JP6439582B2 - Handy mobile printer and its program - Google Patents
Handy mobile printer and its program Download PDFInfo
- Publication number
- JP6439582B2 JP6439582B2 JP2015105361A JP2015105361A JP6439582B2 JP 6439582 B2 JP6439582 B2 JP 6439582B2 JP 2015105361 A JP2015105361 A JP 2015105361A JP 2015105361 A JP2015105361 A JP 2015105361A JP 6439582 B2 JP6439582 B2 JP 6439582B2
- Authority
- JP
- Japan
- Prior art keywords
- mobile printer
- sensor
- handy mobile
- acceleration
- plane
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J3/00—Typewriters or selective printing or marking mechanisms characterised by the purpose for which they are constructed
- B41J3/36—Typewriters or selective printing or marking mechanisms characterised by the purpose for which they are constructed for portability, i.e. hand-held printers or laptop printers
Landscapes
- Printers Characterized By Their Purpose (AREA)
- Ink Jet (AREA)
Description
この発明は、ノズルを有するインクジェットヘッドを備え、人の手で紙面上を操作されながら画データに応じてノズルからインクを吐出して印刷するハンディモバイルプリンタと、それを制御するコンピュータのプログラムに関する。 The present invention relates to a handy mobile printer that includes an ink jet head having nozzles and discharges ink from nozzles according to image data while being operated on a paper surface by a human hand, and a computer program that controls the handy mobile printer.
プリンタは周知の印刷用機器であり、インクジェットプリンタ、レーザプリンタ、サーマルプリンタ、ドットインパクトプリンタ等、書き込み方式が異なる種々のプリンタがある。この発明は、そのうちのインクジェットプリンタに関する。
インクジェットプリンタは、印刷媒体である紙にインクを塗布することによって、文字や絵等の所望の画像を形成する機器である。そのインクの塗布は一般に、一定方向(主走査方向)に精確に設置されたガイドレール上に組み付けた、プリントヘッドによってなされる。
The printer is a well-known printing device, and there are various printers with different writing methods such as an ink jet printer, a laser printer, a thermal printer, and a dot impact printer. The present invention relates to an inkjet printer among them.
An inkjet printer is a device that forms a desired image such as a character or a picture by applying ink to paper as a printing medium. In general, the ink is applied by a print head assembled on a guide rail accurately installed in a certain direction (main scanning direction).
すなわち、ガイドレールと垂直方向(副走査方向)に印刷媒体である紙を搬送させる搬送システムにより、プリントヘッドの垂直下に紙の印刷位置を移動させ、紙が静止している間に、プリントヘッドをガイドレールに沿って往復動作させる。この動作中にタイミングを合わせてインクを吐出し、紙上にインクを塗布していく。
プリントヘッドの往復運動によるインクの塗布が完了したら、紙を副走査方向に所定量だけ搬送させてその位置を保持し(静止し)、プリントヘッドを往復運動させながらインクの塗布を行う。この動作の繰り返しにより、所望の画像を形成していく。
That is, the print head is moved vertically below the print head by a transport system that transports the paper that is the print medium in the direction perpendicular to the guide rail (sub-scanning direction). Is reciprocated along the guide rail. During this operation, ink is ejected at the same timing, and ink is applied onto the paper.
When the ink application by the reciprocating motion of the print head is completed, the paper is transported by a predetermined amount in the sub-scanning direction, the position is held (still), and the ink is applied while the print head is reciprocating. By repeating this operation, a desired image is formed.
昨今、ノート型パーソナルコンピュータ(PC)の小型化や、スマートデバイスの急激な普及により、プリンタにおいても、小型化及び携帯化が大きな要望の一つとなっている。
すでに携帯型のプリンタとして、持ち運び可能な大きさまで小型化した「モバイルプリンタ」が商品化されている。そのプリンタの形態は、卓上シリアルプリンタのような通常の一般的なプリンタの機能を有しながら、ビジネスバッグに入る程度の大きさである。
しかし、上述したように、プリントヘッドを固定するガイドレールや、紙搬送システムが必要であり、所定の定型紙を通紙させる必要があるため、その小型化には限度があった。
Recently, due to the downsizing of notebook personal computers (PCs) and the rapid spread of smart devices, downsizing and portability of printers have become one of the great demands.
As a portable printer, a “mobile printer” that has been downsized to a portable size has already been commercialized. The form of the printer is large enough to fit into a business bag while having the functions of a normal general printer such as a desktop serial printer.
However, as described above, a guide rail for fixing the print head and a paper transport system are required, and it is necessary to pass a predetermined standard paper.
そこで、さらなる小型化と携帯化の要望を受け、紙搬送システムをなくした機構で、紙面上を人の手でプリンタを走査しながらインクを塗布する、「ハンディモバイルプリンタ」が開発されている。
そのハンディモバイルプリンタは、既に幾つか製品化されており、例えば以下のようなものが挙げられる。
Therefore, in response to the demand for further miniaturization and portability, a “handy mobile printer” has been developed that applies ink while scanning the printer with the hand of a person with a mechanism that eliminates the paper transport system.
Several handy mobile printers have already been commercialized, and examples include the following.
・一方向(例えばX軸方向)の位置検知機能を搭載し、一方向にのみ走査させて印字(印刷又は画像形成と同意)するプリンタ
・二方向(例えばX/Y軸方向)の位置検知機能を搭載し、二方向にのみ走査させて印字するプリンタ
・三方向(例えばX/Y/R軸,R:回転)の位置検知機能を搭載し、平面上を自由に走査させて印字するプリンタ(但し、現状発売されている製品はない)
-Printer equipped with a position detection function in one direction (for example, the X-axis direction) and scanning only in one direction for printing (consent with printing or image formation)-Position detection function in two directions (for example, the X / Y axis direction) A printer that scans and prints only in two directions ・ A printer that has a position detection function in three directions (for example, X / Y / R axis, R: rotation) and can scan and print freely on a plane ( (However, there is no product currently on sale)
これらはいずれにしろ、ハンディモバイルプリンタ自身の位置を正確に検知できることが、プリントヘッドよりも大きい画像を印字する際や、高画質の印字をする際に課題となる。
平面上を自由に走査させて印字するプリンタは、紙に対するプリンタ自身の平面上の三方向(X/Y/R軸)の位置を相対的に検知する必要がある。その方法としては、例えば、PCのポインティングデバイス等で使用されているような光学センサを複数設置することによって、位置を検知する方法が知られている。
In any case, being able to accurately detect the position of the handy mobile printer itself is a problem when printing an image larger than the print head or when printing with high image quality.
A printer that freely scans and prints on a plane needs to relatively detect positions in three directions (X / Y / R axes) on the plane of the printer itself with respect to paper. As such a method, for example, a method of detecting a position by installing a plurality of optical sensors such as those used in a PC pointing device is known.
PCのポインティングデバイスで使用されている光学センサの位置検知機能は、数mm四方の画像を1秒間に数千回取得(サンプリング)する。そして、その一回一回の画像(フレーム)がどのくらい差があるかを画像比較することによって、相対的な2方向の移動度合い(ΔX,ΔY)を出力する。
このような光学センサを物理的に固定して複数個設置すれば、各光学センサが検知した移動度合いから、三角関数を用いて、プリンタ自身の平面上の三方向(X/Y/R値)の位置を算出できる。
The position detection function of an optical sensor used in a PC pointing device acquires (samples) several mm square images several thousand times per second. Then, the relative degree of movement (ΔX, ΔY) in two directions is output by comparing the difference in the images (frames) at a time.
If a plurality of such optical sensors are physically fixed, a trigonometric function is used to determine three directions (X / Y / R values) on the plane of the printer itself from the degree of movement detected by each optical sensor. Can be calculated.
その結果、サンプリングタイミング毎の移動距離が分かるため、プリンタ自身が原点(0,0)(=印字開始位置)に対して、今どの位置(X,Y座標位置)に居るのかを認識することが可能になる。その認識できる座標はセンサの出力値の解像度による。
一方向又は二方向の位置検知に関しては、三方向の位置検知プロセスの中の値を使用すればよい。
As a result, since the movement distance for each sampling timing is known, the printer itself can recognize which position (X, Y coordinate position) is at the origin (0, 0) (= print start position). It becomes possible. The recognizable coordinates depend on the resolution of the sensor output value.
For one-way or two-way position sensing, values in a three-way position sensing process may be used.
例えば、特許文献1には、フリーハンドで走査するハンディモバイルプリンタの位置制御を実現するために、複数のナビゲーションセンサ(光学撮像センサ)を用いた相対位置検知方法によって、プリンタ自身の位置を検知する仕組みが開示されている。
For example, in
しかし、このような従来のハンディモバイルプリンタにおける位置検知方法では、プリンタを誤って紙面上からZ方向に持ち上げた場合に、原点(0,0)に対するX,Y方向の相対的な位置の検知ができなくなり、実際の位置を見失ってしまう。そのため、次のような問題があった。
プリンタを持ち上げた後紙面上に戻した際に、紙面上のプリンタ自身の位置が分からなくなってしまい、印字中の画像の印字を再開できず、その印刷が無駄になってしまう。
したがって、少しでもプリンタを紙面上から離してしまったら、印刷が失敗になるという制約があるため、ユーザビリティが悪かった。
However, in such a position detection method in the conventional handy mobile printer, when the printer is erroneously lifted from the paper surface in the Z direction, the relative position in the X and Y directions with respect to the origin (0, 0) is detected. It becomes impossible to lose sight of the actual position. Therefore, there were the following problems.
When the printer is lifted and returned to the paper surface, the position of the printer itself on the paper surface becomes unclear, and printing of the image being printed cannot be resumed, and the printing becomes useless.
Therefore, usability is poor because there is a restriction that printing will fail if the printer is moved away from the paper.
この発明は上記の問題を解決するためになされたものであり、ハンディモバイルプリンタの位置が持ち上がったり傾いた場合でも、一定の高さ又は傾きまでであれば、そのまま印刷を続けられるようにして、正常な印刷を完遂できるようにすることを目的とする。 The present invention has been made to solve the above-described problem. Even when the position of the handy mobile printer is lifted or tilted, if it reaches a certain height or tilt, printing can be continued as it is. The purpose is to enable normal printing to be completed.
この発明は上記の目的を達成するため、ノズルを有するインクジェットヘッドを備え、人の手で紙面上を走査されながら画データに応じてまえ上記ノズルからインクを吐出して印刷するハンディモバイルプリンタであって、紙面に沿った平面上の相対的な位置を検知する座標検知センサと、少なくとも上記平面に対して垂直な方向の加速度を検知する加速度センサと、上記平面に対する傾きの角速度を検知するジャイロセンサと、上記座標検知センサによって検知される位置情報から上記ノズルの位置座標を算出する位置算出手段と、上記加速度センサによって検知される加速度情報から上記平面に対して垂直な方向への移動距離を算出する距離算出手段と、上記ジャイロセンサによって検知される角速度情報から上記平面に対する傾き角度を算出する角度算出手段と、上記位置算出手段によって算出された上記ノズルの位置座標を、上記距離算出手段によって算出された移動距離と上記角度算出手段によって算出された傾き角度とによって補正する位置座標補正手段と、その位置座標補正手段によって補正された上記ノズルの位置座標が上記画データと一致したときに、上記ノズルからインクを吐出させるように上記インクジェットヘッドを制御するヘッド駆動制御手段とを設けたことを特徴とする。 In order to achieve the above object, the present invention is a handy mobile printer that includes an ink jet head having nozzles and prints by ejecting ink from the nozzles according to image data while being scanned on a paper surface by a human hand. A coordinate detection sensor that detects a relative position on a plane along the plane of the paper, an acceleration sensor that detects at least an acceleration in a direction perpendicular to the plane, and a gyro sensor that detects an angular velocity of an inclination with respect to the plane. And position calculating means for calculating the position coordinates of the nozzle from position information detected by the coordinate detection sensor, and calculating a movement distance in a direction perpendicular to the plane from the acceleration information detected by the acceleration sensor. And an inclination angle with respect to the plane from the angular velocity information detected by the gyro sensor. A position coordinate correction that corrects the position coordinates of the nozzle calculated by the angle calculation means and the position calculation means by the movement distance calculated by the distance calculation means and the inclination angle calculated by the angle calculation means. And a head drive control means for controlling the inkjet head so that ink is ejected from the nozzle when the position coordinate of the nozzle corrected by the position coordinate correction means coincides with the image data. It is characterized by that.
この発明によるハンディモバイルプリンタは、その位置が持ち上がったり傾いた場合でも、一定の高さ又は傾きまでであれば、そのまま印字を続けることができ、印刷が無駄にならず、スムーズに正常な印刷を完遂することができる。 Even if the handy mobile printer according to the present invention is lifted or tilted, it can continue printing as long as it is up to a certain height or tilt, so that printing is not wasted and normal printing can be performed smoothly. Can be completed.
以下、この発明を実施するための形態を図面に基づいて具体的に説明するが、それに先立って、この発明の基礎となる従来のハンディモバイル・インクジェットプリンタ(以下「ハンディモバイルプリンタ」と称する)について、図12〜図15によって説明する。
図12は、従来のハンディモバイルプリンタの基本構成を示す模式的な底面図である。
このハンディモバイルプリンタ100は、記録媒体(一般に紙)と接する側の面となる底面1aに、インクを吐出するインクジェットヘッド2と、紙面に沿った平面上の相対的な位置を検知するためのセンサである複数の座標検知センサ3a,3bを有している。この例では、インクジェットヘッド2の幅を2分する中心線上でインクジェットヘッド2の長手方向の両側に、一対の座標検知センサ3a,3bを配置している。
DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENTS Hereinafter, embodiments for carrying out the present invention will be described in detail with reference to the drawings. Prior to that, a conventional handy mobile inkjet printer (hereinafter referred to as “handy mobile printer”) serving as the basis of the present invention will be described. This will be described with reference to FIGS.
FIG. 12 is a schematic bottom view showing a basic configuration of a conventional handy mobile printer.
The handy
インクジェットヘッド2は、図13にその模式的底面図を示すように、長方形の底面2aに、その幅方向と長手方向に沿って、複数列のインク吐出用ノズル6が配列されている。
座標検知センサ3a,3bは、例えば、ポインティングデバイス等で使用される光学センサであり、インクジェットヘッド2の平面上の傾きを検知するために、複数個配置している。
図12には、開始位置を原点O(X:0,Y:0)とする座標軸X,Yを実線で示し、それが回転角度θだけ回転した後の座標軸X′,Y′を破線で示している。
As shown in a schematic bottom view of FIG. 13, the
The coordinate
In FIG. 12, the coordinate axes X and Y having the start position as the origin O (X: 0, Y: 0) are indicated by solid lines, and the coordinate axes X ′ and Y ′ after being rotated by the rotation angle θ are indicated by broken lines. ing.
複数の座標検知センサ3a,3bから出力される「移動度合い(ΔX,ΔY)」から三角関数を用いて回転角度θを算出することができる。それらの情報と、インクジェットヘッド2と座標検知センサ3a,3bとの組み付け距離a〜dとにより、インクジェットヘッド2及びその各ノズル6が、開始位置(原点O)に対して今どこに居るのかを示す位置情報を認識する。それは、座標検知センサ3a,3bのサンプリングタイミング毎に、逐次認識することが可能になる。認識できる座標の精度は座標検知センサ3a,3bの出力値の解像度に依存する。
The rotation angle θ can be calculated using a trigonometric function from the “movement degrees (ΔX, ΔY)” output from the plurality of coordinate
図14は、このハンディモバイルプリンタを動作させる制御部の構成を示すブロック図である。
プリント回路基板(PCB)に搭載された制御部110には、CPU11、ホストI/F12、RAM13、ROM14、ヘッド駆動回路15、及び位置算出回路16を有している。それらはいずれも、システムバスを介してCPU11等とデータ及び信号のやり取りが可能に接続されている。
CPU11は各種の演算処理及び制御を司る。ホストI/F12は、パーソナルコンピュータ又はスマートデバイス(「PC/スマデバ」と略称する)8間の制御及び画像や操作コマンドの入力インタフェース(IF)である。
FIG. 14 is a block diagram showing a configuration of a control unit for operating the handy mobile printer.
The control unit 110 mounted on the printed circuit board (PCB) includes a
The
RAM13は、CPU11が演算及び画像処理等を実行する際に使用するワーキングメモリ、および一時的なデータを記憶するランダムアクセスメモリである。
ROM14は、プリンタのハードウェア制御を行うプログラムであるファームウェアやインクジェットヘッド2の駆動波形データ等の固定データを格納するリードオンリメモリである。
The
The
ヘッド駆動回路15は、インクジェットヘッド2を駆動させるためのデータ処理を行ない、駆動波形を生成するための回路である。位置算出回路16は、座標検知センサ3a,3bの情報を元に、インクジェットヘッド2の位置情報を算出するための回路であり、CPU11が兼ねてもよい。
また、このハンディモバイルプリンタ100には、印字の開始タイミングをユーザが決定するトリガとなるボタンである印字開始ボタン7と、動作状態表示するためのLED9も備えている。
The
The handy
図15は、このハンディモバイルプリンタによる印刷動作の流れを示すフローチャートである。このフローチャートの説明における「印字」は、「印刷」又は「画像形成」と同意である。
ハンディモバイルプリンタ100の電源をONにすると、図14に示した制御部110に電源が供給され、CPU11がROM14に格納されているプログラムを実行して、図15に示す処理を開始する。
まず、CPU11がステップS1で初期化を行なって、RAM13等の各デバイスを立ち上げる。
FIG. 15 is a flowchart showing a flow of printing operation by the handy mobile printer. “Print” in the description of this flowchart is the same as “print” or “image formation”.
When the handy
First, the
そして、ユーザがホスト機器であるPC/スマデバ8より、印刷したい画データ(印刷データ)をハンディモバイルプリンタ100に送信すると、ステップS2でその画データを受信する。その画データは、原点を起点とした印字画像である。
CPU11はステップS3で、受信した画データに座標の付加情報を追加して記憶する。これは、フリーハンドで印字する際に、画データの座標が必要になるからである。
When the user transmits image data (print data) to be printed from the PC /
In step S3, the
プリンタが画データを受信し、その画データの座標化を完了したタイミングをユーザに報知するため、CPU11は、ステップS4でプリンタ上のLED9を点滅させる。
それによってユーザは、印字したい領域の開始位置にハンディモバイルプリンタ100を移動して、紙とプリンタの角度を合わせ、初期位置を決定する(U1)。そして、印字開始ボタン7を押下する(U2)。
In order to notify the user of the timing at which the printer has received the image data and the image data has been coordinated, the
Accordingly, the user moves the handy
一方、制御部110のCPU11は、ステップS5で印字開始ボタン7が押下されるのを待ち、印字開始ボタン7が押下されると印字動作を開始する。
CPU11は、ステップS6で印字開始ボタン7が押下された初期位置情報を取得し、それを原点として位置算出回路16に各ノズル6の座標を算出させ、RAM13に記憶する。各ノズル6の座標は、座標検知センサ3a,3bの位置に対するインクジェットヘッド2の組み付け位置、インクジェットヘッド2内の各ノズル6の位置及び間隔によって決まり、その情報は予めROM14に記憶しているので、知ることができる。例えば、図13に示すインクジェットヘッド2内の左上のノズル6の座標を(0,0)とする。
On the other hand, the
The
フリーハンド走査で印字する際、プリンタは次にどの方向に走査されるか分からない。よって、次の印字データが確定できないため、ヘッド駆動回路15は、予めあらゆる方向の移動を考慮して印字データを持っておく必要がある。そのため、CPU11は次のステップS7で、RAM13から印字開始位置周辺(プリンタ周辺)の画データをヘッド駆動回路15内に内蔵されたメモリ(例えばSRAM)に転送しておく。
When printing with freehand scanning, the printer does not know which direction to scan next. Therefore, since the next print data cannot be determined, the
ユーザは、フリーハンドで平面上のあらゆる方向にプリンタを走査させることができる(U3)。そのため、プリンタが移動されると、CPU11はステップS8で、座標検知センサ3a,3bからその位置情報を取得し、位置算出回路16を用いて各ノズルの座標を算出し、RAM13に記憶している位置情報を更新する。そして、ステップS9でノズルの座標が画データと一致したか否かを判断する。ノズルの座標が画データと一致した時、CPU11はステップS10で、ヘッド駆動回路15にインクジェットヘッド2へ画データを転送させ、対象のノズル6からインクを吐出させて印字を行う。
The user can scan the printer in any direction on the plane freehand (U3). Therefore, when the printer is moved, the
その後、CPU11はステップS11で印字終了か否かを判断し、印字終了でなければステップS8へ戻って、位置情報の取得及び更新を行なって、上述したステップS11までの処理を繰り返す。
各ノズルの座標は、座標検知センサ3a,3bのサンプリング周期により更新されるため、印字する/しないの判断はこのサンプリング周期に依存する。
この位置情報更新を、CPU11の代わりに、ハード回路(例えばASICやFPGA)によって行なうようにしてもよい。
印字が完了したら、CPU11の処理はステップS11からステップS12へ進んで、例えばLED9を点灯させて、その旨をユーザに報知して印字動作を終了する。
Thereafter, the
Since the coordinates of each nozzle are updated according to the sampling period of the coordinate
This location information update may be performed by a hardware circuit (for example, ASIC or FPGA) instead of the
When the printing is completed, the process of the
しかし、このような従来のハンディモバイルプリンタでは、プリンタを持ち上げた場合には、インクジェットヘッドの各ノズルの座標を見失ってしまい、印字を再開することができない。仮に印字を再開したとしても、位置情報が実際の位置と異なってしまうため、画像が重なったり、空白ができてしまったりして異常画像となるので、別の用紙に印刷をやり直すことが必要になり、用紙が無駄になってしまう。
したがって、少しでもプリンタを持ち上げたら印刷が失敗してしまうという制約があり、ユーザへのユーザビリティが悪いという問題があった。
However, in such a conventional handy mobile printer, when the printer is lifted, the coordinates of each nozzle of the inkjet head are lost, and printing cannot be resumed. Even if printing is resumed, the position information will be different from the actual position, so the images will overlap or blank, resulting in an abnormal image, so it will be necessary to reprint on another sheet of paper As a result, the paper is wasted.
Therefore, there is a restriction that if the printer is lifted even a little, printing fails, and there is a problem that usability to the user is poor.
この発明は、ハンディモバイルプリンタにおけるこのような問題を解決するためになされたものであり、次のような特徴を有する。
要するに、ハンディモバイルプリンタに加速度センサ及びジャイロセンサを設けることによって、想定外の走査(持ち上げ走査)時にもプリンタ自身の位置を見失わず、その高さ及び傾きに応じたノズル座標情報を逐次算出する。それによって、印字画像とノズル座標の座標比較を行えるので、正常な印刷の継続及び再開が可能になり、正常な印刷を完遂することができる。
The present invention has been made in order to solve such problems in the handy mobile printer, and has the following features.
In short, by providing the handy mobile printer with an acceleration sensor and a gyro sensor, the position of the printer itself is not lost even during unexpected scanning (lifting scanning), and nozzle coordinate information corresponding to the height and inclination is sequentially calculated. Thereby, since the coordinate comparison between the print image and the nozzle coordinates can be performed, normal printing can be continued and resumed, and normal printing can be completed.
この発明の対象とするハンディモバイルプリンタは、人が手で持って紙面上を走査しながら印刷することができる、紙送り機構のない小型のインクジェットプリンタである。
その「プリンタ」は「印刷装置」、「印字装置」、「記録装置」、「画像形成装置」等とも称されるが、それらのいずれをも含むものである。
The handy mobile printer that is the object of the present invention is a small-sized inkjet printer that does not have a paper feed mechanism and can be printed while being scanned by a human hand.
The “printer” is also referred to as “printing apparatus”, “printing apparatus”, “recording apparatus”, “image forming apparatus”, and the like, and includes any of them.
以下、この発明の実施形態について図面を用いて具体的に説明する。
〔第1の実施形態〕
図1は、この発明によるハンディモバイルプリンタの第1の実施形態の基本構成を示す模式的な底面図である。この図1において、図12と同じ部分には同一の符号を付しており、それらの説明は省略する。
この図1に示す第1の実施形態のハンディモバイルプリンタ1は、図12に示した従来のハンディモバイルプリンタ100の構成に加えて、底面1aの幅方向の一方の側における2つの隅部に、加速度センサ4とジャイロセンサ5を設けている。
Hereinafter, embodiments of the present invention will be specifically described with reference to the drawings.
[First Embodiment]
FIG. 1 is a schematic bottom view showing a basic configuration of a first embodiment of a handy mobile printer according to the present invention. In FIG. 1, the same parts as those in FIG. 12 are denoted by the same reference numerals, and description thereof is omitted.
The handy
加速度センサ4は周知のセンサであり、速度の時間微分である加速度を検出するセンサであって、物体に働く加速度そのものの値を測定することができる。軸数は1軸〜3軸あり、この実施形態では3軸を想定している。しかし、少なくとも紙面に沿った平面に対して垂直な方向の加速度を検知できる加速度センサであればよい。
ジャイロセンサ5も周知のセンサであり、角速度を検出するセンサであって、1度の積分演算処理によって物体の角度を検出することができる。軸数は1軸〜3軸あり、この実施形態では3軸を想定している。ただし、紙面に沿った平面におけるインクジェットヘッド2の幅方向である主走査方向をX、長手方向である副走査方向をY、上記平面に垂直な高さ方向をZとしたとき、X−Z方向の傾きとY−Z方向の傾きを検知できるのが望ましい。
The
The
ユーザが、このハンディモバイルプリンタ1を持ち上げた場合、座標検知センサ3a,3bの検知解像度が著しく低下し、検知した座標情報が実際の情報とは大きく異なってしまう。
この時、加速度センサ4の加速度情報から、2重積分演算処理により上記平面に垂直な高さ方向の移動距離を算出することができる。したがって、持ち上げられた加速度を検知して、高さ変化の距離を算出することができる。また、紙面上から垂直方向にのみ持ち上げることは不可能であるから、X、Y方向の距離も同様に算出する。
この距離情報により座標情報を補正できるので、ハンディモバイルプリンタ1は位置情報を見失うことなく、印字を継続することができる。
When the user lifts the handy
At this time, the moving distance in the height direction perpendicular to the plane can be calculated from the acceleration information of the
Since the coordinate information can be corrected by the distance information, the handy
一般的に、加速度から距離を算出する際、2度の積分演算処理が入るため、距離の精度は座標検知センサの精度より劣る。
しかし、座標検知センサ3a,3bの検知精度は、一般的な印字解像度(600dpiや1200dpi)の10倍以上のものがあり、加速度からの演算処理後の距離精度も、印字解像度と同等の精度を有するものがある。
最終的に、印字解像度と同等の精度を算出できれば、画像に影響のない位置補正が成り立つ。
Generally, when calculating the distance from the acceleration, since the integration calculation process is performed twice, the accuracy of the distance is inferior to that of the coordinate detection sensor.
However, the detection accuracy of the coordinate
Finally, if an accuracy equivalent to the print resolution can be calculated, position correction that does not affect the image is established.
さらに、ジャイロセンサ5の角速度情報から、積分演算処理によりハンディモバイルプリンタ1の角度(空中での紙面に平行な方向に対する傾き)を算出することができる。
よって、空中でのハンディモバイルプリンタ1の3軸(X,Y,Z)の傾きを測定及び算出することができる。この角度情報により、空中での傾き情報を把握することによって、図13に示した各ノズル6の位置情報を算出することができる。
Furthermore, from the angular velocity information of the
Therefore, the inclinations of the three axes (X, Y, Z) of the handy
一般的に、角速度から距離を算出する際、積分演算処理が入るため、角度の精度は座標検知センサの精度より劣る。
しかし、座標検知センサの検知精度は一般的な印字解像度(600dpiや1200dpi)の10倍以上のものがあり、角速度からの演算処理後の角度精度も、印字解像度同等の精度を有するものがある。
最終的に、印字解像度同等の精度を算出できれば画像に影響のない位置補正が成り立つ。
In general, when calculating the distance from the angular velocity, an integration calculation process is performed, so that the accuracy of the angle is inferior to that of the coordinate detection sensor.
However, the detection accuracy of the coordinate detection sensor is more than 10 times the general print resolution (600 dpi or 1200 dpi), and the angle accuracy after the calculation processing from the angular velocity has the same accuracy as the print resolution.
Finally, if an accuracy equivalent to the print resolution can be calculated, position correction that does not affect the image is established.
図2はこのハンディモバイルプリンタを動作させる制御部の構成を示すブロック図であり、図14と対応する部分には同一の符号を付してある。ただし、CPU11の機能及びROM14に格納されたプログラムは、図14におけるCPU11及びROM14とは異なっている。
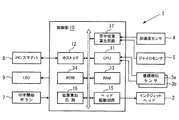
そして、この実施形態のハンディモバイルプリンタ1は、図14によって説明した従来と同様な構成に加え、プリンタの空中状態を検知するために、前述した加速度センサ4及びジャイロセンサ5と、制御部10内に空中位置算出回路17を設けている。
この空中位置算出回路17も、システムバスを介してCPU11等とデータ及び信号のやり取りが可能に接続されている。
FIG. 2 is a block diagram showing a configuration of a control unit for operating the handy mobile printer, and portions corresponding to those in FIG. 14 are denoted by the same reference numerals. However, the function of the
The handy
The aerial
その空中位置算出回路17は、加速度センサ4による加速度情報とジャイロセンサ5からの角速度情報から、ハンディモバイルプリンタ1自身の紙面に対する空中位置を算出する。この空中位置算出回路17としては、ASICやFPGAを想定しているが、CPU11が印刷走査に対して十分に高速処理できる場合は、CPU11の機能に代えることもできる。図2では独立した空中位置算出回路17として示している。
The aerial
この第1の実施形態の制御部10において、CPU11と位置算出回路16が、座標検知センサ3a,3bによって検知される位置情報からインクジェットヘッド2のノズルの位置座標を算出する位置算出手段に相当する。
また、CPU11と空中位置算出回路17が、加速度センサ4によって検知される加速度情報から紙面に沿った平面に対して垂直な方向への移動距離を算出する距離算出手段と、ジャイロセンサ5によって検知される角速度情報から上記平面に対する傾き角度を算出する角度算出手段に相当する。
In the control unit 10 of the first embodiment, the
Further, the
さらに、CPU11とRAM13によって、位置算出手段によって算出されたノズルの位置座標を、上記距離算出手段によって算出された移動距離と上記角度算出手段によって算出された傾き角度とによって補正する位置座標補正手段の機能を果す。
そして、CPU11とヘッド駆動回路15によって、上記位置座標補正手段によって補正されたノズルの位置座標が画データと一致したときに、対象ノズルからインクを吐出させるようにインクジェットヘッド2を制御するヘッド駆動制御手段の機能を果す。
Further, the position coordinate correcting unit corrects the position coordinates of the nozzle calculated by the position calculating unit by the
Then, when the position coordinates of the nozzles corrected by the position coordinate correction means coincide with the image data by the
図3は、この第1の実施形態のハンディモバイルプリンタ1による印刷動作の流れを、空中位置算出に係る部分を除いて示すフローチャートである。図4は、その空中位置算出に係る部分のフローチャートである。この図3と図4は一連の印刷動作を示すフローチャートであり、同じ端子記号の流れ線は接続されている。
FIG. 3 is a flowchart showing the flow of the printing operation by the handy
図2における制御部10のCPU11等が実行する図3のステップS101〜S112の各処理は、従来のハンディモバイルプリンタの図14に示した制御部110のCPU11等による、図15によって説明したステップS1〜S12の各処理と同様である。したがって、それらの各ステップの処理については説明を省略する。ユーザが行うステップU1〜U3の各動作も図15と同様である。
ただし、ステップS104ではLED9を点滅させて印字開始準備完了を、ステップS112ではLED9を点灯させて印字完了をユーザに報知するが、LED9に代えてスピーカやブザーを設けて、音声やブザー音によってそれらを報知するようにしてもよい。
3 are executed by the
However, in step S104, the
ハンディモバイルプリンタ1に搭載している座標検知センサ3a,3b、加速度センサ4、およびジャイロセンサ5は、常時一定の時間間隔で位置情報、加速度情報、角速度情報を検出する。そのため、制御部10のCPU11がステップS107でプリンタ周辺の画データをヘッド駆動回路15へ転送した後、ステップS108で座標検知センサ3a,3bから位置情報を取得して各ノズルの座標を算出し、RAM13に記憶している位置情報を更新する。
The coordinate
それと並行して、空中位置算出回路17が、図4のステップS120でジャイロセンサ5から角速度情報を取得して更新し、ステップS121で加速度センサ4から加速度情報を取得して更新する。その更新は、それぞれRAM13に記憶している角速度情報及び加速度情報を書き換えて更新する。
空中位置算出回路17は、ステップS122で、更新した角速度情報を積分演算し、空中での紙面に平行な平面に対する傾きの角度情報を算出する。また、ステップS123で、更新した加速度情報を積分演算し、紙面上からの距離(高さ)情報を算出する。
At the same time, the aerial
In step S122, the aerial
そして、ステップS124でZ軸(高さ)方向に加速度が発生しているかどうかを判断する。その結果、加速度が発生していない場合は、図3のステップS109へ進んで、ノズルの座標が画データと一致していればステップS110で印字を行ない、一致していなければステップS108及び図4のS120,S121へ戻る。 In step S124, it is determined whether or not acceleration is generated in the Z-axis (height) direction. As a result, if no acceleration is generated, the process proceeds to step S109 in FIG. 3. If the coordinates of the nozzle match the image data, printing is performed in step S110. Return to S120 and S121.
図4のステップS124で、加速度が発生していると判断した場合は、プリンタが紙面上から浮いていることを示す。そのため、CPU11は空中位置算出回路17がステップS122、S123で算出した情報に基づいて、ステップS125で高さ又は傾きが設定された閾値以下であるかどうかを判断する。
ここでの閾値とは、ノズル6から吐出するインク滴が仕様内の精度で紙面に着弾できるかどうかの閾値であり、要は印刷が正常にできるかどうかの閾値である。
If it is determined in step S124 in FIG. 4 that acceleration has occurred, it indicates that the printer is floating above the paper. Therefore, the
Here, the threshold value is a threshold value for determining whether or not the ink droplets ejected from the
ここで、その閾値について説明する。
図5は、図1に示したインクジェットヘッド2の傾きが0の場合のX軸方向の断面図であり、図6は、同じくその傾きがαの場合のX軸方向の断面図である。
例えば、図5に示すように紙面P上に平行にハンディモバイルプリンタ1がある場合、そのインクジェットヘッド2のノズル6の間隔をN、高さをH、ヘッド幅をXでそれぞれ示す。
Here, the threshold value will be described.
5 is a cross-sectional view in the X-axis direction when the inclination of the
For example, when the handy
実際にプリンタが空中で傾いた場合、図6に示すように、各ノズル位置によってその高さは異なる。しかし、インクジェットヘッド2のX軸方向(主走査方向)の中央が持ち上がった距離をZ、X軸方向の傾き角度をαとすると、最大上昇距離及び最小上昇距離とノズルの間隔を、次式によって算出することができる。
最大上昇距離=Z+(X/2)sinα
最小上昇距離=Z−(X/2)sinα
ノズルの間隔=Ncosα
When the printer is actually tilted in the air, the height varies depending on each nozzle position, as shown in FIG. However, if the distance that the center of the X-axis direction (main scanning direction) of the
Maximum ascent distance = Z + (X / 2) sinα
Minimum ascent distance = Z- (X / 2) sinα
Nozzle spacing = Ncosα
インクジェットヘッド2が長さ方向であるY軸方向(副走査方向)に傾いた場合は、その中央が持ち上がった距離をZ、Y軸方向の傾き角度をβとすると、最大上昇距離及び最小上昇距離とノズルの間隔を、次式によって算出することができる。
最大上昇距離=Z+(Y/2)sinβ
最小上昇距離=Z−(Y/2)sinβ
ノズルの間隔=Ncosβ
When the
Maximum ascent distance = Z + (Y / 2) sinβ
Minimum ascent distance = Z- (Y / 2) sinβ
Nozzle spacing = Ncosβ
ノズル6からのインク滴は紙面Pに対して垂直に吐出できると仮定すると、上記の各情報により、各ノズル6の平面上に置き換えた座標を算出でき、高さ方向の距離により、吐出から着弾までの時間を算出することができる。
この高さ(距離)と傾き(角度)のいずれも閾値以下でない場合、すなわちいずれかが閾値を超える場合は、印刷画質に悪影響があるため、図4のステップS130で印字を停止させる。傾きは、X−Z方向の傾きとY−Z方向の傾きのいずれかが閾値を超えた場合は、印字を停止させる。
Assuming that the ink droplets from the
If neither the height (distance) nor the inclination (angle) is less than or equal to the threshold, that is, if either exceeds the threshold, the print image quality is adversely affected, and printing is stopped in step S130 in FIG. Inclination stops printing when either the XZ direction inclination or the YZ direction inclination exceeds a threshold value.
これが、距離算出手段によって算出された移動距離と角度算出手段によって算出された傾き角度の少なくとも一方が、設定された閾値を超えた場合は印刷を停止する手段の機能に相当する。なお、傾き角度に対して設定する閾値を、印刷の解像度に応じて変更するようにしてもよい。その場合、印刷の解像度が高いときには低いときより閾値を下げる。
この高さと傾きがいずれも閾値以下である場合は、印字を継続するため、空中位置算出回路17はステップS126で角度情報を座標化し、ステップS127で距離情報を座標化する。この時、座標検知センサ3a,3bの出力解像度の座標に変換する。
This corresponds to a function of means for stopping printing when at least one of the movement distance calculated by the distance calculation means and the inclination angle calculated by the angle calculation means exceeds a set threshold value. Note that the threshold set for the tilt angle may be changed according to the printing resolution. In this case, the threshold is lowered when the printing resolution is high than when the printing resolution is low.
If both the height and the inclination are less than or equal to the threshold value, the aerial
そして、ステップS126,S127で算出された各ノズル6の座標位置を補正位置情報として、CPU11が図3のステップS128でそれを取得し、ステップS108で座標検知センサ3a,3bから取得してRAM13に記憶した位置座標を更新する。
要は、ハンディモバイルプリンタ1が持ち上げられた際に、空中の位置情報による補正を行う処理を実現する。この処理が、位置座標補正手段の機能に相当する。
その後のステップS109〜S112の処理は、図15によって説明したステップS9〜S12の各処理と同じである。ステップS109の判断とステップS110の印字処理が、位置座標補正手段によって補正されたノズルの位置座標が画データと一致したときに、対象ノズルからインクを吐出させるようにインクジェットヘッド2を制御するヘッド駆動制御手段の機能に相当する。
Then, the
In short, when the handy
Subsequent steps S109 to S112 are the same as steps S9 to S12 described with reference to FIG. The head drive that controls the
以上の制御処理によって、ハンディモバイルプリンタ1を持ち上げた場合でも、各ノズル6の座標情報を、加速度情報と角速度情報に基づいて補正することができ、その補正した情報に基づいてインクの吐出タイミングを調整することができる。したがって、ハンディモバイルプリンタ1が位置情報を見失うことなく、印字を継続することができる。
そのため、この実施形態のハンディモバイルプリンタ1を使用すれば、紙面からある程度持ち上がって傾いても、そのまま印字を続けることが可能となり、印刷の無駄が生じない。そして、スムーズに正常な印刷を完遂でき、ユーザビリティが向上する。
なお、このハンディモバイルプリンタ1の平面上の走査速度を検知し、走査速度が速すぎて正常に印刷が続けられない場合には印刷を停止し、走査速度が正常な印刷が可能な所定値以下になったら、加速度情報から位置を補正後、印刷を再開するようにしてもよい。
With the above control process, even when the handy
For this reason, if the handy
Note that the scanning speed on the plane of the handy
〔第2の実施形態〕
次に、この発明によるハンディモバイルプリンタの第2の実施形態を図7によって説明する。図7はそのハンディモバイルプリンタ1′の基本構成を示す模式的な底面図であり、図1と同じ部分には同一の符号を付し、それらの説明は省略する。
この第2の実施形態のハンディモバイルプリンタ1′が、第1の実施形態のハンディモバイルプリンタ1と異なるのは、加速度センサ及びジャイロセンサを、それぞれ間隔を置いて複数個設置した点だけである。
[Second Embodiment]
Next, a second embodiment of the handy mobile printer according to the present invention will be described with reference to FIG. FIG. 7 is a schematic bottom view showing the basic configuration of the handy
The handy
すなわち、このハンディモバイルプリンタ1′の底面1aには、一方の対角位置に一対の加速度センサ4a,4bを、他方の対角位置に一対のジャイロセンサ5a,5bを、それぞれ間隔を置いて設置している。
このように、ハンディモバイルプリンタ1′の底面1aの対角位置に加速度センサとジャイロセンサをそれぞれ設置した場合、1個ずつの構成では検知しにくかった傾きをより高い精度で検知することができる。
例えば、加速度センサ4aとジャイロセンサ5aを結ぶ線上を中心に回転した場合、その線上にある加速度センサ4aとジャイロセンサ5aで検知できるのは微小な変化に留まる。しかし、他方の加速度センサ4bとジャイロセンサ5bで検知できる加速度及び角速度は、ハンディモバイルプリンタ1′のサイズにもよるが、大きな変化を検知することができる。
That is, on the
As described above, when the acceleration sensor and the gyro sensor are respectively installed at the diagonal positions of the
For example, when rotating around a line connecting the
そのため、実際に補正位置情報を算出する際にも、精度よく実際の動作に追従できる。
したがって、この第2の実施形態によれば、プリンタを持ち上げた際の位置補正情報の精度を向上することができる。
この第2の実施形態における制御部の構成は図示しないが、図2に示した第1の実施形態における制御部10と同様な構成で、その空中位置算出回路17に、複数の加速度センサ4a,4b及び複数のジャイロセンサ5a,5bの各検知信号を入力させる。
For this reason, even when the correction position information is actually calculated, the actual operation can be accurately followed.
Therefore, according to the second embodiment, the accuracy of the position correction information when the printer is lifted can be improved.
Although the configuration of the control unit in the second embodiment is not shown, the configuration is similar to that of the control unit 10 in the first embodiment shown in FIG. 2, and the aerial
〔第3の実施形態〕
次に、この発明によるハンディモバイルプリンタの第3の実施形態を図8によって説明する。図8はそのハンディモバイルプリンタ1Aの図2に相当するブロック図であり、図2と同じ部分には同一の符号を付し、それらの説明は省略する。ただし、その制御部10AにおけるCPU11の機能及びROM14に格納したプログラムは、図2における制御部10のCPU11及びROM14のそれらとは若干相違する。
なお、以下の第3〜第6の各実施形態のハンディモバイルプリンタの模式的な底面図は省略するが、第3、第4、第6の実施形態のハンディモバイルプリンタは、図1に示した第1の実施形態の模式的な底面図と同じである。第5の実施形態のハンディモバイルプリンタは、図1に示した第1の実施形態の模式的な底面図における1対の座標検知センサ3a,3bに代えて1個の座標検知センサ3を設けている。
[Third Embodiment]
Next, a third embodiment of the handy mobile printer according to the present invention will be described with reference to FIG. FIG. 8 is a block diagram corresponding to FIG. 2 of the handy
Although the schematic bottom views of the handy mobile printers of the following third to sixth embodiments are omitted, the handy mobile printers of the third, fourth, and sixth embodiments are shown in FIG. It is the same as the schematic bottom view of the first embodiment. The handy mobile printer of the fifth embodiment is provided with one coordinate
第1の実施形態では、平面上では複数の座標検知センサ3a,3bの位置検知情報のみによって、インクジェットヘッド2の各ノズル6の座標位置を算出した。これに対し、第3の実施形態では、加速度センサ4による加速度情報も利用(加味)してノズル6の座標位置を算出する。
そのため、この第3の実施形態のハンディモバイルプリンタ1Aは、加速度センサ4の検知信号を、制御部10Aの空中位置算出回路17と共に、CPU11にも入力させるようにしている。
In the first embodiment, the coordinate position of each
Therefore, the handy
座標検知センサ3a,3bによる位置検知情報は、速度に応じて若干の検知ズレが発生する。座標検知センサ3a,3bの仕様範囲内の速度で動作させる上では、若干のズレであるが、誤差は蓄積されるので、プリンタによる印字としては、できる限り誤差を小さくするのが望ましい。
In the position detection information by the coordinate
加速度センサ4によって検出される加速度を積分すれば速度を検出することができるので、CPU11はその検出速度に応じて、座標検知センサ3a,3bによって検知した座標情報に補正をかけることができる。それにより、位置算出回路16によって、インクジェットヘッド2の各ノズル6の座標位置を精度よく算出することができる。
したがって、この第3の実施形態によれば、平面上の位置検知精度をより高めることが可能になり、印刷画像の高解像度化を実現することができる。
Since the speed can be detected by integrating the acceleration detected by the
Therefore, according to the third embodiment, it is possible to further improve the position detection accuracy on the plane, and it is possible to realize high resolution of the printed image.
〔第4の実施形態〕
次に、この発明によるハンディモバイルプリンタの第4の実施形態を図9によって説明する。図9はそのハンディモバイルプリンタ1Bの図2に相当するブロック図であり、図2と同じ部分には同一の符号を付し、それらの説明は省略する。ただし、その制御部10BにおけるCPU11の機能及びROM14に格納したプログラムは、図2における制御部10のCPU11及びROM14のそれらとは若干相違する。
第1の実施形態では、平面上では複数の座標検知センサ3a,3bの位置検知情報のみによって、インクジェットヘッド2の各ノズル6の座標位置を算出した。これに対し、第4の実施形態では、ジャイロセンサ5による角速度情報も利用(加味)して、ノズル6の座標位置を算出する。
[Fourth Embodiment]
Next, a fourth embodiment of the handy mobile printer according to the present invention will be described with reference to FIG. FIG. 9 is a block diagram corresponding to FIG. 2 of the handy
In the first embodiment, the coordinate position of each
そのため、この第4の実施形態のハンディモバイルプリンタ1Bは、ジャイロセンサ5の検知信号を、制御部10Bの空中位置算出回路17と共に、CPU11にも入力させるようにしている。
座標検知センサ3a,3bによる位置検知情報は、回転速度に応じて若干の検知ズレが発生する。座標検知センサ3a,3bの仕様範囲内の回転速度で動作させる上では、若干のズレであるが、誤差は蓄積されるので、プリンタによる印字としては、できる限り誤差を小さくするのが望ましい。
Therefore, the handy
The position detection information by the coordinate
ジャイロセンサ5は角速度(回転速度)を検出することができるので、CPU11はその検出角速度に応じて、座標検知センサ3a,3bによって検知した座標情報に補正をかけることができる。それにより、位置算出回路16によって、インクジェットヘッド2の各ノズル6の座標位置を精度よく算出することができる。
したがって、この第4の実施形態によれば、平面上の位置検知精度をより高めることが可能になり、印刷画像の高解像度化を実現することができる。
Since the
Therefore, according to the fourth embodiment, it is possible to further improve the position detection accuracy on the plane, and it is possible to realize a higher resolution of the printed image.
〔第5の実施形態〕
次に、この発明によるハンディモバイルプリンタの第5の実施形態を図10によって説明する。図10はそのハンディモバイルプリンタ1Cの図2に相当するブロック図であり、図2と同じ部分には同一の符号を付し、それらの説明は省略する。
この第5の実施形態のハンディモバイルプリンタ1Cの制御部20は、第1の実施形態における図2に示した制御部10のCPU11及び空中位置算出回路17に代えて、位置算出回路16及びヘッド駆動回路15を内蔵した、SoC FPGA18を搭載している。
このSoC FPGA18は、システムバスを介してホストI/F12,RAM13及びROM14とデータ及び信号のやり取りが可能である。
また、このハンディモバイルプリンタ1Cは、座標情報を検知するために複数個の座標検知センサ3a,3bを設ける代わりに、1個の座標検知センサ3を設けるだけで済むようにしている。
[Fifth Embodiment]
Next, a fifth embodiment of the handy mobile printer according to the present invention will be described with reference to FIG. FIG. 10 is a block diagram corresponding to FIG. 2 of the handy mobile printer 1C. The same parts as those in FIG. 2 are denoted by the same reference numerals, and description thereof is omitted.
The control unit 20 of the handy mobile printer 1C of the fifth embodiment replaces the
The
In addition, the handy mobile printer 1C only needs to provide one coordinate
この座標検知センサ3としては、例えば高解像のCMOSセンサを使用し、移動度合いの検出方法として、注目画像の移動度合いを算出するのではなく、画像のパターンマッチングを行なうことにより、移動度合いの回転方向まで算出することが可能になる。
SoC FPGA18の「SoC」は、System On a Chip の略称であり、ワンチップに組み込んだシステムである。「FPGA」は、Field Programmable Gate Array の略称であり、現場でプログラム可能なゲートアレイの意味である。
As the coordinate
“SoC” of the
FPGAは、回路を構成する素材であるロジックセル、乗算器、RAM等を内臓しており、それらを組み合わせて専用の回路を作り、処理の順番に沿って各専用回路を繋いで動作させる。そして、CPUのようにプログラムに従って順番に動作するのではなく、信号が来たら、ハードウエア処理ですぐに動作し、複数の機能の並列処理も可能である。 The FPGA includes a logic cell, a multiplier, a RAM, and the like, which are materials constituting the circuit, and a dedicated circuit is created by combining them, and the dedicated circuits are connected and operated in the order of processing. Instead of operating in sequence according to a program as in the case of a CPU, when a signal is received, it operates immediately by hardware processing, and parallel processing of a plurality of functions is also possible.
このSoC FPGA18に、第1の実施形態の制御部10におけるCPU11、ヘッド駆動回路15、位置算出回路16、及び空中位置算出回路17の機能を全て持たせている。すなわち、前述した位置算出手段、距離算出手段、角度算出手段、位置座標補正手段、及びヘッド駆動制御手段を、1個のモジュールに集約したことになる。
したがって、この第5の実施形態のハンディモバイルプリンタ1Cは、座標検知センサ3を1個にすると共に、制御部20にワンチップのプログラマブル・ゲートアレイであるSoC FPGA18を使用したため、一層の小型化と高速化(高生産性)を実現する。
The
Therefore, the handy mobile printer 1C according to the fifth embodiment uses one coordinate
〔第6の実施形態〕
次に、この発明によるハンディモバイルプリンタの第6の実施形態を図11によって説明する。図11はそのハンディモバイルプリンタ1Dの図2に相当するブロック図であり、図2と同じ部分には同一の符号を付し、それらの説明は省略する。
この第6の実施形態のハンディモバイルプリンタ1Dは、第1の実施形態における図2に示した制御部10を制御部30に変えている。その制御部30は、制御部10と同じ構成に、センサ異常検知回路19を追加しただけである。そのセンサ異常検知回路19も、システムバスを介してCPU11等とデータ及び信号のやり取りが可能に接続されている。
[Sixth Embodiment]
Next, a sixth embodiment of the handy mobile printer according to the present invention will be described with reference to FIG. FIG. 11 is a block diagram corresponding to FIG. 2 of the handy mobile printer 1D. The same parts as those in FIG.
In the handy mobile printer 1D of the sixth embodiment, the control unit 10 shown in FIG. 2 in the first embodiment is changed to a control unit 30. The control unit 30 has only the sensor
そのセンサ異常検知回路19は、複数の座標検知センサ3a,3b、加速度センサ4、及びジャイロセンサ5の各検知信号を全て入力し、そのいずれかに異常があれば、センサ異常を検知して、CPU11に知らせるセンサ異常検知手段である。
例えば、ユーザがフリーハンドでハンディモバイルプリンタ1Dを移動させた際に、座標検知センサ3a又は3bの情報が更新されず、加速度センサ4やジャイロセンサ5の検知信号による距離及び角度情報が更新されたとする。
その場合、更新されない座標検知センサ3a又は3bが故障したと判断される。あるいは、座標検知センサ3a,3bとジャイロセンサ5の情報が更新され、加速度センサ4の情報が更新されなかった場合は、加速度センサ4が故障したと判断される。
The sensor
For example, when the user moves the handy mobile printer 1D freehand, the information of the coordinate
In this case, it is determined that the coordinate
すなわち、センサ異常検知回路19は、入力された各センサからの情報に基づいて、更新されなかったセンサがいずれかを判断する。そして、座標検知センサ3a,3b、加速度センサ4、及びジャイロセンサ5のいずれかが故障し、センサ異常を検知したときに、CPU11は、故障したセンサに対応するLEDを点灯あるいは点滅させて、そのセンサ異常をユーザに報知する。LEDに代えて、スピーカやブザー等を動作させて、音声やブザー音などでセンサ異常をユーザに報知するようにしてもよい。
That is, the sensor
センサ異常検知回路19が印刷途中でセンサ異常を検知したとき、CPU11は故障によって更新されない情報が他のセンサからの情報で補填できる情報であれば、そのセンサで機能を代替して印刷を続行する。
このようにすることにより、センサの一部が故障してもユーザがプリンタを使用できない時間(ダウンタイム)を軽減することができる。
When the sensor
By doing so, it is possible to reduce the time during which the user cannot use the printer (downtime) even if a part of the sensor breaks down.
例えば、座標検知センサ3a,3bのいずれかが故障したとしても、加速度センサ4及びジャイロセンサ5から得られる情報で、低解像度の印刷を続行することができる。
そこで、印刷中にセンサ異常検知回路19によって座標検知センサ3a,3bのいずれかの異常が検知された場合、そのまま低解像度で印刷を続行するか、一度印刷を停止して、新たに低解像度の印刷を開始するか否かをユーザが選択できるようにしてもよい。
For example, even if one of the coordinate
Therefore, when any abnormality of the coordinate
〔プログラムの実施形態〕
この発明によるプログラムの実施形態は、例えば図2に示した第1の実施形態のハンディモバイルプリンタ1を制御する制御部10に相当するコンピュータを、次の各手段として機能させるためのプログラムである。
そのハンディモバイルプリンタ1は、図1及び図13に示したように、ノズル6を有するインクジェットヘッド2と、紙面に沿った平面上の相対的な位置を検知する座標検知センサ3a,3bを備えている。さらに、少なくともその平面に対して垂直な方向の加速度を検知する加速度センサ4と、上記平面に対する傾きの角速度を検知するジャイロセンサ5とを備えている。そして、人の手で紙面上を走査されながら画データに応じて上記ノズル6からインクを吐出して印刷する。
[Program Embodiment]
The embodiment of the program according to the present invention is a program for causing a computer corresponding to the control unit 10 that controls the handy
As shown in FIGS. 1 and 13, the handy
そのプログラムが上記コンピュータを機能させるのは、少なくとも次の各手段である。
・座標検知センサ3a,3bによって検知される位置情報からノズル6の位置座標を算出する位置算出手段、
・加速度センサ4によって検知される加速度情報から上記平面に対して垂直な方向への移動距離を算出する距離算出手段、
・ジャイロセンサ5によって検知される角速度情報から上記平面に対する傾き角度を算出する角度算出手段、
The program causes the computer to function at least the following means.
Position calculation means for calculating the position coordinates of the
A distance calculating means for calculating a moving distance in a direction perpendicular to the plane from acceleration information detected by the
An angle calculating means for calculating an inclination angle with respect to the plane from the angular velocity information detected by the
・上記位置算出手段によって算出されたノズル6の位置座標を、上記距離算出手段によって算出された移動距離と上記角度算出手段によって算出された傾き角度とによって補正する位置座標補正手段、
・その位置座標補正手段によって補正されたノズル6の位置座標が上記画データと一致したときに、ノズル6からインクを吐出させるようにインクジェットヘッド2を制御するヘッド駆動制御手段、
A position coordinate correction unit that corrects the position coordinates of the
A head drive control means for controlling the
さらに、前述した他の各実施形態の各ハンディモバイルプリンタを制御する各制御部に相当するコンピュータを、それぞれその制御部に必要な各手段として機能させるためのプログラムも提供することができる。
そのハンディモバイルプリンタを制御するコンピュータは、例えば図2に示した制御部10のCPU11、RAM13及びROM14等によって構成されるマイクロコンピュータである。
Furthermore, it is also possible to provide a program for causing a computer corresponding to each control unit that controls each handy mobile printer of each of the other embodiments described above to function as each unit necessary for the control unit.
The computer that controls the handy mobile printer is, for example, a microcomputer that includes the
そのプログラムは、初めからハンディモバイルプリンタの制御部10を構成するROM14に格納しておいてもよいが、CD−ROMやフロッピディスクその他のコンピュータ読み取り可能な記録媒体に記録して提供してもよい。あるいは、インタネット等のネットワークを介して、そのプログラムをハンディモバイルプリンタのメモリにダウンロードできるように提供することもできる。
The program may be stored in the
以上、この発明の各実施形態について説明してきたが、その実施形態の各部の具体的な構成や処理の内容等は、そこに記載したものに限るものではない。
また、この発明は上述した各実施形態に限定されるものではなく、特許請求の範囲の各請求項に記載された技術的特徴を有する以外は、何ら限定されるものではないことは言うまでもない。
さらに、以上説明してきた各実施形態の構成例、動作例及び変形例等は、適宜変更又は追加したり一部を削除してもよく、相互に矛盾しない限り任意に組み合わせて実施することも可能であることは勿論である。
As mentioned above, although each embodiment of this invention has been described, the specific configuration of each part of the embodiment, the content of processing, and the like are not limited to those described therein.
Moreover, this invention is not limited to each embodiment mentioned above, It cannot be overemphasized that it is not limited at all except having the technical feature described in each claim of a claim.
Furthermore, the configuration examples, operation examples, modification examples, and the like of each embodiment described above may be changed or added as appropriate, or a part thereof may be deleted, and may be implemented in any combination as long as they do not contradict each other. Of course.
1,1′,1A〜1D,100:ハンディモバイルプリンタ(ハンディモバイル・インクジェットプリンタ) 2:インクジェットヘッド
3,3a,3b:座標検知センサ 4,4a,4b:加速度センサ
5,5a,5b:ジャイロセンサ 6:ノズル 7:印字開始ボタン
8:パーソナルコンピュータ又はスマートデバイス(PC/スマデバ)
9:LED 10,10A,10B,20,30,110:制御部 11:CPU
12:ホストI/F 13:RAM 14:ROM 15:ヘッド駆動回路
16:位置算出回路 17:空中位置算出回路 18:SoC FPGA
19:センサ異常検知回路
1, 1 ', 1A-1D, 100: Handy mobile printer (handy mobile inkjet printer) 2: Inkjet head
3, 3a, 3b: Coordinate
5, 5a, 5b: Gyro sensor 6: Nozzle 7: Print start button
8: Personal computer or smart device (PC / Smadeva)
9: LED 10, 10A, 10B, 20, 30, 110: Control unit 11: CPU
12: Host I / F 13: RAM 14: ROM 15: Head drive circuit
16: Position calculation circuit 17: Aerial position calculation circuit 18: SoC FPGA
19: Sensor abnormality detection circuit
Claims (12)
紙面に沿った平面上の相対的な位置を検知する座標検知センサと、
少なくとも前記平面に対して垂直な方向の加速度を検知する加速度センサと、
前記平面に対する傾きの角速度を検知するジャイロセンサと、
前記座標検知センサによって検知される位置情報から前記ノズルの位置座標を算出する位置算出手段と、
前記加速度センサによって検知される加速度情報から前記平面に対して垂直な方向への移動距離を算出する距離算出手段と、
前記ジャイロセンサによって検知される角速度情報から前記平面に対する傾き角度を算出する角度算出手段と、
前記位置算出手段によって算出された前記ノズルの位置座標を、前記距離算出手段によって算出された移動距離と前記角度算出手段によって算出された傾き角度とによって補正する位置座標補正手段と、
該位置座標補正手段によって補正された前記ノズルの位置座標が前記画データと一致したときに、前記ノズルからインクを吐出させるように前記インクジェットヘッドを制御するヘッド駆動制御手段と、
を設けたことを特徴とするハンディモバイルプリンタ。 A handy mobile printer that includes an inkjet head having nozzles and that prints by ejecting ink from the nozzles according to image data while being scanned on a paper surface by a human hand,
A coordinate detection sensor for detecting a relative position on a plane along the paper surface;
An acceleration sensor that detects acceleration in a direction perpendicular to at least the plane;
A gyro sensor for detecting an angular velocity of inclination with respect to the plane;
Position calculating means for calculating position coordinates of the nozzle from position information detected by the coordinate detection sensor;
Distance calculating means for calculating a moving distance in a direction perpendicular to the plane from acceleration information detected by the acceleration sensor;
Angle calculating means for calculating an inclination angle with respect to the plane from angular velocity information detected by the gyro sensor;
Position coordinate correction means for correcting the position coordinates of the nozzle calculated by the position calculation means by the movement distance calculated by the distance calculation means and the inclination angle calculated by the angle calculation means;
Head drive control means for controlling the inkjet head so that ink is ejected from the nozzles when the position coordinates of the nozzles corrected by the position coordinate correction means match the image data;
Handy mobile printer characterized by providing
前記距離算出手段によって算出された移動距離と前記角度算出手段によって算出された傾き角度の少なくとも一方が、設定された閾値を超えた場合は印刷を停止する手段を有することを特徴とするハンディモバイルプリンタ。 The handy mobile printer according to claim 1,
A handy mobile printer comprising: means for stopping printing when at least one of a moving distance calculated by the distance calculating means and an inclination angle calculated by the angle calculating means exceeds a set threshold value .
前記座標検知センサ、前記加速度センサ、及び前記ジャイロセンサのいずれかが故障した場合に、センサ異常を検知するセンサ異常検知手段を設けたことを特徴とするハンディモバイルプリンタ。 In the handy mobile printer according to any one of claims 1 to 8,
A handy mobile printer, comprising: a sensor abnormality detection unit that detects a sensor abnormality when any of the coordinate detection sensor, the acceleration sensor, and the gyro sensor fails.
前記センサ異常検知手段が前記センサ異常を検知したときに、該センサ異常を報知する報知手段を設けたことを特徴とするハンディモバイルプリンタ。 The handy mobile printer according to claim 9, wherein
A handy mobile printer, comprising: a notification means for notifying the sensor abnormality when the sensor abnormality detection means detects the sensor abnormality.
前記センサ異常検知手段が印刷途中で前記センサの異常を検知したときに、更新されない情報が他のセンサからの情報で補填できる情報であれば印刷を続行する手段を設けたことを特徴とするハンディモバイルプリンタ。 The handy mobile printer according to claim 9 or 10,
Handy provided with means for continuing printing when the sensor abnormality detecting means detects abnormality of the sensor during printing and information that cannot be updated can be compensated by information from other sensors. Mobile printer.
前記座標検知センサによって検知される位置情報から前記ノズルの位置座標を算出する位置算出手段と、
前記加速度センサによって検知される加速度情報から前記平面に対して垂直な方向への移動距離を算出する距離算出手段と、
前記ジャイロセンサによって検知される角速度情報から前記平面に対する傾き角度を算出する角度算出手段と、
前記位置算出手段によって算出された前記ノズルの位置座標を、前記距離算出手段によって算出された移動距離と前記角度算出手段によって算出された傾き角度とによって補正する位置座標補正手段と、
該位置座標補正手段によって補正された前記ノズルの位置座標が前記画データと一致したときに、前記ノズルからインクを吐出させるように前記インクジェットヘッドを制御するヘッド駆動制御手段として機能させるためのプログラム。 An inkjet head having a nozzle; a coordinate detection sensor that detects a relative position on a plane along the plane of the paper; an acceleration sensor that detects acceleration in a direction at least perpendicular to the plane; and an angular velocity of inclination with respect to the plane A computer that controls a handy mobile printer that prints by ejecting ink from the nozzles according to image data while being scanned on a paper surface by a human hand,
Position calculating means for calculating position coordinates of the nozzle from position information detected by the coordinate detection sensor;
Distance calculating means for calculating a moving distance in a direction perpendicular to the plane from acceleration information detected by the acceleration sensor;
Angle calculating means for calculating an inclination angle with respect to the plane from angular velocity information detected by the gyro sensor;
Position coordinate correction means for correcting the position coordinates of the nozzle calculated by the position calculation means by the movement distance calculated by the distance calculation means and the inclination angle calculated by the angle calculation means;
A program for functioning as a head drive control unit for controlling the inkjet head so that ink is ejected from the nozzle when the position coordinate of the nozzle corrected by the position coordinate correction unit coincides with the image data.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015105361A JP6439582B2 (en) | 2014-06-04 | 2015-05-25 | Handy mobile printer and its program |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014115595 | 2014-06-04 | ||
| JP2014115595 | 2014-06-04 | ||
| JP2015105361A JP6439582B2 (en) | 2014-06-04 | 2015-05-25 | Handy mobile printer and its program |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016010969A JP2016010969A (en) | 2016-01-21 |
| JP6439582B2 true JP6439582B2 (en) | 2018-12-19 |
Family
ID=55227984
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015105361A Active JP6439582B2 (en) | 2014-06-04 | 2015-05-25 | Handy mobile printer and its program |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6439582B2 (en) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9962927B2 (en) | 2016-03-17 | 2018-05-08 | Ricoh Company, Ltd. | Position detection apparatus, droplet discharging apparatus, method for detecting position, and medium |
| JP6836388B2 (en) * | 2016-03-17 | 2021-03-03 | 株式会社リコー | Position detector, droplet ejection device, program |
| JP2017170720A (en) | 2016-03-23 | 2017-09-28 | カシオ計算機株式会社 | Printing device, printing method and program |
| JP2017217806A (en) * | 2016-06-07 | 2017-12-14 | 株式会社リコー | Device for discharging liquid and liquid discharge method |
| KR102655331B1 (en) * | 2016-11-30 | 2024-04-08 | 주식회사 탑 엔지니어링 | Coating device for monitering the positon and displacement of discharge head and method for controling the same |
| JP6897167B2 (en) * | 2017-03-03 | 2021-06-30 | 株式会社リコー | Droplet ejection device, droplet ejection method, program |
| JP6954026B2 (en) * | 2017-11-14 | 2021-10-27 | 株式会社リコー | Image forming device and image forming method |
| US10596813B2 (en) | 2018-03-14 | 2020-03-24 | Ricoh Company, Ltd. | Liquid discharge apparatus and liquid discharge method |
| CN110877487B (en) * | 2018-09-05 | 2021-07-20 | 株式会社理光 | Image forming apparatus, image forming method, information processing apparatus, and storage medium |
| JP2020040382A (en) * | 2018-09-07 | 2020-03-19 | 株式会社リコー | Image forming device, control method and control program |
| JP7380271B2 (en) | 2020-02-03 | 2023-11-15 | セイコーエプソン株式会社 | Printing devices, programs and printed matter production methods |
| CN113002178A (en) * | 2021-02-23 | 2021-06-22 | 上海汉图科技有限公司 | Method and device for determining printing head coordinates |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA2388626C (en) * | 1999-10-25 | 2008-12-23 | Paul Lapstun | Electronically controllable pen with sensor |
| US8622539B2 (en) * | 2009-11-10 | 2014-01-07 | Ricoh Co., Ltd. | Two-dimensional absolute position sensor and projection control for a handheld printer |
| FR2952450B1 (en) * | 2009-11-12 | 2012-06-08 | Commissariat Energie Atomique | PORTABLE DEVICE AND METHOD FOR PRINTING AN IMAGE, RECORDING MEDIUM, PEN AND TERMINAL FOR THIS DEVICE |
-
2015
- 2015-05-25 JP JP2015105361A patent/JP6439582B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016010969A (en) | 2016-01-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6439582B2 (en) | Handy mobile printer and its program | |
| JP6897167B2 (en) | Droplet ejection device, droplet ejection method, program | |
| US8121809B2 (en) | Apparatus and method for determining the position of a device | |
| JP6409435B2 (en) | Printing apparatus, printing system, and printing method | |
| JP6384262B2 (en) | Printing apparatus, method and program | |
| JP6926535B2 (en) | Droplet ejection device, droplet ejection method, program | |
| US20170291439A1 (en) | Printing device and printing method | |
| US20160339720A1 (en) | Image forming apparatus and image forming method | |
| JP2013060007A (en) | Recording apparatus and control method thereof | |
| JP2016112700A (en) | Hand-held recording device | |
| JP2021073121A (en) | Position detector, droplet ejection device, and program | |
| JP2020040382A (en) | Image forming device, control method and control program | |
| JP2008207355A (en) | Inkjet printer | |
| JP2016000486A (en) | Handy mobile printer, control method of handy mobile printer, and program | |
| JP2018089802A (en) | Printing device | |
| JP6402585B2 (en) | Printing apparatus, method and program | |
| JP2016137621A (en) | Handheld recorder | |
| US11945235B2 (en) | Printing apparatus and control method thereof for adjusting the distance between a printhead and a print medium | |
| JP6844145B2 (en) | Position detection device, droplet ejection device, program, position detection method | |
| JP2017105122A (en) | Liquid discharge device, liquid discharge method, program | |
| JP6582873B2 (en) | Image forming apparatus, program, and method | |
| JP2016179660A (en) | Printing device, printing system and printing method | |
| JP6776521B2 (en) | Image forming equipment, programs and methods | |
| JP2017064975A (en) | Image formation apparatus, position detector, image formation system, and position information switching method of image formation apparatus | |
| JP2011046173A (en) | Image forming apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180214 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181012 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181023 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181105 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6439582 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |