以下の実施形態では、誘導電界を介した無線通信が可能な第1無線通信部と第2無線通信部とが、RFコイル装置側と、MRI装置の制御側とにそれぞれ配置される。この場合、例えば第1無線通信部が第2無線通信部に対して近接距離内で離脱自在に固定され、デジタル化されたMR信号が誘導電界を介して第1無線通信部から第2無線通信部に無線送信される。上記のような新規な技術により、デジタル化されたMR信号をRFコイル装置からMRI装置の制御側に対して良好に無線送信するという前述の課題を達成できる。
上記構成では、例えば、被検体が大きく動いたために、RFコイル装置にケーブル接続された第1無線通信部が揺らされた等の原因で通信阻害が生じるおそれが考えられる。その場合、正常に無線送信されるはずのMR信号の一部が受信側で送信不良となるおそれが考えられる。ここでの送信不良とは、例えば、間違ったデータの送信、及び、データの欠落等である。従って、仮に通信阻害が生じた場合でも、データの送信不良が補償される構成が望ましい。そこで、以下の実施形態では、通信阻害によるMR信号のデータの送信不良を補償することをさらなる課題とする。
以下、RFコイル装置及びMRI装置の実施形態の数例について、添付図面に基づいて説明する。なお、各図において同一要素には同一符号を付し、重複する説明を省略する。
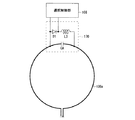
図1は、第1の実施形態におけるMRI装置20Aの全体構成を示すブロック図である。図1に示すように、MRI装置20Aは、ガントリ21と、寝台32と、天板34とを有する。天板34は、寝台32に支持されるように、寝台32上で移動可能に配置される。また、MRI装置20Aは、例えば円筒状に形成されるガントリ21内において、静磁場磁石22と、シムコイル24と、傾斜磁場コイル26と、送信用RFコイル28とを有する。ガントリ21は、図中に太線の枠で示す部分に対応する。
天板34上には被検体Pが載置される。静磁場磁石22及びシムコイル24は、例えば円筒状であり、シムコイル24は、静磁場磁石22の内側において静磁場磁石22と軸を同じにして配置されている。
ここでは一例として、装置座標系の互いに直交するX軸、Y軸、Z軸を以下のように定義する。まず、静磁場磁石22及びシムコイル24は、それらの軸方向が鉛直方向に直交するように配置されているものとし、静磁場磁石22及びシムコイル24の軸方向をZ軸方向とする。また、鉛直方向をY軸方向とし、天板34は、その載置用の面の法線方向がY軸方向となるように配置されているものとする。
MRI装置20Aは、その制御側として、静磁場電源40と、シムコイル電源42と、傾斜磁場電源44と、RF送信器46と、RF受信器48と、天板駆動装置50と、システム制御部52と、システムバス54と、画像再構成部56と、画像データベース58と、画像処理部60と、入力装置62と、表示装置64と、記憶装置66とを有する。なお、天板駆動装置50は寝台32内に設けられている。
静磁場磁石22は、静磁場電源40から供給される電流により撮像空間に静磁場を形成させる。上記撮像空間とは、例えば、被検体Pが置かれて、静磁場が印加されるガントリ21内の空間を意味する。
静磁場磁石22は、超伝導コイルで構成される場合が多く、励磁の際に静磁場電源40に接続されて電流が供給されるが、一旦励磁された後は非接続状態とされるのが一般的である。なお、静磁場電源40を設けずに、静磁場磁石22を永久磁石で構成してもよい。
シムコイル24は、シムコイル電源42に接続され、シムコイル電源42から供給される電流により静磁場を均一化する。
傾斜磁場コイル26は、例えば、静磁場磁石22の内側で筒状に形成されている。傾斜磁場コイル26は、傾斜磁場電源44から供給される電流により、X軸方向の傾斜磁場Gx、Y軸方向の傾斜磁場Gy、Z軸方向の傾斜磁場Gzを撮像領域にそれぞれ形成する。即ち、装置座標系の3軸方向の傾斜磁場Gx、Gy、Gzを合成し、論理軸としてのスライス選択方向傾斜磁場Gss、位相エンコード方向傾斜磁場Gpe、及び、読み出し方向(周波数エンコード方向)傾斜磁場Groの各方向を任意に設定できる。
なお、上記撮像領域とは、例えば、1画像又は1セットの画像の生成に用いるMR信号の収集範囲であって、撮像空間の一部として設定される領域を意味する。「1セットの画像」とは、例えばマルチスライス撮像などのように、1のパルスシーケンス内で複数画像のMR信号が一括的に収集される場合の「複数画像」である。撮像領域は、例えば装置座標系で3次元的に規定される。
RF送信器46は、システム制御部52から入力される制御情報に基づいて、核磁気共鳴を起こすためのラーモア周波数のRFパルス(RF電流パルス)を生成し、これを送信用RFコイル28に送信する。送信用RFコイル28は、RF送信器46からRFパルスを受けて、このRFパルスを被検体Pに送信する。なお、送信用RFコイル28には、ガントリ21に内蔵されていると共にRFパルスの送信も受信も兼用する全身用コイルが含まれる(図示せず)。
天板34の内部には、受信用RFコイル29が配置されている。受信用RFコイル29は、被検体P内の原子核スピンがRFパルスによって励起されることで発生したMR信号を検出し、検出されたMR信号をRF受信器48に送信する。
RFコイル装置100Aは、例えば、MR信号の受信用の装着型局所コイルである。ここではRFコイル装置100Aとして、被検体Pの胸部に装着され、胸部からのMR信号を受信するものを図示しているが、これは一例にすぎない。MRI装置20Aでは、RFコイル装置100A以外にも、肩用RFコイル装置、腰用RFコイル装置100α(後述の図10を参照)など、各種の装着型RFコイル装置をMR信号の受信用に使用可能である。
これらの受信用RFコイル装置(100A、100α)は、ここでは一例としてMRI装置20Aの一部とするが、MRI装置20Aとは別個のものとして捉えてもよい。
RFコイル装置100Aは、ケーブル102を有し、ケーブル102によってコイル側無線通信装置200Aに接続されている。
天板34の内部には、複数の制御側無線通信装置300が配置されている。1つのコイル側無線通信装置200Aと、いずれか1つの制御側無線通信装置300との間で、前述したデジタル化されたMR信号の無線通信が行われる。
但し、例えば被検体Pに複数のRFコイル装置が装着される場合、この限りではない。この場合、例えば、複数のRFコイル装置にそれぞれ対応する複数のコイル側無線通信装置200Aと、複数のコイル側無線通信装置200Aにそれぞれ対応する複数の制御側無線通信装置300との間でデジタル化されたMR信号の無線通信がそれぞれ行われる。
従って、MRI装置20Aにおけるコイル側無線通信装置200Aは請求項記載の第1無線通信部の一例であり、制御側無線通信装置300は請求項記載の第2無線通信部の一例である。無線通信の動作については後述する。
なお、図1では煩雑となるので、制御側無線通信装置300を2つのみ図示しているが、制御側無線通信装置300は3つ以上でもよく、1つのみでもよい。但し、制御側無線通信装置300が離散して多数配置されている方が、1つのみの配置の場合よりも望ましい。その方が、コイル側無線通信装置200Aを制御側無線通信装置300に対して近接固定する際の選択の余地が多いからである。
換言すれば、固定箇所の選択の余地が多い方が、RFコイル装置100Aに最も近い制御側無線通信装置300に対して、コイル側無線通信装置200Aを近接固定できるからである。そのようにすれば、RFコイル装置100Aとコイル側無線通信装置200Aとを繋ぐケーブル102を短くできる。上記の「近接固定」とは、例えば、誘導電界を介した無線通信が可能となる程度に、互いに電磁的に結合された範囲(近さ)において、互いに物理的に動かないように固定する意味である。
本実施形態では一例として、MRI装置20A内における送信用RFコイル28までのRFパルスの送信や、被検体Pから検出したMR信号の伝達は、コイル側無線通信装置200A−制御側無線通信装置300間を除いて有線で行われる。
RF受信器48は、検出したMR信号に所定の信号処理を施すことで、デジタル化されたMR信号の複素データ(以下、MR信号の生データという)を生成する。RF受信器48は、生成したMR信号の生データを画像再構成部56に入力する。
システム制御部52は、撮像動作及び撮像後の画像表示において、システムバス54等の配線を介してMRI装置20A全体のシステム制御を行う。
そのために、システム制御部52は、傾斜磁場電源44、RF送信器46及びRF受信器48の駆動に必要な制御情報を記憶する。ここでの制御情報とは、例えば、傾斜磁場電源44に印加するパルス電流の強度や印加時間、印加タイミング等の動作制御情報を記述したシーケンス情報である。
システム制御部52は、記憶した所定のシーケンスに従って傾斜磁場電源44、RF送信器46及びRF受信器48を駆動させることで、傾斜磁場Gx、Gy、Gz及びRFパルスを発生させる。
また、システム制御部52は、天板駆動装置50を制御して寝台32の高さを変えることで、天板34をY軸方向に昇降させることが可能である。また、システム制御部52は、天板駆動装置50を制御することで天板34を装置座標系のZ軸方向に移動させ、ガントリ21内部の撮像空間に対して天板34を出し入れさせる。システム制御部52及び天板駆動装置50は、このように天板34のZ軸方向の位置を制御することで、天板34上の被検体Pの撮像部位を撮像空間内の磁場中心に位置させる。
また、システム制御部52は、撮像条件設定部としても機能する。即ち、システム制御部52は、操作者が入力装置62に対して入力した被検体Pの情報や一部の撮像条件に基づいて、本スキャンの撮像条件を設定する。そのために、システム制御部52は、撮像条件の設定画面情報を表示装置64に表示させる。
入力装置62は、撮像条件や画像処理条件を設定する機能を操作者に提供する。
上記撮像条件とは、例えば、どの種類のパルスシーケンスにより、どのような条件でRFパルス等を送信して、どのような条件で被検体PからMR信号を収集するかを意味する。撮像条件の例としては、撮像空間内での位置的情報としての撮像領域、撮像部位、パラレルイメージングなどのパルスシーケンスの種類、使用するRFコイル装置の種類、スライス数、スライス間の間隔等が挙げられる。
上記撮像部位とは、例えば、頭部、胸部、腹部などの被検体Pのどの部分を撮像領域として画像化するかを意味する。
上記「本スキャン」は、プロトン密度強調画像などの、目的とする診断画像の撮像のためのスキャンであって、位置決め画像用のMR信号収集のスキャンや、較正用スキャンを含まないものとする。スキャンとは、MR信号の収集動作を指し、画像再構成を含まないものとする。較正用スキャンとは例えば、本スキャンの撮像条件の内の未確定のものや、本スキャン後の画像再構成時に用いる条件やデータなどを決定するために、本スキャンとは別に行われるスキャンを指す。後述のプレスキャンは、較正用スキャンの内、本スキャン前に行われるものを指す。
画像再構成部56は、位相エンコードステップ数及び周波数エンコードステップ数に基づいて、RF受信器48から入力されるMR信号の生データを例えばマトリクスデータに変換し、これをk空間データとして保存する。k空間とは、周波数空間(フーリエ空間)の意味である。画像再構成部56は、k空間データに2次元フーリエ変換などを含む画像再構成処理を施すことで、被検体Pの画像データを生成する。画像再構成部56は、生成した画像データを画像データベース58に保存する。
画像処理部60は、画像データベース58から画像データを取り込み、これに所定の画像処理を施し、画像処理後の画像データを表示用画像データとして記憶装置66に記憶させる。
記憶装置66は、上記の表示用画像データに対し、その表示用画像データの生成に用いた撮像条件や被検体Pの情報(患者情報)等を付帯情報として付属させて記憶する。
表示装置64は、システム制御部52の制御に従って、本スキャンの撮像条件の設定用画面や、撮像により生成された画像データが示す画像などを表示する。
図2は、RFコイル装置100Aの構成、及び、制御側無線通信装置300の配置の一例を示す模式図である。図2に示すように、RFコイル装置100Aは、ケーブル102と、カバー部材104とを有する。
カバー部材104は、可撓性を有する材料によって折り曲げ等の変形が可能に形成されている。このように変形可能な材料としては、例えば特開2007−229004号公報に記載の可撓性を有する回路基板(Flexible Printed Circuit:FPC)などを用いることができる。
カバー部材104内には、被検体PからのMR信号を検出するアンテナとして機能する複数のコイル素子(表面コイル)106a、106b、106c、106d、106e、106fが配置されている。ここでは一例として、6個のコイル素子106a〜106fを図示しているが、コイル素子106の数や形状については、図示したものに限定されるものではない。
また、カバー部材104内には、受信に用いるコイル素子(106a〜106f)の選択などのRFコイル装置100Aの動作を制御する選択制御部108が設けられる。カバー部材104内には、A/D変換器140a(analog to digital converter)などの他の構成要素もあるが、その詳細については図4を用いて後述する。
ここでは一例として、RFコイル装置100Aとコイル側無線通信装置200Aとを別々の構成要素として説明するが、これは解釈の一例にすぎない。コイル側無線通信装置200AがRFコイル装置100Aの一部である構成としてもよい。
ケーブル102は、一端側がMRI装置20Aのコイル側無線通信装置200Aに接続されており、他端側がカバー部材104内の選択制御部108等に接続されている。
また、カバー部材104内には、コイル素子106a〜106fで検出されたMR信号を増幅するプリアンプや、フィルタリングのための帯域通過フィルタ等が設けられていてもよい。
制御側無線通信装置300は、ここでは一例として、天板34における被検体Pが載置される面(以下、天板34の上面という)側に8つ配置されている。被検体Pは例えば、天板34の幅方向(図1のX軸方向)において中央に載置される。従って、この例では制御側無線通信装置300は、天板34の幅方向の両端側においてそれぞれ、天板34の長手方向(Z軸方向)に沿った列状に離散して4つずつ配置されている。
また、制御側無線通信装置300は、その筐体302(後述の図3参照)が天板34の上面の直下に埋設され、その固定板320(後述の図3参照)が天板34の上面から露出している。コイル側無線通信装置200Aは、固定板320に嵌合されることで、制御側無線通信装置300に対して離脱自在に固定される。
従って、RFコイル装置が被検体Pのどの部分に装着されても、コイル側無線通信装置200Aを最も近くの制御側無線通信装置300に対して近接固定すればよい。本実施形態では胸部用のRFコイル装置100Aの例であるが、この点は、他の部位用のRFコイル装置とコイル側無線通信装置200Aとの組み合わせの場合についても言える。このため、ケーブル102の長さを短くできる。
なお、制御側無線通信装置300の数や配置箇所は、図2の態様(天板34内部)に限定されるものではない。制御側無線通信装置300は、例えば天板34上やガントリ21上に露出して配置してもよいし、ガントリ21内部に配置してもよいし、寝台32に対して配置してもよい。
図3は、コイル側無線通信装置200Aを制御側無線通信装置300に対して固定する方法の一例を示す断面模式図である。図3(A)に示すように、コイル側無線通信装置200Aの筐体202上には、例えば2つの突起220が形成されている。
突起220は、コイル側無線通信装置200Aの差し込み及び取り外しを容易にするため、例えば横断面が半円状に形成されている。一般に、突起220の表面の起伏が激しい構造よりも、滑らかに面取りされている方がコイル側無線通信装置200Aの差し込みが容易だからである。突起220は、例えば球面状であってもよいし、円筒をその軸方向に沿って半分に分割した形状でもよい。
ここでは一例として、突起220を含む筐体202は、変形しない非磁性体の材料で形成されているものとする。非磁性体の材料で形成することで、誘導電界を介した無線通信への影響を確実に回避できる。
制御側無線通信装置300は、その筐体302の両側の側面に対して例えば接着などにより固定された2つの固定板320を有する。各固定板320は、例えば略平板状であり、互いに対向するように配置されている。各固定板320は、図3(C)に示すように、コイル側無線通信装置200Aを嵌合させる形状である。即ち、2つの固定板320において、互いに対向する面には、突起220に対応する位置に、突起220を嵌合させる窪み部320aがそれぞれ面取りされている(図3(A)参照)。
また、各固定板320において、その先端側(筐体302とは反対側)は、コイル側無線通信装置200Aを差し込み易くするために、斜めに面取りされている。固定板320については、図3(B)に示す程度の湾曲が可能な非磁性体の弾性材料で形成することが望ましい。かかる材料としては、例えば、プラスチックや合成樹脂などが挙げられる。非磁性体の材料で形成する理由は、前述同様である。
制御側無線通信装置300は、天板34の上面から、例えば間隔Dだけ奥に埋設されている(図3(C)の矢印参照)。間隔Dは、誘導電界を介した無線通信が可能な間隔である。天板34の上面には、固定板320を挿通させる溝が形成されており、この溝を介して、固定板320が天板34の上面から突出している。
上記構成では、図3(A)の状態から、コイル側無線通信装置200Aが制御側無線通信装置300に差し込まれる。このとき、図3(B)に示すように、各固定板320は一時的に互いに離れる方向に曲がる。これは、コイル側無線通信装置200Aの両側の突起220間の最長幅が、両固定板320の最短幅よりも、大きいためである。
そして、コイル側無線通信装置200Aの筺体220の底面が天板34の上面に接する位置において、両側の突起220がそれぞれ窪み部320aに嵌合され、各固定板320は、形状復元力により元の形状(図3(A)の形状)に戻る。これにより、コイル側無線通信装置200Aは、天板34上で制御側無線通信装置300に対して離脱自在に固定される。
ここで、コイル側無線通信装置200Aは、その底面側(上記固定時における制御側無線通信装置300側)において、アンテナ206a〜206dを有する。また、制御側無線通信装置は、その上面側(上記固定時におけるコイル側無線通信装置200A側)において、アンテナ306a〜306dを有する。アンテナ306a〜306dは、アンテナ206a〜206dとそれぞれ一対となるものである(計4対)。これらの内、少なくともアンテナ206a−306aは、例えば後述の誘導電界結合型カプラである。
そして、上記のようにコイル側無線通信装置200Aと制御側無線通信装置300とが互いに近接固定された状態において、アンテナ206a〜206dは、アンテナ306a〜306dにそれぞれ対向する位置に配置される。撮像が終了した場合には、コイル側無線通信装置200Aを天板34から離すように固定板320から抜き外せばよい。
なお、上記のような嵌合は、コイル側無線通信装置200Aの固定方法の一例にすぎず、離脱自在な固定方法については、他の方法でもよい。例えば、面ファスナーのオス側及びメス側の内、一方を天板34の上面に固定し、他方をコイル側無線通信装置200Aの底面に固定してもよい。制御側無線通信装置300の上面が天板34の上面に露出する場合には、面ファスナーのオス側及びメス側の一方を御側無線通信装置300の上面に固定してもよい。
コイル側無線通信装置200Aと制御側無線通信装置300との間では、誘導電界を介した近接無線通信が実行される。誘導電界とは、磁束密度の時間変化によって生じる電界である。誘導電界を介した近接無線通信としては、例えば、誘導電界結合型カプラをアンテナとして用いるトランスファージェット(TransferJet:登録商標)などを用いればよい(例えば特開2010−147922号公報参照)。
より詳細には、誘導電界結合型カプラは、結合電極、共振スタブ、グランドなどを有する(図示せず)。誘導電界結合型カプラの送信側の共振スタブに電気信号が入力されると、結合電極に電荷が蓄積され、その電荷と同等の仮想電荷がグランドに発生する。それらの電荷によって微小電気双極子が構成され、この微小電気双極子が送信側アンテナとして機能する。即ち、微小電気双極子が発生する縦波の誘導電界により、受信側にデータが転送される。進行方向と平行に振動する縦波は、アンテナの向きに依存しないため、安定したデータ転送を実現できる。
但し、送信側と受信側とを離しすぎると、両者が電磁的に結合されないため、データ送信ができない。誘導電界結合型カプラにより形成される誘導電界は、離れると急激に減衰するからである。
図3では各構成要素を区別するために、アンテナ206a〜206dを互いに離間して配置すると共に、アンテナ306a〜306dを互いに離間して配置しているが、離間して配置しなくとも、4つの無線通信経路同士の干渉を避けることができる。
具体的には、アンテナ206a−306a間、アンテナ206b−306b間、アンテナ206c−306c間、アンテナ206d−306d間で、無線周波数を分離すればよい(周波数値を大きく離せばよい)。このとき、各無線通信経路では、被検体Pに送信されるRFパルスの中心周波数の整数分の一となる周波数を避けることが望ましい。
制御側無線通信装置300の設置箇所は、天板34の上面から深すぎないことが望ましい。制御側無線通信装置300のアンテナ306a〜306dの位置が深すぎると、送信側及び受信側のアンテナ206a〜206d、306a〜306dが互いに電磁的に結合される程度に、両者の間隔D(図3(C)参照)を近接させることができない。その場合、誘導電界を介した無線通信が困難となる。即ち、制御側無線通信装置300は、電磁的に結合される程度にコイル側無線通信装置200Aに対して近接固定することが可能な位置に配置することが望ましい。
なお、コイル側無線通信装置200A側の電気双極子自体(アンテナ)と、制御側無線通信装置300側の電気双極子自体(アンテナ)とを直接接触させない限り、コイル側無線通信装置200A側のアンテナを覆う筐体と、制御側無線通信装置300側のアンテナを覆う筐体とを接触させても構わない。送信側のアンテナと、受信側のアンテナとの間に誘導電界が生じる間隔Dを確保できればよいからである。従って、制御側無線通信装置300は、そのアンテナ側の面が、天板34の上面に揃うように露出していてもよい。
図4は、RFコイル装置100Aのコイル素子106a〜106fで検出されたMR信号の送信に関わる各部の機能を模式的に示すブロック図である。以下、図4の上側から順に構成要素を説明する。即ち、RFコイル装置100Aのカバー部材104、コイル側無線通信装置200A、制御側無線通信装置300、MRI装置20Aの制御側、の順に説明する。
まず、カバー部材104内には、前述の選択制御部108と、前述の複数のコイル素子106a〜106fと、A/D変換器140a〜140fと、P/S変換器(Parallel/Serial Converter)144と、充電池BAと、データ保護部150とが配置される。但し、図4では煩雑となるので、コイル素子106c〜106f、及び、A/D変換器140c〜140fを図示していない。
データ保護部150は、記憶制御部152と、電界シールド156と、電界シールド156内の記憶素子160a〜160fとを有する。但し、図4では煩雑となるので、記憶素子160c〜160fを図示していない。即ち、この例では、記憶素子(160a〜160f)の数は、A/D変換器(140a〜140f)の数、及び、コイル素子(106a〜106f)の数と同数である。
各A/D変換器140a〜140fは、各コイル素子106a〜106fにそれぞれ対応し、記憶素子160a〜160fは、各A/D変換器140a〜140fにそれぞれ対応する。各コイル素子106a〜106fで検出されたMR信号は、対応するA/D変換器140a〜140fでそれぞれデジタル化されてから、対応する記憶素子160a〜160fにそれぞれ記憶される。
各記憶素子160a〜160fは、誘導電界を介してコイル側無線通信装置200Aから制御側無線通信装置300に無線送信されるMR信号のデータをバックアップする。このため、コイル側無線通信装置200Aから制御側無線通信装置300にMR信号が正常に送信されなかった場合、記憶素子160a〜160f内の記憶データが用いられる。
従って、記憶素子(160a〜160f)の最大数としては、アンテナとして機能するコイル素子(106a〜106f)と同数が望ましい。但し、記憶素子の数は、上記態様に限定されるものではなく、例えば1つでもよい。或いは、記憶素子の数は、コイル素子の数の半数とし、各記憶素子に対して、2つのコイル素子で検出されたMR信号をそれぞれ記憶させてもよい。
記憶素子160a〜160fとしては、MR信号の送信、受信に対する影響を回避するため、非磁気的にデータの読み書きが可能なものが望ましい。従って、記憶素子160a〜160fとしては、例えば、フラッシュメモリやEEPROM(Electronically Erasable and Programmable Read Only Memory)などの半導体記憶素子を用いることができる。本実施形態では一例として、フラッシュメモリを用いるものとする。
但し、記憶素子160a〜160fについては、半導体記憶素子に限定されるものではない。例えば光ピックアップ装置をデータ保護部150内に搭載し、書き替え可能な小型の光ディスクに対して、レーザーによりデータの記録及び消去を実行してもよい。その場合、電界シールド156を省いてもよい。
また、記憶素子160a〜160fはそれぞれ、例えばUSB(Universal Serial Bus)などの接続ポートを有し、この接続ポートを介して、データ保護部150に対して離脱自在に接続可能である。また、記憶素子160a〜160fはそれぞれ、後述のデータ回収部600(図10参照)に対しても、離脱自在に接続可能である。
電界シールド156は、例えば、非磁性体であると共に導電性の高い金属により形成した筐体である。かかる金属としては、例えば真鍮や銅が挙げられる。なお、プラスチックなどの変形しない非磁性体を銅箔で覆うことで電界シールド156を形成してもよい。
記憶制御部152は、各記憶素子160a〜160fに対するMR信号のデータの書き込み及び消去の動作を制御する。
次に、コイル側無線通信装置200Aは、前述のアンテナ206a〜206dに加えて、データ送信部216と、参照信号受信部218と、ID送信部(Identification Information Transmitting Unit)222と、ゲート信号受信部224と、コイルL2とをさらに有する。
図4において、ゲート信号受信部224−選択制御部108間の配線、コイルL2−充電池BA間の配線、参照信号受信部218−各A/D変換器140a〜140f間の配線、及び、P/S変換器144−データ送信部216間の配線等は、ケーブル102(図2参照)内に収納される。図4では煩雑となるので、ケーブル102を図示していない。
また、コイル側無線通信装置200A内のコイルL2と、カバー部材104内の充電池BAとにより、電力受給部220が構成される。
次に、制御側無線通信装置300は、前述のアンテナ306a〜306dに加えて、データ受信部316と、参照信号送信部318と、電力供給部320と、ID受信部(Identification Information Receiving Unit)322と、ゲート信号送信部324とをさらに有する。また、電力供給部320は、コイルL1を有する。
次に、MRI装置20Aの制御系は、図1に示した構成要素に加えて、周波数アップコンバージョン部402、パルス波形生成部404、固定周波数生成部406、可変周波数生成部408をさらに有する。また、RF受信器48は、周波数ダウンコンバージョン部410と、判定部412とを有する。
第1の実施形態では一例として、コイル側無線通信装置200Aと制御側無線通信装置300との間には、充電用の誘導磁界が発生する領域と、4つの無線通信経路とが存在する。以下、これらについて順に説明する。
コイルL2がコイルL1と電磁的に結合される程度に近接した範囲内にある場合、即ち、前述の図3(C)のようにコイル側無線通信装置200Aが制御側無線通信装置300に対して近接固定された場合を考える。この場合、電力供給部320がコイルL1に1次側電流を流すことで生じる誘導磁界により、コイルL2には起電力が発生する。この起電力によりコイルL2に2次側電流が流れ、充電池BAが充電される。
電力受給部220は、不図示の配線を介して、コイル側無線通信装置200A内の各部やRFコイル装置100Aの各部に対して、上記のように充電された電力を供給する。ここで、コイルL1に流す1次側電流の周波数については、4つの無線通信経路の通信周波数から分離することが望ましい。これは、アンテナ206a〜206d、306a〜306d間の4つの無線通信経路の信号と、上記1次側電流及び2次側電流との干渉を避けるためである。
なお、RFコイル装置100Aの電力確保の方法としては、電力受給部220や電力供給部320の代わりに、RFコイル装置100Aの未使用期間中に充電される別の充電池をカバー部材104内に搭載してもよい。或いは、RFコイル装置100Aの未使用期間中に充電される別の充電池と、上記電力受給部220及び電力供給部320による電力供給とを併用してもよい。
次に、4つの無線通信経路について説明する。誘導電界を介した無線通信は、少なくともアンテナ206a−306a間で行われるが、アンテナ206b−306b間やアンテナ206d−306d間で行われてもよい。
第1に、アンテナ206c−306c間では、RFコイル装置100Aの識別情報がコイル側無線通信装置200Aから制御側無線通信装置300に無線送信される。具体的には例えば、上記識別情報がID送信部222に予め記憶されている。但し、RFコイル装置100Aの識別情報は、選択制御部108からケーブル102を介してコイル側無線通信装置200AのID送信部222に入力されてもよい。
ID受信部322のアンテナ306cがID送信部222のアンテナ206cに近づくと、ID送信部222は、ID受信部322から無線送信される電力に基づいて動作する。即ち、ID送信部222は、上記識別情報をデジタル信号としてアンテナ206cからアンテナ306cに自動的に無線送信する。この識別情報の無線通信は、例えばICタグ(Integrated Circuit Tag)などに代表されるRFID(Radio Frequency Identification)と同様の手段でよい。
ID受信部322は、アンテナ306cで受信したRFコイル装置100Aの識別情報をシステム制御部52に入力する。これにより、胸部用RFコイル装置、肩用RFコイル装置などの各種RFコイル装置のどれが現在接続されているか等の情報がシステム制御部52により認識される。
第2に、アンテナ306d−206d間では、制御側無線通信装置300のゲート信号送信部324からコイル側無線通信装置200Aのゲート信号受信部224に対して、ゲート信号が撮像中において継続的に無線送信される。
より詳細には、RFコイル装置100A内の各コイル素子106のオンオフを切り替えるスイッチとして、例えば、PINダイオード(p-intrinsic-n Diode)を含むアクティブトラップ回路170などが用いられる(後述の図6参照)。ゲート信号は、例えば、トラップ回路のインピーダンスの切替タイミングを規定する信号(上記スイッチの制御信号)である。なお、ゲート信号送信部324からゲート信号受信部224にトリガ信号が送信され、ゲート信号受信部224内でトリガ信号に基づいてゲート信号が生成される構成でもよい。
RFパルスが被検体Pに送信される期間では、ゲート信号送信部324、アンテナ306d、206d、ゲート信号受信部224を介してRFコイル装置100Aに入力されるゲート信号は、通常、オンレベルにされる。ゲート信号がオンレベルの期間では、上記スイッチはオフ状態となり、各コイル素子106a〜106fは、ループが途切れた状態となり、MR信号を検出できない。
RFパルスが被検体Pに送信される期間を除く期間では、オフレベルのゲート信号が無線送信される。ゲート信号がオフレベルの期間では、上記スイッチはオン状態となり、各コイル素子106a〜106fは、MR信号を検出できる。このようなコイル素子106a〜106fのオンオフの切り替えにより、被検体PにRFパルスを送信する送信用RFコイル28と、MR信号を受信するコイル素子106a〜106fとの間のカップリングが防止される。
第3に、アンテナ306b−206b間では、制御側無線通信装置300の参照信号送信部318からコイル側無線通信装置200Aの参照信号受信部218に対して、デジタルの参照信号がスキャンの始めに無線送信される。
具体的には、参照信号は、MR信号の送信側であるコイル側無線通信装置200Aと、固定周波数生成部406をベースとしたシステムの基準周波数とを同期させる信号である。参照信号送信部318は、固定周波数生成部406から入力される基準クロック信号に対して変調、周波数変換、増幅、フィルタリング等の処理を施すことで、参照信号を生成する。
第1の実施形態では一例として、参照信号受信部218は、一定周波数の基準クロック信号を生成する水晶発振器などを有し、参照信号送信部318と同様にして参照信号を生成可能である。即ち、参照信号受信部218は、スキャンの始めのみ参照信号を受信後、受信した参照信号内の立ち上がりや立ち下がり等のタイミングに適合させて、参照信号の生成を開始する。なお、スキャンの始めに参照信号受信部218が受信する参照信号には、後述のA/D変換開始信号(トリガ信号)が重畳されている。
参照信号受信部218は、生成した参照信号を各A/D変換器140a〜140fに対して、スキャン中に継続的に入力する。これにより、コイル側無線通信装置200Aと制御側無線通信装置300との間に通信阻害が生じた場合にも、コイル素子(106a〜106f)で検出されたMR信号は、A/D変換器140a〜140fで正常にA/D変換されてから、記憶素子160a〜160fにバックアップされる。
但し、参照信号受信部218内で参照信号を生成しなくてもよい。アンテナ306b−206b間において、参照信号送信部318から参照信号受信部218に参照信号を撮像中に継続的に無線送信してもよい。
固定周波数生成部406は、一定周波数の基準クロック信号を生成する。固定周波数生成部406は、基準クロック信号を生成するために、例えば安定度の高い水晶発振器などを有する。固定周波数生成部406は、参照信号送信部318及び可変周波数生成部408に基準クロック信号を入力する。また、固定周波数生成部406は、画像再構成部56やパルス波形生成部404などのMRI装置20A内でクロック同期が行われる箇所にも基準クロック信号を入力する。
可変周波数生成部408は、PLL(Phase-Locked Loop:位相同期回路)、DDS(Direct Digital Synthesizer:デジタル直接合成発振器)、ミキサなどを有する。可変周波数生成部408は、上記の基準クロック信号に基づいて動作する。可変周波数生成部408は、RFパルスの中心周波数としてシステム制御部52から入力される設定値に一致する可変周波数のローカル信号(クロック信号)を生成する。
そのために、システム制御部52は、プレスキャンの前にRFパルスの中心周波数の初期値を可変周波数生成部408に入力する。また、システム制御部52は、プレスキャン後にはRFパルスの中心周波数の補正値を可変周波数生成部408に入力する。
可変周波数生成部408は、周波数ダウンコンバージョン部410及び周波数アップコンバージョン部402に対して、上記の可変周波数のローカル信号を入力する。
また、カバー部材104内のA/D変換器140a〜140fにおけるサンプリングのタイミングを決めるトリガ信号(A/D変換開始信号)が、システム制御部52から参照信号送信部318に入力される。ここでのサンプリングとは、例えば、アナログ信号の強さを一定時間ごとに採取し、デジタル記録が可能な形にすることである。ここでは一例として、参照信号送信部318は、トリガ信号を参照信号に重畳することで参照信号及びトリガ信号の双方を、スキャンの始めのみ参照信号受信部218に無線送信する。
第4に、アンテナ206a−306a間では、コイル側無線通信装置200Aのデータ送信部216から制御側無線通信装置300のデータ受信部316に対して、デジタルのMR信号が誘導電界を介して無線送信される。
具体的には、受信用に選択されたコイル素子(106a〜106fの少なくとも1つ)で検出されたアナログのMR信号は、対応するA/D変換器(140a〜140fのいずれか)に入力され、デジタル信号に変換される。このとき、各A/D変換器(140a〜140f)には、参照信号受信部218から参照信号及びトリガ信号が入力される。従って、各A/D変換器(140a〜140f)は、トリガ信号が送信されたタイミングに同期して、参照信号(サンプリングクロック信号)に基づいてサンプリング及び量子化を開始する。
各A/D変換器(140a〜140f)は、対応する記憶素子(160a〜160fのいずれか)と、P/S変換器144とに対して、デジタルのMR信号を入力する。即ち、A/D変換器140aは、記憶素子160a及びP/S変換器144に対して、コイル素子106aで検出されてからデジタル化されたMR信号を入力する。同様に、A/D変換器140bは、記憶素子160b及びP/S変換器144に対して、コイル素子106bで検出されてからデジタル化されたMR信号を入力する。A/D変換器140c〜140fについても同様である。
但し、MR信号の受信用に選択されていないコイル素子(106a〜106f)が存在する場合、当該非選択のコイル素子に対応するA/D変換器(140a〜140f)及び記憶素子(160a〜160f)は動作しない。
P/S変換器144は、入力された単数又は複数のMR信号を無線送信用にパラレル信号からシリアル信号に変換し、このシリアル信号をケーブル102経由でコイル側無線通信装置200Aのデータ送信部216に入力する。第1の実施形態の例では、MR信号の送信用のアンテナは、アンテナ206aの1つだけだからである。
但し、本実施形態はシリアル信号として無線送信する態様に限定されるものではない。例えばMR信号の送信用及び受信用のアンテナ数を増やす等により、パラレル信号のまま無線送信する構成にしてもよい。
データ送信部216は、入力されたシリアルのMR信号に対し、誤り訂正符号化、インタリーブ、変調、周波数変換、増幅、フィルタリングなどの処理を施すことで、(シリアル信号かつデジタル信号である)無線送信用のMR信号を生成する。データ送信部216は、無線送信用のMR信号をアンテナ206aからアンテナ306aに無線送信する。
データ受信部316は、アンテナ306aにより受信したMR信号に対して、増幅、周波数変換、復調、逆インタリーブ、誤り訂正復号等の処理を施す。これにより、データ受信部316は、無線送信用のMR信号から元のデジタルのMR信号を抽出し、抽出したMR信号をRF受信器48の周波数ダウンコンバージョン部410に入力する。
周波数ダウンコンバージョン部410は、可変周波数生成部408から入力されるローカル信号を、データ受信部316から入力されるMR信号に乗算し、さらにフィルタリングによって所望の信号帯域のみを通過させる。これにより、周波数ダウンコンバージョン部410は、MR信号を周波数変換(ダウンコンバージョン)し、周波数が低くされたMR信号を判定部412に入力する。
判定部412は、周波数が低くされたMR信号に所定の信号処理を施すことで、MR信号の生データを生成し、MR信号の生データに基づいて送信不良の有無を判定する。判定部412は、送信不良有りと判定した場合、データのどの部分が送信不良(欠落等)であるかを特定する。送信不良の有無の判定方法、及び、送信不良部分の特定方法については、図5を用いて後述する。
判定部412は、MR信号の生データを画像再構成部56に入力し、画像再構成部56は、MR信号の生データをk空間データに変換して保存する。
なお、上記構成では、RF受信器48と、制御側無線通信装置300とを別々の構成要素として説明したが、これは一例にすぎない。例えば、RF受信器48が制御側無線通信装置300の一部である構成でもよい。
また、送信不良の有無の判定、及び、送信不良部分の特定は、RF受信器48内の判定部412ではなく、例えば、制御側無線通信装置300のデータ受信部316内で実行してもよい。或いは、送信不良の有無の判定、及び、送信不良部分の特定は、画像再構成部56内で実行されてもよい。
以上が4つの無線通信経路に関する説明である。
図4においてシステム制御部52は、入力装置62を介して操作者が入力した撮像条件に基づいて、パルスシーケンスにおける繰り返し時間、RFパルスの種別、RFパルスの中心周波数、及び、RFパルスの帯域幅などの撮像条件を決定する。システム制御部52は、このように決定した撮像条件をパルス波形生成部404に入力する。
パルス波形生成部404は、上記のようにシステム制御部52から入力される撮像条件に応じて、固定周波数生成部406から入力される基準クロック信号を用いてベースバンドのパルス波形信号を生成する。パルス波形生成部404は、ベースバンドのパルス波形信号を周波数アップコンバージョン部402に入力する。
周波数アップコンバージョン部402は、ベースバンドのパルス波形信号に対して、可変周波数生成部408から入力されるローカル信号を乗算し、さらにフィルタリングによって所望の信号帯域のみを通過させることで、周波数変換(アップコンバージョン)を実施する。周波数アップコンバージョン部402は、このようして周波数が上げられたベースバンドのパルス波形信号をRF送信器46に入力する。RF送信器46は、入力されたパルス波形信号に基づいて、RFパルスを生成する。
図5は、各記憶素子160a〜160fに記憶されるMR信号のデータ型式の説明図である。図5では、位相エンコード及び周波数エンコードのステップ数が256×256であるが、これは一例にすぎず、各ステップ数は256以外でもよい。図5において、TRは繰り返し時間であり、横方向のTsはサンプリング時間(Sampling Time)であり、縦方向は位相エンコードステップ(Phase Encode Step)である。
この場合、例えば位相エンコードを256回変えて、256ラインのMR信号が1画像用に収集される。具体的には、コイル素子(106a〜106f)で検出されたアナログの1ラインのMR信号は、A/D変換器(140a〜140f)において搬送周波数の正弦波又は余弦波がそれぞれ差し引かれて、デジタル化される。即ち、1ライン(位相エンコードステップ1つ分)のMR信号は、サンプリング時間内で、時間軸方向に離散して多数のデジタル値を持つデータに変換される。各デジタル値は、例えば、その受信時刻でのMR信号の強度を示す。
このデジタル化されたMR信号が、1ライン毎に順次、記憶素子160a〜160fに記憶されると共に、P/S変換器144に入力される。1ラインと、次のラインの区切りは、ゲート信号で区別される。即ち、本実施形態では一例として、各記憶素子160a〜160fは、上記のような周波数空間のデジタルデータとしてMR信号をバックアップ(記憶)する。
判定部412は、デジタル化されたMR信号に所定の信号処理を施すことでMR信号の生データを生成後、以下のようにして送信不良の有無を判定する。例えば、ホワイトノイズに相当するデータ値が所定数連続している場合、判定部412は、送信不良として判定する。また、同じデータ値が所定数連続している場合、判定部412は、送信不良として判定する。
判定部412は、例えば、ホワイトノイズに相当するデータ値が所定数連続している部分や、同じデータ値が所定数連続している部分をデータの送信不良部分として特定する。また、判定部412は、例えば、どのコイル素子106a〜106fで検出されたMR信号における、どの位相エンコードステップのラインが送信不良であるかを特定する。
この場合、送信不良は、例えば、MR信号の1ライン毎に判定され、送信不良部分の再送信もMR信号の1ライン毎に実行される。但し、これは一例にすぎず、1画像分のMR信号毎に送信不良の有無を判定し、1画像分のMR信号単位で、MR信号の再送信が実行される構成でもよい。
また、第1の実施形態では、MR信号の無線通信経路がアンテナ206a−306a間のみであるが、無線通信経路が複数存在する場合、無線通信経路毎に、送信不良の有無の判定、及び、送信不良部分の特定が実行されることが望ましい。
例えば、1つの制御側無線通信装置300に胸部用RFコイル装置100Aのコイル側無線通信装置200Aが近接固定され、別の制御側無線通信装置300に腰部用RFコイル装置100αのコイル側無線通信装置200Aが近接固定される場合を考える。その場合、判定部412は、RFコイル装置(100A、100α)毎に、且つ、その内部のコイル素子毎に、どの部分のデータが送信不良かを特定する。
なお、P/S変換器144に入力される各ラインのMR信号は、前述のように無線送信された後、最終的には画像再構成部56で図5のように位相エンコードステップ毎に並べられ、マトリクスデータに変換される。具体的には、図5の横方向である各MR信号のサンプリング時間Tsを256で等間隔に割ったΔTs毎に、MR信号の(例えば代表的な或いは平均的な)強度を各マトリクス要素のマトリクス値にする。
これにより、実数部分(上記余弦関数が差し引かれた方)と、虚数部分(上記正弦関数が差し引かれた方)のそれぞれについて、256行256列のマトリクスデータが生成される。画像再構成部56は、これら2つのマトリクスデータをk空間データとして保存する。
ここで、各記憶素子160a〜160fによるMR信号のバックアップに際しては、スキャン実行中であるか否かの判定、及び、スキャンの開始タイミングの判定が重要である。以下、図6〜図8を用いて、その方法の数例について説明するが、スキャン中であるか否かは、例えば、励起用RFパルスが送信されているか否かで判定できる。
図6は、アクティブトラップ回路170の場合における、スキャン実行中であるか否かの判定方法の一例を示す模式的回路図である。RFコイル装置100Aのカバー部材104内には、選択制御部108とコイル素子106aとの間に、アクティブトラップ回路170が配置されている。
アクティブトラップ回路170は、コンデンサCAと、PINダイオードD1と、コイルL3とを有し、これらはコイル素子106aに対して図6のように配線される。コンデンサCA−PINダイオードD1−コイルL3のループの回路の共振周波数がラーモア周波数となるように、コイルL3のインダクタンスや、コンデンサCAの容量や、PINダイオードD1の順方向の抵抗値などが選択されている。この場合、選択制御部108は、ゲート信号に基づいてスキャン実行中であるか否かを判定できる。
具体的には、コイル素子106aが受信用に選択されている場合、選択制御部108は、ゲート信号受信部224から入力されるゲート信号のオン期間において、PINダイオードD1に順方向に立ち上がり電圧を印加する。このため、ゲート信号のオン期間において、PINダイオードD1はオン状態(導通状態)になる。
また、ゲート信号のオン期間では、ラーモア周波数の励起用RFパルスが被検体Pに送信されているため、コンデンサCA−PINダイオードD1−コイルL3のループの回路がラーモア周波数で共振し、ハイインピーダンスとなる。これにより、コイル素子106aは、コンデンサCAの部分でループが途切れた状態となるので、MR信号を検出できない。
従って、選択制御部108は、ゲート信号受信部224から入力されるゲート信号にオン期間がある場合、その期間から開始して所定期間はスキャン中であると判定する。ここでの所定期間は、例えば、MR信号の収集に要する期間であり、繰り返し時間などの撮像条件基づいて予め決定できる。
なお、コイル素子106aが受信用に選択されていない場合、選択制御部108は、PINダイオードD1に順方向に立ち上がり電圧を印加し続ける。これにより、コイル素子106aはMR信号を検出できないので、受信用に選択された他のコイル素子(106b〜106f)とのカップリングが防止される。
図7は、パッシブトラップ回路の場合における、スキャン実行中であるか否かの判定方法の一例を示す模式的回路図である。パッシブトラップ回路172は、コイルL4と、コンデンサCBと、クロスダイオードCRとして並列接続されたダイオードD2、D3とを有し、これらはコイル素子106aに対して図7のように配線される。
コイルL4−コンデンサCB−クロスダイオードCRのループの回路の共振周波数がラーモア周波数となるように、コイルL4のインダクタンス、コンデンサCBの容量や、ダイオードD2、D3の順方向の抵抗値などが選択されている。電流検出器174は、クロスダイオードCRに流れる電流値を検出し、選択制御部108に入力する。
以下、パッシブトラップ回路172の動作について説明する。
ラーモア周波数の励起用RFパルスが被検体Pに送信されると、励起用RFパルスのエネルギーは大きいので、クロスダイオードCRに瞬間的に電流が流れる。これにより、コイルL4−コンデンサCB−クロスダイオードCRのループの回路が共振し、ハイインピーダンスとなる。このため、コイル素子106aは、コンデンサCBの部分でループが途切れた状態となるので、MR信号を検出できない。
ここで、核磁気共鳴により被検体Pから放射されるMR信号は、励起用RFパルスよりもエネルギーが微弱であるため、ダイオードD2、D3を立ち上がり電圧にするほどの電流が順方向に流れない。従って、励起用RFパルスが送信されていない期間では、パッシブトラップ回路172はオン状態(高周波電流に対して、コンデンサCBの部分を介して導通状態)となる。即ち、励起用RFパルスが送信されていない期間では、コイル素子106aは、ループは途切れていない状態となり、MR信号を検出できる。
また、励起用RFパルスの送信後、繰り返し時間などの撮像条件に応じた一定期間の間にMR信号の収集が実行される。従って、選択制御部108は、クロスダイオードCRに流れる電流値を電流検出器174から取得し、この取得した電流値に基づいてスキャン中であるか否かを判定する。即ち、選択制御部108は、クロスダイオードCRに所定値以上の大きさの電流が流れていることを検出した場合、この検出タイミングから一定期間ではスキャンが実行中であると判定する。
励起用RFパルスが送信されている期間では、上記のようにループを途切れた状態にしてコイル素子106aを保護することが望ましく、本実施形態では図6又は図7のトラップ回路(170、172)が構成される。図6、図7ではコイル素子106aの部分について説明したが、他のコイル素子106b〜106fのトラップ回路についても、構成は図6又は図7と同様である。
なお、パッシブトラップ回路172の場合、選択制御部108は、クロスダイオードCRに流れる電流値ではなく、クロスダイオードCRの電圧値に基づいて、スキャン中であるか否かを判定してもよい。この場合、電流検出器174に代えて電圧検出器を設ければよい。
上記パッシブトラップ回路172の場合、コイル素子106b〜106fは、受信用に選択されているか否かに拘らず、MR信号を検出する。パッシブトラップ回路172の場合、コイル素子106b〜106fの内、受信用に選択されたコイル素子(106b〜106f)で検出されたMR信号のみがA/D変換され、前述のように記憶及び無線送信される。
パッシブトラップ回路172の場合、そのオンオフの制御が不要という利点はあるが、MR信号の受信中にコイル素子106a〜106f同士のカップリングが(アクティブトラップ回路170のように)防止されることはない。従って、コイル素子106a〜106f同士のカップリングを防止するため、1つのコイル素子106a〜106fに対して、アクティブトラップ回路170と、パッシブトラップ回路172とを1つずつ設けてもよい。この場合、パッシブトラップ回路172については制御不要であり、アクティブトラップ回路170についてはゲート信号に基づいて上記同様に制御すればよい。
図8は、励起用RFパルスの送信タイミングにより、スキャンの開始タイミングを判定する方法の一例を示す説明図である。図8において、横軸は、パルスシーケンスの開始からの経過時間tを示す。図8の上段は、励起用RFパルスの波形の送信タイミングを示し、下段はアクティブトラップ回路170のPINダイオードD1の電圧値を示す。
図8に示すように、アクティブトラップ回路170の場合、励起用RFパルスが送信されている期間(ゲート信号のオン期間)において、PINダイオードD1はオン状態になり、その両端の電圧は立ち上がり電圧となる。従って、選択制御部108は、ゲート信号のオフ期間が「第1の所定期間」以上続いた後、ゲート信号がオンになれば、そのオンのタイミングを「次のスキャンの開始タイミング」として判定できる。ここでの「第1の所定期間(図8参照)」は、例えば、撮像条件に応じて選択制御部108が決めればよい。
記憶制御部152は、次のスキャンの開始タイミングを選択制御部108からリアルタイムで取得し、次のスキャンの開始タイミングに同期して、記憶素子160a〜160f内のデータ消去を開始してもよい。スキャンの始めは通常、画像生成用のMR信号の収集ではなく、受信ゲインを決めるプレスキャンが実行されるからである。即ち、次のスキャンの開始タイミングの直後にデータ消去を開始しても、次のスキャンにおける画像生成用のMR信号をデジタル化して記憶する前に、データ消去を終了できるからである。
一方、コイル素子106a〜106fのトラップ回路としてパッシブトラップ回路172が用いられる場合、選択制御部108は、例えば以下のようにしてスキャンの開始タイミングを判定する。具体的には、選択制御部108は、クロスダイオードCRを流れる電流値を電流検出器174により一定の時間間隔で常時検出させる。選択制御部108は、クロスダイオードCRに電流が「第2の所定期間」以上流れなかった後に、クロスダイオードCRに電流が流れたタイミングを、次のスキャンの開始タイミングとして判定する。ここでの「第2の所定期間」は、図8の「OFF PERIOD」に相当し、例えば撮像条件に応じて決めればよい。
スキャン開始のタイミングを上記のように判定できれば、繰り返し時間やスライス数などの撮像条件と、スキャン開始時刻とに基づいて、選択制御部108はスキャン終了時刻を判定できる。
次に、MR信号のデータの送信不良があった場合における、手動によるデータ回収方法の一例について説明する。第1の実施形態のMRI装置20Aでは一例として、MR信号のデータの送信不良があった場合、記憶素子(160a〜160f)に記憶されたデータが用いられ、本スキャン終了後に送信不良部分が自動的に再送信される。
判定部412は、この再送信されたデータに送信不良があったか否かを判定する。正常に実行されなかった場合、判定部412は、どのコイル素子(106a〜106f)で検出されたデータかを含めて、データの送信不良部分を前述のように特定し、特定結果をシステム制御部52に入力する。システム制御部52は、検出データの送信不良があったと判定されたコイル素子(106a〜106f)に対応する記憶素子(160a〜160f)を、表示装置64に表示させる。
図9は、手動によるデータ回収方法のガイド表示の一例を示す模式図である。システム制御部52は、取り出すべき記憶素子(160a〜160fのいずれか)を特定する情報を表示装置64に表示させる。図9の表示例では、コイル素子106bで検出されたMR信号の少なくとも一部に送信不良があり、コイル素子106bに対応する記憶素子160bを取り出して後述のデータ回収部600に接続するように、表示されている。
各記憶素子160a〜160fは、前述のように離脱自在であるが、例えば各記憶素子160a〜160fの表面に識別番号等を付すことで、視覚的に互いに識別可能にしておくことが望ましい。
複数の記憶素子がRFコイル装置100A内に含まれる場合、上記のように、送信不良となったデータが記憶されている記憶素子(160a〜160fのいずれか)を特定する情報を表示することが望ましい。一方、RFコイル装置100Aに内蔵された1つの記憶素子のみで全コイル素子106a〜106fの検出データをバックアップする場合、記憶素子を取り出してデータ回収部に接続するように、ガイド表示すればよい。
図10は、データ回収部600の配置の一例を示す模式的斜視図である。図10の例では、データ回収部600は、撮像室のガントリ21の入口、及び、寝台32に1つずつ設けられているが、データ回収部600の数は1つでも3つ以上でもよい。また、配置態様も、図10の態様には限定されず、例えば制御室内に設けてもよい。
各データ回収部600は、内部配線によりRF受信器48に接続されており、記憶素子160a〜160fと同じタイプの接続ポートを有する。各データ回収部600には、システム制御部52(又は判定部412)から、データの送信不良部分を特定する情報が入力される。記憶素子(160a〜160f)が接続された場合、各データ回収部600は、この入力情報に基づいて、データの送信不良部分を記憶素子(160a〜160f)から読み込み、RF受信器48に入力する。
データの送信不良部分は、周波数ダウンコンバージョン部410で周波数ダウンコンバージョンが施された後、判定部412内で所定の信号処理が施され、画像再構成部56に入力される。画像再構成部56は、データの送信不良部分を補償し、補完されたMR信号の生データに基づいてk空間データを生成(補正)及び保存する。なお、どちらのデータ回収部600に記憶素子(160a〜160f)を接続しても、同様にしてMR信号のデータが回収される。
また、送信不良を防止するために、システム制御部52は、RFコイル装置100Aからの識別情報の取得を定期的に実行させ、コイル側無線通信装置200Aと、制御側無線通信装置300とが正常に接続されていることを常時確認する。システム制御部52は、RFコイル装置100Aからの識別情報を正常に取得できなくなった場合、両者の接続状況が正常ではなくなった旨の警告指令を出力する。
図11は、胸部用のRFコイル装置100Aに加え、腰部用のRFコイル装置100αが使用され、無線通信が正常ではない場合の警告表示の一例を示す模式図である。図11では一例として、胸部用のRFコイル装置100Aのコイル側無線通信装置200と、制御側無線通信装置300との無線通信は正常であるが、腰部用のRFコイル装置100αのコイル側無線通信装置と、制御側無線通信装置300との無線通信が正常ではない。
従って、システム制御部52は、警告指令を表示装置64に入力し、どのRFコイル装置と、どの制御側無線通信装置300との無線通信が正常ではないかの情報を表示装置64に表示させる。この情報は、天板34における制御側無線通信装置300の配置図と共に、画面下側の文字情報によっても示される。
即ち、表示装置64は、無線通信が正常ではない場合に、無線通信が正常ではない旨を通知する通知部としても機能する。なお、無線通信が正常ではない旨の通知は、表示に限らず、例えば、警告音で実行してもよい。或いは、無線通信が正常ではない旨の通知は、適切な位置に発光ダイオードなどを設けることで、赤色で点滅などの発光により実行してもよい。
図12は、第1の実施形態におけるMRI装置20Aによる撮像動作の流れの一例を示すフローチャートである。以下、前述の各図を適宜参照しながら、図12に示すステップ番号に従って、MRI装置20Aの動作を説明する。なお、ここでは上記RFコイル装置100Aを用いる例を説明するが、他のRFコイル装置を用いる場合も、コイル無線通信装置200Aと同様の構成を設けることで第1の実施形態と同様の効果が得られる。
[ステップS1]天板34がガントリ21外にある状態で、天板34上の被検体PにRFコイル装置100Aが装着され、例えば最も近い位置の制御側無線通信装置300に対してコイル側無線通信装置200Aが離脱自在に近接固定される(図2、図3参照)。上記近接固定により、コイル側無線通信装置200Aと制御側無線通信装置300とが互いに通信可能範囲内に入ると、両者間において上述した電力供給及び無線通信が開始される。
具体的には、ID送信部222は、ID受信部322から無線送信される電力に基づいて動作することで、RFコイル装置100Aの識別情報をID受信部322に無線送信する(図4参照)。ここで、各制御側無線通信装置300のアンテナ306cは例えば、天板34がガントリ21内に挿入されていない期間には一定の時間間隔で電磁波を常時出力している。このため、コイル側無線通信装置200Aが通信可能範囲に固定されると、識別情報の無線送信がすぐに開始される。
システム制御部52は、この識別情報を取得し、RFコイル装置100Aが現在接続されていることを認識する。これにより、システム制御部52は、コイル側無線通信装置200Aと制御側無線通信装置300との間のさらなる通信を許可すると共に、電力供給部320から電力受給部220への電力供給を実行させる。このため、電力供給部320及び電力受給部220は、前述のように誘導磁界を介して、コイル側無線通信装置200Aの各部やRFコイル装置100Aの各部に電力供給を開始する。
その後、天板駆動装置50(図1参照)は、システム制御部52の制御に従って、ガントリ21内に天板34を移動させる。
また、システム制御部52は、RFコイル装置100Aの識別情報をコイル側無線通信装置200Aから取得する処理を、少なくともパルスシーケンスの終了まで、一定の時間間隔で継続的に実行させる。即ち、システム制御部52は、コイル側無線通信装置200Aと制御側無線通信装置300との接続を常時確認し、上記識別情報を正常に取得できなくなった場合、警告指令を出力して表示装置に警告を表示させる(図11参照)。
但し、天板34がガントリ21外に戻って記憶素子(160a〜160f)が取り外される場合のステップS11、S12の期間では、当該処理は実行されない。従って、警告表示は、ステップS10までの任意のタイミングで実行される可能性がある。
この後、ステップS2に進む。
[ステップS2]システム制御部52は、パルスシーケンスのスタンバイ状態となるように、MRI装置20Aの各部を制御する。具体的には、参照信号送信部318は、システム制御部52による通信許可に従って、アンテナ306b−206b間の例えば誘導電界を介した無線通信経路により、参照信号受信部218に対して、デジタルの参照信号を入力する。なお、送信される参照信号には、サンプリングのタイミングを決めるためのトリガ信号も重畳される。
ここでは一例として、参照信号受信部218は、スキャンの始めのみ参照信号を受信後、受信した参照信号内の立ち上がりや立ち下がり等のタイミングに適合させて、参照信号の生成を開始する。参照信号受信部218は、生成した参照信号を各A/D変換器(140a〜140f)に対して、本スキャン終了まで継続的に入力する。これにより、コイル側無線通信装置200Aと制御側無線通信装置300との間に通信阻害が生じた場合にも、コイル素子(106a〜106f)で検出されたMR信号は、A/D変換器(140a〜140f)で正常にA/D変換されてから、記憶素子(160a〜160f)に記憶される。
この後、ステップS3に進む。
[ステップS3]参照信号受信部218から各A/D変換器(140a〜140f)に対して参照信号が入力され始めた後、RFコイル装置100Aの選択制御部108は、データの消去指令を記憶制御部152に入力する。記憶制御部152は、データの消去指令を受けたタイミングに同期して、全記憶素子160a〜160f内の全データの消去を開始する。これにより、全記憶素子160a〜160fにおいて、使用領域はなくなり、MR信号のデータを最大限でバックアップ可能となる。
この後、ステップS4に進む。
[ステップS4]システム制御部52は、入力装置62を介してMRI装置20Aに対して入力された撮像条件や、ステップS1で取得した使用コイルの情報(この例ではRFコイル装置100Aを用いること)に基づいて、本スキャンの撮像条件の一部を設定する。
この後、ステップS5に進む。
[ステップS5]システム制御部52は、MRI装置20Aの各部を制御することで、プレスキャンを実行させる。プレスキャンでは、例えば、RFパルスの中心周波数の補正値が算出され、RFコイル装置100A内の各コイル素子106a〜106fの感度分布マップが生成される。この後、ステップS6に進む。
[ステップS6]システム制御部52は、プレスキャンの実行結果に基づいて、本スキャンの残りの撮像条件を設定する。撮像条件には、本スキャンにおいて受信に用いるコイル素子(106a〜106fの少なくとも1つ)の情報も含まれる。
従って、システム制御部52は、本スキャンで受信に用いるコイル素子の情報を、いずれかの無線通信経路でRFコイル装置100Aの選択制御部108に入力する。受信に用いるコイル素子の情報は、例えば、ゲート信号送信部324からゲート信号受信部224に無線送信された後、ゲート信号受信部224から選択制御部108に入力される。
この後、ステップS7に進む。
[ステップS7]システム制御部52は、MRI装置20Aの各部を制御することで、本スキャンを実行させる。具体的には、静磁場電源40により励磁された静磁場磁石22によって撮像空間に静磁場が形成される。また、シムコイル電源42からシムコイル24に電流が供給されて、撮像空間に形成された静磁場が均一化される。
なお、コイル素子106a〜106fのスイッチがアクティブトラップ回路170である場合、アンテナ306d−206d間では、ゲート信号送信部324からゲート信号受信部224に前述のゲート信号が本スキャンの実行中に継続的に無線送信される。
この後、入力装置62からシステム制御部52に撮像開始指示が入力されると、以下の<1>〜<4>の処理が順次繰り返されることで、被検体PからのMR信号が収集される。
<1>システム制御部52は、パルスシーケンスに従って傾斜磁場電源44、RF送信器46及びRF受信器48を駆動させることで、被検体Pの撮像部位が含まれる撮像領域に傾斜磁場を形成させると共に、送信用RFコイル28から被検体PにRFパルスを送信させる。
なお、各コイル素子106a〜106fのスイッチがアクティブトラップ回路170である場合、RFパルスが被検体Pに送信される期間のみ、ゲート信号は例えばオンレベルにされ、各コイル素子106a〜106fはオフ状態となる。これにより、カップリングが防止される。
<2>各コイル素子106a〜106fのスイッチがアクティブトラップ回路170である場合、RFパルスの送信後、ゲート信号は例えばオフレベルに切り替えられる。そして、選択制御部108により選択されたコイル素子(106a〜106fの少なくとも1つ)により、被検体P内の核磁気共鳴により生じたMR信号が検出される。検出されたアナログのMR信号は、各コイル素子(106a〜106f)から、対応するA/D変換器(140a〜140f)にそれぞれ入力される。なお、選択されていないコイル素子に対応するA/D変換器(140a〜140f)は、動作しない。
<3>選択制御部108により選択されたコイル素子に対応する各A/D変換器(140a〜140f)は、参照信号受信部218から入力される参照信号に基づいて、対応するコイル素子から入力されるMR信号のサンプリング及び量子化を開始する。そして、A/D変換器(140a〜140f)は、デジタル化したMR信号をP/S変換器144に入力する。
P/S変換器144は、入力されたMR信号をシリアル信号に変換し、これをデータ送信部216に入力する。データ送信部216は、シリアルのMR信号に所定の処理を施すことで無線送信用のMR信号を生成し、これをアンテナ206aからアンテナ306aに向けて、誘導電界を介して無線送信する。
<4>データ受信部316は、アンテナ306aで受信した無線送信用のMR信号に所定の処理を施すことで元のデジタルのMR信号を抽出し、抽出したMR信号を周波数ダウンコンバージョン部410に入力する。周波数ダウンコンバージョン部410は、入力されるMR信号の周波数ダウンコンバージョンを実行し、周波数が落とされたMR信号を判定部412に入力する。判定部412は、所定の信号処理を施すことで、MR信号の生データを生成する。
判定部412は、生成したMR信号の生データに対して、前述の手法により、送信不良に該当するか否かを判定する。判定部412は、送信不良に該当すると判定した場合、例えば、ホワイトノイズに相当するデータ値が所定数連続している部分や、同じデータ値が所定数連続している部分をデータの送信不良部分として特定する。この例では、判定部412は、どのコイル素子106a〜106fで検出されたMR信号における、どの位相エンコードステップのラインが送信不良であるかを特定する。
判定部412は、送信不良に該当しないMR信号の生データについては、そのまま画像再構成部56に入力する一方、送信不良に該当するMR信号の生データについては、例えば置換用データに代えて画像再構成部56に入力する。置換用データは、例えば全てのデータが最大輝度を示すものであり、画像再構成部56により、送信不良部分のデータとして認識される。画像再構成部56は、入力されたMR信号の生データをk空間データに変換して保存する。
以上の<1>〜<4>の処理が繰り返されることで、本スキャンとしてのMR信号が収集される。この本スキャンの実行時において、図8で説明したように、本スキャンの開始タイミングが選択制御部108により判定される。そして、記憶制御部152は、本スキャンの開始タイミングに同期して、記憶素子160a〜160f内のデータ消去を開始させ、データ消去は、MR信号で収集されるMR信号の記憶の開始前には終了する。
また、この本スキャンの実行時において、引き続き本スキャンが実行中であるか否かが選択制御部108により判定される。この判定方法については、アクティブトラップ回路170の場合、パッシブトラップ回路172のそれぞれの場合について図6、図7で述べてので、ここでは説明を省略する。
本スキャンが実行中の期間において、選択制御部108は、記憶制御部152を制御して、(無線送信前の)MR信号のデータのバックアップを実行させる。即ち、選択されたコイル素子に対応するA/D変換器(140a〜140fの少なくとも1つ)でデジタル化されたMR信号は、当該A/D変換器に対応する記憶素子(160a〜160fの少なくとも1つ)に記憶される。これにより、選択されたコイル素子で検出された全てのMR信号のデータがバックアップされる。
以上の本スキャン、及び、MR信号のデータのバックアップが終了後、ステップS8に進む。
[ステップS8]ステップS7の本スキャンにおいて送信不良がなかった場合、判定部412は、送信不良がなかった旨をシステム制御部52に入力する。この場合、ステップS13に進む。
一方、ステップS7の本スキャンにおいて送信不良があった場合、判定部412は、送信不良があった旨、及び、データの送信不良部分を特定する情報をシステム制御部52に入力する。この場合、ステップS9に進む。
[ステップS9]システム制御部52は、データの送信不良部分を特定する情報を、いずれかの無線通信経路からRFコイル装置100Aの選択制御部108に送信する。システム制御部52は、データの送信不良部分を特定する情報を、例えばゲート信号送信部324からゲート信号受信部224に無線送信させる。この場合、ゲート信号受信部224は、データの送信不良部分を特定する情報を選択制御部108に入力する。
選択制御部108は、記憶制御部152を制御して、送信不良となったデータを記憶している記憶素子(160a〜160fのどれか)から、当該送信不良となったデータをP/S変換器144に入力させる。この後、送信不良となったデータは、前述同様に誘導電界を介して再度無線送信され、周波数ダウンコンバージョンが施され、判定部412に入力される。この後、ステップS10に進む。
[ステップS10]判定部412は、ステップS9で入力されたMR信号のデータに所定の信号処理を施してMR信号の生データを生成し、これが送信不良に該当するか否かを前述同様に判定する。判定部412は、判定結果をシステム制御部52に入力する。
送信不良に該当しない場合、判定部412は、このステップS10で生成したMR信号の生データを画像再構成部56に入力する。そして、画像再構成部56は、前述の置換用データの部分を、このステップS10で入力されたデータと置換することで送信不良部分を補償する。画像再構成部56は、このように補完されたMR信号の生データに基づいて、k空間データを補正して保存する。この後、ステップS13に進む。
一方、送信不良に該当する場合、システム制御部52(又は判定部412)は、データの送信不良部分を特定する情報を各データ回収部600に入力する。この後、ステップS11に進む。
[ステップS11]システム制御部52は、取り出すべき記憶素子(160a〜160fのいずれか)を特定する情報を表示装置64にガイド表示させる(図9参照)。「取り出すべき記憶素子」とは、送信不良となったデータを記憶している記憶素子である。また、天板駆動装置50は、記憶素子の取り外しのため、システム制御部52の制御に従って天板34をガントリ21外に移動させる。また、システム制御部52は、RFコイル装置100Aからの識別情報の取得処理を停止させる。この後、ステップS12に進む。
[ステップS12]操作者により、RFコイル装置100Aから、ステップS11のガイド表示で特定された記憶素子(160a〜160fのいずれか)が取り外され、これがデータ回収部600に接続される。記憶素子(160a〜160f)が接続された場合、データ回収部600は、データの送信不良部分を記憶素子(160a〜160f)から読み込み、RF受信器48に入力(転送)する。データ回収部600は、データの送信不良部分を転送後、接続された記憶素子(160a〜160f)内のデータを消去する。
データの送信不良部分は、周波数ダウンコンバージョンが施された後、判定部412内で所定の信号処理が施され、画像再構成部56に入力される。画像再構成部56は、前述の置換用データの部分を、このステップS12で入力されるMR信号の生データと置換することで送信不良部分を補償し、ステップS10と同様にk空間データを補正して保存する。この後、ステップS13に進む。
[ステップS13]同一の被検体Pの次のパルスシーケンスがない場合、システム制御部52は、ステップS14に処理を移行させる。
一方、同一の被検体Pの次のパルスシーケンスがある場合、システム制御部52は、以下の2つの場合に分けてステップS2に処理を戻す。
第1に、ステップS11、S12の処理が実行されなかった場合、システム制御部52は、RFコイル装置100Aからの識別情報の取得処理を継続させた状態で、ステップS2に処理を戻す。
第2に、ステップS11、S12の処理が実行された場合、システム制御部52は、データ回収部600に接続された記憶素子をRFコイル装置100Aの所定位置に再接続するように促す情報を表示装置64に表示させる。この後、記憶素子が正常にデータ保護部150内に再接続された場合、RFコイル装置100Aの選択制御部108は、ID送信部222に識別情報の送信を再開させ、システム制御部52は、RFコイル装置100Aからの識別情報の取得処理を再開する。その後、天板駆動装置50は、システム制御部52の制御に従ってガントリ21内に天板34を移動させる。この後、ステップS2に戻る。
[ステップS14]画像再構成部56は、フーリエ変換等を含む画像再構成処理をk空間データに施すことで画像データを再構成し、得られた画像データを画像データベース58に保存する。この後、画像処理部60は、画像データベース58から画像データを取り込み、これに所定の画像処理を施すことで表示用画像データを生成し、この表示用画像データを記憶装置66に保存する。システム制御部52は、表示用画像データを表示装置64に転送し、表示用画像データが示す画像を表示装置64に表示させる。
撮像の終了後、(天板34がガントリ21外に移動してから)コイル側無線通信装置200Aが制御側無線通信装置300から離脱され、両者が通信可能範囲外となると、両者間の通信及び電力供給は終了する。
以上が第1の実施形態のMRI装置20Aの動作説明である。
以下、第1の実施形態の効果について説明する。
第1の実施形態では、無線通信時において送信側及び受信側が互いに近接固定され、誘導電界を介した無線通信が行われる。このため、従来のデジタル無線通信よりも無線の出力を低く抑えられるから、種々の国の法規制に対応し易い。
送信側と受信側とが近接していることに加えて、無線の出力を低くできるため、送信電波が周りで反射してコイル素子106a〜106fによる被検体PからのMR信号の検出を妨げる問題も生じない。従って、RFコイル装置100A側からMRI装置20Aの本体側(RF受信器48側)にデジタルのMR信号を良好に無線送信できる。
また、複数のコイル素子(106a〜106f)が受信用に選択された場合、複数のコイル素でそれぞれ検出された複数のMR信号は、シリアル信号に変換されて、無線送信される。従って、MR信号の送信用のアンテナ(無線通信経路)を1組で済ませることができる上、MR信号同士の間では、干渉を防止するための周波数分離を行う必要はない。
これに対し、従来のデジタル無線通信では、送信側の遠方界に受信側が存在するので、MR信号の受信用の複数のコイル素子が同時に接続された場合にはクロストークなどの干渉が生じるため、周波数分離や時分割の通信を行っている。本実施形態のように近距離の無線通信では、時分割にする必要はない。
また、制御側無線通信装置300を複数の箇所に設け、いずれか1つの制御側無線通信装置300に対してコイル側無線通信装置200Aを固定すればよい構成である。従って、被検体Pのどの位置に装着されるRFコイル装置であっても、即ち、天板34上のどの位置にRFコイル装置100Aが存在しても、コイル側無線通信装置200Aと制御側無線通信装置300とを近接固定し、MR信号を良好に無線送信できる。
また、RFコイル装置100Aへの電力供給やゲート信号の送信、トリガ信号の送信についても無線で行うので、MRI装置20Aの構成を簡単化できる。この結果、MRI装置20Aの製造コストを低減しうる。
さらに、RFコイル装置100A内において、受信用に選択されたコイル素子(106a〜106f)で検出されたMR信号は、当該コイル素子に対応する記憶素子160a〜160fに記憶される。そして、MR信号のデータの送信不良があった場合、送信不良部分が判定部412により特定され、送信不良部分が自動的に再度無線送信される。従って、通信阻害によるMR信号のデータの送信不良を補償し易い構成である。
また、上記の送信不良部分の再度の無線送信によってもデータの送信不良部分が補償されない場合、送信不良部分のデータが記憶されている記憶素子の識別情報がガイド表示される。従って、ガイド表示に従って、該当する記憶素子をRFコイル装置100Aから取り外して、データ回収部600に接続するだけで、データの送信不良部分を補償することができる。
また、システム制御部52は、コイル側無線通信装置200Aの接続状況を常時確認し、RFコイル装置100Aの識別情報を正常に取得できなくなった場合、表示装置に警告を表示させる(ステップS1の説明及び図11参照)。従って、接続不良のまま本スキャンが実行されること、即ち、MR信号のデータの送信不良が生じることを防止できる。
また、記憶素子160a〜160fは電界シールド156内にあるので、静磁場や傾斜磁場等の電磁気的な影響を受けることなく、MR信号のデータを確実にバックアップできる。
また、記憶素子160a〜160fは、電気的にデータを記憶及び消去する。このため、記憶素子160a〜160fに対する読み書きが磁気的にイメージングに影響することはない。
また、記憶素子160a〜160fを離脱自在な構成とし、記憶素子160a〜160fにバックアップされたデータを手動で接続して回収するデータ回収部600が設けられている。従って、停電等の事態が生じても、それまでに検出及びバックアップされたMR信号のデータを確実に回収できる。
また、コイル素子106a〜106fにそれぞれ対応する記憶素子160a〜160fを設け、各記憶素子(160a〜160f)は、対応するコイル素子(106a〜106f)で検出されたMR信号のデータのみを記憶する。そして、送信不良の際の手動によるデータ回収時には、どの記憶素子のデータを回収すべきかがガイド表示される(ステップS11、図9)。従って、手動によるデータ回収が容易である。
また、選択制御部108は、アクティブトラップ回路170の場合にはゲート信号に基づいて、パッシブトラップ回路172の場合にはクロスダイオードCR内の電流値に基づいて、本スキャンの開始タイミングを判定する。従って、本スキャンの開始タイミングを正確に判定できる。このように正確に判定された本スキャンの開始タイミングに同期して、記憶素子160a〜160f内のデータが一括消去される。従って、新たに収集されるMR信号のデータの記憶領域を適切なタイミングで確保できる。
また、選択制御部108及び記憶制御部152は、本スキャンの実行中において記憶素子160a〜160fにMR信号のデータをバックアップさせる。従って、MR信号のデータのバックアップ処理により、スキャン時間が延びることはない。
また、選択制御部108は、アクティブトラップ回路170の場合にはゲート信号に基づいて、パッシブトラップ回路172の場合にはクロスダイオードCR内の電流値に基づいて、本スキャンが引き続き実行中であるか否かを判定する。従って、選択制御部108は、本スキャン終了時には、スキャン終了をすぐに判定できるので、MR信号のデータのバックアップ処理の終了タイミングを決定し易い。
以上説明した第1の実施形態によれば、MRIにおいて、デジタル化されたMR信号をRFコイル装置からMRI装置の制御側に対して良好に無線送信することができる。また、通信阻害によるMR信号のデータの送信不良を補償できる。
次に、第2の実施形態のMRI装置20Bについて説明する。なお、第2の実施形態のMRI装置20Bは、第1の実施形態とは、バックアップされたMR信号のデータの回収方法のみが異なるので、違いのみ説明する。
図13は、第2の実施形態のMRI装置20Bの全体構成の一例を示す模式的なブロック図である。MRI装置20Bは、制御室において、システム制御部52、入力装置62、表示装置64、記憶装置66、システムバス54、画像再構成部56、画像データベース58、画像処理部60等を有する。なお、画像データベース58、画像処理部60については、図13では煩雑となるので図示していない(図1参照)。
また、MRI装置20Bは、撮像室において、データ回収型充電部(data-collecting type charging unit)620、ガントリ21、寝台32、天板34、静磁場電源40、シムコイル電源42、傾斜磁場電源44、RF送信器46、RF受信器48、胸部用のRFコイル装置100B等を有する。なお、寝台32、静磁場電源40、シムコイル電源42、傾斜磁場電源44、RF送信器46等については、図13では煩雑となるので図示していない(図1、図4参照)。
第2の実施形態の特徴の1つであるデータ回収型充電部620は、胸部用、腰部用などの各種の装着型のRFコイル装置が収納されるコイル棚610内に充電スタンドとして設置される。データ回収型充電部620は、ここでは一例として、内部配線によりRF受信器48に接続されている。
データ回収型充電部620にRFコイル装置100Bを収納すると、データ回収型充電部620は、RFコイル装置100Bの充電を開始すると共に、RFコイル装置100B内の記憶素子にバックアップされたMR信号のデータを読み込んでRF受信器48に送信する。
具体的には、RFコイル装置100Bは、カバー部材104’と、ケーブル102とを有する。カバー部材104’は、ケーブル102により、コイル側無線通信装置200Aに接続されている。カバー部材104’の構成は、以下の2点を除き、第1の実施形態のRFコイル装置100Aのカバー部材104と同様である。
第1に、カバー部材104’は、データ回収型充電部620に嵌合される接続部190を有する。第2に、カバー部材104’内には、接続部190及びデータ回収型充電部620経由で、データ保護部150内の記憶素子160a〜160fをRF受信器48に接続する配線が設けられている。
データ回収型充電部620は、カバー部材104’の接続部190を嵌合する形状の接続部622を有する。データ回収型充電部620の筐体は、接続部622とは反対側において、図3の固定部320に相当する形状部分を有し、これによりコイル側無線通信装置200Aを嵌合する形状である。また、データ回収型充電部620の筐体は、接続部622とは反対側において、図4の電力供給部320に相当する構成を有する。
このため、カバー部材104’及びコイル側無線通信装置200Aがそれぞれデータ回収型充電部620に嵌合されると、データ回収型充電部620は、誘導磁界により、ケーブル102を介してカバー部材104’内の充電池BAの充電を開始する。
また、データ回収型充電部620は、充電開始と共に、カバー部材104’内の記憶素子160a〜160fにバックアップされたMR信号のデータを読み込んでRF受信器48に送信する。
このとき、システム制御部52は、不図示の配線を介して、MR信号のデータにおける送信不良の部分の情報をデータ回収型充電部620に予め入力し、送信不良の部分のみをRF受信器48(の周波数ダウンコンバージョン部410)に送信させてもよい。RF受信器48(の判定部412)は、MR信号のデータにおける送信不良の部分を補償し、第1の実施形態と同様の処理を実行してから、MR信号の生データを画像再構成部56に入力する。
また、データ回収型充電部620は、RF受信器48に対するMR信号のデータの送信の終了後、接続部190、622を介した不図示の配線により、データ消去指令をカバー部材104’の記憶制御部152に入力する。記憶制御部152は、データ消去指令の受信に同期して、各記憶素子160a〜160fの記憶中のデータを消去する。
図14は、第2の実施形態に係るMRI装置20Bの動作の流れの一例を示すフローチャートである。以下、図14に示すステップ番号に従って、MRI装置20Bの動作を説明する。
[ステップS21〜S30]第1の実施形態の図12のステップS1〜S10とそれぞれ同様である。ステップS30において、MR信号のデータにおける送信不良部分を補償できなかった場合、ステップS31に進み、補償できた場合、ステップS32に進む。
[ステップS31]MR信号のデータに送信不良部分があった旨が図9と同様にガイド表示される。同時に、「パルスシーケンスの終了後に、RFコイル装置100B及びコイル側無線通信装置200Aをデータ回収型充電部620にセットして下さい」といったデータ回収を促すメッセージを、システム制御部52は表示装置64に表示させる。上記メッセージの「パルスシーケンスの終了後」は、ステップS32の後である。同一の被検体Pの次のパルスシーケンスがある場合、天板34がガントリ21内にある状態で、ステップS22に戻るからである。
従って、ここでは一例として、システム制御部52は、RFコイル装置100Bからの識別情報の取得処理を継続させた状態にする。この後、ステップS32に進む。
[ステップS32]第1の実施形態のステップS13と同様であり、同一の被検体Pの次のパルスシーケンスがない場合、システム制御部52は、ステップS33に処理を移行させる。
一方、同一の被検体Pの次のパルスシーケンスがある場合、システム制御部52は、RFコイル装置100Bからの識別情報の取得処理を継続させた状態で、ステップS22に処理を戻す。
[ステップS33]第1の実施形態のステップS14と同様に、画像再構成、及び、画像表示が実行される。但し、ステップS31の処理が実行された場合、画像再構成前に以下の処理が実行される。
具体的には、撮像の終了後、天板駆動装置50は天板34をガントリ21外に移動させる。そして、図13で説明したように、RFコイル装置100B及びコイル側無線通信装置200Aがデータ回収型充電部620にセットされ、MR信号のデータの送信不良部分の回収が実行される。これにより、データの送信不良部分が補償された後、画像再構成が開始される。以上が第2の実施形態のMRI装置20Bの動作説明である。
このように、第2の実施形態においても、第1の実施形態と同様の効果が得られる。第2の実施形態では、MR信号のデータの送信不良部分を補償できなかった場合、同一の被検体Pのパルスシーケンスの終了後、RFコイル装置100Bを充電する際に送信不良部分のデータ回収、及び、記憶素子160a〜160fのデータ消去が実行される。RFコイル装置100Bの充電時にデータ回収が実行されるので、第1の実施形態と同様、データ回収によりスキャン時間が延びることはない。
以下、上述した各実施形態の補足事項について説明する。
第1及び第2の実施形態では、データ保護部150がRFコイル装置100Aのカバー部材104内に配置される例を述べた。本発明の実施形態は、かかる態様に限定されるものではない。データ保護部150は、コイル側無線通信装置200A内に配置されてもよい。
或いは、データ保護部150は、P/S変換器144の後段に配置されてもよい。この場合、データ保護部150内の記憶素子は、シリアル信号に変換されたMR信号のデータをバックアップする。この場合、複数のコイル素子が受信用に選択されていても、これら複数のコイル素子で検出されたMR信号は、例えば1つの記憶素子に一括的にバックアップされてもよい。
第1の実施形態では、個々の本スキャンの開始時に、記憶素子160a〜160f内のデータを瞬時に消去する例を述べた。本発明の実施形態は、かかる態様に限定されるものではない。各記憶素子160a〜160fの記憶容量が十分大きい場合、例えば、1人の被検体Pに対する全てのパルスシーケンスが終了後に、記憶素子160a〜160f内のデータを消去してもよい。或いは、MRI装置20Aの再起動時に、記憶素子160a〜160f内のデータを消去してもよい。
複数の受信用のRFコイル装置が被検体に装着される場合、これらRFコイル装置を並列的に接続し、片方のRFコイル装置で受信されたMR信号のデータを双方のRFコイル装置内の各記憶素子で二重にバックアップしてもよい。
図15は、胸部用RFコイル装置100Cと、腰部用RFコイル装置100γとを各制御側無線通信装置300に対して並列的に接続した一例を示すブロック図である。この例では、図が煩雑となるので、胸部用RFコイル装置100Cと、腰部用RFコイル装置100γ内のコイル素子の数を2つずつとしているが、実際には3つ以上のコイル素子がそれぞれ配置されてもよい。
胸部用RFコイル装置100Cは、データ通信装置200C、カバー部材104c、及び不図示のケーブルを有し、ケーブルを介してコイル側無線通信装置200Aに接続される。胸部用RFコイル装置100Cに接続されたコイル側無線通信装置200Aは、一の制御側無線通信装置300に対して近接固定される。胸部用RFコイル装置100Cで検出されたMR信号は、これらコイル側無線通信装置200A−制御側無線通信装置300間で、上記同様に誘導電界を介して無線送信される。
腰部用RFコイル装置100γは、データ通信装置200C’、カバー部材104γ、及び不図示のケーブルを有し、ケーブルを介してコイル側無線通信装置200Aに接続されている。腰部用RFコイル装置100γに接続されたコイル側無線通信装置200Aは、胸部用RFコイル装置100C側とは別の制御側無線通信装置300に対して近接固定される。腰部用RFコイル装置100γで検出されたMR信号は、これらコイル側無線通信装置200A−制御側無線通信装置300間で、上記同様に誘導電界を介して無線送信される。
腰部用RFコイル装置100γのカバー部材104c内では、腰部からのMR信号の受信用に各コイル素子106α、106β等が配置されている。カバー部材104c内には、図4のカバー部材104と同様に充電池BAなどの構成要素も配置されるが、煩雑となるので図15では図示していない。
データ通信装置200C、200C’はそれぞれ、誘導電界結合型カプラなどの誘導電界を介した無線通信用の構成要素を有する。データ通信装置200Cの筺体は、データ通信装置200C’に嵌合される複数の突起を有する。データ通信装置200C’の筺体は、上記複数の突起をそれぞれ嵌合する複数の差し込み穴を有する。これにより、データ通信装置200C、200C’は互いに密着固定される。なお、アンテナ自体は筺体の内部にあるので、データ通信装置200C、200C’の各筺体互いに密着固定しても、アンテナ同士が接触することはなく、無線通信には支障はない。
データ通信装置200Cは、胸部用RFコイル装置100Cで検出されたMR信号を、第1の実施形態と同様の手法により、誘導電界を介してデータ通信装置200C’に無線送信する。即ち、胸部用RFコイル装置100Cのコイル素子106a、106bでそれぞれ検出されてA/D変換器140a、140bでA/D変換された各MR信号は、P/S変換器144でシリアル信号にされ、データ通信装置200C’に無線送信される。
データ通信装置200C’は、受信したシリアル信号を元のパラレル信号(各コイル素子106a、106bに対応する複数のデジタルのMR信号)に戻す。この後、データ通信装置200C’は、コイル素子106aで検出されたMR信号を記憶素子160αに入力し、コイル素子106bで検出されたMR信号を記憶素子160βに入力する。
腰部用RFコイル装置100γの記憶制御部152は、コイル素子106aで検出されて無線送信されたMR信号と、腰部用RFコイル装置100γのコイル素子106αで検出されてA/D変換器140αでデジタル化されたMR信号とを記憶素子160αに記憶させる。
また、腰部用RFコイル装置100γの記憶制御部152は、コイル素子106bで検出されて無線送信されたMR信号と、腰部用RFコイル装置100γのコイル素子106βで検出されてA/D変換器140βでデジタル化されたMR信号とを記憶素子160βに記憶させる。
同様に、腰部用RFコイル装置100γのコイル素子106α、106βで検出されてシリアル信号にされたMR信号は、誘導電界を介して、データ通信装置200C’からデータ通信装置200Cに無線送信される。データ通信装置200Cは、受信したシリアル信号を上記同様にパラレル信号に戻す。データ通信装置200Cは、コイル素子106αで検出されたMR信号を記憶素子160aに入力し、コイル素子106βで検出されたMR信号を記憶素子160bに入力する。
胸部用RFコイル装置100Cの記憶制御部152は、コイル素子106αで検出されて無線送信されたMR信号と、コイル素子106aで検出されてデジタル化されたMR信号とを記憶素子160aに記憶させる。
また、胸部用RFコイル装置100Cの記憶制御部152は、コイル素子106βで検出されて無線送信されたMR信号と、コイル素子106bで検出されてデジタル化されたMR信号とを記憶素子160bに記憶させる。
このように、胸部用RFコイル装置100C、腰部用RFコイル装置100γの各コイル素子106a、106b、106α、106βでそれぞれ検出されたMR信号は、胸部用RFコイル装置100C、腰部用RFコイル装置100γ内の各記憶素子160a、160b、160α、160βにより、二重にバックアップされる。これにより、MR信号のデータの保護を万全にすることができる。
複数の受信用のRFコイル装置が被検体に装着される場合、これらRFコイル装置を直列的に接続し、一方のRFコイル装置側のコイル側無線通信装置のみを制御側無線通信装置300に対して近接固定してもよい。
図16は、胸部用RFコイル装置100Dと、腰部用RFコイル装置100Δとを一の制御側無線通信装置300に対して直列的に接続した一例を示すブロック図である。
胸部用RFコイル装置100Dは、カバー部材104dと、コイル側無線通信装置200Aと、これらを接続する不図示のケーブルとを有する。
カバー部材104dは、ここでは一例として、誘導磁界で充電される充電池BAの代わりに、イメージング前に予め充電される充電池BATを有する点を除き、第1の実施形態のカバー部材104と同様の構成である。
充電池BATは、不図示の配線により、胸部用RFコイル装置100Dの各部に電力を供給する。
腰部用RFコイル装置100Δは、データ通信装置300Δと、カバー部材104Δと、不図示のケーブルとを有する。胸部用RFコイル装置100Dは、ケーブルにより、もう1つのコイル側無線通信装置200Aに接続されている。カバー部材104Δは、以下の2点を除き、図15で説明したカバー部材104γと同様の構成である。
第1に、カバー部材104Δ内の各記憶素子160α、160βは、胸部用RFコイル装置100Dで検出されたMR信号を記憶せず、コイル素子106α、106βで検出されてデジタル化されたMR信号をそれぞれ記憶する。
第2に、カバー部材104内には、以下の2つのシリアル信号を1つのシリアル信号に合成する信号合成部196が設けられている。
一方は、胸部用RFコイル装置100Dのコイル素子106a、106bで検出されてデジタル化され、シリアル信号としてコイル側無線通信装置200Aからデータ通信装置300Δに無線送信されたMR信号である。
他方は、腰部用RFコイル装置100Δのコイル素子106α、106βで検出されてそれぞれデジタル化され、P/S変換器144でシリアル信号にされたMR信号である。
即ち、信号合成部196は、4つのコイル素子106a、106b、106α、106βで検出されたMR信号が含まれるシリアル信号を、コイル側無線通信装置200Aに入力する。腰部用RFコイル装置100Δ側のコイル側無線通信装置200Aは、天板34上で制御側無線通信装置300に対して近接固定され、信号合成部196から入力されるシリアル信号を第1の実施形態と同様に制御側無線通信装置300に無線送信する。
データ通信装置300Δは、制御側無線通信装置300と同様にコイル側無線通信装置200Aを嵌合する形状であり、誘導電界結合型カプラなどの誘導電界を介した無線通信用の構成要素を有する。データ通信装置300Δは、誘導電界を介した無線通信により、胸部用RFコイル装置100D側のコイル側無線通信装置200Aから、コイル素子106a、106bで検出されたMR信号が含まれるシリアル信号を受信する。
このように、複数の受信用RFコイル装置を直列的に接続し、1のRFコイル装置側のコイル側無線通信装置のみを制御側無線通信装置300に近接固定する場合、使用される制御側無線通信装置300は1つのみとなる。この場合、RF受信器48の使用チャンネル数を減らすことができる。
なお、図15、図16で述べた複数の受信用RFコイル装置を並列的又は直列的に接続する変形例は、頭部用、肩用などの他の部位用のRFコイル装置の場合にも適用可能である。また、並列的又は直列的に接続する受信用RFコイル装置の数は、2つに限定されるものではなく、3つ以上でもよい。
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。