JP6431429B2 - 撮像装置およびその制御方法、プログラム、ならびに記憶媒体 - Google Patents
撮像装置およびその制御方法、プログラム、ならびに記憶媒体 Download PDFInfo
- Publication number
- JP6431429B2 JP6431429B2 JP2015076310A JP2015076310A JP6431429B2 JP 6431429 B2 JP6431429 B2 JP 6431429B2 JP 2015076310 A JP2015076310 A JP 2015076310A JP 2015076310 A JP2015076310 A JP 2015076310A JP 6431429 B2 JP6431429 B2 JP 6431429B2
- Authority
- JP
- Japan
- Prior art keywords
- focus
- subject
- detection
- optical system
- imaging
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N5/00—Details of television systems
- H04N5/14—Picture signal circuitry for video frequency region
- H04N5/144—Movement detection
- H04N5/145—Movement estimation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
- H04N23/675—Focus control based on electronic image sensor signals comprising setting of focusing regions
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/61—Control of cameras or camera modules based on recognised objects
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/61—Control of cameras or camera modules based on recognised objects
- H04N23/611—Control of cameras or camera modules based on recognised objects where the recognised objects include parts of the human body
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
- H04N23/672—Focus control based on electronic image sensor signals based on the phase difference signals
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
- H04N23/673—Focus control based on electronic image sensor signals based on contrast or high frequency components of image signals, e.g. hill climbing method
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/703—SSIS architectures incorporating pixels for producing signals other than image signals
- H04N25/704—Pixels specially adapted for focusing, e.g. phase difference pixel sets
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Studio Devices (AREA)
- Automatic Focus Adjustment (AREA)
- Focusing (AREA)
Description
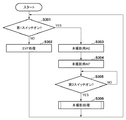
今回の撮影コマにおける顔検出結果が出るまでは、予測した顔位置に最も近い位置の位相差AFの結果が示す合焦位置の方向へフォーカスレンズ101を移動する。その後、今回の撮影コマにおける顔検出結果が出たら、検出された顔位置に最も近い位置の位相差AFの結果が示す合焦位置にフォーカスレンズ101を移動してAF処理を終了する。
被写体移動量が小さいので、予測した顔位置に最も近い位置の位相差AFの結果を最終合焦位置としても、大きくピントを外すことがないと判定できる。そのため、今回の撮影コマにおける顔検出結果が出る前でも、予測した顔位置に最も近い位置の位相差AFの結果が示す合焦位置にフォーカスレンズ101を移動してAF処理を終了する。
今回の撮影コマにおける顔検出結果が出るまでは、予測した顔位置に最も近い位置の位相差AFの結果が示す合焦位置の方向へフォーカスレンズ101を動かす。その後、今回の撮影コマにおける顔検出結果が出たら、検出された顔位置にAF枠を設定してコントラストAFを行う。位相差AFの信頼性が低いので最終的な合焦位置はコントラストAFによって求める。
被写体の移動量が小さいので、信頼性の低い位相差AFの結果を用いると合焦位置とは反対方向にフォーカスレンズ101を動かすおそれがある。従って、今回の撮影コマにおける顔検出結果が出るまではフォーカスレンズ101を動かさず、今回の撮影コマにおける顔検出結果が出たところで、検出された顔位置にAF枠を設定してコントラストAFを行う。
本発明は、上述の実施形態の1以上の機能を実現するプログラムを、ネットワーク又は記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータにおける1つ以上のプロセッサがプログラムを読出し実行する処理でも実現可能である。また、1以上の機能を実現する回路(例えば、ASIC)によっても実現可能である。
Claims (10)
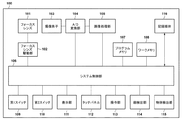
- 撮像素子により撮像された画像から被写体を検出する被写体検出手段と、
前記被写体検出手段により検出された被写体にフォーカスを合わせるように撮像光学系を駆動するフォーカス制御手段と、
撮影準備処理と本撮影処理とを繰り返す連写撮影を行う撮影制御手段と、
前記本撮影処理により得られた画像を用いて前記撮像光学系の合焦位置を検出する焦点検出手段と、
前記被写体検出手段による検出結果に基づいて次回の本撮影処理の際の撮像範囲内における被写体の位置を予測する予測手段と、
前記予測手段により予測された被写体の位置に対して焦点検出領域を設定する設定手段と、
前記設定手段により設定された焦点検出領域に関する信頼性を求める信頼性取得手段と、
前記焦点検出手段により検出された前記撮像光学系の合焦位置から被写体の移動量を求める被写体移動量取得手段と、を有し、
前記フォーカス制御手段は、前記連写撮影における本撮影処理の前に前記被写体検出手段による検出結果が得られるまでは、前記信頼性と前記被写体の移動量とに基づいて前記撮像光学系を駆動する場合に前記焦点検出手段による前回の本撮影処理までの検出結果が示す合焦位置を用いることを特徴とする撮像装置。 - 前記焦点検出手段は、前記撮像素子により撮像された一対の像信号に相関演算を施すことによって合焦位置を算出することを特徴とする請求項1に記載の撮像装置。
- 前記フォーカス制御手段は、前記信頼性が高いと判定し、かつ前記被写体の移動量が大きいと判定した場合は、前記被写体検出手段による検出結果が得られるまでは前記焦点検出手段による前回の本撮影処理までの検出結果が示す合焦位置の方向に前記撮像光学系を駆動し、前記被写体検出手段による検出結果が得られた場合は、今回の本撮影処理での検出結果が示す合焦位置に前記撮像光学系を駆動することを特徴とする請求項1または2に記載の撮像装置。
- 前記フォーカス制御手段は、前記信頼性が高いと判定し、かつ前記被写体の移動量が小さいと判定した場合は、前記焦点検出手段による前回の本撮影処理までの検出結果が示す合焦位置に前記撮像光学系を駆動することを特徴とする請求項1または2に記載の撮像装置。
- 前記焦点検出手段は、前記フォーカス制御手段により前記撮像光学系を移動しながら前記撮像素子により得られる画像の輝度信号の高周波成分が極大になる位置を合焦位置とする第2の焦点検出手段を有し、
前記フォーカス制御手段は、前記信頼性が低いと判定し、かつ前記被写体の移動量が大きいと判定した場合は、前記被写体検出手段による検出結果が得られるまでは前記焦点検出手段による前回の本撮影処理までの検出結果が示す合焦位置の方向に前記撮像光学系を駆動し、前記被写体検出手段による検出結果が得られた場合は、前記第2の焦点検出手段により検出された合焦位置に前記撮像光学系を駆動することを特徴とする請求項1または2に記載の撮像装置。 - 前記焦点検出手段は、前記フォーカス制御手段により前記撮像光学系を移動しながら前記撮像素子により得られる画像の輝度信号の高周波成分が極大になる位置を合焦位置とする第2の焦点検出手段を有し、
前記フォーカス制御手段は、前記信頼性が低いと判定し、かつ前記被写体の移動量が小さいと判定した場合は、前記被写体検出手段による検出結果が得られるまでは前記撮像光学系の駆動は行わず、前記被写体検出手段による検出結果が得られた場合は、前記第2の焦点検出手段により検出された合焦位置に前記撮像光学系を駆動することを特徴とする請求項1または2に記載の撮像装置。 - 前記被写体検出手段は人物の顔を検出することを特徴とする請求項1ないし6のいずれか1項に記載の撮像装置。
- 撮像素子により撮像された画像から被写体を検出する被写体検出手段と、
前記被写体検出手段により検出された被写体にフォーカスを合わせるように撮像光学系を駆動するフォーカス制御手段と、
撮影準備処理と本撮影処理とを繰り返す連写撮影を行う撮影制御手段と、
前記本撮影処理により得られた画像を用いて前記撮像光学系の合焦位置を検出する焦点検出手段と、を有する撮像装置の制御方法であって、
予測手段が、前記被写体検出手段による検出結果に基づいて次回の本撮影処理の際の撮像範囲内における被写体の位置を予測する予測ステップと、
設定手段が、前記予測ステップにより予測された被写体の位置に対して焦点検出領域を設定する設定ステップと、
信頼性取得手段が、前記設定ステップにより設定された焦点検出領域に関する信頼性を求める信頼性取得ステップと、
被写体移動量取得手段が、前記焦点検出手段により検出された前記撮像光学系の合焦位置から被写体の移動量を求める被写体移動量取得ステップと、
前記フォーカス制御手段が、前記連写撮影における本撮影処理の前に前記被写体検出手段による検出結果が得られるまでは、前記信頼性と前記被写体の移動量とに基づいて前記撮像光学系を駆動する場合に前記焦点検出手段による前回の本撮影処理までの検出結果が示す合焦位置を用いるフォーカス制御ステップと、を有することを特徴とする撮像装置の制御方法。 - コンピュータを、請求項1ないし7のいずれか1項に記載された撮像装置の各手段として機能させるためのプログラム。
- コンピュータを、請求項1ないし7のいずれか1項に記載された撮像装置の各手段として機能させるためのプログラムを記憶したコンピュータが読み取り可能な記憶媒体。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015076310A JP6431429B2 (ja) | 2015-04-02 | 2015-04-02 | 撮像装置およびその制御方法、プログラム、ならびに記憶媒体 |
| US15/085,251 US9912858B2 (en) | 2015-04-02 | 2016-03-30 | Image capturing apparatus and control method thereof |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015076310A JP6431429B2 (ja) | 2015-04-02 | 2015-04-02 | 撮像装置およびその制御方法、プログラム、ならびに記憶媒体 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016197150A JP2016197150A (ja) | 2016-11-24 |
| JP2016197150A5 JP2016197150A5 (ja) | 2018-05-10 |
| JP6431429B2 true JP6431429B2 (ja) | 2018-11-28 |
Family
ID=57016470
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015076310A Expired - Fee Related JP6431429B2 (ja) | 2015-04-02 | 2015-04-02 | 撮像装置およびその制御方法、プログラム、ならびに記憶媒体 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9912858B2 (ja) |
| JP (1) | JP6431429B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107257433B (zh) * | 2017-06-16 | 2020-01-17 | Oppo广东移动通信有限公司 | 对焦方法、装置、终端和计算机可读存储介质 |
| CN111246078A (zh) * | 2018-11-29 | 2020-06-05 | 北京小米移动软件有限公司 | 影像处理方法及装置 |
| JP2020112700A (ja) * | 2019-01-11 | 2020-07-27 | キヤノン株式会社 | フォーカス制御装置、撮像装置およびフォーカス制御方法 |
| CN111008606B (zh) * | 2019-12-10 | 2024-04-16 | 上海商汤智能科技有限公司 | 图像预测方法及装置、电子设备和存储介质 |
| JP2024073200A (ja) * | 2022-11-17 | 2024-05-29 | キヤノン株式会社 | フォーカス制御装置、撮像装置およびフォーカス制御方法 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3413904B2 (ja) * | 1993-10-07 | 2003-06-09 | 株式会社ニコン | 自動焦点調節装置 |
| JPH0875999A (ja) * | 1994-09-07 | 1996-03-22 | Nikon Corp | 自動焦点調節装置 |
| US7725018B2 (en) * | 2006-08-01 | 2010-05-25 | Canon Kabushiki Kaisha | Focus control apparatus, image sensing apparatus and focus control method |
| JP5098259B2 (ja) | 2006-09-04 | 2012-12-12 | 株式会社ニコン | カメラ |
| JP5322593B2 (ja) * | 2008-11-10 | 2013-10-23 | キヤノン株式会社 | 焦点調節装置及び方法 |
| JP5361598B2 (ja) * | 2009-07-30 | 2013-12-04 | キヤノン株式会社 | 焦点調節装置及び方法、及び撮像装置 |
| RU2549143C1 (ru) * | 2011-03-17 | 2015-04-20 | Кэнон Кабусики Кайся | Устройство регистрации изображения и способ управления им |
| CN108401114A (zh) * | 2012-05-07 | 2018-08-14 | 株式会社尼康 | 焦点检测装置 |
| JP6335434B2 (ja) * | 2013-04-19 | 2018-05-30 | キヤノン株式会社 | 撮像装置、その制御方法およびプログラム |
| JP6274779B2 (ja) * | 2013-08-21 | 2018-02-07 | キヤノン株式会社 | 焦点調節装置、撮像装置及び焦点調節方法 |
| JP6053652B2 (ja) * | 2013-09-20 | 2016-12-27 | 富士フイルム株式会社 | 撮像装置及び合焦制御方法 |
-
2015
- 2015-04-02 JP JP2015076310A patent/JP6431429B2/ja not_active Expired - Fee Related
-
2016
- 2016-03-30 US US15/085,251 patent/US9912858B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20160295101A1 (en) | 2016-10-06 |
| US9912858B2 (en) | 2018-03-06 |
| JP2016197150A (ja) | 2016-11-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4906893B2 (ja) | 撮像装置及び撮像装置の制御方法 | |
| JP4843002B2 (ja) | 撮像装置、および撮像装置制御方法、並びにコンピュータ・プログラム | |
| JP5709816B2 (ja) | 撮像装置、その制御方法、および制御プログラム、並びに記録媒体 | |
| JP4730478B2 (ja) | 撮像装置、および撮像装置制御方法、並びにプログラム | |
| JP6431429B2 (ja) | 撮像装置およびその制御方法、プログラム、ならびに記憶媒体 | |
| JP6774233B2 (ja) | 焦点検出装置、制御方法およびプログラム | |
| JP2016143022A (ja) | 撮像装置及び撮像方法 | |
| JP2020052400A (ja) | ズーム制御装置およびその制御方法 | |
| JP7158841B2 (ja) | 撮像装置、撮像方法、プログラム、記録媒体および画像処理装置 | |
| JP6140945B2 (ja) | 焦点調節装置及び撮像装置 | |
| CN113572951B (zh) | 焦点调整设备、摄像设备、焦点调整方法和存储介质 | |
| JP5409483B2 (ja) | 撮像装置 | |
| JP2015154409A (ja) | 撮像装置、撮像装置の制御方法、プログラム、および、記憶媒体 | |
| JP7292033B2 (ja) | 情報処理装置、情報処理方法、撮像装置、及びプログラム | |
| JP6590894B2 (ja) | 画像処理装置、撮像装置、画像処理方法およびプログラム | |
| JP2016057463A (ja) | 焦点調節装置及びその制御方法 | |
| JP6768449B2 (ja) | 撮像制御装置、撮像装置の制御方法及びプログラム | |
| KR20120068696A (ko) | 촬상 장치 및 촬상 방법 | |
| KR20120070493A (ko) | 촬상 장치 및 촬상 방법 | |
| JP5225477B2 (ja) | 撮像装置、及びその制御方法 | |
| JP2020101730A (ja) | 撮像装置およびその制御方法 | |
| JP5153912B2 (ja) | 撮像装置及び撮像装置の制御方法 | |
| JP2025181326A (ja) | 制御装置、撮像装置、制御方法およびプログラム | |
| JP2016208396A (ja) | 画像処理装置及びその制御方法、並びにプログラム | |
| JP2025172957A (ja) | 画像処理装置およびその制御方法、撮像装置、プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180320 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180320 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180928 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181005 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181102 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6431429 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |