JP6440975B2 - 計測システムのためのロボット搭載モニュメントシステム - Google Patents
計測システムのためのロボット搭載モニュメントシステム Download PDFInfo
- Publication number
- JP6440975B2 JP6440975B2 JP2014132715A JP2014132715A JP6440975B2 JP 6440975 B2 JP6440975 B2 JP 6440975B2 JP 2014132715 A JP2014132715 A JP 2014132715A JP 2014132715 A JP2014132715 A JP 2014132715A JP 6440975 B2 JP6440975 B2 JP 6440975B2
- Authority
- JP
- Japan
- Prior art keywords
- measurement systems
- measurement
- coordinate system
- monument
- reference coordinate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0287—Control of position or course in two dimensions specially adapted to land vehicles involving a plurality of land vehicles, e.g. fleet or convoy travelling
- G05D1/0291—Fleet control
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Program-control systems
- G05B19/02—Program-control systems electric
- G05B19/418—Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS] or computer integrated manufacturing [CIM]
- G05B19/41815—Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS] or computer integrated manufacturing [CIM] characterised by the cooperation between machine tools, manipulators and conveyor or other workpiece supply system, workcell
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B21/00—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant
- G01B21/02—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring length, width, or thickness
- G01B21/04—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring length, width, or thickness by measuring coordinates of points
- G01B21/047—Accessories, e.g. for positioning, for tool-setting, for measuring probes
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/45—Nc applications
- G05B2219/45061—Measuring robot
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Remote Sensing (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Quality & Reliability (AREA)
- Manufacturing & Machinery (AREA)
- General Engineering & Computer Science (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Optics & Photonics (AREA)
- Electromagnetism (AREA)
Description
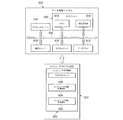
202 基部
204 モニュメント構造
206 移動システム208
208 センサシステム
210 コントロールユニット
212 モニュメント
214 モニュメント
216 軸
218 矢印(回転方向)
220 ホロノミックホイール
222 ホロノミックホイール
224 モータ
226 バッテリ
228 レーザスキャナ
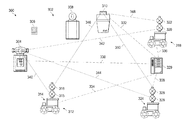
300 環境
302 測定システム
304 レーザ追跡308
306 モーションキャプチャシステム
308 レーザレーダシステム
310 位置追跡システム
312 モニュメントシステム
314 ロボット車両
315 モニュメント
316 モニュメント
318 ロボット車両
320 モニュメント
322 モニュメント
324 ロボット車両
326 モニュメント
328 モニュメント
330/332/334/336/338 無線通信リンク
Claims (7)
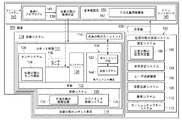
- 複数のロボット車両(118)であって、前記複数のロボット車両の各々が作業エリア(100)内のそれぞれの位置へと移動するよう構成されたロボット車両(118)と、
前記複数のロボット車両(118)に関連付けられた複数の基準点(116)と、
前記作業エリア(100)内における一又は複数の測定システム(102)であって、
前記一又は複数の測定システム(102)の各々が、前記複数の基準点(116)のうちの2以上の基準点に対して、前記一又は複数の測定システム(102)を基準座標系(150)に位置合わせするために使用する位置測定値(148)を生成するように構成された測定システム(102)と、
前記一又は複数の測定システム(102)を前記基準座標系(150)に位置合わせするために、前記一又は複数の測定システム(102)の各々により生成される前記位置測定値(148)を前記基準座標系(150)に変換するよう構成されたメインコントローラ(140)と、
を含むシステムであって、
前記複数のロボット車両の各々は、
基部(122)と、
前記基部(122)に着脱可能に関連付けられた構造(124)であって、前記複数の基準点のうちの一又は複数の基準点を支持かつ保持し、前記複数の基準点のうちの一又は複数の基準点の各々が、前記一又は複数の測定システム(102)のうちのそれぞれに対応するよう構成された前記構造(124)とを備え、
前記位置測定値(148)は、前記一又は複数の測定システム(102)により生成される、前記作業エリア(100)内の幾つかの対象物の測定値(103)が、前記基準座標系(150)に則して処理されることが可能になるように、前記一又は複数の測定システム(102)を前記基準座標系(150)に位置合わせするために使用可能である、
システム。 - 前記一又は複数の測定システム(102)は、光学測定システム(104)、レーザ追跡装置(106)、位置追跡システム(108)、撮像システム(110)、及びモーションキャプチャシステム(112)のうちの少なくとも1つを含む、請求項1に記載のシステム。
- 前記構造(124)は、
前記複数の基準点のうちの一又は複数の基準点の、前記基部(122)に対する配置又は配向のうちの少なくとも1つを行うよう構成された配置システム(144)と、
前記基部(122)に関連付けられて前記ロボット車両(120)を移動させるよう構成された移動システム(126)と、
前記基部(122)に関連付けられてセンサデータ(138)を生成するよう構成されたセンサシステム(128)と、
前記基部(122)に関連付けられて前記センサデータ(138)を受信するよう構成されたコントロールユニット(130)であって、前記センサデータ(138)を使用して前記移動システム(126)をコントロールする前記コントロールユニット(130)と
を含む、請求項1に記載のシステム。 - 複数のロボット車両の各々を作業エリア(100)内のそれぞれの位置へと移動させることであって、複数の基準点(116)が前記複数のロボット車両(118)に関連付けられ、前記複数のロボット車両の各々は、基部(122)と、前記基部(122)に着脱可能に関連付けられた構造(124)を備え、前記構造(124)は前記複数の基準点のうちの一又は複数の基準点を支持かつ保持し、前記複数の基準点のうちの一又は複数の基準点の各々が、一又は複数の測定システム(102)のうちのそれぞれに対応するよう構成される、移動させることと、
前記作業エリア(100)内における前記一又は複数の測定システム(102)の各々により、前記複数の基準点(116)のうちの2以上の基準点に対して、前記一又は複数の測定システム(102)を基準座標系(150)に位置合わせするために使用する位置測定値(148)を生成することであって、前記位置測定値(148)は、前記一又は複数の測定システム(102)により生成される、前記作業エリア(100)内の幾つかの対象物の測定値(103)が、前記基準座標系(150)に則して処理されることが可能になるように、前記一又は複数の測定システム(102)を前記基準座標系(150)に位置合わせするために使用可能である、生成することと、
メインコントローラ(140)により、前記一又は複数の測定システム(102)を前記基準座標系(150)に位置合わせするために、前記一又は複数の測定システム(102)の各々により生成される前記位置測定値(148)を前記基準座標系(150)に変換することと、を含む方法。 - 前記一又は複数の測定システム(102)を前記基準座標系(150)に位置合わせすることにより、前記一又は複数の測定システム(102)の各々により生成される、前記作業エリア(100)内の幾つかの対象物の測定値(103)が、前記基準座標系(150)に則して処理されることが可能となる、請求項4に記載の方法。
- 前記複数の基準点(116)のうちの一又は複数の基準点を、前記複数のロボット車両(118)のうちの1つのロボット車両上の1つの構造(124)に搭載することにより、前記複数の基準点(116)を前記複数のロボット車両(118)と関連付けること
を含む、請求項4または5に記載の方法。 - 前記一又は複数の測定システム(102)が前記作業エリア(100)内の幾つかの対象物の前記測定値(103)の生成を完了したとき、前記複数の基準点(116)を伴う前記複数のロボット車両(118)を前記作業エリア(100)外へと移動すること
をさらに含む、請求項4から6のいずれか一項に記載の方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/933,354 US10725478B2 (en) | 2013-07-02 | 2013-07-02 | Robotic-mounted monument system for metrology systems |
| US13/933,354 | 2013-07-02 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015014600A JP2015014600A (ja) | 2015-01-22 |
| JP2015014600A5 JP2015014600A5 (ja) | 2017-08-10 |
| JP6440975B2 true JP6440975B2 (ja) | 2018-12-19 |
Family
ID=51228275
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014132715A Active JP6440975B2 (ja) | 2013-07-02 | 2014-06-27 | 計測システムのためのロボット搭載モニュメントシステム |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US10725478B2 (ja) |
| EP (1) | EP2821877B1 (ja) |
| JP (1) | JP6440975B2 (ja) |
| KR (1) | KR102224047B1 (ja) |
| CN (2) | CN110780672B (ja) |
| CA (1) | CA2852519C (ja) |
| ES (1) | ES2700282T3 (ja) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10725478B2 (en) * | 2013-07-02 | 2020-07-28 | The Boeing Company | Robotic-mounted monument system for metrology systems |
| EP3158410B1 (en) * | 2014-06-19 | 2021-01-27 | Husqvarna AB | Automatic beacon position determination |
| US9575183B2 (en) * | 2015-03-31 | 2017-02-21 | The Boeing Company | Tracking measurement system and method |
| CN105180803B (zh) * | 2015-07-13 | 2018-06-26 | 渤海船舶重工有限责任公司 | 核电反应堆冷却剂回路波动管测量方法 |
| CN105136036B (zh) * | 2015-09-24 | 2018-07-31 | 中国科学院上海高等研究院 | 便携式图像与激光融合的三维扫描系统 |
| US20190122389A1 (en) * | 2016-05-30 | 2019-04-25 | Sony Corporation | Information processing apparatus, information processing method, program, and imaging system |
| US11536572B2 (en) * | 2016-11-09 | 2022-12-27 | The Texas A&M University System | Method and system for accurate long term simultaneous localization and mapping with absolute orientation sensing |
| WO2020050494A1 (en) | 2018-09-06 | 2020-03-12 | Lg Electronics Inc. | A robot cleaner and a controlling method for the same |
| US11432697B2 (en) | 2018-09-06 | 2022-09-06 | Lg Electronics Inc. | Robot cleaner and a controlling method for the same |
| KR102252033B1 (ko) * | 2018-09-06 | 2021-05-14 | 엘지전자 주식회사 | 이동 로봇 및 그 제어방법 |
| CN109932706B (zh) * | 2019-04-19 | 2022-11-29 | 青岛中科慧畅信息科技有限公司 | 一种无人装卸物流装备系统激光雷达标定系统及标定方法 |
| JP7395280B2 (ja) * | 2019-08-08 | 2023-12-11 | 三菱重工業株式会社 | 位置演算システム、位置演算方法および無人搬送車 |
| US10782267B1 (en) | 2019-11-04 | 2020-09-22 | Equate Petrochemical Company | Mobile non-destructive testing inspection system |
| CN116113899A (zh) * | 2020-06-16 | 2023-05-12 | 抵达有限公司 | 用于车辆的机器人生产环境 |
| CN114923467B (zh) * | 2022-04-07 | 2023-10-20 | 清华大学 | 激光跟踪仪和igps的空间测量可达性仿真分析与布置方法 |
| CN119388126B (zh) * | 2024-10-31 | 2025-12-05 | 天津航天机电设备研究所 | 一种航天器展开臂的高精度装配方法及装置 |
Family Cites Families (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04227507A (ja) * | 1990-07-02 | 1992-08-17 | Nec Corp | 移動ロボット用のマップを作成し保持する方法 |
| CA2177852A1 (en) * | 1993-12-07 | 1995-06-15 | Osamu Murayama | Apparatus for determining position of moving body |
| WO1996007959A1 (de) * | 1994-09-06 | 1996-03-14 | Siemens Aktiengesellschaft | Verfahren zur bestimmung der position einer landmarke in der umgebungskarte einer selbstbeweglichen einheit, deren abstand zur einheit dynamisch von dieser ermittelt wird |
| US6101455A (en) * | 1998-05-14 | 2000-08-08 | Davis; Michael S. | Automatic calibration of cameras and structured light sources |
| US6873880B2 (en) * | 2001-12-26 | 2005-03-29 | Lockheed Martin Corporation | Machine for performing machining operations on a workpiece and method of controlling same |
| US6898484B2 (en) * | 2002-05-01 | 2005-05-24 | Dorothy Lemelson | Robotic manufacturing and assembly with relative radio positioning using radio based location determination |
| CA2412815A1 (fr) * | 2002-11-27 | 2004-05-27 | Martin Deschambault | Plate-forme robotique mobile et modulaire offrant plusieurs modes de locomotion pour effectuer des mouvements evolues en trois dimensions |
| KR100565227B1 (ko) * | 2003-12-22 | 2006-03-30 | 엘지전자 주식회사 | 이동로봇의 위치인식장치 및 방법 |
| KR20050063543A (ko) * | 2003-12-22 | 2005-06-28 | 엘지전자 주식회사 | 이동로봇의 위치확인장치 및 방법 |
| JP4472432B2 (ja) | 2004-06-09 | 2010-06-02 | パルステック工業株式会社 | 座標変換係数取得方法、座標変換係数取得装置およびコンピュータプログラム |
| KR100803203B1 (ko) * | 2005-02-04 | 2008-02-14 | 삼성전자주식회사 | 이동체의 위치 정보 보정 장치 및 방법과 그 장치를제어하는 컴퓨터 프로그램을 저장하는 컴퓨터로 읽을 수있는 기록 매체 |
| US20060271332A1 (en) * | 2005-05-18 | 2006-11-30 | Perceptron, Inc. | Method for calibrating a non-contact sensor using a robot |
| EP1780672A1 (en) * | 2005-10-25 | 2007-05-02 | Bracco Imaging, S.P.A. | Method of registering images, algorithm for carrying out the method of registering images, a program for registering images using the said algorithm and a method of treating biomedical images to reduce imaging artefacts caused by object movement |
| US7368207B2 (en) * | 2006-03-31 | 2008-05-06 | Eastman Kodak Company | Dynamic compensation system for maskless lithography |
| AU2007254160B2 (en) * | 2006-05-19 | 2013-06-20 | Mako Surgical Corp. | Method and apparatus for controlling a haptic device |
| US7643893B2 (en) * | 2006-07-24 | 2010-01-05 | The Boeing Company | Closed-loop feedback control using motion capture systems |
| US7813888B2 (en) * | 2006-07-24 | 2010-10-12 | The Boeing Company | Autonomous vehicle rapid development testbed systems and methods |
| US9858712B2 (en) | 2007-04-09 | 2018-01-02 | Sam Stathis | System and method capable of navigating and/or mapping any multi-dimensional space |
| US7739034B2 (en) * | 2007-04-17 | 2010-06-15 | Itt Manufacturing Enterprises, Inc. | Landmark navigation for vehicles using blinking optical beacons |
| CN100573387C (zh) * | 2007-12-10 | 2009-12-23 | 华中科技大学 | 机器人自主定位系统 |
| EP3272395B1 (en) * | 2007-12-23 | 2019-07-17 | Carl Zeiss Meditec, Inc. | Devices for detecting, controlling, and predicting radiation delivery |
| US8838273B2 (en) * | 2008-12-10 | 2014-09-16 | Southwest Research Institute | System for autonomously dispensing media on large scale surfaces |
| WO2010132791A1 (en) | 2009-05-15 | 2010-11-18 | Purdue Research Foundation | Calibration of large camera networks |
| WO2011013862A1 (ko) * | 2009-07-28 | 2011-02-03 | 주식회사 유진로봇 | 이동 로봇의 위치 인식 및 주행 제어 방법과 이를 이용한 이동 로봇 |
| US8473101B2 (en) * | 2009-08-21 | 2013-06-25 | Harris Corporation | Coordinated action robotic system and related methods |
| US11699247B2 (en) | 2009-12-24 | 2023-07-11 | Cognex Corporation | System and method for runtime determination of camera miscalibration |
| DE102010013391A1 (de) * | 2010-03-30 | 2011-10-06 | Eisenmann Ag | Verfahren zum Betreiben einer mit mindestens einem Roboter bestückten Behandlungskabine |
| US9393694B2 (en) * | 2010-05-14 | 2016-07-19 | Cognex Corporation | System and method for robust calibration between a machine vision system and a robot |
| US9149929B2 (en) * | 2010-05-26 | 2015-10-06 | The Boeing Company | Methods and systems for inspection sensor placement |
| US8982207B2 (en) * | 2010-10-04 | 2015-03-17 | The Boeing Company | Automated visual inspection system |
| US8977391B2 (en) * | 2011-07-15 | 2015-03-10 | The Boeing Company | Spacecraft development testbed system |
| ITTO20110645A1 (it) * | 2011-07-18 | 2013-01-19 | Thales Alenia Space Italia S P A C On Unico Socio | Sistemi di localizzazione, navigazione, esplorazione e monitoraggio per ambienti sconosciuti e/o difficili |
| TW201305761A (zh) * | 2011-07-21 | 2013-02-01 | Ememe Robot Co Ltd | 自走機器人及其定位方法 |
| US8870116B2 (en) * | 2011-09-27 | 2014-10-28 | The Boeing Company | Aircraft seating systems |
| DE102011084412A1 (de) * | 2011-10-13 | 2013-04-18 | Kuka Roboter Gmbh | Robotersteuerungsverfahren |
| DE102012208094A1 (de) * | 2012-05-15 | 2013-11-21 | Kuka Laboratories Gmbh | Verfahren zum Ermitteln möglicher Positionen eines Roboterarms |
| US10725478B2 (en) * | 2013-07-02 | 2020-07-28 | The Boeing Company | Robotic-mounted monument system for metrology systems |
-
2013
- 2013-07-02 US US13/933,354 patent/US10725478B2/en active Active
-
2014
- 2014-05-22 CA CA2852519A patent/CA2852519C/en active Active
- 2014-06-16 KR KR1020140072645A patent/KR102224047B1/ko active Active
- 2014-06-27 JP JP2014132715A patent/JP6440975B2/ja active Active
- 2014-06-30 CN CN201911064230.3A patent/CN110780672B/zh active Active
- 2014-06-30 CN CN201410305122.1A patent/CN104281118B/zh active Active
- 2014-07-01 EP EP14175316.0A patent/EP2821877B1/en active Active
- 2014-07-01 ES ES14175316T patent/ES2700282T3/es active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP2821877A2 (en) | 2015-01-07 |
| US10725478B2 (en) | 2020-07-28 |
| CA2852519C (en) | 2018-09-11 |
| KR102224047B1 (ko) | 2021-03-10 |
| KR20150004263A (ko) | 2015-01-12 |
| EP2821877A3 (en) | 2016-06-08 |
| CN104281118B (zh) | 2019-11-29 |
| EP2821877B1 (en) | 2018-09-05 |
| ES2700282T3 (es) | 2019-02-14 |
| CA2852519A1 (en) | 2015-01-02 |
| JP2015014600A (ja) | 2015-01-22 |
| CN104281118A (zh) | 2015-01-14 |
| CN110780672B (zh) | 2023-08-15 |
| US20150012162A1 (en) | 2015-01-08 |
| CN110780672A (zh) | 2020-02-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6440975B2 (ja) | 計測システムのためのロボット搭載モニュメントシステム | |
| US10501209B2 (en) | Metrology system for positioning assemblies | |
| JP6018425B2 (ja) | 製造制御システム | |
| US10896546B2 (en) | Augmented reality system with an active portable anchor | |
| EP3187312B1 (en) | Self-locating robots | |
| KR102629483B1 (ko) | 조정된 복합 테이프 적층 | |
| EP3594784B1 (en) | Augmented reality system with an active portable anchor | |
| US9484148B1 (en) | Power system for ground-based machines |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170627 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170627 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180416 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180424 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180719 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181023 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181121 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6440975 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |