JP6378198B2 - トレーラー連結車のブレーキを制御するための方法及び牽引車用のブレーキ制御装置 - Google Patents
トレーラー連結車のブレーキを制御するための方法及び牽引車用のブレーキ制御装置 Download PDFInfo
- Publication number
- JP6378198B2 JP6378198B2 JP2015548246A JP2015548246A JP6378198B2 JP 6378198 B2 JP6378198 B2 JP 6378198B2 JP 2015548246 A JP2015548246 A JP 2015548246A JP 2015548246 A JP2015548246 A JP 2015548246A JP 6378198 B2 JP6378198 B2 JP 6378198B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- axle
- towed vehicle
- calculated
- soll
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/1701—Braking or traction control means specially adapted for particular types of vehicles
- B60T8/1708—Braking or traction control means specially adapted for particular types of vehicles for lorries or tractor-trailer combinations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/18—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to vehicle weight or load, e.g. load distribution
- B60T8/1887—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to vehicle weight or load, e.g. load distribution especially adapted for tractor-trailer combinations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/1755—Brake regulation specially adapted to control the stability of the vehicle, e.g. taking into account yaw rate or transverse acceleration in a curve
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/176—Brake regulation specially adapted to prevent excessive wheel slip during vehicle deceleration, e.g. ABS
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/176—Brake regulation specially adapted to prevent excessive wheel slip during vehicle deceleration, e.g. ABS
- B60T8/1766—Proportioning of brake forces according to vehicle axle loads, e.g. front to rear of vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/32—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration
- B60T8/72—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration responsive to a difference between a speed condition, e.g. deceleration, and a fixed reference
- B60T8/74—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration responsive to a difference between a speed condition, e.g. deceleration, and a fixed reference sensing a rate of change of velocity
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2240/00—Monitoring, detecting wheel/tire behaviour; counteracting thereof
- B60T2240/06—Wheel load; Wheel lift
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2250/00—Monitoring, detecting, estimating vehicle conditions
- B60T2250/02—Vehicle mass
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Regulating Braking Force (AREA)
- Hydraulic Control Valves For Brake Systems (AREA)
- Vehicle Body Suspensions (AREA)
Description
P−Soll_Z〜BDN_Z*Z−Soll*(Kappa/Kappa_alt).
から算出される。
P−Soll_A〜BDN_A*Z−Soll*(Kappa/Kappa_alt).
から算出される。
Kappa_alt=Kappa
として記憶される。
BDN_Z=4.7bar/g→空の牽引車2、
BDN_Z=8.5bar/g→満積載の牽引車2、
BDN_A=1.9bar/g→空の被牽引車3、
BDN_A=8.5bar/g→満積載の被牽引車3
M_ZFZ=AL_ZVA+AL_ZHA
として既知であり、さらにその車軸荷重比
ALV=AL_ZVA:AL_ZHA
が既知であるからである。その結果、(比例算で)解かれ得る二元連立方程式が形成される。次いで、これらの絶対車軸荷重は、走行動作制御法で使用され得る。
h_ZVA/h_ZHA=4/6
である。この場合、さらに、それらのレバー長さの総和h_ZVA+h_ZHAが、当該牽引車2の車軸距離(ホイールベース)として既知である。その結果、それらのレバー長さh_ZVA及びh_ZHAが算出され得る。
トレーラー連結車の総重量M=28t
ALV=0.65;これは、上記の方法にしたがって算出される。
Kappa=8.5bar/g(中央下の値)
BDN_Z=8.5bar/g(左下の値)
BDN_A=8.5bar/g(右下の値)
に設定することができる。
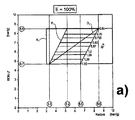
トレーラー連結車1の荷重状態が、上記の独国特許出願公開第10261513号明細書の図3d)のように、すなわち図5c)に応じて存在すると仮定し、当該独国特許出願公開第10261513号明細書の図5c)に応じて、100%の影響係数E及び18tの許容重量TGVWが存在すると仮定する。この場合、1.5の車軸荷重比ALV、6.6bar/gの実際の制動エネルギー基準値Kappa及び28tの重量Mが記憶されてあると仮定する。さらに、EBS制御装置5,105,205,305,405によって計算された牽引車2に対する制動エネルギーレベルBDN_Zが、4.7bar/gと算出されてあり、被牽引車3に対する制動エネルギーレベルBDN_Aが、8.5bar/gと算出されてあると仮定する。
この計算例では、影響係数が、100%に設定されているので、制動エネルギーレベルBDN_Zと車軸荷重比ALVとの間の直接の関係が、図1に示されたグラフにしたがって存在する。すなわち、図11に示された特性曲線BDN_Z=f(ALV)は、車軸荷重AL_ZVA、AL_ZHAの計算のために直接に重要である。
前車軸の車軸荷重 AL_ZVA=TGVW*BDN_Z/8.5bar/g*ALV/(ALV+1)
後車軸の車軸荷重 AL_ZHA=TGVW*BDN_Z/8.5bar/g*1/(ALV+1)
と計算される。
AL_ZVA=6.0t及びAL_ZHA=4.0t
である。
である。
被牽引車3の重量M_AFZは、算出された総重量Mと牽引車2の計算された重量M_AFZとの差であるM_AFZ=M−M_ZFZから計算される。
その結果、
M_AFZ=28.0t−10.0t=18.0tである。
a)当該被牽引車3が、満積載にされていること、及び
b)それぞれ9.0tの車軸荷重AL_AA1、AL_AA2(AA1、AA2)を有する2軸の被牽引車3が存在することが確認される。
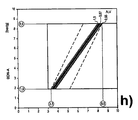
ここでは、上記の独国特許出願公開第10261513号明細書の図5c)に示されているものとお同じであるが、上記の計算例1とは違って、0%の影響係数Eが設定されているトレーラー連結車1の荷重状態が想定される。すなわち、この計算例2では、当該独国特許出願公開第10261513号明細書の図5i)が重要である。
当該計算例2では、影響係数Eが、0%に設定されているので、(当該計算例では7.1bar/gと算出されている)実際に算出された制動エネルギーレベルBDN_Zと車軸荷重比ALVとの間の直接の関係が、図11の関数BDN_Z=f(ALV)にしたがってもはや成立しないが、牽引車2の車軸荷重比ALVは、1.5によって既知である。
M_ZFZ=TGVW*BDN_Z/8.5bar/g=18t*4.7bar/g/8.5bar/g=10.0t
この場合、当該計算中に入力される制動エネルギーレベルBDN_Zは、影響係数E=100%の制動エネルギーレベルBDN_Zである。
前車軸の車軸荷重 AL_ZVA=TGVW*BDN_Z/8.5bar/g*ALV/(ALV+1)
後車軸の車軸荷重 AL_ZHA=TGVW*BDN_Z/8.5bar/g*1/(ALV+1)
と計算される。
AL_ZVA=6.0t及びAL_ZHA=4.0t
である。
被牽引車2の重量M_AFZは、
M_AFZ=M−M_ZFZ=28t−10t=18t
から計算される。
M_AFZ=18.0t
である。
当該荷重状態の計算:この計算例では、18tを有する被牽引車3の算出された重量M_AFZと6.1bar/gを有するこの被牽引車3の算出された制動エネルギーレベルBDN_Aとが、満積載でない被牽引車3を直接的に示唆するものの、当該方法は、この被牽引車3の実際の荷重状態、すなわちより重い荷重状態を一義的に確認することができる。このため、牽引車2の車軸荷重AL_ZHA、AL_ZVAの算出のときと同様に、記憶された複数の特性曲線領域が、当該部分車両2,3の制動エネルギーレベルBDN_A、BDN_Zを算出するために使用される。
18tの被牽引車3の重量M_AFZが、関係式M_AFZ=M−M_ZFZから計算されてある。さらに、被牽引車3だけを制動する必要があるときに、この被牽引車3は、8.5bar/gの制動エネルギーレベルBDN_Aを必要とすることは既知である。このとき、これらの両値の組み合わせから、当該被牽引車3は2軸の被牽引車3であり、この被牽引車3の車軸AA1、AA2が9tの車軸荷重を有することが推論される。
AL_AA1=AL_AA2=1/2+M_AFZ=1/2*18t=9t.
したがって、FDRシステムが、例えば、9tの車軸荷重及び/又は被牽引車軸若しくは被牽引車の正確な満荷重状態を考慮する、被牽引車軸AA1、AA2、AA3に対する車軸に依存する目標圧力FDR_P_Soll_AAを計算できる。
第1クラス:満積載、
第2クラス:半積載、
第3クラス:無積載。
にクラス分けされる。
第4クラス:フロントヘビーな積載、
第5クラス:均衡した/中央の積載、
第6クラス:バックヘビーな積載。
の少なくとも1つのクラスを追加して実行することが考えられる。
2 牽引車
3 被牽引車
4,104,204,304,404 ブレーキ制御装置
5,105,205,305,405 EBS制御装置
6,106,206,306,406 FDR制御装置
7 演算装置
AA1,AA2,AA3 被牽引車3の第1、第2、第3被牽引車軸
ALV 牽引車2の車軸荷重比
AL_ZVA 牽引車2の前車軸の車軸荷重
AL_ZHA 牽引車2の後車軸の車軸荷重
AL_AA1 第1被牽引車軸の車軸荷重
AL_AA2 第2被牽引車軸の車軸荷重
E 影響係数(連結係数)
M 総重量
M_AFZ 牽引車2の重量
M_ZFZ 被牽引車3の重量
z_Soll_FDR 車両減速度目標値
P−Soll−VA,
P−Soll−HA,
P−Soll_A 目標圧力
z_Soll_VA_FDR,
z_Soll_HA_FDR,
z_Soll_A_FDR 車軸減速度目標値
P−Soll_Z,
P−Soll−A ブレーキ圧力目標値
BDN_A 制動エネルギーレベル
SDN_Z 制動エネルギーレベル
Claims (15)
- トレーラー連結車(1)のブレーキを制御するための方法であって、このトレーラー連結車(1)が、電子制御ブレーキシステムを備える、少なくとも1つの前車軸(VA)と1つの後車軸(HA)とを有する牽引車(2)と、少なくとも1つの車軸(AA1,AA2)を有する被牽引車(3)とを持ち、
当該方法では、
・ブレーキの操作時に、減速度目標値(Z−Soll)が、前記牽引車(2)に対する少なくとも1つのブレーキ制御装置(4,104,204,304,404)を使用して算出され、実際の減速度実際値(Z−Ist)と比較され、実際の制動エネルギー基準値(Kappa)が、当該比較から算出され、
・さらに、前記牽引車(2)の制動エネルギー基準値(Kappa)又は車軸荷重比(ALV)に対する前記牽引車(2)と前記被牽引車(3)とのための制動エネルギーレベル(BDN_Z,BDN_A)の依存性を示す記憶された複数の特性曲線領域を使用して、前記牽引車(2)と前記被牽引車(3)とに対する制動エネルギー目標値(P−Soll_Z,P−Soll_A)が、前記少なくとも1つのブレーキ制御装置(4,104,204,304,404)を使用して実際の制動エネルギー基準値(Kappa)と、前記牽引車(2)と前記被牽引車(3)とに対する制動エネルギーレベル(BDN_Z,BDN_A)とから算出され、
前記特性曲線領域が、少なくとも1つの予め設定可能な影響係数(E)に応じて得られる当該方法において、
牽引車(2)、被牽引車(3)、トレーラー連結車(1)のグループから成る車両のうちの1つの車両に対する荷重状態が、前記少なくとも1つのブレーキ制御装置(4,104,204,304,404)を使用して前記制動エネルギー基準値(Kappa)と前記影響係数(E)と前記牽引車(2)の車軸荷重比(ALV)とから確認され、
前記被牽引車(3)が、荷重に依存する固有の自動制動力制御部なしに構成されていて、
前記被牽引車(3)の制動力制御が、前記牽引車(2)によって実行されることを特徴とする方法。 - 前記牽引車(2)の1つの重心位置、前記牽引車(2)1つの車軸荷重(AL_ZVA,AL_ZHA,AL_AVA,AL_AHA)、前記牽引車(2)の複数の車軸荷重(AL_ZVA,AL_ZHA,AL_AVA,AL_AHA)、前記被牽引車(3)の1つの車軸荷重(AL_ZVA,AL_ZHA,AL_AVA,AL_AHA)、前記被牽引車(3)の複数の車軸荷重(AL_ZVA,AL_ZHA,AL_AVA,AL_AHA)のうちの1つの値又は複数の値が、荷重状態として算出されることを特徴とする請求項1に記載の方法。
- 前記牽引車(2)の車軸荷重(AL_ZVA,AL_ZHA)は、前記牽引車(2)の制動エネルギーレベル(BDN_Z)と前記車軸荷重比(ALV)と前記牽引車(2)の許容重量(TGVW)とから算出されることを特徴とする請求項2に記載の方法。
- 前記牽引車(2)の重量(M_ZFZ)と前記被牽引車(3)の重量(M_AFZ)と前記トレーラー連結車(1)の総重量(M)とのうちの1つ又は複数の値が、さらに算出されることを特徴とする請求項1〜3のいずれか1項に記載の方法。
- 前記被牽引車(3)の車軸荷重(AL_AVA,AL_AHA)は、前記被牽引車(3)の制動エネルギーレベル(BDN_A)と前記車軸荷重比(ALV)と前記総重量(M)とから算出されることを特徴とする請求項4に記載の方法。
- 前記トレーラー連結車(1)の全体に対する減速度目標値(Z_Soll)が算出されることを特徴とする請求項1〜5のいずれか1項に記載の方法。
- 車両減速度(z_Soll_FDR)の目標値が、FDR制御装置(6,106,206,306,406)内で算出され、その後にEBS制御装置(5,105,205,305,405)内で使用されることを特徴とする請求項1〜6のいずれか1項に記載の方法。
- 前記牽引車(2)の各車軸(VA,HA)と前記被牽引車(3)の各車軸(AA1,AA2,AA3)とに対して、車軸に関する減速度目標値(z_Soll_VA_FDR,z_Soll_HA_FDR,z_Soll_A_FDR)が、FDR制御装置(6,106,206,306,406)によって算出され、前記EBS制御装置(5,105,205,305,405)に出力されることを特徴とする請求項7に記載の方法。
- 前記車軸(VA,HA,AA1,AA2,AA3)の減速度目標値(z_Soll_VA_FDR,z_Soll_HA_FDR,z_Soll_A_FDR)は、車輪ごとに算出されることを特徴とする請求項8に記載の方法。
- 旋回角度(LW)とヨーレート(GR)と横方向加速度(ay)と縦方向加速度(ax)とのうちの1つ又は複数の値がさらに算入され、個々の車輪の、ブレーキ圧力目標値又は制動エネルギー基準値(Kappa)が、当該値から算出又は制御されることを特徴とする請求項9に記載の方法。
- 前記牽引車(2)の荷重状態と前記被牽引車(3)の荷重状態とが、線形補間によって前記制動エネルギーレベル(BDN_Z,BDN_A)から評価されることを特徴とする請求項1〜10のいずれか1項に記載の方法。
- 牽引車(2)、被牽引車(3)、トレーラー連結車(1)のグループのうちの1つ又は複数の車両に対する個々の車軸の絶対車軸荷重が、それらの重心位置から算出されることを特徴とする請求項1〜11のいずれか1項に記載の方法。
- 牽引車(2)と被牽引車(3)とから構成されるトレーラー連結車(1)のブレーキを制御するための、前記牽引車(2)用のブレーキ制御装置(4,104,204,304,404)において、
前記ブレーキ制御装置(4,104,204,304,404)が、横滑り状態を回避するための及び/又は車輪のスリップを制御するためのFDR制御装置(6,106,206,306,406)と、前記車輪の車輪ブレーキのブレーキ圧力を算出して調整するためのEBS制御装置(5,105,205,305,405)とを有し、
前記FDR制御装置(6,106,206,306,406)が、前記牽引車(2)と前記被牽引車(3)とに対する走行動的目標圧力(FDR_P_Soll_VA,FDR_P_Soll_HA,FDR_P_Soll_A)を別々に算出し、前記EBS制御装置(5,105,205,305,405)に出力し、
前記被牽引車(3)が、荷重に依存する固有の自動の制動力制御部なしに構成されていて、それぞれの車軸(VA,HA,AA1,AA2,AA3)に対する前記走行動的目標圧力(FDR_P_Soll_VA,FDR_P_Soll_HA,FDR_P_Soll_A)が、前記それぞれの車軸(VA,HA,AA1,AA2,AA3)の荷重状態に応じて設定され、この荷重状態は、制動エネルギー基準値(Kappa)と影響係数(E)と前記牽引車(2)の車軸荷重比(ALV)とから確認される当該ブレーキ制御装置(4,104,204,304,404)。 - 前記FDR制御装置(6,106,206,306,406)は、前記牽引車(2)と前記被牽引車(3)との個々の車軸(VA,HA,AA1,AA2,AA3)に対する走行動的制御目標ブレーキ圧力(P_Soll_Z)を別々に算出し、前記EBS制御装置(5,105,205,305,405)に出力することを特徴とする請求項13に記載のブレーキ制御装置(4,104,204,304,404)。
- 少なくとも1つの前車軸(VA)と1つの後車軸(HA)とを有する牽引車(2)と、少なくとも1つの被牽引車軸(AA1,AA2,AA3)を有する被牽引車(3)とを備えるトレーラー連結車(1)において、
前記牽引車(2)が、請求項13又は14に記載のブレーキ制御装置(4,104,204,304,404)を有する当該トレーラー連結車(1)。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102012024981.0A DE102012024981A1 (de) | 2012-12-20 | 2012-12-20 | Verfahren zur Bremsregelung einer Fahrzeugkombination und Brems-Steuereinrichtung für ein Zugfahrzeug |
| DE102012024981.0 | 2012-12-20 | ||
| PCT/EP2013/003421 WO2014094944A1 (de) | 2012-12-20 | 2013-11-14 | Verfahren zur bremsregelung einer fahrzeugkombination und bremssteuereinrichtung für ein zugfahrzeug |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016504233A JP2016504233A (ja) | 2016-02-12 |
| JP2016504233A5 JP2016504233A5 (ja) | 2018-05-31 |
| JP6378198B2 true JP6378198B2 (ja) | 2018-08-22 |
Family
ID=49626894
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015548246A Active JP6378198B2 (ja) | 2012-12-20 | 2013-11-14 | トレーラー連結車のブレーキを制御するための方法及び牽引車用のブレーキ制御装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9216721B2 (ja) |
| JP (1) | JP6378198B2 (ja) |
| KR (1) | KR102115415B1 (ja) |
| CN (1) | CN104870273B (ja) |
| DE (1) | DE102012024981A1 (ja) |
| WO (1) | WO2014094944A1 (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2506599A (en) * | 2012-10-02 | 2014-04-09 | Bentley Motors Ltd | An adaptive brake assistance system that adapts the braking assistance in response to environmental and vehicle inputs |
| KR101612759B1 (ko) * | 2015-02-13 | 2016-04-21 | 주식회사 만도 | 제동 장치의 제어 장치 및 그 제어 방법 |
| DE102015006738A1 (de) * | 2015-05-23 | 2016-11-24 | Wabco Gmbh | Verfahren und Vorrichtung zum elektronischen Regeln einer Fahrzeugverzögerung in einem ABS-Bremssystem |
| CN105015524B (zh) | 2015-07-09 | 2017-11-10 | 中车株洲电力机车研究所有限公司 | 一种多辆编组列车制动力分配方法及系统 |
| US10189472B2 (en) * | 2016-04-13 | 2019-01-29 | Ford Global Technologies, Llc | Smart trailer classification system |
| DE102016010461A1 (de) * | 2016-08-31 | 2018-03-01 | Wabco Gmbh | Verfahren zum elektronischen Steuern einer Bremsanlage in einem automatisiert steuerbaren Nutzfahrzeug-Gespann sowie elektronisch steuerbare Bremsanlage in einem automatisiert steuerbaren Nutzfahrzeug-Gespann |
| US10500975B1 (en) * | 2016-09-30 | 2019-12-10 | Hyliion Inc. | Vehicle weight estimation system and related methods |
| JP6816598B2 (ja) * | 2017-03-23 | 2021-01-20 | 株式会社アドヴィックス | 牽引車両の運動制御装置 |
| SE541394C8 (en) * | 2017-12-22 | 2019-12-03 | Scania Cv Ab | Method and a control arrangement for controlling vehicle operation comprising axle load control of at least one vehicle during vehicle operation |
| DE102018001695A1 (de) * | 2018-03-03 | 2019-09-05 | Wabco Gmbh | Verfahren zur Bremssteuerung eines Fahrzeugzuges sowie derart betreibbarer Fahrzeugzug |
| DE102019105927B4 (de) * | 2019-03-08 | 2023-05-11 | Knorr-Bremse Systeme für Nutzfahrzeuge GmbH | System und Verfahren zum Feststellen einer Beladungsänderung eines Nutzfahrzeuges |
| US11318920B2 (en) * | 2020-02-28 | 2022-05-03 | Bendix Commercial Vehicle Systems Llc | Brake controller storing deceleration profiles and method using deceleration profiles stored in a brake controller |
| CN112498556B (zh) * | 2020-12-08 | 2022-10-14 | 摩拜(北京)信息技术有限公司 | 电动自行车的刹车控制方法及电动自行车 |
| WO2023096601A1 (en) * | 2021-11-24 | 2023-06-01 | Hema Endustri Anonim Sirketi | A control unit for tractors |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4007360A1 (de) | 1990-03-08 | 1991-09-12 | Daimler Benz Ag | Verfahren zur bremsdruckverteilung auf die achsen eines kraftfahrzeugs mit abs-druckmittelbremse |
| DE19513509C2 (de) * | 1995-04-10 | 2000-07-13 | Daimler Chrysler Ag | Verfahren zur Bestimmung des Verhältnisses zwischen der Masse eines Fahrzeugzuges und der Masse des Zugfahrzeugs |
| DE19519768C2 (de) * | 1995-05-30 | 1997-05-28 | Knorr Bremse Systeme | Verfahren und Vorrichtung zum Einstellen der Bremskraft eines Anhängers eines aus einem Zugfahrzeug und mindestens einem Anhänger bestehenden Fahrzeugverbundes |
| JPH10129461A (ja) * | 1996-10-25 | 1998-05-19 | J K C Toratsuku Brake Syst:Kk | トラクタ・トレーラのブレーキ制御装置 |
| DE19859966A1 (de) * | 1998-12-29 | 2000-07-13 | Bosch Gmbh Robert | Vorrichtung und Verfahren zur Stabilisierung eines Fahrzeuges |
| DE10261547A1 (de) * | 2002-12-23 | 2004-07-08 | Wabco Gmbh & Co. Ohg | Verfahren zur Zuspannenergieregelung einer Fahrzeugkombination |
| DE10261513B4 (de) | 2002-12-23 | 2013-02-07 | Wabco Gmbh | Verfahren zur Zuspannenergieregelung einer Fahrzeugkombination |
| DE10311838A1 (de) * | 2003-03-18 | 2004-10-21 | Wabco Gmbh & Co. Ohg | Verfahren zur Vermeidung des Umkippens eines Fahrzeugzuges |
| DE102006029367A1 (de) * | 2006-06-27 | 2008-01-03 | Robert Bosch Gmbh | Verfahren und Steuergerät zur Erkennung eines Anhängerbetriebs bei einem Zugfahrzeug |
| US9834187B2 (en) * | 2007-01-11 | 2017-12-05 | Ford Global Technologies, Llc | Trailer sway control with trailer brake intervention |
| DE102007020881B4 (de) * | 2007-01-12 | 2016-06-30 | Knorr-Bremse Systeme für Nutzfahrzeuge GmbH | Elektronisch geregelte Bremsvorrichtung einer Zugfahrzeug-Anhängerkombination |
| DE102007024310A1 (de) * | 2007-05-24 | 2008-11-27 | Wabco Gmbh | Verfahren zur Beurteilung der Kompatibilität von Bremsanlagen einer Fahrzeugkombination und Vorrichtung zur Beurteilung der Kompatibilität |
| DE102008022026A1 (de) * | 2008-05-02 | 2009-11-05 | Wabco Gmbh | EBS-System für Deichselanhänger |
| DE102011017018B3 (de) * | 2011-04-14 | 2012-07-12 | Daimler Ag | Verfahren zur Lastabhängigen Bremsdruckregelung |
-
2012
- 2012-12-20 DE DE102012024981.0A patent/DE102012024981A1/de active Pending
-
2013
- 2013-11-14 JP JP2015548246A patent/JP6378198B2/ja active Active
- 2013-11-14 WO PCT/EP2013/003421 patent/WO2014094944A1/de active Application Filing
- 2013-11-14 KR KR1020157014533A patent/KR102115415B1/ko active IP Right Grant
- 2013-11-14 CN CN201380066031.0A patent/CN104870273B/zh active Active
- 2013-12-12 US US14/104,181 patent/US9216721B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20140180555A1 (en) | 2014-06-26 |
| DE102012024981A1 (de) | 2014-06-26 |
| KR102115415B1 (ko) | 2020-05-27 |
| CN104870273A (zh) | 2015-08-26 |
| WO2014094944A1 (de) | 2014-06-26 |
| CN104870273B (zh) | 2017-09-15 |
| JP2016504233A (ja) | 2016-02-12 |
| US9216721B2 (en) | 2015-12-22 |
| KR20150100650A (ko) | 2015-09-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6378198B2 (ja) | トレーラー連結車のブレーキを制御するための方法及び牽引車用のブレーキ制御装置 | |
| CN108473117B (zh) | 用于预测地防止车辆倾翻的方法 | |
| US10392023B2 (en) | System and method for determining whether a trailer is attached to a vehicle | |
| AU600215B2 (en) | Tractor-trailer brake control system | |
| US8483911B2 (en) | Method and system for controlling vehicle stability | |
| US8267485B2 (en) | Electronic braking system and method for drawbar trailers | |
| US9592800B2 (en) | Towing vehicle controller providing brake control to a towed vehicle and method | |
| US6311111B1 (en) | Method and device for detecting motor vehicle tilt | |
| US9950702B2 (en) | Method for stabilizing the driving behavior of a tractor-trailer combination and vehicle movement dynamics control device | |
| US7413266B2 (en) | Method for controlling the brake system of a vehicle train | |
| US7134733B2 (en) | Method and system for controlling brake-application energy in a vehicle combination | |
| US5615931A (en) | Method and apparatus for regulating the brake system of a vehicle | |
| US6324447B1 (en) | Process and device for stabilizing a vehicle on the basis of a determined torsional value | |
| JP6689372B2 (ja) | 自動車のブレーキ圧力を調整するための方法、その方法を実施するためのブレーキ装置、及びそのようなブレーキ装置を備えた自動車 | |
| EP0292687B1 (en) | Tractor-trailer brake control system | |
| JP2004519372A (ja) | 車両の安定化方法及び装置 | |
| JPH06219255A (ja) | 連結車を制動する方法 | |
| SE530440C2 (sv) | Metod och inrättning för mätning och uppskattning av en bromsfaktor i ett fordons bromssystem | |
| JP6830488B2 (ja) | 自動車の圧縮空気式に操作される複数の車輪ブレーキに対するブレーキ圧力を調整するための方法、当該方法を実行するためのブレーキ装置、及び自動車 | |
| KR20150098664A (ko) | 연결 차량의 브레이크-적용 에너지 제어 방법, ebs 제어 유니트, 및 연결 차량 | |
| EP0288866B1 (en) | Tractor-trailer brake control system | |
| CN111434543A (zh) | 用于作业机械的制动设备 | |
| JP2010188801A (ja) | 車両の重心位置推定装置 | |
| CN102458950B (zh) | 用于产生作用于机动车的车轮的力矩差的方法 | |
| JP2007245766A (ja) | タイヤの摩擦状態判定装置、abs装置、車両挙動制御装置及び自動車並びにタイヤの摩擦状態判定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161110 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171010 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171018 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20180115 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20180315 |
|
| A524 | Written submission of copy of amendment under article 19 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20180412 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180413 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180516 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180608 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180627 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180726 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6378198 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |