以下、本発明の一実施例を図面を参照しつつ詳細に説明する。
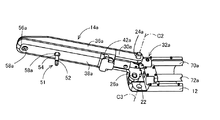
図1乃至図3において、結び目形成装置10は、円筒状の長手基材12と、長手基材12の先端部において開閉可能に設けられた一対の第1アーム機構14aおよび第2アーム機構14bと、長手基材12の基端部において長手基材12の軸心線C1まわりに回転操作可能に設けられた操作部材16と、長手基材12内に設けられ、操作部材16の回転操作力を一対の第1アーム機構14aおよび第2アーム機構14bに伝達してそれら一対の第1アーム機構14aおよび第2アーム機構14bを動作させる操作力伝達機構18とを備えている。なお、図3に示すように、長手基材12は、一対の半円断面の部分円筒部材12aおよび12bが組合せ状態で固定されることによって円筒状に構成されている。本実施例では、長手基材12がベース部として機能し、操作部材16が操作部として機能している。なお、一対の第1アーム機構14aおよび第2アーム機構14bは後述のようにループ形成手段として機能するものである。また、図1から図11では、被結紮体として機能する糸状部材Lが省略して示されている。
長手基材12の先端部には、第1アーム機構14aおよび第2アーム機構14bの開閉面に直交する軸心線C2上に所定間隔を隔てて1対の支持穴22aと、軸心線C2と平行な軸心線C3上にそれぞれ位置する1対の支持穴22bが形成されており、第1アーム機構14aは1対の支持穴22aによって軸心線C2まわりに回動可能に支持され、第2アーム機構14bは1対の支持穴22bによって軸心線C3まわりに回動可能に支持されている。一対の第1アーム機構14aおよび第2アーム機構14bは、互いに同様に構成されているので、第1アーム機構14aについては末尾にaが付された数字符号を用いて説明し、第2アーム機構14bについては末尾にbが付された同じ数字符号を付して説明を省略する。
第1アーム機構14aの開位置を示す図1および図4、および第1アーム機構14aの閉位置を示す図2および図5に示すように、第1アーム機構14aは、一対の支持穴22aに嵌め入れられた一対の突軸24aと開閉連結アーム26aとを一体的に有し、その一対の支持穴22により一対の支持穴22の中心を通る軸心線C2まわりの回動可能に支持されている。また、第1アーム機構14aは、軸心線C2に直交する方向に貫通する貫通穴28aが形成されたアーム基台30aと、その貫通穴28aに嵌合されたユニバーサルジョイント32aと連結された連結軸34aとを備えている。更に、第1アーム機構14aは、アーム本体36a、ガイドカバー38a、ロックプレート40a、T字状のバー支持部42a、長手状のロック操作バー46aを備えている。アーム本体36aは、軸心線C2まわりに回動し且つ上記ユニバーサルジョイント32aと共に貫通穴28aの回転軸線C4まわりに回転可能にアーム基台30aに設けられている。ガイドカバー38aは、アーム本体36aにその第2アーム機構14b側の対向面全体を覆うように且つその対向面に対して僅かな隙間を隔てて固定されている。ロックプレート40aは、ガイドカバー38aとアーム本体36aの対向面との間に長手方向に移動可能に収容されている。T字状のバー支持部42aは、ガイドカバー38aの基端側にアーム本体36aの幅方向寸法よりも小幅に且つ第2アーム機構14b側にオフセットして形成されている。ロック操作バー46aは、アーム本体36aの幅方向寸法と同様の長手寸法を有し、バー支持部42aから長手方向の両端部が露出した状態で、バー支持部42aによりその内側で長手方向の中央部が回動可能に支持され、且つ一端部がロックプレート40aの係合凹部44aに係合されている。ロック操作バー46aは、その一端部に図示しない突起を有しており、その突起が係合凹部44aに係合するロックプレート40aが第1アーム機構14aの先端側位置にあるか、基端側位置にあるかを反映した傾斜姿勢で位置させられている。たとえば、図6に示すように、ロックプレート40aが第1アーム機構14aの基端側位置にある場合は、ロック操作バー46aの一端側が基端部側に且つ他端側は先端部側に位置する傾斜姿勢とされる。反対に、図7に示すように、ロックプレート40aが第1アーム機構14aの先端側位置にある場合は、ロック操作バー46aの他端側が基端部側に且つ先端側は先端部側に位置する傾斜姿勢とされる。T字状のバー支持部42aは、ロック操作バー46aの両端部を択一的に当接させられるストッパ機能を有しており、これにより、ロックプレート40aは第1アーム機構14aの先端側位置と基端側位置との2位置の間で択一的に位置させられる。
図1および図4は、第1アーム機構14aが開かれた状態を示し、図2および図5は、第1アーム機構14aが閉じられた状態を示し、図5は、一対の針50および51のうちの先端側の針50が解放され且つ基端側の針51がロックされた状態を示し、図7は反対に先端側の針50がロックされ且つ基端側の針51が解放された状態を示している。一対の針50および51には、環状の係合溝52、53が両端部にそれぞれ形成され、且つ、結紮体として機能する糸状部材Lが通される貫通穴54が長手方向の中央部に形成されている。本実施形態においては、貫通穴54に糸状部材Lが通された状態で貫通穴54が潰れるように外力を加えて変形させる、いわゆるカシメ加工によって糸状部材Lは針50および51に固定されるが、糸状部材Lに貫通穴54より大きな結び目を形成したり、糸状部材を針50および51に接着するなどして固定しても構わない。また本実施形態においては針50の両端はテーパ状に尖って形成されており、針51の両端は平坦に形成されているが、針50および51が同一の形状であっても構わない。
図3の分解斜視図のうちアーム本体36aを拡大して示す図8に詳細に示すように、アーム本体36aの対向面のうち、アーム本体36aの先端部の位置とその先端部から所定距離アーム基台30a側へ隔てた位置の2位置には、針50および51の一端を受け入れる一対の受穴56aが形成されるとともに、ガイドカバー38aのその一対の受穴56aに対応する位置には、針50、51の通過が可能な一対の貫通穴58aが形成されている。また、一対の受穴56aおよび一対の貫通穴58aの一方および他方にそれぞれ対応するロックプレート40a上の位置には、一対の係合穴57aおよび59aがそれぞれ形成されている。一対の係合穴57a、59aのうちの先端側の係合穴57aは、ロックプレート40aが先端側位置にあるときには針50の係合溝52に係合して針50をロックし、ロックプレート40aが基端側位置にあるときには針50の通過を許容する穴形状とされている。すなわち、針50の径よりも大径の円と針50の係合溝52の溝底径よりも大きく且つ針50の径よりも小さな幅寸法を有する矩形の切欠きとが連結した前方後円形状とされている。一対の係合穴57a、59aのうちの基端側の係合穴59aは、反対に、ロックプレート40aが基端側位置にあるときには針50の係合溝52に係合して針51をロックし、ロックプレート40aが先端側位置にあるときには針51の通過を許容する穴形状とされている。
操作部材16は、円筒状を成し、その内周面には、第1アーム機構14aおよび第2アーム機構14bを開閉操作するためのアーム開閉カム溝60と後述の針50および針51のロックおよび解放を操作するための針ロックカム溝62とが環状に形成された筒状溝カム64を備えている。筒状溝カム64は操作部材16と一体的に形成されているが、図3においては図示の都合上分離して示している。また、図11および図12に示すように、操作部材16の内周面には、アーム本体36aおよび36bを回転させるためのピニオン66aおよび66bがそれぞれ噛み合う内周歯68aおよび68bが形成されている。内周歯68aおよび68bがピニオン66aおよび66bと係合していない状態から係合した状態を経て再び係合していない状態に至るまで操作部材16を一方向に回転させたとき、ピニオン66aおよび66bは丁度一回転するように構成されている。なお、第1アーム機構14aのアーム本体36aおよび第2アーム機構14bのアーム本体36bの一方を回転させてもループを形成させることができるので、この場合は、たとえば図31に示すように、操作部材16の内周面には、内周歯68aおよび68bのうちの一方が形成される。このように構成されると、操作部材16を一方向に回転させたとき、第1アーム機構14aのアーム本体36aおよび第2アーム機構14bのアーム本体36bはどちらか一方のみが一回転するという動作を交互に行なうことになる。
図3、図1の縦断面図である図9、および、図2の縦断面図である図10に示すように、操作力伝達機構18は、アーム本体36aを回転させる回転操作力を伝達するための、ピニオン66aおよびユニバーサルジョイント32aが両端に固定された第1回転操作力伝達軸70aと、アーム本体36bを回転させる操作力を伝達するための、ピニオン66bおよびユニバーサルジョイント32bが両端に固定された第2回転操作力伝達軸70bとを、備えている。操作部材16の所定角度の回転操作が図11の矢印に示す右まわり方向に行なわれると、第1回転操作力伝達軸70aを介して伝達される右まわりの回転操作力によりアーム本体36aがその長手方向である回転軸線C4を右まわりにアーム基台30aに対して相対回転させられると同時に、第2回転操作伝達軸70bを介して伝達される右まわりの回転操作力によりアーム本体36bがその長手方向である回転軸中心線C5を右まわりにアーム基台30bに対して相対回転させられる。操作部材16の所定角度の回転操作が図12に示す位置から更に左まわり方向に行なわれると、第1回転操作力伝達軸70aを介して伝達される左まわりの回転操作力によりアーム本体36aが左まわりにアーム基台30aに対して相対回転させられると同時に、第2回転操作伝達軸70bを介して伝達される左まわりの回転操作力によりアーム本体36bが左まわりにアーム基台30bに対して相対回転させられる。本実施例では、アーム本体36a、36bが、動作部として機能し、糸状部材Lを巻き付けてループを形成するループ形成手段の一部として機能している。
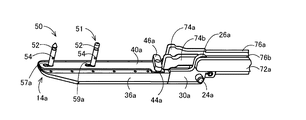
また、操作力伝達機構18は、第1開閉操作力伝達リンク72aおよび第2開閉操作力伝達リンク72bを備えている。第1開閉操作力伝達リンク72aは、第1アーム機構14aを開位置と閉位置とに開閉する開閉操作力を伝達するために、先端部が開閉連結アーム26aに回動可能に連結され、長手方向に対して直角に突き出してアーム開閉カム溝60に係合するカム係合部71aを基端部に有している。第2開閉操作力伝達リンク72bは、第2アーム機構14bを開位置と閉位置とに開閉する開閉操作力を伝達するために、先端部が開閉連結アーム26bに回動可能に連結され、長手方向に対して直角に突き出してアーム開閉カム溝60に係合するカム係合部71bを基端部に有している。
図4は、第1アーム機構14aが開位置へ回動させられた状態を示している。第1アーム機構14aは、第1開閉操作力伝達リンク72aが移動することにより、開位置へ回動させられる。第1開閉操作力伝達リンク72aは、操作部材16の操作に伴って移動する。具体的には、操作部材16が操作されると、アーム開閉カム溝60が回転させられる。アーム開閉カム溝60が回転し、第1開閉操作力伝達リンク72aが、アーム開閉カム溝60のカム曲線が長手基材12の先端側へ変化していく区間を通過すると、第1開閉操作力伝達リンク72aは、長手基材12の先端側へ移動させられる。第1開閉操作力伝達リンク72aが、長手基材12の先端側へ移動させられると、第1アーム機構14aが、開位置へ回動させられた状態となる。
図5は、第1アーム機構14aが開位置へ回動させられた状態を示している。第1アーム機構14aは、第1開閉操作力伝達リンク72aが移動することにより、閉位置へ回動させられる。第1開閉操作力伝達リンク72aは、操作部材16の操作に伴って移動する。具体的には、操作部材16が操作されると、アーム開閉カム溝60が回転される。アーム開閉カム溝60が回転し、第1開閉力伝達リンク72aが、アーム開閉カム溝60のカム曲線が長手基材12の基端側へ変化していく区間を通過すると、第1開閉操作力伝達リンク72aは、長手基材12の基端側へ移動させられる。第1開閉操作力伝達リンク72aが、長手基材12の基端側へ移動させられると、第1アーム機構14aが、開位置へ回動させられた状態となる。
第2アーム機構14bの第2開閉操作力伝達リンク72bも、第1アーム機構14aの第1開閉操作力伝達リンク72aと同様に、操作部材16の操作に関連して、第1開閉操作力伝達リンク72aと同期して長手基材12の先端側および長手基材12の基端側へ移動させられる。これにより、図1および図2に示すように、一対の第1アーム機構14aおよび第2アーム機構14bが開状態および閉状態とされる。
また、操作力伝達機構18は、第1アーム機構14aおよび第2アーム機構14b間で針50および51の一方を受け且つ他方を渡すことに先立って第1アーム機構14aおよび第2アーム機構14bが閉状態であるときに一対の針50および51についてそれまでの係合状態および解放状態の一方から他方へ切り換えるために、第1プッシュロッド76aおよび第2プッシュロッド76bを備えている。第1プッシュロッド76aは、一対のロック操作バー46a、46bの一端に当接してそれらを回動させるT字状の押上部74aを先端部に有し、長手方向に対して直角に突き出して針ロックカム溝62に係合するカム係合部75aを基端部に有する。第2プッシュロッド76bは、一対のロック操作バー46a、46bの他端に当接してそれらを回動させるT字状の押上部74bを先端部に有し、長手方向に対して直角に突き出して針ロックカム溝62に係合するカム係合部75bを基端部に有する。針ロックカム溝62は、図3に示されるように、第1プッシュロッド76aおよび第2プッシュロッド76bのうちの一方が長手基材12の先端側へ突き出されているときは他方が長手基材12の基端側へ引き込まれるように、そのカム曲線が形成されている。図6は、第1アーム機構14aにおいて、針50がロックプレート40aにより解放され且つ針51がロックプレート40aにより係合された状態を示している。このとき、図示しない第2アーム機構14bでは、逆に、針50がロックプレート40bにより係合され且つ針51がロックプレート40bにより解放されている。図7は、第1アーム機構14aにおいて、針50がロックプレート40aにより係合され且つ針51がロックプレート40aにより開放された状態を示している。このとき、図示しない第2アーム機構14bでは、逆に、針50がロックプレート40bにより開放され且つ針51がロックプレート40bにより係合されている。
このため、たとえば、基端側の針51が第1アーム機構14aに保持され且つ先端側の針50が第2アーム機構14bに保持された状態で第1アーム機構14aおよび第2アーム機構14bが閉じられる。次に、上記の動作によって、先端側の針50の一端が第2アーム機構14bのロックプレート40bにより係合状態から解放状態とされると同時に針50の他端が第1アーム機構14aのロックプレート40aにより解放状態から係合状態とされる。また、基端側の針51の一端が第1アーム機構14aのロックプレート40aにより解放状態から係合状態とされると同時に第2アーム機構14bのロックプレート40bにより解放状態から係合状態とされる。これにより、第1アーム機構14aおよび第2アーム機構14bが開かれたとき、基端側の針51が第2アーム機構14bに保持され且つ先端側の針50が第1アーム機構14aに保持された状態となる。すなわち、第1アーム機構14aおよび第2アーム機構14b間で、先端側の針50と基端側の51とが、交換される。
本実施例では、アーム本体36aの受穴56aのうちの先端側のもの、ガイドカバー38aの貫通穴58aのうち先端側のものと、第1アーム機構14aのロックプレート40aのうちの係合穴57aが形成された部分とが組み合わさって先端側の針50を保持する第1保持部材として機能している。また、アーム本体36bの受け穴56bのうちの先端側のものと、ガイドカバー38bの貫通穴58bのうち先端側のものと、第2アーム機構14bのロックプレート40bのうちの係合穴57bが形成された部分とが組み合わさって先端側の針50を保持する第2保持部材として機能している。また、アーム本体36aの受け穴56aのうちの基端側のものと、ガイドカバー38aの貫通穴58aのうち基端側のものと、第1アーム機構14aのロックプレート40aのうちの係合穴59aが形成された部分とが組み合わさって基端側の針51を保持する第3保持部材として機能している。また、アーム本体36bの受穴56bのうちの基端側のもの、ガイドカバー38bの貫通穴58bのうち基端側のものと、第2アーム機構14bのロックプレート40bのうちの係合穴59bが形成された部分とが組み合わさって基端側の針51を保持する第4保持部材として機能している。
図13は、操作部材16の1回転操作によって、ロックプレート40aおよびロックプレート40bによる針50および針51のロックおよび解放動作(但し、ロックプレート40bによるロックおよび解放動作は、図13に表わされていないが、ロックプレート40aの動作と逆の動作である)と、第1アーム機構14aのアーム本体36aおよび第2アーム機構14bのアーム本体36bの回転動作と、第1アーム機構14aおよび第2アーム機構14bの開閉動作との3つの動作が、結び目形成のために所定の順番で実行される状態を説明するチャートである。図13のチャートの横軸は、図11および図12の向きから見て右回りに操作部材16を回転させた角度を示している。チャートの横軸の原点から図11は約135度、図12は約45度すなわち図11から270度回転した位置の図示となっている。この操作部材16の1回転操作は、手動操作でもよいし、モータ駆動で操作部材16を回転操作する遠隔操作でもよい。
第1アーム機構14aおよび第2アーム機構14bに巻きつく後述の糸部材Lを移動させて外すために、図3、図9、図10に示すように、移動部材78が、円筒状の長手基材12の先端部から突き出し操作可能に長手基材12内に収容されている。移動部材78は、1本の線材から全体として逆U字状に曲成された部品であって、互いに平行な一対の長線部78aの先端同士を連結する短線部78bと、一方の長線部78aの基端から外向きに曲げられて部分円筒部材12aに形成された長穴80から突き出す操作突起部78cとを備えている。突き出し操作された移動部材78の短線部78bにより、被結紮体Lが第1アーム機構14aおよび第2アーム機構14bの長手方向に沿って長手基材12から離れる方向へ移動させられる。この移動部材78の突き出し操作は、操作突起部78cを手動により操作してもよいし、空圧シリンダ、電動シリンダなどのアクチュエータを用いて操作する遠隔操作であってもよい。
また、図3、図9、図10に示すように、長手基材12内の基端部側には、筒状の受け部材82が配設されている。受け部材82は、第1回転操作力伝達軸70aおよび第2回転操作力伝達軸70bを回転可能に支持する。また、受け部材82は、第1開閉操作力伝達リンク72aおよび第2開閉操作力伝達リンク72bをその長手方向の移動可能に支持するとともにそれら第1開閉操作力伝達リンク72aおよび第2開閉操作力伝達リンク72bの基端部側に設けられたカム係合部71aおよびカム係合部71bを一対のガイド穴82aを用いて長手方向に案内する。また、受け部材82は、第1プッシュロッド76aおよび第2プッシュロッド76bを長手方向の移動可能に支持するとともにそれら第1プッシュロッド76aおよび第2プッシュロッド76bの基端部側に設けられたカム係合部75aおよびカム係合部75bを一対のガイド穴82bを用いて長手方向に案内する。
以上のように構成された結び目形成装置10において、操作部材16を回転操作すると、図13に示すように、第1アーム機構14aおよび第2アーム機構14bを開閉操作、針50および針51のロックおよび解放操作、および、アーム本体36aおよびアーム本体36bの回転操作が行なわれる。その後、移動部材78により糸状部材Lが第1アーム機構14aおよび第2アーム機構14bから外されると、結び目M1が形成された糸状部材Lのループが自動的に形成される。本実施例の結び目形成装置10の動作を、以下に具体的に説明する。
糸状部材Lによって形成される結び目が、結紮対称物のまわりを囲む糸状部材Lを環状に閉じるような結び目とするには、糸状部材L、第1アーム機構14a、第2アーム機構14b、長手基材12からなる閉じた経路の中に結紮対称物が囲まれるようにする。図14の糸状部材Lと、破線Dとを合せた環状の経路がここでいう閉じた経路となる。たとえば、生体組織Tの縫合に糸状部材Lが適用される場合には、第2アーム機構14bのロックプレート40bによって先端側の針50をロックした状態から、第1アーム機構14aと第2アーム機構14bとを閉じ、第1アーム機構14aの先端部と第2アーム機構14bの先端部との間に挟まれた生体組織Tの縫合部分を先端側の針50で貫通させ、第1アーム機構14aのロックプレート40aによって先端側の針50をロックした状態で第1アーム機構14aと第2アーム機構14bとを開けば、生体組織Tの一部が糸状部材L、第1アーム機構14a、第2アーム機構14b、長手基材12からなる閉じた経路の中に囲まれた状態となる。糸状部材Lの所定位置すなわち第1位置に通された先端側の針50をロックプレート40aによりロックした第1アーム機構14aと、糸状部材Lの所定位置すなわち第2位置に通された基端側の針51をロックプレート40bでロックした第2アーム機構14bとを開いた直後の状態では、操作部材16は45度付近の操作位置にある。図14はこの状態を模式的に示している。
次に、操作部材16が135度付近までの操作過程では、第1アーム機構14aのアーム本体36aと第2アーム機構14bのアーム本体36bとが、第1アーム機構14aおよび第2アーム機構14bの開閉面に平行且つ第1アーム機構14aおよび第2アーム機構14bの長手方向の回転軸線C4、C5まわりに同じ回転方向に1回転させられることで、アーム本体36bまわりにループが形成される。ここでいうループとは、ある軸のまわりを糸状部材Lが1周、360度以上にわたって囲んでいる状態のときの、その取り囲んでいる部分のことをいう。これは言い換えると、ある軸に直交する平面に糸状部材Lを投影したときに糸状部材Lの写像が自己交差していて、写像のその交点を含む環状に閉じた部分の中に軸が存在するときの、写像の環状部分の元になった実体部分がループである。一般に結び目を作るには、糸状部材に形成されたループの中を、その糸の端部が通過しなければならない。このときの「通過する」とは、ループを定義する軸に沿ってループと糸の端部とが相対移動してすれ違い、軸方向の相対的な位置関係が入れ替わることにほかならない。ループはループの軸との関係で定義されるものであるから、例えば図15では正面から見た図では単なる逆S字に見える糸状部材のループが、図16に示すように回転軸C5の方向から見ると閉じた環になっているといったことが生じるが、軸に沿った方向において上記の「通過」がなされるなら、その他の方向からどのように見えようと結び目はできるし、逆に軸に沿った方向において上記の「通過」がなされなければ、他の方向からみてループができているように見えても結び目はできない。図15、図16および図17の模式図は第1ループ形成操作によって上記の意味でのループが形成された後の状態を示している。
図16(a)と図16(b)は生体組織Tが結び目形成装置10に対して図の手前に位置しているとき、図16(c)と図16(d)は生体組織Tが結び目形成装置10に対して図の奥側に位置しているときの、それぞれ回転軸線C4、C5の方向で基端側から見た図である。このように、糸状部材Lと結び目形成装置10との相対的な位置関係によってループができるか否か、或いはできる場合でもどのようにできるかは異なる場合がある。本実施例では、図16(a)と図16(b)のように生体組織Tが結び目形成装置10に対して図の手前側に位置してアーム本体36bまわりにループが形成される場合について説明するが、図16(c)と図16(d)のように生体組織Tが結び目形成装置10に対して図の奥側に位置してアーム本体36aまわりにループが形成される場合でも、全体の対称性により以後の説明において同じように結び目が形成される。本実施例では両方のアーム本体36aと36bを同じ方向に回転させることで、少なくともアーム本体36aと36bとのいずれか一方のまわりにループが形成されるように工夫されている。また、糸状部材Lの姿勢によっては、図16(b)と図16(d)のループを同時に形成することも可能である。
続いて、操作部材16を135度付近まで操作する第1アーム接近操作により、第1アーム機構14aと第2アーム機構14bとが閉じられる。糸状部材Lの姿勢によっては図15の状態の時点では上記定義によるループは完成していない場合も考えられるが、その場合もこのように第1アーム機構14aと第2アーム機構14bとが閉じられる過程の途中に上記定義によるループが完成する。図17の模式図はこの第1アーム接近操作が完了した状態を示している。
次いで、操作部材16を180度付近まで操作する第1切替操作により、針50の一端が第1アーム機構14aのロックプレート40aにより解放され且つ針50の他端が第2アーム機構14bのロックプレート40bによりロックされると同時に、針51の他端が第2アーム機構14bのロックプレート40bにより解放され且つ針51の一端が第1アーム機構14aのロックプレート40aによりロックされる。図17はこの第1切替操作前の状態を示し、図18はこの第1切替操作後の状態を示している。図17および図18において、針50および針51がロックされた状態が第1アーム機構14aと第2アーム機構14b内の斜線で示されている。そして、操作部材16が225度付近まで操作されると、第1アーム機構14aと第2アーム機構14bとが開かれる。図19および図20の概略図は、この第1アーム離間操作を示している。この状態では、糸状部材Lが第2アーム機構14bに1重に巻き付けられることでその糸状部材Lから成るループRが形成されていて、先端側の針50および基端側の針51の第1アーム機構14aと第2アーム機構14bとの間の受け渡しが完了している。このとき、糸状部材L、第1アーム機構14a、第2アーム機構14b、長手基材12からなる閉経路は、この時点でトポロジー的な意味で既に結び目になっている。物体を連続的に変形させて同じ形にすることができるとき、変形の前後の形状はトポロジー的に同一であるという。環状に閉じた糸状の物体の場合、糸が糸を素通りするような変形、或いは同じことであるが環を一度切断して糸を横切らせて再び環を閉じるような変形などの不連続な変形を伴わずに、連続的な変形(ライデマイスター移動という)のみで変形できるような形状がトポロジー的に同一であるといえる。一般に結び目を含まない環状に閉じた糸と、結び目を含む閉じた糸ではトポロジーが異なる。つまりトポロジー的に既に結び目であるということは、糸状部材L、第1アーム機構14a、第2アーム機構14b、長手基材12からなる閉経路を、連続的な変形のみによって、閉経路の糸状部材Lからなる部分のみに結び目形状が存在するような形に変形ができる状態であることを意味する。
図21は、第1アーム離間操作後に、糸状部材Lを第1アーム機構14aおよび第2アーム機構14bのうちの少なくとも第1アーム機構14aから外された状態を示す。糸状部材Lは、第1アーム離間操作、または第1アーム離間操作と移動部材78を矢印方向に突き出す操作との一連の操作が行なわれると、第1アーム機構14aと第2アーム機構14bから外れる。第1アーム離間操作および移動部材78を矢印方向に突き出す操作が行われるときの糸状部材Lは、閉じた経路のトポロジーの同一性を保ったままの連続的な変形により、図21の概略図に示すように、糸状部材Lのみで所謂単結紮の結び目M1が形成された状態となる。
糸状部材Lは、少なくとも第2アーム機構14bからは、長手基材12を移動させることによって、糸状部材Lを外してもよい。第1アーム機構14aおよび第2アーム機構14bにより以後に行われる動作において、支障がない場合は、糸状部材Lは、必ずしも第1アーム機構14aから外す必要はない。糸状部材Lが、図21に示す状態となった後、糸状部材Lを引き締め操作することで、図23の単結紮M1が得られる。すなわち、そのような単結紮形成操作により糸状部材Lによる単結紮M1が自動的に形成される。
前述のように、結び目を形成するためには、糸状部材Lが形成されたループの中を、その糸の端部が通過しなければならないが、2通り考えられるループ通過方向のうち一方は結び目を形成するが、他方は結び目を形成できない。これは、他方の方向のときにはループを通過する前にループが解消されてループでなくなってしまうためである。図22を用いてそれを詳細に説明する。図22において、ループを定義する仮想軸Kに直交する投影面S上に投影した糸状部材Lの射影が閉じた経路を作るとき、その閉じた経路の交点として射影される糸状部材Lの実体は、糸状部材Lの2位置、すなわち糸状部材Lの1端部である第1位置に近い方の第1交差位置Aと遠い方の第2交差位置Bとで構成される立体交差である。ループを通過させる糸状部材Lの1端部である第1位置を、そのループに対して第2交差位置B側から第1交差位置A側へ向かう方向すなわち仮想軸Kの矢印方向で通過させることにより結び目ができる。たとえば図21で言えば、アーム本体36bまわりにループが形成されている状態での第1アーム機構14aと第2アーム機構14bとの閉動作に続く針50および針51の受け渡しにより、糸状部材Lの第1位置である針50に通された部分は、ループの交点部分に対応する糸状部材Lの2位置のうちの第1位置よりも遠い側の第2交差位置B側から近い側の第1交差位置A側へそのループを相対的に通過させられているため、ループに結び目M1が形成される。
ここで、操作部材16が135度付近までの操作過程で、第1アーム機構14aのアーム本体36aと第2アーム機構14bのアーム本体36bとが、その長手方向の軸まわりに回転させられるとき、2回転させる操作を行なう歯数の内周歯68a、68bを有する操作部材16を用いることもできる。あるいは、第1アーム機構14aおよび第2アーム機構14bの開閉に用いられる操作部材16とは独立した第2の操作部材を用いてアーム本体36aとアーム本体36bとを回転させるような構成であれば、アーム本体36aとアーム本体36bとを1回転させる場合の2倍の角度だけ第2の操作部材を回転させることもできる。この場合には、糸状部材Lが第2アーム機構14bに2重に巻き付けられてループが形成される。この状態から針50および針51の受け渡しを行い、移動部材78の突き出し操作を行なって糸状部材Lを第1アーム機構14aと第2アーム機構14bから外すと、図24の概略図に示すように、所謂2重結紮の結び目M2が形成されたループが形成される。そして、糸状部材Lを引き締め操作することで図25の二重結紮M2が得られる。すなわち、本実施例の結び目形成装置10によれば、そのような二重結紮形成操作により二重結紮M2が自動的に形成される。
上記操作部材16の225度付近までの操作と移動部材78の突き出し操作とから成る単結紮形成操作を2回繰り返すと、図26の概略図に示す所謂女結びの結び目M3が形成されたループが形成されるとともに、糸状部材Lを引き締めることで、図27の女結びM3が得られる。すなわち、本実施例の結び目形成装置10によれば、上記の単結紮形成操作を2回繰り返すことで、女結びM3が自動的に形成される。
また、その2回の単結紮形成操作が行なわれるとき、1回目の単結紮形成時のアーム本体36aおよびアーム本体36bの回転方向に対して、2回目の単結紮形成時のアーム本体36aおよびアーム本体36bの回転方向を逆にすることにより、図28の概略図に示す所謂男結びの結び目M4が形成されたループが形成されるとともに、糸状部材Lを引き締めることで、図29の男結びM4が得られる。すなわち、本実施例の結び目形成装置10によれば、2回の前記単結紮形成操作を行なうことにより、男結びM4が自動的に形成される。本実施例では、操作部材16の回転方向を逆とすることでアーム本体36aおよびアーム本体36bを逆方向に回転させることができるように構成されている。
また、上記の二重結紮形成操作により二重結紮M2を形成後、それに続いて上記単結紮形成操作を行なうことで単結紮M1を形成することで、図30に示すような1段目に二重結紮M2、2段目に単結紮M1を持つ外科結紮M5が形成される。このような外科結紮M5も本実施例の結び目形成装置10を用いることにより自動的に形成することができる。なお、結び目を形成した後、それに続いて別の結び目を作る動作を行って上記のように複数の結び目が組み合わさった所謂多段結紮を形成する場合、一段目の結び目の形成が完了した状態では本実施例では第2アーム機構14bが針50を保持しており、第1アーム機構14aが針51を保持した状態になっている。したがって針50および51の交換動作を再度行って、装置を最初の状態に戻して同一の作業を行うことで二段目の結び目を形成することができるが、本実施例では第1アーム機構14aと第2アーム機構14bは機能的に対称に構成されているので、一段目の結び目の形成が完了した状態から直ちに二段目の結び目の形成を行うことが可能である。この場合、一段目の結び目の形成手順とは第1アーム機構14aと第2アーム機構14b、及びこれらの構成要素を逆に用いる。本明細書の上述の説明においては、添字aとbを入れ替えて読み替えればよい。
なお、図15、図16に示すループ形成操作では、第1アーム機構14aのアーム本体36aと第2アーム機構14bのアーム本体36bとがその長手方向の軸まわりに同じ回転方向に回転させられていたが、基端側の針51が固定されている第2アーム機構14bのアーム本体36bだけが1回転させられるものであってもよい、
本実施例の結び目形成装置10によれば、長手基材(ベース部)12の基端部に設けられた操作部材(操作部)16の操作により、第1アーム機構14aおよび第2アーム機構14bを相互に離間させ、針50に通された糸状部材Lの第1交差位置と針51に通された糸状部材Lの第2交差位置とを図15に示すように第1保持部材と前記第4保持部材で保持した状態で、図15に示すようにアーム本体(動作部)36a、36bにより糸状部材Lのループを形成させる第1ループ形成操作と、図17に示すように第1アーム機構14aおよび第2アーム機構14bを相互に接近させるアーム接近操作と、図18に示すように糸状部材Lの第1位置と第2位置を第1保持部材と第4保持部材により保持する状態から前記第2保持部材と第3保持部材により保持する状態へ切り替える第1切替操作と、図19に示すように糸状部材Lの第1位置と第2位置とを前記第2保持部材と第3保持部材とにより保持する状態で前記第1アーム機構14aおよび第2アーム機構14bを相互に離間させる第1アーム離間操作とを順次実行することにより、第1位置をループRに通過させて糸状部材Lに結び目Mを、自動的に形成することができる。また、結び目Mの形成の前後共に、糸状部材Lの両端が別々の第1アーム機構14aおよび第2アーム機構14bから離れた位置で保持されているため、糸状部材Lが絡まりにくく、その後の締めつけや切断が容易となる。
また、本実施例の結び目形成装置10によれば、アーム本体(動作部)36a、36bは、第1アーム機構14aおよび第2アーム機構14bに備えられ、操作部材(操作部)16は、1回目の結び目形成操作に続いて、第1アーム機構14aおよび第2アーム機構14bを相互に離間させ、糸状部材Lの第1位置と第2位置を第2保持部材と前記第3保持部材で保持した状態で、アーム本体(動作部)36a、36bにより糸状部材Lのループを形成させる第2ループ形成操作と、第1アーム機構14aおよび第2アーム機構14bを相互に接近させるアーム接近操作と、糸状部材Lの第1位置と第2位置を前記第2保持部材と第3保持部材により保持する状態から前記第1保持部材と第4保持部材により保持する状態へ切り替える第2切替操作と、糸状部材Lの第1位置と第2位置を前記第1保持部材と第4保持部材により保持する状態で第1アーム機構14aおよび第2アーム機構14bを相互に離間させる第2アーム離間操作とを順次実行することにより第1位置に前記ループを再度通過させる。アーム本体(ループ形成手段)36a、36bが前記第1アーム機構14aおよび第2アーム機構14bの両方に備えられることで、第1アーム機構14aおよび第2アーム機構14bは機能的に対称である。これにより、第1ループ形成操作、アーム接近操作、第1切替操作、および第1アーム離間操作を順次実行することにより第1の結び目を形成するのに続いて、直ちに、第2ループ形成操作、アーム接近操作、第2切替操作、および第2アーム離間操作とを順次実行することにより、糸状部材Lの第1位置に前記ループを再度通過させて次の第2の結び目を形成することができ、単純な操作で自動的に多段の結び目を形成することができる。
また、本実施例によれば、ループ形成に際して第1アーム機構14aおよび第2アーム機構14b自体に糸状部材Lを巻き付けることができるので、空間効率がよく、コンパクトな自動結紮可能な結び目形成装置が得られる。また、結び目形成の前後共に、糸状部材Lの両端が別々の第1アーム機構および第2アーム機構に離れて保持されているため、糸状部材Lが絡まりにくく、その後の締めつけや切断が容易となる。さらに、結び目形成装置10の先端の第1アーム機構14aと第2アーム機構14bとが開閉することで、それら第1アーム機構14aと第2アーム機構14bとにより挟まれる対称物たとえば生体組織Tの回りに結び目を形成することができる。また、操作部材16の操作に従った第2ホルダとしての第2アーム本体36bの回転によるループ形成動作を経ても第1位置と第2位置操作とを第1アーム機構14aと第2アーム機構14bとの間で交換できる。
次に、本発明の他の実施例を説明する。なお、以下の説明において、実施例相互に共通する部分には同一の符号を付して説明を省略する。
図32は、本発明の他の実施例における結び目形成装置100の第1アーム機構102aおよび第2アーム機構102bが開いた状態を示す正面図であり、図33は、結び目形成装置100の第1アーム機構102aおよび第2アーム機構102bが閉じた状態を示す正面図であり、図34は、結び目形成装置100を分解して示す斜視図である。本実施例の結び目形成装置100は、第1回転操作力伝達軸70aおよび第2回転操作力伝達軸70bを介してそれぞれ伝達される回転操作力に基づいて動作部として機能し且つ針50および51を着脱可能に保持する針ロック機構として機能する一対の第1円筒回転機構104aおよび第2円筒回転機構104bが、第1アーム機構102aおよび第2アーム機構102bの先端部にそれぞれ設けられている点、操作力伝達機構18が第1プッシュロッド76a、第2プッシュロッド76bを含まない点、および、操作部材として、長手基材12の基端部に回転操作可能に設けられた一対の開閉操作部材106および回転操作部材108が設けられている点で、図1の結び目形成装置10と比較して相違しているが、その他は同様に構成されている。
結び目形成装置100は、円筒状の長手基材12、一対の第1アーム機構102aおよび第2アーム機構102b、一対の開閉操作部材106および回転操作部材108、操作力伝達機構18を備えている。一対の第1アーム機構102aおよび第2アーム機構102bは、長手基材12の先端部に互いに平行な軸心線C2および軸心線C3まわりに回動可能にそれぞれ支持されて開閉可能に設けられている。一対の開閉操作部材106および回転操作部材108は、長手基材12の基端部において長手基材12の軸心線C1まわりに回転操作可能に設けられ、且つ相互に相対回転可能に設けられている。操作力伝達機構18は、長手基材12内に設けられ、開閉操作部材106の開閉操作力および回転操作部材108を一対の第1アーム機構102aおよび第2アーム機構102b、一対の第1円筒回転機構104aおよび第2回転機構104bへ伝達する。本実施例では、一対の開閉操作部材106および回転操作部材108が操作部として機能している。
第1アーム機構102aおよび第2アーム機構102bは相互に同様に構成されているので、第1アーム機構102aについて説明する。第1アーム機構102aは、アーム本体114a、カバー118a、第1円筒回転機構104a、回転駆動軸122aを、備えている。アーム本体114aは、開閉連結アーム26aが一方に固定され且つ外向きに突き出す突軸24aをそれぞれ有する一対の平行プレート110aとその一対の平行プレート110aに挟まれて位置するとともにユニバーサルジョイント32aを回転可能に受け入れる貫通穴28aが形成されたジョイント受け部材112aとを基端部に有する。アーム本体114aと、カバー118aは、円形の開口116aが先端部に形成され、アーム本体114aの対向面を覆うようにアーム本体114aに固定されている。回転駆動軸122aは、アーム本体114aとカバー118aとの間に、貫通穴28aの中心軸線すなわち第1アーム機構102aの長手方向に平行な回転軸線C4まわりに回転可能に支持され、基端にユニバーサルジョイント32aが連結され、先端にピニオン120aが固定されている。
第1円筒回転機構104aは、図35および図36にも示されるように、第1アーム機構102aのアーム本体114aおよびカバー118aの先端部に設けられている。図37は、第1円筒回転機構104aの構成を説明する縦断面図である。第1円筒回転機構104aは、円筒部材128a、傘歯車部材132a、ガイドプレート136aを備えている。円筒部材128aは、アーム本体114aから内向きに突設された円筒状軸受124a内に嵌め入れられた中心軸部126aを有して円筒状軸受124aにより第1アーム機構102aおよび第2アーム機構102bの開閉面に平行且つ回転軸線C4に直交する回転軸線C6まわりに回転可能に支持され、カバー118aの先端部に形成された円形の開口116aを通して一部が突き出た状態で装着されている。傘歯車部材132aは、円筒状軸受124aの先端部の外周面により回転可能に支持され、外周に突き出すプレート状のロックフランジ130aを有する。ガイドプレート136aは、アーム本体114aとカバー118aとの間に挟持され、内側に位置するロックフランジ130aの外周縁との間に環状スロット134aを形成するガイドプレート136aとを備えている。傘歯車部材132aが回転駆動軸122aの軸端に設けられたピニオン120aと噛み合うことで、円筒部材128aおよび傘歯車部材132aが回転軸線C6まわりに回転駆動されるようになっている。
円筒部材128aは、円筒部材128aと傘歯車部材132aとの間に介挿されたスプリング138aによって突き出し方向に付勢されている。これにより、第1アーム機構102aおよび第2アーム機構102bが閉じた状態において、図38に示すようにスプリング138aの付勢力に抗して押し込まれることにより、所定厚みの生体組織Tを円筒部材128aと円筒部材128bとの間に挟むことが可能とされている。
図39および図40は、ロックフランジ130aとガイドプレート136aとの間で針50を解放し且つ針51をロックした状態をそれぞれ示すアーム本体114a側から見た図であって、図39は第1円筒回転機構104aをアーム本体114a側から見た図、図40は図39から円筒部材128a、回転駆動軸122aおよびカバー118aを取り除いて示す図である。また、図41は、ロックフランジ130aとガイドプレート136aとの間で針50をロックし且つ針51を解放した状態を示す図40に相当する図である。また、図42は、ロックフランジ130aとガイドプレート136aとの間で針50を解放し且つ針51をロックした状態で、円筒部材128aを回転させた状態を示す図39に相当する図である。
ロックフランジ130aの外周縁とガイドプレート136aの内周縁との間に形成された環状スロット134aの径方向寸法は、針50および針51の外径よりも小さく、係合溝52の溝底径よりも大きく設定されている。また、ガイドプレート136aの内周縁のうち回転軸線C6を通り且つ回転軸線C4に直交する直線上の2位置には、針50および針51の外径の曲率半径よりも大きい曲率半径の円弧形状を有する外側円弧状切欠き139aおよび140aが、回転軸線C6に対して反対側位置に形成されている。そして、ロックフランジ130aの外周縁のうちの180度周方向に離隔した2位置には、針50および針51の径の曲率半径よりも大きい曲率半径を有し、外側円弧状切欠き139aおよび140aとの間で針50および針51の通過を許容する内側円弧状切欠き142aおよび144aと、ガイドプレート136aの内周縁との間に針50および針51の係合溝52の溝底径よりも大きく且つ針50の外径よりも小さな間隔を形成する内側矩形切欠き146aおよび148aとが、半前方後円状に連結して形成されている。そして、円筒部材128aの外周面のうちの180度周方向に離隔した2位置には、針50および針51を受け入れるための回転軸線C6に平行な断面半円状の針受入溝150aおよび152aが、形成されている。
これにより、図39では、円筒部材128aの針受入溝150aに受け入れられた針50は外側円弧状切欠き139aと内側円弧状切欠き142aとの間で抜けが許容され、且つ、円筒部材128aの針受入溝152aに受け入れられた針51は外側円弧状切欠き140aと内側矩形切欠き148aとの間で抜けが阻止された状態が示されている。この状態から、図40に示すように左回りにロックフランジ130aおよび傘歯車部材132aが回転させられると、抜けが阻止された針51に押されて円筒部材128aも回転させられて、円筒部材128aの外周面に糸状部材Lが巻き掛けられ、糸状部材Lのループが形成される。円筒部材128aの回転量が他方の円筒部材128bに対して相対的に360度に到達すると、回転停止させられる。図41はこの状態を示している。この状態では、図39と同様に、針50は外側円弧状切欠き139aと内側円弧状切欠き142aとの間で抜けが許容され、且つ、針51は外側円弧状切欠き140aと内側矩形切欠き148aとの間で抜けが阻止されている。この状態から、右回りにロックフランジ130aおよび傘歯車部材132aが所定角度逆回転させられると、図42に示されるように、針50は外側円弧状切欠き139aと内側矩形切欠き146aとの間で抜けが阻止され、且つ、針51は外側円弧状切欠き140aと内側円弧状切欠き144aとの間で抜けが阻止される。すなわち、最後にどちら向きに回転したかで、針50および針51のロック状態が切り替えられる。
本実施例では、第1円筒回転機構104aにおいて、傘歯車部材132aに形成されたロックフランジ130aのうち内側円弧状切欠き142aおよび内側矩形切欠き146aが形成された部分と、ガイドプレート136aのうち外側円弧状切欠き139aが形成された部分との組み合わせが、針50を保持する第1保持部材として機能している。第2円筒回転機構104bにおいて、傘歯車部材132bに形成されたロックフランジ130bのうち内側円弧状切欠き142bおよび内側矩形切欠き146bが形成された部分と、ガイドプレート136bのうち外側円弧状切欠き139bが形成された部分との組み合わせが、針50を保持する第2保持部材として機能している。第1円筒回転機構104aにおいて、傘歯車部材132aに形成されたロックフランジ130aのうち内側円弧状切欠き144aおよび内側矩形切欠き148aが形成された部分と、ガイドプレート136aのうち外側円弧状切欠き140aが形成された部分との組み合わせが、針51を保持する第3保持部材として機能している。第2円筒回転機構104bにおいて、傘歯車部材132bに形成されたロックフランジ130bのうち内側円弧状切欠き144bおよび内側矩形切欠き148bが形成された部分と、ガイドプレート136bのうち外側円弧状切欠き140bが形成された部分との組み合わせが、針51を保持する第4保持部材として機能している。
図34に示すように、本実施例の結び目形成装置100の長手基材12の基端部には、その軸心線C1まわりに回転操作可能に設けられた円筒状の開閉操作部材106と、開閉操作部材106に隣接して長手基材12の軸心線C1まわりに回転操作可能に設けられた円筒状の回転操作部材108とが、相互に独立して操作可能に設けられている。開閉操作部材106は、第1アーム機構102aおよび第2アーム機構102bを開閉操作するためのアーム開閉カム溝60が環状に形成された筒状溝カム64を内側に一体的に備えている。筒状溝カム64は操作部材16と一体的に形成されているが、図34においては図示の都合上分離して示している。
回転操作部材108の内周面には、第1円筒回転機構104aの円筒部材128aおよび第2円筒回転機構104bの円筒部材128bを回転させるため、および、針50および51のロックおよびアンロックを切り替えるために、第1回転操作力伝達軸70aのピニオン66aおよび第2回転操作力伝達軸70bのピニオン66bがそれぞれ噛み合う内周歯68aが、図45および図46に示すように形成されている。図45は、一対の第1アーム機構102aおよび第2アーム機構102bが開かれた状態を示し、図46は、第1アーム機構102aおよび第2アーム機構102bが閉じられた状態を示している。
図32の縦断面図である図43、および、図33の縦断面図である図44に示すように、操作力伝達機構18は、第1円筒回転機構104aを回転させる回転操作力を伝達するために図45に示す回転操作部材108の内周歯68aと噛み合うピニオン66aおよびユニバーサルジョイント32aが両端に固定された第1回転操作力伝達軸70aと、第2回転機構104bを回転させる操作力を伝達するために図45に示す回転操作部材108の内周歯68aと噛み合うピニオン66bおよびユニバーサルジョイント32bが両端に固定された第2回転操作力伝達軸70bとを、備えている。また、操作力伝達機構18は、第1アーム機構102aを開位置と閉位置とに開閉する開閉操作力を伝達するために、先端部が開閉連結アーム26aに回動可能に連結され、長手方向に対して直角に突き出してアーム開閉カム溝60に係合するカム係合部71aを基端部に有する第1開閉操作力伝達リンク72aと、第2アーム機構102bを開位置と閉位置とに開閉する開閉操作力を伝達するために、先端部が開閉連結アーム26bに回動可能に連結され、長手方向に対して直角に突き出してアーム開閉カム溝60に係合するカム係合部71bを基端部に有する第2開閉操作力伝達リンク72bとを備えている。
図47は、開閉操作部材106の1回転操作による第1アーム機構102aおよび第2アーム機構102bの開閉動作と、所定の回転位相区間内における回転操作部材108による第1円筒回転機構104aおよび第2円筒回転機構104bの回転動作および針50および針51の交換動作とが、結び目形成のために所定の順番で実行される状態を説明するチャートである。図47のチャートの横軸は、図45および図46の向きから見て右回りに開閉操作部材106を回転させた角度を示している。回転操作部材108は、第1円筒回転機構104aの円筒部材128aおよび第2円筒回転機構104bの円筒部材128bを回転させて糸状部材Lを巻き付ける動作をさせる場合には、第1アーム機構102aおよび第2アーム機構102bが開位置にある区間において操作され、第1円筒回転機構104aと第2円筒回転機構104bとの間で針50および針51を交換する場合には、第1アーム機構102および第2アーム機構102bが閉位置にある区間において操作される。チャートの横軸の原点から図45は約135度、図46は約45度回転した位置の図示となっている。この開閉操作部材106および回転操作部材108の回転操作は、手動操作でもよいし、モータ駆動で回転操作する遠隔操作でもよい。
以上のように構成された結び目形成装置100において、開閉操作部材106および回転操作部材108の操作により、糸状部材Lのループが自動的に形成され且つ結び目M1が形成される動作を、以下に具体的に説明する。なお、図48から図53において、説明を容易とするために、針50および針51の配置位置を縦方向に変更している。
たとえば、生体組織Tの縫合に糸状部材Lが適用される場合には、第2アーム機構102bの第2円筒回転機構104bによって針50をロックした状態から、第1アーム機構102aと第2アーム機構102bとを閉じる。これにより、第1アーム機構102aの先端部と第2アーム機構102bの先端部との間に挟まれた生体組織Tの縫合部分を針50で貫通させる。次いで、第1アーム機構102aの第1円筒回転機構104aによって針50をロックした状態で第1アーム機構102aと第2アーム機構102bとを開けば、生体組織Tの一部が糸状部材L、第1アーム機構102a、第2アーム機構102b、長手基材12からなる閉じた経路の中に囲まれた状態となる。糸状部材Lの第1位置に通された針50を第1円筒回転機構104aによりロックした第1アーム機構102aと、糸状部材Lの第2位置に通された針51を第2円筒回転機構104bでロックした第2アーム機構102bとを開いた直後の状態では、開閉操作部材106は45度付近の操作位置にある。図48はこの状態を模式的に示している。
次に、開閉操作部材106が135度付近までの操作過程では、回転操作部材108が操作されることにより、第1円筒回転機構104aの円筒部材128aと第2円筒回転機構104bの円筒部材128bとが、第1アーム機構102aおよび第2アーム機構102bの開閉面に平行且つ第1アーム機構102a第1アーム機構102aの長手方向に平行な回転軸線C4第2アーム機構102bの長手方向に平行な回転軸線C4、C5に直交する回転軸心C6、C7まわりに半回転すなわち相対的に1回転させられる。これにより、糸状部材Lが第1円筒回転機構104aの円筒部材128aおよび第2円筒回転機構104bの円筒部材128bまわりに巻き付けられるので、ループが形成される。図49の模式図はこのループ形成操作された状態を示している。
ここで、回転操作部材108を、第1円筒回転機構104aを回転駆動する第1回転操作力伝達軸70aのピニオン66aが噛み合う内周歯を有する第1の回転操作部材と、第2円筒回転機構104bを回転駆動する第2回転操作力伝達軸70bのピニオン66bが噛み合う内周歯を有する第2の回転操作部材とに分割して設けることができる。このように構成される場合は、第1の回転操作部材および第2の回転操作部材によって第1円筒回転機構104aおよび第2円筒回転機構104bが独立して回転操作できるので、第1円筒回転機構104aの円筒部材128aと第2円筒回転機構104bの円筒部材128bとの一方を回転させることで相対的に1回転させ、第1円筒回転機構104aの円筒部材128aおよび第2円筒回転機構104bの円筒部材128bの一方の外周面に糸状部材Lを巻き付けてもよい。また、上記のように、第1円筒回転機構104aの円筒部材128aと第2円筒回転機構104bの円筒部材128bとの一方を回転させる場合は、他方の円筒回転機構は除去されてもよい。
続いて、開閉操作部材106を135度付近まで操作する第1アーム接近操作により、第1アーム機構102aと第2アーム機構102bとが閉じられる。図50の模式図はこの第1アーム接近操作を示している。そして、この第1アーム機構102aと第2アーム機構102bとが閉じられた状態において、回転操作部材108を所定角度の戻し操作する第1切替操作により、針50の一端が第1円筒回転機構104aのロックフランジ130aにより解放され且つ針50の他端が第2円筒回転機構104bのロックフランジ130bによりロックされる。同時に、針51の他端が第2円筒回転機構104bのロックフランジ130bにより解放され且つ針51の一端が第1円筒回転機構104aのロックフランジ130aによりロックされる。図50はこの第1切替操作前の状態を示し、図51はこの第1切替操作後の状態を示している。図50および図51において、針50および針51がロックされた状態が第1円筒回転機構104aの円筒部材128aおよび第2円筒回転機構104bの円筒部材128b内の斜線で示されている。
そして、開閉操作部材106が225度付近まで操作されると、第1アーム機構102aと第2アーム機構102bとが開かれる。図52は、その第1アーム機構102aと第2アーム機構102bとの離間操作後の状態を示している。この状態では、糸状部材Lが第2アーム機構102bに1重に巻き付けられてループRが形成されていて、第1円筒回転機構104aの円筒部材128aと第2円筒回転機構104bの円筒部材128bとの間で、針50および針51の受け渡しが完了している。この図52に示す状態では、図19と同様に、糸状部材L、第1アーム機構102a、第2アーム機構102b、長手基材12からなる閉経路は、この時点でトポロジー的な意味で既に結び目になっている。糸状部材L、第1アーム機構102a、第2アーム機構102b、長手基材12からなる閉経路は、連続的な変形のみによって、閉経路の糸状部材Lからなる部分のみに結び目形状が存在するような形に変形ができる状態である。
たとえばこの段階で、移動部材78の矢印方向の突き出し操作を行なって糸状部材Lを第1アーム機構102aおよび第2アーム機構102bから外すと、閉じた経路のトポロジーの同一性を保ったままの連続的な変形により、図53の概略図に示すように、糸状部材Lのみで所謂単結紮の結び目M1が形成された状態となる。そして、糸状部材Lを引き締め操作することで、たとえば図23の単結紮M1が得られる。すなわち、そのような単結紮形成操作により糸状部材Lによる単結紮M1が自動的に形成される。
ここで、開閉操作部材106の操作により第1アーム機構102aおよび第2アーム機構102bが開いている期間、たとえば45度から135度までの操作過程において、回転操作部材108により、円筒部材128aと円筒部材128bとの相対回転を2回転させることができる。この場合には、糸状部材Lが円筒部材128aおよび128bに2重に巻き付けられてループが形成される。この状態から針50および針51の受け渡しを行い、移動部材78の突き出し操作を行なって糸状部材Lを第1アーム機構102aと第2アーム機構102bから外し、糸状部材Lを引き締め操作することで図25の二重結紮M2が得られる。すなわち、本実施例の結び目形成装置100によれば、そのような二重結紮形成操作により二重結紮M2が自動的に形成される。
また、上記の開閉操作部材106および回転操作部材108による単結紮形成操作を2回繰り返すことによりループを形成してその糸状部材Lを引き締めることで、図27の女結びM3が得られる。すなわち、本実施例の結び目形成装置10によれば、上記の単結紮形成操作を2回繰り返すことで、女結びM3が自動的に形成される。また、その2回の上記単結紮形成操作が行なわれるとき、1回目の単結紮形成時の円筒部材128aおよび128bの相対回転方向に対して、2回目の単結紮形成時の回転方向を逆にすることによりループを形成して糸状部材Lを引き締めることで、図29の男結びM4が得られる。また、上記の二重結紮形成操作により二重結紮M2を形成後、それに続いて上記単結紮形成操作を行なうことで単結紮M1を形成することで、図30に示すような1段目に二重結紮M2、2段目に単結紮M1を持つ外科結紮M5を自動的に形成することができる。
本実施例の結び目形成装置100によれば、前述の実施例の結び目形成装置10と同様の効果が得られるのに加えて、第1円筒回転機構104aと第2円筒回転機構104bとの離間動作の方向と、糸状部材Lのうちの針50に係合している第1位置のループ通過方向とが同じであるので、第1アーム機構102aと第2アーム機構102bとの離間動作を利用して糸状部材Lのうちの針50に係合している第1位置をループに通過させることができる利点がある。また、第1ホルダとして機能する円筒部材128aおよび第2ホルダとして機能する円筒部材128bがそれぞれ180度またはその倍数だけ逆向きに回転することで、円筒部材128aと円筒部材128bとのループ形成動作が対称になるので、部品が共通化されるとともに、駆動部の動作ストロークが半分にできる利点がある。
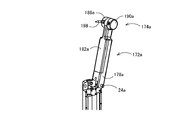
図54は、本発明の他の実施例における結び目形成装置170の第1アーム機構172aおよび第2アーム機構172bが開いた状態を示す正面図であり、図55は、結び目形成装置170の第1アーム機構172aおよび第2アーム機構172bが閉じた状態を示す正面図であり、図56は、結び目形成装置170を分解して示す斜視図である。本実施例の結び目形成装置170は、第1回転操作力伝達軸70aおよび第2回転操作力伝達軸70bを介してそれぞれ伝達される回転操作力に基づいて、動作部として機能し且つ長針198および短針200を着脱可能に保持する針ロック機構として機能する一対の第1針保持機構174aおよび第2針保持機構174bが、第1アーム機構172aおよび第2アーム機構172bの先端部にそれぞれ設けられている点、操作力伝達機構18が第1プッシュロッド76a、第2プッシュロッド76bを含まない点、および、操作部材として、長手基材12の基端部に回転操作可能に設けられた一対の開閉操作部材106および回転操作部材108が設けられている点で、図1の結び目形成装置10と比較して相違しているが、その他は同様に構成されている。
結び目形成装置170は、円筒状の長手基材12、一対の第1アーム機構172aおよび第2アーム機構172b、一対の開閉操作部材106および回転操作部材108、操作力伝達機構18を備えている。一対の第1アーム機構172aおよび第2アーム機構172bは、長手基材12の先端部に互いに平行な軸心線C2および軸心線C3まわりに回動可能にそれぞれ支持されて開閉可能に設けられている。一対の開閉操作部材106および回転操作部材108は、長手基材12の基端部において長手基材12の軸心線C1まわりに回転操作可能に設けられ、且つ相互に相対回転可能に設けられている。操作力伝達機構18は、長手基材12内に設けられ、開閉操作部材106の開閉操作力および回転操作部材108の回転操作力を一対の第1アーム機構172aおよび第2アーム機構172b、一対の第1針保持機構174aおよび第2針保持転機構174bへそれぞれ伝達する。本実施例では、一対の開閉操作部材106および回転操作部材108が操作部として機能している。
第1アーム機構172aおよび第2アーム機構172bは相互に同様に構成されているので、第1アーム機構172aについて説明する。図57の開状態を示す図、図58の閉状態を示す図、図59の分解図にも示すように、第1アーム機構172aは、アーム本体178a、カバー182a、第1針保持機構174a、回転駆動軸186aを、備えている。アーム本体178aは、開閉連結アーム26aが一方に固定され且つ外向きに突き出す突軸24aをそれぞれ有する一対の平行プレート110aとその一対の平行プレート110aに挟まれて位置するとともにユニバーサルジョイント32aを回転可能に受け入れる貫通穴28aが形成されたジョイント受け部材112aとを基端部に有し且つ第1軸受部176aを先端部に有する。カバー182aは、第1軸受部176aと組合せられることで第1針保持機構174aを回転可能に支持する第2軸受け部180aを先端部に有し、アーム本体178aの対向面を覆うようにアーム本体178aに固定されている。第1針保持機構174aは、アーム本体178aおよびカバー182aの先端部において第1軸受部176aおよび第2軸受け部180aにより、第1アーム機構172aおよび第2アーム機構172bの開閉面に直交且つ第1アーム機構172aの長手方向すなわち回転軸線C4方向に直交する回転軸線C8まわりに回転可能に支持されている。回転駆動軸186aは、アーム本体178aとカバー182aとの間に、貫通穴28aの中心軸線すなわち回転軸線C4まわりに回転可能に支持され、基端にユニバーサルジョイント32aが連結され、先端にピニオン184aが固定されている。
図57、図58に示されるように、第1アーム機構172aの先端部に設けられている第1針保持機構174aは、図59の要部分解斜視図に詳しく示されるように、回転軸192a、筒状の一対の第1ロック歯車部材194aおよび第2ロック歯車部材196aを、備えている。回転軸192aは、第1軸受部176aおよび第1針保持機構174aにより回転軸線C8まわりに回転可能に支持された、有底円筒状の第1キャップ188aおよび第2キャップ190aが両端に固定されている。一対の第1ロック歯車部材194aおよび第2ロック歯車部材196aは、第1キャップ188aおよび第2キャップ190a内にそれぞれ嵌め入れられ且つ第1キャップ188aおよび第2キャップ190aにより相対回転可能に支持されている。これにより、一対の第1ロック歯車部材194aおよび第2ロック歯車部材196aと回転駆動軸186aの先端に固定されたピニオン184aとがかみ合わせられることで、一対の第1ロック歯車部材194aおよび第2ロック歯車部材196aが回転軸線C8まわりに逆まわりに回転駆動されるようになっている。
本実施例では、両端が尖った長針198と両端が平坦な短針200が用いられる。長針198および短針200は、前述の針50および51と同様に、相互に同径であって、環状の係合溝52、53が両端部にそれぞれ形成され、且つ、結紮体として機能する糸状部材Lが通される貫通穴54が長手方向の中央部に形成されている。長針198は、第1ロック歯車部材194aと第2ロック歯車部材194bとの間で受け渡され、短針200は、第2ロック歯車部材196aと第2ロック歯車部材196baとの間で受け渡されるようになっている。本実施例では長針198及び短針200は挿入穴202aおよび204aに滑らかに誘い込まれるよう、第1アーム機構172aおよび第2アーム機構172bの回転半径程度の曲率半径をもって円弧状に形成されているが、直針形状であっても差し支えない。
図60は、第1ロック歯車部材194aと回転駆動軸186aの先端に固定されたピニオン184aとが噛み合った状態を示す斜視図であり、図61は、第1ロック歯車部材194aの幅方向の中心を通る回転軸線C8に直交する断面図である。図60および図61は、いずれも長針198のアンロック(解放)状態を示している。図62は、図60と同様の斜視図であるが、長針198のロック(係合)状態を示している。
第1針保持機構174aにおいて、第1キャップ188aおよび第2キャップ190aの外周面のうち、回転軸線C8を通る1アーム機構172aの回動運動の円弧上には、長針198および短針200を差し入れるためにそれらの外径よりも大径の挿入穴202aおよび204aがそれぞれ形成されている。また、第1ロック歯車部材194aおよび第2ロック歯車部材196aには、長針198および短針200の外径よりも大径の円穴206aおよび208aと長針198および短針200の係合溝52、53の溝底径よりも大きく且つ長針198および短針200の外径よりも小さい幅の矩形穴210aおよび212aとが結合した前方後円形状の係合穴214aおよび216aがそれぞれ形成されている。
これにより、図60および図61では、第1キャップ188aの挿入穴202a内に挿入された長針198は、その係合溝53が第1ロック歯車部材194aに形成された係合穴214a内に入れられた状態にあるが、係合穴214aの円穴206aと挿入穴202aとの回転位相が一致しているので、長針198の係合溝53と係合穴214aとが係合せず、長針198はアンロック状態とされている。図62では、第1ロック歯車部材194aが第1キャップ188aに対して回転位相が左まわり方向に進められており、係合穴214aの矩形穴210aが長針198の係合溝53に係合して長針198の抜けが阻止された状態、すなわちロック状態とされる。この状態において第1ロック歯車部材194aがさらに左まわり方向に回転させられると、長針198に押されて第1キャップ188aも回転軸線C8まわりに回転させられる。これに対して、第1ロック歯車部材194aが右まわり方向に所定の位相だけ移動回転させられて、係合穴214aの円穴206aと挿入穴202aとの回転位相が一致させられると、長針198が図60および図61に示すようにアンロック状態とされる。すなわち、最後にどちら向きに回転したかで、長針198のロック状態が切り替えられる。
本実施例では、第1針保持機構174aにおいて、第1ロック歯車部材194aに形成された係合穴214aのうちの矩形穴210aが形成された部分と、第1キャップ188aの挿入穴202aが形成された部分との組み合わせが、長針198を保持する第1保持部材として機能している。第2針保持機構174bにおいて、第1ロック歯車部材194bに形成された係合穴214bのうちの矩形穴210bが形成された部分と、第1キャップ188bの挿入穴202bが形成された部分との組み合わせが、長針198を保持する第2保持部材として機能している。第1針保持機構174aにおいて、第2ロック歯車部材216aに形成された係合穴216aのうちの矩形穴212aが形成された部分と、第2キャップ190aの挿入穴204aが形成された部分との組み合わせが、長針198を保持する第3保持部材として機能している。第2針保持機構174bにおいて、第2ロック歯車部材216bに形成された係合穴216bのうちの矩形穴212bが形成された部分と、第2キャップ190bの挿入穴204bが形成された部分との組み合わせが、長針198を保持する第4保持部材として機能している。
図56に示すように、本実施例の結び目形成装置170の長手基材12の基端部には、その軸心線C1まわりに回転操作可能に設けられた円筒状の開閉操作部材106と、開閉操作部材106に隣接して長手基材12の軸心線C1まわりに回転操作可能に設けられた円筒状の回転操作部材108とが、相互に独立して操作可能に設けられている。開閉操作部材106は、第1アーム機構172aおよび第2アーム機構172bを開閉操作するためのアーム開閉カム溝60が環状に形成された筒状溝カム64を内側に一体的に備えている。筒状溝カム64は操作部材16と一体的に形成されているが、図56においては図示の都合上分離して示している。
回転操作部材108の内周面には、第1針保持機構174aおよび第2針保持機構174bを回転させるため、長針198および短針200ロックおよびアンロックを切り替えるために、第1回転操作力伝達軸70aのピニオン66aおよび第2回転操作力伝達軸70bのピニオン66bがそれぞれ噛み合う内周歯68aが、図63および図64に示すように形成されている。図63は、一対の第1アーム機構172aおよび第2アーム機構172bが開かれた状態を示し、図64は、第1アーム機構172aおよび第2アーム機構172bが閉じられた状態を示している。
図54の縦断面図である図65、および、図55の縦断面図である図66に示すように、操作力伝達機構18は、第1針保持機構174aを回転させる回転操作力を伝達するために図63に示す回転操作部材108の内周歯68aと噛み合うピニオン66aおよびユニバーサルジョイント32aが両端に固定された第1回転操作力伝達軸70aと、第2針保持機構174bを回転させる操作力を伝達するために図63に示す回転操作部材108の内周歯68aと噛み合うピニオン66bおよびユニバーサルジョイント32bが両端に固定された第2回転操作力伝達軸70bとを、備えている。また、操作力伝達機構18は、第1アーム機構172aを開位置と閉位置とに開閉する開閉操作力を伝達するために、先端部が開閉連結アーム26aに回動可能に連結され、長手方向に対して直角に突き出してアーム開閉カム溝60に係合するカム係合部71aを基端部に有する第1開閉操作力伝達リンク72aと、第2アーム機構172bを開位置と閉位置とに開閉する開閉操作力を伝達するために、先端部が開閉連結アーム26bに回動可能に連結され、長手方向に対して直角に突き出してアーム開閉カム溝60に係合するカム係合部71bを基端部に有する第2開閉操作力伝達リンク72bとを備えている。
図67は、開閉操作部材106の1回転操作による第1アーム機構172aおよび第2アーム機構172bの開閉動作と、所定の回転位相区間内における回転操作部材108による第1針保持機構174aおよび第2針保持機構174bの回転動作および第1針保持機構174aおよび第2針保持機構174b間での長針198および短針200の交換動作とが、結び目形成のために所定の順番で実行される状態を説明するチャートである。図67のチャートの横軸は、図63および図64の向きから見て右回りに開閉操作部材106を回転させた角度を示している。回転操作部材108は、第1針保持機構174aの円筒状の第1キャップ188aおよび第2キャップ190aと第2針保持機構174bの第1キャップ188bおよび第2キャップ190bとを回転させて糸状部材Lを巻き付ける動作をさせる場合には、第1アーム機構172aおよび第2アーム機構172bが開位置にある区間において操作され、第1針保持機構174aと第2針保持機構174bとの間で長針198および短針200を交換する場合には、第1アーム機構172および第2アーム機構172bが閉位置にある区間において操作される。チャートの横軸の原点から図63は約135度、図64は約45度回転した位置の図示となっている。この開閉操作部材106および回転操作部材108の回転操作は、手動操作でもよいし、モータ駆動で回転操作する遠隔操作でもよい。
以上のように構成された結び目形成装置170において、開閉操作部材106および回転操作部材108の操作により、糸状部材Lのループが自動的に形成され且つ結び目M1が形成される動作を、以下に具体的に説明する。
たとえば、生体組織Tの縫合に糸状部材Lが適用される場合には、第2アーム機構172bの第2針保持機構174bによって長針198をロックした状態で、第1アーム機構172aと第2アーム機構172bとを閉じる。これにより、第1アーム機構172aの先端部と第2アーム機構172bの先端部との間に挟まれた生体組織Tの縫合部分を長針198で貫通させる。次いで、第1アーム機構172aの第1針保持機構174aによって長針198をロックした状態で第1アーム機構172aと第2アーム機構172bとを開く。これにより、生体組織Tの一部が糸状部材L、第1アーム機構172a、第2アーム機構172b、長手基材12からなる閉じた経路の中に囲まれた状態となる。糸状部材Lの第1位置に通された長針198を第1針保持機構174aによりロックした第1アーム機構172aと、糸状部材Lの第2位置に通された短針200を第2針保持機構174bでロックした第2アーム機構172bとを開いた直後の状態では、開閉操作部材106は45度付近の操作位置にある。図68はこの状態を模式的に示している。
次に、開閉操作部材106が135度付近までの操作過程では、回転操作部材108が操作されることにより、第1針保持機構174aの第1キャップ188aと第2針保持機構174bの第2キャップ190bが、その回転軸心C8、C9まわりに1回転させられる。これにより、糸状部材Lが第1針保持機構174aの第1キャップ188aと第2針保持機構174bの第2キャップ190bまわりに巻き付けられるので、ループが形成される。図69の模式図はこのループ形成操作された状態を示している。
続いて、開閉操作部材106を135度付近まで操作する第1アーム接近操作により、第1アーム機構172aと第2アーム機構172bとが閉じられる。図70の模式図はこの第1アーム接近操作を示している。そして、この第1アーム機構172aと第2アーム機構172bとが閉じられた状態において、回転操作部材108を所定角度の戻し操作する第1切替操作により、長針198一端が第1針保持機構174aのロック歯車部材194aにより解放され且つ長針198の他端が第2円筒回転機構174bのロック歯車部材194bによりロックされると同時に、短針200の他端が第2針保持機構174bのロック歯車部材196bにより解放され且つ短針200の一端が第1針保持機構174aのロック歯車部材196aによりロックされる。図70はこの第1切替操作前の状態を示し、図71はこの第1切替操作後の状態を示している。図70および図71において、長針198および短針200がロックされた状態が第1針保持機構172aの第1キャップ188aおよび第2キャップ190a内および第2針保持機構174bの第1キャップ188bおよび第2キャップ190b内の斜線で示されている。
そして、開閉操作部材106が225度付近まで操作されると、第1アーム機構172aと第2アーム機構172bとが開かれる。図72は、その第1アーム機構172aと第2アーム機構172bとの離間操作後の状態を示している。この状態では、糸状部材Lが第1針保持機構174aおよび第2針保持機構174bに1重に巻き付けられてループRが形成されていて、第1針保持機構174aの第1キャップ188aと第2針保持機構174bの第1キャップ188bとの間、および、第1針保持機構174aの第2キャップ190aと第2針保持機構174bの第2キャップ190bとの間で、長針198および短針200の受け渡しが完了している。この図72に示す状態では、図19と同様に、糸状部材L、第1アーム機構102a、第2アーム機構102b、長手基材12からなる閉経路は、この時点でトポロジー的な意味で既に結び目になっている。糸状部材L、第1アーム機構102a、第2アーム機構102b、長手基材12からなる閉経路は、連続的な変形のみによって、閉経路の糸状部材Lからなる部分のみに結び目形状が存在するような形に変形ができる状態である。
たとえばこの段階で、移動部材78の矢印方向の突き出し操作を行なって糸状部材Lを第1アーム機構172aおよび第2アーム機構172bから外すと、閉じた経路のトポロジーの同一性を保ったままの連続的な変形により、図73の概略図に示すように、糸状部材Lのみで所謂単結紮の結び目M1が形成された状態となる。そして、糸状部材Lを引き締め操作することで、たとえば図23の単結紮M1が得られる。すなわち、そのような単結紮形成操作により糸状部材Lによる単結紮M1が自動的に形成される。
ここで、開閉操作部材106の操作により第1アーム機構172aおよび第2アーム機構172bが開いている期間、たとえば45度から135度までの操作過程において、回転操作部材108により、第1針保持機構174aと第2針保持機構174との回転を2回転させることができる。この場合には、糸状部材Lが第1針保持機構174aと第2針保持機構174bに2重に巻き付けられてループが形成される。この状態から長針198および短針200の受け渡しを行い、移動部材78の突き出し操作を行なって糸状部材Lを第1アーム機構102aと第2アーム機構102bから外し、糸状部材Lを引き締め操作することで図25に示す二重結紮M2が得られる。すなわち、本実施例の結び目形成装置170によれば、そのような二重結紮形成操作により二重結紮M2が自動的に形成される。
また、上記の開閉操作部材106および回転操作部材108による単結紮形成操作を2回繰り返すことによりループを形成してその糸状部材Lを引き締めることで、図27の女結びM3が得られる。すなわち、本実施例の結び目形成装置170によれば、上記の単結紮形成操作を2回繰り返すことで、女結びM3が自動的に形成される。また、その2回の上記単結紮形成操作が行なわれるとき、1回目の単結紮形成時の第1針保持機構174aと第2針保持機構174bの回転方向に対して、2回目の単結紮形成時の回転方向を逆にすることによりループを形成して糸状部材Lを引き締めることで、図29の男結びM4が得られる。また、上記の二重結紮形成操作により二重結紮M2を形成後、それに続いて上記単結紮形成操作を行なうことで単結紮M1を形成することで、図30に示すような1段目に二重結紮M2、2段目に単結紮M1を持つ外科結紮M5を自動的に形成することができる。
本実施例の結び目形成装置170によれば、前述の実施例の結び目形成装置10と同様の効果が得られるのに加えて、第1針保持機構174aと第2針保持機構174bとの間に別の部材が存在しないので、第1針保持機構174aと第2針保持機構174bとの離間動作の方向に装置が大きくならず、また糸状部材Lを第1アーム機構172aと第2針保持機構174bの先端近傍で扱うことができるため、装置のコンパクトさと、糸状部材Lの巻き付け操作性およびループ通過の操作性とのバランスがよい。また、本実施例の結び目形成装置170によれば、第4保持部材の回転軸線C9は、長手基材12との接続部と前記第4保持部材とを結ぶ直線すなわち第2アーム機構172bの長手方向である回転軸線C5の方向に直交する方向である。これにより、糸状部材Lの第2位置が針などの硬性部材である場合でも、第4保持部材を回転させることで、糸状部材Lを第2アーム機構172bに沿わせてコンパクトに収納することができる。また、第1アーム機構172aおよび第2アーム機構172bの開閉方向よび長手方向のどちらとも交差する向きを回転軸線C8、C9に第1ホルダおよび第2ホルダ(円筒状の第1キャップおよび第2キャップ)が回転すると、糸端に針などが付いていても、針を第1アーム機構および第2アーム機構の長手方向に向けることができるので、針の長さに制約されず、結び目形成装置が小型化できる。
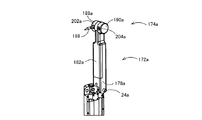
図74は、本発明の他の実施例における結び目形成装置230の第1アーム機構232aおよび第2アーム機構232bが開いた状態を示す正面図であり、図75は、結び目形成装置230の第1アーム機構232aおよび第2アーム機構232bが閉じた状態を示す正面図であり、図76は、結び目形成装置230を分解して示す斜視図である。本実施例の結び目形成装置230は、第1回転操作力伝達軸70aおよび第2回転操作力伝達軸70bを介してそれぞれ伝達される回転操作力に基づいて動作部として機能し且つ針50および針付円板234を着脱可能に保持する針ロック機構として機能する一対の第1針円板保持機構236aおよび第2針円板保持機構236bが、第1アーム機構232aおよび第2アーム機構232bの先端部にそれぞれ設けられている点、操作力伝達機構18が第1プッシュロッド76a、第2プッシュロッド76bを含まない点、および、操作部材として、長手基材12の基端部に回転操作可能に設けられた一対の開閉操作部材106および回転操作部材108が設けられている点、および移動部材78が設けられていない点で、図1の結び目形成装置10と比較して相違しているが、その他は同様に構成されている。
結び目形成装置230は、円筒状の長手基材12、一対の第1アーム機構232aおよび第2アーム機構232b、一対の開閉操作部材106および回転操作部材108、操作力伝達機構18を、備えている。一対の第1アーム機構232aおよび第2アーム機構232bは、長手基材12の先端部に互いに平行な軸心線C2および軸心線C3まわりに回動可能にそれぞれ支持されて開閉可能に設けられている。一対の開閉操作部材106および回転操作部材108は、長手基材12の基端部において長手基材12の軸心線C1まわりに回転操作可能に設けられ、且つ相互に相対回転可能に設けられている。操作力伝達機構18は、長手基材12内に設けられ、開閉操作部材106の開閉操作力および回転操作部材108の回転操作力を一対の第1アーム機構232aおよび第2アーム機構232b、一対の第1針円板保持機構236a、および第2針円板保持機構236bへそれぞれ伝達する。本実施例では、一対の開閉操作部材106および回転操作部材108が操作部として機能している。
第1アーム機構232aおよび第2アーム機構232bは相互に同様に構成されているので、第1アーム機構232aについて説明する。図76の分解図、図77の開状態を示す図、図78の閉状態を示す図にも示すように、第1アーム機構232aは、アーム本体238a、カバー240a、第1針円板保持機構236a、伸縮回転駆動軸242aを、備えている。アーム本体238aは、開閉連結アーム26aが一方に固定され且つ外向きに突き出す突軸24aをそれぞれ有する一対の平行プレート110aとその一対の平行プレート110aに挟まれて位置するとともにユニバーサルジョイント32aを回転可能に受け入れる貫通穴28aが形成されたジョイント受け部材112aとを基端部に有し且つ第1針円板支持機構236aを先端部に有する。カバー240aは、アーム本体238aの対向面を覆うようにアーム本体238aに固定されている。第1針円板保持機構236aは、アーム本体238aおよびカバー240aの先端部内に設けられ、針50および針付円板234を着脱可能に保持するとともに、針付円板234を第1アーム機構232aおよび第2アーム機構232bの開閉面に平行且つ第1アーム機構232aの長手方向すなわち回転軸線C4方向に直交する回転軸線C6まわりに回転可能に支持する。伸縮回転駆動軸242aは、アーム本体238aとカバー240aとの間に、貫通穴28aの中心軸線すなわち回転軸線C4まわりに回転可能に支持され、基端にユニバーサルジョイント32aが連結され、先端にピニオン184aが固定されている。
図79の要部分解斜視図に詳しく示されるように、第1針円板保持機構236aの伸縮回転駆動軸242aは、管状の基軸244a、移動軸248a、ギヤ箱部材254a、スプリング258aを、備えている。管状の基軸244aは、その基端部にユニバーサルジョイント32aが連結されている。移動軸248aは、先端部にピニオン246aが固定され、基軸244a内にその先端側から相対回転不能且つ軸方向の相対移動可能に差し入れられている。ギヤ箱部材254aは、アーム本体238aに形成された一対の案内面250a間に挟まれることにより第1アーム機構232aの長手方向すなわち回転軸線C4方向に移動可能に案内され、且つピニオン246aと傘歯車252aとを相互に噛み合った状態で保持する。スプリング258aは、アーム本体238aおよびカバー240aに形成されたバネ受面256aとギヤ箱部材254aとの間に介挿され、移動軸248aを伸長方向に付勢する。
また、針付円板234は、外周部に周方向に連ねて設けられた4個の周方向突起を一面に有し、それら周方向突起が相互に突き合わせられた状態で重ねられた一対の円板260a、262aが、圧入などにより針51に固定されている。これにより、針付円板234は、一対の円板260aおよび262a間に、外周部に4つの連通穴を有し且つ針51の貫通穴54が開口する内部空間を有している。本実施例では、糸状部材Lの針50とは反対側の端がこの4つの連通穴の内の1つから針付円板234の内部の空間に挿入され、別の連通穴のうちの1つから引き出された形に配置されている。この構成により、針付円板234の回転に伴って、糸状部材Lの一部もまた回転することができ、また針付円板234から引き出された糸状部材Lの端を引くことで、糸状部材L全体に張力を発生させることができる。なお、糸状部材Lの端部は針付円板234に固定されていてもよく、この場合は糸状部材Lの端部を引いて糸状部材全体に張力を発生させることはできないが、針付円板234の回転に伴う糸状部材Lの一部の回転は実現される。また、針付円板234の外周部には、針50との干渉を防止するための外周縁から中心に向かってU字状切欠き263aが一箇所形成されている。また、カバー240aには、針51を通すために回転軸線C4に平行な方向に長い形状の貫通穴である長穴264aと、針50を通すために長穴264aの長手方向に位置する円形の貫通穴266aとが形成されている。
図80、図81、図82に示すように、傘歯車252aは、回転中心が偏心している円板である偏心板268aにその回転中心と同心となるように固定されている。偏心板268の外周縁は針50の係合溝52に係合して針50の抜けを阻止する。偏心板268の外周縁のうち、偏心板268aの回転中心との間が最も短い位置には、針50を通すための円弧状切欠き270aが形成されている。偏心板268aの回転中心には、針51を通すための円穴272aが形成されている。また、カバー240aの貫通穴266aの両側には、偏心板268の外周面に摺接して偏心板268の回転を許容しつつ第1アーム機構232aの長手方向すなわち回転軸線C4方向の位置決めをする一対のローラ274aが回転可能に設けられている。
図82に詳しく示すように、傘歯車252aに設けられた中心穴276aは、D字状断面を有するとともに、針51の係合溝52からの端部形状もその中心穴276aに相対回転不能に挿入可能なD字状断面を有しているので、針51の一端部が傘歯車252aの中心穴276aに嵌め入れられた状態では、針付円板234が伸縮回転駆動軸242aによって回転駆動可能とされている。また、カバー240aに形成された長穴264aは、針51の係合溝52の径よりは大きいが、針51のD字状断面形状の最小外径よりは小さい幅寸法に形成されている。長穴264aの上端部および下端部は、針51の外径(最大径)よりは小さく、係合溝52の径よりは大きく形成され、且つD字状に局所的に形成されている。長穴264aの上端部および下端部のD字状は、針51のD字状断面形状の最大径よりは小さいが針51のD字状断面形状の最小外径よりは大きな幅寸法である。これにより、針51は、長穴264aの上端部および下端部において、その端部が特定の回転位相状態においてのみ通過可能とされているが、長穴264aの上端部および下端部以外の位置では、係合溝52と長穴264aとの係合によって引き抜き不能とされている。なお、長穴264aの上端部および下端部では、針51の通過許容姿勢が180度異なるように形成されている。
本実施例では、針50は、第1針円板保持機構236aの偏心板268aと第2針円板保持機構236bの偏心板268bとの間で受け渡され、針51は、第1針円板保持機構236aの長穴264aと第2針円板保持機構236bの長穴264との間で受け渡されるようになっている。第1針板保持機構236aの傘歯車252aに設けられた中心穴276aのD字状断面は、第2針板保持機構236bの傘歯車252bに設けられた中心穴276bのD字状断面に対して位相がずらされている。
これにより、針50は、カバー240aに形成された貫通穴266aと偏心板268の外周縁に形成された円弧状切欠き270aとが一致したときに第1針円板保持機構236a内に差し出し可能なアンロック状態にあるが、その状態から偏心板268が回転させられると、偏心板268の外周縁と針50の係合溝52とが係合して針50の抜けが阻止された図81に示すロック状態とされる。また、針51は、針50のアンロック状態から偏心板268がわずかに回転させられると、傘歯車252aの中心穴276aのD字状断面と長穴264aの上端部を通過した針51の端部の断面形状が一致するので、アンロック状態とされる。図80および図81はこの状態を示している。この状態から偏心板268が回転させられて図80と図81との間の回転位相となると、傘歯車252aの中心穴276aに嵌合された針51は偏心板268aと共に回転してその係合溝52が長穴264aに係合するので、ロック状態となる。
本実施例では、第1針円板保持機構236aにおいて、カバー240aの貫通穴266aが形成された部分と、偏心板268aの円弧状切欠き270aが形成された部分とが、針50を保持する第1保持部材として機能している。第2針円板保持機構236bにおいて、カバー240bの貫通穴266bが形成された部分と、偏心板268bの円弧状切欠き270bが形成された部分とが、針50を保持する第2保持部材として機能している。第1針円板保持機構236aにおいて、カバー240aの長穴264aが形成された部分と、傘歯車252aの中心穴276aが形成された部分とが、針51を保持する第3保持部材として機能している。第2針円板保持機構236bにおいて、カバー240bの長穴264bが形成された部分と、傘歯車252bの中心穴276bが形成された部分とが、針51を保持する第4保持部材として機能している。
図76に示すように、本実施例の結び目形成装置230の長手基材12の基端部には、その軸心線C1まわりに回転操作可能に設けられた円筒状の開閉操作部材106と、開閉操作部材106に隣接して長手基材12の軸心線C1まわりに回転操作可能に設けられた円筒状の回転操作部材108とが、相互に独立して操作可能に設けられている。開閉操作部材106は、第1アーム機構232aおよび第2アーム機構232bを開閉操作するためのアーム開閉カム溝60が環状に形成された筒状溝カム64を内側に一体的に備えている。筒状溝カム64は操作部材16と一体的に形成されているが、図76においては図示の都合上分離して示している。
回転操作部材108の内周面には、針付円板234を回転させるため、および、針50および51のロックおよびアンロックを切り替えるために、第1回転操作力伝達軸70aのピニオン66aおよび第2回転操作力伝達軸70bのピニオン66bがそれぞれ噛み合う内周歯68aが、図83および図84に示すように形成されている。図83は、一対の第1アーム機構232aおよび第2アーム機構232bが開かれた状態を示し、図84は、第1アーム機構232aおよび第2アーム機構232bが閉じられた状態を示している。
図74の縦断面図である図85、および、図76の縦断面図である図86に示すように、操作力伝達機構18は、第1回転操作力伝達軸70aと第2回転操作力伝達軸70bとを、備えている。第1針円板保持機構236aの傘歯車252aを回転させる回転操作力を伝達するために図83に示す回転操作部材108の内周歯68aと噛み合うピニオン66aおよびユニバーサルジョイント32aが、第1回転操作力伝達軸70aの両端に固定されている。第2針円板保持機構236bを回転させる操作力を伝達するために図83に示す回転操作部材108の内周歯68aと噛み合うピニオン66bおよびユニバーサルジョイント32bが、第2回転操作力伝達軸70bの両端に固定されている。また、操作力伝達機構18は、第1開閉操作力伝達リンク72aと第2開閉操作力伝達リンク72bとを備えている。第1開閉操作力伝達リンク72aは、第1アーム機構232aを開位置と閉位置とに開閉する開閉操作力を伝達するために、開閉連結アーム26aに回動可能に連結された先端部と、長手方向に対して直角に突き出してアーム開閉カム溝60に係合するカム係合部71aを有する基端部とを備えている。第2開閉操作力伝達リンク72bは、第2アーム機構232bを開位置と閉位置とに開閉する開閉操作力を伝達するために、開閉連結アーム26bに回動可能に連結された先端部と、長手方向に対して直角に突き出してアーム開閉カム溝60に係合するカム係合部71bを有する基端部とを備えている。
図87は、開閉操作部材106の1回転操作による第1アーム機構232aおよび第2アーム機構232bの開閉動作と、所定の回転位相区間内における回転操作部材108による第1針円板保持機構236aおよび第2針保持機構236bの回転動作および第1針円板保持機構236aおよび第2針円板保持機構236b間での針50および針51の交換動作とが、結び目形成のために所定の順番で実行される状態を説明するチャートである。図87のチャートの横軸は、図83および図84の向きから見て右回りに開閉操作部材106を回転させた角度を示している。回転操作部材108は、第1針円板保持機構236a或いは第2針円板保持機構236bにより保持された針付き円板234を回転させて糸状部材Lを巻き付ける動作をさせる場合には、第1アーム機構232aおよび第2アーム機構232bが開位置にある区間において操作され、第1針円板機構236aと第2円板針保持機構236bとの間で針50および針51を交換する場合には、第1アーム機構232aおよび第2アーム機構232bが閉位置にある区間において操作される。チャートの横軸の原点から図83は約135度、図84は約45度回転した位置の図示となっている。この開閉操作部材106および回転操作部材108の回転操作は、手動操作でもよいし、モータ駆動で回転操作する遠隔操作でもよい。
以上のように構成された結び目形成装置230において、開閉操作部材106および回転操作部材108の操作により、糸状部材Lのループが自動的に形成され且つ結び目M1が形成される動作を、以下に具体的に説明する。
たとえば、生体組織Tの縫合に糸状部材Lが適用される場合には、第2アーム機構232bの第2針円板保持機構236bによって針50をロックし、且つ針付円板234を下方へ移動させた状態から、第1アーム機構232aと第2アーム機構232bとを閉じる。これにより、第1アーム機構232aの先端部と第2アーム機構232bの先端部との間に挟まれた生体組織Tの縫合部分を先端側に位置する針50で貫通させる。次いで、第1アーム機構172aの第1針円板保持機構236aによって針50をロックし、第2アーム機構172bの第2針円板保持機構236aによって針51をロックした状態で、第1アーム機構232aと第2アーム機構232bとを開く。これにより、生体組織Tの一部が糸状部材L、第1アーム機構232a、第2アーム機構232b、長手基材12からなる閉じた経路の中に囲まれた状態となる。糸状部材Lの第1位置に通された針50を第1針円板保持機構236aによりロックした第1アーム機構232aと、糸状部材Lの第2位置に通された針51を第2円板持機構236bでロックした第2アーム機構232bとを開いた直後の状態では、開閉操作部材106は45度付近の操作位置にある。図88はこの状態を模式的に示している。
次に、開閉操作部材106が135度付近までの操作過程では、回転操作部材108が操作されることにより、第2針円板保持機構236bに保持されている針51を有する針付円板234が、その回転軸心C9まわりに1回転させられる。これにより、糸状部材Lがその針付円板234まわりに巻き付けられるので、ループが形成される。図89の模式図はこのループ形成操作された状態を示している。
続いて、開閉操作部材106を135度付近まで操作する第1アーム接近操作により、第1アーム機構232aと第2アーム機構232bとが閉じられる。図90の模式図はこの第1アーム接近操作を示している。そして、この第1アーム機構232aと第2アーム機構232bとが閉じられた状態において、回転操作部材108を所定角度の更に操作する第1切替操作により、針50の一端が第1針円板保持機構236aの偏心板268aにより解放され且つ針50の他端が第2針円板保持機構236bの偏心板268aによりによりロックされると同時に、針51の他端が第2針円板保持機構236bの傘歯車252bの回転により解放され且つ針51の一端が第1針円板保持機構236aの傘歯車252aの回転によりロックされる。図90はこの第1切替操作前の状態を示し、図91はこの第1切替操作後の状態を示している。図90および図91において、針50よび針51がロックされた状態が第1アーム機構232aおよび第2アーム機構232b内の斜線で示されている。
そして、開閉操作部材106が225度付近まで操作されると、第1アーム機構232aと第2アーム機構232bとが開かれる。図92は、その第1アーム機構232aと第2アーム機構232bとの離間操作後の状態を示している。この状態では、糸状部材Lが第1アーム機構232aの針付円板234に1重に巻き付けられてループRが形成されていて、第1アーム機構232aの第1針円板保持機構236aと第2アーム機構232bの第2針円板保持機構236bとの間で、針50および針51の受け渡しが完了している。この図92に示す状態では、図19と同様に、糸状部材L、第1アーム機構102a、第2アーム機構102b、長手基材12からなる閉経路は、この時点でトポロジー的な意味で既に結び目になっている。糸状部材L、第1アーム機構102a、第2アーム機構102b、長手基材12からなる閉経路は、連続的な変形のみによって、閉経路の糸状部材Lからなる部分のみに結び目形状が存在するような形に変形ができる状態である。
たとえばこの段階で、糸状部材Lを第1アーム機構172aおよび第2アーム機構172bから外すと、閉じた経路のトポロジーの同一性を保ったままの連続的な変形により、図93の概略図に示すように、糸状部材Lのみで所謂単結紮の結び目M1が形成された状態となる。そして、糸状部材Lを引き締め操作することで、たとえば図23の単結紮M1が得られる。すなわち、本実施例の結び目形成装置230によれば、そのような単結紮形成操作により糸状部材Lによる単結紮M1が自動的に形成される。なお、糸状部材Lの引き締め操作は、糸状部材Lの針50とは反対側の端部を引くことで簡単に実現できる。
ここで、開閉操作部材106の操作により第1アーム機構232aおよび第2アーム機構232bが開いている期間、たとえば45度から135度までの操作過程において、回転操作部材108により、針付円板234を2回転させることができる。この場合には、糸状部材Lが針付円板234の外周に2重に巻き付けられてループが形成される。この状態から針50および針51の受け渡しを行い、糸状部材Lを第1アーム機構102aと第2アーム機構102bから外し、糸状部材Lを引き締め操作することで図25に示す二重結紮M2が得られる。すなわち、本実施例の結び目形成装置230によれば、そのような二重結紮形成操作により二重結紮M2が自動的に形成される。
また、上記の開閉操作部材106および回転操作部材108による単結紮形成操作を2回繰り返すことによりループを形成してその糸状部材Lを引き締めることで、図27の女結びM3が得られる。すなわち、本実施例の結び目形成装置230によれば、上記の単結紮形成操作を2回繰り返すことで、女結びM3が自動的に形成される。また、その2回の上記単結紮形成操作が行なわれるとき、1回目の単結紮形成時の第1針保持機構174aと第2針保持機構174bの回転方向に対して、2回目の単結紮形成時の回転方向を逆にすることによりループを形成して糸状部材Lを引き締めることで、図29の男結びM4が得られる。また、上記の二重結紮形成操作により二重結紮M2を形成後、それに続いて上記単結紮形成操作を行なうことで単結紮M1を形成することで、図30に示すような1段目に二重結紮M2、2段目に単結紮M1を持つ外科結紮M5を自動的に形成することができる。
本実施例の結び目形成装置230によれば、前述の実施例の結び目形成装置10と同様の効果が得られるのに加えて、第1針保持機構174aと第2針保持機構174bとの離間動作の方向と、糸状部材Lのうちの長針198に係合している第1位置のループ通過方向とが同じであるので、第1アーム機構172aと第2アーム機構172bとの離間動作を利用して糸状部材Lのうちの長針198に係合している第1位置をループに通過させることができる利点がある。また、糸状部材Lの引き締め操作が簡単に実現できるという利点もある。
図94は、本発明の他の実施例の結び目形成装置300を説明する模式図である。本実施例の第1アーム機構14aおよび第2アーム機構14bは、それらの長手方向において相対移動可能に長手基材12に設けられている。本実施例の結び目形成装置300は、前述の結び目形成装置10と比較すると、結び目形成装置10の第1アーム機構14aおよび第2アーム機構14bが回転軸線C2および回転軸線C3まわりに開閉動作させられるに対して、結び目形成装置300の第1アーム機構14aおよび第2アーム機構14bがそれらの長手方向に相対移動させられる点で相違するが、他は同様である。本実施例の第1アーム機構14aおよび第2アーム機構14bは、それらの一方に設けられた案内溝に他方に設けられた被案内突部が嵌め入れられたスライド機構を介して、互いに平行な方向に相対移動させられる。或いは、第1アーム機構14aおよび第2アーム機構14bは、それらの間に設けられた平行リンクを介して連結されることで、互いに平行な姿勢を維持しつつ相対移動させられる。
図95は、たとえば実施例2の第1アーム機構114aおよび第2アーム機構114bの先端部にそれぞれ設けられている円筒部材128aおよび円筒部材128bの回転軸線C6および回転軸線C7方向の寸法を大きくした例であって、第2アーム機構114bの先端部に設けられた円筒部材328bを示している。この円筒部材328bは、その回転時において糸状部材Lを引っかけるために径方向に突き出す突起330を先端部に有し、針51を基端部に保持するように構成されている。これによれば、円筒部材328bがその回転軸線C7まわりに回転させられて第4保持部材に係合している糸状部材Lがその外周面に巻き付けられるとき、糸状部材Lが突起330に引っかけられるので、糸状部材Lが確実に巻き付けられる利点はある。
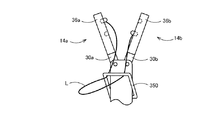
図96は、たとえば実施例1の結び目形成装置100の長手部材12に、第1アーム機構14aおよび第2アーム機構14bから伸びる糸状部材Lを下向きに変形させるためのガイド部材350が設けられた例を示す模式図である。このガイド部材350は、アーム本体36aおよび36bの一方および/また他方に糸状部材Lを巻き付けるときに糸状部材Lを長手部材12側へ案内することができるので、確実に糸状部材Lを巻き付けることができる。このガイド部材350は、逆U字状に形成されている。このガイド部材350は。逆L字状に形成されることもできる。この場合は、アーム本体36aおよび36bの一方および/また他方に巻き付けた後の糸状部材Lをガイド部材350から容易に外すことができる。
以上、本発明の一実施例を図面に基づいて説明したが、本発明はその他の態様においても適用される。
たとえば、前述の実施例の糸状部材Lは、好適には、植物性或いは動物性の天然繊維から撚られた天然糸、合成繊維の単線或いは撚り線から成る合成樹脂糸、金属製の単線或いは撚り線から成る金属糸、天然繊維および合成繊維から成る複合糸などの、結紮可能な前記被結紮体が用いられる。
また、前述の実施例の移動部材78は、円筒状の長手基材12内からその長手基材12の長手方向へ突き出し可能に設けられ、その先端部が一対の第1アーム機構14aおよび第2アーム機構14bの間で直線的に移動させられるものであったが、一対の第1アーム機構14aおよび第2アーム機構14bの一方に、そのアーム機構の長手方向に平行移動可能或いはアーム機構に対して回動可能に設けられたものであってもよい。
また、前述の実施例の結び目形成装置10、100、170、230においては、ループを形成するための動作部としてアーム本体36aおよび36b、第1円筒回転機構104aおよび第2円筒回転機構104b、第1針保持機構174aおよび第2針保持機構174b、第1針円板保持機構236aおよび第2針円板保持機構236bが設けられていたが、糸状部材Lにひねりを加えてループを形成する糸ひねり機構を動作部として備えるものであってもよい。
その他一々例示はしないが、本発明は当業者の知識に基づいて種々の変更、改良を加えた態様で実施することができる。