JP6336952B2 - 群衆解析装置 - Google Patents
群衆解析装置 Download PDFInfo
- Publication number
- JP6336952B2 JP6336952B2 JP2015193437A JP2015193437A JP6336952B2 JP 6336952 B2 JP6336952 B2 JP 6336952B2 JP 2015193437 A JP2015193437 A JP 2015193437A JP 2015193437 A JP2015193437 A JP 2015193437A JP 6336952 B2 JP6336952 B2 JP 6336952B2
- Authority
- JP
- Japan
- Prior art keywords
- segment
- crowd
- normal
- spatiotemporal
- movement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004458 analytical method Methods 0.000 title claims description 69
- 230000005856 abnormality Effects 0.000 claims description 73
- 230000002159 abnormal effect Effects 0.000 claims description 69
- 238000011156 evaluation Methods 0.000 claims description 37
- 238000003860 storage Methods 0.000 claims description 31
- 208000012661 Dyskinesia Diseases 0.000 claims description 18
- 230000008859 change Effects 0.000 claims description 6
- 230000002123 temporal effect Effects 0.000 claims description 5
- 238000012545 processing Methods 0.000 description 44
- 238000001514 detection method Methods 0.000 description 43
- 238000000034 method Methods 0.000 description 27
- 230000008569 process Effects 0.000 description 17
- 230000006870 function Effects 0.000 description 11
- 238000010586 diagram Methods 0.000 description 9
- 238000003384 imaging method Methods 0.000 description 9
- 238000009826 distribution Methods 0.000 description 8
- 230000003287 optical effect Effects 0.000 description 8
- 230000011218 segmentation Effects 0.000 description 7
- 238000012544 monitoring process Methods 0.000 description 6
- 230000005484 gravity Effects 0.000 description 5
- 238000009825 accumulation Methods 0.000 description 3
- 230000007423 decrease Effects 0.000 description 3
- 238000012935 Averaging Methods 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 238000005520 cutting process Methods 0.000 description 2
- 238000012804 iterative process Methods 0.000 description 2
- 238000010606 normalization Methods 0.000 description 2
- 230000001174 ascending effect Effects 0.000 description 1
- 230000006399 behavior Effects 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
Images








Landscapes
- Closed-Circuit Television Systems (AREA)
- Burglar Alarm Systems (AREA)
- Image Analysis (AREA)
Description
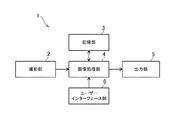
図1は異常検知装置1の概略の構成を示すブロック図である。異常検知装置1は撮影部2、記憶部3、画像処理部4、出力部5及びユーザーインターフェース部6から構成される。
SC <min(CINT+α/N) ………(1)
また、現時刻で得られた時空間セグメントの動き特徴量から動きの解析を行っても良いし、複数時刻の時空間セグメントの動き特徴量を利用して統計的に動きの解析を行っても良い。現時刻で得られた時空間セグメントの動き特徴量のみを利用して動きの解析を行えば、瞬間的な動きの変化を検出することが可能である。一方で、各時刻の時空間セグメントの動き特徴量を統計して解析を行えば、より安定した動きの解析が可能である。統計的に動きの解析を行う場合、異なる時刻から得られた時空間セグメント間では時空間セグメント同士の位置及び形状が一致しないため、上述したように画素単位の解析を行って画素位置ごとに動き特徴量の統計量を算出するとよい。統計量は、例えば複数時刻の動き特徴量の平均値とすることができ、また例えば複数時刻の動き特徴量の混合正規分布などとすることができる。

・時空間セグメント間の重心距離
・時空間セグメント間の面積比
図7は異常検知装置1が正常モデルを生成する学習動作時の概略のフロー図である。
図8は異常検知装置1の異常検知動作時の概略のフロー図である。異常検知動作におけるステップS50〜S52の処理内容は学習動作時のステップS10〜S11と同様である。撮影部2から画像処理部4が取得した画像は記憶部3に格納される。群衆検出手段40が群衆を検出した場合(S52にてYESの場合)、画像処理部4は群衆の動き解析処理を行う(ステップS53)。なお、分析区間長の画像が蓄積されるまでの間、当該動き解析処理S53は省略される。
(1)上記実施形態においてエネルギー算出手段431Bは、正常特徴量に基づくエネルギーと周囲セグメントに基づくエネルギーを加算したが、エネルギー算出手段431Bはいずれか一方に基づくエネルギーを算出してもよい。すなわち正常モデルに基づくエネルギーのみでも異常検知を行うことができる。
Claims (5)
- 所定空間を移動する群衆を撮影した複数時刻の空間画像から前記群衆の動きを解析する群衆解析装置であって、
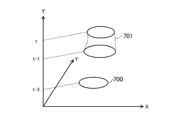
前記空間画像を時間軸に沿って並べた時空間画像における近傍画素間での画素値の相違度を算出し、当該相違度に基づき前記時空間画像を分割し、分割境界にて内部よりも高い前記相違度を有する複数の時空間セグメントを生成する時空間分割手段と、
前記複数の時空間セグメントのそれぞれにおいて、撮影時刻が同一である画素の代表位置を算出し、前記代表位置の時間変化を表す動き特徴量を算出する動き特徴量算出手段と、
前記複数の時空間セグメントから算出された前記動き特徴量を用いて前記空間画像に撮影された前記群衆の動きを解析する動き解析手段と、
を備えたことを特徴とする群衆解析装置。 - 前記動き特徴量算出手段は、前記複数の時空間セグメントのうちその時間長が予め定めた値以上であるものから前記動き特徴量を算出することを特徴とする請求項1に記載の群衆解析装置。
- 前記動き解析手段は、
予め求めた前記群衆の正常な動きを表す正常特徴量を前記空間画像における画素位置ごとに記憶している正常モデル記憶手段と、
前記複数の時空間セグメントそれぞれについて、その前記動き特徴量と当該時空間セグメントに対応する画素位置の前記正常特徴量とを比較して、前記空間画像に撮影された前記群衆の動きの前記正常な動きに対する乖離の大きさを評価し、その評価値が基準値以上である場合に前記群衆に異常な動きが発生したと判定する異常判定手段と、
を備えたことを特徴とする請求項1又は請求項2に記載の群衆解析装置。 - 前記異常判定手段は、
前記複数の時空間セグメントのうち任意の時空間セグメントを異常セグメントに仮設定すると共に残りを正常セグメントに仮設定することにより、前記空間画像における前記群衆の動き状態を複数通りに仮設定する状態仮設定手段と、
前記群衆の正常な動きに対する前記動き状態の前記乖離を評価するためのエネルギー値を、前記異常セグメントの前記動き特徴量と当該異常セグメントに対応する画素位置の前記正常特徴量との類似度、前記正常セグメントの前記動き特徴量と当該正常セグメントに対応する画素位置の前記正常特徴量との相違度、及び前記時空間画像において前記異常セグメントに隣接する前記正常セグメントと当該異常セグメントとの前記動き特徴量の類似度を総和して算出するエネルギー算出手段と、
複数の前記動き状態のうち前記エネルギー値が最小となる動き状態における前記異常セグメントの大きさを前記評価値として算出する乖離評価値算出手段と、
を備えたことを特徴とする請求項3に記載の群衆解析装置。 - 前記動き解析手段は、
前記複数の時空間セグメントのうち任意の時空間セグメントを異常セグメントに仮設定すると共に残りを正常セグメントに仮設定することにより、前記空間画像における前記群衆の動き状態を複数通りに仮設定する状態仮設定手段と、
前記動き状態ごとに、前記時空間画像において前記異常セグメントに隣接する前記正常セグメントと当該異常セグメントとの前記動き特徴量の類似度を総和してエネルギー値を算出するエネルギー算出手段と、
複数の前記動き状態のうち前記エネルギー値が最小となる動き状態における前記異常セグメントの大きさを評価値として算出する評価値算出手段と、
前記評価値が基準値以上である場合に前記群衆に異常な動きが発生したと判定する異常判定手段と、
を備えたことを特徴とする請求項1又は請求項2に記載の群衆解析装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015193437A JP6336952B2 (ja) | 2015-09-30 | 2015-09-30 | 群衆解析装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015193437A JP6336952B2 (ja) | 2015-09-30 | 2015-09-30 | 群衆解析装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017068598A JP2017068598A (ja) | 2017-04-06 |
| JP2017068598A5 JP2017068598A5 (ja) | 2017-06-15 |
| JP6336952B2 true JP6336952B2 (ja) | 2018-06-06 |
Family
ID=58494837
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015193437A Active JP6336952B2 (ja) | 2015-09-30 | 2015-09-30 | 群衆解析装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6336952B2 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9600896B1 (en) * | 2015-11-04 | 2017-03-21 | Mitsubishi Electric Research Laboratories, Inc. | Method and system for segmenting pedestrian flows in videos |
| JP6824844B2 (ja) * | 2017-07-28 | 2021-02-03 | セコム株式会社 | 画像解析装置 |
| JP7005213B2 (ja) * | 2017-08-04 | 2022-01-21 | セコム株式会社 | 画像解析装置 |
| JP6968645B2 (ja) * | 2017-10-02 | 2021-11-17 | キヤノン株式会社 | 画像処理装置、画像処理方法及びプログラム |
| US10824935B2 (en) * | 2018-10-17 | 2020-11-03 | Mitsubishi Electric Research Laboratories, Inc. | System and method for detecting anomalies in video using a similarity function trained by machine learning |
| US12014563B2 (en) * | 2018-11-21 | 2024-06-18 | Nec Corporation | Information processing apparatus, control method, and non-transitory storage medium |
| JP7115277B2 (ja) * | 2018-12-10 | 2022-08-09 | トヨタ自動車株式会社 | 行動監視装置、行動監視システム、及び行動監視プログラム |
| JP2020170252A (ja) | 2019-04-01 | 2020-10-15 | キヤノン株式会社 | 画像処理装置、情報処理方法及びプログラム |
| US11106904B2 (en) * | 2019-11-20 | 2021-08-31 | Omron Corporation | Methods and systems for forecasting crowd dynamics |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4235854B2 (ja) * | 1998-11-02 | 2009-03-11 | 独立行政法人情報通信研究機構 | 画像処理方法及び装置 |
| JP4368767B2 (ja) * | 2004-09-08 | 2009-11-18 | 独立行政法人産業技術総合研究所 | 異常動作検出装置および異常動作検出方法 |
| JP4663756B2 (ja) * | 2008-04-28 | 2011-04-06 | 株式会社日立製作所 | 異常行動検知装置 |
| JP4966946B2 (ja) * | 2008-10-08 | 2012-07-04 | 日本電信電話株式会社 | 時空間画像分離装置、時空間画像分離方法および時空間画像分離プログラム |
| JP5986689B2 (ja) * | 2012-11-06 | 2016-09-06 | アルカテル−ルーセント | イベント検出のために視覚情報を処理するためのシステムおよび方法 |
| JP6448109B2 (ja) * | 2013-12-20 | 2019-01-09 | 日本放送協会 | 映像領域分割装置および映像領域分割プログラム |
| JP6272071B2 (ja) * | 2014-02-18 | 2018-01-31 | 日本放送協会 | 画像処理装置、画像処理方法及びプログラム |
-
2015
- 2015-09-30 JP JP2015193437A patent/JP6336952B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017068598A (ja) | 2017-04-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6336952B2 (ja) | 群衆解析装置 | |
| JP7428213B2 (ja) | 情報処理システム、情報処理方法及びプログラム | |
| CN109076198B (zh) | 基于视频的对象跟踪遮挡检测系统、方法和设备 | |
| Gabriel et al. | The state of the art in multiple object tracking under occlusion in video sequences | |
| JP4741650B2 (ja) | ビデオシーケンスにおけるオブジェクト追跡の方法 | |
| JP2016099941A (ja) | オブジェクト位置推定システム、及びそのプログラム | |
| US20090041297A1 (en) | Human detection and tracking for security applications | |
| US8908915B2 (en) | Devices and methods for tracking moving objects | |
| Liem et al. | Joint multi-person detection and tracking from overlapping cameras | |
| JP7272024B2 (ja) | 物体追跡装置、監視システムおよび物体追跡方法 | |
| Srivastava et al. | Crowd flow estimation using multiple visual features for scenes with changing crowd densities | |
| CN106603968B (zh) | 信息处理装置及信息处理方法 | |
| JP4644022B2 (ja) | 映像解析装置および映像解析プログラム | |
| Liem et al. | A comparative study on multi-person tracking using overlapping cameras | |
| JP6607630B2 (ja) | 移動物体抽出装置、方法およびプログラム | |
| KR101137110B1 (ko) | 영상 내 물체 감시 방법 및 장치 | |
| WO2016019973A1 (en) | Method for determining stationary crowds | |
| Sajid et al. | Crowd counting using adaptive segmentation in a congregation | |
| Almomani et al. | Segtrack: A novel tracking system with improved object segmentation | |
| Li et al. | Evaluating the performance of systems for tracking football players and ball | |
| EP1683108A2 (en) | Object tracking within video images | |
| JP2020086879A (ja) | 座標変換行列推定方法及びコンピュータプログラム | |
| Deepak et al. | Design and utilization of bounding box in human detection and activity identification | |
| JP2018185623A (ja) | 物体検出装置 | |
| Ganapathyraja et al. | Suspicious Loitering detection using a contour-based Object Tracking and Image Moment for Intelligent Video Surveillance System |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170424 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170424 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180411 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180424 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180507 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6336952 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |