以下、添付図面を参照して、本発明に係る実施形態を詳細に説明する。
本実施形態では、主に、基板処理システムの構成、測定処理システムの構成、及びそれらの動作について説明する。
図1は、本実施形態に係る基板処理システムの概略構成を示す図である。以下では、位置関係を明確にするために、互いに直交するX軸、Y軸およびZ軸を規定し、Z軸正方向を鉛直上向き方向とする。
図1に示すように、基板処理システム1は、搬入出ステーション2と、処理ステーション3とを備える。搬入出ステーション2と処理ステーション3とは隣接して設けられる。
搬入出ステーション2は、キャリア載置部11と、搬送部12とを備える。キャリア載置部11には、複数枚の基板、本実施形態では半導体ウェハ(以下ウェハW)を水平状態で収容する複数のキャリアCが載置される。
搬送部12は、キャリア載置部11に隣接して設けられ、内部に基板搬送装置13と、受渡部14とを備える。基板搬送装置13は、ウェハWを保持するウェハ保持機構を備える。また、基板搬送装置13は、水平方向および鉛直方向への移動ならびに鉛直軸を中心とする旋回が可能であり、ウェハ保持機構を用いてキャリアCと受渡部14との間でウェハWの搬送を行う。
処理ステーション3は、搬送部12に隣接して設けられる。処理ステーション3は、搬送部15と、複数の処理ユニット16とを備える。複数の処理ユニット16は、搬送部15の両側に並べて設けられる。
搬送部15は、内部に基板搬送装置17を備える。基板搬送装置17は、ウェハWを保持するウェハ保持機構を備える。また、基板搬送装置17は、水平方向および鉛直方向への移動ならびに鉛直軸を中心とする旋回が可能であり、ウェハ保持機構を用いて受渡部14と処理ユニット16との間でウェハWの搬送を行う。
処理ユニット16は、基板搬送装置17によって搬送されるウェハWに対して所定の基板処理を行う。
また、基板処理システム1は、制御装置4を備える。制御装置4は、たとえばコンピュータであり、制御部18と記憶部19とを備える。記憶部19には、基板処理システム1において実行される各種の処理を制御するプログラムが格納される。制御部18は、記憶部19に記憶されたプログラムを読み出して実行することによって基板処理システム1の動作を制御する。
なお、かかるプログラムは、コンピュータによって読み取り可能な記憶媒体に記録されていたものであって、その記憶媒体から制御装置4の記憶部19にインストールされたものであってもよい。コンピュータによって読み取り可能な記憶媒体としては、たとえばハードディスク(HD)、フレキシブルディスク(FD)、コンパクトディスク(CD)、マグネットオプティカルディスク(MO)、メモリカードなどがある。
上記のように構成された基板処理システム1では、まず、搬入出ステーション2の基板搬送装置13が、キャリア載置部11に載置されたキャリアCからウェハWを取り出し、取り出したウェハWを受渡部14に載置する。受渡部14に載置されたウェハWは、処理ステーション3の基板搬送装置17によって受渡部14から取り出されて、処理ユニット16へ搬入される。
処理ユニット16へ搬入されたウェハWは、処理ユニット16によって処理された後、基板搬送装置17によって処理ユニット16から搬出されて、受渡部14に載置される。そして、受渡部14に載置された処理済のウェハWは、基板搬送装置13によってキャリア載置部11のキャリアCへ戻される。
次に本実施形態の処理ユニット16の詳細な構成について説明する。処理ユニット16は、本発明の基板処理装置に対応し、半導体装置が形成される円形の基板であるウエハWの表面に薬液を供給し、当該ウエハWの周縁部に形成された不要な膜を除去する基板処理が行われる。
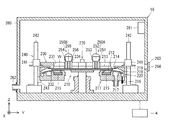
図2及び図3に示すように、処理ユニット16は、ウエハWを水平姿勢で鉛直軸周りに回転可能に保持するウエハ保持部210と、ウエハ保持部210に保持されたウエハWの周囲を囲みウエハWから飛散した処理液を受けるカップ体220と、ウエハ保持部210に保持されたウエハWの上面の周縁部を覆うリング状のカバー部材230と、カバー部材230を昇降させる昇降機構(移動機構)240と、ウエハ保持部210に保持されたウエハWに処理流体を供給する処理液供給部250A,Bと、を備えている。
上述した処理ユニット16の構成部材である、カップ体220、ウエハ保持部210、カバー部材230などは1つのハウジング260内に収容されている。ハウジング260の天井部付近には外部から清浄空気を取り込む清浄空気導入ユニット261が設けられている。また、ハウジング260の床面近傍にはハウジング260内の雰囲気を排気する排気口262が設けられている。これにより、ハウジング260内にハウジング260の上部から下部に向けて流れる清浄空気のダウンフローが形成される。ハウジング260の一つの側壁には、シャッター263により開閉される搬入出口264が設けられている。ハウジング260の外部に設けられた図示しないウエハ搬送機構の搬送アームが、ウエハWを保持した状態で、搬入出口264を通過することができる。ウエハ保持部210は、円板形状のバキュームチャックとして構成されており、その上面がウエハ吸着面となっている。ウエハ保持部210は、不図示の回転駆動機構により、所望の速度で回転させることができる。ウエハ保持部210は、本発明の回転保持部に対応する。
図2に示すように、カップ体220は、ウエハ保持部210の外周を取り囲むように設けられた、有底円環形状の部材である。カップ体220は、ウエハWに供給された後にウエハWの外方に飛散する薬液を受け止めて回収し、外部に排出する役割を有する。
ウエハ保持部210により保持されたウエハWの下面と、このウエハWの下面に対向するカップ体220の内周側部分211の上面212との間には、小さな(例えば2〜3mm程度の高さの)隙間が形成される。ウエハWに対向する上面212には、2つのガス吐出口213、214が開口している。これら2つのガス吐出口213、214は、同心の大径の円周および小径の円周に沿ってそれぞれ連続的に延びており、半径方向外向きに、かつ、斜め上方向に、ウエハWの下面に向けてN2ガス(加熱された窒素ガス)を吐出する。カップ体220の内周側部分211内に形成された不図示のガス導入ラインから円環状のガス拡散空間215にN2ガスが供給され、N2ガスはガス拡散空間215内で加熱されながら円周方向に拡がりながら流れ、ガス吐出口213、214から吐出される。
カップ体220の外周側には、排液路216と排気路217が接続されている。カップ体220の内周側部分211の外周部(ウエハWの周縁の下方の位置)から半径方向外側に向けて環状の案内板218が延びている。また、カップ体220の外周側には、外周壁219が設けられている。外周壁219は、その内周面により、ウエハWから外方に飛散する流体(液滴、ガスおよびこれらの混合物など)を受け止め、下方に向けて案内する。案内板218よりも下方に流入したガスおよび液滴の混合流体はそれぞれ分離され、液滴は排液路216から排出され、ガスは排気路217から排出される。
カバー部材230は、処理が実行されるときに、ウエハ保持部210に保持されたウエハWの上面周縁部と対向するように配置されるリング形状の部材である。カバー部材230は、ウエハWの上面周縁部の近傍を流れてカップ体220内に引き込まれる気体を整流するとともに気体の流速を増大させ、ウエハWから飛散した処理液がウエハWの上面に再度付着することを防止する。
カバー部材230は内周面231を有しており、内周面231は上方から下方に向けて鉛直方向に延び、ウエハWに近づくに従って半径方向外側に向かうように傾斜している。また、カバー部材230はウエハWに対向する水平な下面232を有し、水平な下面232とウエハWの上面との間に、鉛直方向の隙間が形成されている。カバー部材230の外周縁はウエハWの外周端(エッジ)Weよりも半径方向外側に位置している(図3参照)。なお、洗浄の対象となる周縁部は、例えば、外周端からの半径方向内側の約3mmの領域であり、カバー部材230の水平な下面に覆われる範囲である。
ウエハ保持部210にウエハWが保持され、かつ、カバー部材230が処理位置に位置したときの状態が平面図である図3に示されている。図3において、カバー部材230に覆われて隠れているウエハWの外周端Weが一点鎖線で示されている。また、カバー部材230の内周縁は符号5eで示されている。
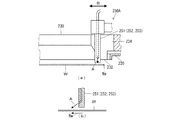
図2及び図3に示すように、カバー部材230を昇降させる昇降機構240は、カバー部材230を支持する支持体233に取り付けられた複数(本例では4つ)のスライダー241と、各スライダー241を貫通して鉛直方向に延びるガイド支柱242とを有している。各スライダー241には、シリンダモータ(不図示)が連結されており、シリンダモータを駆動することにより、スライダー241がガイド支柱242に沿って上下動し、これによりカバー部材230を昇降させることができる。カップ体220はカップ昇降機構(不図示)の一部を成すリフタ243に支持されており、リフタ243を図2に示す状態から下降させると、カップ体220が下降し、図1で示した基板搬送装置17とウエハ保持部210との間でのウエハWの受け渡しが可能となる。
次に、図2、図3及び図4を参照して、処理液供給部250A,Bについて説明する。図3に示すように、処理液供給部250Aは、アンモニア、過酸化水素および純水の混合溶液であるSC−1液を吐出する薬液ノズル251と、リンス液(本例ではDIW(純水))を吐出するリンスノズル252と、を有する。また、処理液供給部250Aは、乾燥用ガス(本例ではN2ガス)を吐出するガスノズル253を有する。処理液供給部250Bは、HF液を吐出する薬液ノズル254と、リンス液を吐出するリンスノズル255と、を有し、また、乾燥用ガスを吐出するガスノズル256とを有する。
処理液供給部250Aは本発明の第1処理液供給部に対応し、薬液ノズル251及びリンスノズル252から吐出される液は本発明の第1処理液に対応する。また、処理液供給部250Bは本発明の第2処理液供給部に対応し、薬液ノズル254及びリンスノズル255から吐出される液は本発明の第2処理液に対応する。なお、第1処理液及び第2処理液の種類は本実施形態に開示のものに限定されるものではなく、第1処理液供給部と第2処理液供給部との位置関係は逆であっても良い。
図2及び図4(a)に示すように、処理液供給部250Aのノズル251〜253は、カバー部材230の内周面に形成された凹所234に収容されている。各ノズル(251〜253)は、図4(b)において矢印Aで示すように、斜め下方に向けて、かつ、矢印Aで示す吐出方向がウエハWの回転方向Rwの成分を持つように処理流体を吐出する。なお、処理液供給部250Aは不図示の駆動機構を備えており、液吐出に際して最適なウエハW上の位置に液が着液するように、各ノズル(251〜253)は矢印Bの方向に進退して位置調整できるようになっている。処理液供給部250Bも処理液供給部250Aと同様の構成を有する。
図2に示した制御装置4は、処理ユニット16の全ての機能部品(例えば、不図示の回転駆動機構、昇降機構240、ウエハ保持部210、各種処理流体供給機構等)の動作を制御する。
撮像装置270は、本発明の撮像部に対応し、後述のウエハWに関する測定処理等を行うためのものである。撮像装置270は、カバー部材230に固定されており、撮像を行うための開口がウエハWの周縁部の鉛直上方(Z軸方向)に位置するように配置されている。
本実施形態における撮像装置270の構成について、図5に示す断面図を用いて説明する。撮像装置270は、撮像機能部501と光ガイド部502から構成される。撮像機能部501は光ガイド部502を介してウエハWを撮像するためのものである。光ガイド部502は、照明光をウエハWの表面に導くとともにウエハWの照明光に対する反射光(以下、光学像と呼ぶ)を撮像機能部501に導くためのものである。光ガイド部502は、カバー部材230の側面に取り付け面AAを介して取り付けられている。カバー部材230は図2に示した断面形状を有しているが、光ガイド部502の取り付け面AAに相当する円周方向の領域は切り欠かれている。ただし、カバー部材230と光ガイド部502とを合わせた全体の断面形状の輪郭は、図2に示したカバー部材230の断面形状の輪郭と一致するように形成されている。
撮像機能部501は、撮像センサ503を備えている。本実施形態において、撮像センサ503は、1600画素×1200ラインからなる約200万画素の有効画素領域を備えたCCDセンサであり、受光レベルに応じて輝度信号に対応する信号のみ生成する。撮像センサ503の表面前方には少なくとも焦点調整の機能を有する撮像光学機構504が備えられている。撮像光学機構504はレンズ群を包含し、焦点調整のためにレンズの位置を変化させることができる。本実施形態では、使用者が直接的に手動でレンズ位置を調整して焦点調整するための調整部材505が設けられている。調整部材505は、カバー部材230及び撮像機能部501よりも高い位置に設けられているので、装置の使用者は容易に手動操作することができる。
撮像光学機構504の光軸方向の前方には、ミラー506が設けられている。撮像装置270はウエハWの鉛直上方(Z軸方向)に向いた開口を設けているので、撮像対象物となるウエハWの表面の光学像は鉛直上方向LZを向くことになる。ミラー506は、光学像の方向を水平方向LXに変換し、撮像センサ503及び撮像光学機構504の光軸と一致させる。
照明室507は、ウエハWへの照射光を形成させるためのものであり、その内部にLED照明部508とミラー509が設けられている。LED照明部508は、ウエハWを照らすための照射光を発生する。ミラー509は、LED照明部508からの照射光を鉛直下向きに反射させ、その一方で、LZ向きの光学像を透過させる。開口510は矩形の断面形状を有しており、照明室508のミラー509を反射した照射光を下方向へと導くものである。なお、開口510の断面は円形に形成しても良い。
ガラス窓511は、上端において開口510と同じ断面形状を有しており、開口510から入射した照射光を撮影対象であるウエハWの表面へと導く。また、ウエハWの表面からの反射光を光学像としてLZ方向へと導く。ガラス窓511の下面512は撮像装置270の下端であって、ウエハWの上面の周縁部に対向した平面を有しており、この平面は図1のカバー部材230の下面232と同じ高さになっている。また、上述したように、カバー部材230の形状と一致させるために、ガラス窓511の外側側面513はカバー部材230の外側底面の高さでその上方よりも窪んでいる。このため、ガラス窓511は全体として断面視でL字型になるよう形成されている。
処理液供給部250A,Bが薬液やリンス液をウエハWに供給しているとき、薬液や水分を含んだ雰囲気が撮像装置270の開口510の下方領域を通過する。ガラス窓511は、このような雰囲気が撮像装置270の筐体内に進入して内部構造が腐食されることを防ぐために、雰囲気が開口510に進入するのを遮断する機能を有している。ガラス窓511は透明な部材なので、雰囲気は遮断するが、照射光やウエハ表面からの反射光は通過させる。
内側カバー部材514は、ガラス窓511への被液を防ぐものであり、図2で示したカバー部材230の内周面231と同じ形状を有している。この様に、ガラス窓511の下端512、外側側面513、カバー部材514によって、カバー部材230の断面と同様な輪郭形状を形成することによって、薬液処理やリンス処理を行っているときのカバー部材230からカップ体220へと通過しようとする気流が、撮像装置270の形状に起因して乱れることを抑制する。
撮像機能部501において、撮像制御部515は、撮像装置270の撮像動作の制御及び撮像画像に対する画像処理等を行う。撮像センサ503で受光された光学像は光電変換され、輝度信号に対応するアナログ信号に変換された後、撮像制御部515に送られる。撮像制御部515は、受信したアナログ信号をA/D変換して輝度を示すデジタル信号を生成し、所定の画像処理を行って1フレームの撮像画像を形成する。なお、撮像制御部515は、静止画フレームを連続的に取得することで動画像を形成することもできる。ケーブル516は、外部装置と制御信号のやり取りを行うとともに、撮像画像を外部装置に対して送信する。
本実施形態における測定処理システム600について、図6を用いて説明する。本システムは撮像装置270、測定処理装置601、情報処理装置602、制御装置4から構成されている。
撮像装置270は、図5を用いて説明したように、撮像センサ503、撮像光学機構504、LED照明部508、及び撮像制御部515、ケーブル516等を有している。後述するように、撮像制御部515は、ケーブル516を介して測定処理装置601から受信した制御信号に基づき撮像条件を変更して撮像させることができる。
測定処理装置601は、撮像装置270により得られた撮像画像を処理して、後述するカット幅や偏芯量等を測定する装置である。測定処理装置601は、その筐体内に、制御部603、記憶部604を少なくとも有する。
制御部603は、測定処理装置601の各ブロックを制御するとともに撮像装置270の動作を制御する。また、後述の測定処理プログラムを実行することにより、カット幅や偏芯量に関する演算を行う。記憶部604は、制御部603が実行する後述の測定処理プログラムや後述の画像処理レシピを記憶する。また、撮像装置270からケーブル516を介して受信した撮像画像を一時的に記憶し、制御部603が算出した測定結果を記憶する。測定処理装置601は、通信線605を介して情報処理装置602や制御装置4との間での各種情報の送受信が可能である。
情報処理装置602は、測定処理装置601から送られてきた撮像画像や測定結果を蓄積するとともに、それらの情報を制御装置4に対して送信することができる。情報処理装置602は、その筐体内に、制御部606、記憶部607を少なくとも有する。制御部606は、情報処理装置602の各ブロックを制御するとともに測定処理装置601に対しても各種指令を送信することができる。また、測定結果を分析する機能も有する。記憶部607は、測定処理装置601から送られてきた撮像画像や測定結果を蓄積する。情報処理装置602は、通信線605を介して測定処理装置601や制御装置4との間で各種情報の送受信が可能である。
制御装置4は、図1に示したように基板処理システム1の全体を制御するものであり、測定処理装置601や情報処理装置602と連携した動作も可能である。制御装置4は、通信線605を介して測定処理装置601や情報処理装置602との間で各種情報の送受信が可能である。また、制御装置4には、操作装置608と表示装置609が接続されている。表示装置609は、情報処理装置602から受信した撮像画像や結果画像の表示を行う。操作装置608は、例えば、キーボード、マウス、タッチパネル等の入力デバイスを含み、測定処理の対象となるウエハWに施すべき処理を記述したウエハ処理レシピの選択を行うことができる。
本実施形態において、測定処理システム600を構成する各装置は、基板処理システム1の筐体内部に収容されている。ただし、この例に限らず、1つ又は複数の装置を別筐体で構成し、通信線605を有線又は無線のネットワークで構成しても良い。一例として、情報処理装置602を基板処理システム1とは別筐体で構成して、遠隔で基板処理システム1を管理できるようにシステムを構成することもできる。
次に、図7を用いて、本実施形態の基板処理システム1及び測定処理システム600により実行される基板処理及び測定処理の全体フローを説明する。この処理動作は、25枚のウエハWを1セットとして実行され、本フローチャートは、1セット内の1枚のウエハWの処理動作を示すものである。
まず、処理ユニット16へのウエハWの搬入が行われる(S101)。ここでは、昇降機構240によりカバー部材230を退避位置(図1より上方の位置)に位置させるとともに、カップ昇降機構のリフタ243によりカップ体220を下降させる。次いで、ハウジング260のシャッター263を開いて図1に示した基板搬送装置17の搬送アームをハウジング260内に進入させ、基板搬送装置17の搬送アームにより保持されたウエハWをウエハ保持体210の真上に位置させる。次いで、搬送アームをウエハ保持部210の上面より低い位置まで降下させて、ウエハWをウエハ保持部210の上面に載置する。次いで、ウエハ保持部210によりウエハWを吸着する。その後、空の基板搬送装置17をハウジング260内から退出させる。次いで、カップ体220を上昇させ図2に示す位置に戻すとともに、カバー部材230を図1に示す処理位置まで降下させる。以上の手順により、ウエハの搬入が完了し、図2に示す状態となる。
次に、薬液等を用いてウエハ処理が行われる(S102)。本実施形態におけるウエハ処理の詳細については、後述する。
次に、ウエハWに対する測定処理が行われる(S103)。本実施形態における測定処理の詳細については、後述する。
最後に、処理ユニット16からのウエハWの搬出が行われる(S104)。ここでは、カバー部材230を上昇させて退避位置に位置させるとともにカップ体220を下降させる。次いで、ハウジング260のシャッター263を開いて基板搬送装置17の搬送アームをハウジング260内に進入させ、空の搬送アームをウエハ保持部210に保持されたウエハWの下方に位置させた後に上昇させ、ウエハWの吸着を停止した状態のウエハ保持部210から搬送アームがウエハWを受け取る。その後、ウエハWを保持した搬送アームがハウジング260内から退出する。以上により、1枚のウエハWに対する一連の液処理が終了する。
次に、本実施形態におけるステップS102で行われるウエハ処理について、図8のフローチャートを用いて具体的に説明する。
まず、第1薬液処理が行われる(S201)。ここでは、ウエハWを回転させ、また、カップ体220のガス吐出口213、214からN2ガスを吐出させて、ウエハW、特に被処理領域であるウエハWの周縁部を薬液処理に適した温度(例えば60℃程度)まで加熱する。ウエハWが十分に加熱されたら、ウエハWを回転させたままで処理液供給部250Aの薬液ノズル251から薬液(SC1)をウエハWの上面(デバイス形成面)の周縁部に供給し、ウエハ上面周縁部にある不要な膜を除去する。
次に、第1リンス処理が行われる(S202)。ここでは、所定時間薬液処理を行った後、薬液ノズル251からの薬液の吐出を停止して、処理液供給部250Aのリンスノズル252からリンス液(DIW)をウエハWの周縁部に供給し、リンス処理を行う。このリンス処理により、ウエハWの上下面に残存する薬液および反応生成物等が洗い流される。なお、ここで、後述のステップS205と同様の乾燥処理を行っても良い。
そして、第2薬液処理が行われる(S203)。ここでは、第1薬液処理では除去できない不要物を除去するための、ウエハWに対する薬液処理が行われる。第1薬液処理と同様にウエハWを回転させるとともにウエハWを加熱し、処理液供給部250Bの薬液ノズル254から薬液(HF)をウエハWの上面(デバイス形成面)の周縁部に供給し、ウエハ上面周縁部にある不要な膜を除去する。
次に、第2リンス処理が行われる(S204)。ここでは、所定時間薬液処理を行った後、引き続きウエハWの回転およびガス吐出口213、214からのN2ガスの吐出を継続し、薬液ノズル254からの薬液の吐出を停止して、処理液供給部250Bのリンスノズル255からリンス液(DIW)をウエハWの周縁部に供給し、リンス処理を行う。このリンス処理により、ウエハWの上下面に残存する薬液および反応生成物等が洗い流される。
最後に乾燥処理が行われる(S205)。所定時間リンス処理を行った後、引き続きウエハWの回転およびガス吐出口213、214からのN2ガスの吐出を継続し、リンスノズル255からのリンス液の吐出を停止して、ガスノズル256から乾燥用ガス(N2ガス)をウエハWの周縁部に供給し、乾燥処理を行う。
次に図9を参照して、ステップS102で行われる薬液処理におけるウエハW上の液状態と撮像装置270の配置の関係について説明する。
はじめに、ステップS201における、第1薬液(SC−1液)をウエハWに向けて吐出する第1薬液処理について説明する。
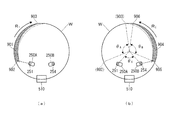
図9(a)に示すように、ウエハWは第1回転方向R1に回転させる。回転数は例えば2000〜3000rpmとなっており、薬液ノズル251からウエハWの上面の周縁部に第1薬液が供給される。図9(a)において、ウエハWの上面に存在する(乗っている)第1薬液が符号901で表されている。このように、第1回転方向R1に回転しているウエハWの周縁部の到達領域902に供給された第1薬液は、回転による遠心力によってウエハWの外側へ移動していき、そしてウエハWから振り切られて外方へ飛散する。ウエハWの外方へ飛散した第1薬液は、カップ体220の外周壁219の内周面を介して排液路216から外部へ排出される。
ウエハW上において第1薬液がウエハWから全て振り切られる位置903は、薬液ノズル251から吐出される第1薬液の速度、ウエハWの回転速度、および上述の第1薬液到達領域902からウエハWの側端部までの距離などのパラメータに依存する。例えば、回転数を減らすと遠心力により薬液が振り切られにくくなるので、点線で示されるように薬液が存在する領域が増加する。
ステップS202における、リンスノズル252および吐出されてウエハW上に到達するリンス処理液に関しても同様に振舞う。ただしリンスノズル252からのリンス液の到達領域は、第1薬液の到達領域902とほぼ同じ位置であるが、少しだけ回転方向手前側かつウエハWの中心側にずれた位置ある。このため、ウエハWの上面を第1薬液が流れた領域をリンス処理液によって確実に洗浄することができる。
ステップS203における、第2薬液(HF)をウエハWに向けて吐出する第2薬液処理について説明する。
図9(b)に示すように、ウエハWは第1回転方向R1とは逆の第2回転方向R2に回転させる。回転数は例えば2000〜3000rpmとなっており、薬液ノズル254からウエハWの上面の周縁部に第2薬液が供給される。図示されるように、ウエハWの上面に存在する(乗っている)第2薬液が符号904で表されており、到達領域905に供給された第2薬液はステップS201における第1薬液と同様の振る舞いを示す。ステップS204における、リンスノズル255および吐出されてウエハW上に到達するリンス処理液に関してもリンスノズル252と同様に振舞う。
以上のように、ステップS201及びS202とステップS203及びS204とで逆回転させることにより、ウエハWの上面に存在する第1薬液901及び第2薬液904の領域や全ての薬液が振り切られる位置903及び906を調整することができる。ここで、処理液供給部250A及び処理液供給部250BとウエハWの中心を結んでなる角度が“θX”度、到達領域902及び位置903とウエハWの中心を結んでなる角度が“θA”、到達領域905及び位置906とウエハWの中心を結んでなる角度が“θB”とする(図9(b)参照。)。このとき、各角度の関係式として、θX+θA+θB<360度となればよい。例えば、θX=60度としたとき、θA<120度、θB<120度とすることで、この条件を満たし、薬液が振り切られる位置903及び906が円周上で交わることはない。この様に、ウエハW上から振り切られた処理液が、カップ体220の内部で互いに交じり合って反応することによる塩の発生等を抑制することができる。
また、第1回転方向R1に関してウエハWにおける第1薬液及びリンス液の到達領域902よりも手前に開口510を位置させ、第2回転方向R2に関してウエハWにおける第2薬液及びリンス液の到達領域905よりも手前に開口510を位置させている。このように撮像装置270の開口510を配置することで、薬液処理を行っているときに開口510が被液することを抑制することができる。
図10は、撮像装置270のウエハWに対する撮像画角を示す図である。図10に示すように、撮像装置270は、ウエハWの周縁に位置する矩形領域を撮像画角1001とする。
測定処理装置601は、カット幅及び偏芯量の測定のために、撮像画角1001の全体の撮像画像から切り出された画像を用いる。具体的には、撮像装置270の画角1001のうち、ウエハWの境界に沿って位置調整された、1001a、1001b、1001c、1001d、及び1001e、の5つの領域の切り出された撮像画像を用いる。切り出された撮像画像のサイズは、例えば、X軸方向320画素×Y軸方向240画素である。さらに、本実施形態では、後述するように、それぞれの撮像画角1001について、第1撮像条件及び第2撮像条件で、それぞれ2つの撮像画像を取得する。
図11を用いて、撮像装置270、処理ユニット16、及びウエハWの配置関係を説明する。図示するように、ウエハWは、周縁部にラウンドを有し、上面には処理膜が形成され、その周縁部の処理膜のみが除去(カット)されている。なお、ウエハWの直径は300mmであり、円周方向に関して誤差は無いものとする。
撮像装置270が適切に設置された場合、撮像装置270の縦(X軸)方向の撮像画角は、内端(上端)がウエハWの処理膜上にあり、外端(下端)が、図2に示した内周側部分211の上面212上にある。したがって、撮像装置270による撮像画像には、画角内端(上端)から順に、処理膜領域1101、カット面領域1102、ラウンド領域1103、上面領域1104が存在することになる。ここで、処理膜領域1101は、形成された処理膜が薬液により除去されることなくそのまま残っている領域である。カット面領域1102は、形成された処理膜が除去された領域のうち、ウエハWの周端に形成されているラウンドを含まない平面の領域である。ラウンド領域1103は、処理膜が除去された又は初めから処理膜が形成されていないラウンドの領域である。上面領域1104は、ウエハWの周端縁から先に形成された領域である。
そして、カット幅は、ウエハWの周端部において処理膜の周縁端とウエハWの周縁端との間にカット面領域1102とラウンド領域1103とで形成される処理膜が存在しない領域(処理膜が除去された又は初めから処理膜が形成されていない領域)の幅である。なお、カット面領域1102の幅をカット面幅といい、ラウンド領域1103の幅をラウンド幅という。
次に、ステップS103で示した、本実施形態の各装置が連携して行うカット幅及び偏芯量の測定動作について、図12のフローチャートを用いて説明する。本フローチャートにおける測定動作は、測定処理装置601の制御部603が記憶部604に記憶された測定処理プログラムを実行することにより達成される。
全体フローがステップS103に移行したとき、撮像装置270、処理ユニット16、及びウエハWの配置関係は、すでに図11に示す状態となっている。
まず、測定処理装置601は、撮像装置270が行うべき撮像条件として、以下に示す第1撮像条件と第2撮像条件の設定を行う(ステップS301)。なお、このとき、ウエハWは所定の回転初期位置にある。
次に、ウエハWの第1撮像条件での撮像が行われる(ステップS302)。ここでは、まず、測定処理装置601の制御部603は、撮像装置270に対して、第1撮像条件で撮像動作を行うよう制御指示を送信する。制御指示を受けた撮像制御部515は、受信した制御指示に従い、第1撮像条件で撮像するよう撮像センサ503及びLED照射部508を制御し、撮像させる。撮像制御部515は、撮像センサ503の撮像により得られた信号を1フレームの輝度信号の撮像画像に変換し、測定処理装置601に対して送信する。測定処理装置601に転送された撮像画像は記憶部604に記憶される。ここで、第1撮像条件の内容と実際の撮像画像の状態については後述する。
第1撮像条件による撮像の後、続けてウエハWの第2撮像条件での撮像が行われる(ステップS303)。ここでの動作は、ステップS303と同様なものであり、その第2撮像条件の内容と実際の撮像画像の状態については後述する。
次に、予め設定しておいた全ての位置での撮像を行ったかを判定する(S304)。
本実施形態では、ステップS302及びステップS303で撮像した位置から1度ずつ回転させながら360回の撮像を行うので、360個の位置で撮像を行った場合にのみ判断“Yes”がなされる。
ここでは、まだ、ステップS301での初期設定の位置のみでの撮像を行ったのみなので(ステップS304:No)、ステップS305の回転動作に移行する。
制御装置4は、回転駆動部を駆動させてウエハ保持部210を回転させることにより、保持されているウエハWを1度回転させて、撮像装置270の真下に、次の撮像位置が配置されるようにする(S305)。
回転動作が終了したら、ステップS302に戻り、同様の撮像動作及び回転動作を行う。以上の動作を360回行ったら、全ての位置での撮像を行ったことになるので(ステップS304:Yes)、ステップS306に移行し、360セットの第1撮像画像及び第2撮像画像を用いて、画像解析処理を行う(S306)。そして、その測定結果として、カット幅と偏芯量を得る(S307)。画像解析処理の詳細は後述する。
本実施形態では、制御部603は、第1撮像条件による第1撮像画像、第2撮像条件による第2撮像画像、カット幅を情報処理装置602に送信する(S308)。情報処理装置602は、受け取った第1撮像画像及び第2撮像画像を記憶部607に記憶する。
次にステップS302〜S306における撮像動作及び画像解析処理の詳細について説明する。
本実施形態で測定する情報は、ウエハWのカット幅である。この値は、図11の関係を参照すると、それぞれ、以下の算出式(1)〜(3)により算出できる。
・カット幅[mm]=カット面領域1102の幅[mm]+ラウンド領域1103の幅[mm]・・・式(1)
ここで、
・カット面領域1102の幅[mm]=(カット面境界1110の位置[画素]−処理膜境界1109の位置[画素])/スケーリング値[画素/mm]・・・式(2)
・ラウンド領域1103の幅[mm]=(ウエハ周縁端1111の位置[画素]−カット面境界1110の位置[画素])/スケーリング値[画素/mm]・・・式(3)
以上の式(1)〜(3)において、“位置[画素]”とは、切り出し画像の内端からの横方向の画素数のカウント値を意味する。本実施形態において、切り出し画像の横方向(X軸方向)の画素数は320個であるので、“位置[画素]”としては、1〜320の値をとりうる。
ここで、すでに、スケーリングウエハ等を用いて、カメラにより得られた撮像画像の画素数とウエハWが置かれる平面上の長さ[mm]との対応関係は測定され、決定されているものとする。本実施形態では、“スケーリング値”=20画素/mm、という値を記憶部604に記憶しておく。
本実施形態では、図10に示したように、1つの撮像画像から5つの領域を抽出してそれぞれ、カット幅を求め、それらの平均値を、それぞれの領域における最終的なカット幅値とする。
式(1)〜(3)のように、カット幅を算出するには、(a)カット面境界1110の位置、(b)処理膜境界1109の位置、(c)ウエハ周縁端1111の位置の3つの境界位置を撮像画像の画素の輝度レベルの変化量(輝度エッジ量)から特定する必要がある。ここで、輝度エッジ量は、隣接画素間の輝度値の差分絶対値からピーク値を求める方法や、公知のエッジフィルタを画像に対して適用する方法を用いることができる。
本実施形態のウエハW及び処理ユニット16の各領域1101〜1104は、その材質特有の反射特性やその構造特有の反射特性を持っている。LED照明部508から生成した同一照度の照射光が入射した場合、例えば、材質の違いによって、カット面領域1102のほうが、処理膜領域1101の反射光レベル(グレー)よりも高い反射光レベル(明るいグレー)になる。一方、カット面領域1102とラウンド領域1103は同じ材質であるが、ラウンド領域1103は傾斜しているため、撮像センサ503の方向への反射光レベルが低い(黒色に近い)。
上面領域1104は、反射面が相対的に遠いため光の減衰が生じるが、ある程度の反射光レベル(黒に近いグレー)を有する。
したがって、撮像センサ503で受光される光学像における照度レベルは、結果的に、カット面領域1102、処理膜領域1101、上面領域1104、ラウンド領域1103の順で高い。
このように、本実施形態では、LED照射部508からの同一照度の照射光を用いた場合、光学像における照度レベルの幅がとても広くなってしまうため、通常の広さのダイナミックレンジをもつ撮像センサ503では、すべての領域の照度レベルが適切な輝度レベルになるよう撮像することができない。そして、適切な輝度レベルを持たない撮像画像からは、正確な輝度エッジが算出できず、3つの境界位置(a)〜(c)の特定に誤差が生じてしまう。
本実施形態では、明るさに関する条件が互いに異なる第1撮像条件と第2撮像条件とを予め準備しておき、撮像時には、これらを用いて2回に分けて撮像することにより、上記問題を解決する。便宜上、第2撮像条件及び第2撮像画像から先に説明する。
第2撮像条件は、相対的に明るい撮像画像を取得して(b)処理膜境界1109の位置が正確に特定できるように、中間照度レベルを重視した撮像条件が設定される。すなわち、光学像の照度レベルが輝度信号に変換される際に、光学像における処理膜領域1101の照度レベルやカット面領域1102の照度レベルに広い幅の諧調が出るようにする。具体的には、例えば、CCDの感度(例えば、ISO感度)を設定したり、不図示の露出調整機構によるCCDの受光時間を設定したりすることにより調整できる。
ここで、第2撮像条件は、中間照度レベルを重視しているため、低照度レベルの領域の再現性は低いものになる。すなわち、上面領域1104、ラウンド領域1103の照度レベルの諧調が狭くなるため、いずれの領域も黒色に近い色の画像となって現れる。
第2撮像条件により撮像された第2撮像画像の模式図を図13に示す。処理膜領域1101とカット面領域1102の輝度信号レベルは諧調が十分に保たれているので、この2つの領域の画素の輝度レベルの変化、すなわち輝度エッジの検出が容易に可能となり、(b)処理膜境界1109の位置を正確に特定することができる。なお、(a)カット面境界1110の位置も正確に特定することができる。一方で、上面領域1104、ラウンド領域1103は、いずれも、低い輝度信号値(ほぼ黒色)に位置する。このため、輝度エッジの検出が困難であり、(c)ウエハ周縁端1111の位置の位置を特定することができない。
本実施形態では、(c)ウエハ周縁端1111の位置を、もう一方の撮像条件である第1撮像条件により撮像された相対的に暗い第1撮像画像から特定する。
第1撮像条件は、低照度レベルを重視した撮像条件が設定される。すなわち、光学像の照度レベルが輝度信号に変換される際に、光学像におけるラウンド領域1103の照度レベルに広い幅の諧調が出るようにする。具体的には、例えば、CCDの感度(例えば、ISO感度)を第2撮像条件よりも高感度に設定したり、CCDの受光時間を第2撮像条件よりも長時間に設定したりすることにより調整できる。
ここで、第1撮像条件は、低照度レベルを重視しているため、中間照度レベルの領域の再現性は低いものになる。すなわち、処理膜領域1101とカット面領域1102の照度レベルの諧調が狭くなるため、ほとんど白色に近い色の画像となって現れる。
第1撮像条件により撮像された第1撮像画像の模式図を図14に示す。上面領域1104、ラウンド領域1103の輝度信号値は諧調が十分に保たれているので、輝度エッジの検出が容易に可能となり、(c)ウエハ周縁端1111の位置を正確に特定することができる。一方で、処理膜領域1101とカット面領域1102は、いずれも、高い輝度信号値(ほぼ白色)に位置する。このため、輝度エッジの検出が困難であり、(b)処理膜境界1109の位置を特定することができない。
以上のように、第1撮像条件に基づく第1撮像画像及び第2撮像条件に基づく第2撮像画像の2つの画像を用いて、(a)カット面境界1110の位置、(b)処理膜境界1109の位置、(c)ウエハ周縁端1111の位置を正確に求めることができる。
制御部603は、上記式(1)〜(3)に、上記の位置情報(a)〜(c)を適用することにより、カット幅を算出する。他の切り出し画像1000a,b,d,eについても同様にカット幅を算出し、それらの値を平均したものを、撮像画像1001により求めた最終的なカット幅として決定する。
次に、図15を用いて、保持部210に対するウエハWの偏芯の状態について説明する。基板搬送装置17がウエハ保持部210にウエハWを置いた際のウエハWの中心位置WOと、ウエハ保持部の中心位置HOとが、X軸及びY軸方向にずれていることがある。この現象は、例えば、基板搬送装置17の調整不足や長時間の使用による構成部材の磨耗等により起きる。本実施形態では、本来あるべき基板中心位置HOからのずれ量を偏芯量WDと定義する。
図15に、画像1000a〜eの切り出し領域とウエハWの位置関係を示す。基板搬送装置17がウエハ保持部210にウエハWをずれて置いた直後は、ウエハWの中心位置WOは、円環1501上のどこかの位置にある。そして、ウエハWを矢印のように回転させた場合、ウエハWの中心位置WOは、図15のX軸線上のWO1とWO2の位置を必ず通過する。
本実施形態のように撮像装置270を固定してこの様な偏芯があるウエハWを回転させながら撮像した場合、上述したウエハ周縁端1111の位置が周期的に変化するという現象が起こる。画像1000a〜eの切り出し領域で見たとき、ウエハ周縁端1111は、ウエハWの中心がWO1にあるときは位置1502に現れ最小値を取り、ウエハWの中心がWO2にあるときは位置1503に現れ最大値を取る。
中心位置WO1とWO2の差分は、ウエハ周縁端1111の最大値と最小値の差分と等しい。したがって、偏芯量WD=(ウエハ周縁端1111の最大値−ウエハ周縁端1111の最小値)/2・・・式(4)、と求めることができる。
図16は、図12に示した測定処理により取得した360度ウエハWを回転させたときの、ウエハWの回転角度に対するカット幅の測定結果を示すグラフである。
この例は、ウエハWが偏芯させたまま、図7のステップS102のウエハ処理を行った場合における測定結果である。ウエハ周縁端1111と同様に、カット幅も角度に応じて周期的に変動する。本実施形態において、測定処理装置601は、360点の測定結果からカット幅の平均値“Ave”、最大値“Max”、及び最小値“Min”を特定する。ここで、360点の撮像画像におけるウエハ周縁端1111の周期的変動に対して処理膜境界1109の変動が無視できる程度に小さいと想定できる場合、カット幅の変動量においてウエハ周縁端1111の変動量が支配的になる。したがって、偏芯量WD=(最大値“Max”−最小値“Min”)/2・・・式(5)、と計算することができる。
測定処理装置601は、カット幅及び偏芯量を示す情報である、360点の平均値“Ave”、最大値“Max”、及び最小値“Min”を、情報処理装置602に対して送信する。
情報処理装置602は、測定処理装置601から受け取った測定結果情報に基づき、制御装置4に接続された表示装置609に表示させる情報を生成する。
図17は、表示装置609に表示される測定結果情報を示す表示画面1700の一例を示す図である。レシピ情報ウインドウ1701は、測定処理を行わせるウエハWに施すべき薬液処理等の設定値、例えば、カット幅の設定値を表示させる。また、処理対象のウエハWの膜種別を表示させる。
測定結果ウインドウ1702は、測定結果として得られたカット幅、ここでは、上記の平均値“Ave”を表示させる。また、上記の式(5)で計算される偏芯量WDも表示させる。
第1画像ウインドウ1703及び第2画像ウインドウ1704は、それぞれ、第1撮像条件により得られた撮像画像、第2撮像条件により得られた撮像画像を確認用に表示させることができる。
グラフウインドウ1705は、例えば、図16で示した角度に応じたカット幅の変化など、様々な測定結果を視覚化してその特徴を確認するために用いるものである。
本実施形態で得られたカット幅は、例えば、処理ユニット16の処理液供給部250を調整するための情報として用いられる。システムの使用者は、予め設定しておいたカット幅と実際の測定により得られたカット幅との差分値に基づき、例えば、薬液ノズル208の位置を微調整することができる。また、第2の実施形態で説明するように、偏芯量を求めれば、ウエハWの保持位置調整を行うこともできる。
以上説明したように、本実施形態によれば、第1回転方向R1に関してウエハWにおける処理液の到達領域902よりも手前の位置に撮像装置270の開口510を位置させるようにした。これにより、ウエハWを保持した状態で基板の周縁部を撮像できるように撮像装置270をカバー部材230に配置しても、撮像装置270への被液が生じることなく、良好な撮像ができる。また、撮像装置270をカバー部材230の一部を切り欠いて取り付け、全体として他の位置のカバー部材230の断面と同一になるようにした。このように内側側面や下面の形状までも同じにすることにより、カバー部材270周辺での気流の乱れ等が生じず、良好な液処理が可能となる。
<第1実施形態の変形例1>
上記実施形態の変形例1として、焦点調節に関連するシステム構成例を2つ説明する。
まず、図5に示した撮像装置270の調整部材505を操作することによる焦点調節について説明する。使用者による焦点調節作業は、どの程度ウエハWに焦点が合っているかを使用者がリアルタイムに撮影画像で確認しながら操作したほうが迅速に進む。本実施形態では、表示装置609に撮像画像を表示させるようにする。
具体的には、焦点調節作業を行っている間も、撮像制御部515は、撮像センサ503を動作させ、例えば、5fpsのフレームレートで連続的にウエハWの画像を取り込み、測定処理装置601に送信する。測定処理装置601は、受け取った連続的な画像を表示装置609に表示できるよう加工して制御装置4に向けて送信する。制御装置4は、受け取った撮像画像を、例えば上記の図17で示した第1画像ウインドウ1703又は第2画像ウインドウ1704に表示させる。この場合、表示装置609は、基板処理システム1の筐体と一体化させておく必要はなく、利便性を向上させるため、基板処理システム1と有線又は無線で接続された持ち運び可能な端末装置として構成しても良い。
以上が、手動による焦点調節作業であるが、この焦点調節は実際のカット幅測定に先立ちサンプルのウエハを用いて行われるものであり、処理対象のウエハWを実際に測定処理を実行しているときには行うことができない。
2つ目の例として、この焦点調整は手動ではなく自動で行えるよう撮像装置270がオートフォーカス機能を備えるよう構成した場合について説明する。
本変形例において、図5に示す撮像光学機構504は、レンズ群を自動で動かすための不図示のアクチュエータを内蔵している。撮像制御部515は、コントラスト方式によるオートフォーカス(AF)制御が可能なように構成されており、撮像センサ503により得られた撮像画像に基づき決定した制御信号をアクチュエータに対して送信する。
具体的には、撮像制御部515は、撮像センサ503を例えば5fpsのレートの動画撮影ができるよう動作モードを設定し、撮像画像のうち図10で示した5つの切り出し領域から、画像のぼけ度合いを示すAF評価値を取得する。そしてAF評価値に基づき、ぼけ度合いが小さくなる方向に撮像光学機構504のレンズ群を動かす。連続するフレームに対してこの制御を繰り返し、AF評価値よりぼけ度合いが最小になったと判断できたら、合焦状態と判断する。
図12(b)を用いて、本実施形態の測定処理を説明する。既に説明した図12(a)のフローチャートと同様の処理を行うステップについては同じ符号を付しており、ここでは説明を省略する。
本実施形態では、ウエハWの360点の位置それぞれにおいてAF動作を行い焦点を合わせてから、撮像を行うようにする。
ステップS311では、上述したコントラスト方式によるAF制御を行う。そして、ステップS312では、焦点が合った位置における(a)アクチュエータの駆動情報や(b)レンズ位置情報、(c)AF制御開始から合焦状態にいたるまでに経過した時間等を記憶する。その後、既に説明したステップS313の撮像動作に移行する。
以上の制御を行うことにより、全ての撮像位置において良好に焦点調節された上で撮像画像を得ることができ、測定処理を高精度に行うことができる。さらに、ステップS312におけるAF情報(a)(b)(c)を分析することでウエハWの特徴を知ることもできる。例えば、上記AF情報が図16に示したカット幅の例と同様に、角度に応じた周期的な変動を起こしている場合、ウエハWと撮像装置270との距離が周期的に変動している可能性がある。距離が周期的に変動しているということは、ウエハWに反り(歪み)が生じている可能性が高く、その場合は、表示装置609を通じて使用者に注意喚起するよう制御しても良い。
<第1実施形態の変形例2>
上記実施形態の変形例2として、図7の全体フローにおける測定処理又はウエハ処理を追加的に実行する例を説明する。図7のステップS104での測定結果として、カット幅が図16の様な滑らかな曲線を描かず、例えば、数度単位で現れる小さな凹凸を複数個含んでいる場合がある(不図示)。この様な現象は特に処理膜境界1109が径方向に一定でないときに起こるので、処理膜が周方向に一様の幅で除去されず、部分的な膜残りが生じていることを意味する。部分的な膜残りは、ノズル位置設定の精度不足のためではなく、薬液処理の実行時間が不足しているために起こっている可能性が高い。したがって、カット幅の測定結果に小さな凹凸が生じた場合は、もう一度同じ薬液処理を繰り返す制御を行う。これにより、残った膜の上に十分な量の薬液が再び供給されるので、膜残りも容易に除去でき、測定対象であったウエハW自体も良好な処理結果を得ることができる。
具体的には、図7の全体フローのS104での測定処理の後、測定処理装置601の制御部603が図16に示したカット幅のグラフ化を行って凹凸の有無を自動認識する。次に、凹凸が生じている、すなわち膜残りがあると判断したらその旨を制御部18に通知する。そして制御部18は、処理ユニット16を制御して再びステップS102のウエハ処理を実行させる。
また、以上のウエハ処理とともに或いは単独で、例えば、ステップS102のウエハ処理における第1リンス処理(ステップS202)と第2薬液処理(ステップS203)の間において、ステップS103の測定処理を追加的に実行しても良い。これにより、第1薬液処理(ステップS201)によるカット幅を個別に確認することができ、その結果に応じて、その後のノズル位置を調整することができる。或いは上記のような第1薬液処理の追加処理を行って膜残りを除去しても良い。
<第2の実施形態>
第1実施形態では、撮像装置270を使用して偏芯量WDを計測できるようにしたが、この偏芯量WDに基づき、ウエハWの保持位置を自動調整するようにしても良い。本実施形態では、保持位置調整機構を処理ユニット16の内部に設けた場合の動作について説明する。
図18は、本実施形態の処理ユニット16が備える保持位置調整機構を説明するための図である。この機構は、例えば、図2において示した処理ユニット16のハウジング260の内部であって、図3の処理液供給部250A,Bの下方の空間に設けることができる。
図18(a)は、保持位置調整機構1800を上方からみた図である。便宜的にウエハWを点線で記載しているが、ウエハWは保持位置調整機構1800よりも上方にある。
保持位置調整機構1800は、ハンド部1801と、アーム部1802と、支持回転部1803を、を有している。ハンド部1801は円弧形の支持部材であり、保持部210を囲む程度の大きさの円弧形状を有している。そして、その表面にウエハWの裏面に直接的に接触させるための突起部材1804を3つ備えている。ハンド部1801は円弧形状に限るものではなく、保持部210外側から囲む大きさの弧形状(角ばったコの字形状も含む)であれば良い。
アーム部1802は、ハンド部1801と一端において接続してハンド部1801を1つの軸線上に向けて水平に移動させるためのものである。支持回転部1803は、アーム部1802のもう一方の端部と接続され、アーム部1802を支えるとともに不図示のモータを駆動させハンド部1801とアーム部1802とを一体的に矢印1805の方向に回転させる。これにより、ハンド部1801は保持部210を囲う位置(図18(a)において一点鎖線で示す状態)と退避位置(図18(a)において実線で示す状態)とで移動することができる。また、ハンド部1801とアーム部1802を一体的に昇降させることもできる。図18(a)において、二点鎖線はX軸の方向を示しており、図示していないが、撮像装置270もこの直線上に位置している。
図18(b)は、保持位置調整機構1801を横方向からみた側面図である。突起部1804を保持部210の上面の高さよりも上昇させることでウエハに接触して持ち上げることができ、保持部210の高さよりも降下させることで保持部210に受け渡すことができる。また、矢印に示されるように、アーム部1802は、X軸方向に向けて前後に直線移動させ、アーム部1802の位置を前後に直線的に変更することができる。
次に図19及び図20に示すフローチャートを用いて、本実施形態に係る保持位置調整処理を説明する。
図19の全体フローに示すように、本実施形態の保持位置調整処理は、第1の実施形態で説明した図7の全体フローにおいて、ステップS101のウエハ搬入処理の後に追加的に行われるものである。図19においてステップS111の保持調整処理以外の処理は、図7で説明した処理と同様のものであるので、ここでは説明を省略する。以下、ステップS111の詳細について図20のフローチャートを用いて説明する。
図20において、撮像装置270の撮像条件として第1撮像条件を設定し(ステップS401)、ウエハWの第1撮像条件での撮像(ステップS402)、撮像回数の判定(S403)、ウエハWの回転(S404)を、予め設定された撮像回数だけ繰り返す。この処理は、図12に示したステップS301〜ステップS305の繰り返し処理のうち第2撮像条件による撮像(ステップS303)を除外した点を除いて同様な処理なので詳細な説明は省略する。第1の実施形態で述べたように、偏芯量WDを知るためには、ウエハ周縁端1111の位置のみを知ることができれば良いので、第1撮像条件のみでの撮影を行うこととした。
以上の動作を終了したら(ステップS403:Yes)、ステップS405に移行し、360セットの第1撮像画像を用いて、画像解析処理を行う(S405)。そして、その測定結果として、偏芯量WDを決定する(ステップS406)。偏芯量WDを求めるための画像解析処理の詳細は、すでに第1実施形態において図15を用いて述べているのでここでは省略する。ただし、ここで、何回目の撮影でウエハ周縁端1111が最大値及び最小値をとったか、もあわせて記憶しておく。例えば、60回目で最大値をとり、240回目で最小値をとったとすると、保持部210に置かれたとき、ステップS401のときの回転の初期位置から−60度回転させた方向に偏芯量WDのベクトル、すなわち、ずれの方向が向いていたことになる。
次に偏芯量WDに基づき、ウエハWの位置を調整(補正)するステップを開始する。ここからは、図21も参照して、保持位置調整機構1800の動作を説明する。
まず、ウエハWの偏芯の位相を合わせる動作を行う(S407)。ステップS403で360回の撮像を終了したときから保持部210の回転動作がされていないのであれば、保持部210はステップS401のときの回転の初期位置にある。このステップでは、周縁端1111が最大値をとった回転角度だけ、ウエハWを回転させる。上記の例だと、回転の初期位置から60度だけウエハWを回転させる。これにより、偏芯量WDのベクトルの向きとX軸の向きが一致し、保持位置調整機構1800は、X軸方向にウエハWを偏芯量WDだけ平行移動させるという簡単な制御動作のみで適切な位置へとウエハWを調整することができるようになる。
次に、図21(a)の状態にあるカバー部材230(撮像装置270)を昇降機構240により退避位置(図1より上方の位置)に位置させるとともに、カップ昇降機構のリフタ243によりカップ体220を下降させる(ステップS408)。ここではまだ、保持部210はウエハWを吸着保持している(下向き色抜き矢印)。
次いで、図21(b)に示すように、保持位置調整機構1801を作動させ、アーム部1802を回転させながらウエハWとカップ体220の間に進入させ、ハンド部1801をウエハWの下面に位置させる(S409)。そして、その後、保持部210の吸着を停止する(S410)。
そして、ステップS407で決定した偏芯量WDに基づいて、ウエハWの位置調整を行う(S411)。ここではまず、図21(c)に示すように、支持回転部1803は、アーム部1802を上昇させハンド部1801の突起部1804をウエハWの裏面に接触させる。このとき、ハンド部1801は、図18に示したように、ウエハWの下面のうち保持部210との接触領域よりも外側の領域を支持する。さらに、図21(d)に示すように、ハンド部1801とアーム部1802を上昇させ、保持部210とウエハWとを被接触の状態にする。そして、図21(e)に示すように、偏芯量WDに相当するだけアーム部1802を移動させる。
その後、アーム部1802を降下させて、図21(f)のようにウエハWを保持部210に接触させ、吸着を再開し(S412)、さらに、図21(g)に示すように、さらにアーム部1802を降下させて、ウエハWと非接触にする。
そして、図21(h)に示すように、アーム部1802を退避させる(S413)、最後に、昇降機構240によりカバー部材230を下降させるとともに、カップ昇降機構のリフタ243によりカップ体220を上方させ、図2に示す位置に戻すことで、一連の処理が終了する(ステップS414)。
以上説明したように、本実施形態によれば、撮像装置270により撮像された画像に基づき決められたウエハWの偏芯量に応じて、保持部210の中心に対するウエハWの保持位置を調整する保持位置調整機構1800を設け、ウエハWを下面から支持しながらウエハWの保持位置を調整するようにした。保持位置調整機構1800はウエハWの下方に潜り込んで位置調整するので、ウエハWを外周端部の横方向から挟み込んで位置調整する従来の手法に比べて、保持位置調整機構をハウジング内に設置するスペースが削減できる。したがって、装置のフットプリントの増大を招くことなく、良好な調整を行うことができる。また、ウエハWをハンド部1801の突起部材1804で下方向から保持するので、ウエハWの外周端部を損傷させることなく安定して適切に位置調整することができる。さらに、保持部210との接触領域よりも外側の領域の下面を支持しながら調整するので、上方向への持ち上げ量も保持部210から少しだけ浮かせる程度で良くなり、処理ユニット16の構造上、位置調整のためにZ軸(垂直)方向でのスペースを確保する必要がない。また、予めウエハWを回転させて偏芯の向きを特定し、その方向をアーム部1802の直線移動の方向(X軸方向)に合わせるようウエハWを回転させた上で位置調整を行うので、保持位置調整機構の制御を簡単かつ精密なものにすることができる。
<第3の実施形態>
上記実施形態では、測定処理装置601は、測定処理を開始するに先立ちまず撮像装置270の撮像設定を行っているが、これを測定対象のウエハや処理の内容に応じて変更可能にするように構成しても良い。
測定処理の対象となるウエハには、様々な種別のものがある。例えば、水溶性膜や、チタン、アルミ、タングステンといったメタル膜が形成されたウエハ、等である。これらの膜は固有の屈折率や減衰率等を有しているため互いに光の反射特性が異なるので、撮像装置により同一の撮影条件で撮影したとしても、撮像画像に現れるエッジの輝度レベルは異なってくる。
第1実施形態では、図11に示した膜構造において、第2撮像条件として、処理膜境界1109の位置が正確に特定できるように、中間照度の反射光レベルを重視した撮像条件が設定されていた。
ただし、上記のように膜の種別によって光の反射特性が異なるので、中間照度の反射光レベルであっても、相対的に低照度側の中間照度に広い諧調幅を割り当てるほうが精度の良いエッジ検出ができる場合や、逆に高照度よりの中間照度に広い諧調幅を割り当てるほうが精度の良いエッジ検出ができる場合がある。
また、ウエハWのラウンドは下地から形成されているが、そもそもウエハの材質自体が異なってくれば光の反射特性も変わってくるので、第1撮影条件も膜の種別によって変えたほうが良好な検出ができる場合がある。
さらに、膜の種別は同じでも設定されるカット幅の大きさに応じて撮像条件を変えたほうが良い場合もある。
本実施形態では、撮影条件等を含んだ測定用の設定を“画像処理レシピ”と定義して、処理対象ウエハの膜の種別に応じて画像処理レシピを選択するようにする。以下、図22を用いて本実施形態における画像処理レシピについて説明する。
図22(a)は、膜種別と画像処理レシピとの対応関係を示す測定用設定のテーブル2201である。画像処理レシピ2202は、膜の種別2203とカット幅2204に対応してそれぞれ設けられている。このリストは情報処理装置602の記憶部607に予め記憶されている。
本実施形態において、画像処理レシピに含まれる撮像条件は、撮像画像の明るさに反映される条件であり、CCDの感度の設定や露出の設定等がある。また、設定されたカット幅の大きさや撮像条件が変わることにより画像の明暗の細かさが変化してくるのであれば、エッジ検出処理のアルゴリズムもそれらに対応させて変更したほうが良い。したがって、本実施形態では、検出処理のエッジ検出手法や検出のための関連処理(諧調変換等)の手法も変更可能にした。
図22(b)は、本実施形態の画像処理レシピのリストを示すものであり、この画像処理レシピのリスト2205は測定処理装置601の記憶部604に予め記憶されている。
画像処理レシピAは、水溶性膜ウエハの周縁部を幅3mmで除去する処理に対応させて設けられたものであり、ラウンド領域を撮像するための条件2206として第1撮像条件、処理膜境界を撮像するための条件2207として第2撮像条件を用いる。また、エッジ検出処理として2208として、検出処理Aを行うものとした。
水溶性膜ウエハの周縁部を幅2mmで除去する処理では、狭いカット幅を検出するために最適な第3撮像条件と検出処理Bを選択するようにしている。また、アルミやチタンの場合は、水溶性膜ウエハとは下地も膜も光に対する特性が異なるので、最適な撮像条件や画像処理、検出処理ができるような設定にしている。また、膜の種別が未知のものを処理するときのために、標準的な画像処理レシピEも準備するようにした。例えば、第8撮像条件は第1撮像条件と第4撮像条件の中間的な設定値を含む条件、第9撮像条件は第2撮像条件、第3撮像条件、第5撮像条件、第6撮像条件を平均化した設定値を含む条件とする。
本実施形態の処理は、図12に示したフローチャートのステップS301で行われる撮像設定において適用可能である。次に、図23に示すフローチャートを用いて本実施形態における撮像設定の詳細を説明する。
まず、制御装置4において、外部装置からの受信又は操作装置601からの操作入力に応じてウエハ処理レシピが特定され、制御装置4から情報処理装置602へとウエハ処理レシピが送信される。情報処理装置602では制御部606がウエハ処理レシピを取得する(S501)。
次に、取得したウエハ処理レシピの内容を読み出し、処理対象のウエハWの膜種別の情報とエッチングすべきカット幅を特定する(S502)。
制御部605は、ステップS502で特定した膜種別とカット幅を、記憶部606に記憶されている図22(a)の選択テーブルから検索する。今回はこの膜種別とカット幅この組があるので、対応づけられたレシピAを選択する(S503)。
そして、情報処理装置602は選択したレシピAを用いるよう設定指示情報を測定処理装置601に送信する。測定処理装置601の制御部603は、受信した設定指示情報を用いて記憶部604からレシピAを読み出して、撮像条件を撮像制御部515に対して送信する。撮像制御部515は、受信した撮像条件をその後の撮像のために設定する。また、制御部603は、測定処理を行う際の検出処理の設定を行う(S504)。
以上が本実施形態の一例であるが、ステップS501のウエハ処理レシピのなかに膜種別の情報が記載されていない場合は、ステップS502において異なる手法により膜種別の情報を取得しても良い。例えば、光を照射してその反射光を受光することにより膜種別の判定する不図示のセンサをハウジング260内に設けておき、搬入されたウエハWを直接的に検査することにより、制御部603がウエハWの膜の種別を特定するようにしても良い。
以上説明したように、本実施形態によれば、ウエハWの膜の種別に関する情報を取得し、予め記憶部607に記憶された複数の測定用設定の中から、取得した膜の種別に対応する測定用設定を選択し、選択された測定用設定を使用して撮像装置270がウエハWの周縁部を撮影するようにした。これにより、使用者が手間を掛けて撮像条件等の測定用設定を調整することなく、適切かつ迅速に測定処理ができるようになる。
<第4の実施形態>
本実施形態では、情報処理装置601が蓄積する測定処理結果の情報を分析処理し、装置の保守や管理に活用する手法について説明する。
図24は、情報処理装置601の記憶部607に記憶される測定処理結果の管理リスト2400を示している。
この管理リスト2400の情報は、処理対象のウエハWに対して施すべき処理のレシピの記載内容から特定できる情報である処理レシピ情報2401と、測定処理装置601で計測を行う際に特定される測定処理結果情報2402から構成されている。
処理レシピ情報2401としては、ウエハWの識別情報である、ロットID2403、ウエハID2404がある。また、具体的な処理に関係する、膜種別2405、設定されるカット幅2406がある。
測定処理結果情報2402は、第3の実施形態で説明した画像処理レシピ2407、画像処理レシピに基づいて測定処理を行った日付2408、時刻2409が含まれる。また、測定処理を行った結果として360点についてのカット位置の結果の最大値“Max”2410、最小値“Min”2411、平均値“Ave”2412がある。なお、最大値及び最小値だけでなく、360点全ての計測値を記憶するようにしても良い。
情報処理装置601は、記憶部607に、ウエハ1枚の測定処理ごとに撮像画像を記録するためのフォルダと、その撮像の際に用いた撮像装置270の焦点調整情報等の撮像設定を記録するためのフォルダを設けている。測定処理結果情報2402として、撮像画像フォルダのリンク2413と撮像設定情報のリンク2414も記憶する。
次に、以上の測定処理結果の情報リストを用いた具体的な分析処理及び保守管理手法について以下説明する。
まず、ロットID“3342”に関しては、同一のウエハ処理レシピと画像処理レシピAを用いて同一種別のウエハWを25枚連続して測定処理している。これにより、例えば、1ロットのウエハ群についてばらつきなくカット処理できたか否かを確認することができる。
ロットID“3342”とロット“ID3842”は、同一のウエハ処理レシピと画像処理レシピAを用いて同一種別のウエハWを処理しているが、異なる日付において測定処理している。この事例の詳細を図25を用いて説明する。
図25(a)は、縦軸が偏芯量(最大値“Max”−最小値“Min”/2)、横軸が測定処理を行った日付(及び時刻)としたグラフであり、情報処理装置602の制御部606は、管理リスト2400を基にこのグラフを作成することができる。
このグラフは、偏芯量の経時変化を知ることができ、図25(a)の経時変化2501の例では、時間が経過するにしたがって、偏芯量が大きくなっていく様子が示されている。これは、基板搬送装置17を構成する部材の磨耗によりウエハWを正確に搬送できなくなってくること等が一因といえる。
情報処理装置601の制御部606は、経時変化2501のグラフを作成して、制御装置4に送信し、制御装置17は、使用者の要求又は自動的に、第1実施形態で説明した図17の表示画面1700のグラフウインドウ1705に表示させることができる。
また、例えば、予め実験により装置の運用上許容できる偏芯量を第1閾値と決めておき、第1閾値に近づきつつあることを示す結果がでたら、使用者にその旨を自動的に報知するようにしても良い。図25(a)の例では、偏芯量が第1閾値よりも小さい第2閾値を超えた時点で、表示画面1700上において、使用者に基板搬送装置17の確認や交換等の注意喚起を行うよう構成している。なお、第2閾値を超えたか否かだけでなく、第2閾値に至る前の偏芯量の測定結果を複数個抽出し、その複数の値が増加の傾きを有しているか否かを注意喚起の判断条件として追加しても良い。
また、経時変化2502のように、突然、偏芯量が第1閾値を超えた場合は、装置異常が生じている可能性が高いので、表示画面1700上において、警告や装置停止等の報知を行うようにする。
図25(b)では、縦軸が実質的なカット幅を示す平均値“Ave”とカット幅の設定値の差分絶対値、横軸が測定処理を行った日付(及び時刻)としたグラフである。
このグラフは処理液供給部250A,Bによる液吐出位置の精度の経時変化を知ることができ、図25(b)の経時変化2503の例では、時間が経過するにしたがって、液吐出位置の精度が低下していく様子が示されている。これは、処理液供給部250A,Bを構成する部材の磨耗により液吐出の位置を正確に制御できなくなってくること等が一因といえる。この場合も図25(a)と同様に、使用者の要求又は自動的に表示画面1700のグラフウインドウ1705に経時変化2403のグラフを表示させることができる。また、第2閾値を越えたときに注意喚起をすることができる。なお、図25(a)の例と同様に、複数の差分絶対値が増加の傾きを有しているか否かを注意喚起の判断条件として追加しても良い。
また、経時変化2504のように、突然、第1閾値を超えた場合は、装置異常が生じている可能性が高いので、表示画面1700上において、警告や装置停止等の報知を行うようにする。
以下、本実施形態のシステムにおける全体フローを図26に示す。図示するように、図7のフローチャートに対してステップS131の結果分析処理が追加されたものである。したがって、ここではステップS101〜S104の処理の説明は省略する。
以下、ステップS131の結果分析処理の詳細について図27のフローチャートを用いて説明する。
まず、情報処理装置602は、測定処理装置601から測定結果情報を取得する(S601)。ここで取得する情報は、図24で示した測定処理結果情報2402である。
次に、ステップS601で取得した情報を記憶部607に記憶して図24で示した管理リスト2400を作成する(S602)。ここでは、既に処理レシピ情報2401は測定処理前に取得済みなので、該当する処理レシピ情報2401と測定処理結果情報2402との関連付けを行う。既にリストが作成されているのであれば、今回の測定結果情報を追加更新することで管理リスト2400を作成する。
そして、ウエハWの処理の状態を分析する処理として、今回の測定結果の1枚のウエハWについて偏芯量が予め決めた第1閾値を越えているかを確認する(S603)。ここで第1閾値を超えていると判断したら(S604:No)、警告報知を行い(S605)、異常時対応として装置停止等の制御を行う。
また、同様に、ウエハWの処理の状態を分析する処理として、設定値に対する実際のカット幅の差分が第1閾値を超えているか確認し(S603)、ここで超えていると判断したら(S604:No)、警告報知を行い(S605)、異常時対応として装置停止等の制御を行う。
一方、第1閾値を越えていないと判断した場合において、次に、ウエハWの処理の状態を分析する処理として、経時変化の分析を行う(S606)。ここでは、上述したように、偏芯量やカット幅が第2閾値を超えているかを判断し、超えていると判断した場合は(S607:No)、表示画面1700を介した注意喚起等の報知を行う(S608)。
特に異常がなければ、表示画面1700のグラフウインドウ1705に分析結果の報知として作成したグラフを表示する(S609)。なお、グラフの表示はステップS605及びS608の警告又は注意の報知と合わせて行っても良い。
以上説明したように、本実施形態によれば、情報処理装置602が、処理レシピ情報2401と測定処理結果情報2402とからなる管理リスト2400を作成するようにした。そしてこの管理リスト2400に基づき基板処理の状態を分析し、分析結果に応じて、使用者に対して所定の報知を行うようにした。このように、ウエハWの周縁部の膜除去に関する情報を管理することで、基板処理ユニット16を長期的に安定して運用することができる。特に、カット幅や偏芯量から処理液供給部250や基板搬送装置17の不具合や磨耗、劣化状況を知ることができ、適切なタイミングで保守や部材の交換等を行うことができる。
<第5の実施形態>
第1〜第4実施形態では、ウエハ処理の結果又は偏芯量を取得するために、薬液処理を行う前か又は処理を行った後に、測定処理を行うものであった。
一方で、実際に液を供給しているときのウエハ等の状態を確認したいという要求がある。液供給中の状態を評価することができれば処理液の供給量やノズル位置等の調整作業にも反映させることができる。本実施形態では、薬液処理やリンス処理を行っているときに測定処理を行う例について説明する。
図28に、本実施形態における処理ユニット16の平面図を示す。上記第1〜第4の実施形態では、2つの処理液供給部の間に撮像装置270を設け、ウエハW上に薬液が存在しない領域における撮像を行った。本実施形態では、図28に示すように、撮像装置270Aと撮像装置270Bを設け、撮像装置270Aは処理液供給部250AよりもウエハWの回転方向R1の先に設置して処理液の供給されている状態を撮像可能とした。同様に、撮像装置270Bは処理液供給部250BよりもウエハWの回転方向R2の先に設置して処理液の供給されている状態を撮像可能とした。なお、本実施形態は、上記実施形態で述べた図7や図19の全体フローの一部として実施されるので、撮像装置270A及び撮像装置270Bの少なくとも一方はカット幅及び偏芯量等の計測処理等にも用いられるものである。また、本実施形態では第1の実施形態で述べた撮像装置に対しての被液による撮像への影響は無視できる程度に小さいものとする。
本実施形態において図28のように撮像装置を配置した場合の撮像装置270A,Bの撮像範囲とウエハW、及びその上の液の位置関係について図29を用いて説明する。
図29において、領域2901は、撮像装置270Aの撮像範囲を示し、領域2902は、撮像装置270Bの撮像範囲を示す。
図30は、領域2901又は領域2902における撮像装置270、処理ユニット16、及びウエハWの配置関係と薬液又はリンス液の液乗り状態を説明する図である。
図30は、薬液処理を開始した直後の状態を示すものであり、処理膜は除去されておらず、薬液3001が処理膜とラウンド領域の上に乗っている状態を示している。また、到達領域902(905)を画角中心として撮像しており、理論的には、ウエハ処理レシピでのカット幅と、図30の液乗り幅は同じになるはずであり、本実施形態における1つの目的はこの2つの一致の度合いを確認することにある。そのためには、液乗りの内端境界3002の位置及びその状態の変化を適切に撮像する必要がある。
例えば、薬液処理が進行し、処理膜が除去されてくると内端境界3002の位置や厚さが変化してくると予測される。したがって、本実施形態では、静止画の撮影を行うのではなく動画撮影を行うことで、液処理の開始から終了までの液乗り状況を確認可能とした。
なお、回転数や処理液の性質により液の乗り方が異なるので、動画撮影の条件は第1薬液の場合と第2薬液との場合で異なるものとした。撮像条件としては、上記実施形態と同様に処理膜と液乗りの場所との間で良好なエッジ検出が可能になるようなものとする。
次に、本実施形態における撮影を伴う薬液処理を図31のフローチャートを用いて説明する。なお、このチャートにおいて、S201〜S205に関しては、第1実施形態で説明した図8のフローチャートに示したステップと同様のものであるので、説明は省略する。
まず、液の供給を開始する前に、ウエハWを第1動画撮像条件で撮影開始する(S701)。ここでの撮影条件は、第1薬液処理で用いる薬液及び第1リンス処理で用いるリンス液に最適化された撮像条件である。
次に、第1薬液処理(S201)及び第1リンス処理(S202)を開始する。ステップS201及びステップS202を行っている間、撮像装置270は第1動画撮影条件のもと撮影を継続している。この間、測定処理装置601は、撮影された動画像をリアルタイムに制御装置4に送り、制御装置4は、例えば表示画面1700の第1画像ウインドウ1703に動画像を表示させる。
次に撮像装置270の動画撮影を一旦停止し、撮影により得られた動画像を情報処理装置602に送信し、情報処理装置602は動画像の記録処理を行う(S702)。記録処理の詳細については、後述する。
次に撮像装置270は、撮像条件を第2撮像条件に変更して撮影を開始する(S703)。
次に、第2薬液処理(S203)及び第2リンス処理(S204)を開始する。ステップS203及びステップS204を行っている間、撮像装置270は第2動画撮影条件のもと撮影を継続している。この間に、撮影された動画像をリアルタイムに制御装置4に送り、制御装置4は、表示画面1700の第2画像ウインドウ1704に動画像を表示させる。
次に撮像装置270の動画撮影を一旦停止し、撮影により得られた動画像を情報処理装置602に送信し、情報処理装置602は動画像の記録処理を行う(S704)。記録処理の詳細については、後述する。
最後に乾燥処理(S205)を行って、一連の薬液処理を終了する。
以上が本実施形態の薬液処理であるが、ステップS201の薬液処理中において、ウエハWは高速で回転しており、3000rpmで回転している場合は、1秒間に50回転している計算になる。薬液やリンス液の到達領域902(905)は撮影画角に対して理論的には変動しない。ウエハWに図15で説明したような偏芯が生じている場合は、ウエハWのウエハ周縁端1111の位置が図19で示した“変動幅”の間で高速で変動する動きが繰り返される。一般的な動画撮影のフレームレートは30fps程度であるこのため、波乗り幅の正確な撮像と観察は困難になる。この問題を未然に防ぐために、図19のステップS111に示した保持位置調整処理を実行して、偏芯を無くした状態にして、ステップS201の薬液処理を実行することが好ましい。なお、保持位置調整処理は第2の実施形態で説明した手法に限定するものではない。
次にステップS702及びS704の記録処理について説明する。処理中における液乗り幅は、使用者が撮影動画を観察することによって確認できるのみでなく、その後の薬液処理の設定及び制御にフィードバックできれば、さらに好ましい。
本実施形態では、撮影動画を記憶部607に記録するとともに、図24の測定処理結果の管理リスト2400の測定処理結果情報2402に、内端境界3002を追加する。これにより、ウエハごとに、設定されるカット幅2406と実質的な計測カット幅である平均値“Ave”2412と内端境界3002との対比が可能となる。そして対比結果に応じてその後の処理におけるカット幅2406の処理液供給部250A,Bの各ノズルのオフセット値を決める等といったフィードバック設定が可能となる。
内端境界3002の算出方法は、処理膜領域1101と薬液3001の反射光の照度レベルが十分に異なるならば、動画像の各フレームにおいて2つの間の輝度エッジを求めればよい。また、図30のように、薬液3001が乗っている領域では矢印で示す外向きの液流が生じているので、連続する複数のフレームに関してフレーム間差分をとり、差分値の変動量の絶対値の大きさや動き方向が大きく変化する径方向の位置を内端境界3002と推定しても良い。
ここで本実施形態の液乗り状態に関する情報によるフィードバックの一例を説明する。
ステップS201の第1薬液処理は、カット幅3mm、液供給時間が30秒と設定されていたとする。この場合、ノズル位置はカット幅3mmに合わせた位置に配置され、予め決められた第1流量で第1薬液の供給が開始されるが、管理リスト2400を後で参照したところ、平均値“Ave”が3.1mmとなり、ずれが生じていたとする。
本実施形態では、液供給時間である30秒間の動画像をこの情報に関連付けて記録しているので、実際にウエハW上でどのような現象が起きたかを知ることができる。
例えば、動画像を観察すると、処理が進行するに従いウエハW上の処理膜が除去されて薄くなり、20秒が経過したところで3.1mmの領域まで第1薬液が侵入した、という現象を使用者は知ることができる。
使用者はこの現象を受けて、例えば、20秒経過したところで、0.1mmぶんだけノズル位置を外側へ移動させるよう、あるいは20秒経過したところで第1薬液の液量を減らすようレシピを作り直すことができる。これにより、過度に処理膜が除去されることを防ぎ、レシピどおりの結果、平均値“Ave”が3.0mmいう結果が得られるようになる。
使用者による設定のみならず制御装置4による自動制御も可能である。液供給時間が30秒の間、内端境界3002も例えば1秒ごとに記録され続けているとする。情報処理装置602は、管理リスト2400を分析し、20秒経過したときに、内端境界3002がそれまでの記録情報と比較して0.1mmずれたと判断したら、その旨を制御装置4に通知する。制御装置4は、次回のウエハWの処理において、ノズル位置や液量を自動制御するよう処理ユニット16に対して、20秒経過したところで0.1mm分だけノズル位置を外側へ移動させるよう、あるいは20秒経過したところで第1薬液の液量を減らすよう指示を出す。なお、制御装置4は、上記使用者の例と同様にレシピそのものを変更する、あるいは表示装置609を介して。レシピを変更するよう使用者に促す等の対応をとっても良い。
以上説明したように、本実施形態によれば、処理液が供給されている間、ウエハWの周縁部に液が乗っている状態を知ることができる。特に、処理膜と液が乗っている領域の境界を知ることができるので、カット幅や液量等のフィードバック設定のための情報として有効に活用することができる。
以上、本発明に係る第1〜第5の実施形態について説明してきたが、これらの例は、製品用のウエハを処理する際に適用するのみでなく、システムのスタートアップやメンテナンスモード等の特殊な状況おいても適用可能である。また、システム構造は筐体に固定であることは必須ではなく、例えば撮像装置は冶具として準備しておく等、各装置は、運用上必要なタイミングに応じてシステムに接続及び取り外し可能なように構成しておいても良い。また、各実施形態は、第1の実施形態に開示のシステム構成のうち必要な部分を前提として個別に実施可能なものであるが、他の実施形態に開示の構成との並存も可能である。すなわち、複合的な目的を達成するため、第1〜第5の実施形態は、適宜組み合わせて実施することができる。