JP6475223B2 - Wall surface measuring method and wall surface measuring apparatus - Google Patents
Wall surface measuring method and wall surface measuring apparatus Download PDFInfo
- Publication number
- JP6475223B2 JP6475223B2 JP2016256803A JP2016256803A JP6475223B2 JP 6475223 B2 JP6475223 B2 JP 6475223B2 JP 2016256803 A JP2016256803 A JP 2016256803A JP 2016256803 A JP2016256803 A JP 2016256803A JP 6475223 B2 JP6475223 B2 JP 6475223B2
- Authority
- JP
- Japan
- Prior art keywords
- measurement
- laser
- wall surface
- distance
- distance meter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 75
- 238000005259 measurement Methods 0.000 claims description 259
- 230000008569 process Effects 0.000 claims description 44
- 230000008859 change Effects 0.000 claims description 42
- 238000001514 detection method Methods 0.000 claims description 6
- 230000001678 irradiating effect Effects 0.000 claims description 4
- 238000004904 shortening Methods 0.000 claims 1
- 230000007246 mechanism Effects 0.000 description 12
- 230000004048 modification Effects 0.000 description 12
- 238000012986 modification Methods 0.000 description 12
- 238000004891 communication Methods 0.000 description 11
- 238000012951 Remeasurement Methods 0.000 description 10
- 230000002093 peripheral effect Effects 0.000 description 9
- 238000012545 processing Methods 0.000 description 9
- 239000000758 substrate Substances 0.000 description 9
- 230000006870 function Effects 0.000 description 8
- 238000010586 diagram Methods 0.000 description 7
- 230000001965 increasing effect Effects 0.000 description 5
- 230000003028 elevating effect Effects 0.000 description 4
- 238000000691 measurement method Methods 0.000 description 4
- 238000010276 construction Methods 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 238000004804 winding Methods 0.000 description 3
- 230000007423 decrease Effects 0.000 description 2
- 230000004907 flux Effects 0.000 description 2
- 230000000149 penetrating effect Effects 0.000 description 2
- 238000009418 renovation Methods 0.000 description 2
- 230000035945 sensitivity Effects 0.000 description 2
- 238000004441 surface measurement Methods 0.000 description 2
- 229910000976 Electrical steel Inorganic materials 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- FFBHFFJDDLITSX-UHFFFAOYSA-N benzyl N-[2-hydroxy-4-(3-oxomorpholin-4-yl)phenyl]carbamate Chemical compound OC1=C(NC(=O)OCC2=CC=CC=C2)C=CC(=C1)N1CCOCC1=O FFBHFFJDDLITSX-UHFFFAOYSA-N 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 239000004566 building material Substances 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 230000006735 deficit Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 238000010330 laser marking Methods 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000012795 verification Methods 0.000 description 1
Images















Landscapes
- Length Measuring Devices By Optical Means (AREA)
Description
本発明は、建築物などの内壁の寸法を測定する壁面測定方法および壁面測定装置に関する。 The present invention relates to a wall surface measuring method and a wall surface measuring apparatus for measuring a dimension of an inner wall of a building or the like.
リフォームなどの室内の内装変更を行うのに先立って、室内の壁面寸法を測定している。すなわち、壁面寸法の測定は、資材を準備するための事前準備であり、工事前の見積もりの段階で必要になる作業である。通常は、依頼者が複数の業者に相見積もりを取ることが多く、このような作業に多大の時間をかけたとしても必ずしも仕事を正式に依頼されるとは限らないため、このような作業は短時間で終了させることが、営業効率として重要である。しかしながら、正確に見積もらなければ、赤字になることもあるので、短時間で終了させて営業効率を上げることに注視し過ぎると大きな損害に繋がる恐れも潜在している。寸法測定結果に応じて、壁紙をどのサイズおよび量、建材のサイズおよび個数などの材料費の基礎となる見積もりとなり、かつ、その材料費から作業に要する工数(人件費)を決定するのが一般的である。 Prior to making interior changes such as renovation, the wall dimensions of the room are measured. That is, the measurement of the wall surface dimensions is a preliminary preparation for preparing materials, and is an operation required at the stage of estimation before construction. Usually, the client often obtains a phase estimate from multiple vendors, and even if such work takes a lot of time, it is not always officially requested for work. It is important for business efficiency to be completed in a short time. However, if it is not accurately estimated, it may result in a deficit, so there is a potential for serious damage if too much attention is paid to ending up in a short period of time and improving operating efficiency. In general, the size and amount of wallpaper, the size and number of building materials, etc. are used as the basis for material costs, and the number of man-hours (personnel costs) required for the work is determined based on the material costs. Is.
そこで、従来は、メジャーを使って、何人かの作業員が共同して寸法の測定をおこなっていた旧来の作業形態から、レーザ距離計を利用して室内の壁面寸法を測定する装置が提案および実施されている。このレーザ距離計の出現は、リフォーム業者にとっては、寸法測定が一人で行えることから、画期的な装置として近年広く受け入れられつつある。
このような汎用品として広く販売されているレーザ距離計を用いた測定方法は、レーザ距離計からレーザを照射すると、そのスポット位置とレーザ距離計の後部との距離が、レーザ距離計に備えられた表示部に表示されることで測定可能となっている。
そして、このようなレーザ距離計で室内の寸法を測定する場合には、次のような作業を何度も繰り返して測定するのである。例えば、BOSCH社のGLM7000(品番)などの廉価品も最近市場に投入されつつある。
また、特許第4304270号(特許文献1)のようなレーザ距離計を用いた壁面寸法測定方法が知られている。この公報には、レーザ距離計からのレーザを寸法測定に必要な複数個所に、オペレータがマニュアル操作により予めスポット照射し、設定入力する。その後、レーザ距離計が測定位置にレーザを照射してゆき、当該レーザ距離計を原点として測定位置ごとに距離および座標を求める。さらに、求めたい寸法の起点と終点となる2つの測定位置の座標および各測定位置までの距離を基にして三角関数によって両測定位置間の距離を求めている。Therefore, in the past, a device that measures the wall surface dimensions of a room using a laser distance meter was proposed and proposed based on the conventional working form in which several workers jointly measured dimensions using a measure. It has been implemented. The appearance of this laser rangefinder has recently gained wide acceptance as a revolutionary device for remodelers because it can perform dimension measurement alone.
The measurement method using a laser rangefinder widely sold as such a general-purpose product is such that when a laser is irradiated from the laser rangefinder, the distance between the spot position and the rear part of the laser rangefinder is provided in the laser rangefinder. Measurement is possible by displaying on the display.
And when measuring the indoor dimension with such a laser distance meter, the following operations are repeated many times. For example, low-priced products such as BOSCH GLM7000 (product number) are recently being put on the market.
Further, a wall surface dimension measuring method using a laser distance meter such as Japanese Patent No. 4304270 (Patent Document 1) is known. In this publication, a laser beam from a laser distance meter is spot-irradiated in advance by a manual operation at a plurality of positions necessary for dimension measurement, and settings are input. Thereafter, the laser distance meter irradiates the measurement position with laser, and the distance and coordinates are obtained for each measurement position with the laser distance meter as the origin. Further, the distance between the two measurement positions is obtained by a trigonometric function based on the coordinates of the two measurement positions that are the starting and ending points of the dimension to be obtained and the distance to each measurement position.
例えば、柱、ドア枠および窓枠など壁面から突き出た膨出部および部屋の隅などを含む複数の隅角部が存在する。したがって、従来の壁面測定装置は、隅角部を測定位置の起点および始点にしてマニュアルで設定入力する必要があり、作業効率が煩雑になっている。さらに設定入力する箇所が多いので、設定入力の漏れによる測定エラーなどが発生するといった恐れもある。
特に、リフォーム業者の場合には、新築と異なり、内部の正確な図面が無い場合、造作にて室内の壁に固定されているようなテーブルや机や家具なのが存在したりするので、新築と異なりリフォームの場合には、更に、その測定は極めて困難となることがある。For example, there are a plurality of corner portions including a bulging portion protruding from a wall surface such as a pillar, a door frame, and a window frame, and a corner of a room. Therefore, the conventional wall surface measuring apparatus needs to be manually set and input using the corners as the starting point and starting point of the measurement position, and the work efficiency is complicated. Furthermore, since there are many places where settings are input, there is a risk that measurement errors may occur due to omission of setting inputs.
In particular, in the case of a renovation contractor, unlike a new construction, there are tables, desks and furniture that are fixed to the wall of the room by construction if there is no accurate internal drawing. In the case of different reforms, the measurement can be very difficult.
本発明は、上述の問題点に鑑みてなされたものであり、建築物の内壁寸法の測定作業を効率よく行うとともに、寸法を精度よく測定することが可能な壁面測定方法および壁面測定装置を提供することを主たる目的としている。
なお、本発明の目的、課題、および効果(利益)は、特許請求の範囲の記載自体から理解されるものであり、下記の説明により、不当に解釈してはならない。The present invention has been made in view of the above-mentioned problems, and provides a wall surface measuring method and a wall surface measuring apparatus capable of efficiently measuring the inner wall dimensions of a building and measuring the dimensions with high accuracy. The main purpose is to do.
In addition, the objective of this invention, the subject, and an effect (benefit) are understood from description of a claim itself, and should not be unfairly interpreted by the following description.
本発明は、以下のような壁面測定方法を提供する。 The present invention provides the following wall surface measuring method.
本発明の1実施態様に係る壁面測定方法は、以下の構成を有する。
すなわち、内壁の寸法を測定する壁面測定方法であって、
A)レーザ距離計を支軸回りに回転させながら被測定面にレーザを照射し、当該レーザ距離計からレーザ照射された測定位置までの距離を測定する測定過程と、
B)前記測定過程で測定した前回のレーザによる測定位置(測定位置=レーザの照射位置である)から、今回の測定時の測定位置まで前記レーザ距離計を回転させた回転角度を検出する回転角度検出過程と、
C)前記前回と今回の測定過程で取得した2つの測定距離と前記回転角度検出過程で検出した回転角度から測定位置間ごとの距離を求め記憶部に記憶する過程と、
前記(A)の測定過程で得た距離と、(B)の回転角度検出過程で得た回転角度とから、前記(C)の測定位置間を記憶する過程を複数回連続して実行して、壁面の寸法を得る一群のデータとして生成するデータ生成過程と、
を備えたことを特徴とする。The wall surface measuring method according to one embodiment of the present invention has the following configuration.
That is, a wall surface measuring method for measuring the dimensions of the inner wall,
A) A measurement process of irradiating the surface to be measured while rotating the laser distance meter around the support shaft and measuring the distance from the laser distance meter to the measurement position irradiated with the laser;
B) A rotation angle for detecting a rotation angle obtained by rotating the laser distance meter from the previous measurement position (measurement position = laser irradiation position) measured in the measurement process to the measurement position at the time of the current measurement. The detection process;
C) A process of obtaining a distance for each measurement position from the two measurement distances acquired in the previous and current measurement processes and the rotation angle detected in the rotation angle detection process and storing them in a storage unit;
From the distance obtained in the measurement process of (A) and the rotation angle obtained in the rotation angle detection process of (B), the process of storing between the measurement positions of (C) is executed continuously several times. A data generation process for generating a group of data for obtaining the dimensions of the wall;
It is provided with.
この方法によれば、被測定面である内壁の全周の寸法を少なくとも一回の測定で求めることが可能なデータを生成することができる。(キューブ状の室内の場合は、一回の測定で測定することができる可能性があるが、勿論、検証のために数回の回転を行っても良い。また、円錐形の室内の場合や膨出状の壁がある高さから上に形成されている場合には、数回転の測定が必要となる可能性がある。)すなわち、レーザ距離計を支軸回りに少なくとも一回転させる間に被測定面にレーザを間欠的に照射し、取得した測定位置ごとの測定距離および測定位置間ごとの回転角度のデータを取得し、さらに、この取得したデータに基づいて、三角関数を利用することにより、測定距離と回転角度から隣り合う測定位置間の距離を、CPUを含む制御部(電気回路6)によって演算により算出する。この算出したデータは、イメージとして、前回のレーザ照射位置の点から今回のレーザ照射位置の点の間の距離となり、続いて、今回のレーザ照射位置の点と次のレーザ照射位置の点との距離となり、これを随時に点間の回転角度と関連づけて記憶し、最終的には、前記(C)のデータ生成過程において、一連の連続したデータとして全ての点(レーザ照射位置)の互いの間隔の集合体が壁面の寸法として算出されるのである。
したがって、この方法によれば、従来のように、隅角部の位置を考量して内壁の測定範囲を予め決定し、オペレータのマニュアル操作によって当該測定範囲を設定入力する必要がないので、測定作業を効率よく行うことができる。また、隅角部を避けて特定の位置のみを測定するための設定を必要としないので、設定入力ミスによる測定エラーの発生を回避することもできる。According to this method, it is possible to generate data that can determine the dimensions of the entire circumference of the inner wall, which is the surface to be measured, by at least one measurement. (In the case of a cube-shaped room, there is a possibility that it can be measured by a single measurement, but of course, several rotations may be performed for verification. If the bulging wall is formed above a certain height, it may be necessary to measure several revolutions.) That is, while the laser rangefinder is rotated at least once around the spindle To irradiate the surface to be measured intermittently with laser, acquire data of measurement distance for each measurement position and rotation angle for each measurement position, and use trigonometric function based on this acquired data Thus, the distance between the measurement positions adjacent from the measurement distance and the rotation angle is calculated by the control unit (electric circuit 6) including the CPU. This calculated data is the distance between the previous laser irradiation position point and the current laser irradiation position point as an image, and then the current laser irradiation position point and the next laser irradiation position point. It becomes a distance, and this is stored in association with the rotation angle between points as needed. Finally, in the data generation process of (C), all the points (laser irradiation positions) are mutually connected as a series of continuous data. The aggregate of the intervals is calculated as the wall surface dimension.
Therefore, according to this method, it is not necessary to determine the measurement range of the inner wall in advance by taking into account the position of the corner, and to set and input the measurement range by an operator's manual operation, as in the past. Can be performed efficiently. In addition, since setting for measuring only a specific position while avoiding the corner portion is not required, it is possible to avoid occurrence of a measurement error due to a setting input error.
なお、上記方法において、前記レーザ距離計から前記測定位置までの測定距離を隣り合う測定位置ごとに比較し、変化量が所定の変化量から外れる場合、前記前回のレーザによる測定位置から、今回の測定時の測定位置までに回転させる角度のレーザの測定間隔を変更することが好ましい。後述する実施形態においては、前記被測定面に間欠的にレーザを照射してその都度に、レーザ距離計からレーザ照射された測定位置までの距離を測定するように記載しているが、これに限定されず、レーザを連続的に照射しつつ、測定点を間欠的に測定するように構成すれば良い。要は、レーザが間欠的に照射されることが本発明において重要ではなく、測定を所定回転角度だけ回転する毎に測定することが重要となる。この測定間隔が短ければ短い程に小さな膨出部位を、より正確に測定することが可能となる。その理由をより詳しく説明すると、隣り合う測定位置(前回の測定位置と今回の測定位置)で比較した結果、その距離の増加率がそれ以前の隣り合う測定位置の間での増加率とが同じ増加率とならなければ、壁の凹凸が存在すると判定することができるのであり、この場合には、隣り合う測定位置の測定間隔(回転角度量)をより短くすることで、凸の立ち上がりの点を見出して、より正確な凹凸量や凹凸の始まり点をデータとして得ることが可能となるのである。 In the above method, when the measurement distance from the laser distance meter to the measurement position is compared for each adjacent measurement position, and the change amount deviates from a predetermined change amount, the measurement position by the previous laser is It is preferable to change the measurement interval of the laser whose angle is rotated to the measurement position at the time of measurement. In the embodiment described later, it is described that the surface to be measured is intermittently irradiated with a laser and the distance from the laser distance meter to the measurement position irradiated with the laser is measured each time. It is not limited, What is necessary is just to comprise so that a measurement point may be measured intermittently, irradiating a laser continuously. In short, it is not important in the present invention that the laser is irradiated intermittently, and it is important to measure each time the measurement is rotated by a predetermined rotation angle. The shorter the measurement interval, the more accurately the small bulge site can be measured. The reason will be explained in more detail. As a result of comparison between adjacent measurement positions (previous measurement position and current measurement position), the increase rate of the distance is the same as the increase rate between the previous adjacent measurement positions. If the rate of increase does not reach, it can be determined that there is unevenness on the wall, and in this case, by increasing the measurement interval (rotation angle amount) between adjacent measurement positions, Thus, it becomes possible to obtain more accurate unevenness amount and unevenness starting point as data.
繰り返しになるが、レーザ距離計から測定位置までの距離は、壁面が平坦な場合には一定の割合で距離が増加または減少してゆく。しかしながら、測定距離の変化量(例えば、傾き)が所定の変化量から外れる場合は、壁面が平坦でないことを意味するのである。すなわち、このような箇所は隅角部である可能性が高いので、平坦な面を測定する測定間隔と同じ間隔(広め)で測定すると、隅角部の寸法を正確に判断することができない。そこで、この方法によれば、例えば、測定間隔を初期設定よりも短くすることにより隅角部の立直面または曲面に複数回にわたってレーザを照射することが可能になるので、隅角部の寸法のみならず形状を正確に判定することができ、ひいては目的とする壁面の寸法のみを精度よく抽出することが可能になる。 Again, the distance from the laser rangefinder to the measurement position increases or decreases at a constant rate when the wall surface is flat. However, when the change amount (for example, inclination) of the measurement distance deviates from the predetermined change amount, it means that the wall surface is not flat. That is, since there is a high possibility that such a portion is a corner portion, if the measurement is performed at the same interval (wider) as the measurement interval for measuring a flat surface, the dimension of the corner portion cannot be accurately determined. Therefore, according to this method, for example, by making the measurement interval shorter than the initial setting, it becomes possible to irradiate the corner face or the curved surface multiple times. Therefore, it is possible to accurately determine the shape, and thus it is possible to accurately extract only the dimension of the target wall surface.
なお、上記方法において、測定距離の変化量が所定の変化量から外れた場合には、次のような補完処理をすることが好ましい。 In the above method, when the change amount of the measurement distance deviates from the predetermined change amount, it is preferable to perform the following complement processing.
例えば、前記変化量が所定の変化量から外れたことを検知した時点で、レーザ距離計を逆回転させて所定の位置まで戻した後に、測定間隔を短く変更して正転させながら再測定する。 For example, when it is detected that the change amount deviates from a predetermined change amount, the laser distance meter is reversely rotated and returned to a predetermined position, and then the measurement interval is shortened and the measurement is performed again while rotating forward. .
または、前記変化量が所定の変化量から外れたことを検知した時点で、測定間隔を短く変更して所定距離まで逆回転させながら再測定する。 Alternatively, when it is detected that the amount of change deviates from the predetermined amount of change, the measurement interval is shortened and the measurement is performed again while rotating backward to a predetermined distance.
この方法によれば、隅角部など平坦でないと疑わし部分で測定間隔を短く変更して複数回にわたって距離を再測定し、最初の測定時に測定しきれていない部分のプロット用のデータを補完するので、隅角部を精度よく判定可能となり、ひいては、目的とする内壁面の寸法のみを精度よく抽出可能になる。 According to this method, the measurement interval is shortened at a part that is not flat, such as a corner, and the distance is remeasured multiple times, and the data for plotting the part that cannot be measured at the first measurement is complemented. Therefore, the corner portion can be determined with high accuracy, and only the intended inner wall surface dimension can be extracted with high accuracy.
また、上記方法において、前記変化量が所定の変化量から外れたことを検知した時点で、当該測定時点の測定位置と前回の測定位置との間で、距離が最大となる位置を求めるまで、測定間隔を変更しながら複数回にわたって再測定することが好ましい。 Further, in the above method, when it is detected that the amount of change deviates from a predetermined amount of change, between the measurement position at the measurement time point and the previous measurement position, until the position where the distance is maximum is obtained, It is preferable to perform remeasurement multiple times while changing the measurement interval.
測定時点の測定位置と前回の測定位置との間に隅角部が含まれる場合、隅角部の起点となる位置までの測定距離が最大となる。したがって、この方法によれば、測定距離が最大となる位置を求めているので、隅角部の起点を特定することができ、当該部位から終点までを求めることにより、その形状を特定することもできる。 When a corner portion is included between the measurement position at the time of measurement and the previous measurement position, the measurement distance to the position that is the starting point of the corner portion is the maximum. Therefore, according to this method, since the position where the measurement distance is maximum is obtained, the starting point of the corner portion can be specified, and the shape can be specified by obtaining from the part to the end point. it can.
さらに、上記方法において、前記被測定面で囲われた空間内に複数台のレーザ測定計を配備し、各レーザ距離計を一回転させながら当該被測定面にレーザを間欠的に照射し、レーザ距離計ごとに取得した距離と回転角度から測定位置間ごとの距離を求め、レーザ距離計ごとに求めた測定位置間の距離をまとめてプロット用の一群のデータとして記憶部に記憶するように構成してもよい。 Further, in the above method, a plurality of laser measuring meters are provided in a space surrounded by the measured surface, and the laser measuring device is intermittently irradiated with the laser while rotating each laser distance meter once. The distance between the measurement positions is obtained from the distance and the rotation angle acquired for each distance meter, and the distance between the measurement positions obtained for each laser distance meter is collectively stored in the storage unit as a group of data for plotting. May be.
この方法によれば、例えば、複数本の柱の膨出したビルやマンションのように広くて死角の多い一室に複数台のレーザ距離計を配備し、個々のレーザ距離計によって被測定面までの距離を測定してゆくことにより、あるレーザ距離計で距離を測定できない死角部分を他のレーザ距離計によって測定することができる。したがって、各レーザ距離計によって取得した測定データから求めた測定位置間の距離をまとめて記憶し、これら複数台分のデータを読み出して合成することにより、死角の多い部屋であっても各レーザ距離計による一度の測定で壁面寸法を効率よく、かつ、精度よく求めることができる。 According to this method, for example, a plurality of laser rangefinders are arranged in a room with a large number of blind spots such as buildings and condominiums in which a plurality of pillars are bulged, and the surface to be measured is measured by each laser rangefinder. By measuring this distance, a blind spot portion where a distance cannot be measured with a certain laser distance meter can be measured with another laser distance meter. Therefore, the distance between the measurement positions obtained from the measurement data obtained by each laser rangefinder is stored together, and the data for each of these multiple units is read out and synthesized, so that even in a room with many blind spots, each laser distance The wall surface dimensions can be obtained efficiently and accurately by a single measurement with a meter.
なお、本発明は、上記構成以外に、以下の構成も開示している。 The present invention also discloses the following configuration in addition to the above configuration.
内壁の寸法を測定する壁面測定装置であって、
被測定面に向けてレーザを照射し、該レーザの照射の方向を、前記内壁に連なる床面に対して回転可能に支承され、且つ、前記回転の中心と前記被測定面間の距離を測定するレーザ距離計と、
前記レーザ距離計によって測定した距離を記憶する記憶部と、
前記レーザ距離計を床面に対して略並行に回転させる駆動機構と、
以下の処理を実行する制御部と、を有する、
前記駆動機構によって前記レーザ距離計を前記支軸回りに回転させながら前記被測定面の所定の測定位置までの距離を間欠的に測定し、
前回の測定位置から今回の測定時の測定位置まで回転した前記レーザ距離計の回転角度を求め、
取得した前記測定距離と前記回転角度から測定位置間ごとの距離を求め、壁面長さをプロットするための一群のデータとして生成し、当該データを前記記憶部に記憶させる、
ことを特徴とする。A wall surface measuring device for measuring the dimensions of an inner wall,
A laser is irradiated toward the surface to be measured, and the direction of the laser irradiation is rotatably supported with respect to the floor surface connected to the inner wall, and the distance between the center of rotation and the surface to be measured is measured. A laser rangefinder to
A storage unit for storing a distance measured by the laser distance meter;
A drive mechanism for rotating the laser distance meter substantially parallel to the floor surface;
A control unit that executes the following processing,
While intermittently measuring the distance to the predetermined measurement position of the surface to be measured while rotating the laser distance meter around the support shaft by the drive mechanism,
Obtain the rotation angle of the laser distance meter that has rotated from the previous measurement position to the measurement position at the time of the current measurement,
Obtain the distance for each measurement position from the acquired measurement distance and the rotation angle, generate a group of data for plotting the wall length, and store the data in the storage unit,
It is characterized by that.
この構成によれば、制御部によって駆動機構を回転制御し、レーザ距離計を支軸回りに一回転させる間に、被測定面の全周にレーザを間欠的に照射して測定位置ごとの距離を測定するとともに、間欠的に測定される隣り合う測定位置間の回転角度を求める。また、制御部は、隣り合う測定位置ごとの各距離と回転角度に基づいて、例えば三角関数を利用して測定位置間の距離を求めることができる。つまり、制御部は、測定位置間の距離を被測定面の全周に沿って取得するので、被測定面の全周をプロット可能な複数個に分割された寸法を一群のデータとして生成して記憶部に記憶させている。したがって、一回の測定で取得したデータを利用して被測定面の任意の範囲での寸法を求めることが可能になる。 According to this configuration, while the rotation of the drive mechanism is controlled by the control unit and the laser distance meter is rotated once around the support shaft, the laser is intermittently irradiated to the entire circumference of the surface to be measured, and the distance for each measurement position. And a rotation angle between adjacent measurement positions measured intermittently is obtained. In addition, the control unit can obtain the distance between the measurement positions based on, for example, a trigonometric function based on each distance and rotation angle for each adjacent measurement position. In other words, since the control unit acquires the distance between the measurement positions along the entire circumference of the measurement target surface, the control unit generates a plurality of dimensions divided into a plurality of data that can plot the entire circumference of the measurement target surface. It is stored in the storage unit. Therefore, it is possible to obtain the dimensions of the surface to be measured in an arbitrary range using the data acquired by one measurement.
上記構成において、前記制御部は、さらに、測定位置間の距離の変化量を比較し、当該変化量が所定の変化量から外れるか否かを判定し、
判定の結果、変化量が所定の変化量から外れる場合、前記駆動機構を逆回転させて前記レーザ距離計を所定の位置まで戻し、測定間隔を変更した後に正転させて再測定させるよう構成することが好ましい。In the above configuration, the control unit further compares the amount of change in the distance between measurement positions, determines whether or not the amount of change deviates from a predetermined amount of change,
As a result of the determination, if the amount of change deviates from the predetermined amount of change, the drive mechanism is rotated in the reverse direction to return the laser distance meter to a predetermined position, and after changing the measurement interval, it is configured to rotate forward and remeasure. It is preferable.
この構成によれば、制御部は、変化量が所定量から外れた場合に平坦でない部分を隅角部として判定し、当該隅角部を前回の測定間隔よりも、例えば短い間隔で再測定してデータを補完し、当該隅角部の寸法および形状を特定することができる。 According to this configuration, when the amount of change deviates from the predetermined amount, the control unit determines a non-flat portion as a corner portion, and remeasures the corner portion, for example, at an interval shorter than the previous measurement interval. Thus, the data can be complemented and the size and shape of the corner can be specified.
また、上記構成において、前記記憶部に記憶された前記データを読み出し、壁面全周を分割した長さを繋げて連続表示する表示装置と、
前記表示装置に連続表示された長さから指定した範囲の寸法を算出する演算処理装置と、を備えることが好ましい。Further, in the above configuration, a display device that reads the data stored in the storage unit and continuously displays the data by connecting the lengths obtained by dividing the entire circumference of the wall surface;
It is preferable to include an arithmetic processing unit that calculates a dimension in a specified range from a length continuously displayed on the display device.
この構成によれば、制御部によって取得されたプロット用のデータを利用し、壁面全周を分割した長さを繋げて表示装置に連続表示し、当該連続表示された長さから任意に範囲を指定して目的とする寸法を精度よく求めることができる。 According to this configuration, the plotting data acquired by the control unit is used, the lengths obtained by dividing the entire circumference of the wall surface are connected and continuously displayed on the display device, and the range can be arbitrarily set from the continuously displayed length. The target dimension can be determined with high accuracy.
本発明に係る壁面測定方法および壁面測定装置によれば、建築物の室内寸法の測定作業を効率よく行うとともに、目的とする寸法を精度よく測定することができる According to the wall surface measuring method and the wall surface measuring apparatus according to the present invention, it is possible to efficiently measure the indoor dimensions of a building and accurately measure the target dimensions.
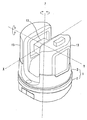
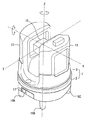
壁面測定装置1は、図1および図2に示すように、装置本体2と回動体3とを備えている。装置本体2は、三脚4に水平に支持されている。 As shown in FIGS. 1 and 2, the wall
装置本体2は、図3に示す第1モータ5(例えばパルスモータ)および当該第1モータ5を駆動させる内部電源としての電池(2次電池)を内蔵している。この第1モータ5の回転軸が、回動体3に連結されている。したがって、図2に示すように、第1モータ5の駆動によって回動体3が、回転軸Z回りに回転するよう構成されている。なお、装置本体2に電池を内蔵しているが、ACアダプタによる外部からの給電によっても第1モータ5が駆動可能に構成されている。 The apparatus main body 2 includes a first motor 5 (for example, a pulse motor) shown in FIG. 3 and a battery (secondary battery) as an internal power source for driving the
また、装置本体2には、図3に示すように、制御用の電気回路6(制御部)を備えている。電気回路6は、装置全体2を制御するCPU7、処理プログラムを格納したROM8、データを一時的に格納するRAM9、および後述するレーザ距離計10から出力された距離データを受信したり、或いは外部のパーソナルコンピュータ11(以下、適宜に(「PC11」と称す)にデータを送信および受信したりする通信部12などから構成されている。なお、通信部12とPC11の通信は、有線LANであってもよいし、或いは無線LANであってもよい。なお、CPU7は、本発明の制御部に相当し、RAM9は、本発明の記憶部に相当し、PC11は、本発明の表示装置および演算処理装置に相当する。 Further, as shown in FIG. 3, the apparatus main body 2 includes a control electric circuit 6 (control unit). The electric circuit 6 receives distance data output from a
回動体3は、円柱状の底部から立設された左右一対の支持体13を備えている。当該支持体13の間でレーザ距離計10が、図4に示す第2モータ14の回転軸と自由軸によって左右から軸支され、水平軸Y回りに回転可能にされている。 The
レーザ距離計10は、被測定物に照射したレーザの反射光の強度に基づいて測定距離を算出して出力する。なお、レーザ距離計10としては、例えば、ライカ システムズ社製の「Leica 3D Disto」やボッシュ株式のレーザ距離計など種々の物を使用することができる。 The
したがって、回動体3は、レーザ距離計6を水平軸Y回り回転させて停止し、任意の角度でレーザを被測定面に照射し、レーザ距離計6を原点(回転中心を原点として設定している)として被測定面の測定位置までの距離を測定可能に構成されている。つまり、レーザ距離計6は、回転体3に固定される結果、設置される床又は床に設置する固定台である三脚4に対してレーザ距離計6は、回転可能に支承されている。 Accordingly, the
<測定処理1>
次に、上記壁面測定装置1によって部屋の内壁を測定する一連の処理について図を参照して説明する。<
Next, a series of processes for measuring the inner wall of the room by the wall
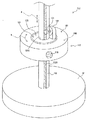
図4に示すように、部屋の略中央に三脚4を設置し、当該三脚4に壁面測定装置1を装着する。電源ボタンを押圧すると装置本体2に備わった水準器の機能が作動し、当該水準器に従って装置本体2を水平に設定する。水平度は、装置本体2だけである程度まで調整した後に、三脚4の脚部を伸縮させ、三脚4の高さで微調整を行う。 As shown in FIG. 4, a
次に、PC11と装置本体1との通信接続を行う。接続が完了すると、PC11から測定間隔を設定する。その後、レーザ距離計10から壁面Wにレーザを照射し、測定開始位置の高さを設定する。これら初期設定が完了すると、PC11または壁面測定装置1を操作して測定を開始する。 Next, communication connection between the
この開始操作に伴って、装置本体2の上で回動体3が時計方向に360度の回転を開始する。この回転する間に予め設定した間隔でレーザ距離計10から壁面Wにレーザを間欠的に照射し、各測定位置X1〜Xnまでの測定距離が、RAM9に記憶される。また、測定開始位置X1から次の測定位置X2にレーザを照射するようにレーザ距離計10が回転するとき、CPU7が第1モータ5の駆動時のパルス数をカウントし、測定距離とパルス数がRAM9に記憶される。 With this starting operation, the
測定が2回目以降になると、CPU7は、プロット用のデータの生成を開始する。例えば、図5に示すように、レーザ距離計10を原点位置Aとし、壁面W1にレーザを照射した前回の測定位置X1と現時点の測定位置X2を底面とし、前回の測定距離L1と現時点の測定距離L2で挟む角度θ1から測定位置間の距離d1を求める。角度θ1は、第1モータ5のパルス数から求めることができる。すなわち、角度θ1は、設定した第1モータ5の回転角度と一致するので、本実施形態では、常に一定に保たれている。なお、角度θ1は、回動体3の回転角度をロータリーエンコーダのような検出器によって検出するように構成してもよい。When the measurement is performed for the second time and thereafter, the
上述のように取得する測定距離L1、L2および回転角度θ1からd1は、三角関数を用いてd12=L12+L22−2L1L2cosθ2により求めることができる。The measurement distances L1 and L2 and the rotation angle θ1 to d1 acquired as described above can be obtained by d1 2 = L1 2 + L2 2 −2L1L2 cos θ2 using a trigonometric function.
CPU7は、測定位置間の距離d1を求めると、図6に示すように、レーザ距離計10を360度回転させる間に、各測定位置間(2点間)の距離を求めて順にプロット用の一群のデータとして生成しながら逐次にRAM9に記憶してゆく。測定完了後に、CPU7は、RAM9に記憶したデータをPC11に送信して一連の処理を終了する。 When obtaining the distance d1 between the measurement positions, the
この構成によれば、部屋の内壁面W1〜W4の全周の長さを一回の測定で求めることができる。すなわち、レーザ距離計10を一回転させる間に壁面W1〜W4にレーザを間欠的に照射し、取得した測定位置ごとの測定距離および隣り合う測定位置間ごとの回転角度を求めることができ、さらに、三角関数を利用して隣り合う測定位置ごとの測定距離と回転角度から隣り合う測定位置間の距離を求めることができる。換言すれば、各測定位置間の距離d1、d2、……は、壁面W1〜W4の全周の長さを複数個に分割したプロット用の一群のデータとして生成される。したがって、PC11に一群のデータをプロットして表示し、範囲を指定することにより、任意の範囲の寸法を求めることができるので、従来のように、オペレータのマニュアル操作によって測定範囲を詳細に設定入力する必要がないので、測定作業を効率よく行うことができる。また、隅角部を避けて目的とする測定位置のみを測定する必要がないので、測定エラーをなくすこともできる。なお、測定の開始位置および終了位置は、従来のように隅角部に限定されず、壁面の平坦な位置など任意の位置に設定できることは言うまでもない。 According to this structure, the length of the perimeter of the inner wall surfaces W1-W4 of a room can be calculated | required by one measurement. That is, the laser can be intermittently applied to the wall surfaces W1 to W4 while the
<測定処理2>
部屋の内壁を360度測定する過程で、室内には、単なる角部、或いは、図4に示す柱21〜24などによる隅角部が存在する。本実施形態では、この隅角部を判定して、精度よく測定する形態について説明する。<Measurement process 2>
In the process of measuring the inner wall of the room at 360 degrees, there are mere corners or corners such as the
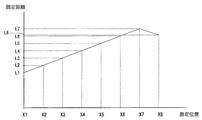
図4に示す平坦な壁面を測定している間、図7に示すように、測定位置X1〜X7まで各測定距離L1〜L7は一定の割合で増加し、変化量を示す各測定位置間の傾が、一定であることが分かる。しかしながら、隅角部21の測定位置X8では、距離L8が距離L7より短くなっており、変化量を示す傾きが斜め下がりに変化している。 While measuring the flat wall surface shown in FIG. 4, as shown in FIG. 7, each of the measurement distances L <b> 1 to L <b> 7 increases at a constant rate to the measurement positions X <b> 1 to X <b> 7, and between the measurement positions indicating the amount of change. It can be seen that the inclination is constant. However, at the measurement position X8 of the
CPU7は、測定ごとに変化量をモニタしており、変化量が一定でなくなった測定時点で、変化量が一定であった最終時点の測定位置X7まで回動体3を逆回転させて戻す。 The
CPU7は、現状の測定間隔よりも短い測定間隔に変更する。すなわち、第1モータ5のパルス数を調整し、レーザ距離計10を微小角度で回転させるように変更する。 The
その後、回動体3を正転させて測定位置X7からレーザ距離計10によって再測定を開始する。すなわち、図8に示すように、微小間隔で測定位置ΔX71からΔX74の順に再測定してゆく。CPU7は、測定した値を前回の変化量を検出した測定位置X7からX8までの間を補完する値としてRAM9に記憶してゆく。 Thereafter, the
CPU7は、再測定の間も変化量をモニタしている。例えば、図4に示すように、測定位置X8からX10までは隅角部を含むので、CPU7は、この間は微小間隔で測定し、測定位置X10からX11で変化量が一定に戻ると、測定間隔を当初設定値に戻して測定を継続する。その後、各壁面W1〜W4に対して、レーザが垂直に照射された場合(図4の測定位置X14)、その時点から変化量が増加または減少するが、隅角部21〜24とは異なり変化量は一定となるので、測定間隔は、当初設定のままとなる。 The
以後、CPU7は、隅角部を判定するごとに回動体3を所定位置まで戻すとともに測定間隔を変更して再測定し、変化量が一定になると測定間隔を初期設定に戻しながら測定を繰り返し、部屋の内壁を360度にわたって測定し、プロット用の一群のデータをPC11に送信して一連の処理を終了する。 Thereafter, the
なお、この測定処理2において、変化量が変化した時点で、前回の測定位置X7までレーザ距離計10を戻して再測定を一回行っているが、当該測定位置X7とX8の間で再測定を複数回行ってもよい。このとき、再測定ごとに測定間隔を変更して測定した距離が最大となる位置を求める。 In this measurement process 2, when the amount of change changes, the
この構成によれば、測定位置間の変化量が変化した領域を平坦でない隅角部であるとCPU7が判定するので、CPU7は、変化量が変化する前の測定位置に回動体3を戻すとともに、測定間隔を短く変更してレーザ距離計10によって当該部分を再測定させるので、隅角部の寸法および形状を精度よく判定可能となる。特に、測定位置間X7とX8で複数回行う再測定ごとに測定間隔を変更して測定距離が最大となる位置を求めることにより、隅角部の起点を特定することができるので、隅角部の形状および大きさをより精度よく判定することができる。その結果、隅角部を除く平坦な壁面のみを精度よく抽出することが可能になる。 According to this configuration, since the
なお、本発明は、上記実施形態に限定されず、以下のような構成であってもよい。 In addition, this invention is not limited to the said embodiment, The following structures may be sufficient.
(1)上記実施形態では、1台の壁面測定装置1を利用して矩形の1部屋の壁面の全周にわたって測定していたが、正方形や長方形でない異形なレイアウトの部屋、部屋の大きさ隅角部の位置に応じて、複数台の壁面測定装置1を部屋ごとに設置し、個々に測定するように構成してもよい。 (1) In the above-described embodiment, the measurement is performed over the entire circumference of the wall surface of one rectangular room using the single wall
或は、図9に示すように、2台の三脚4を2部屋のそれぞれに設置し、当該三脚4の間に跨るようにリニアガイド20を設置し、当該リニアガイド20の上の可動台に壁面測定装置1を装着して移動させ、部屋ごとに測定するように構成してもよい。 Alternatively, as shown in FIG. 9, two
上記の複数台の壁面測定装置1を利用する場合および1台の壁面測定装置1を移動させる構成のいずれにおいても、部屋ごとに測定して取得したプロット用のデータのそれぞれをPC11に送信し、PC11側で2部屋分のデータを合成させるように構成する。すなわち、図9に示す測定原点Aで測定した壁面W1〜W3までのプロット用のデータと、測定原点Bで測定した壁面W4〜W6までのプロット用のデータを抽出して合成し、連なる2部屋分のデータを纏めて記憶する。 In both the case where the plurality of wall
この構成によれば、正方形および長方形でない異形なレイアウトの部屋、柱などによって死角が生じる部屋の場合、およびホールなどの広い部屋の場合など各壁面全周の寸法データの基となる一群のプロット用のデータを取得し、これら複数の一群のデータから必要な部分のデータを抽出して合成することによって、部屋全周のプロット用のデータを精度よく生成することができる。 According to this configuration, for a group of plots that are the basis of the dimensional data for the entire circumference of each wall surface, such as a room with an irregular layout that is not square or rectangular, a room where a blind spot is caused by a pillar, or a large room such as a hall The data for the plot of the entire circumference of the room can be generated with high accuracy by extracting the necessary data from the plurality of groups of data and combining them.
(2)上記実施形態では、壁面測定装置1によって取得した測定データを通信によってPC11に送信していたが、USBメモリなどのメモリ媒体に壁面測定装置1の測定データを記録させて持ち出し可能にしてもよい。 (2) In the above embodiment, the measurement data acquired by the wall
(3)上記実施形態では、レーザ距離計10の角度を固定して水平に一回転させていたが、図10に示すように、360度回転するごとにレーザ距離計10の上下角を微小角度で変更してゆき、壁面の高さ方向の高さH1〜H4の位置で水平にレーザ距離計10を水平方向に回転させて複数回にわたって測定してもよい。或いは、レーザ距離計10を微小角度で逐次に変更し、壁面にレーザを螺旋状に照射しながら複数回にわたって壁面全周を測定するように構成してもよい。 (3) In the above embodiment, the angle of the
この構成によれば、壁面の高さの異なる位置でのプロット用のデータが取得されるので、水平方向と高さ方向の2次元のデータを取得することができる。したがって、壁面に応じた壁紙の幅寸法と高さ寸法から所定範囲の面積も求めることが可能になる。 According to this configuration, data for plotting at different positions on the wall surface is acquired, so that two-dimensional data in the horizontal direction and the height direction can be acquired. Therefore, it is possible to obtain an area in a predetermined range from the width dimension and height dimension of the wallpaper according to the wall surface.
(4)上記実施形態では、壁面が床に対して垂直な部屋を例にとって説明したが、天井が床よりも面積が小さく、壁面が傾斜しているような部屋の当該壁面の測定にも適用することができる。なお、このような部屋の場合、フロアの平面図またはレイアウト図は、床面を基準にして作成されているので、床面に可能な限り近い位置で壁面までの距離を測定する必要がある。また、壁面が傾斜しているので、高い水平度を保った状態でレーザ距離計10を360度回転させなければ、測定距離の誤差が垂直な壁面の測定時よりも大きくなる。したがって、このように壁面が傾斜している場合、例えば、次のような実施形態が好ましい。 (4) In the above embodiment, a room whose wall surface is perpendicular to the floor has been described as an example. However, the present invention is also applicable to measurement of a wall surface of a room where the ceiling is smaller than the floor and the wall surface is inclined. can do. In the case of such a room, the floor plan or layout diagram is created based on the floor surface, so it is necessary to measure the distance to the wall surface as close as possible to the floor surface. Further, since the wall surface is inclined, if the
図11に示すように、低背な三脚4の支持台に壁面測定装置1を装着する。その後、装置本体2の電源をオンにして装置本体2の水準機能によって自動で大凡の水平度を調整する。さらに、円型気泡管の水準器を目視しながら短軸からなる脚部4Aの先端側のネジに螺入された先端部4Bを回して壁面測定装置1が360度回転している間も水平になるように微調整する。 As shown in FIG. 11, the wall
或は、株式会社TJMデザインのレーザ墨出し器(型番GZAN−KYR)の三脚部に壁面測定装置1を装着し、当該三脚部の自動水準機能によって水平度を調整し、さらに脚部に螺入された先端部を回して高さの微調整を行なってもよい。 Alternatively, the wall
この構成によれば、床面近くで水平度を精度よく保った壁面測定装置1によって床面と略平行、かつ、壁面と床面が交差するフロアラインまたはフロアラインに極力近い位置にレーザを照射することができるので、傾斜した壁面であってもフロアの平面図と一致した寸法データを精度よく取得することができる。 According to this configuration, the wall
なお、床面に極力近い壁面高さにレーザを床面と平行にして照射したい場合、例えば、次のように実施してもよい。回動体3からレーザ距離計10を分離し、ロボットアームの先端に装着し、当該ロボットアームによって床面に近接する位置までレーザ距離計10を下降させる。この状態でロボットアームを縦軸回り回転させながら、レーザ距離計10によって距離を測定させればよい。測定結果は、無線によってレーザ距離計10から装置本体2に送信すればよい。 In addition, when it is desired to irradiate the laser with a wall surface height as close as possible to the floor surface in parallel with the floor surface, for example, the following may be performed. The
(5)上記実施形態において、壁面測定装置1からPC11に転送されたプロット用のデータから幅寸法を決める位置と高さを決める位置を設定すれば、PC11が、水平方向および高さ方向の測定位置間の距離をそれぞれ算出し、当該距離から設置位置間の面積を求め、さらに当該面積を被覆可能なサイズを有する規格品の壁紙をPC11に予め記憶したデータベースまたはネットワークを介して接続した外部のサーバに記憶したデータベースから抽出するように構成してもよい。 (5) In the above embodiment, if the position for determining the width dimension and the position for determining the height are set from the plotting data transferred from the wall
(6)上記図10に示した構成では、レーザ距離計10から照射されるレーザの上下角を変更することより壁面の異なる高さ位置で測定する場合について述べたが、これに限られるものではなく、レーザ距離計10の上下角を変更する構成(図10)に代えて、例えば図12に示すように、レーザ距離計110の高さを所定間隔で変更してゆき、各高さH1、H2、H3、……Hxでそれぞれレーザ距離計110を水平に回転させることにより壁面距離を測定する構成としてもよい。 (6) In the configuration shown in FIG. 10, the case where measurement is performed at different height positions on the wall surface by changing the vertical angle of the laser irradiated from the
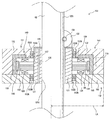
具体的には、図13に示すように、壁面測定装置100は、平板状の台座101の上面に円柱形状の支柱102が固定されており、この支柱102には、レーザ距離計110を支持する本体部112が上下移動可能に支持されている。 Specifically, as shown in FIG. 13, in the wall
本体部112は、支柱102の周側面に沿って当該支柱102の長手方向(矢印aで示す上下方向)に摺動可能に支持される円筒形状のステータ121と、当該ステータ121の外周面に対してベアリング122A、122B(図14)を介して水平面内で矢印b方向に回転可能に支持されたロータ151とを有する。 The
ロータ151には、レーザ距離計110が搭載されており、ロータ151の外周面から壁面に対して水平方向にレーザを照射する。レーザ距離計110は、上記実施形態において用いたレーザ距離計10と同様にして、被測定物(壁面)に照射したレーザの反射光の強度に基づいて測定距離を算出して出力するものである。 A
本体部112の駆動機構について説明する。図13において、本体部112のステータ121は、中心部分が上下方向に貫通した円筒形状を有しており、貫通部121Aに支柱102が挿入されている。ステータ121の内径は、支柱102の外径よりも僅かに大きく形成されていることにより、ステータ121は、支柱102の周側面に対してその長手方向に摺動可能となっている。 A drive mechanism of the
支柱102の周側面にはその長手方向にラックギア102Aが設けられており、このラックギア102Aには、ステータ121に設けられた昇降用のピニオンギア131が歯合されている。ピニオンギア131は、ステータ121に搭載された昇降用モータ132によって回転し、これにより、昇降用モータ132の回転方向に応じて、ステータ121を昇降させることができる。なお、昇降用モータ132として、パルスモータ(ステッピングモータ)等が用いられる。 A
図14に示すように、ステータ121の外周面には例えば積層珪素鋼鈑などからなる固定子磁極123が固定されており、この固定子磁極123には所定極数の固定子巻線124が巻回されている。固定子巻線124は、ピン127を介して、ステータ121に設けられた基板125のドライバ回路165A(図15)に接続されている。ドライバ回路は、基板125に設けられた電気回路166(図15)に接続されている。電気回路166は、通信部12(図15)を介して外部のコンピュータ(PC11(図15))に接続されている。なお、電気回路166及びパルスモータ等への電源供給ラインは、ステータ121に設けられた貫通孔128を介して、ステータ121の下方から基板125へ引き込む構成とすることにより、電源供給ラインがレーザ距離計110のレーザ光路を遮ることを回避することができる。因みに、電源供給の方法としては、電源ラインを接続する方法に代えて、例えば、ステータ121上にバッテリを搭載するようにしてもよい。 As shown in FIG. 14, a stator
一方、ロータ151は、上面部の中心に貫通孔152Aを有し底面部が開口する円筒形状のロータハウジング152を有し、このロータハウジング152の底部開口は、中心部に貫通孔153Aを有する円板形状の底板153によって閉塞されている。 On the other hand, the
ロータハウジング152の内周面にはロータヨーク155が設けられており、このロータヨーク155の内周面には、円環状のロータマグネット156が設けられている。ロータマグネット156は、周方向に交互に異なる方向に着磁されており、固定子磁極123の固定子磁極歯(図示せず)との間には均一なエアギャップが設けられている。 A
これにより、ロータマグネット156は、内側に固定子を有する円筒型のパルスモータ(ステッピングモータ)を構成する。基板125のドライバ回路165A(図15)は、固定子巻線124の各極に対して、順次所定のタイミングで電流を流すことにより、ロータ151を回転させることができる。 Thus, the
ロータヨーク155の一部には切欠き(図示せず)が設けられており、この切欠きから漏洩する磁束を、所定の回転位置に設けられた磁束検出器(図示せず)によって検出することで、ロータ151(ロータマグネット156)の回転位置を判断することができるように構成されている。 A part of the
PC11(図15)では、コネクタ126を介して基板125上の電気回路166に制御信号を送信することにより、ドライバ回路を介してパルスモータを駆動させ、レーザ距離計110が搭載されたロータ151を回転させることができる。かくして、ロータ151を回転させるパルスモータは、レーザ距離計110を水平面内で回転させる測定用モータ160を構成する。 In PC 11 (FIG. 15), a pulse motor is driven through a driver circuit by transmitting a control signal to an
このように、本実施形態の壁面測定装置100では、支柱102に沿って上下移動可能なステータ121と、このステータ121の回りを回転可能に当該ステータ121に支持されたロータ151を備え、このロータ151にレーザ距離計110を設けることにより、レーザ距離計110から壁面に照射されるレーザに対して、当該レーザ距離計110を支持、上下移動及び回転させる機構の一部がレーザ光路を遮る構成となることを回避することができる。 As described above, the wall
またレーザ距離計110を上下移動させるための駆動機構(昇降用モータ132等)をステータ121上に搭載し、これらの機構部がステータ121と共に上下移動する構成としたことにより、ステータ121の下にこれらの駆動機構を配置する必要が無くなり、レーザ距離計110を上下移動可能な構成において、床面からの高さが一段と低い位置から測定を開始することが可能となる。 In addition, a drive mechanism (such as a lifting motor 132) for moving the
図15は、壁面測定装置100のステータ121に設けられた制御用の電気回路166(制御部)を示す図である。この電気回路166は、ステータ121の基板125(図14)に設けられている。図15においては、図3との対応部分に同一符号を付し、重複した説明は省略する。 FIG. 15 is a diagram showing a control electric circuit 166 (control unit) provided in the
通信部12は、有線又は無線でPC11との間でデータを送受信することができる。有線でデータの送受信を行う場合は、ステータ121の貫通孔128(図14)を介することで、ステータ121の上面部の基板125からステータ121の下方へ配線を引き出すことができる。また、通信部12は、レーザ距離計110に対して測定制御信号の送信を行うと共に、レーザ距離計110における測定結果の受信を行うように構成されている。因みに、電気回路166はステータ121側に設けられ、レーザ距離計110はロータ151側に設けられているため、これらの間の信号の授受は、例えばスリップリング等の手段(図示せず)が用いられる。 The
以上の構成において、壁面距離を測定する測定処理について説明する。
図14において上述したように、壁面測定装置100には通信部12を介してPC11が接続され、このPC11によって壁面測定装置100を動作させることができる。In the above configuration, a measurement process for measuring the wall surface distance will be described.
As described above in FIG. 14, the wall
図16に示すように、PC11から制御情報を受信したCPU7(図15)は、ステップS101において、壁面測定装置100の本体部112(図13)を最も低い位置(第1の高さH1(図12)に降下させた状態を初期位置として、ロータ151を1周に亘って回転させながら、周囲の壁面までの距離を測定する。これにより、図12に示した高さH1(最下位置)における壁面までの距離を測定することができる。なお、この最も低い高さH1は、壁面測定装置100における本体部112の構成により決まるものであり、本実施形態の場合、レーザ距離計110を搭載したロータ151の下部にモータ等の駆動機構や基板等を配置しない構成としたことにより、一段と低くすることができる。 As shown in FIG. 16, the CPU 7 (FIG. 15) that has received the control information from the
なお、レーザ距離計110による壁面の測定方法としては、図4〜図8について上述した方法を用いることができる。すなわち、壁面測定装置100は、第1の高さ位置H1において、ロータ151を所定角度ごとに回転させながら各角度における壁面までの距離(壁面距離)を測定し、水平面内での1回転分のデータをRAM9に記憶する。なお、この場合、図4〜図8について上述したように、水平方向での壁面の形状に合わせた精密な測定が行われる。すなわち、水平方向について変化量が一定でなくなった測定時点で、変化量が一定であった水平位置までロータ151の回転を戻し、その水平位置から短い移動距離だけ回転させた水平位置で再測定を行う。すなわち、測定間隔を狭くした再測定を行う。 In addition, as a measuring method of the wall surface by the
因みに、図13、図14に示す実施形態の構成では、レーザ距離計110は、支柱102の中心から距離LA(図14)だけずれた位置に配置されて支柱102の回りを回転するように構成されているため、測定結果は、図4〜図8において説明した測定距離L1、L2、…Lnよりも短くなる。従って、本実施形態のCPU7では、レーザ距離計110の測定結果に対して、距離LAだけ加算した距離を、測定距離L1、L2、…Lnとする。
これにより、第1の高さ位置H1における壁面の形状について、レーザ距離計110の測定データとしてRAM9(図15)に記憶される。Incidentally, in the configuration of the embodiment shown in FIGS. 13 and 14, the
Thereby, the shape of the wall surface at the first height position H1 is stored in the RAM 9 (FIG. 15) as measurement data of the
CPU7は、ステップS101の処理の後、ステップS102に処理を移して、第1の高さH1での測定が完了したか否かを判断する。この処理において、レーザ距離計110を搭載したロータ151が回転開始位置から1回転したことを検出し、レーザ距離計110の測定結果がRAM9に格納された場合にCPU7は、第1の高さH1における水平測定が完了したものと判断する。 After the process of step S101, the
CPU7は、第1の高さH1における測定が完了していないと判断すると、ステップS102からステップS101へ処理を移して、第1の高さH1での測定を続ける。これに対して、第1の高さH1における測定が完了したと判断した場合、CPU9は、ステップS102からステップS103へ処理を移して、昇降用モータ132を駆動することにより、予め決められている所定距離だけ本体部112を上昇させる。 If the
そして、CPU9は、ステップS103からステップS104へ処理を移して、垂直移動後の高さH2において、測定用モータ160を1回転させながら、当該高さにおける壁面をレーザ距離計110によって測定する。このステップS104の所定では、上述のステップS101と同様に、隅角部等では測定間隔を変更する処理が実行される。 Then, the
続いて、CPU9は、ステップS104からステップS105へ処理を移して、第2の高さH2での測定が完了したか否かを判断する。
CPU7は、第2の高さH1における測定が完了していないと判断すると、ステップS105からステップS104へ処理を移して、第2の高さH2での測定を続ける。これに対して、第2の高さH2における測定が完了したと判断した場合、CPU9は、ステップS105からステップS106へ処理を移して、本体部112(すなわちレーザ距離計110の測定位置(高さ))が最上部に達しているか否かを判断する。CPU9は、RAM7に予め設定されている、測定しようとする壁面の高さに合わせた最大測定高さを表すデータと、昇降用モータ132のそれまでの制御履歴から得られる本体部112(すなわちレーザ距離計110)の高さとを比較し、最上部まで達していると判断した場合、ステップS106において肯定結果を得ることにより、この測定処理を終了する。Subsequently, the
If the
これに対して、最上部まで達していないと判断した場合、CPU9は、ステップS106において否定結果を得ることにより、ステップS106からステップS107へ処理を移して、前回の測定高さ(例えば、第1の高さH1)における支柱102を中心とした1回転分の測定結果と、今回の測定高さ(例えば、第2の高さH2)における支柱102を中心とした1回転分の測定結果とを比較し、壁面における照射位置の垂直方向への移動に伴ってレーザ距離計110の測定結果(壁面距離)が予め設定されている閾値を超えて変化した位置(ここでは、レーザ距離計110によるレーザの照射位置として、ステータ121の上下位置によって特定される壁面の垂直位置と、ロータ151の回転位置によって特定される壁面の水平位置)を特定する。このステップS107において比較される壁面距離は、壁面上において水平方向には同じ位置であって、その上下における壁面距離である。すなわち、このステップS107で特定される対象は、壁面において垂直方向に亘って壁面距離が大きく変化する位置である。このように壁面の上下方向に亘って形状が大きく変化する箇所(すなわち壁面に凹凸がある箇所)では、その変化状態を詳細に検出することにより、壁面の状態を高精度で測定することができる。 On the other hand, if it is determined that the uppermost part has not been reached, the
かくしてCPU9は、ステップS107において、精密測定が必要であるか否かを判断する。ここで、前回の測定高さ(例えば、第1の高さH1)におけるレーザ距離計110の測定値と、今回の測定高さ(例えば、第2の高さH2)におけるレーザ距離計110の測定値(前回の測定と水平位置は同じ測定位置であって高さが異なる位置における測定値)が閾値を超えて変化していない場合、このことは、垂直方向への移動距離を小さくして再度水平測定を行う必要がないことを意味しており、この場合、CPU9はステップS107において否定結果を得ることにより、ステップS107からステップS108へ処理を移して、予め設定されている所定距離だけ本体部112を上昇させる設定を行い、ステップS103に処理を移すことにより、通常移動距離だけレーザ距離計110を上昇させて次の高さ位置(例えば、第3の高さH3)での水平測定を実行する(ステップS104)。 Thus, the
これに対して、前回の測定高さ(例えば、第1の高さH1)におけるレーザ距離計110の測定値と、今回の測定高さ(例えば、第2の高さH2)におけるレーザ距離計110の測定値(前回の測定と水平位置は同じ測定位置であって高さが異なる位置における測定値)が閾値を超えて変化している場合、このことは、この前回測定した高さと今回測定した高さの間において、壁面距離が大きく変化している箇所があること、すなわち、壁面の垂直方向の形状が大きく変化していることを意味しており、この場合、照射位置の垂直方向の移動距離を小さくして再度水平測定を行う必要がある。よって、CPU9はステップS107において肯定結果を得ることにより、ステップS107からステップS109へ処理を移して、予め設定されている所定距離よりも小さな距離だけ本体部112を上昇させて再測定を行う設定を行う。これにより、垂直移動距離を小さくしてレーザ距離計110での再測定を実行する設定が行われる。また、このときCPU9は、昇降用モータ132を逆回転させて本体部112を前回測定位置まで降下させることにより、再測定の準備を行う。そして、CPU9は、ステップS103に処理を移し、移動距離が小さく設定された状態で本体部112をその小さな移動距離だけ上昇させて水平測定を行う(ステップS104)。 On the other hand, the
これにより、図7、図8について上述した水平方向での壁面の形状に合わせた精密な測定方法と同様の測定方法(すなわち、垂直方向について変化量が一定でないことが検出された高さで、変化量が一定であった高さまで本体部112を降下させ、その高さから短い移動距離だけ上昇させた高さで再測定を行う測定方法)による測定を、垂直方向において実行することができる。 Thereby, the same measurement method as the precise measurement method according to the shape of the wall surface in the horizontal direction described above with reference to FIGS. 7 and 8 (that is, the height at which the amount of change is detected in the vertical direction is detected, Measurement can be performed in the vertical direction by lowering the
このように、壁面測定装置100を用いた測定処理においては、レーザ距離計110から壁面に照射するレーザの上下の照射角度を変えずに水平に保ったまま、レーザ距離計110自体を昇降させながら、各高さにおける壁面距離を測定することにより、精度良く壁面距離を測定することができる。 As described above, in the measurement process using the wall
具体的には、レーザ距離計110の高さを変えずにレーザの上下の照射角度を変えて壁面の各高さでの壁面距離を測定した場合、レーザ距離計110から壁面までの距離が大きくなるほど、レーザの照射角度の変化に対する壁面上の照射位置の変化量が大きくなる。これに対して、レーザの上下の照射角度を変えずにレーザ光源(レーザ距離計110)を昇降させて照射方向を水平に保ったままレーザを壁面に照射する場合、レーザ距離計110の昇降距離がそのまま壁面上の照射位置の変化量になるため、照射角度を変える場合に比べて精度良く測定することが可能となる。 Specifically, when the wall distance at each wall height is measured by changing the vertical irradiation angle of the laser without changing the height of the
なお、上述のステップS107において判断される閾値は、予めユーザが設定可能となっている。この閾値を大きくした場合は、壁面の凹凸に対して再測定する感度を低くすることできる。すなわち、壁面の僅かな凹凸は測定データとして記憶しないようにできる。これに対して、閾値を小さくした場合は、壁面の凹凸に対して再測定する感度を高くすることができる。すなわち、壁面の僅かな凹凸でも測定データとして記憶することができる。 Note that the threshold value determined in step S107 described above can be set in advance by the user. When this threshold value is increased, the sensitivity for re-measurement with respect to the unevenness of the wall surface can be lowered. That is, slight irregularities on the wall surface can be stored as measurement data. On the other hand, when the threshold value is reduced, the sensitivity for remeasurement with respect to the unevenness of the wall surface can be increased. That is, even slight irregularities on the wall surface can be stored as measurement data.
また、測定する壁面形状としては、図12に示したような凹凸を有する形状だけでなく、例えば、図17に示すように、傾斜した壁面の壁面距離を測定する場合においても、図13〜図16について上述した壁面測定装置100を用いることができる。この場合は、各高さで測定される壁面距離は、順次変化することになるため、壁面の傾斜に合わせて、閾値を設定することで、不要な再測定が実行されることを回避することができる。 Further, as the wall surface shape to be measured, not only the shape having the unevenness as shown in FIG. 12 but also when measuring the wall distance of the inclined wall surface as shown in FIG. The wall
また、図2に示したように、レーザ距離計10を水平軸Y回りに回転可能とする構成を、図12〜図17について上述した壁面測定装置100に組み込むことで、レーザ距離計を水平軸Y回りに回転可能(図2)とする構成と、レーザ距離計自体を昇降させる構成とを併用することにより、例えば、ある高さまではレーザ距離計自体を上昇させて照射方向に水平方向に固定した測定を行い、それ以上の高さにおける壁面距離を測定する場合には、レーザ距離計を水平軸回りに回転させることで、支柱102(図13)の高さが足りない一定高さ以上の壁面に対してはレーザ距離系を水平軸回りに回転させることで高所まで壁面距離を測定することができる。 Further, as shown in FIG. 2, the
また、図18に示すように、レーザ距離計110と壁面との間に家具等の障害物180が置かれている場合、レーザを用いた壁面距離測定は困難になるため、この場合は、前後の測定データ(測定位置に対して上下左右の測定結果)に基づいて、障害物180を推定して測定済データの修正を行うこともできる。 Also, as shown in FIG. 18, when an
また、壁面測定装置100においては、下から上に本体部112を上昇させながら、所定高さごとに壁面距離を測定する場合について述べたが、これに限られるものではなく、最上部から本体部112を下降させながら所定間隔で壁面距離を測定するようにしてもよい。 Further, in the wall
また、上述の実施形態では、支柱102によって本体部112を昇降させる構成の壁面測定装置100について述べたが、これに限られず、例えば、図1に示した三脚4にエレベータ機構を設け、このエレベータ機構によって、装置本体2及び回動体3からなる壁面測定装置1(図2)を昇降させるようにしてもよい。この場合、壁面測定装置1において、レーザの照射方向を水平方向に固定した測定を行うことにより、図12〜図18に示した測定方法を三脚4を用いて実現することができる。 In the above-described embodiment, the wall
(7)上記実施形態では、壁面測定装置1の水平度を手動で調整する場合について説明したが、自動で調整する構成としてもよい。
具体的には、図3との対応部分に同一符号を付して示す図19に示すように、装置本体2には、水平センサ18が設けられている。この水平センサ18は、例えば、透明の小容器に液体と少量の気泡を密閉し、中心部に光を透過させて、透過光をセンサで検知することにより水平度を測定する構成である。(7) In the above-described embodiment, the case where the level of the wall
Specifically, as shown in FIG. 19 in which parts corresponding to those in FIG. 3 are assigned the same reference numerals, the apparatus main body 2 is provided with a
図20に示すように、装置本体2は、支持脚16A、16B、16Cによって支えられており、各支持脚16A、16B、16Cの突出し高さは、水平モータ19A、19B、19Cによって調整可能となっている。CPU7(図19)は、水平センサ18の検出結果に基づいて水平モータ19A、19B、19Cを制御することにより、支持脚16A、16B、16Cの突出し高さを調整して装置本体2を自動的に水平に保つように構成されている。 As shown in FIG. 20, the apparatus main body 2 is supported by
また、図19、図20に示すように、装置本体2には、外部の機器(例えばPC11)との間でデータを送受信するための入出力ポート(I/Oポート)17が設けられている。この入出力ポート17は、例えばPC11との間でデータの受け渡しを可能とするUSB(Universal Serial Bus)コネクタ等の入出力ポートであり、通信部12によって接続管理が行われる。入出力ポート17は、固有のI/Oポートアドレスが割り当てられCPU7によって識別される。このように入出力ポート(I/Oポート)17を設けた構成とすることにより、PC11に限らず、他の周辺機器を接続することができるようになる。 As shown in FIGS. 19 and 20, the apparatus main body 2 is provided with an input / output port (I / O port) 17 for transmitting and receiving data to and from an external device (for example, the PC 11). . The input /
(8)上記実施形態では、レーザを用いて壁面距離を測定する場合について述べたが、レーザに限らず、例えば、音波等、他の媒体を利用して壁面距離を測定することができる。 (8) Although the case where the wall surface distance is measured using a laser has been described in the above embodiment, the wall surface distance can be measured using other media such as a sound wave, without being limited to the laser.
1、100 壁面測定装置
2 装置本体
3 回動体
4 三脚
7 CPU
8 ROM
9 RAM
10、110 レーザ距離計
11 パーソナルコンピュータ
12 通信部
16A〜16C 支持脚
17 入出力ポート
18 水平センサ
19A〜19C 水平モータ
102 支柱
102A ラックギア
112 本体部
121 ステータ
125 基板
131 ピニオンギア
132 昇降用モータ
151 ロータDESCRIPTION OF SYMBOLS 1,100 Wall surface measuring apparatus 2 Apparatus
8 ROM
9 RAM
10, 110
Claims (1)
A)レーザ距離計を支軸回りに回転させながら被測定面にレーザを照射し、当該レーザ距離計からレーザ照射された測定位置までの距離を測定する測定過程と、
B)前記測定過程で測定した前回のレーザによる測定位置から、今回の測定時の測定位置まで前記レーザ距離計を回転させた回転角度を検出する回転角度検出過程と、
C)前記前回と今回の測定過程で取得した2つの測定距離と、前記回転角度検出過程で検出した回転角度から測定位置間ごとの距離を求め記憶部に記憶する過程と、
D)前記レーザ距離計から前記測定位置までの測定距離を隣り合う測定位置ごとに比較し、各測定位置間の距離の変化量が所定の前記変化量から外れる場合、前記前回のレーザによる測定位置から、今回の測定時の測定位置までの間において、前記支軸回りに回転させる角度量を変更しレーザの測定間隔を短くして前記(A)〜(C)の処理を繰り返す過程と、
E)前記(A)〜(C)の処理を繰り返す前記(D)によって得た、前記レーザ距離計からレーザ照射された測定位置までの距離と、前記測定過程で測定した前回のレーザによる測定位置から、今回の測定時の測定位置まで前記レーザ距離計を回転させた回転角度とから、前記測定位置間ごとの距離を記憶する過程を複数回連続して実行して、壁面の寸法を得る前記一群のデータとして生成するデータ生成過程と、
を備えたことを特徴とする壁面測定方法。 A data used by the computer in advance stores a resolution size of the standard products covering the walls, this data can be stored as a group of data of the dimensions of the inner wall by measuring the dimensions of the inner wall which irregularities are present A wall surface measuring method capable of
A) A measurement process of irradiating the surface to be measured while rotating the laser distance meter around the support shaft and measuring the distance from the laser distance meter to the measurement position irradiated with the laser;
B) A rotation angle detection process for detecting a rotation angle obtained by rotating the laser distance meter from the measurement position of the previous laser measured in the measurement process to the measurement position at the time of the current measurement;
C) A process of obtaining a distance for each measurement position from the two measurement distances acquired in the previous and current measurement processes and the rotation angle detected in the rotation angle detection process and storing them in a storage unit;
D) When the measurement distance from the laser distance meter to the measurement position is compared for each adjacent measurement position, and the amount of change in the distance between the measurement positions deviates from the predetermined amount of change, the measurement position by the previous laser To the measurement position at the time of the current measurement, a process of changing the angle amount rotated around the spindle and shortening the laser measurement interval and repeating the processes (A) to (C),
E) The distance from the laser distance meter to the measurement position irradiated with the laser, obtained by repeating the processes of (A) to (C), and the measurement position by the previous laser measured in the measurement process from the angle of rotation which rotates the laser rangefinder to the measuring position during current measurement, by performing a process of storing the distance between every the measurement position plural times consecutively, the obtaining the dimensions of the wall A data generation process for generating a group of data;
A wall surface measuring method characterized by comprising:
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016115750 | 2016-05-24 | ||
| JP2016115750 | 2016-05-24 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017211363A JP2017211363A (en) | 2017-11-30 |
| JP6475223B2 true JP6475223B2 (en) | 2019-02-27 |
Family
ID=60476794
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016256803A Expired - Fee Related JP6475223B2 (en) | 2016-05-24 | 2016-12-10 | Wall surface measuring method and wall surface measuring apparatus |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6475223B2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210101593A (en) * | 2020-02-10 | 2021-08-19 | 인하대학교 산학협력단 | System for displacement measurement using rotary laser and methof thereof |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021005788A1 (en) * | 2019-07-11 | 2021-01-14 | 八洲電業株式会社 | Flying object |
| CN110940323B (en) * | 2019-12-30 | 2025-04-18 | 王中原 | A method and device for assisting positioning of indoor environment detection points |
| CN111141236A (en) * | 2020-02-18 | 2020-05-12 | 中建八局轨道交通建设有限公司 | Flatness measuring device and using method thereof |
| KR102221631B1 (en) * | 2020-09-10 | 2021-03-03 | 주식회사 엠케이에스이 | A distance measuring method for bridges |
| CN112683254B (en) * | 2020-09-25 | 2023-06-27 | 上海建工四建集团有限公司 | Sagging measuring device and sagging measuring method |
| JP7621113B2 (en) | 2020-12-24 | 2025-01-24 | Klass株式会社 | Room Dimension Measuring Device |
| CN112833815B (en) * | 2020-12-30 | 2022-07-05 | 广东工业大学 | A laser-based house measurement and wall flatness detection method |
| CN113188466A (en) * | 2021-03-25 | 2021-07-30 | 河北省药品医疗器械检验研究院(河北省化妆品检验研究中心) | Narrow space three-dimensional information measuring device and method based on Arduino |
| CN115031665B (en) * | 2022-08-12 | 2023-01-10 | 河北天启通宇航空器材科技发展有限公司 | Joystick Angle Test Method |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2617852B2 (en) * | 1992-04-06 | 1997-06-04 | 極東産機株式会社 | Room dimension measuring device |
| JP2002081936A (en) * | 2000-09-08 | 2002-03-22 | Toshiba Elevator Co Ltd | Apparatus for measuring dimensions of elevator |
| JP3817672B2 (en) * | 2002-05-10 | 2006-09-06 | 極東産機株式会社 | Measuring room dimensions |
| JP4061414B2 (en) * | 2002-12-27 | 2008-03-19 | 極東産機株式会社 | Apparatus and method for measuring room dimensions |
| FR2876446B1 (en) * | 2004-02-19 | 2007-04-20 | Measurix Sarl | DEVICE AND METHOD FOR MEASURING THE SURFACE AREA OF POLYGONAL PLANAR SURFACES IN SPACE. |
| US20170102232A1 (en) * | 2015-10-04 | 2017-04-13 | Daniel Roman Prochoda | Method and apparatuses for projecting scaled images |
-
2016
- 2016-12-10 JP JP2016256803A patent/JP6475223B2/en not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210101593A (en) * | 2020-02-10 | 2021-08-19 | 인하대학교 산학협력단 | System for displacement measurement using rotary laser and methof thereof |
| KR102372782B1 (en) | 2020-02-10 | 2022-03-10 | 인하대학교 산학협력단 | System for displacement measurement using rotary laser and methof thereof |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017211363A (en) | 2017-11-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6475223B2 (en) | Wall surface measuring method and wall surface measuring apparatus | |
| US10571273B2 (en) | Construction site referencing | |
| US9114493B2 (en) | Working tool positioning system | |
| JP2013190272A (en) | Three-dimensional laser measuring apparatus and three-dimensional laser measuring method | |
| EP3550262B1 (en) | Surveying instrument | |
| JPWO2019103154A1 (en) | Surveying equipment, surveying system, surveying method and surveying program | |
| CN112065078B (en) | Vertical adjusting system | |
| EP2972085A1 (en) | Method and apparatus for projection of bim information | |
| CN103925892A (en) | Device for measuring wall or ground flatness by lasers | |
| CN110926440A (en) | Surveying and mapping methods for laser surveying instrument, two-dimensional flat and three-dimensional apartment | |
| KR20180076969A (en) | Marking apparatus of installation location for insulation pin and maring method using the same | |
| CN102135423A (en) | Device and method for measuring roughness of earth surface | |
| CN219037913U (en) | Elevator well measuring device | |
| JP2003329453A (en) | Dimension measuring device for room | |
| CN111307040A (en) | Construction measuring equipment | |
| CN205139378U (en) | Three dimensions gamma radiation source location search device | |
| CN210603316U (en) | Laser mapping instrument | |
| JP4387540B2 (en) | Elevator dimension measuring device | |
| CN103868477A (en) | Wall flatness measuring instrument and measuring method thereof | |
| JP2002081937A (en) | Apparatus for measuring dimension of elevator | |
| US20130021618A1 (en) | Apparatus and method to indicate a specified position using two or more intersecting lasers lines | |
| JP4916952B2 (en) | Positioning device | |
| CN205579069U (en) | Infrared multi -point temperature measurement scanning cloud platform | |
| JP4446243B2 (en) | Frontage dimension measuring device | |
| JP2014020968A (en) | Dentistry practical training evaluation apparatus and evaluation system using the evaluation apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180530 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180612 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20180730 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180806 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20180730 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181031 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190129 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190131 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6475223 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R154 | Certificate of patent or utility model (reissue) |
Free format text: JAPANESE INTERMEDIATE CODE: R154 |
|
| LAPS | Cancellation because of no payment of annual fees |