JP6346850B2 - モデリング装置、モデリング方法、及びモデリングプログラム - Google Patents
モデリング装置、モデリング方法、及びモデリングプログラム Download PDFInfo
- Publication number
- JP6346850B2 JP6346850B2 JP2014233878A JP2014233878A JP6346850B2 JP 6346850 B2 JP6346850 B2 JP 6346850B2 JP 2014233878 A JP2014233878 A JP 2014233878A JP 2014233878 A JP2014233878 A JP 2014233878A JP 6346850 B2 JP6346850 B2 JP 6346850B2
- Authority
- JP
- Japan
- Prior art keywords
- point
- function
- points
- value
- generating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 61
- 238000004364 calculation method Methods 0.000 claims description 70
- 238000012545 processing Methods 0.000 claims description 62
- 230000006870 function Effects 0.000 description 202
- 238000010586 diagram Methods 0.000 description 37
- 238000013500 data storage Methods 0.000 description 29
- 230000010365 information processing Effects 0.000 description 16
- 210000000056 organ Anatomy 0.000 description 11
- 238000012217 deletion Methods 0.000 description 8
- 230000037430 deletion Effects 0.000 description 8
- 238000004891 communication Methods 0.000 description 3
- 210000004165 myocardium Anatomy 0.000 description 3
- 210000001765 aortic valve Anatomy 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 238000002591 computed tomography Methods 0.000 description 2
- 238000002595 magnetic resonance imaging Methods 0.000 description 2
- 210000004115 mitral valve Anatomy 0.000 description 2
- 210000003102 pulmonary valve Anatomy 0.000 description 2
- 210000000591 tricuspid valve Anatomy 0.000 description 2
- 238000000354 decomposition reaction Methods 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 230000008030 elimination Effects 0.000 description 1
- 238000003379 elimination reaction Methods 0.000 description 1
- 230000005305 organ development Effects 0.000 description 1
- 230000002980 postoperative effect Effects 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 238000001308 synthesis method Methods 0.000 description 1
- 230000002861 ventricular Effects 0.000 description 1
Images

























Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/60—Analysis of geometric attributes
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H50/00—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics
- G16H50/50—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics for simulation or modelling of medical disorders
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Public Health (AREA)
- Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Primary Health Care (AREA)
- Epidemiology (AREA)
- Data Mining & Analysis (AREA)
- Databases & Information Systems (AREA)
- Biomedical Technology (AREA)
- Pathology (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Geometry (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
- Image Generation (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Quality & Reliability (AREA)
Description
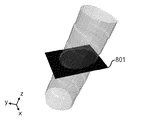
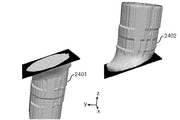
第1の実施の形態においては、環状に配置されたランドマークを通る曲面によって物体の形状を分割する例について説明する。

第2の実施の形態においては、環状に配置されたランドマークに従って物体の形状を修正する例について説明する。
第3の実施の形態においては、第1の実施の形態において説明した技術及び第2の実施の形態において説明した技術に基づき心室の形状を修正する例について説明する。
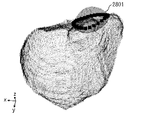
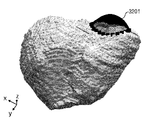
物体における環状の構造を表す複数の点の位置情報に基づき、前記複数の点を包含する閉曲面を生成するための第1の関数を算出する第1算出部と、
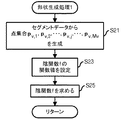
各々前記物体が占める領域が指定された複数の断層画像から、物体の境界を表す第1の点集合を生成する第1生成部と、
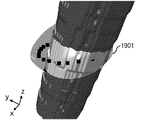
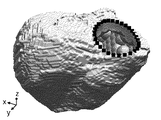
前記第1の点集合のうち前記閉曲面の内側に存在する点を前記第1の関数を用いて検出し、検出された前記点を前記第1の点集合から削除することにより第2の点集合を生成し、前記第2の点集合と前記複数の点とを用いて、前記物体の形状を生成するための第2の関数を算出する第2算出部と、
を有するモデリング装置。
前記複数の点を通る曲面を生成するための第3の関数を算出する第3算出部と、
前記第2の関数を用いて生成される前記物体の形状を、前記第3の関数を用いて生成される前記曲面で分割する分割部と、
をさらに有する付記1記載のモデリング装置。
前記第1算出部は、
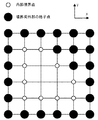
前記複数の点の各々について、当該点から当該点についての法線の正方向に第1の距離離れた点と、当該点から前記法線の正方向に第2の距離離れた点と、当該点から前記法線の負方向に前記第2の距離離れた点と、当該点から当該点についての従法線の正方向に第3の距離離れた点と、当該点から前記従法線の負方向に前記第3の距離離れた点とを含む第3の点集合を特定し、
特定された前記第3の点集合内の各点の関数値を設定し、設定された前記関数値に基づき前記第1の関数を算出する
付記1又は2記載のモデリング装置。
前記第2算出部は、
前記複数の点の各々について、当該点から当該点についての法線の正方向に第4の距離離れた点と、当該点から前記法線の負方向に前記第4の距離離れた点とを含む第4の点集合を特定し、
前記第4の点集合内の各点の関数値と、前記複数の点の各々の関数値と、前記第2の点集合内の各点の関数値とを設定し、設定された前記関数値に基づき前記第2の関数を算出する
付記1乃至3のいずれか1つ記載のモデリング装置。
前記第3算出部は、
前記複数の点の各々について、当該点から当該点についての従法線の正方向に第5の距離離れた点と、当該点から前記従法線の負方向に前記第5の距離離れた点とを含む第5の点集合を特定し、
前記第5の点集合内の各点の関数値と、前記複数の点の関数値とを設定し、設定された前記関数値に基づき前記第3の関数を算出する
付記2記載のモデリング装置。
前記第2算出部は、
前記第1の関数の値が所定の値より大きいか否かに基づき、前記第1の点集合のうち前記閉曲面の内側に存在する点を検出する
付記1乃至5のいずれか1つ記載のモデリング装置。
前記第1の点集合は、前記物体が占める領域における点のうち前記物体が占める領域以外の領域に隣接する点と、前記物体が占める領域以外の領域における点のうち前記物体が占める領域に隣接する点とを含む
付記1乃至6のいずれか1つ記載のモデリング装置。
物体における環状の構造を表す複数の点の位置情報に基づき、前記複数の点を包含する閉曲面を生成するための第1の関数を算出し、
各々前記物体が占める領域が指定された複数の断層画像から、物体の境界を表す第1の点集合を生成し、
前記第1の点集合のうち前記閉曲面の内側に存在する点を前記第1の関数を用いて検出し、検出された前記点を前記第1の点集合から削除することにより第2の点集合を生成し、
前記複数の点と前記第2の点集合とを用いて、前記物体の形状を生成するための第2の関数を算出する、
処理をコンピュータが実行するモデリング方法。
物体における環状の構造を表す複数の点の位置情報に基づき、前記複数の点を包含する閉曲面を生成するための第1の関数を算出し、
各々前記物体が占める領域が指定された複数の断層画像から、物体の境界を表す第1の点集合を生成し、
前記第1の点集合のうち前記閉曲面の内側に存在する点を前記第1の関数を用いて検出し、検出された前記点を前記第1の点集合から削除することにより第2の点集合を生成し、
前記複数の点と前記第2の点集合とを用いて、前記物体の形状を生成するための第2の関数を算出する、
処理をコンピュータに実行させるためのモデリングプログラム。
103 第1算出部 105 第1関数格納部
107 セグメントデータ格納部 109 第2算出部
111 第2関数格納部 113 分割部
115 データ格納部 117 出力部
119 第3算出部 121 第3関数格納部
123 第4算出部 125 第4関数格納部
127 削除部
Claims (8)
- 物体における環状の構造を表す複数の点の位置情報に基づき、前記複数の点を包含する閉曲面を生成するための第1の関数を算出する第1算出部と、
各々前記物体が占める領域が指定された複数の断層画像から、物体の境界を表す第1の点集合を生成する第1生成部と、
前記第1の点集合のうち前記閉曲面の内側に存在する点を前記第1の関数を用いて検出し、検出された前記点を前記第1の点集合から削除することにより第2の点集合を生成し、前記第2の点集合と前記複数の点とを用いて、前記物体の形状を生成するための第2の関数を算出する第2算出部と、
を有するモデリング装置。 - 前記複数の点を通る曲面を生成するための第3の関数を算出する第3算出部と、
前記第2の関数を用いて生成される前記物体の形状を、前記第3の関数を用いて生成される前記曲面で分割する分割部と、
をさらに有する請求項1記載のモデリング装置。 - 前記第1算出部は、
前記複数の点の各々について、当該点から当該点についての法線の正方向に第1の距離離れた点と、当該点から前記法線の正方向に第2の距離離れた点と、当該点から前記法線の負方向に前記第2の距離離れた点と、当該点から当該点についての従法線の正方向に第3の距離離れた点と、当該点から前記従法線の負方向に前記第3の距離離れた点とを含む第3の点集合を特定し、
特定された前記第3の点集合内の各点の関数値を設定し、設定された前記関数値に基づき前記第1の関数を算出する
請求項1又は2記載のモデリング装置。 - 前記第2算出部は、
前記複数の点の各々について、当該点から当該点についての法線の正方向に第4の距離離れた点と、当該点から前記法線の負方向に前記第4の距離離れた点とを含む第4の点集合を特定し、
前記第4の点集合内の各点の関数値と、前記複数の点の各々の関数値と、前記第2の点集合内の各点の関数値とを設定し、設定された前記関数値に基づき前記第2の関数を算出する
請求項1乃至3のいずれか1つ記載のモデリング装置。 - 前記第3算出部は、
前記複数の点の各々について、当該点から当該点についての従法線の正方向に第5の距離離れた点と、当該点から前記従法線の負方向に前記第5の距離離れた点とを含む第5の点集合を特定し、
前記第5の点集合内の各点の関数値と、前記複数の点の関数値とを設定し、設定された前記関数値に基づき前記第3の関数を算出する
請求項2記載のモデリング装置。 - 前記第2算出部は、
前記第1の関数の値が所定の値より大きいか否かに基づき、前記第1の点集合のうち前記閉曲面の内側に存在する点を検出する
請求項1乃至5のいずれか1つ記載のモデリング装置。 - 物体における環状の構造を表す複数の点の位置情報に基づき、前記複数の点を包含する閉曲面を生成するための第1の関数を算出し、
各々前記物体が占める領域が指定された複数の断層画像から、物体の境界を表す第1の点集合を生成し、
前記第1の点集合のうち前記閉曲面の内側に存在する点を前記第1の関数を用いて検出し、検出された前記点を前記第1の点集合から削除することにより第2の点集合を生成し、
前記複数の点と前記第2の点集合とを用いて、前記物体の形状を生成するための第2の関数を算出する、
処理をコンピュータが実行するモデリング方法。 - 物体における環状の構造を表す複数の点の位置情報に基づき、前記複数の点を包含する閉曲面を生成するための第1の関数を算出し、
各々前記物体が占める領域が指定された複数の断層画像から、物体の境界を表す第1の点集合を生成し、
前記第1の点集合のうち前記閉曲面の内側に存在する点を前記第1の関数を用いて検出し、検出された前記点を前記第1の点集合から削除することにより第2の点集合を生成し、
前記複数の点と前記第2の点集合とを用いて、前記物体の形状を生成するための第2の関数を算出する、
処理をコンピュータに実行させるためのモデリングプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014233878A JP6346850B2 (ja) | 2014-11-18 | 2014-11-18 | モデリング装置、モデリング方法、及びモデリングプログラム |
| US14/918,824 US10453209B2 (en) | 2014-11-18 | 2015-10-21 | Modeling method and apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014233878A JP6346850B2 (ja) | 2014-11-18 | 2014-11-18 | モデリング装置、モデリング方法、及びモデリングプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016096854A JP2016096854A (ja) | 2016-05-30 |
| JP6346850B2 true JP6346850B2 (ja) | 2018-06-20 |
Family
ID=55961995
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014233878A Active JP6346850B2 (ja) | 2014-11-18 | 2014-11-18 | モデリング装置、モデリング方法、及びモデリングプログラム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10453209B2 (ja) |
| JP (1) | JP6346850B2 (ja) |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5343391A (en) * | 1990-04-10 | 1994-08-30 | Mushabac David R | Device for obtaining three dimensional contour data and for operating on a patient and related method |
| JPH08206117A (ja) * | 1994-05-27 | 1996-08-13 | Fujitsu Ltd | 超音波診断装置 |
| US6587711B1 (en) * | 1999-07-22 | 2003-07-01 | The Research Foundation Of Cuny | Spectral polarizing tomographic dermatoscope |
| EP1687777A2 (en) * | 2003-11-28 | 2006-08-09 | BRACCO IMAGING S.p.A. | Method and system for distinguishing surfaces in 3d data sets ("dividing voxels") |
| US7339585B2 (en) * | 2004-07-19 | 2008-03-04 | Pie Medical Imaging B.V. | Method and apparatus for visualization of biological structures with use of 3D position information from segmentation results |
| WO2006023530A2 (en) * | 2004-08-16 | 2006-03-02 | Massachusetts Institute Of Technology | Compositions and methods for enhancing structural and functional nervous system reorganization and recovery |
| WO2007058997A2 (en) * | 2005-11-11 | 2007-05-24 | The University Of Houston System | Scoring method for imaging-based detection of vulnerable patients |
| US9275190B2 (en) * | 2007-04-23 | 2016-03-01 | Siemens Aktiengesellschaft | Method and system for generating a four-chamber heart model |
| US8538103B2 (en) * | 2009-02-10 | 2013-09-17 | Hitachi Medical Corporation | Medical image processing device, medical image processing method, medical image diagnostic apparatus, operation method of medical image diagnostic apparatus, and medical image display method |
| JP5731882B2 (ja) * | 2011-04-13 | 2015-06-10 | トムテック イマジング システムズ ゲゼルシャフト ミットべシュレンクテル ハフツンク | 医用画像データをセグメント化するための方法及び装置 |
| JP2012245106A (ja) * | 2011-05-26 | 2012-12-13 | Aze Ltd | 心臓存在領域抽出装置およびプログラム |
| JP5721225B2 (ja) | 2011-07-01 | 2015-05-20 | 富士通株式会社 | 形状データ生成方法、プログラム及び装置 |
| JP6253992B2 (ja) | 2014-01-09 | 2017-12-27 | 富士通株式会社 | 臓器位置推定装置、臓器位置推定装置の制御方法および臓器位置推定装置の制御プログラム |
-
2014
- 2014-11-18 JP JP2014233878A patent/JP6346850B2/ja active Active
-
2015
- 2015-10-21 US US14/918,824 patent/US10453209B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US10453209B2 (en) | 2019-10-22 |
| US20160140418A1 (en) | 2016-05-19 |
| JP2016096854A (ja) | 2016-05-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108601552B (zh) | 医学成像和医学成像信息的有效共享 | |
| JP5610129B2 (ja) | 3次元テンプレート変形方法、装置及びプログラム | |
| Zhu et al. | An image morphing technique based on optimal mass preserving mapping | |
| JP7467348B2 (ja) | 医用画像データの表示 | |
| US10891787B2 (en) | Apparatus and method for creating biological model | |
| JP6824845B2 (ja) | 画像処理システム、装置、方法およびプログラム | |
| US20180144516A1 (en) | Systems and methods for an integrated system for visualizing, simulating, modifying and 3d printing 3d objects | |
| US20210256703A1 (en) | Machine learning device, estimation device, non-transitory computer readable medium, and learned model | |
| JP5850381B2 (ja) | 形状データ生成プログラム、形状データ生成方法及び形状データ生成装置 | |
| JP5721225B2 (ja) | 形状データ生成方法、プログラム及び装置 | |
| US20220108540A1 (en) | Devices, systems and methods for generating and providing image information | |
| US10679350B2 (en) | Method and apparatus for adjusting a model of an anatomical structure | |
| CN108805876B (zh) | 使用生物力学模型的磁共振和超声图像的可形变配准的方法和系统 | |
| US11676361B2 (en) | Computer-readable recording medium having stored therein training program, training method, and information processing apparatus | |
| Suwelack et al. | The medical simulation markup language-simplifying the biomechanical modeling workflow. | |
| WO2022163513A1 (ja) | 学習済みモデルの生成方法、機械学習システム、プログラムおよび医療画像処理装置 | |
| WO2020175445A1 (ja) | 学習方法、学習装置、生成モデル及びプログラム | |
| JP6346850B2 (ja) | モデリング装置、モデリング方法、及びモデリングプログラム | |
| JP2009541777A (ja) | 関心のある心筋部位の自動定義 | |
| JP6571784B2 (ja) | 構造推定装置、構造推定方法、および、プログラム | |
| US20190251692A1 (en) | Method and apparatus for segmenting a two-dimensional image of an anatomical structure | |
| Dłotko et al. | Topology preserving thinning of cell complexes | |
| JP6253962B2 (ja) | 情報処理装置及び方法 | |
| JP2013013744A (ja) | 画像処理装置及び画像処理方法 | |
| JP5954846B2 (ja) | 形状データ生成プログラム、形状データ生成方法及び形状データ生成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170801 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180424 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180515 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180528 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6346850 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |