JP6420938B2 - 低侵襲性治療の誘導及びシミュレーションのためのシステム及び方法 - Google Patents
低侵襲性治療の誘導及びシミュレーションのためのシステム及び方法 Download PDFInfo
- Publication number
- JP6420938B2 JP6420938B2 JP2015561869A JP2015561869A JP6420938B2 JP 6420938 B2 JP6420938 B2 JP 6420938B2 JP 2015561869 A JP2015561869 A JP 2015561869A JP 2015561869 A JP2015561869 A JP 2015561869A JP 6420938 B2 JP6420938 B2 JP 6420938B2
- Authority
- JP
- Japan
- Prior art keywords
- surgical
- image
- path
- medical
- guidance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 130
- 238000011282 treatment Methods 0.000 title description 9
- 238000004088 simulation Methods 0.000 title description 5
- 210000004556 brain Anatomy 0.000 claims description 63
- 238000001356 surgical procedure Methods 0.000 claims description 48
- 238000003384 imaging method Methods 0.000 claims description 40
- 239000003550 marker Substances 0.000 claims description 26
- 238000003860 storage Methods 0.000 claims description 23
- 210000003484 anatomy Anatomy 0.000 claims description 21
- 230000003287 optical effect Effects 0.000 claims description 18
- 238000002591 computed tomography Methods 0.000 claims description 17
- 210000004204 blood vessel Anatomy 0.000 claims description 7
- 230000007246 mechanism Effects 0.000 claims description 7
- 238000004891 communication Methods 0.000 claims description 5
- 239000000835 fiber Substances 0.000 claims description 5
- 239000012530 fluid Substances 0.000 claims description 4
- 210000004126 nerve fiber Anatomy 0.000 claims description 4
- 230000000007 visual effect Effects 0.000 claims description 3
- 230000017531 blood circulation Effects 0.000 claims description 2
- 210000004027 cell Anatomy 0.000 claims description 2
- 230000002490 cerebral effect Effects 0.000 claims description 2
- 230000002596 correlated effect Effects 0.000 claims description 2
- 238000012634 optical imaging Methods 0.000 claims description 2
- 230000006698 induction Effects 0.000 claims 6
- 238000013334 tissue model Methods 0.000 claims 1
- 238000012545 processing Methods 0.000 description 28
- 210000001519 tissue Anatomy 0.000 description 23
- 238000001574 biopsy Methods 0.000 description 22
- 238000002595 magnetic resonance imaging Methods 0.000 description 20
- 230000008569 process Effects 0.000 description 17
- 238000007428 craniotomy Methods 0.000 description 14
- 210000003128 head Anatomy 0.000 description 14
- 206010028980 Neoplasm Diseases 0.000 description 12
- 239000000523 sample Substances 0.000 description 11
- 210000003625 skull Anatomy 0.000 description 10
- 238000011084 recovery Methods 0.000 description 9
- 238000010586 diagram Methods 0.000 description 8
- 230000000638 stimulation Effects 0.000 description 8
- 238000013500 data storage Methods 0.000 description 7
- 230000000875 corresponding effect Effects 0.000 description 5
- 238000002600 positron emission tomography Methods 0.000 description 5
- 238000002271 resection Methods 0.000 description 5
- 238000004458 analytical method Methods 0.000 description 4
- 238000013459 approach Methods 0.000 description 4
- 230000008901 benefit Effects 0.000 description 4
- 238000012790 confirmation Methods 0.000 description 4
- 230000033001 locomotion Effects 0.000 description 4
- 206010018985 Haemorrhage intracranial Diseases 0.000 description 3
- 208000008574 Intracranial Hemorrhages Diseases 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 3
- 210000000988 bone and bone Anatomy 0.000 description 3
- 210000001175 cerebrospinal fluid Anatomy 0.000 description 3
- 210000003109 clavicle Anatomy 0.000 description 3
- 210000001951 dura mater Anatomy 0.000 description 3
- 238000002513 implantation Methods 0.000 description 3
- 238000003780 insertion Methods 0.000 description 3
- 230000037431 insertion Effects 0.000 description 3
- 210000005036 nerve Anatomy 0.000 description 3
- 238000002560 therapeutic procedure Methods 0.000 description 3
- 238000002604 ultrasonography Methods 0.000 description 3
- 208000003174 Brain Neoplasms Diseases 0.000 description 2
- 208000032843 Hemorrhage Diseases 0.000 description 2
- 230000000740 bleeding effect Effects 0.000 description 2
- 210000005013 brain tissue Anatomy 0.000 description 2
- QXJJQWWVWRCVQT-UHFFFAOYSA-K calcium;sodium;phosphate Chemical compound [Na+].[Ca+2].[O-]P([O-])([O-])=O QXJJQWWVWRCVQT-UHFFFAOYSA-K 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 230000009977 dual effect Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000003709 image segmentation Methods 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 238000002360 preparation method Methods 0.000 description 2
- 238000009877 rendering Methods 0.000 description 2
- 238000012285 ultrasound imaging Methods 0.000 description 2
- 238000010200 validation analysis Methods 0.000 description 2
- 241000894006 Bacteria Species 0.000 description 1
- 208000014094 Dystonic disease Diseases 0.000 description 1
- 241001465754 Metazoa Species 0.000 description 1
- 208000018737 Parkinson disease Diseases 0.000 description 1
- 238000001069 Raman spectroscopy Methods 0.000 description 1
- 208000006011 Stroke Diseases 0.000 description 1
- 208000030886 Traumatic Brain injury Diseases 0.000 description 1
- 206010049750 Tumour haemorrhage Diseases 0.000 description 1
- 238000002679 ablation Methods 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 239000013060 biological fluid Substances 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 230000004069 differentiation Effects 0.000 description 1
- 238000009792 diffusion process Methods 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 208000010118 dystonia Diseases 0.000 description 1
- 210000001061 forehead Anatomy 0.000 description 1
- 208000003906 hydrocephalus Diseases 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 239000007943 implant Substances 0.000 description 1
- 230000008676 import Effects 0.000 description 1
- 238000011065 in-situ storage Methods 0.000 description 1
- 229910052500 inorganic mineral Inorganic materials 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 230000002262 irrigation Effects 0.000 description 1
- 238000003973 irrigation Methods 0.000 description 1
- 238000012804 iterative process Methods 0.000 description 1
- 210000003127 knee Anatomy 0.000 description 1
- 230000003902 lesion Effects 0.000 description 1
- 210000003041 ligament Anatomy 0.000 description 1
- 230000004807 localization Effects 0.000 description 1
- 244000005700 microbiome Species 0.000 description 1
- 239000011707 mineral Substances 0.000 description 1
- 238000012978 minimally invasive surgical procedure Methods 0.000 description 1
- 230000000116 mitigating effect Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 210000000537 nasal bone Anatomy 0.000 description 1
- 210000003928 nasal cavity Anatomy 0.000 description 1
- 230000004770 neurodegeneration Effects 0.000 description 1
- 208000015122 neurodegenerative disease Diseases 0.000 description 1
- 230000000771 oncological effect Effects 0.000 description 1
- 230000000399 orthopedic effect Effects 0.000 description 1
- 230000007170 pathology Effects 0.000 description 1
- 238000013442 quality metrics Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 238000010561 standard procedure Methods 0.000 description 1
- 230000009897 systematic effect Effects 0.000 description 1
- 230000009885 systemic effect Effects 0.000 description 1
- 230000008685 targeting Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 230000001131 transforming effect Effects 0.000 description 1
Images




















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
- A61B5/065—Determining position of the probe employing exclusively positioning means located on or in the probe, e.g. using position sensors arranged on the probe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3417—Details of tips or shafts, e.g. grooves, expandable, bendable; Multiple coaxial sliding cannulas, e.g. for dilating
- A61B17/3421—Cannulas
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0033—Features or image-related aspects of imaging apparatus classified in A61B5/00, e.g. for MRI, optical tomography or impedance tomography apparatus; arrangements of imaging apparatus in a room
- A61B5/004—Features or image-related aspects of imaging apparatus classified in A61B5/00, e.g. for MRI, optical tomography or impedance tomography apparatus; arrangements of imaging apparatus in a room adapted for image acquisition of a particular organ or body part
- A61B5/0042—Features or image-related aspects of imaging apparatus classified in A61B5/00, e.g. for MRI, optical tomography or impedance tomography apparatus; arrangements of imaging apparatus in a room adapted for image acquisition of a particular organ or body part for the brain
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0093—Detecting, measuring or recording by applying one single type of energy and measuring its conversion into another type of energy
- A61B5/0095—Detecting, measuring or recording by applying one single type of energy and measuring its conversion into another type of energy by applying light and detecting acoustic waves, i.e. photoacoustic measurements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
- A61B5/055—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves involving electronic [EMR] or nuclear [NMR] magnetic resonance, e.g. magnetic resonance imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/145—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue
- A61B5/14539—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue for measuring pH
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/90—Identification means for patients or instruments, e.g. tags
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/107—Visualisation of planned trajectories or target regions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2051—Electromagnetic tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2051—Electromagnetic tracking systems
- A61B2034/2053—Tracking an applied voltage gradient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2063—Acoustic tracking systems, e.g. using ultrasound
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/10—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis
- A61B2090/103—Cranial plugs for access to brain
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B2090/364—Correlation of different images or relation of image positions in respect to the body
- A61B2090/365—Correlation of different images or relation of image positions in respect to the body augmented reality, i.e. correlating a live optical image with another image
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/373—Surgical systems with images on a monitor during operation using light, e.g. by using optical scanners
- A61B2090/3735—Optical coherence tomography [OCT]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/376—Surgical systems with images on a monitor during operation using X-rays, e.g. fluoroscopy
- A61B2090/3762—Surgical systems with images on a monitor during operation using X-rays, e.g. fluoroscopy using computed tomography systems [CT]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/378—Surgical systems with images on a monitor during operation using ultrasound
- A61B2090/3782—Surgical systems with images on a monitor during operation using ultrasound transmitter or receiver in catheter or minimal invasive instrument
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3983—Reference marker arrangements for use with image guided surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
- A61B90/57—Accessory clamps
- A61B2090/571—Accessory clamps for clamping a support arm to a bed or other supports
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/02—Details of sensors specially adapted for in-vivo measurements
- A61B2562/0247—Pressure sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/02—Details
- A61N1/04—Electrodes
- A61N1/05—Electrodes for implantation or insertion into the body, e.g. heart electrode
- A61N1/0526—Head electrodes
- A61N1/0529—Electrodes for brain stimulation
- A61N1/0534—Electrodes for deep brain stimulation
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Molecular Biology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Physics & Mathematics (AREA)
- Pathology (AREA)
- Biophysics (AREA)
- Radiology & Medical Imaging (AREA)
- High Energy & Nuclear Physics (AREA)
- Neurology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Human Computer Interaction (AREA)
- Robotics (AREA)
- Optics & Photonics (AREA)
- Acoustics & Sound (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
- User Interface Of Digital Computer (AREA)
Description
本特許出願は、2013年3月15日に出願された「PLANNING, NAVIGATION AND SIMULATION SYSTEMS AND METHODS FOR MINIMALLY INVASIVE THERAPY」と題された米国仮特許出願第61/800,155号に対する優先権を主張し、その全内容は、参照により本明細書に組み込まれる。 本願はまた、2014年1月8日に出願された「PLANNING, NAVIGATION AND SIMULATION SYSTEMS AND METHODS FOR MINIMALLY INVASIVE THERAPY」と題された米国仮特許出願第61/924,993号に対する優先権を主張し、その全内容は、参照により本明細書に組み込まれる。 本願はまた、2013年3月15日に出願された「INSERT IMAGING DEVICE」と題された米国仮特許出願第61/801,746号に対する優先権を主張し、その全内容は、参照により本明細書に組み込まれる。 本願はまた、2013年5月1日に出願された「INSERT IMAGING DEVICE」と題された米国仮特許出願第61/818,255号に対する優先権を主張し、その全内容は、参照により本明細書に組み込まれる。 本願はまた、2013年3月15日に出願された「INSERTABLE MAGNETIC RESONANCE IMAGING COIL PROBE FOR MINIMALLY INVASIVE CORRIDOR−BASED PROCEDURES」と題された米国仮特許出願第61/801,143号に対する優先権を主張し、その全内容は、参照により本明細書に組み込まれる。 本願はまた、2013年5月1日に出願された「INSERTABLE MAGNETIC RESONANCE IMAGING COIL PROBE FOR MINIMALLY INVASIVE CORRIDOR−BASED PROCEDURES」と題された米国仮特許出願第61/818,325号に対する優先権を主張し、その全内容は、参照により本明細書に組み込まれる。
本開示は、低侵襲治療及び画像誘導医療処置のための誘導システム及び方法に関する。
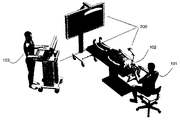
誘導システム200を作動、制御及び支援提供するように存在する。
物理的空間を示し、追跡システム位置合わせ整列を確認する
外部スコープを保持するために使用されるロボットの動きの範囲を示し、
頭の位置決め及び患者の位置決めを案内する。
a)MR及びCT画像上の特徴(自然又は操作)を特定し、追跡システムによって追跡されるポインタ器具を使用してライブシーンにおけるこれらの同じ特徴に向ける。
b)追跡システムによって追跡されるポインタ器具を使用して、患者の顔や額の曲線輪郭上の線をトレースする。この曲線輪郭を3D MR又はCTボリュームに照合する。
c)顔に既知の幾何学的形状の器具を適用する。この器具は、追跡システムによって追跡される能動的又は受動的なターゲットを有する。
d)構造化された光に基づいて表面取得器具を使用する。そして、抽出された表面は、標準的な技術を使用して3D MR又はCTボリュームと照合される。
・撮像された脳溝マップと開頭後の脳(すなわち脳が露出された)の映像を照合することができる、及び/又は、
・血管の画像分割と露出された血管の映像位置を照合することができる、及び/又は、
・腫瘍の画像分割と病変又は腫瘍の映像位置を照合することができる、及び/又は、
・鼻内の位置合わせのために鼻腔の骨表面の骨レンダリングと内視鏡から鼻腔までのビデオ画像を照合することができる。
・脳生検
・機能/脳深部刺激
・カテーテル/シャントの配置
・オープン開頭術
・鼻内/頭蓋骨ベース/ENT
・脊椎処置
に適用することができる。
誘導システムの例示的な実施形態において、(例えば、挿入可能な撮像装置及びその使用方法(INSERTABLE IMAGING DEVICES AND METHODS OF USE THEREOF)と題され、その全体を参照することによって本明細書に組み込まれる2013年3月15日に出願された米国仮特許出願第61/801,746号からの優先権を主張する同時係属の米国特許出願公開第XXXにおいて説明したように)MRI撮像プローブを使用して、術中に取得された局部的なMRI画像によって術前画像(例えば、レンダリングされた3D MRI画像データ)を更新することができる。これは、対応する3Dの術前MRIと位置合わせされた患者の解剖学的部分(これは、ポートベースの手術において脳である)に対するプローブの位置(すなわち、空間的位置及び姿勢)を追跡することによって達成することができる。プローブが(患者の脳などの)解剖学的構造部分を撮像するのに接近すると、プローブは、MRスキャンを作動させる。画像を取得した後、追跡システムによって決定される解剖学的構造部分に対する撮像プローブの空間的位置及び姿勢が術前の3D画像内のスキャンのボリュームの位置を特定するために使用可能である。術中画像は、術前画像に位置合わせされることができる。さらに、術前画像の低解像度又は低品質部分は、ローカライズされた術中画像によって置き換えられてもよい。
Claims (19)
- 医療処置をサポートするシステムであって、
少なくとも1つの医療器具の軌道および視覚表示を制御するように構成された誘導モジュールであって、前記誘導モジュールは、電源、誘導制御ソフトウェアでプログラムされたプロセッサ制御モジュール、および前記プロセッサ制御モジュールに接続された記憶装置で構成され、記憶装置においては、医療処置を受ける解剖学的部分に従う手術経路を画定する手術軌道経路計画を記憶しており、少なくとも1つの医療器具は、それに関連する少なくとも1つの一意的に識別可能な追跡マーカーを含み、そして記憶装置は、前記記憶装置に記憶された前記少なくとも1つの医療機器の仮想表現であって、前記少なくとも1つの関連する固有に識別可能な追跡マーカを備え、前記少なくとも1つの医療機器の前記仮想表現は、前記少なくとも1つの医療器具の体積、大きさ、及び形状に関して幾何学的に正確であり、そして前記記憶装置に記憶された前記手術軌道経路計画からの前記解剖学的部分の関心のある少なくとも1つの組織構造の仮想表現、を収容するように構成される、誘導モジュールと、
前記少なくとも1つの関連する固有に識別可能な追跡マーカを使用して前記少なくとも1つの医療機器を追跡するための前記誘導モジュールと通信する追跡システムと、
使用中の少なくとも1つの医療機器を識別するために、記憶装置に記憶された少なくとも1つの医療機器の幾何学的に正確な仮想表示と、追跡されている少なくとも1つの医療機器とを比較するための命令をプログラムされ、実際の手術経路から手術軌道経路計画によって画定された手術経路に戻る経路を変更し、少なくとも1つの組織構造の仮想表現を関心のある少なくとも1つの組織構造の実際の図と照合させるプロセッサ制御モジュールと、
前記手術軌道経路計画と前記実際の手術経路とによって画定される前記手術経路の重ね合わせと、前記解剖学的部分に登録された前記医療処置を受ける前記解剖学的部分の手術前画像と、 医療処置において使用される1つの医療器具と、前記手術軌道経路計画からの少なくとも1つの組織構造の仮想表現と、少なくとも1つの組織構造の実際の視野との一致した仮想表現と、及び前記経路は実際の手術経路から手術軌道経路計画によって画定される手術経路に戻るように変化する工程と、を表示するための少なくとも1つのディスプレイと、
前記誘導モジュールにおいては、外科医が、前記追跡システムによって追跡される少なくとも1つの医療機器の1つの医療機器を手術経路に沿って平行移動させることを視覚的に支援するための案内機構を備える誘導モジュールと、そして、
前記誘導モジュールであって、術中組織構造を更新するために前記解剖学的部分内の局所化領域の術前画像を更新するために前記局所化領域の術中画像を使用するようにプログラムされる誘導モジュールと、で構成され、
誘導モジュールは、医療処置中に取得された術中画像を、術中画像が解剖学的部分で取得される位置に相関させる位置的に正確なマップを提供するようにプログラムされ、
リアルタイムフィードバックが提供され得る、システム。 - 前記解剖学的部分内に挿入され且つ前記医療処置中に前記解剖学的部分内の局所領域の術中画像を取得するように構成された少なくとも1つの撮像装置でさらに構成され、前記少なくとも1つの撮像装置が、前記追跡システムによって追跡される、関連付けられた少なくとも1つの固有に識別可能な追跡マーカを含むものであり、また前記誘導モジュールが、前記解剖学的部分に対する前記追跡される撮像装置の位置情報に基づいて、前記医療処置中に前記解剖学的部分内の局所領域の術前画像を更新するために前記局所領域の前記術中画像を使用するとの命令によってプログラミングされる、請求項1に記載のシステム。
- 前記術前画像がMRIを使用して取得され、前記撮像装置が前記解剖学的部分内に挿入される挿入可能なMRI装置であり、前記誘導モジュールが、前記挿入可能MRI装置を使用して取得された局所術中MRI画像を使用して前記術前MRI画像の一部を適応的に更新するようにプログラミングされる、請求項2に記載のシステム。
- 前記誘導モジュールが、空間的に相関がある色マップによって前記位置的に正確なマップを表現するようにプログラミングされる、請求項1に記載のシステム。
- 前記誘導モジュールが、絶対的な定量的メトリックが術中に測定される定量的位置合わせを可能とし且つ1つ以上の撮像モダリティを使用して得られた画像を位置合わせするために前記測定された絶対的な定量的メトリックを使用するようにプログラミングされる、請求項2に記載のシステム。
- 前記絶対的な定量的メトリックが、MRI(T1)、MRI(T2)、細胞密度、組織密度、組織の異方性、組織剛性、体積又は面積あたりの流体の流れ、電気伝導度、pH及び圧力のうちの1つを含む、請求項5に記載のシステム。
- 前記誘導モジュールが、前記少なくとも1つの撮像装置によって撮像される組織の生体力学的特性を計算し且つ前記医療処置を受ける前記解剖学的部分の組織モデルを更新するために前記計算された生体力学的特性を使用するように命令によってプログラミングされる、請求項2に記載のシステム。
- 前記誘導モジュールが、前記少なくとも1つの撮像装置によって取得された前記術中画像から組織パターンを分析し且つ前記少なくとも1つの撮像装置によって取得された術中画像と前記術前画像との組織パターンを比較することにより、比較が提供可能であり、前記比較に基づいて前記解剖学的部分の変形された術前モデルを生成するように命令によってプログラミングされる、請求項2に記載のシステム。
- 前記撮像装置が、1つずつの超音波撮像装置、光コヒーレンス断層撮像装置、光音響撮像装置及び光撮像装置で構成される、請求項2に記載のシステム。
- 前記少なくとも1つの撮像装置が組織構造を撮像するために構成されており、前記誘導モジュールが、前記組織構造の前記術前画像を更新するために前記撮像される組織構造の術中画像を使用するように命令によってプログラミングされる、請求項2に記載のシステム。
- 前記医療処置を受ける前記解剖学的部分が患者の脳であり、前記医療処置がポート及び導入器を利用するポートベースの手術であり、前記手術経路が複数セグメントの手術軌道経路計画によって画定された複数セグメントの手術経路である、請求項2に記載のシステム。
- 前記少なくとも1つの撮像装置が、脳の少なくとも1つの組織構造を撮像するために構成され、脳の少なくとも1つの組織構造は脳線維束、脳溝構造、神経線維束及び血管を含む、請求項2に記載のシステム。
- 前記誘導モジュールが、前記術前画像と前記術中画像とを比較し且つ術前画像のデータとリアルタイムの術中画像との相違を検出し、相違の検出により、術前又は術中スキャンボリュームを更新するために少なくとも1つの体積及びCTスキャンを実行するために命令によってプログラミングされ、それにより術前および術中スキャンボリュームのうち少なくとも1つは更新しうる、請求項2に記載のシステム。
- 前記誘導モジュールが、脳溝パターン、血管位置のうち少なくとも1つの組み合わせを照合することによって、及び、弾性率、組織の異方性及び血流を含む定量化可能な一般的なコントラスト機構によって前記術前画像と前記術中画像とを比較して相違を検出するためにプログラミングされる、請求項13に記載のシステム。
- 前記誘導モジュールが、術前画像、術中画像、前記術前画像及び術中画像の重畳、前記術前及び術中画像の双方における前記手術軌道経路計画によって画定された前記手術経路、前記術中画像に基づいて前記誘導モジュールによって計算された実際の手術経路、及び、前記手術軌道経路計画によって画定された前記手術経路及び前記実際の手術経路の重畳を視覚的に表示するようにプログラミングされる、請求項1に記載のシステム。
- 前記誘導モジュールが、前記実際の手術経路から、回避又は接近されるべき前記解剖学的部分の領域に対して前記手術軌道経路計画に関連付けられた基準に一致する手術計画によって画定された前記手術経路に戻る経路変化を計算して表示装置に表示を支持するようにプログラミングされる、請求項15に記載のシステム。
- 患者に対する医療処置をサポートするシステムであって、
少なくとも1つの手術器具の軌跡及び視覚的表示を制御するために構成された誘導モジュールであって、電源、誘導制御ソフトウェアによってプログラミングされたプロセッサ制御モジュール、前記プロセッサ制御モジュールに接続された記憶装置を有する誘導モジュールと、
ここで前記記憶装置は、前記医療処置を受ける解剖学的部分に従う手術経路と、前記医療処置を受けている前記患者の前記解剖学的部分の術前画像とを規定する手術軌道経路計画を記憶しており、少なくとも1つの一意に識別可能な追跡マーカを備えた少なくとも1つの医療器具の仮想表現を格納するように構成された記憶装置とを備え、前記少なくとも1つの医療器具の仮想表現は幾何学的に少なくとも1つの医療機器のサイズおよび形状に関して正確であることと、前記記憶装置に記憶された前記手術軌道経路計画からの少なくとも1つの組織構造の仮想表現と、を収容するように構成され、
前記1つ以上の固有に識別可能な追跡マーカ及び位置合わせされた解剖学的部分に対する関連する仮想表現を使用して空間的位置付けの決定をするために前記システムと通信する追跡カメラと、
前記プロセッサ制御モジュールであって、使用中の少なくとも1つの医療機器を識別し、実際の手術経路から手術経路への経路の変化を計算するために、前記記憶装置に記憶された前記少なくとも1つの医療器具の前記幾何学的に正確な仮想表示と比較するステップと、関心のある少なくとも1つの組織構造の実際の図と少なくとも1つの組織構造の仮想表現をマッチングさせるステップと、を含むプロセッサ制御モジュールと、
前記手術軌道経路計画と前記実際の手術経路とによって画定される前記手術経路と実際の手術経路の重ね合わせと、前記解剖学的部分に登録された前記医療処置を受ける前記解剖学的部分の手術前画像と、医療処置において使用される1つの医療器具と、前記手術軌道経路計画からの少なくとも1つの組織構造の仮想表現と、少なくとも1つの組織構造の実際の視野との一致した仮想表現と、及び前記経路は実際の手術経路から手術軌道経路計画によって画定される手術経路に戻るように変化する工程と、を表示するための少なくとも1つのディスプレイと、
前記解剖学的部分に挿入され且つ前記解剖学的部分内の局所領域の術中画像を取得するように構成された撮像装置であって、前記追跡カメラによって追跡されるそれに関連付けられた少なくとも1つの固有に識別可能な追跡マーカを含む撮像装置と、
前記解剖学的部分に対する追跡される撮像装置の位置情報に基づいて医療処置中に解剖学的部分内の局所領域の術前画像を更新するために前記局所領域の術中画像を使用するとの命令によってプログラミングされる誘導モジュールと、を備え、
誘導モジュールは、医療処置中に取得された術中画像を、術中画像が解剖学的部分で取得される位置に相関させる位置的に正確なマップを提供するようにプログラムされる、システム。 - 前記術前画像がMRIを使用して取得され、前記撮像装置が前記解剖学的部分内に挿入される挿入可能なMRI装置であり、前記誘導モジュールが、前記挿入可能MRI装置を使用して取得された局所術中MRI画像を使用して前記術前MRI画像の一部を適応的に更新するようにプログラミングされる、請求項17に記載のシステム。
- 前記手術軌道経路計画からの少なくとも1つの組織構造が、脳線維束、脳溝構造、神経線維束及び血管のうちの少なくとも1つを含む、請求項1に記載のシステム。
Applications Claiming Priority (13)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361800155P | 2013-03-15 | 2013-03-15 | |
| US201361801746P | 2013-03-15 | 2013-03-15 | |
| US201361801143P | 2013-03-15 | 2013-03-15 | |
| US61/800,155 | 2013-03-15 | ||
| US61/801,143 | 2013-03-15 | ||
| US61/801,746 | 2013-03-15 | ||
| US201361818325P | 2013-05-01 | 2013-05-01 | |
| US201361818255P | 2013-05-01 | 2013-05-01 | |
| US61/818,255 | 2013-05-01 | ||
| US61/818,325 | 2013-05-01 | ||
| US201461924993P | 2014-01-08 | 2014-01-08 | |
| US61/924,993 | 2014-01-08 | ||
| PCT/CA2014/050270 WO2014139022A1 (en) | 2013-03-15 | 2014-03-14 | Systems and methods for navigation and simulation of minimally invasive therapy |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016517287A JP2016517287A (ja) | 2016-06-16 |
| JP2016517287A5 JP2016517287A5 (ja) | 2017-04-13 |
| JP6420938B2 true JP6420938B2 (ja) | 2018-11-07 |
Family
ID=51535739
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015561869A Active JP6420938B2 (ja) | 2013-03-15 | 2014-03-14 | 低侵襲性治療の誘導及びシミュレーションのためのシステム及び方法 |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US10433763B2 (ja) |
| EP (1) | EP2967292A4 (ja) |
| JP (1) | JP6420938B2 (ja) |
| CN (1) | CN105208958B (ja) |
| AU (1) | AU2014231344B2 (ja) |
| CA (2) | CA2906414C (ja) |
| HK (1) | HK1218502A1 (ja) |
| MY (1) | MY177484A (ja) |
| SG (1) | SG11201507612XA (ja) |
| WO (1) | WO2014139022A1 (ja) |
Families Citing this family (92)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108742842B (zh) | 2013-01-16 | 2022-04-19 | 史赛克公司 | 指示视线误差的导航系统和方法 |
| US9993273B2 (en) | 2013-01-16 | 2018-06-12 | Mako Surgical Corp. | Bone plate and tracking device using a bone plate for attaching to a patient's anatomy |
| US9603665B2 (en) | 2013-03-13 | 2017-03-28 | Stryker Corporation | Systems and methods for establishing virtual constraint boundaries |
| US11278353B2 (en) * | 2016-03-16 | 2022-03-22 | Synaptive Medical Inc. | Trajectory alignment system and methods |
| US11622699B2 (en) * | 2013-03-15 | 2023-04-11 | Synaptive Medical Inc. | Trajectory alignment system and methods |
| US9901407B2 (en) * | 2013-08-23 | 2018-02-27 | Stryker European Holdings I, Llc | Computer-implemented technique for determining a coordinate transformation for surgical navigation |
| US10149618B1 (en) | 2014-03-12 | 2018-12-11 | The Board Of Regents Of The University Of Texas System | Subdural electrode localization and visualization using parcellated, manipulable cerebral mesh models |
| US10537393B2 (en) * | 2014-04-04 | 2020-01-21 | Izi Medical Products, Llc | Medical device for surgical navigation system and corresponding method of manufacturing |
| CN106794011B (zh) * | 2014-08-23 | 2020-11-27 | 直观外科手术操作公司 | 用于在图像引导程序中显示病理数据的系统和方法 |
| KR20240044536A (ko) | 2015-02-25 | 2024-04-04 | 마코 서지컬 코포레이션 | 수술절차 중에 추적 방해를 감소시키기 위한 내비게이션 시스템 및 방법 |
| US20180104014A1 (en) * | 2015-03-17 | 2018-04-19 | Brainlab Ag | Surgical drape for patient registration and a registration method utilizing such surgical drape |
| IL238034B (en) * | 2015-03-30 | 2018-05-31 | Shmri Haim Ltd | System and manual tracker for real-time non-invasive tissue analysis |
| KR102371053B1 (ko) * | 2015-06-04 | 2022-03-10 | 큐렉소 주식회사 | 수술로봇 시스템 |
| US10433728B2 (en) * | 2015-06-19 | 2019-10-08 | Synaptive Medical (Barbados) Inc. | Medical imaging system for determining a scan orientation |
| US11119171B2 (en) | 2015-07-16 | 2021-09-14 | Synaptive Medical Inc. | Systems and methods for adaptive multi-resolution magnetic resonance imaging |
| US10973587B2 (en) * | 2015-08-19 | 2021-04-13 | Brainlab Ag | Reference array holder |
| WO2017044874A1 (en) * | 2015-09-10 | 2017-03-16 | Intuitive Surgical Operations, Inc. | Systems and methods for using tracking in image-guided medical procedure |
| CA2999804C (en) | 2015-10-06 | 2024-03-26 | Synaptive Medical (Barbados) Inc. | Method, system and apparatus for image-guided insertion of implant devices |
| US10058393B2 (en) | 2015-10-21 | 2018-08-28 | P Tech, Llc | Systems and methods for navigation and visualization |
| US11141859B2 (en) * | 2015-11-02 | 2021-10-12 | Brainlab Ag | Determining a configuration of a medical robotic arm |
| WO2017114855A1 (en) * | 2015-12-29 | 2017-07-06 | Koninklijke Philips N.V. | System, control unit and method for control of a surgical robot |
| AU2016380277B2 (en) | 2015-12-31 | 2021-12-16 | Stryker Corporation | System and methods for performing surgery on a patient at a target site defined by a virtual object |
| US11141227B2 (en) * | 2016-01-11 | 2021-10-12 | Mazor Robotics Ltd. | Surgical robotic system |
| US10537395B2 (en) | 2016-05-26 | 2020-01-21 | MAKO Surgical Group | Navigation tracker with kinematic connector assembly |
| GB2566663B (en) * | 2016-06-27 | 2022-02-23 | Synaptive Medical Inc | Intraoperative medical imaging method and system |
| EP4374768A3 (en) * | 2016-06-30 | 2024-08-07 | Intuitive Surgical Operations, Inc. | Graphical user interface for displaying guidance information in a plurality of modes during an image-guided procedure |
| GB2570055B (en) * | 2016-07-22 | 2021-07-21 | Synaptive Medical Inc | Method for multimodal tissue imaging based on resonance Raman effect on metal based MRI contrast agents and method for ionizing laser plumes |
| US10321913B2 (en) * | 2016-08-04 | 2019-06-18 | Biosense Webster (Israel) Ltd. | Balloon positioning in a sinuplasty procedure |
| WO2018027793A1 (zh) * | 2016-08-11 | 2018-02-15 | 中国科学院深圳先进技术研究院 | 一种开颅手术中可视化脑功能结构定位方法及系统 |
| GB2568426B (en) * | 2016-08-17 | 2021-12-15 | Synaptive Medical Inc | Methods and systems for registration of virtual space with real space in an augmented reality system |
| CA3035522A1 (en) * | 2016-08-30 | 2018-03-08 | The Regents Of The University Of California | Methods for biomedical targeting and delivery and devices and systems for practicing the same |
| US10631933B2 (en) * | 2016-08-31 | 2020-04-28 | Covidien Lp | Pathway planning for use with a navigation planning and procedure system |
| JP7112754B2 (ja) * | 2016-09-04 | 2022-08-04 | ウニヴェルズィテート ベルン | 重要な解剖学的特徴に対する外科用器具の接近度を決定するためのシステム |
| US11986252B2 (en) * | 2017-08-10 | 2024-05-21 | Biosense Webster (Israel) Ltd. | ENT image registration |
| CN110248618B (zh) * | 2016-09-09 | 2024-01-09 | 莫比乌斯成像公司 | 用于在计算机辅助手术中显示患者数据的方法及系统 |
| US10993771B2 (en) * | 2016-09-12 | 2021-05-04 | Synaptive Medical Inc. | Trackable apparatuses and methods |
| WO2018060304A1 (en) * | 2016-09-30 | 2018-04-05 | Koninklijke Philips N.V. | Anatomical model for position planning and tool guidance of a medical tool |
| US10631935B2 (en) * | 2016-10-25 | 2020-04-28 | Biosense Webster (Israel) Ltd. | Head registration using a personalized gripper |
| CA3042091A1 (en) * | 2016-10-31 | 2018-05-03 | Synaptive Medical (Barbados) Inc. | 3d navigation system and methods |
| CN106600545B (zh) * | 2016-11-11 | 2020-09-11 | 韩晓东 | 一种基于物联网的超声骨科手术控制方法及控制系统 |
| WO2018102904A1 (en) * | 2016-12-08 | 2018-06-14 | Synaptive Medical (Barbados) Inc. | Optical-based input for medical devices |
| CN106691383A (zh) * | 2016-12-27 | 2017-05-24 | 天津恒宇医疗科技有限公司 | 一种高通过性oct成像导管 |
| EP3595517A4 (en) | 2017-03-13 | 2020-12-23 | Intuitive Surgical Operations Inc. | SYSTEMS AND METHODS FOR MEDICAL PROCEDURES USING OPTICAL COHERENCE TOMOGRAPHIC ACQUISITION |
| US10314658B2 (en) * | 2017-04-21 | 2019-06-11 | Biosense Webster (Israel) Ltd. | Registration of an anatomical image with a position-tracking coordinate system based on visual proximity to bone tissue |
| WO2018200801A1 (en) | 2017-04-27 | 2018-11-01 | Bendok Bernard R | 3d tracking-assisted functional brain region mapping |
| US11033341B2 (en) | 2017-05-10 | 2021-06-15 | Mako Surgical Corp. | Robotic spine surgery system and methods |
| EP3621545B1 (en) | 2017-05-10 | 2024-02-21 | MAKO Surgical Corp. | Robotic spine surgery system |
| US10485615B2 (en) * | 2017-06-30 | 2019-11-26 | Synaptive Medical (Barbados) Inc. | Medical electronic device with multi-tracking cameras |
| US10918444B2 (en) | 2017-08-11 | 2021-02-16 | Brainlab Ag | Video based patient registration and tracking |
| WO2019048269A1 (en) * | 2017-09-05 | 2019-03-14 | Koninklijke Philips N.V. | GUIDING SYSTEM FOR VENOUS PUNCTION AND ARTERIAL LINE WITH INCREASED REALITY |
| KR101995900B1 (ko) * | 2017-09-11 | 2019-07-04 | 뉴로핏 주식회사 | 3차원 뇌지도 생성 방법 및 프로그램 |
| CN109620407B (zh) * | 2017-10-06 | 2024-02-06 | 皇家飞利浦有限公司 | 治疗轨迹引导系统 |
| EP3470110A1 (en) * | 2017-10-11 | 2019-04-17 | Université de Rennes 1 | Proficiency assessment system and method for deep brain stimulation (dbs) |
| FR3073135B1 (fr) * | 2017-11-09 | 2019-11-15 | Quantum Surgical | Dispositif robotise pour une intervention medicale mini-invasive sur des tissus mous |
| CN107898499B (zh) * | 2017-12-06 | 2021-08-03 | 上海卓昕医疗科技有限公司 | 骨科三维区域定位系统及方法 |
| CN107970060A (zh) * | 2018-01-11 | 2018-05-01 | 上海联影医疗科技有限公司 | 手术机器人系统及其控制方法 |
| US11547481B2 (en) * | 2018-01-11 | 2023-01-10 | Covidien Lp | Systems and methods for laparoscopic planning and navigation |
| US11123139B2 (en) * | 2018-02-14 | 2021-09-21 | Epica International, Inc. | Method for determination of surgical procedure access |
| FR3078624B1 (fr) * | 2018-03-06 | 2022-06-17 | Amplitude | Systeme et procede d’assistance en realite augmentee au positionnement d’une instrumentation chirurgicale specifique a un patient |
| US10736699B2 (en) * | 2018-04-27 | 2020-08-11 | Medtronic Navigation, Inc. | System and method for a tracked procedure |
| CN108852496A (zh) * | 2018-05-15 | 2018-11-23 | 杭州三坛医疗科技有限公司 | 导向通道和导向通道的姿态显示系统 |
| US11918423B2 (en) | 2018-10-30 | 2024-03-05 | Corindus, Inc. | System and method for navigating a device through a path to a target location |
| US11602402B2 (en) | 2018-12-04 | 2023-03-14 | Globus Medical, Inc. | Drill guide fixtures, cranial insertion fixtures, and related methods and robotic systems |
| US11744655B2 (en) | 2018-12-04 | 2023-09-05 | Globus Medical, Inc. | Drill guide fixtures, cranial insertion fixtures, and related methods and robotic systems |
| US11481909B2 (en) * | 2018-12-06 | 2022-10-25 | Biosense Webster (Israel) Ltd. | Method and apparatus for performing facial registration |
| US11514576B2 (en) * | 2018-12-14 | 2022-11-29 | Acclarent, Inc. | Surgical system with combination of sensor-based navigation and endoscopy |
| CN113397706A (zh) * | 2018-12-29 | 2021-09-17 | 华科精准(北京)医疗科技有限公司 | 一种手术导航系统 |
| IT201900000583A1 (it) * | 2019-01-14 | 2020-07-14 | Upsurgeon S R L | Dispositivo di apprendimento medico basato sull'integrazione di realtà fisica e virtuale finalizzato allo studio e alla simulazione degli approcci chirurgici ai distretti anatomici |
| US11744643B2 (en) | 2019-02-04 | 2023-09-05 | Covidien Lp | Systems and methods facilitating pre-operative prediction of post-operative tissue function |
| US11382549B2 (en) | 2019-03-22 | 2022-07-12 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, and related methods and devices |
| CN109893226A (zh) * | 2019-03-25 | 2019-06-18 | 北京万特福医疗器械有限公司 | 一种颅内血肿增强现实定位系统 |
| US11045179B2 (en) | 2019-05-20 | 2021-06-29 | Global Medical Inc | Robot-mounted retractor system |
| US12059804B2 (en) | 2019-05-22 | 2024-08-13 | Mako Surgical Corp. | Bidirectional kinematic mount |
| CN110448801A (zh) * | 2019-08-16 | 2019-11-15 | 昆明医科大学第一附属医院 | 一种帕金森治疗系统和方法 |
| WO2021119280A1 (en) * | 2019-12-10 | 2021-06-17 | Mediview Xr, Inc. | System and methods for planning and performing three-dimensional holographic interventional procedures |
| CN110974299A (zh) * | 2019-12-31 | 2020-04-10 | 上海杏脉信息科技有限公司 | 超声扫查机器人系统、超声扫查方法及介质 |
| CN114929144A (zh) | 2020-01-09 | 2022-08-19 | 佳能美国公司 | 利用弯曲仪器路径的增强型规划和可视化及其弯曲仪器 |
| CN111407406B (zh) * | 2020-03-31 | 2022-04-26 | 武汉联影智融医疗科技有限公司 | 头部位置标识系统、术中控制系统及控制方法 |
| CN112807083A (zh) * | 2020-06-01 | 2021-05-18 | 上海库欣医疗科技有限公司 | 用于神经外科导航的颅脑穿刺路径建立方法和系统 |
| CN111728695B (zh) * | 2020-06-12 | 2023-07-25 | 天津理工大学 | 一种用于开颅手术的光束辅助定位系统 |
| DE102020208325A1 (de) * | 2020-07-02 | 2022-01-05 | Siemens Healthcare Gmbh | Verfahren und System zur Erstellung eines Navigationsplans für einen Katheter mit Roboter |
| WO2022011538A1 (en) * | 2020-07-14 | 2022-01-20 | Covidien Lp | Systems and methods for positioning access ports |
| CN112168345B (zh) * | 2020-09-07 | 2022-03-01 | 武汉联影智融医疗科技有限公司 | 手术机器人仿真系统 |
| DE102020126029A1 (de) | 2020-10-05 | 2022-04-07 | B. Braun New Ventures GmbH | Chirurgisches Assistenzsystem und Darstellungsverfahren |
| CN113133829B (zh) * | 2021-04-01 | 2022-11-01 | 上海复拓知达医疗科技有限公司 | 一种手术导航系统、方法、电子设备和可读存储介质 |
| CN113100934A (zh) * | 2021-04-06 | 2021-07-13 | 德智鸿(上海)机器人有限责任公司 | 手术辅助方法、装置、计算机设备和存储介质 |
| CN115686725A (zh) * | 2021-06-24 | 2023-02-03 | 武汉联影智融医疗科技有限公司 | 术前规划的显示方法、装置、计算机设备和存储介质 |
| CN114224486B (zh) * | 2021-12-15 | 2024-07-23 | 中国医学科学院生物医学工程研究所 | 一种用于声场和磁场正交定位的神经导航定位系统 |
| US20230241775A1 (en) * | 2022-02-02 | 2023-08-03 | Mazor Robotics, Ltd. | Robotic arm guide as a depth stop |
| CN116269155B (zh) * | 2023-03-22 | 2024-03-22 | 新光维医疗科技(苏州)股份有限公司 | 图像诊断方法、图像诊断装置、及图像诊断程序 |
| CN116138715B (zh) * | 2023-04-13 | 2023-06-23 | 南京诺源医疗器械有限公司 | 一种可调荧光摄像角度的体内腔镜系统 |
| CN117179738B (zh) * | 2023-11-08 | 2024-02-06 | 安徽福晴医疗装备有限公司 | 一种血管介入磁共振成像方法及系统 |
Family Cites Families (72)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ES2085885T3 (es) | 1989-11-08 | 1996-06-16 | George S Allen | Brazo mecanico para sistema interactivo de cirugia dirigido por imagenes. |
| US6675040B1 (en) | 1991-01-28 | 2004-01-06 | Sherwood Services Ag | Optical object tracking system |
| US5279309A (en) | 1991-06-13 | 1994-01-18 | International Business Machines Corporation | Signaling device and method for monitoring positions in a surgical operation |
| US5531742A (en) * | 1992-01-15 | 1996-07-02 | Barken; Israel | Apparatus and method for computer controlled cryosurgery |
| US5631973A (en) | 1994-05-05 | 1997-05-20 | Sri International | Method for telemanipulation with telepresence |
| US5657429A (en) | 1992-08-10 | 1997-08-12 | Computer Motion, Inc. | Automated endoscope system optimal positioning |
| US5524180A (en) | 1992-08-10 | 1996-06-04 | Computer Motion, Inc. | Automated endoscope system for optimal positioning |
| US5913820A (en) | 1992-08-14 | 1999-06-22 | British Telecommunications Public Limited Company | Position location system |
| GB9405299D0 (en) | 1994-03-17 | 1994-04-27 | Roke Manor Research | Improvements in or relating to video-based systems for computer assisted surgery and localisation |
| US6167296A (en) * | 1996-06-28 | 2000-12-26 | The Board Of Trustees Of The Leland Stanford Junior University | Method for volumetric image navigation |
| DE69819289T2 (de) | 1997-06-23 | 2004-08-05 | Philips Intellectual Property & Standards Gmbh | Bildgeführtes chirurgisches system |
| US6468265B1 (en) | 1998-11-20 | 2002-10-22 | Intuitive Surgical, Inc. | Performing cardiac surgery without cardioplegia |
| US6671538B1 (en) * | 1999-11-26 | 2003-12-30 | Koninklijke Philips Electronics, N.V. | Interface system for use with imaging devices to facilitate visualization of image-guided interventional procedure planning |
| JP4472085B2 (ja) * | 2000-01-26 | 2010-06-02 | オリンパス株式会社 | 手術用ナビゲーションシステム |
| WO2002061371A1 (en) | 2001-01-30 | 2002-08-08 | Z-Kat, Inc. | Tool calibrator and tracker system |
| US6919867B2 (en) | 2001-03-29 | 2005-07-19 | Siemens Corporate Research, Inc. | Method and apparatus for augmented reality visualization |
| US7607440B2 (en) | 2001-06-07 | 2009-10-27 | Intuitive Surgical, Inc. | Methods and apparatus for surgical planning |
| WO2003032837A1 (en) | 2001-10-12 | 2003-04-24 | University Of Florida | Computer controlled guidance of a biopsy needle |
| US6663559B2 (en) | 2001-12-14 | 2003-12-16 | Endactive, Inc. | Interface for a variable direction of view endoscope |
| EP1550024A2 (en) * | 2002-06-21 | 2005-07-06 | Cedara Software Corp. | Computer assisted system and method for minimal invasive hip, uni knee and total knee replacement |
| EP2070487B1 (en) | 2002-08-13 | 2014-03-05 | NeuroArm Surgical, Ltd. | Microsurgical robot system |
| US8355773B2 (en) | 2003-01-21 | 2013-01-15 | Aesculap Ag | Recording localization device tool positional parameters |
| JP2004223128A (ja) | 2003-01-27 | 2004-08-12 | Hitachi Ltd | 医療行為支援装置および方法 |
| JP2007512854A (ja) | 2003-04-28 | 2007-05-24 | ブラッコ イメージング ソチエタ ペル アチオニ | 手術用ナビゲーションシステム(カメラプローブ) |
| US7097357B2 (en) | 2004-06-02 | 2006-08-29 | General Electric Company | Method and system for improved correction of registration error in a fluoroscopic image |
| US8211094B2 (en) * | 2004-10-26 | 2012-07-03 | Brainlab Ag | Pre-calibrated reusable instrument |
| US9770261B2 (en) | 2004-10-28 | 2017-09-26 | Nico Corporation | Surgical access assembly and method of using same |
| US9387010B2 (en) | 2004-10-28 | 2016-07-12 | Nico Corporation | Surgical access assembly and method of using same |
| US8398541B2 (en) | 2006-06-06 | 2013-03-19 | Intuitive Surgical Operations, Inc. | Interactive user interfaces for robotic minimally invasive surgical systems |
| US20060287583A1 (en) * | 2005-06-17 | 2006-12-21 | Pool Cover Corporation | Surgical access instruments for use with delicate tissues |
| US7840256B2 (en) | 2005-06-27 | 2010-11-23 | Biomet Manufacturing Corporation | Image guided tracking array and method |
| JP4836122B2 (ja) | 2006-02-09 | 2011-12-14 | 国立大学法人浜松医科大学 | 手術支援装置、方法及びプログラム |
| US20070238981A1 (en) | 2006-03-13 | 2007-10-11 | Bracco Imaging Spa | Methods and apparatuses for recording and reviewing surgical navigation processes |
| US8060181B2 (en) | 2006-04-07 | 2011-11-15 | Brainlab Ag | Risk assessment for planned trajectories |
| US8112292B2 (en) | 2006-04-21 | 2012-02-07 | Medtronic Navigation, Inc. | Method and apparatus for optimizing a therapy |
| WO2007128377A1 (en) | 2006-05-04 | 2007-11-15 | Nassir Navab | Virtual penetrating mirror device for visualizing virtual objects in endoscopic applications |
| US8160676B2 (en) * | 2006-09-08 | 2012-04-17 | Medtronic, Inc. | Method for planning a surgical procedure |
| DE502006007177D1 (de) * | 2006-09-15 | 2010-07-22 | Brainlab Ag | Vorrichtung und Verfahren zum Messen geometrischer Eigenschaften medizintechnischer Behandlungsvorrichtungen, insbesondere zur automatischen Verifikation, Kalibrierung und Vermessung von Instrumenten für computerassistierte Chirurgie |
| US8116847B2 (en) | 2006-10-19 | 2012-02-14 | Stryker Corporation | System and method for determining an optimal surgical trajectory |
| US7892165B2 (en) | 2006-10-23 | 2011-02-22 | Hoya Corporation | Camera calibration for endoscope navigation system |
| DE102006061178A1 (de) | 2006-12-22 | 2008-06-26 | Siemens Ag | System zur Durchführung und Überwachung minimal-invasiver Eingriffe |
| WO2008093517A1 (ja) | 2007-01-31 | 2008-08-07 | National University Corporation Hamamatsu University School Of Medicine | 手術支援情報表示装置、手術支援情報表示方法及び手術支援情報表示プログラム |
| EP1952779B1 (de) * | 2007-02-01 | 2012-04-04 | BrainLAB AG | Medizintechnische Instrumenten-Identifizierung |
| US8233963B2 (en) * | 2007-02-19 | 2012-07-31 | Medtronic Navigation, Inc. | Automatic identification of tracked surgical devices using an electromagnetic localization system |
| WO2008109346A1 (en) | 2007-03-05 | 2008-09-12 | University Of Pittsburgh - Of The Commonwealth System Of Higher Education | Combining tomographic images in situ with direct vision in sterile environments |
| WO2008115511A1 (en) | 2007-03-20 | 2008-09-25 | Peak Biosciences, Inc. | Method for therapeutic administration of radionucleosides |
| EP2143071B1 (en) | 2007-04-26 | 2014-02-26 | Koninklijke Philips N.V. | Risk indication for surgical procedures |
| US20090003528A1 (en) | 2007-06-19 | 2009-01-01 | Sankaralingam Ramraj | Target location by tracking of imaging device |
| DE102007029364A1 (de) | 2007-06-26 | 2009-01-02 | Siemens Ag | Verfahren zum Bestimmen eines Zugangs zu einem Areal von einem Gehirn |
| WO2009045827A2 (en) | 2007-09-30 | 2009-04-09 | Intuitive Surgical, Inc. | Methods and systems for tool locating and tool tracking robotic instruments in robotic surgical systems |
| WO2009116663A1 (ja) * | 2008-03-21 | 2009-09-24 | Takahashi Atsushi | 三次元デジタル拡大鏡手術支援システム |
| US20090326336A1 (en) | 2008-06-25 | 2009-12-31 | Heinz Ulrich Lemke | Process for comprehensive surgical assist system by means of a therapy imaging and model management system (TIMMS) |
| US20110015267A1 (en) * | 2009-07-20 | 2011-01-20 | Deanna Jean Nelson | Methods for the preparation and use of aqueous solutions of magnesium valproate hydrate and l-carnitine |
| GB2472066A (en) | 2009-07-23 | 2011-01-26 | Medi Maton Ltd | Device for manipulating and tracking a guide tube with radiopaque markers |
| EP2461745A2 (en) * | 2009-08-05 | 2012-06-13 | University Of South Florida | Method of rapidly visualizing essential neural pathways |
| WO2011020505A1 (en) | 2009-08-20 | 2011-02-24 | Brainlab Ag | Integrated surgical device combining instrument; tracking system and navigation system |
| EP2491337A4 (en) * | 2009-10-20 | 2017-03-22 | Imris Inc. | Imaging system using markers |
| US8694075B2 (en) | 2009-12-21 | 2014-04-08 | General Electric Company | Intra-operative registration for navigated surgical procedures |
| DE102010029275A1 (de) | 2010-05-25 | 2011-12-01 | Siemens Aktiengesellschaft | Verfahren zum Bewegen eines Instrumentenarms eines Laparoskopierobotors in einer vorgebbare Relativlage zu einem Trokar |
| WO2012007036A1 (en) | 2010-07-14 | 2012-01-19 | Brainlab Ag | Method and system for determining an imaging direction and calibration of an imaging apparatus |
| JP5615080B2 (ja) * | 2010-07-22 | 2014-10-29 | キヤノン株式会社 | 画像形成装置 |
| US8657809B2 (en) * | 2010-09-29 | 2014-02-25 | Stryker Leibinger Gmbh & Co., Kg | Surgical navigation system |
| US9913596B2 (en) | 2010-11-25 | 2018-03-13 | Invivo Corporation | Systems and methods for MRI guided trans-orifice and transperineal intervention apparatus with adjustable biopsy needle insertion |
| WO2012092511A2 (en) | 2010-12-29 | 2012-07-05 | The Ohio State University | Automated trajectory planning for stereotactic procedures |
| BR112013017901A2 (pt) | 2011-01-17 | 2016-10-11 | Koninkl Philips Electronics Nv | sistema para detecção de dispositivo médico, sistema de biopsia para detecção de dispositivo médico e método para detecção de dispositivo médico |
| DE102011005917A1 (de) | 2011-03-22 | 2012-09-27 | Kuka Laboratories Gmbh | Medizinischer Arbeitsplatz |
| WO2013056036A1 (en) * | 2011-10-14 | 2013-04-18 | Conformis, Inc. | Methods and systems for identification, assessment, modeling, and repair of anatomical disparities in joint replacement |
| DE102011087357B4 (de) | 2011-11-29 | 2021-09-16 | Karl Storz Se & Co. Kg | Aktualisierung von präoperativ aufgenommenen 3D-Bilddaten eines Körpers |
| US9295449B2 (en) | 2012-01-23 | 2016-03-29 | Ultrasonix Medical Corporation | Landmarks for ultrasound imaging |
| WO2013141974A1 (en) | 2012-02-08 | 2013-09-26 | Convergent Life Sciences, Inc. | System and method for using medical image fusion |
| US9125556B2 (en) | 2012-05-14 | 2015-09-08 | Mazor Robotics Ltd. | Robotic guided endoscope |
| US10022520B2 (en) | 2012-12-17 | 2018-07-17 | Nico Corporation | Surgical access system |
-
2014
- 2014-03-14 CN CN201480015324.0A patent/CN105208958B/zh active Active
- 2014-03-14 WO PCT/CA2014/050270 patent/WO2014139022A1/en active Application Filing
- 2014-03-14 EP EP14762880.4A patent/EP2967292A4/en not_active Ceased
- 2014-03-14 CA CA2906414A patent/CA2906414C/en active Active
- 2014-03-14 US US14/655,814 patent/US10433763B2/en active Active
- 2014-03-14 CA CA2929702A patent/CA2929702C/en active Active
- 2014-03-14 MY MYPI2015703223A patent/MY177484A/en unknown
- 2014-03-14 AU AU2014231344A patent/AU2014231344B2/en active Active
- 2014-03-14 SG SG11201507612XA patent/SG11201507612XA/en unknown
- 2014-03-14 JP JP2015561869A patent/JP6420938B2/ja active Active
-
2016
- 2016-06-07 HK HK16106503.9A patent/HK1218502A1/zh not_active IP Right Cessation
Also Published As
| Publication number | Publication date |
|---|---|
| US20150351860A1 (en) | 2015-12-10 |
| AU2014231344B2 (en) | 2018-10-04 |
| AU2014231344A1 (en) | 2015-11-05 |
| CA2906414A1 (en) | 2014-09-18 |
| EP2967292A1 (en) | 2016-01-20 |
| CA2906414C (en) | 2016-07-26 |
| MY177484A (en) | 2020-09-16 |
| SG11201507612XA (en) | 2015-10-29 |
| JP2016517287A (ja) | 2016-06-16 |
| CA2929702A1 (en) | 2014-09-18 |
| US10433763B2 (en) | 2019-10-08 |
| CN105208958B (zh) | 2018-02-02 |
| EP2967292A4 (en) | 2017-03-01 |
| CN105208958A (zh) | 2015-12-30 |
| CA2929702C (en) | 2023-03-07 |
| HK1218502A1 (zh) | 2017-02-24 |
| WO2014139022A1 (en) | 2014-09-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6420938B2 (ja) | 低侵襲性治療の誘導及びシミュレーションのためのシステム及び方法 | |
| US11931140B2 (en) | Systems and methods for navigation and simulation of minimally invasive therapy | |
| NL2018529B1 (en) | Trajectory alignment system and methods | |
| US10413366B2 (en) | Trajectory guidance alignment system and methods | |
| US10166078B2 (en) | System and method for mapping navigation space to patient space in a medical procedure | |
| CA2964488C (en) | Calibration apparatus for a medical tool | |
| US11191595B2 (en) | Method for recovering patient registration | |
| WO2012085511A1 (en) | Method and apparatus for analysing images | |
| US11622699B2 (en) | Trajectory alignment system and methods | |
| US20170165005A1 (en) | Port tracking tool | |
| WO2017190210A1 (en) | Methods for improving patient registration | |
| CA2927381C (en) | Trajectory alignment system and methods |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170308 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170308 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180131 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180305 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180605 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180622 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180915 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180927 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181013 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6420938 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |