JP6351968B2 - 自動水滴測定及び氷検出システム - Google Patents
自動水滴測定及び氷検出システム Download PDFInfo
- Publication number
- JP6351968B2 JP6351968B2 JP2013261637A JP2013261637A JP6351968B2 JP 6351968 B2 JP6351968 B2 JP 6351968B2 JP 2013261637 A JP2013261637 A JP 2013261637A JP 2013261637 A JP2013261637 A JP 2013261637A JP 6351968 B2 JP6351968 B2 JP 6351968B2
- Authority
- JP
- Japan
- Prior art keywords
- aircraft
- icing
- probe
- probes
- housing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 title claims description 133
- 238000001514 detection method Methods 0.000 title claims description 29
- 238000005259 measurement Methods 0.000 title description 6
- 239000000523 sample Substances 0.000 claims description 178
- 238000000034 method Methods 0.000 claims description 36
- 239000000853 adhesive Substances 0.000 claims description 32
- 230000001070 adhesive effect Effects 0.000 claims description 32
- 230000009471 action Effects 0.000 claims description 7
- 230000004044 response Effects 0.000 claims description 4
- 238000002844 melting Methods 0.000 claims description 3
- 230000008018 melting Effects 0.000 claims description 3
- -1 polytetrafluoroethylene Polymers 0.000 claims description 2
- 229920001343 polytetrafluoroethylene Polymers 0.000 claims description 2
- 239000004810 polytetrafluoroethylene Substances 0.000 claims description 2
- 239000011347 resin Substances 0.000 claims description 2
- 229920005989 resin Polymers 0.000 claims description 2
- 229920002379 silicone rubber Polymers 0.000 claims description 2
- 239000004945 silicone rubber Substances 0.000 claims description 2
- 238000010586 diagram Methods 0.000 description 15
- 230000008569 process Effects 0.000 description 14
- 239000000463 material Substances 0.000 description 8
- 239000007788 liquid Substances 0.000 description 7
- 239000003381 stabilizer Substances 0.000 description 6
- 238000004458 analytical method Methods 0.000 description 5
- 230000003213 activating effect Effects 0.000 description 4
- 238000003491 array Methods 0.000 description 3
- 230000015572 biosynthetic process Effects 0.000 description 3
- 239000013526 supercooled liquid Substances 0.000 description 2
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 238000005260 corrosion Methods 0.000 description 1
- 230000007797 corrosion Effects 0.000 description 1
- 230000001351 cycling effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000002194 freeze distillation Methods 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 230000000977 initiatory effect Effects 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000010257 thawing Methods 0.000 description 1
- 239000010936 titanium Substances 0.000 description 1
- 229910052719 titanium Inorganic materials 0.000 description 1
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D15/00—De-icing or preventing icing on exterior surfaces of aircraft
- B64D15/20—Means for detecting icing or initiating de-icing
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N1/00—Sampling; Preparing specimens for investigation
- G01N1/02—Devices for withdrawing samples
- G01N1/22—Devices for withdrawing samples in the gaseous state
- G01N1/2202—Devices for withdrawing samples in the gaseous state involving separation of sample components during sampling
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N1/00—Sampling; Preparing specimens for investigation
- G01N1/02—Devices for withdrawing samples
- G01N1/22—Devices for withdrawing samples in the gaseous state
- G01N1/2202—Devices for withdrawing samples in the gaseous state involving separation of sample components during sampling
- G01N1/2214—Devices for withdrawing samples in the gaseous state involving separation of sample components during sampling by sorption
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N15/02—Investigating particle size or size distribution
- G01N15/0205—Investigating particle size or size distribution by optical means
- G01N15/0227—Investigating particle size or size distribution by optical means using imaging; using holography
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D15/00—De-icing or preventing icing on exterior surfaces of aircraft
- B64D15/20—Means for detecting icing or initiating de-icing
- B64D15/22—Automatic initiation by icing detector
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N1/00—Sampling; Preparing specimens for investigation
- G01N1/28—Preparing specimens for investigation including physical details of (bio-)chemical methods covered elsewhere, e.g. G01N33/50, C12Q
- G01N1/2813—Producing thin layers of samples on a substrate, e.g. smearing, spinning-on
- G01N2001/2833—Collecting samples on a sticky, tacky, adhesive surface
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B19/00—Alarms responsive to two or more different undesired or abnormal conditions, e.g. burglary and fire, abnormal temperature and abnormal rate of flow
- G08B19/02—Alarm responsive to formation or anticipated formation of ice
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Engineering & Computer Science (AREA)
- Biochemistry (AREA)
- Physics & Mathematics (AREA)
- Analytical Chemistry (AREA)
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Biomedical Technology (AREA)
- Molecular Biology (AREA)
- Aviation & Aerospace Engineering (AREA)
- Dispersion Chemistry (AREA)
- Investigating Or Analysing Materials By Optical Means (AREA)
- Sampling And Sample Adjustment (AREA)
Description
航空機の外側の大気から水滴を集め、集められた水滴の任意の数の画像を生成するように構成されたセンサシステム、及び
センサから任意の数の画像を使用して航空機の任意の数の種類の着氷状態の存在を検出するように構成された着氷状態検出器
を備える装置。
着氷状態検出器は、少なくとも第一の種類の着氷状態又は第二の種類の着氷状態の存在を検出することに応じて動作を実行するようにさらに構成される、第1条項に記載の装置。
動作は、警告を生成すること、防氷システムを起動すること、ログエントリーを生成すること、及び報告を送信することのうちの少なくとも一つから選択される、第2条項に記載の装置。
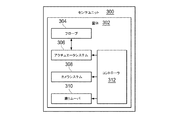
センサシステムは、
航空機の外側の大気から水滴を集めるように構成された任意の数のプローブ、及び
任意の数のプローブにより集められた水滴の任意の数の画像を生成するように構成されたカメラシステム
を備える、第1条項に記載の装置。
任意の数のプローブは、航空機の外側の大気に延出し、任意の数のプローブを航空機の外側の大気から航空機の内側へ後退するように構成される、第4条項に記載の装置。
任意の数のプローブは、周期的に航空機の外側の大気に延出し、航空機の外側の大気から後退するように構成される、第5条項に記載の装置。
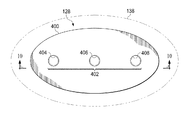
筐体であって、カメラシステムは筐体内部に配置され、任意の数のプローブは、筐体から航空機の外側の大気へ延出し、航空機の外側の大気から筐体へ後退するように構成される、筐体、及び
任意の数のプローブを移動させ、筐体から航空機の外側の大気に延出し、航空機の外側の大気から筐体へ後退するように構成されたモーターシステム
をさらに備える、第5条項に記載の装置。
着氷状態検出器は、集められた水滴が氷結した水滴であるときに、航空機の着氷状態の種類を特定するために任意の数の画像を解析するように構成される、第5条項に記載の装置。
着氷状態検出器は、カメラシステム、筐体、及び航空機のコンピュータシステムのうちの一つに配置される、第8条項に記載の装置。
着氷状態検出器は、集められた水滴が氷結した水滴であるときには、任意の数の画像の氷結した水滴のサイズを氷結した水滴についての滴サイズの滴データベースと比較することにより、任意の数の画像を解析し航空機の着氷状態の種類を特定するように構成される、第8条項に記載の装置。
任意の数の種類の着氷状態は、第一の種類の着氷状態及び第二の種類の着氷状態を含む、第1条項に記載の装置。
第一の種類の着氷状態は、直径約0.00465ミリメートルから直径約0.111ミリメートルの第一の任意の数のサイズを有する第一の滴により発生し、前記第二の種類の着氷状態は、直径約0.112ミリメートルから直径約2.2ミリメートルの第二の任意の数のサイズを有する第二の滴により発生する、第11条項に記載の装置。
第二の種類の着氷状態は、過冷却された大きな滴種類の着氷状態である、第11条項に記載の装置。
航空機の外部で任意の数の種類の着氷状態についての情報を生成するように構成されたセンサユニット群であって、センサユニット群の一つのセンサユニットは、航空機の外側の大気から水滴を集めるように構成された任意の数のプローブ、及び任意の数のプローブにより集められた水滴の任意の数の画像を生成するように構成されたカメラシステムを備える、センサユニット群、及び
カメラシステムから任意の数の画像を使用して航空機の任意の数の種類の着氷状態の存在を検出するように構成された着氷状態検出器
を備える、着氷状態検出システム。
任意の数の種類の着氷状態が存在するときには、航空機の表面から氷を除去するように構成された防氷システム
をさらに備える、第14条項に記載の着氷状態検出システム。
着氷状態を検出するための方法であって、
航空機の外側の大気から水滴を集めること、
集められた水滴の任意の数の画像を生成すること、及び
センサシステムから任意の数の画像を使用して、航空機の任意の数の種類の着氷状態が存在するかどうかを判定すること
を含む、方法。
任意の数の種類の着氷状態が存在するときに動作を実行すること
をさらに含む、第16条項に記載の方法。
集めるステップは、航空機の外側の大気に延出し、航空機の外側の大気から航空機の内側へ後退するように任意の数のプローブを移動させることを含み、かつ
生成するステップは、任意の数のプローブが航空機の外側の大気から航空機の内側に後退するときに、氷結した水滴として任意の数のプローブで集められた水滴の画像を生成することを含む、第16条項に記載の方法。
集めるステップは、
画像を生成した後で、かつ航空機の外側の大気に再び延出するように任意の数のプローブを移動させる前に、氷結した水滴を融解させること
をさらに含む、第18条項に記載の方法。
判定するステップは、
第一の種類の着氷状態と第二の種類の着氷状態とを区別すること
を含む、第16条項に記載の方法。
また、本願は以下に記載する態様を含む。
(態様1)
航空機(100)の外側の大気から水滴(222)を集め、集められた水滴(222)の任意の数の画像(224)を生成するように構成されたセンサシステム(206)、及び
センサシステム(206)から任意の数の画像(224)を使用して航空機(100)についての任意の数の種類の着氷状態(210)の存在を検出するように構成された着氷状態検出器(208)
を備える装置。
(態様2)
着氷状態検出器(208)は、少なくとも第一の種類の着氷状態又は第二の種類の着氷状態の存在の検出に応じて動作を実行する(1206)ようにさらに構成される、態様1に記載の装置。
(態様3)
動作は、警告を生成すること、防氷システムを起動すること、ログエントリーを生成すること、及び報告を送信することのうちの少なくとも一つから選択される、態様1又は2に記載の装置。
(態様4)
センサシステム(206)は、
航空機(100)の外側の大気から水滴(222)を集めるように構成された任意の数のプローブ(304)、及び
任意の数のプローブ(304)により集められた水滴(222)の任意の数の画像(224)を生成するように構成されたカメラシステム(308)
を備える、態様1〜3のいずれか一項に記載の装置。
(態様5)
任意の数のプローブ(304)は、航空機(100)の外側の大気に延出し、任意の数のプローブ(304)を航空機(100)の外側の大気から航空機(100)の内側へ後退するように構成される、態様1〜4のいずれか一項に記載の装置。
(態様6)
任意の数のプローブ(304)は、周期的に航空機(100)の外側の大気に延出し、航空機(100)の外側の大気から後退するように構成される、態様1〜5のいずれか一項に記載の装置。
(態様7)
筐体(302、400)であって、カメラシステム(308、1014)が筐体(302)内部に配置され、任意の数のプローブ(304)が、筐体(302、400)から航空機(100)の外側の大気に延出し、航空機(100)の外側の大気から筐体(302、400)に後退するように構成される、筐体(302、400)、及び
任意の数のプローブ(304)を移動させ、筐体(302、400)から航空機(100)の外側の大気に延出し、航空機(100)の外側の大気から筐体(302、400)へ後退するように構成されたモーターシステム
をさらに備える、態様5に記載の装置。
(態様8)
着氷状態検出器(208)は、集められた水滴(222)が氷結した水滴(228)であるときには、任意の数の画像(224)の氷結した水滴(228)のサイズを氷結した水滴(228)についての滴サイズ(225)の滴データベース(236)と比較することにより、任意の数の画像(224)を解析して航空機(100)についての着氷状態の種類を特定するように構成される、態様5に記載の装置。
(態様9)
着氷状態検出器(208)は、カメラシステム(308、1014)、筐体(302)、及び航空機(100)のコンピュータシステムのうちの一つに配置される、態様8に記載の装置。
(態様10)
第一の種類の着氷状態は、直径約0.00465ミリメートルから直径0.111ミリメートルの第一の任意の数のサイズ(225)を有する第一の滴(222)により発生し、第二の種類の着氷状態は、直径約0.112ミリメートルから直径約2.2ミリメートルの第二の任意の数のサイズ(225)を有する第二の滴(222)により発生する、態様2に記載の装置。
(態様11)
センサユニット(124、216)群であって、センサユニット(124、216)群のセンサユニット(128、130、300)は、航空機(100)の外側の大気から水滴を集めるように構成された任意の数のプローブ(304)、及び任意の数のプローブ(304)により集められた水滴(222)の任意の数の画像(224)を生成するように構成されたカメラシステム(308、1014)を備える、センサユニット(124、216)群、並びに
任意の数の種類の着氷状態(210)が存在するときには、航空機(100)の表面から氷を除去するように構成された防氷システム(226)
をさらに備える、態様1に記載の装置。
(態様12)
着氷状態を検出するための方法であって、
航空機(100)の外側の大気から水滴(222)を集めること、
集められた水滴(222)の任意の数の画像(224)を生成すること、及び
センサシステム(206)から任意の数の画像(224)を使用して航空機(100)についての任意の数の種類の着氷状態(210)が存在するかどうかを判定すること、
を含む方法。
(態様13)
任意の数の種類の着氷状態(210)が存在するときには動作を実行すること(1206)
をさらに含む、態様12に記載の方法。
(態様14)
集めるステップは、航空機(100)の外側の大気に延出し、航空機(100)の外側の大気から航空機(100)の内側へ後退するように任意の数のプローブ(304)を移動させることを含み、
生成するステップは、任意の数のプローブ(304)が航空機(100)の外側の大気から航空機(100)の内側に後退するときには、氷結した水滴(228)として任意の数のプローブ(304)で集められた水滴(222)の画像(224)を生成することを含む、態様12又は13に記載の方法。
(態様15)
集めるステップは、画像(224)を生成した後で、かつ航空機(100)の外側の大気に再び延出するように任意の数のプローブ(304)を移動させる前に、氷結した水滴(228)を融解させることをさらに含む、態様14に記載の方法。
102、104 翼
106 機体
108、110 エンジン
112 機首部分
114 尾部
116、118 水平安定板
120 垂直安定板
122 着氷状態検出システム
124、128、130、134 センサユニット
126 表面
134 側面
136 水平中心線
138 場所
400 筐体
402、404、406、408 ポート
500 プローブ
502 粘着性部分
600、602 プローブ
606 粘着性部分
802 プローブ
808 粘着性部分
1000、1002、1004 アクチュエータ
1006 コントローラ
1008、1010、1012 滴リムーバ
1014 カメラシステム
Claims (13)
- 航空機(100)の外側の大気から水滴(222)を集めるように構成された粘着性部分(502)を各々が有する任意の数のプローブ(304)を有し、集められた前記水滴(222)の任意の数の画像(224)を生成するように構成されたセンサシステム(206)であって、前記センサシステム(206)は前記任意の数のプローブ(304)により集められた前記水滴(222)の前記任意の数の画像(224)を生成するように構成されたカメラシステム(308)を有し、前記任意の数のプローブ(304)は、前記航空機(100)の前記外側の前記大気に延出し、前記航空機(100)の前記外側の前記大気から前記航空機(100)の内側へ後退するように構成される、センサシステム(206)と、
着氷状態検出器(208)であって、前記センサシステム(206)からの前記任意の数の画像(224)を使用して、航空機(100)についての任意の数の着氷状態の種類の存在を検出し、集められた前記水滴(222)が氷結した水滴(228)であるときには、前記任意の数の画像(224)の前記氷結した水滴(228)のサイズを氷結した水滴(228)についての滴サイズ(225)の滴データベース(236)と比較することにより、前記任意の数の画像(224)を解析して前記航空機(100)についての第一種類の着氷状態と第二種類の着氷状態とを特定するように構成された着氷状態検出器(208)とを備え、
前記第二種類の着氷状態が過冷却された大きな粒の着氷状態である、装置。 - 前記着氷状態検出器(208)は、少なくとも前記第一種類の着氷状態又は前記第二種類の着氷状態の存在の検出に応じて動作を実行する(1206)ようにさらに構成される、請求項1に記載の装置。
- 前記動作は、警告を生成すること、防氷システムを起動すること、ログエントリーを生成すること、及び報告を送信することのうちの少なくとも一つから選択される、請求項2に記載の装置。
- 前記任意の数のプローブ(304)は、周期的に、前記航空機(100)の前記外側の大気に延出し、前記航空機(100)の前記外側の大気から後退するように構成される、請求項1から3のいずれか一項に記載の装置。
- 筐体(302、400)であって、前記カメラシステム(308、1014)が筐体(302)内部に配置され、前記任意の数のプローブ(304)が、前記筐体(302、400)から前記航空機(100)の前記外側の大気に延出し、前記航空機(100)の前記外側の大気から前記筐体(302、400)に後退するように構成される、前記筐体(302、400)、及び
任意の数のプローブ(304)を移動させ、前記筐体(302、400)から前記航空機(100)の前記外側の大気に延出し、前記航空機(100)の前記外側の大気から前記筐体(302、400)へ後退するように構成されたモーターシステム
をさらに備える、請求項1から4のいずれか一項に記載の装置。 - 前記着氷状態検出器(208)は、前記カメラシステム(308、1014)、筐体(302)、及び前記航空機(100)のコンピュータシステムのうちの一つに配置される、請求項1から5のいずれか一項に記載の装置。
- 前記第一種類の着氷状態は、直径約0.00465ミリメートルから直径約0.111ミリメートルの第一の任意の数のサイズ(225)を有する第一の滴(222)により発生し、前記第二種類の着氷状態は、直径約0.112ミリメートルから直径約2.2ミリメートルの第二の任意の数のサイズ(225)を有する第二の滴(222)により発生する、請求項1から6のいずれか一項に記載の装置。
- 任意の数の種類の着氷状態(210)が存在するときには、航空機(100)の表面から氷を除去するように構成された防氷システム(226)
をさらに備える、請求項1から7のいずれか一項に記載の装置。 - 前記粘着性部分(502)は、シリコンゴム、ポリテトラフルオロエチレン、油性又は蝋製の樹脂のうち1または複数を含む、請求項1から8のいずれか一項に記載の装置に記載の装置。
- 着氷状態を検出するための方法であって、
それぞれが粘着性部分(502)を有する任意の数のプローブ(304)を用いて、航空機(100)の外側の大気から水滴(222)を集めることと、
前記任意の数のプローブ(304)を動かして、前記航空機(100)の前記外側の前記大気に延出し、前記航空機(100)の前記外側の前記大気から前記航空機(100)の内側へ後退することと、
カメラシステム(308)を利用して、前記任意の数のプローブ(304)が前記航空機(100)の前記外側の前記大気から前記航空機(100)の前記内側へ後退されたとき、前記任意の数のプローブ(304)上に氷結された水滴(228)として集められた前記水滴の任意の数の画像(224)を生成することと、
センサシステム(206)からの前記任意の数の画像(224)を使用して前記航空機(100)についての任意の数の種類の着氷状態(210)が存在するかどうかを判定することと、
集められた前記水滴(222)が氷結した水滴(228)であるときには、前記任意の数の画像(224)の前記氷結した水滴(228)のサイズを氷結した水滴(228)についての滴サイズ(225)の滴データベース(236)と比較することにより、前記任意の数の画像(224)を解析して前記航空機(100)についての第一種類の着氷状態と第二種類の着氷状態とを特定し、前記第二種類の着氷状態が過冷却された大きな粒の着氷状態である、解析することと、
を含む方法。 - 前記任意の数の種類の着氷状態(210)が存在するときには動作を実行すること(1206)をさらに含む、請求項10に記載の方法。
- 前記集めることは、前記画像(224)を生成した後で、かつ前記航空機(100)の前記外側の大気に再び延出するように前記任意の数のプローブ(304)を移動させる前に、前記氷結した水滴(228)を融解させることをさらに含む、請求項10または11に記載の方法。
- 前記判定することは、第一種類の着氷状態と第二種類の着氷状態とを区別することを含む、請求項10から12のいずれか一項に記載の方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/732,707 | 2013-01-02 | ||
| US13/732,707 US9227733B2 (en) | 2013-01-02 | 2013-01-02 | Automated water drop measurement and ice detection system |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014131906A JP2014131906A (ja) | 2014-07-17 |
| JP2014131906A5 JP2014131906A5 (ja) | 2017-01-26 |
| JP6351968B2 true JP6351968B2 (ja) | 2018-07-04 |
Family
ID=49955126
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013261637A Active JP6351968B2 (ja) | 2013-01-02 | 2013-12-18 | 自動水滴測定及び氷検出システム |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US9227733B2 (ja) |
| EP (1) | EP2774851B1 (ja) |
| JP (1) | JP6351968B2 (ja) |
| CN (1) | CN103910062B (ja) |
| BR (1) | BR102013033738B1 (ja) |
| CA (1) | CA2829887C (ja) |
| RU (1) | RU2586914C2 (ja) |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102336272B (zh) * | 2010-07-16 | 2015-01-14 | 中国商用飞机有限责任公司 | 结冰探测器探头及包括该探头的结冰探测器 |
| IL230706B (en) | 2014-01-29 | 2019-02-28 | Levkovitch Michael | Ice detection device |
| KR101710161B1 (ko) * | 2014-12-12 | 2017-02-24 | 한국항공우주산업 주식회사 | 회전익 항공기 결빙 시험장치 |
| US20160376010A1 (en) * | 2015-06-26 | 2016-12-29 | Rosemount Aerospace Inc. | Systems and methods for preventing ice accumulation |
| CN105644791B (zh) * | 2015-08-31 | 2018-06-22 | 中国商用飞机有限责任公司 | 结冰探测系统及具有该结冰系统的飞行器 |
| US10737793B2 (en) * | 2015-12-02 | 2020-08-11 | The Boeing Company | Aircraft ice detection systems and methods |
| CN105865100B (zh) * | 2016-04-05 | 2018-03-16 | 北京航空航天大学 | 一种样件弹射式过冷液滴撞击微观观测系统 |
| CN105891206B (zh) * | 2016-04-05 | 2018-07-24 | 北京航空航天大学 | 一种可控的过冷液滴连续撞击微观观测系统 |
| GB201608945D0 (en) * | 2016-05-20 | 2016-07-06 | Gkn Aerospace Services Ltd | Ice accretion apparatus |
| CN105882978B (zh) * | 2016-06-24 | 2017-10-13 | 北京航空航天大学 | 一种采用喷射头喷射结冰凝结核及除冰液的直升机旋翼防/除冰方法 |
| US10124900B2 (en) | 2016-06-28 | 2018-11-13 | Rosemount Aerospace Inc. | Automated super-cooled water-droplet size differentiation using aircraft accretion patterns |
| CN107132278B (zh) * | 2017-06-07 | 2023-04-07 | 中国空气动力研究与发展中心低速空气动力研究所 | 一种多圆柱阵列结冰探测方法 |
| IL253739B (en) * | 2017-07-31 | 2021-01-31 | Israel Aerospace Ind Ltd | Baldness detector |
| US20190039742A1 (en) * | 2017-08-01 | 2019-02-07 | Honeywell International Inc. | Managing response to icing threat |
| CN107697287B (zh) * | 2017-10-23 | 2023-05-09 | 天津飞眼无人机科技有限公司 | 一种水空两用交通工具的控制系统 |
| CN109903632A (zh) * | 2019-04-18 | 2019-06-18 | 哈尔滨工程大学 | 一种对流条件下水滴撞击冷壁面结冰过程可视化实验平台 |
| CN110127061A (zh) * | 2019-05-13 | 2019-08-16 | 成都凯天电子股份有限公司 | 提高结冰探测器探测杆敏感度的方法 |
| CN110077601A (zh) * | 2019-05-16 | 2019-08-02 | 中国商用飞机有限责任公司 | 过冷水滴结冰探测器和混合态结冰探测器 |
| CN112507572B (zh) * | 2021-02-07 | 2021-04-30 | 中国空气动力研究与发展中心低速空气动力研究所 | 一种过冷大水滴结冰条件的优化匹配评估方法 |
| CN114152365B (zh) * | 2022-02-07 | 2022-04-12 | 中国空气动力研究与发展中心低速空气动力研究所 | 一种临界防冰保护的光纤结冰传感器、系统和方法 |
| US11912420B2 (en) * | 2022-04-11 | 2024-02-27 | The Boeing Company | Deicing systems and methods for an aircraft |
| CN115248022B (zh) * | 2022-09-22 | 2022-12-06 | 四川大学 | 一种输电线路的结冰厚度检测方法 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10261064A (ja) * | 1997-03-17 | 1998-09-29 | Mitsuba Corp | 雨滴検出装置における付着物識別方法 |
| JP4257627B2 (ja) * | 1999-11-19 | 2009-04-22 | 日本精機株式会社 | 雨滴検出装置 |
| US6759962B2 (en) * | 2001-04-25 | 2004-07-06 | Rosemount Aerospace Inc. | Inflight ice detector to distinguish supercooled large droplet (SLD) icing |
| CA2452623A1 (en) * | 2001-06-29 | 2003-01-09 | Rosemount Aerospace Inc. | Supercooled large droplet ice detector |
| EP1396425A1 (en) | 2003-03-10 | 2004-03-10 | Auxitrol SA | Large spectrum icing conditions detector |
| US7324001B2 (en) * | 2005-08-29 | 2008-01-29 | United States Of America As Represented By The Secretary Of The Air Force | System and method for detecting and discriminating between water and ice formation on objects |
| US20070074415A1 (en) | 2005-09-30 | 2007-04-05 | Gagnon Robert E | Method and apparatus for layer thickness measurement |
| NO20062052A (no) * | 2006-05-08 | 2007-09-03 | Norsk Miljoekraft Forskning Og Utvikling As | Fremgangsmåte og anordning for styring av effekt til en utrustning for å motvirke isdannelse eller fjerning av snø/is på en konstruksjonsdel |
| US7439877B1 (en) * | 2007-05-18 | 2008-10-21 | Philip Onni Jarvinen | Total impedance and complex dielectric property ice detection system |
| US20100020170A1 (en) * | 2008-07-24 | 2010-01-28 | Higgins-Luthman Michael J | Vehicle Imaging System |
| US8144325B2 (en) | 2009-07-23 | 2012-03-27 | Rosemount Aerospace, Inc. | In-flight multiple field of view detector for supercooled airborne water droplets |
| EP2325083B1 (en) * | 2009-11-24 | 2012-02-08 | AGUSTAWESTLAND S.p.A. | Aircraft with an ice detecting device |
| US8462354B2 (en) * | 2010-10-12 | 2013-06-11 | Lumen International Inc. | Aircraft icing detector |
| US9126692B2 (en) * | 2012-07-31 | 2015-09-08 | Raytheon Company | Remote actuation system for a human/machine interface |
-
2013
- 2013-01-02 US US13/732,707 patent/US9227733B2/en active Active
- 2013-10-10 CA CA2829887A patent/CA2829887C/en active Active
- 2013-12-10 EP EP13196534.5A patent/EP2774851B1/en active Active
- 2013-12-13 RU RU2013155544/11A patent/RU2586914C2/ru active
- 2013-12-18 JP JP2013261637A patent/JP6351968B2/ja active Active
- 2013-12-27 BR BR102013033738-2A patent/BR102013033738B1/pt active IP Right Grant
-
2014
- 2014-01-02 CN CN201410001154.2A patent/CN103910062B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| BR102013033738B1 (pt) | 2021-11-03 |
| US9227733B2 (en) | 2016-01-05 |
| US20140184789A1 (en) | 2014-07-03 |
| BR102013033738A2 (pt) | 2015-10-06 |
| EP2774851A1 (en) | 2014-09-10 |
| CA2829887C (en) | 2016-06-07 |
| RU2586914C2 (ru) | 2016-06-10 |
| CA2829887A1 (en) | 2014-07-02 |
| RU2013155544A (ru) | 2015-06-20 |
| CN103910062A (zh) | 2014-07-09 |
| CN103910062B (zh) | 2017-07-28 |
| EP2774851B1 (en) | 2017-03-22 |
| JP2014131906A (ja) | 2014-07-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6351968B2 (ja) | 自動水滴測定及び氷検出システム | |
| JP6757786B2 (ja) | 航空機における氷の形成を検出するための装置 | |
| JP2014131906A5 (ja) | ||
| CN102407942B (zh) | 结冰条件探测器 | |
| EP3299294B1 (en) | System and method for anti-icing an ice prone surface of an aircraft | |
| CN105383701B (zh) | 检测飞机上的飞行中结冰情况 | |
| EP2674361B1 (en) | Icing condition detection system | |
| EP2876050B1 (en) | Ice detector | |
| EP2800690B1 (en) | Supercooled large drop icing condition detection system | |
| US8704181B2 (en) | Device and method for detecting ice deposited on an aircraft structure | |
| CA2681630C (fr) | Procede et dispositif de detection de givre et/ou conditions givrantes sur aeronef en vol | |
| CN103043216B (zh) | 结冰探测器 | |
| CN110435898A (zh) | 用于微滴大小区分的表面感测 | |
| BR102018074412B1 (pt) | Método para detectar a presença de cristais de gelo em um ambiente | |
| EP3263460B1 (en) | Automated super-cooled water-droplet size differentiation using aircraft accretion patterns | |
| CA2963908A1 (en) | Automated super-cooled water-droplet size differentiation using aircraft accretion patterns | |
| CA3018251C (en) | Apparatus and method of monitoring for in-flight aircraft engine ice crystal accretion | |
| CN110316386A (zh) | 通过分析电流消耗检测飞行器的结冰状况 | |
| BR102017011192B1 (pt) | Sistema de medição de tamanho de gotícula de água super-resfriada, e, método para gerar um alerta |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161209 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161209 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171024 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171026 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180110 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180508 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180606 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6351968 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |