
12 ソースデバイス
14 宛先デバイス
16 リンク
18 ビデオソース
20 ビデオエンコーダ、エンコーダ
22 出力インターフェース
28 入力インターフェース
30 ビデオデコーダ、デコーダ
31 記憶デバイス
32 ディスプレイデバイス
38、68 ビデオデータメモリ
40 予測処理ユニット
42 動き推定ユニット
44、72 動き補償ユニット
46、74 イントラ予測ユニット
48 区分ユニット
50、62、80 加算器
52 変換処理ユニット
54 量子化ユニット
56 エントロピー符号化ユニット
58、76 逆量子化ユニット
60、78 逆変換ユニット
64、82 参照ピクチャメモリ
70 エントロピー復号ユニット
71 予測ユニット
Claims (68)
- ビデオデータを符号化する方法であって、
エンコーダ内で、前記ビデオデータの現在ブロックのソース色成分の残差信号に基づいて、前記現在ブロックのターゲット色成分の予測残差信号を決定するために線形モデルを使用するステップであって、前記線形モデルが1つまたは複数のパラメータに基づく、ステップと、
前記エンコーダ内で、前記ターゲット色成分の残差信号と、前記ターゲット色成分の前記予測残差信号とに基づいて、前記ターゲット色成分のための残りの残差信号を決定するステップと、
前記ターゲット色成分の前記残りの残差信号の値を符号化するステップと、
ビデオビットストリーム中で前記符号化された残りの残差信号値を出力するステップと
を含み、
前記予測残差信号を決定することは、前記線形モデルの前記1つまたは複数のパラメータを決定するステップを含み、前記線形モデルの前記1つまたは複数のパラメータを決定するステップが、
予測誤差を、参照ターゲット色成分の参照サンプル値と、参照ソース色成分の参照サンプル値との関数として決定するステップと、
前記予測誤差を最小化する、前記線形モデルの前記1つまたは複数のパラメータの値を選択するステップであって、あらかじめ定義されたパラメータ値に近くなるように、線形モデルパラメータを制約することによって、前記線形モデルの前記1つまたは複数のパラメータのうちの線形モデルパラメータを導出するステップを含む、ステップと、
を含み、
前記参照ターゲット色成分の前記参照サンプル値、および前記参照ソース色成分の前記参照サンプル値が、再構成された空間隣接サンプルの、それぞれ第1の色成分および第2の色成分である、方法。 - ビデオデータを符号化する方法であって、
エンコーダ内で、前記ビデオデータの現在ブロックのソース色成分の残差信号に基づいて、前記現在ブロックのターゲット色成分の予測残差信号を決定するために線形モデルを使用するステップであって、前記線形モデルが1つまたは複数のパラメータに基づく、ステップと、
前記エンコーダ内で、前記ターゲット色成分の残差信号と、前記ターゲット色成分の前記予測残差信号とに基づいて、前記ターゲット色成分のための残りの残差信号を決定するステップと、
前記ターゲット色成分の前記残りの残差信号の値を符号化するステップと、
ビデオビットストリーム中で前記符号化された残りの残差信号値を出力するステップと
を含み、
前記予測残差信号を決定することは、前記線形モデルの前記1つまたは複数のパラメータを決定するステップを含み、
前記線形モデルの前記1つまたは複数のパラメータを決定するステップが、予測誤差を最小化する、前記線形モデルの前記1つまたは複数のパラメータの値を選択するステップであって、前記予測誤差が、参照ターゲット色成分の参照サンプル値と、参照ソース色成分の参照サンプル値との関数であり、E(α,β)を最小化する重み付け係数αとオフセットβとを導出するステップを含み、ただし、
前記参照ターゲット色成分の前記参照サンプル値、および前記参照ソース色成分の前記参照サンプル値が、再構成された空間隣接サンプルの、それぞれ第1の色成分および第2の色成分である、方法。 - 前記線形モデルの前記1つまたは複数のパラメータに対応するデフォルトパラメータ値を取り出すステップを含む、請求項1または2に記載の方法。
- 前記線形モデルの前記1つまたは複数のパラメータが、重み付け係数とオフセットとを含み、前記線形モデルが、前記ソース色成分の色成分タイプによって定義され、前記線形モデルの前記1つまたは複数のパラメータに対応するデフォルトパラメータ値を取り出すステップが、第1のソース色成分の前記色成分タイプに基づいて、前記ターゲット色成分の前記予測残差信号を決定するために前記線形モデルを使用するとき、第1のデフォルトパラメータ値を取り出すステップと、第2のソース色成分の前記色成分タイプに基づいて、前記ターゲット色成分の前記予測残差信号を決定するために前記線形モデルを使用するとき、第2のデフォルトパラメータ値を取り出すステップとを含む、請求項3に記載の方法。
- 前記線形モデルの前記1つまたは複数のパラメータが、重み付け係数とオフセットとを含み、前記線形モデルが、前記ソース色成分の色成分タイプによって定義され、1つの色成分タイプがルーマであり、もう1つの色成分タイプがクロマであり、前記ソース色成分が、ルーマ色成分タイプまたは第1のクロマ色成分タイプのうちの1つであり、前記ターゲット色成分が、第2のクロマ色成分タイプであり、
前記線形モデルの前記1つまたは複数のパラメータに対応するデフォルトパラメータ値を取り出すステップが、
ルーマ色成分の残差信号を使用して、第1のクロマ色成分の残差信号を予測するとき、第1のデフォルト重み付け係数を取り出すステップと、
第2のクロマ色成分の残差信号を使用して、前記第1のクロマ色成分の前記残差信号を予測するとき、前記第1のデフォルト重み付け係数とは異なる第2のデフォルト重み付け係数を取り出すステップと
を含む、請求項3に記載の方法。 - 前記第2のデフォルト重み付け係数が-0.5である、請求項5に記載の方法。
- 前記線形モデルの前記1つまたは複数のパラメータの値を選択するステップが、E(α,β)を最小化する重み付け係数αとオフセットβとを選択するステップを含み、ただし、
- 前記線形モデルの前記1つまたは複数のパラメータの値を選択するステップが、E(α)を最小化する重み付け係数αを選択するステップを含み、ただし、
- 前記線形モデルの前記1つまたは複数のパラメータの値を選択するステップが、E(β)を最小化するオフセットβを選択するステップを含み、ただし、
- 前記線形モデルの前記1つまたは複数のパラメータの値を選択するステップが、前記ターゲット色成分の色成分タイプと、前記ソース色成分の色成分タイプとに基づいて、あらかじめ定義されたパラメータ値を選択するステップと、前記選択されたあらかじめ定義されたパラメータ値に近くなるように、線形モデルパラメータを制約することによって、前記線形モデルの前記1つまたは複数のパラメータのうちの線形モデルパラメータを導出するステップとを含む、請求項1または2に記載の方法。
- 前記線形モデルの前記1つまたは複数のパラメータの値を選択するステップが、前記線形モデルの前記1つまたは複数のパラメータのうちの線形モデルパラメータを導出するステップを含み、線形モデルパラメータを導出するステップが、あらかじめ定義されたパラメータ値に近くなるように、前記線形モデルパラメータを制約するステップと、前記線形モデルパラメータと、1つまたは複数の時間または空間隣接ブロックの線形モデルパラメータとの間の変動を制限するステップとを含む、請求項1または2に記載の方法。
- 前記線形モデルの前記1つまたは複数のパラメータの値を選択するステップが、
前記ソース色成分が第1の色成分タイプであるかどうかを決定するステップと、
前記ソース色成分が前記第1の色成分タイプであるとき、あらかじめ定義されたパラメータ値に近くなるように、線形モデルパラメータを制約することによって、前記線形モデルの前記1つまたは複数のパラメータのうちの前記線形モデルパラメータを導出するステップと
を含む、請求項1または2に記載の方法。 - 前記線形モデルパラメータを導出するステップが、前記あらかじめ定義されたパラメータ値を、前記線形モデルパラメータで置き換えるステップを含む、請求項1に記載の方法。
- 前記線形モデルパラメータを導出するステップが、ブロックサイズが、あらかじめ定義されたしきい値ブロックサイズよりも大きい場合、前記あらかじめ定義されたパラメータ値を、前記線形モデルパラメータで置き換えるステップを含む、請求項1に記載の方法。
- 前記参照ターゲット色成分および前記参照ソース色成分が、現在のブロックの時間隣接またはコロケートされた参照ブロックの、それぞれ第1の色成分および第2の色成分である、請求項1または2に記載の方法。
- 前記参照ターゲット色成分の前記参照サンプル値、および前記参照ソース色成分の前記参照サンプル値が、現在のブロックの時間隣接またはコロケートされた参照ブロックの、それぞれ第1の色成分および第2の色成分に対応する残差信号である、請求項1または2に記載の方法。
- 前記参照ターゲット色成分の前記参照サンプル値、および前記参照ソース色成分の前記参照サンプル値が、現在のブロックの、それぞれ第1の色成分および第2の色成分に対応する空間隣接サンプル値および時間隣接サンプル値を含む、請求項1または2に記載の方法。
- 前記参照ターゲット色成分および前記参照ソース色成分が、現在のブロックの空間隣接サンプルおよび時間隣接サンプルを含む、複数のサンプルから選択され、前記選択されるサンプルが、現在ブロックまたは隣接ブロックに関連付けられた統計量の関数として選択される、請求項1または2に記載の方法。
- 前記線形モデルの1つまたは複数のパラメータを決定するステップをさらに含み、前記線形モデルの1つまたは複数のパラメータを決定するステップが、
予測誤差を、参照ターゲット色成分のダウンサンプリングまたはサブサンプリングされた参照サンプル値と、参照ソース色成分のダウンサンプリングまたはサブサンプリングされた参照サンプル値との関数として決定するステップと、
前記予測誤差を最小化する、前記線形モデルの前記1つまたは複数のパラメータの値を選択するステップと
を含む、請求項1または2に記載の方法。 - 前記参照ターゲット色成分および前記参照ソース色成分が、現在のブロックの空間隣接サンプルおよび時間隣接サンプルを含む、複数のサンプルから選択され、ダウンサンプリングが、ダウンサンプリング比によって定義され、時間隣接サンプルのために使用される前記ダウンサンプリング比が、空間隣接サンプルのために使用される前記ダウンサンプリング比とは異なる、請求項19に記載の方法。
- 前記参照ターゲット色成分および前記参照ソース色成分が、現在のブロックの空間隣接サンプルおよび時間隣接サンプルを含む、複数のサンプルから選択され、サブサンプリングが、サブサンプリング比によって定義され、時間隣接サンプルのために使用される前記サブサンプリング比が、空間隣接サンプルのために使用される前記サブサンプリング比とは異なる、請求項19に記載の方法。
- ビデオデータを符号化するためのデバイスであって、
前記ビデオデータを記憶するように構成されたメモリと、
1つまたは複数のプロセッサとを備え、前記1つまたは複数のプロセッサが、
前記ビデオデータの現在ブロックのソース色成分の残差信号に基づいて、前記現在ブロックのターゲット色成分の予測残差信号を決定するために線形モデルを使用することであって、前記線形モデルが1つまたは複数のパラメータに基づく、ことと、
前記ターゲット色成分の残差信号と、前記ターゲット色成分の前記予測残差信号とに基づいて、前記ターゲット色成分のための残りの残差信号を決定すること、
前記ターゲット色成分の前記残りの残差信号の値を符号化すること、および
ビデオビットストリーム中で前記符号化された残りの残差信号値を出力すること
を行うように構成され、
前記予測残差信号を決定することは、前記線形モデルの前記1つまたは複数のパラメータを決定することを含み、前記線形モデルの前記1つまたは複数のパラメータを決定することが、
予測誤差を、参照ターゲット色成分の参照サンプル値と、参照ソース色成分の参照サンプル値との関数として決定することと、
前記予測誤差を最小化する、前記線形モデルの前記1つまたは複数のパラメータの値を選択することであって、あらかじめ定義されたパラメータ値に近くなるように、線形モデルパラメータを制約することによって、前記線形モデルの前記1つまたは複数のパラメータのうちの線形モデルパラメータを導出することを含む、ことと、
を含み、
前記参照ターゲット色成分の前記参照サンプル値、および前記参照ソース色成分の前記参照サンプル値が、再構成された空間隣接サンプルの、それぞれ第1の色成分および第2の色成分である、デバイス。 - ビデオデータを符号化するためのデバイスであって、
前記ビデオデータを記憶するように構成されたメモリと、
1つまたは複数のプロセッサとを備え、前記1つまたは複数のプロセッサが、
前記ビデオデータの現在ブロックのソース色成分の残差信号に基づいて、前記現在ブロックのターゲット色成分の予測残差信号を決定するために線形モデルを使用することであって、前記線形モデルが1つまたは複数のパラメータに基づく、ことと、
前記ターゲット色成分の残差信号と、前記ターゲット色成分の前記予測残差信号とに基づいて、前記ターゲット色成分のための残りの残差信号を決定すること、
前記ターゲット色成分の前記残りの残差信号の値を符号化すること、および
ビデオビットストリーム中で前記符号化された残りの残差信号値を出力すること
を行うように構成され、
前記予測残差信号を決定することは、前記線形モデルの前記1つまたは複数のパラメータを決定することを含み、
前記線形モデルの前記1つまたは複数のパラメータを決定することが、予測誤差を最小化する、前記線形モデルの前記1つまたは複数のパラメータの値を選択することであって、前記予測誤差が、参照ターゲット色成分の参照サンプル値と、参照ソース色成分の参照サンプル値との関数であり、E(α,β)を最小化する重み付け係数αとオフセットβとを導出するステップを含み、ただし、
前記参照ターゲット色成分の前記参照サンプル値、および前記参照ソース色成分の前記参照サンプル値が、再構成された空間隣接サンプルの、それぞれ第1の色成分および第2の色成分である、デバイス。 - 前記線形モデルの前記1つまたは複数のパラメータの値を選択することが、E(α,β)を最小化する重み付け係数αとオフセットβとを選択することを含み、ただし、
- 前記線形モデルの前記1つまたは複数のパラメータの値を選択することが、E(α)を最小化する重み付け係数αを選択することを含み、ただし、
- 前記線形モデルの前記1つまたは複数のパラメータの値を選択することが、E(β)を最小化するオフセットβを選択することを含み、ただし、
- 前記線形モデルの前記1つまたは複数のパラメータの値を選択することが、前記ターゲット色成分の色成分タイプと、前記ソース色成分の色成分タイプとに基づいて、あらかじめ定義されたパラメータ値を選択すること、および、前記選択されたあらかじめ定義されたパラメータ値に近くなるように、線形モデルパラメータを制約することによって、前記線形モデルの前記1つまたは複数のパラメータのうちの線形モデルパラメータを導出することを含む、請求項22または23に記載のデバイス。
- 前記線形モデルの前記1つまたは複数のパラメータの値を選択することが、前記線形モデルの前記1つまたは複数のパラメータのうちの線形モデルパラメータを導出することを含み、線形モデルパラメータを導出することが、あらかじめ定義されたパラメータ値に近くなるように、前記線形モデルパラメータを制約すること、および、前記線形モデルパラメータと、1つまたは複数の時間または空間隣接ブロックの線形モデルパラメータとの間の変動を制限することを含む、請求項22または23に記載のデバイス。
- 前記線形モデルの前記1つまたは複数のパラメータの値を選択することが、
前記ソース色成分が第1の色成分タイプのものであるかどうかを決定すること、および
前記ソース色成分が前記第1の色成分タイプであるとき、あらかじめ定義されたパラメータ値に近くなるように、線形モデルパラメータを制約することによって、前記線形モデルの前記1つまたは複数のパラメータのうちの線形モデルパラメータを導出すること
を含む、請求項22または23に記載のデバイス。 - 前記線形モデルパラメータを導出することが、前記あらかじめ定義されたパラメータ値を、前記線形モデルパラメータで置き換えることを含む、請求項22に記載のデバイス。
- 前記線形モデルパラメータを導出することが、ブロックサイズが、あらかじめ定義されたしきい値ブロックサイズよりも大きい場合、前記あらかじめ定義されたパラメータ値を、前記線形モデルパラメータで置き換えることを含む、請求項22に記載のデバイス。
- ビデオデータを符号化するためのデバイスであって、
エンコーダ内で、前記ビデオデータの現在ブロックのソース色成分の残差信号に基づいて、前記現在ブロックのターゲット色成分の予測残差信号を決定するために線形モデルを使用するための手段であって、前記線形モデルが1つまたは複数のパラメータに基づく、手段と、
前記エンコーダ内で、前記ターゲット色成分の残差信号と、前記ターゲット色成分の前記予測残差信号とに基づいて、前記ターゲット色成分のための残りの残差信号を決定するための手段と、
前記ターゲット色成分の前記残りの残差信号の値を符号化するための手段と、
ビデオビットストリーム中で前記符号化された残りの残差信号値を出力するための手段と
を備え、
予測残差信号を決定するために線形モデルを使用するための前記手段は、前記線形モデルの前記1つまたは複数のパラメータを決定するための手段を含み、前記線形モデルの前記1つまたは複数のパラメータを決定するための手段が、
予測誤差を、参照ターゲット色成分の参照サンプル値と、参照ソース色成分の参照サンプル値との関数として決定するための手段と、
前記予測誤差を最小化する、前記線形モデルの前記1つまたは複数のパラメータの値を選択するための手段であって、あらかじめ定義されたパラメータ値に近くなるように、線形モデルパラメータを制約することによって、前記線形モデルの前記1つまたは複数のパラメータのうちの線形モデルパラメータを導出するための手段を含む、手段と、
を含み、
前記参照ターゲット色成分の前記参照サンプル値、および前記参照ソース色成分の前記参照サンプル値が、再構成された空間隣接サンプルの、それぞれ第1の色成分および第2の色成分である、デバイス。 - ビデオデータを符号化するためのデバイスであって、
エンコーダ内で、前記ビデオデータの現在ブロックのソース色成分の残差信号に基づいて、前記現在ブロックのターゲット色成分の予測残差信号を決定するために線形モデルを使用するための手段であって、前記線形モデルが1つまたは複数のパラメータに基づく、手段と、
前記エンコーダ内で、前記ターゲット色成分の残差信号と、前記ターゲット色成分の前記予測残差信号とに基づいて、前記ターゲット色成分のための残りの残差信号を決定するための手段と、
前記ターゲット色成分の前記残りの残差信号の値を符号化するための手段と、
ビデオビットストリーム中で前記符号化された残りの残差信号値を出力するための手段と
を備え、
予測残差信号を決定するために線形モデルを使用するための前記手段は、前記線形モデルの前記1つまたは複数のパラメータを決定するための手段を含み、
前記線形モデルの前記1つまたは複数のパラメータを決定するための手段が、予測誤差を最小化する、前記線形モデルの前記1つまたは複数のパラメータの値を選択するための手段であって、前記予測誤差が、参照ターゲット色成分の参照サンプル値と、参照ソース色成分の参照サンプル値との関数であり、E(α,β)を最小化する重み付け係数αとオフセットβとを導出するための手段を含み、ただし、
前記参照ターゲット色成分の前記参照サンプル値、および前記参照ソース色成分の前記参照サンプル値が、再構成された空間隣接サンプルの、それぞれ第1の色成分および第2の色成分である、デバイス。 - 前記線形モデルの前記1つまたは複数のパラメータの値を選択するための前記手段が、E(α,β)を最小化する重み付け係数αとオフセットβとを導出するための手段を含み、ただし、
- 命令を記憶したコンピュータ可読記憶媒体であって、前記命令が、実行されると、ビデオデータを符号化するためのデバイスの1つまたは複数のプロセッサに、
前記ビデオデータの現在ブロックのソース色成分の残差信号に基づいて、前記現在ブロックのターゲット色成分の予測残差信号を決定するために線形モデルを使用することであって、前記線形モデルが1つまたは複数のパラメータに基づく、ことと、
前記ターゲット色成分の残差信号と、前記ターゲット色成分の前記予測残差信号とに基づいて、前記ターゲット色成分のための残りの残差信号を決定すること、
前記ターゲット色成分の前記残りの残差信号の値を符号化すること、および
ビデオビットストリーム中で前記符号化された残りの残差信号値を出力すること
を行わせ、
予測残差信号を決定することが、前記線形モデルの1つまたは複数のパラメータを決定することを含み、前記線形モデルの1つまたは複数のパラメータを決定することが、
予測誤差を、参照ターゲット色成分の参照サンプル値と、参照ソース色成分の参照サンプル値との関数として決定すること、および
前記予測誤差を最小化する、前記線形モデルの前記1つまたは複数のパラメータの値を選択することであって、あらかじめ定義されたパラメータ値に近くなるように、線形モデルパラメータを制約することによって、前記線形モデルの前記1つまたは複数のパラメータのうちの線形モデルパラメータを導出することを含む、こと
を含み、
前記参照ターゲット色成分の前記参照サンプル値、および前記参照ソース色成分の前記参照サンプル値が、再構成された空間隣接サンプルの、それぞれ第1の色成分および第2の色成分である、コンピュータ可読記憶媒体。 - 命令を記憶したコンピュータ可読記憶媒体であって、前記命令が、実行されると、ビデオデータを符号化するためのデバイスの1つまたは複数のプロセッサに、
前記ビデオデータの現在ブロックのソース色成分の残差信号に基づいて、前記現在ブロックのターゲット色成分の予測残差信号を決定するために線形モデルを使用することであって、前記線形モデルが1つまたは複数のパラメータに基づく、ことと、
前記ターゲット色成分の残差信号と、前記ターゲット色成分の前記予測残差信号とに基づいて、前記ターゲット色成分のための残りの残差信号を決定すること、
前記ターゲット色成分の前記残りの残差信号の値を符号化すること、および
ビデオビットストリーム中で前記符号化された残りの残差信号値を出力すること
を行わせ、
予測残差信号を決定することが、前記線形モデルの1つまたは複数のパラメータを決定することを含み、前記線形モデルの1つまたは複数のパラメータを決定することが、前記1つまたは複数のプロセッサに予測誤差を最小化する、前記線形モデルの前記1つまたは複数のパラメータの値を選択することであって、前記予測誤差が、参照ターゲット色成分の参照サンプル値と、参照ソース色成分の参照サンプル値との関数であり、E(α,β)を最小化する重み付け係数αとオフセットβとを導出することを含み、ただし、
前記参照ターゲット色成分の前記参照サンプル値、および前記参照ソース色成分の前記参照サンプル値が、再構成された空間隣接サンプルの、それぞれ第1の色成分および第2の色成分である、コンピュータ可読記憶媒体。 - ビデオデータを復号する方法であって、
前記ビデオデータの現在ブロックのソース色成分の残差信号に基づいて、前記現在ブロックのターゲット色成分の予測残差信号を決定するために線形モデルを使用するステップであって、前記線形モデルが1つまたは複数のパラメータに基づく、ステップと、
前記ターゲット色成分の残差信号を、前記ターゲット色成分の復号された残りの残差信号と、前記ターゲット色成分の前記予測残差信号とに基づいて決定するステップと、
前記ターゲット色成分の前記残差信号に基づいて、前記現在ブロックのサンプルを再構成するステップと
を含み、
前記予測残差信号を決定することが、前記線形モデルの1つまたは複数のパラメータを決定するステップを含み、前記線形モデルの1つまたは複数のパラメータを決定するステップが、
予測誤差を、参照ターゲット色成分の参照サンプル値と、参照ソース色成分の参照サンプル値との関数として決定するステップと、
前記予測誤差を最小化する、前記線形モデルの前記1つまたは複数のパラメータの値を選択するステップであって、あらかじめ定義されたパラメータ値に近くなるように、線形モデルパラメータを制約することによって、前記線形モデルの前記1つまたは複数のパラメータのうちの線形モデルパラメータを導出するステップを含む、ステップと、
を含み、
前記参照ターゲット色成分の前記参照サンプル値、および前記参照ソース色成分の前記参照サンプル値が、再構成された空間隣接サンプルの、それぞれ第1の色成分および第2の色成分である、方法。 - ビデオデータを復号する方法であって、
前記ビデオデータの現在ブロックのソース色成分の残差信号に基づいて、前記現在ブロックのターゲット色成分の予測残差信号を決定するために線形モデルを使用するステップであって、前記線形モデルが1つまたは複数のパラメータに基づく、ステップと、
前記ターゲット色成分の残差信号を、前記ターゲット色成分の復号された残りの残差信号と、前記ターゲット色成分の前記予測残差信号とに基づいて決定するステップと、
前記ターゲット色成分の前記残差信号に基づいて、前記現在ブロックのサンプルを再構成するステップと
を含み、
前記予測残差信号を決定することが、前記線形モデルの1つまたは複数のパラメータを決定するステップを含み、
前記線形モデルの1つまたは複数のパラメータを決定するステップが、予測誤差を最小化する、前記線形モデルの前記1つまたは複数のパラメータの値を選択するステップであって、前記予測誤差が、参照ターゲット色成分の参照サンプル値と、参照ソース色成分の参照サンプル値との関数であり、E(α,β)を最小化する重み付け係数αとオフセットβとを導出するステップを含み、ただし、
前記参照ターゲット色成分の前記参照サンプル値、および前記参照ソース色成分の前記参照サンプル値が、再構成された空間隣接サンプルの、それぞれ第1の色成分および第2の色成分である、方法。 - ビデオビットストリームを受信するステップと、前記ターゲット色成分の前記残りの残差信号と、前記ソース色成分の前記残差信号とを表すデータを、メモリ中に記憶するステップとをさらに含む、請求項37または38に記載の方法。
- 前記線形モデルの前記1つまたは複数のパラメータに対応するデフォルトパラメータ値を取り出すステップをさらに含む、請求項37または38に記載の方法。
- 前記線形モデルの前記1つまたは複数のパラメータが、重み付け係数とオフセットとを含み、前記線形モデルが前記ソース色成分の色成分タイプによって定義され、前記線形モデルの前記1つまたは複数のパラメータに対応するデフォルトパラメータ値を取り出すステップが、第1のソース色成分の前記色成分タイプに基づいて、前記ターゲット色成分の前記予測残差信号を決定するために前記線形モデルを使用するとき、第1のデフォルトパラメータ値を取り出すステップと、第2のソース色成分の前記色成分タイプに基づいて、前記ターゲット色成分の前記予測残差信号を決定するために前記線形モデルを使用するとき、第2のデフォルトパラメータ値を取り出すステップとを含む、請求項40に記載の方法。
- 前記線形モデルの前記1つまたは複数のパラメータが、重み付け係数とオフセットとを含み、前記線形モデルが前記ソース色成分の色成分タイプによって定義され、1つの色成分タイプがルーマであり、もう1つの色成分タイプがクロマであり、前記ソース色成分が、ルーマ色成分タイプおよびクロマ色成分タイプのうちの1つであり、前記ターゲット色成分が、クロマ色成分タイプであり、
前記線形モデルの前記1つまたは複数のパラメータに対応するデフォルトパラメータ値を取り出すステップが、
ルーマ色成分の残差信号を使用して、第1のクロマ色成分の残差信号を予測するとき、第1のデフォルト重み付け係数を取り出すステップと、
第2のクロマ色成分の残差信号を使用して、前記第1のクロマ色成分の残差信号を予測するとき、前記第1のデフォルト重み付け係数とは異なる第2のデフォルト重み付け係数を取り出すステップと
を含む、請求項40に記載の方法。 - 前記第2のデフォルト重み付け係数が-0.5である、請求項42に記載の方法。
- 前記線形モデルの前記1つまたは複数のパラメータの値を選択するステップが、E(α,β)を最小化する重み付け係数αとオフセットβとを選択するステップを含み、ただし、
- 前記線形モデルの前記1つまたは複数のパラメータの値を選択するステップが、E(α)を最小化する重み付け係数αを選択するステップを含み、ただし、
- 前記線形モデルの前記1つまたは複数のパラメータの値を選択するステップが、E(β)を最小化するオフセットβを選択するステップを含み、ただし、
- 前記線形モデルの前記1つまたは複数のパラメータの値を選択するステップが、前記ターゲット色成分の色成分タイプと、前記ソース色成分の色成分タイプとに基づいて、あらかじめ定義されたパラメータ値を選択するステップと、前記選択されたあらかじめ定義されたパラメータ値に近くなるように、線形モデルパラメータを制約することによって、前記線形モデルの前記1つまたは複数のパラメータのうちの線形モデルパラメータを導出するステップとを含む、請求項37または38に記載の方法。
- 前記線形モデルの前記1つまたは複数のパラメータの値を選択するステップが、前記線形モデルの前記1つまたは複数のパラメータのうちの線形モデルパラメータを導出するステップを含み、線形モデルパラメータを導出するステップが、あらかじめ定義されたパラメータ値に近くなるように、前記線形モデルパラメータを制約するステップと、前記線形モデルパラメータと、1つまたは複数の時間または空間隣接ブロックの線形モデルパラメータとの間の変動を制限するステップとを含む、請求項37または38に記載の方法。
- 前記線形モデルの前記1つまたは複数のパラメータの値を選択するステップが、
前記ソース色成分が第1の色成分タイプであるかどうかを決定するステップと、
前記ソース色成分が前記第1の色成分タイプであるとき、あらかじめ定義されたパラメータ値に近くなるように、線形モデルパラメータを制約することによって、前記線形モデルの前記1つまたは複数のパラメータのうちの線形モデルパラメータを導出するステップと
を含む、請求項37または38に記載の方法。 - 前記線形モデルパラメータを導出するステップが、前記あらかじめ定義されたパラメータ値を、前記線形モデルパラメータで置き換えるステップを含む、請求項37に記載の方法。
- 前記線形モデルパラメータを導出するステップが、ブロックサイズが、あらかじめ定義されたしきい値ブロックサイズよりも大きい場合、前記あらかじめ定義されたパラメータ値を、前記線形モデルパラメータで置き換えるステップを含む、請求項37に記載の方法。
- 前記参照ターゲット色成分および前記参照ソース色成分が、現在のブロックの時間隣接またはコロケートされた参照ブロックの、それぞれ第1の色成分および第2の色成分である、請求項37または38に記載の方法。
- 前記参照ターゲット色成分の前記参照サンプル値、および前記参照ソース色成分の前記参照サンプル値が、現在のブロックの時間隣接またはコロケートされた参照ブロックの、それぞれ第1の色成分および第2の色成分に対応する残差信号である、請求項37または38に記載の方法。
- 前記参照ターゲット色成分の前記参照サンプル値、および前記参照ソース色成分の前記参照サンプル値が、現在のブロックの、それぞれ第1の色成分および第2の色成分に対応する空間隣接サンプル値および時間隣接サンプル値を含む、請求項37または38に記載の方法。
- 前記参照ターゲット色成分および前記参照ソース色成分が、現在のブロックの空間隣接サンプルおよび時間隣接サンプルを含む、複数のサンプルから選択され、前記選択されるサンプルが、現在ブロックまたは隣接ブロックに関連付けられた統計量の関数として選択される、請求項37または38に記載の方法。
- 前記線形モデルの1つまたは複数のパラメータを決定するステップをさらに含み、前記線形モデルの1つまたは複数のパラメータを決定するステップが、
予測誤差を、参照ターゲット色成分のダウンサンプリングまたはサブサンプリングされた参照サンプル値と、参照ソース色成分のダウンサンプリングまたはサブサンプリングされた参照サンプル値との関数として決定するステップと、
前記予測誤差を最小化する、前記線形モデルの前記1つまたは複数のパラメータの値を選択するステップと
を含む、請求項37または38に記載の方法。 - 前記参照ターゲット色成分および前記参照ソース色成分が、現在のブロックの空間隣接サンプルおよび時間隣接サンプルを含む、複数のサンプルから選択され、ダウンサンプリングが、ダウンサンプリング比によって定義され、時間隣接サンプルのために使用される前記ダウンサンプリング比が、空間隣接サンプルのために使用される前記ダウンサンプリング比とは異なる、請求項56に記載の方法。
- 前記参照ターゲット色成分および前記参照ソース色成分が、現在のブロックの空間隣接サンプルおよび時間隣接サンプルを含む、複数のサンプルから選択され、サブサンプリングが、サブサンプリング比によって定義され、時間隣接サンプルのために使用される前記サブサンプリング比が、空間隣接サンプルのために使用される前記サブサンプリング比とは異なる、請求項56に記載の方法。
- ビデオデータを復号するためのデバイスであって、
前記ビデオデータを記憶するように構成されたメモリと、
1つまたは複数のプロセッサとを備え、前記1つまたは複数のプロセッサが、
前記ビデオデータの現在ブロックのソース色成分の残差信号に基づいて、前記現在ブロックのターゲット色成分の予測残差信号を決定するために線形モデルを使用することであって、前記線形モデルが1つまたは複数のパラメータに基づく、ことと、
前記ターゲット色成分の残差信号を、前記ターゲット色成分の復号された残りの残差信号と、前記ターゲット色成分の前記予測残差信号との関数として決定することと、
前記ターゲット色成分の前記残差信号に基づいて、前記現在ブロックのサンプルを再構成することと
を行うように構成され、
前記予測残差信号を決定することが、前記線形モデルの1つまたは複数のパラメータを決定することを含み、前記線形モデルの1つまたは複数のパラメータを決定することが、
予測誤差を、参照ターゲット色成分の参照サンプル値と、参照ソース色成分の参照サンプル値との関数として決定することと、
前記予測誤差を最小化する、前記線形モデルの前記1つまたは複数のパラメータの値を選択することであって、あらかじめ定義されたパラメータ値に近くなるように、線形モデルパラメータを制約することによって、前記線形モデルの前記1つまたは複数のパラメータのうちの線形モデルパラメータを導出することを含む、ことと、
を含み、
前記参照ターゲット色成分の前記参照サンプル値、および前記参照ソース色成分の前記参照サンプル値が、再構成された空間隣接サンプルの、それぞれ第1の色成分および第2の色成分である、デバイス。 - ビデオデータを復号するためのデバイスであって、
前記ビデオデータを記憶するように構成されたメモリと、
1つまたは複数のプロセッサとを備え、前記1つまたは複数のプロセッサが、
前記ビデオデータの現在ブロックのソース色成分の残差信号に基づいて、前記現在ブロックのターゲット色成分の予測残差信号を決定するために線形モデルを使用することであって、前記線形モデルが1つまたは複数のパラメータに基づく、ことと、
前記ターゲット色成分の残差信号を、前記ターゲット色成分の復号された残りの残差信号と、前記ターゲット色成分の前記予測残差信号との関数として決定することと、
前記ターゲット色成分の前記残差信号に基づいて、前記現在ブロックのサンプルを再構成することと
を行うように構成され、
前記予測残差信号を決定することが、前記線形モデルの1つまたは複数のパラメータを決定することを含み、
前記線形モデルの1つまたは複数のパラメータを決定することが、予測誤差を最小化する、前記線形モデルの前記1つまたは複数のパラメータの値を選択することであって、前記予測誤差が、参照ターゲット色成分の参照サンプル値と、参照ソース色成分の参照サンプル値との関数であり、E(α,β)を最小化する重み付け係数αとオフセットβとを導出することを含み、ただし、
前記参照ターゲット色成分の前記参照サンプル値、および前記参照ソース色成分の前記参照サンプル値が、再構成された空間隣接サンプルの、それぞれ第1の色成分および第2の色成分である、デバイス。 - 前記線形モデルの前記1つまたは複数のパラメータの値を選択することが、E(α,β)を最小化する重み付け係数αとオフセットβとを選択することを含み、ただし、
- 前記線形モデルの前記1つまたは複数のパラメータの値を選択することが、E(α)を最小化する重み付け係数αを選択することを含み、ただし、
- 前記線形モデルの前記1つまたは複数のパラメータの値を選択することが、E(β)を最小化するオフセットβを選択することを含み、ただし、
- ビデオデータを復号するためのデバイスであって、
前記ビデオデータの現在ブロックのソース色成分の残差信号に基づいて、前記現在ブロックのターゲット色成分の予測残差信号を決定するために線形モデルを使用するための手段であって、前記線形モデルが1つまたは複数のパラメータに基づく、手段と、
前記ターゲット色成分の残差信号を、前記ターゲット色成分の復号された残りの残差信号と、前記ターゲット色成分の前記予測残差信号とに基づいて決定するための手段と、
前記ターゲット色成分の前記残差信号に基づいて、前記現在ブロックのサンプルを再構成するための手段と
を備え、
予測残差信号を決定するために線形モデルを使用するための手段が、前記線形モデルの1つまたは複数のパラメータを決定するための手段を含み、前記線形モデルの1つまたは複数のパラメータを決定するための手段が、
予測誤差を、参照ターゲット色成分の参照サンプル値と、参照ソース色成分の参照サンプル値との関数として決定するための手段と、
前記予測誤差を最小化する、前記線形モデルの前記1つまたは複数のパラメータの値を選択するための手段であって、あらかじめ定義されたパラメータ値に近くなるように、線形モデルパラメータを制約することによって、前記線形モデルの前記1つまたは複数のパラメータのうちの線形モデルパラメータを導出するための手段を含む、手段とを含み、
前記参照ターゲット色成分の前記参照サンプル値、および前記参照ソース色成分の前記参照サンプル値が、再構成された空間隣接サンプルの、それぞれ第1の色成分および第2の色成分である、デバイス。 - ビデオデータを復号するためのデバイスであって、
前記ビデオデータの現在ブロックのソース色成分の残差信号に基づいて、前記現在ブロックのターゲット色成分の予測残差信号を決定するために線形モデルを使用するための手段であって、前記線形モデルが1つまたは複数のパラメータに基づく、手段と、
前記ターゲット色成分の残差信号を、前記ターゲット色成分の復号された残りの残差信号と、前記ターゲット色成分の前記予測残差信号とに基づいて決定するための手段と、
前記ターゲット色成分の前記残差信号に基づいて、前記現在ブロックのサンプルを再構成するための手段と
を備え、
予測残差信号を決定するために線形モデルを使用するための手段が、前記線形モデルの1つまたは複数のパラメータを決定するための手段を含み、
前記線形モデルの1つまたは複数のパラメータを決定するための手段が、予測誤差を最小化する、前記線形モデルの前記1つまたは複数のパラメータの値を選択するための手段であって、前記予測誤差を、参照ターゲット色成分の参照サンプル値と、参照ソース色成分の参照サンプル値との関数であり、E(α,β)を最小化する重み付け係数αとオフセットβとを導出するための手段を含み、ただし、
前記参照ターゲット色成分の前記参照サンプル値、および前記参照ソース色成分の前記参照サンプル値が、再構成された空間隣接サンプルの、それぞれ第1の色成分および第2の色成分である、デバイス。 - 命令を記憶したコンピュータ可読記憶媒体であって、前記命令が、実行されると、ビデオデータを復号するためのデバイスの1つまたは複数のプロセッサに、
前記ビデオデータの現在ブロックのソース色成分の残差信号に基づいて、前記現在ブロックのターゲット色成分の予測残差信号を決定するために線形モデルを使用することであって、前記線形モデルが1つまたは複数のパラメータに基づく、ことと、
前記ターゲット色成分の残差信号を、前記ターゲット色成分の復号された残りの残差信号と、前記ターゲット色成分の前記予測残差信号とに基づいて決定することと、
前記ターゲット色成分の前記残差信号に基づいて、前記現在ブロックのサンプルを再構成することと
を行わせ、
前記予測残差信号を決定することが、前記線形モデルの1つまたは複数のパラメータを決定することを含み、前記線形モデルの1つまたは複数のパラメータを決定することが、
予測誤差を、参照ターゲット色成分の参照サンプル値と、参照ソース色成分の参照サンプル値との関数として決定することと、
前記予測誤差を最小化する、前記線形モデルの前記1つまたは複数のパラメータの値を選択することであって、あらかじめ定義されたパラメータ値に近くなるように、線形モデルパラメータを制約することによって、前記線形モデルの前記1つまたは複数のパラメータのうちの線形モデルパラメータを導出することを含む、ことと、
を含み、
前記参照ターゲット色成分の前記参照サンプル値、および前記参照ソース色成分の前記参照サンプル値が、再構成された空間隣接サンプルの、それぞれ第1の色成分および第2の色成分である、コンピュータ可読記憶媒体。 - 命令を記憶したコンピュータ可読記憶媒体であって、前記命令が、実行されると、ビデオデータを復号するためのデバイスの1つまたは複数のプロセッサに、
前記ビデオデータの現在ブロックのソース色成分の残差信号に基づいて、前記現在ブロックのターゲット色成分の予測残差信号を決定するために線形モデルを使用することであって、前記線形モデルが1つまたは複数のパラメータに基づく、ことと、
前記ターゲット色成分の残差信号を、前記ターゲット色成分の復号された残りの残差信号と、前記ターゲット色成分の前記予測残差信号とに基づいて決定することと、
前記ターゲット色成分の前記残差信号に基づいて、前記現在ブロックのサンプルを再構成することと
を行わせ、
前記予測残差信号を決定することが、前記線形モデルの1つまたは複数のパラメータを決定することを含み、
前記線形モデルの1つまたは複数のパラメータを決定することが、予測誤差を最小化する、前記線形モデルの前記1つまたは複数のパラメータの値を選択することであって、前記予測誤差を、参照ターゲット色成分の参照サンプル値と、参照ソース色成分の参照サンプル値との関数であり、E(α,β)を最小化する重み付け係数αとオフセットβとを導出することを含み、ただし、
前記参照ターゲット色成分の前記参照サンプル値、および前記参照ソース色成分の前記参照サンプル値が、再構成された空間隣接サンプルの、それぞれ第1の色成分および第2の色成分である、コンピュータ可読記憶媒体。 - 前記線形モデルの前記1つまたは複数のパラメータの値を選択することが、E(α,β)を最小化する重み付け係数αとオフセットβとを選択することを含み、ただし、
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562108491P | 2015-01-27 | 2015-01-27 | |
| US62/108,491 | 2015-01-27 | ||
| US15/006,994 US9998742B2 (en) | 2015-01-27 | 2016-01-26 | Adaptive cross component residual prediction |
| US15/006,994 | 2016-01-26 | ||
| PCT/US2016/015129 WO2016123219A1 (en) | 2015-01-27 | 2016-01-27 | Adaptive cross component residual prediction |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018509035A JP2018509035A (ja) | 2018-03-29 |
| JP2018509035A5 JP2018509035A5 (ja) | 2018-09-20 |
| JP6543716B2 true JP6543716B2 (ja) | 2019-07-10 |
Family
ID=56433529
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017538385A Active JP6543716B2 (ja) | 2015-01-27 | 2016-01-27 | 適応型成分間残差予測 |
Country Status (13)
| Country | Link |
|---|---|
| US (1) | US9998742B2 (ja) |
| EP (1) | EP3092803B1 (ja) |
| JP (1) | JP6543716B2 (ja) |
| KR (1) | KR102519241B1 (ja) |
| CN (1) | CN107211124B (ja) |
| BR (1) | BR112017016111A2 (ja) |
| CA (1) | CA2972501C (ja) |
| EA (1) | EA034473B1 (ja) |
| ES (1) | ES2715555T3 (ja) |
| HU (1) | HUE041885T2 (ja) |
| TN (1) | TN2017000284A1 (ja) |
| TW (1) | TWI705698B (ja) |
| WO (1) | WO2016123219A1 (ja) |
Families Citing this family (74)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10681379B2 (en) | 2015-09-29 | 2020-06-09 | Qualcomm Incorporated | Non-separable secondary transform for video coding with reorganizing |
| WO2017061189A1 (ja) * | 2015-10-05 | 2017-04-13 | シャープ株式会社 | 画像復号装置または画像符号化装置のための画像予測装置 |
| US10623774B2 (en) | 2016-03-22 | 2020-04-14 | Qualcomm Incorporated | Constrained block-level optimization and signaling for video coding tools |
| US20180014021A1 (en) * | 2016-07-05 | 2018-01-11 | Cisco Technology, Inc. | Prediction in image and video compression |
| US10419757B2 (en) * | 2016-08-31 | 2019-09-17 | Qualcomm Incorporated | Cross-component filter |
| US11095893B2 (en) | 2016-10-12 | 2021-08-17 | Qualcomm Incorporated | Primary transform and secondary transform in video coding |
| WO2018116925A1 (ja) * | 2016-12-21 | 2018-06-28 | シャープ株式会社 | イントラ予測画像生成装置、画像復号装置、および画像符号化装置 |
| JP6680260B2 (ja) * | 2017-04-28 | 2020-04-15 | 株式会社Jvcケンウッド | 画像符号化装置、画像符号化方法及び画像符号化プログラム、並びに画像復号化装置、画像復号化方法及び画像復号化プログラム |
| CN107580222B (zh) * | 2017-08-01 | 2020-02-14 | 北京交通大学 | 一种基于线性模型预测的图像或视频编码方法 |
| JP2021005741A (ja) * | 2017-09-14 | 2021-01-14 | シャープ株式会社 | 画像符号化装置及び画像復号装置 |
| WO2020053805A1 (en) | 2018-09-12 | 2020-03-19 | Beijing Bytedance Network Technology Co., Ltd. | Single-line cross component linear model prediction mode |
| WO2019135636A1 (ko) * | 2018-01-05 | 2019-07-11 | 에스케이텔레콤 주식회사 | Ycbcr간의 상관 관계를 이용한 영상 부호화/복호화 방법 및 장치 |
| KR20190083956A (ko) * | 2018-01-05 | 2019-07-15 | 에스케이텔레콤 주식회사 | YCbCr간의 상관 관계를 이용한 영상 부호화/복호화 방법 및 장치 |
| GB2571313B (en) | 2018-02-23 | 2022-09-21 | Canon Kk | New sample sets and new down-sampling schemes for linear component sample prediction |
| CN117528088A (zh) * | 2018-05-14 | 2024-02-06 | 英迪股份有限公司 | 对图像进行解码和编码的方法、非暂态计算机可读介质 |
| WO2019229683A1 (en) | 2018-05-31 | 2019-12-05 | Beijing Bytedance Network Technology Co., Ltd. | Concept of interweaved prediction |
| US20200007872A1 (en) * | 2018-06-29 | 2020-01-02 | Industrial Technology Research Institute | Video decoding method, video decoder, video encoding method and video encoder |
| CN110999290B (zh) * | 2018-07-15 | 2021-07-16 | 华为技术有限公司 | 使用跨分量线性模型进行帧内预测的方法和装置 |
| WO2020035837A1 (en) * | 2018-08-17 | 2020-02-20 | Beijing Bytedance Network Technology Co., Ltd. | Simplified cross component prediction |
| GB2577338A (en) * | 2018-09-24 | 2020-03-25 | Sony Corp | Data encoding and decoding |
| WO2020071617A1 (ko) * | 2018-10-04 | 2020-04-09 | 엘지전자 주식회사 | Cclm에 기반한 인트라 예측 방법 및 그 장치 |
| CN112970264A (zh) * | 2018-11-05 | 2021-06-15 | 交互数字Vc控股公司 | 基于相邻样本相关参数模型的译码模式的简化 |
| KR102653562B1 (ko) | 2018-11-06 | 2024-04-02 | 베이징 바이트댄스 네트워크 테크놀로지 컴퍼니, 리미티드 | 위치에 따른 인트라 예측 |
| AU2019383886B2 (en) * | 2018-11-23 | 2021-04-29 | Lg Electronics Inc. | Method for decoding image on basis of CCLM prediction in image coding system, and device therefor |
| CN118200544A (zh) | 2018-11-23 | 2024-06-14 | 英迪股份有限公司 | 图像解码方法、图像编码方法和传输图像的比特流的方法 |
| WO2020108591A1 (en) | 2018-12-01 | 2020-06-04 | Beijing Bytedance Network Technology Co., Ltd. | Parameter derivation for intra prediction |
| TWI734059B (zh) * | 2018-12-10 | 2021-07-21 | 財團法人工業技術研究院 | 動態預測模型建立方法、電子裝置及使用者介面 |
| CN112235577B (zh) * | 2018-12-13 | 2021-08-20 | 华为技术有限公司 | 色度块的预测方法和装置 |
| GB2580108A (en) * | 2018-12-21 | 2020-07-15 | Sony Corp | Image data encoding and decoding |
| GB2580106A (en) * | 2018-12-21 | 2020-07-15 | Sony Corp | Image data encoding and decoding |
| WO2020125795A1 (en) * | 2018-12-22 | 2020-06-25 | Beijing Bytedance Network Technology Co., Ltd. | Indication of two step cross-component prediction mode |
| JP7304153B2 (ja) * | 2018-12-27 | 2023-07-06 | Kddi株式会社 | 動画像復号装置、動画像復号方法及びプログラム |
| WO2020140948A1 (en) | 2019-01-02 | 2020-07-09 | Beijing Bytedance Network Technology Co., Ltd. | Motion vector derivation between dividing patterns |
| TWI675718B (zh) | 2019-01-03 | 2019-11-01 | 財團法人工業技術研究院 | 工具機的加工件負載特性判斷及加速度調整方法 |
| WO2020149630A1 (ko) * | 2019-01-15 | 2020-07-23 | 엘지전자 주식회사 | 영상 코딩 시스템에서 cclm 예측 기반 영상 디코딩 방법 및 그 장치 |
| EP3900362A4 (en) | 2019-02-01 | 2022-03-02 | Beijing Bytedance Network Technology Co., Ltd. | SIGNALING LOOP SHAPED INFORMATION USING PARAMETER SETS |
| PH12021551732A1 (en) | 2019-02-01 | 2022-07-25 | Bytedance Inc | Signaling of in-loop reshaping information using parameter sets |
| PH12021551828A1 (en) * | 2019-02-22 | 2022-04-11 | Beijing Bytedance Network Tech Co Ltd | Neighbouring sample selection for intra prediction |
| JP7203241B2 (ja) | 2019-03-08 | 2023-01-12 | 北京字節跳動網絡技術有限公司 | 映像処理における再整形情報の信号伝達 |
| US12114000B2 (en) | 2019-03-08 | 2024-10-08 | Qualcomm Incorporated | Combined residual coding in video coding |
| CN119135916A (zh) * | 2019-03-11 | 2024-12-13 | 上海天荷电子信息有限公司 | 多权重可减少分量数的分量间自预测视频压缩方法和装置 |
| CN111698501B (zh) * | 2019-03-11 | 2022-03-01 | 杭州海康威视数字技术股份有限公司 | 解码方法及装置 |
| CN117499644A (zh) | 2019-03-14 | 2024-02-02 | 北京字节跳动网络技术有限公司 | 环路整形信息的信令和语法 |
| KR102740307B1 (ko) * | 2019-03-23 | 2024-12-10 | 두인 비전 컴퍼니 리미티드 | 적응적 루프 필터링 파라미터 세트들에 대한 제한들 |
| CN113784128B (zh) * | 2019-03-25 | 2023-04-21 | Oppo广东移动通信有限公司 | 图像预测方法、编码器、解码器以及存储介质 |
| CN116634153A (zh) * | 2019-03-25 | 2023-08-22 | Oppo广东移动通信有限公司 | 图像预测方法、编码器、解码器以及存储介质 |
| CN113508584A (zh) * | 2019-03-25 | 2021-10-15 | Oppo广东移动通信有限公司 | 图像分量预测方法、编码器、解码器以及存储介质 |
| SG11202111000XA (en) | 2019-04-18 | 2021-11-29 | Beijing Bytedance Network Technology Co Ltd | Restriction on applicability of cross component mode |
| JP7317991B2 (ja) | 2019-04-23 | 2023-07-31 | 北京字節跳動網絡技術有限公司 | クロスコンポーネント依存性を低減するための方法 |
| KR102641796B1 (ko) | 2019-05-08 | 2024-03-04 | 베이징 바이트댄스 네트워크 테크놀로지 컴퍼니, 리미티드 | 교차-성분 코딩의 적용가능성에 대한 조건들 |
| CN117478908A (zh) | 2019-06-22 | 2024-01-30 | 北京字节跳动网络技术有限公司 | 色度残差缩放的语法元素 |
| CN117395396A (zh) | 2019-07-07 | 2024-01-12 | 北京字节跳动网络技术有限公司 | 色度残差缩放的信令通知 |
| EP3972251A4 (en) * | 2019-07-10 | 2022-08-24 | Guangdong Oppo Mobile Telecommunications Corp., Ltd. | IMAGE COMPONENT PREDICTION METHOD, ENCODER, DECODER AND MEMORY MEDIA |
| HUE066880T2 (hu) | 2019-08-23 | 2024-09-28 | Huawei Tech Co Ltd | Egy kódoló, egy dekódoló és megfelelõ eljárások a közös krominancia kódolást használó blokkok krominancia deblokkolásának elvégzésére |
| AU2020332002A1 (en) * | 2019-09-17 | 2022-04-07 | Huawei Technologies Co., Ltd. | Signaling subpicture IDS in subpicture based video coding |
| WO2021054380A1 (ja) * | 2019-09-20 | 2021-03-25 | 日本放送協会 | 符号化装置、復号装置、及びプログラム |
| WO2021062771A1 (zh) * | 2019-09-30 | 2021-04-08 | Oppo广东移动通信有限公司 | 颜色分量预测方法、编码器、解码器及计算机存储介质 |
| CN114902678A (zh) * | 2019-10-29 | 2022-08-12 | Lg电子株式会社 | 基于变换的图像编码方法及其设备 |
| CA3159796A1 (en) | 2019-10-29 | 2021-05-06 | Lg Electronics Inc. | Image coding method based on transform and apparatus therefor |
| WO2022073159A1 (zh) * | 2020-10-07 | 2022-04-14 | 浙江大学 | 特征数据的编解码方法、装置、设备及存储介质 |
| US20240007620A1 (en) * | 2020-11-23 | 2024-01-04 | Hyundai Motor Company | Image encoding and decoding method using adaptive alternative mode |
| WO2022114768A1 (ko) * | 2020-11-24 | 2022-06-02 | 현대자동차주식회사 | 성분 간 참조를 이용하는 잔차신호 생성방법과 장치 |
| CN118216145A (zh) * | 2021-08-13 | 2024-06-18 | 抖音视界有限公司 | 用于视频处理的方法、装置和介质 |
| WO2024090923A1 (ko) * | 2022-10-26 | 2024-05-02 | 주식회사 윌러스표준기술연구소 | 휘도 샘플 기반 색차 샘플 예측을 사용하는 비디오 신호 처리 방법 및 이를 위한 장치 |
| WO2024120478A1 (en) * | 2022-12-07 | 2024-06-13 | Mediatek Inc. | Method and apparatus of inheriting cross-component models in video coding system |
| WO2024193577A1 (en) * | 2023-03-20 | 2024-09-26 | Mediatek Inc. | Methods and apparatus for hiding bias term of cross-component prediction model in video coding |
| WO2024215071A1 (ko) * | 2023-04-12 | 2024-10-17 | 한국전자통신연구원 | 모델 기반 예측 방법을 이용하는 영상 부호화/복호화 방법, 장치 및 비트스트림 저장 매체 |
| WO2024215072A1 (ko) * | 2023-04-14 | 2024-10-17 | 한국전자통신연구원 | 모델 기반 예측 방법을 이용하는 영상 부호화/복호화 방법, 장치 및 비트스트림 저장 매체 |
| WO2024218105A1 (en) * | 2023-04-21 | 2024-10-24 | Interdigital Ce Patent Holdings, Sas | Temporal prediction using cross-component residual model |
| WO2024225784A1 (ko) * | 2023-04-27 | 2024-10-31 | 엘지전자 주식회사 | 인트라 예측에 기반한 영상 부호화/복호화 방법, 장치 및 비트스트림을 저장하는 기록 매체 |
| WO2024237460A1 (ko) * | 2023-05-15 | 2024-11-21 | 현대자동차주식회사 | 인터 예측 신호 기반의 성분간 예측을 위한 방법 및 장치 |
| WO2024240199A1 (en) * | 2023-05-23 | 2024-11-28 | Douyin Vision Co., Ltd. | Method, apparatus, and medium for video processing |
| WO2025011995A1 (en) * | 2023-07-07 | 2025-01-16 | Interdigital Ce Patent Holdings, Sas | Cross component residual prediction |
| CN117376551B (zh) * | 2023-12-04 | 2024-02-23 | 淘宝(中国)软件有限公司 | 视频编码加速方法及电子设备 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1578477B (zh) * | 2003-07-16 | 2011-05-04 | 三星电子株式会社 | 用于色彩图像的视频编码/解码装置和方法 |
| WO2013067667A1 (en) | 2011-11-07 | 2013-05-16 | Intel Corporation | Cross-channel residual prediction |
| EP2697971B1 (en) * | 2011-04-14 | 2015-07-08 | Dolby Laboratories Licensing Corporation | Multiple color channel multiple regression predictor |
| KR20120140181A (ko) * | 2011-06-20 | 2012-12-28 | 한국전자통신연구원 | 화면내 예측 블록 경계 필터링을 이용한 부호화/복호화 방법 및 그 장치 |
| US20140307790A1 (en) * | 2011-11-02 | 2014-10-16 | Nec Corporation | Video encoding device, video decoding device, video encoding method, video decoding method, and program |
| US9344722B2 (en) * | 2011-11-18 | 2016-05-17 | Futurewei Technologies, Inc. | Scanning of prediction residuals in high efficiency video coding |
| CN103379321B (zh) * | 2012-04-16 | 2017-02-01 | 华为技术有限公司 | 视频图像分量的预测方法和装置 |
| US20140286412A1 (en) * | 2013-03-25 | 2014-09-25 | Qualcomm Incorporated | Intra dc prediction for lossless coding in video coding |
| US9736487B2 (en) * | 2013-03-26 | 2017-08-15 | Mediatek Inc. | Method of cross color intra prediction |
| EP2984837B1 (en) * | 2013-04-08 | 2018-01-17 | GE Video Compression, LLC | Inter-component prediction |
| US20140348240A1 (en) | 2013-05-22 | 2014-11-27 | Qualcomm Incorporated | Video coding using sample prediction among color components |
-
2016
- 2016-01-26 US US15/006,994 patent/US9998742B2/en active Active
- 2016-01-27 TN TNP/2017/000284A patent/TN2017000284A1/en unknown
- 2016-01-27 JP JP2017538385A patent/JP6543716B2/ja active Active
- 2016-01-27 HU HUE16708487A patent/HUE041885T2/hu unknown
- 2016-01-27 BR BR112017016111A patent/BR112017016111A2/pt not_active IP Right Cessation
- 2016-01-27 TW TW105102621A patent/TWI705698B/zh active
- 2016-01-27 CA CA2972501A patent/CA2972501C/en not_active Expired - Fee Related
- 2016-01-27 EA EA201791476A patent/EA034473B1/ru unknown
- 2016-01-27 CN CN201680006072.4A patent/CN107211124B/zh active Active
- 2016-01-27 WO PCT/US2016/015129 patent/WO2016123219A1/en active Application Filing
- 2016-01-27 EP EP16708487.0A patent/EP3092803B1/en active Active
- 2016-01-27 KR KR1020177020374A patent/KR102519241B1/ko active IP Right Grant
- 2016-01-27 ES ES16708487T patent/ES2715555T3/es active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EA034473B1 (ru) | 2020-02-12 |
| BR112017016111A2 (pt) | 2018-03-27 |
| CA2972501A1 (en) | 2016-08-04 |
| KR102519241B1 (ko) | 2023-04-06 |
| WO2016123219A1 (en) | 2016-08-04 |
| JP2018509035A (ja) | 2018-03-29 |
| CN107211124A (zh) | 2017-09-26 |
| EA201791476A1 (ru) | 2017-11-30 |
| EP3092803B1 (en) | 2018-12-12 |
| TW201640895A (zh) | 2016-11-16 |
| KR20170107448A (ko) | 2017-09-25 |
| TWI705698B (zh) | 2020-09-21 |
| TN2017000284A1 (en) | 2019-01-16 |
| US9998742B2 (en) | 2018-06-12 |
| CN107211124B (zh) | 2019-10-18 |
| CA2972501C (en) | 2020-08-18 |
| EP3092803A1 (en) | 2016-11-16 |
| US20160219283A1 (en) | 2016-07-28 |
| HUE041885T2 (hu) | 2019-06-28 |
| ES2715555T3 (es) | 2019-06-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6543716B2 (ja) | 適応型成分間残差予測 | |
| CN113612997B (zh) | 针对视频译码使用与位置相关的预测组合的改进视频帧内预测 | |
| US10397607B2 (en) | Color residual prediction for video coding | |
| KR102334126B1 (ko) | 인트라 블록 복사를 위한 레지듀얼 예측 | |
| US9948933B2 (en) | Block adaptive color-space conversion coding | |
| JP5922244B2 (ja) | ビデオコーディングにおいて適応ループフィルタとマージされたサンプル適応オフセット | |
| US9807401B2 (en) | Transform unit partitioning for chroma components in video coding | |
| US9729873B2 (en) | Video coding using parallel motion estimation | |
| US9596463B2 (en) | Coding of loop filter parameters using a codebook in video coding | |
| US20130070855A1 (en) | Hybrid motion vector coding modes for video coding | |
| US20130272409A1 (en) | Bandwidth reduction in video coding through applying the same reference index | |
| JP2019530367A (ja) | ビデオコーディングのための可変数のイントラモード | |
| US20130287109A1 (en) | Inter-layer prediction through texture segmentation for video coding | |
| US9392274B2 (en) | Inter layer texture prediction for video coding | |
| US9648353B2 (en) | Multiple base layer reference pictures for SHVC | |
| US20130329806A1 (en) | Bi-layer texture prediction for video coding | |
| CN111149361B (zh) | 具有在用于视频译码的随机存取配置中的未来参考帧的自适应图片群组结构 | |
| JP2017512025A (ja) | ビデオコーディングにおけるフリッカー検出および軽減 | |
| KR102773139B1 (ko) | 비디오 코딩을 위한 위치-의존적인 예측 결합을 이용한 향상된 비디오 인트라-예측 | |
| KR20250017752A (ko) | 비디오 코딩에서의 개선된 인트라 예측 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180807 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180807 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20180807 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20181120 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181120 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181210 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190308 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190520 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190617 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6543716 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |