JP6323064B2 - Traveling lane identification device, lane change support device, traveling lane identification method - Google Patents
Traveling lane identification device, lane change support device, traveling lane identification method Download PDFInfo
- Publication number
- JP6323064B2 JP6323064B2 JP2014035006A JP2014035006A JP6323064B2 JP 6323064 B2 JP6323064 B2 JP 6323064B2 JP 2014035006 A JP2014035006 A JP 2014035006A JP 2014035006 A JP2014035006 A JP 2014035006A JP 6323064 B2 JP6323064 B2 JP 6323064B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- lane
- traveling
- unit
- host
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Landscapes
- Traffic Control Systems (AREA)
Description
本発明は、走行車線識別装置、車線変更支援装置、及び走行車線識別方法に関するものである。 The present invention relates to a travel lane identification device, a lane change support device, and a travel lane identification method.
特許文献1に記載の従来技術では、運転者が車線変更を意図して方向指示器を操作したときに、自車両周囲を撮像しているカメラ画像により、隣接車線を走行する他車両を検出する。そして、自車両が割り込めるスペースがあるときには、割り込みを開始するタイミングを運転者に報知し、割り込めるスペースがないときには、その旨を運転者に報知している。 In the prior art described in Patent Document 1, when a driver operates a direction indicator with the intention of changing lanes, other vehicles traveling in adjacent lanes are detected from a camera image capturing the surroundings of the host vehicle. . When there is a space that can be interrupted by the host vehicle, the driver is notified of the timing for starting the interruption, and when there is no space that can be interrupted, the driver is notified of that.
しかしながら、カメラ画像から他車両を検出する構成では、例えば夜間や悪天候時のように白線の視認性が低下した状況では、自車両よりも後方で、且つ遠方の他車両が隣接車線を走行しているのか、それとも自車両と同じ車線を走行しているのか識別しにくい。
本発明の課題は、周囲の視認性が低下しているような状況においても、他車両の走行車線を識別することである。
However, in the configuration in which the other vehicle is detected from the camera image, for example, in a situation where the visibility of the white line is reduced such as at night or in bad weather, another vehicle that is behind and far from the own vehicle travels in the adjacent lane. It is difficult to identify whether the vehicle is in the same lane as the vehicle.
An object of the present invention is to identify the travel lane of another vehicle even in a situation where the visibility of the surroundings is lowered.
本発明の一態様に係る走行車線識別装置は、自車両の現在位置の道路地図を取得し、レーダ部による照射波の出力及び反射波の入力によって、自車両の周囲を走行している他車両の相対位置を検出する。そして、予め定めた平面座標で、自車両の現在位置を基準に、道路地図取得部で取得した道路地図、及びレーダ部で検出した他車両の相対位置を重畳することにより、他車両の走行車線を識別する。 A traveling lane identification device according to an aspect of the present invention acquires a road map of the current position of the host vehicle, and another vehicle traveling around the host vehicle by outputting an irradiation wave and a reflected wave by a radar unit. The relative position of is detected. Then, the road lane of the other vehicle is superimposed by superimposing the road map acquired by the road map acquisition unit and the relative position of the other vehicle detected by the radar unit with a predetermined plane coordinate based on the current position of the host vehicle. Identify
本発明によれば、レーダ部で他車両を検出し、予め定めた平面座標で、自車両を基準に道路地図及び他車両の相対位置を重畳したものを、他車両の走行車線を識別するための指標とする。したがって、周囲の視認性が低下しているような状況においても、他車両の走行車線を識別することができる。 According to the present invention, the other vehicle is detected by the radar unit, and the road lane of the other vehicle is identified by superimposing the road map and the relative position of the other vehicle on the basis of the own vehicle with predetermined plane coordinates. As an indicator of Therefore, it is possible to identify the traveling lane of another vehicle even in a situation where the visibility of the surroundings is lowered.
以下、本発明の実施形態を図面に基づいて説明する。
《第1実施形態》
《構成》
本実施形態は、運転者が車線変更を意図して方向指示器を操作したときに、自車両が指示方向へと車線変更できるか否かを判定し、その判定結果を運転者に報知することで、車線変更を支援するものである。また、自車両が指示方向へと車線変更できるか否かを判定するために、自車両周囲の他車両が、どの走行車線を走行しているかを識別するものである。なお、運転者が運転している場合に限らず、人為的な運転操作がなくとも、車両に搭載されたレーダやカメラ等で周囲の環境を認識し、車両の走行システムが主体となって自律的に走行(自動走行)できるものにも適応できる。
車線変更支援装置11の構成を、図1に基づいて説明する。
本実施形態の車線変更支援装置11は、地図情報取得部12と、レーダ部13と、操作検出部14と、車輪速センサ31と、コントローラ15と、報知部16と、を備える。
地図情報取得部12は、自車両の現在位置の道路地図を取得する。ここでは、例えばナビゲーションシステムとする。
Hereinafter, embodiments of the present invention will be described with reference to the drawings.
<< First Embodiment >>
"Constitution"
In this embodiment, when the driver operates the direction indicator with the intention of changing the lane, it is determined whether or not the own vehicle can change the lane in the indicated direction, and the determination result is notified to the driver. This is to support lane change. In addition, in order to determine whether or not the own vehicle can change the lane in the indicated direction, it identifies which traveling lane the other vehicle around the own vehicle is traveling. In addition, not only when the driver is driving, but even if there is no human driving operation, the surrounding environment is recognized by the radar and camera mounted on the vehicle, and the vehicle traveling system is the main autonomous It can also be applied to those that can travel automatically (automatic traveling).
The configuration of the lane
The lane
The map
ナビゲーションシステムは、自車両の現在位置と、その現在位置における道路地図情報を認識する。ナビゲーションシステムは、GPS受信機を有し、四つ以上のGPS衛星から到着する電波の時間差に基づいて自車両の位置(緯度、経度、高度)と進行方向とを認識する。そして、DVD‐ROMドライブやハードディスクドライブに記憶された道路種別、道路線形、車線幅、車両の通行方向等を含めた道路地図情報を参照し、自車両の現在位置における道路地図情報を認識しコントローラ15に出力する。なお、安全運転支援システム(DSSS:Driving Safety Support Systems)として、双方向無線通信(DSRC:Dedicated Short Range Communication)を利用し、各種データをインフラストラクチャから受信してもよい。 The navigation system recognizes the current position of the host vehicle and road map information at the current position. The navigation system has a GPS receiver and recognizes the position (latitude, longitude, altitude) of the host vehicle and the traveling direction based on the time difference between radio waves arriving from four or more GPS satellites. The controller refers to the road map information including the road type, road alignment, lane width, vehicle traffic direction, etc. stored in the DVD-ROM drive or hard disk drive, and recognizes the road map information at the current position of the host vehicle. 15 is output. In addition, as a safe driving support system (DSSS: Driving Safety Support Systems), various data may be received from an infrastructure using two-way radio communication (DSRC: Dedicated Short Range Communication).
レーダ部13は、車体におけるフロント、リア、左サイド、及び右サイドの計4箇所に設けられている。レーダ部13は、例えばミリ波レーダやLRF(Laser Range Finder)からなり、照射波を出力し、その反射波を入力することにより、自車両周囲に存在する前方物体までの距離、相対速度、及び方位を検出し、検出した各データをコントローラ15に出力する。
ミリ波レーダは、電磁波のうち、波長1〜10mm、周波数30〜300GHzのミリ波を用いるレーダである。距離及び相対速度については、例えばFM‐CW(Frequency Modulation-Continuous Wave)方式を利用し、ドップラ効果による周波数差に応じて距離及び相対速度を検出する。方位については、例えばDBF(Digital Beam Forming)方式を利用し、複数のチャンネルで受信した反射波の位相差に応じて方位を検出する。
The
The millimeter wave radar is a radar that uses millimeter waves having a wavelength of 1 to 10 mm and a frequency of 30 to 300 GHz among electromagnetic waves. As for the distance and the relative speed, for example, an FM-CW (Frequency Modulation-Continuous Wave) method is used, and the distance and the relative speed are detected according to the frequency difference due to the Doppler effect. As for the azimuth, for example, a DBF (Digital Beam Forming) method is used, and the azimuth is detected according to the phase difference of reflected waves received by a plurality of channels.
LRFは、電磁波のうち、可視光領域のレーザ光を用いるレーダである。二次元スキャンは、偏向器となるポリゴンミラーの回転によって行う。距離及び相対速度については、レーザ光を照射してから、その反射光を受光するまでの時間に応じて距離及び相対速度を検出する。方位については、ポリゴンミラーの回転角に応じて方位を検出する。
なお、4つのレーダ部13を区別する際には、車体のフロントに設けたレーダ部をフロントレーダ部13Fとし、車体のリアに設けたレーダ部をリアレーダ部13Rとし、車体の左サイドに設けたレーダ部を左サイドレーダ部13SLとし、車体の右サイドに設けたレーダ部を右サイドレーダ部13SRとする。
LRF is a radar that uses laser light in the visible light region of electromagnetic waves. Two-dimensional scanning is performed by rotation of a polygon mirror serving as a deflector. As for the distance and the relative speed, the distance and the relative speed are detected according to the time from when the laser beam is irradiated until the reflected light is received. As for the azimuth, the azimuth is detected according to the rotation angle of the polygon mirror.
When distinguishing the four
レーダ部13の配置例を、図2に基づいて説明する。
フロントレーダ部13Fは、例えばフロントグリルに設けられ、主に車体前方に存在する前方物体までの距離、相対速度、及び方位を検出する。リアレーダ部13Rは、例えばリアバンパに設けられ、主に車体後方に存在する後方物体までの距離、相対速度、及び方位を検出する。左サイドレーダ部13SLは、左側の例えばリアフェンダに設けられ、主に車体左方に存在する側方物体までの距離、相対速度、及び方位を検出する。右サイドレーダ部13SRは、右側の例えばリアフェンダに設けられ、主に車体右方に存在する側方物体までの距離、相対速度、及び方位を検出する。検出角度は、水平方向に例えば150度程度であり、検出距離は例えば100m程度である。
An example of the arrangement of the
The
操作検出部14は、ウィンカスイッチからなり、方向指示器(ウィンカ)の作動状態を検出する。このウィンカスイッチは、例えば常開接点の検出回路を介して左方向スイッチのON/OFF、及び右方向スイッチのON/OFFに応じた電圧信号をコントローラ15に出力する。コントローラ15は、入力された電圧信号からウィンカスイッチの作動状態、つまり左方向スイッチのON/OFF、及び右方向スイッチのON/OFFを判断する。
The
車輪速センサ31は、各車輪の車輪速度VwFL〜VwRRを検出する。車輪速センサ31は、例えば車輪と共に回転し円周に突起部(ギヤパルサ)が形成されたセンサロータと、このセンサロータの突起部に対向して設けられたピックアップコイルを有する検出回路と、を備える。そして、センサロータの回転に伴う磁束密度の変化を、ピックアップコイルによって電圧信号に変換してコントローラ15に出力する。コントローラ15は、入力された電圧信号から車輪速度VwFL〜VwRRを判断し、例えば非駆動輪(従動輪)の車輪速平均値や全輪の車輪速平均値を車速Vとして演算する。単位は[m/s]である。
The
コントローラ15は、例えばマイクロコンピュータからなり、走行車線識別部22と、車線変更可否判定部23と、を備える。
走行車線識別部22は、予め定めた平面座標で、自車両の現在位置を基準に、道路地図取得部12で取得した道路地図、及びレーダ部13で検出した他車両の相対位置を重畳することにより、他車両の走行車線を識別する。
車線変更可否判定部23は、操作検出部14により運転者の方向指示操作を検出したときに、走行車線識別部22の識別結果に応じて、自車両が運転者の指示方向へと車線変更できるか否かを判定する。
The
The traveling
When the
報知部16は、車線変更可否判定部23の判定結果を自車両の運転者に報知する。例えば、表示、音声、振動、制御介入等によって報知する。すなわち、後方から他車両が接近しており、車線変更をすべきでないときに、ディスプレイに警告を表示したり、警告灯を点灯させたり、警報音を発生させたり、ステアリングホイールを振動させたり、操舵反力を増加させたりする。
なお、地図情報取得部12、レーダ部13、及び走行車線識別部22が、走行車線識別装置17に対応する。
The alerting | reporting
The map
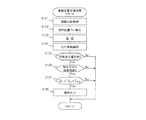
次に、コントローラ15で所定時間Δt(例えばΔt=10msec)毎に実行する車線変更支援処理を、図3に基づいて説明する。
先ずステップS101では、地図情報取得部12により、自車両Voの現在位置{xo,yo}の道路地図を取得する。
自車両Voの現在位置{xo,yo}の道路地図を、図4に基づいて説明する。
先ず、予め定めたXY座標における自車両Voの現在位置Po{xo,yo}を検出すると共に、自車両Voの進行方向φoを検出する。進行方向φoは、例えば自車両Voの1周期前の位置Po(n−1){xo(n−1),yo(n−1)}と比較した現在位置Po(n){xo(n),yo(n)}から演算される。そして、記憶された道路地図情報を参照し、自車両Voの現在位置Po{xo,yo}の道路地図を取得する。このとき、車線数、車線幅、道路線形(曲率)等に応じて、各走行車線の車線中心線LAを検出する。ここでは、片側二車線となる道路とし、左の走行車線をLA1、右の走行車線をLA2とし、走行車線LA1の車線中心線をLN1、走行車線LA2の車線中心線をLN2としている。
Next, a lane change support process executed by the
First, in step S101, the map
A road map of the current position {xo, yo} of the host vehicle Vo will be described with reference to FIG.
First, the current position Po {xo, yo} of the host vehicle Vo in the predetermined XY coordinates is detected, and the traveling direction φo of the host vehicle Vo is detected. The traveling direction φo is, for example, the current position Po (n) {xo (n) compared with the position Po (n-1) {xo (n-1) , yo (n-1) } one cycle before the host vehicle Vo. , Yo (n) }. Then, referring to the stored road map information, a road map of the current position Po {xo, yo} of the host vehicle Vo is acquired. At this time, the lane center line LA of each traveling lane is detected according to the number of lanes, the lane width, the road alignment (curvature), and the like. Here, the road is a two-lane road, the left lane is LA1, the right lane is LA2, the lane center line of the lane LA1 is LN1, and the lane center line of the lane LA2 is LN2.
続くステップS102では、レーダ部13により、自車両Voの周囲を走行している他車両Vaの相対位置Paを検出する。
他車両Vaの相対位置Paを、図5に基づいて説明する。
自車両Voを基準とする相対位置Paは、他車両Vaにおける正面(前端)の車幅方向中心点を{xa,ya}として検出される。ここでは、自車両Voよりも後方に、三台の他車両Vaを検出しており、自車両Voに近い他車両から順に、Va1、Va2、Va3としている。他車両Va1の相対位置Pa1は{xa1、ya1}で表され、他車両Va2の相対位置Pa2は{xa2、ya2}で表され、他車両Va3の相対位置Pa3は{xa3、ya3}で表される。
In subsequent step S102, the
The relative position Pa of the other vehicle Va will be described with reference to FIG.
The relative position Pa with respect to the host vehicle Vo is detected with {xa, ya} as the center point in the vehicle width direction of the front (front end) of the other vehicle Va. Here, three other vehicles Va are detected behind the own vehicle Vo, and are set as Va1, Va2, and Va3 in order from the other vehicles close to the own vehicle Vo. The relative position Pa1 of the other vehicle Va1 is represented by {xa1, ya1}, the relative position Pa2 of the other vehicle Va2 is represented by {xa2, ya2}, and the relative position Pa3 of the other vehicle Va3 is represented by {xa3, ya3}. The
続くステップS103では、予め定めたXY座標で、自車両の現在位置Po{xo,yo}を基準に、車線中心線を含む道路地図、及びレーダ部13で検出した他車両の相対位置を重畳する。
道路地図と他車両の相対位置との重畳を、図6に基づいて説明する。
ここでは、自車両Voの現在位置{xo,yo}を基準に、各走行車線LAの車線中心線LN、及び他車両Vaの相対位置Paを重畳させる。
続くステップS104では、各走行車線LAの車線中心線LNに対する他車両Vaの横位置が最小となる走行車線を、他車両Vaの走行車線LAとして識別する。
In the subsequent step S103, the road map including the lane center line and the relative position of the other vehicle detected by the
The superimposition of the road map and the relative position of the other vehicle will be described with reference to FIG.
Here, the lane center line LN of each traveling lane LA and the relative position Pa of the other vehicle Va are superimposed on the basis of the current position {xo, yo} of the host vehicle Vo.
In subsequent step S104, the travel lane in which the lateral position of the other vehicle Va with respect to the lane center line LN of each travel lane LA is minimized is identified as the travel lane LA of the other vehicle Va.
他車両Vaの車線中心線LNに対する横位置を、図7に基づいて説明する。
車線中心線LNに対する横位置とは、他車両Vaの車幅方向中心点から、他車両Vaに最も近い車線中心線LNまでの車幅方向の距離Dyである。そして、車線中心線LNに対する他車両Vaの横位置(距離Dy)が最小となる車線中心線LNを選び、その車線中心線LNに対応する走行車線LAを選ぶ。
これにより、図6では、他車両Va1の横位置(距離Dy)は、車線中心線LN2に対して最小となるので、この車線中心線LN2に対応した走行車線LA2を走行していると識別できる。また、他車両Va2の横位置(距離Dy)は、車線中心線LN1に対して最小となるので、この車線中心線LN1に対応した走行車線LA1を走行していると識別できる。また、他車両Va3の横位置(距離Dy)は、車線中心線LN2に対して最小となるので、この車線中心線LN2に対応した走行車線LA2を走行していると識別できる。
The lateral position of the other vehicle Va with respect to the lane center line LN will be described with reference to FIG.
The lateral position with respect to the lane center line LN is a distance Dy in the vehicle width direction from the center point in the vehicle width direction of the other vehicle Va to the lane center line LN closest to the other vehicle Va. Then, the lane center line LN that minimizes the lateral position (distance Dy) of the other vehicle Va with respect to the lane center line LN is selected, and the traveling lane LA corresponding to the lane center line LN is selected.
Accordingly, in FIG. 6, the lateral position (distance Dy) of the other vehicle Va1 is minimum with respect to the lane center line LN2, and therefore, it can be identified that the vehicle is traveling in the travel lane LA2 corresponding to the lane center line LN2. . Further, since the lateral position (distance Dy) of the other vehicle Va2 is minimum with respect to the lane center line LN1, it can be identified that the vehicle is traveling on the travel lane LA1 corresponding to the lane center line LN1. Further, since the lateral position (distance Dy) of the other vehicle Va3 is minimum with respect to the lane center line LN2, it can be identified that the vehicle is traveling on the travel lane LA2 corresponding to the lane center line LN2.
続くステップS105では、操作検出部14により、運転者による方向指示器の操作が検出されているか否かを判定する。ここで、方向指示器の操作が検出されていないときには、運転者は車線変更を望んでいないと判断して、そのまま所定のメインプログラムに復帰する。一方、方向指示器の操作が検出されているときには、運転者が車線変更を望んでいると判断してステップS106に移行する。
ステップS106では、運転者が車線変更しようとしている走行車線は、他車両Vaが走行する走行車線であるか否かを判定する。すなわち、指示方向の隣接車線に他車両Vaが走行しているか否かを判定する。ここで、指示方向の隣接車線に他車両Vaが存在しないときには、車線変更可能であると判断して、そのまま所定のメインプログラムに復帰する。一方、指示方向の隣接車線に他車両Vaが存在するときは、自車両Voの車線変更によって他車両Vaへ影響を及ぼす可能性があると判断してステップS107に移行する。他車両Vaへの影響とは、自車両Voの接近によって、他車両Vaに不必要な減速や操舵を強いるような事態を指す。
In subsequent step S105, the
In step S106, it is determined whether or not the travel lane that the driver is going to change the lane is a travel lane in which the other vehicle Va travels. That is, it is determined whether another vehicle Va is traveling in the adjacent lane in the indicated direction. Here, when there is no other vehicle Va in the adjacent lane in the indicated direction, it is determined that the lane can be changed, and the process returns to the predetermined main program as it is. On the other hand, when there is another vehicle Va in the adjacent lane in the indicated direction, it is determined that there is a possibility that the other vehicle Va may be affected by the lane change of the host vehicle Vo, and the process proceeds to step S107. The influence on the other vehicle Va refers to a situation in which unnecessary deceleration or steering is forced on the other vehicle Va due to the approach of the host vehicle Vo.
ステップS107では、自車両Voと他車両Vaとの車間距離Dxが、下記式の関係を満たすか否かを判定する。ここで、TTHWは目標車間時間であり、例えば2.0秒以上の値である。なお、車間時間(THW:Time-Headway)とは、車間距離Dxを車速Vで除算した値(Dx/V)である。したがって、下記式の右辺(V×TTHW)は、目標車間時間TTHWを達成するのに必要な目標車間距離となる。
Dx<V×TTHW
ここで、判定結果がDx≧V×TTHWであるときには、他車両Vaへの影響はないと判断して、そのまま所定のメインプログラムに復帰する。一方、判定結果がDx<V×TTHWであるときには、他車両Vaへの影響が発生し得ると判断してステップS108に移行する。
In step S107, it is determined whether the inter-vehicle distance Dx between the host vehicle Vo and the other vehicle Va satisfies the relationship of the following formula. Here, T THW is a target inter-vehicle time, for example, a value of 2.0 seconds or more. The inter-vehicle time (THW: Time-Headway) is a value (Dx / V) obtained by dividing the inter-vehicle distance Dx by the vehicle speed V. Therefore, the right side (V × T THW ) of the following equation is the target inter-vehicle distance necessary to achieve the target inter-vehicle time T THW .
Dx <V × T THW
Here, when the determination result is Dx ≧ V × T THW, it is determined that there is no influence on the other vehicle Va, and the process directly returns to the predetermined main program. On the other hand, when the determination result is Dx <V × T THW, it is determined that an influence on the other vehicle Va may occur, and the process proceeds to step S108.
続くステップS108では、車線変更に対して警報を出力する。すなわち、運転者が車線変更しようしている側には、後方から接近する他車両Vaが存在し、この他車両Vaに対して自車両Voが前後方向に接近してしまう旨を運転者に報知する。例えば、ディスプレイに警告を表示したり、警告灯を点灯させたり、警報音を発生させたり、ステアリングホイールを振動させたり、操舵反力を増加させたりする。こうして警報を出力してから所定のメインプログラムに復帰する。なお、他車両Vaへの影響が発生し得ると判定したときだけ、その旨を報知しているが、他車両Vaへの影響はないと判定したときには、その旨を報知してもよい。
上記が車線変更支援処理である。
In the subsequent step S108, an alarm is output for the lane change. That is, on the side where the driver is changing the lane, there is another vehicle Va approaching from behind, and the driver is notified that the own vehicle Vo approaches the other vehicle Va in the front-rear direction. To do. For example, a warning is displayed on the display, a warning light is turned on, an alarm sound is generated, a steering wheel is vibrated, or a steering reaction force is increased. After outputting an alarm in this way, the program returns to a predetermined main program. In addition, only when it determines with the influence on the other vehicle Va having generate | occur | produced, that is alert | reported, but when it determines with there being no influence on the other vehicle Va, you may alert | report that.
The above is the lane change support process.
《作用》
次に、第1実施形態の作用について説明する。
運転者が車線変更を意図して方向指示器を操作したときに、自車両が指示方向へと車線変更できるか否かを的確に判定するには、自車両Voよりも後方を走行している他車両Vaの走行車線LAを識別する必要がある。そこで、カメラ画像により、他車両Va及び通行区分線(白線)を検出し、他車両Vaの走行車線LAを識別することが考えられるが、例えば夜間や悪天候時のように、周囲の視認性が低下しているような状況では、その識別精度が低下してしまう。
<Action>
Next, the operation of the first embodiment will be described.
When the driver operates the direction indicator with the intention of changing the lane, in order to accurately determine whether or not the own vehicle can change the lane in the indicated direction, the vehicle is traveling behind the own vehicle Vo. It is necessary to identify the travel lane LA of the other vehicle Va. Therefore, it is conceivable to detect the other vehicle Va and the traffic dividing line (white line) from the camera image and identify the traveling lane LA of the other vehicle Va. For example, the visibility of the surroundings can be improved such as at night or in bad weather. In such a situation, the identification accuracy is lowered.
そこで、カメラと比べて、検出距離が長く、且つ視認性の低下にも影響されにくいレーダ部13を利用し、他車両Vaの走行車線LAを識別する。先ず、自車両Voの現在位置Po{xo,yo}の道路地図を取得し(ステップS101)、レーダ部13で自車両Voの周囲を走行している他車両Vaの相対位置Paを検出する(ステップS102)。そして、自車両の現在位置Po{xo,yo}を基準に、車線中心線LNを含む道路地図、及びレーダ部13で検出した他車両の相対位置Paを重畳する(ステップS103)。そして、各走行車線LAの車線中心線LNに対する他車両Vaの横位置が最小となる走行車線を、他車両Vaの走行車線LAとして識別する(ステップS104)。具体的には、各走行車線LAの車線中心線LNに対する他車両Vaの横位置(距離Dy)が最小となる走行車線LAを、他車両Vaの走行車線LAとして識別する。
このように、レーダ部13で他車両Vaを検出し、自車両Voを基準に道路地図及び他車両の相対位置Paを重畳したものを、他車両Vaの走行車線LAを識別するための指標としている。したがって、周囲の視認性が低下しているような状況でも、他車両Vaの走行車線LAを識別することができる。
Therefore, the traveling lane LA of the other vehicle Va is identified by using the
As described above, the
そして、操作検出部14が運転者の方向指示操作を検出したときに(ステップS105の判定が“Yes”)、走行車線識別部22の識別結果に応じて、自車両Voが運転者の指示方向へと車線変更できるか否かを判定する。ここでは、先ず指示方向の隣接車線に他車両Vaが存在するか否かに注目する。そして、指示方向の隣接車線に他車両Vaが存在しないときには(ステップS106の判定が“No”)、運転者の指示方向へと車線変更できると判定する。
一方、指示方向の隣接車線に他車両Vaが存在する場合は、自車両Voと他車両Vaとの接近度合に注目する。そして、自車両Voと他車両Vaとの車間距離Dxが目標車間距離(V×TTHW)以上であるときには(ステップS107の判定が“No”)、自車両Voが車線変更しても他車両Vaへの影響はないと判定する。
When the
On the other hand, when the other vehicle Va exists in the adjacent lane in the indicated direction, attention is paid to the degree of approach between the host vehicle Vo and the other vehicle Va. When the inter-vehicle distance Dx between the host vehicle Vo and the other vehicle Va is equal to or greater than the target inter-vehicle distance (V × T THW ) (the determination in step S107 is “No”), even if the host vehicle Vo changes lanes, the other vehicle It is determined that there is no effect on Va.
しかし、自車両Voと他車両Vaとの車間距離Dxが目標車間距離(V×TTHW)より小さいときには(ステップS107の判定が“Yes”)、他車両Vaへの影響が発生し得ると判定する。そして、車線変更に対して警報を出力する(ステップS108)。すなわち、運転者が車線変更しようしている側には、後方から接近する他車両Vaが存在し、この他車両Vaに対して自車両Voが前後方向に接近してしまう旨を、表示、音声、振動、制御介入等によって運転者に報知する。これにより、運転者に車線変更を控える、又は一時的に待機するよう促すことができる。そして、例えば他車両Vaが自車両Voを追い抜いたり、他車両Vaが車線変更したりしたときには、もはや自車両Voが隣へ車線変更しても、他車両Vaへの影響はないと判定し、警報を解除する。 However, when the inter-vehicle distance Dx between the host vehicle Vo and the other vehicle Va is smaller than the target inter-vehicle distance (V × T THW ) (determination in step S107 is “Yes”), it is determined that the influence on the other vehicle Va may occur. To do. Then, an alarm is output for the lane change (step S108). That is, a display and sound indicating that there is another vehicle Va approaching from behind on the side where the driver is changing the lane, and that the own vehicle Vo approaches the other vehicle Va in the front-rear direction. Notify the driver by vibration, control intervention, etc. This can prompt the driver to refrain from changing lanes or to wait temporarily. For example, when the other vehicle Va overtakes the host vehicle Vo or the other vehicle Va changes the lane, it is determined that the other vehicle Va no longer affects the other vehicle Va even if the host vehicle Vo changes to the next lane. Release the alarm.
《対応関係》
本実施形態では、地図情報取得部12、ステップS101の処理が「道路地図取得部」に対応する。レーダ部13、ステップS102の処理が「レーダ部」に対応する。走行車線識別部22、ステップS103、S104の処理が「走行車線識別部」に対応する。操作検出部14、ステップS105の処理が「操作検出部」に対応する。車線変更可否判定部23、ステップS106、S107の処理が「車線変更可否判定部」に対応する。報知部16、ステップS108の処理が「報知部」に対応する。
《Correspondence relationship》
In the present embodiment, the processing of the map
《効果》
次に、第1実施形態における主要部の効果を記す。
(1)本実施形態に係る走行車線識別装置は、地図情報取得部12が自車両Voの現在位置Poの道路地図を取得し、レーダ部13による照射波の出力及び反射波の入力によって、自車両Voの周囲を走行している他車両Vaの相対位置Paを検出する。そして、予め定めたXY座標で、自車両Voの現在位置Poを基準に、道路地図、及び他車両Vaの相対位置Paを重畳することにより、他車両Vaの走行車線LAを識別する。
このように、レーダ部13で他車両Vaを検出し、予め定めたXY座標で、自車両Voを基準に道路地図及び他車両の相対位置Paを重畳したものを、他車両Vaの走行車線LAを識別するための指標としている。したがって、周囲の視認性が低下しているような状況でも、他車両Vaの走行車線LAを識別することができる。
"effect"
Next, the effect of the main part in 1st Embodiment is described.
(1) In the traveling lane identification device according to the present embodiment, the map
As described above, the
(2)本実施形態に係る走行車線識別装置は、各走行車線LAの車線中心線LNに対する他車両Vaの横位置(距離Dy)が最小となる走行車線LAを、他車両Vaの走行車線LAとして識別する。
このように、車線中心線LNに対する横位置(距離Dy)が最小となる走行車線LAを検出するだけでよいので、他車両Vaの走行車線LAを容易に、且つ的確に識別することができる。
(2) The travel lane identification device according to the present embodiment uses the travel lane LA where the lateral position (distance Dy) of the other vehicle Va with respect to the lane center line LN of each travel lane LA is minimized as the travel lane LA of the other vehicle Va. Identify as.
In this way, since it is only necessary to detect the travel lane LA having the minimum lateral position (distance Dy) with respect to the lane center line LN, the travel lane LA of the other vehicle Va can be easily and accurately identified.
(3)本実施形態に係る車線変更支援装置は、操作検出部14が運転者の方向指示操作を検出したときに、車線変更可否判定部23が走行車線識別部22の識別結果に応じて、自車両Voが運転者の指示方向へと車線変更できるか否かを判定する。そして、報知部16が車線変更可否判定部23の判定結果を自車両Voの運転者に報知する。
このように、他車両Vaの走行車線LAに応じて、運転者の指示方向へと車線変更できるか否かを判定し、それを運転者に報知することで、車線変更によって他車両Vaに不必要に接近するリスクを低減することができる。
(3) In the lane change support device according to the present embodiment, when the
In this way, it is determined whether or not the lane can be changed in the direction indicated by the driver according to the travel lane LA of the other vehicle Va, and this is notified to the driver. The risk of approaching needs can be reduced.
(4)本実施形態に係る車線変更支援装置は、指示方向の隣接車線に他車両Vaが存在するか否かを判定し、他車両Vaが存在しないときは、運転者の指示方向へと車線変更できると判定する。
このように、指示方向の隣接車線に他車両Vaが存在するか否かに応じて、車線変更の可否を判定することにより、運転者の指示方向へと車線変更できるか否かを容易に、且つ的確に判定することができる。
(4) The lane change assist device according to the present embodiment determines whether or not another vehicle Va exists in the adjacent lane in the indicated direction, and when the other vehicle Va does not exist, the lane changes in the direction indicated by the driver. It is determined that it can be changed.
Thus, by determining whether or not the lane change is possible depending on whether or not another vehicle Va exists in the adjacent lane in the indicated direction, it is easy to determine whether or not the lane change can be made in the driver's indicated direction. And it can be determined accurately.
(5)本実施形態に係る車線変更支援装置は、指示方向の隣接車線に他車両Vaが存在する場合、他車両Vaと自車両Voとの車間距離Dxが目標車間距離(V×TTHW)以上であるときには、運転者の指示方向へと車線変更できると判定する。一方、車間距離Dxが目標車間距離(V×TTHW)より小さいときには、運転者の指示方向へは車線変更できないと判定する。
このように、他車両Vaの走行車線LAだけではなく、他車両Vaとの相対的な位置関係に応じて、車線変更の可否を判定することにより、運転者の指示方向へと車線変更できるか否かを容易に、且つ的確に判定することができる。
(5) In the lane change assist device according to the present embodiment, when another vehicle Va is present in the adjacent lane in the indicated direction, the inter-vehicle distance Dx between the other vehicle Va and the host vehicle Vo is the target inter-vehicle distance (V × T THW ). When it is above, it is determined that the lane can be changed in the direction indicated by the driver. On the other hand, when the inter-vehicle distance Dx is smaller than the target inter-vehicle distance (V × T THW ), it is determined that the lane cannot be changed in the direction indicated by the driver.
In this way, whether the lane can be changed in the direction indicated by the driver by determining whether the lane can be changed according to the relative positional relationship with the other vehicle Va as well as the travel lane LA of the other vehicle Va. Whether or not can be determined easily and accurately.
(6)本実施形態に係る走行車線識別方法は、地図情報取得部12が自車両Voの現在位置Poの道路地図を取得し、レーダ部13による照射波の出力及び反射波の入力によって、自車両Voの周囲を走行している他車両Vaの相対位置Paを検出する。そして、予め定めたXY座標で、自車両Voの現在位置Poを基準に、道路地図、及び他車両Vaの相対位置Paを重畳することにより、他車両Vaの走行車線LAを識別する。
このように、レーダ部13で他車両Vaを検出し、予め定めたXY座標で、自車両Voを基準に道路地図及び他車両の相対位置Paを重畳したものを、他車両Vaの走行車線LAを識別するための指標としている。したがって、周囲の視認性が低下しているような状況でも、他車両Vaの走行車線LAを識別することができる。
(6) In the traveling lane identification method according to the present embodiment, the map
As described above, the
《第2実施形態》
《構成》
本実施形態は、自車両よりも後方を走行している複数の他車両Vaが存在するときに、各他車両Vaの走行車線LAを、高精度に識別するものである。
装置構成は、前述した第1実施形態と同じである。
走行車線識別部22で実行する走行車線識別処理を、図8のフローチャートに基づいて説明する。
<< Second Embodiment >>
"Constitution"
In the present embodiment, when there are a plurality of other vehicles Va traveling behind the host vehicle, the traveling lane LA of each other vehicle Va is identified with high accuracy.
The apparatus configuration is the same as that of the first embodiment described above.
A travel lane identification process executed by the travel
先ずステップS201では、自車両Voよりも後方を走行している複数の他車両Vaを後方車群Vgとし、後方車群Vgが存在するか否かを判定する。ここで、後方車群Vgが存在しないときには、前述した第1実施形態のステップS104により、走行車線の識別を行い、それから所定のメインプログラムに復帰する。一方、後方車群Vgが存在するときにはステップS202に移行する。
ステップS202では、後方車群Vgのうち、一台の他車両Vaを基準車両Vsとして選出する。
First, in step S201, a plurality of other vehicles Va traveling behind the host vehicle Vo are set as the rear vehicle group Vg, and it is determined whether or not the rear vehicle group Vg exists. Here, when the rear vehicle group Vg does not exist, the travel lane is identified in step S104 of the first embodiment described above, and then the process returns to a predetermined main program. On the other hand, when the rear vehicle group Vg exists, the process proceeds to step S202.
In step S202, one other vehicle Va in the rear vehicle group Vg is selected as the reference vehicle Vs.
基準車両Vsの選出を、図9に基づいて説明する。
ここでは、三台の他車両Vaを検出しており、自車両Voに近い側から順に、他車両Va1、Va2、Va3とする。これら三台の他車両Vaが後方車群Vgである。XY座標上で、基準車両Vsを選出する領域Asは、後方車群Vgのうち、自車両Voに対して最も遠い他車両Va3の位置から、予め定めた距離Dsだけ自車両Voに近い範囲とする。予め定めた距離Dsは、例えば下記式によって求める。ここで、Dx3は自車両Voから最も遠い他車両Va3までの距離である。また、Wは車線幅であり、例えば3.5[m]程度である。また、αは車体幅であり、例えば1.8[m]程度である。
Ds=Dx3×{1−W/(W+α)}
ここでは、領域Asに他車両Va2及び他車両Va3が含まれるため、どちらを選んでもよいが、例えば他車両Va3を基準車両Vsとして選ぶ。
The selection of the reference vehicle Vs will be described with reference to FIG.
Here, three other vehicles Va are detected, and are set as other vehicles Va1, Va2, Va3 in order from the side closer to the host vehicle Vo. These three other vehicles Va are the rear vehicle group Vg. The region As for selecting the reference vehicle Vs on the XY coordinates is a range close to the host vehicle Vo by a predetermined distance Ds from the position of the other vehicle Va3 farthest from the host vehicle Vo in the rear vehicle group Vg. To do. The predetermined distance Ds is obtained by the following formula, for example. Here, Dx3 is a distance from the host vehicle Vo to the farthest other vehicle Va3. W is the lane width, for example, about 3.5 [m]. Α is a vehicle body width, for example, about 1.8 [m].
Ds = Dx3 × {1-W / (W + α)}
Here, since the other vehicle Va2 and the other vehicle Va3 are included in the region As, whichever may be selected, for example, the other vehicle Va3 is selected as the reference vehicle Vs.
続くステップS203では、後方車群Vgのうち、基準車両Vs(=Va3)よりも自車両に近い位置にいる一台の他車両を評価車両Veとして選出する。
評価車両Veの選出を、図10に基づいて説明する。
XY座標上で、評価車両Veを選出する領域Aeは、後方車群Vgのうち、基準車両Vs(=Va3)よりも予め定めた距離De以上、自車両Voに近い側とする。予め定めた距離Deとは、例えば10[m]程度である。ここでは、領域Aeに他車両Va1だけしか含まれないため、他車両Va1を評価車両Veとして選ぶ。
続くステップS204では、XY座標上で、基準車両Vs(=Va3)が各走行車線LAの車線中心線LN上に配置されるように、後方車群Vgを、自車両Voを中心に回転移動させる。
In the subsequent step S203, one other vehicle that is closer to the host vehicle than the reference vehicle Vs (= Va3) in the rear vehicle group Vg is selected as the evaluation vehicle Ve.
Selection of the evaluation vehicle Ve will be described with reference to FIG.
The area Ae for selecting the evaluation vehicle Ve on the XY coordinates is set to be closer to the host vehicle Vo by a predetermined distance De than the reference vehicle Vs (= Va3) in the rear vehicle group Vg. The predetermined distance De is, for example, about 10 [m]. Here, since only the other vehicle Va1 is included in the area Ae, the other vehicle Va1 is selected as the evaluation vehicle Ve.
In subsequent step S204, the rear vehicle group Vg is rotated about the host vehicle Vo so that the reference vehicle Vs (= Va3) is arranged on the lane center line LN of each travel lane LA on the XY coordinates. .
後方車群Vgの回転移動を、図11〜図13に基づいて説明する。
ここでは、ここでは、片側三車線となる道路とし、左の走行車線をLA1、中央の走行車線をLA2とし、右の走行車線をLA3としている。また、走行車線LA1の車線中心線をLN1、走行車線LA2の車線中心線をLN2、走行車線LA3の車線中心線をLN3としている。
そして、図11では、基準車両Vs(=Va3)を、左の走行車線をLA1の車線中心線をLN1上に配置されるように、後方車群Vgを、自車両Voを中心に回転移動させている。また、図12では、基準車両Vs(=Va3)を、中央の走行車線をLA2の車線中心線をLN2上に配置されるように、後方車群Vgを、自車両Voを中心に回転移動させている。また、図13では、基準車両Vs(=Va3)を、右の走行車線をLA3の車線中心線をLN3上に配置されるように、後方車群Vgを、自車両Voを中心に回転移動させている。
The rotational movement of the rear vehicle group Vg will be described with reference to FIGS.
Here, the road is a three-lane road on one side, the left lane is LA1, the center lane is LA2, and the right lane is LA3. The lane center line of the travel lane LA1 is LN1, the lane center line of the travel lane LA2 is LN2, and the lane center line of the travel lane LA3 is LN3.
In FIG. 11, the rear vehicle group Vg is rotated around the host vehicle Vo so that the reference vehicle Vs (= Va3) is arranged on the left travel lane on the LN1 lane centerline of LA1. ing. In FIG. 12, the rear vehicle group Vg is rotated around the host vehicle Vo so that the reference vehicle Vs (= Va3) is placed on the center lane of the LA2 and the lane centerline of the LA2 on the LN2. ing. In FIG. 13, the reference vehicle Vs (= Va3) is rotated around the host vehicle Vo so that the rear vehicle group Vg is centered on the host vehicle Vo so that the right travel lane is placed on the lane center line of LA3 on LN3. ing.
続くステップS205では、各他車両Va1〜Va3の走行車線LAを識別する。
先ず、後方車群Vgを回転移動させたときの各状態で、評価車両Ve(=Va1)に最も近い車線中心線LNを選び、その車線中心線LNに対する評価車両Ve(=Va1)の横位置を検出する。この横位置とは、評価車両Ve(=Va1)の車幅方向中心点から、車線中心線LN2までの直交方向の距離Dyである。
先ず、図11では、評価車両Ve(=Va1)は、車線中心線LN1〜LN3のうち、LN2に最も近くなるので、この車線中心線LN2に対する評価車両Ve(=Va1)の横位置(距離Dy)を検出する。また、図12では、評価車両Ve(=Va1)は、車線中心線LN1〜LN3のうち、LN2に最も近くなるので、この車線中心線LN2に対する評価車両Ve(=Va1)の横位置(距離Dy)を検出する。また、図13では、評価車両Ve(=Va1)は、車線中心線LN1〜LN3のうち、LN3に最も近くなるので、この車線中心線LN3に対する評価車両Ve(=Va1)の横位置(距離Dy)を検出する。
In the subsequent step S205, the travel lane LA of each of the other vehicles Va1 to Va3 is identified.
First, in each state when the rear vehicle group Vg is rotated, the lane center line LN closest to the evaluation vehicle Ve (= Va1) is selected, and the lateral position of the evaluation vehicle Ve (= Va1) with respect to the lane center line LN Is detected. This lateral position is a distance Dy in the orthogonal direction from the center point in the vehicle width direction of the evaluation vehicle Ve (= Va1) to the lane center line LN2.
First, in FIG. 11, the evaluation vehicle Ve (= Va1) is closest to LN2 among the lane centerlines LN1 to LN3. Therefore, the lateral position (distance Dy) of the evaluation vehicle Ve (= Va1) with respect to the lane centerline LN2 ) Is detected. In FIG. 12, the evaluation vehicle Ve (= Va1) is closest to LN2 among the lane centerlines LN1 to LN3. Therefore, the lateral position (distance Dy) of the evaluation vehicle Ve (= Va1) with respect to the lane centerline LN2 ) Is detected. In FIG. 13, the evaluation vehicle Ve (= Va1) is closest to LN3 among the lane centerlines LN1 to LN3. Therefore, the lateral position (distance Dy) of the evaluation vehicle Ve (= Va1) with respect to the lane centerline LN3. ) Is detected.
そして、各横位置(距離Dy)のうち、最小となる配置を選ぶ。ここでは、図12の配置となる。この配置で、各走行車線LAの車線中心線LNに対する他車両Vaの横位置が最小となる走行車線を、他車両Vaの走行車線LAとして識別する。すなわち、他車両Va1の横位置(距離Dy)は、車線中心線LN2に対して最小となるので、この車線中心線LN2に対応した走行車線LA2を走行していると識別できる。また、他車両Va2の横位置(距離Dy)は、車線中心線LN1に対して最小となるので、この車線中心線LN1に対応した走行車線LA1を走行していると識別できる。また、他車両Va3の横位置(距離Dy)は、車線中心線LN2に対して最小となるので、この車線中心線LN2に対応した走行車線LA2を走行していると識別できる。
こうして、各他車両Va1〜Va3の走行車線LAを識別してから、所定のメインプログラムに復帰する。
上記が走行車線識別処理である。
Then, the smallest arrangement is selected from each horizontal position (distance Dy). Here, the arrangement is as shown in FIG. With this arrangement, the travel lane in which the lateral position of the other vehicle Va with respect to the lane center line LN of each travel lane LA is minimized is identified as the travel lane LA of the other vehicle Va. That is, since the lateral position (distance Dy) of the other vehicle Va1 is minimum with respect to the lane center line LN2, it can be identified that the vehicle is traveling in the travel lane LA2 corresponding to the lane center line LN2. Further, since the lateral position (distance Dy) of the other vehicle Va2 is minimum with respect to the lane center line LN1, it can be identified that the vehicle is traveling on the travel lane LA1 corresponding to the lane center line LN1. Further, since the lateral position (distance Dy) of the other vehicle Va3 is minimum with respect to the lane center line LN2, it can be identified that the vehicle is traveling on the travel lane LA2 corresponding to the lane center line LN2.
Thus, after identifying the travel lane LA of each of the other vehicles Va1 to Va3, the process returns to a predetermined main program.
The above is the traveling lane identification process.
《作用》
次に、第2実施形態の作用について説明する。
自車両Voよりも後方を走行している複数の他車両Vaが存在する場合は、これを後方車群Vgとしてグループ化して、総合的に走行車線LAを識別すると、より識別精度を向上させることができる。先ず、後方車群Vgのうち、一台の他車両Vaを基準車両Vsとして選出し(ステップS202)、且つ基準車両Vsよりも自車両Voに近い位置にいる一台の他車両Vaを評価車両Veとして選出する(ステップS203)。そして、平面座標で、基準車両Vsが各走行車線LAの車線中心線LN上に配置されるように、後方車群Vgを、自車両Voを中心に回転移動させる(ステップS204)。
<Action>
Next, the operation of the second embodiment will be described.
When there are a plurality of other vehicles Va traveling behind the host vehicle Vo, grouping them as a rear vehicle group Vg and comprehensively identifying the traveling lane LA can improve the identification accuracy. Can do. First, in the rear vehicle group Vg, one other vehicle Va is selected as the reference vehicle Vs (step S202), and one other vehicle Va that is closer to the host vehicle Vo than the reference vehicle Vs is evaluated. Selected as Ve (step S203). Then, the rear vehicle group Vg is rotated about the host vehicle Vo so that the reference vehicle Vs is arranged on the lane center line LN of each travel lane LA in the plane coordinates (step S204).
そして、後方車群Vgの回転移動により、車線中心線LNに対する評価車両Veの横位置が最小となるときの回転移動位置を選ぶ。そして、その回転移動位置で、他車両Vaごとに、各走行車線LAの車線中心線LNに対する横位置(距離Dy)が最小となる走行車線LAを、他車両Vaの走行車線LAとして識別する。
このように、自車両Voよりも後方を走行している複数の他車両Vaが存在する場合、これを後方車群Vgとしてグループ化して、総合的に走行車線LAを識別することで、より識別精度を向上させることができる。
Then, the rotational movement position when the lateral position of the evaluation vehicle Ve with respect to the lane center line LN is minimized by the rotational movement of the rear vehicle group Vg is selected. Then, the travel lane LA in which the lateral position (distance Dy) of each travel lane LA with respect to the lane center line LN is minimized is identified as the travel lane LA of the other vehicle Va at the rotational movement position.
As described above, when there are a plurality of other vehicles Va traveling behind the host vehicle Vo, these are grouped as the rear vehicle group Vg, and the traveling lane LA is comprehensively identified, thereby further identifying. Accuracy can be improved.
また、後方車群Vgのうち、自車両Voに対して最も遠い他車両Vaの位置から、予め定めた距離Dsだけ自車両Voに近い範囲内で、基準車両Vsを選出する。このように、自車両Voから遠方の他車両Vaを基準にすることで、各他車両Vaの走行車線LAを、高精度に識別することができる。
また、基準車両Vsよりも予め定めた距離De以上、自車両Voに近い側で、評価車両Veを選出する。このように、自車両Voに近い側の他車両Vaを用い、回転移動の妥当性を評価することで、各他車両Vaの走行車線LAを、高精度に識別することができる。
本実施形態において、前述した第1実施形態と共通する他の部分については、同様の作用効果が得られるものとし、詳細な説明は省略する。
Further, in the rear vehicle group Vg, the reference vehicle Vs is selected from a position of the other vehicle Va farthest from the own vehicle Vo within a range close to the own vehicle Vo by a predetermined distance Ds. In this way, the travel lane LA of each other vehicle Va can be identified with high accuracy by using the other vehicle Va far from the host vehicle Vo as a reference.
In addition, the evaluation vehicle Ve is selected on the side closer to the host vehicle Vo by the distance De or more than the reference vehicle Vs. Thus, by using the other vehicle Va on the side close to the host vehicle Vo and evaluating the validity of the rotational movement, the travel lane LA of each other vehicle Va can be identified with high accuracy.
In the present embodiment, the same operation and effect are obtained for the other parts common to the first embodiment described above, and detailed description thereof is omitted.
《変形例》
本実施形態では、単に基準車両Vsよりも予め定めた距離De以上、自車両Voに近い側で、評価車両Veを選出しているが、さらに条件を加えてもよい。例えば、自車両Voに対する相対的な横位置が、予め定めた範囲内の他車両Vaを選出する。このように、条件を追加することにより、他車両Vaが多数存在するような状況で、演算負担を軽減することができる。
<Modification>
In the present embodiment, the evaluation vehicle Ve is simply selected on the side closer to the host vehicle Vo by the distance De or more than the reference vehicle Vs, but further conditions may be added. For example, another vehicle Va whose relative lateral position with respect to the host vehicle Vo is within a predetermined range is selected. Thus, by adding the conditions, it is possible to reduce the calculation burden in a situation where there are many other vehicles Va.
《対応関係》
本実施形態では、ステップS202の処理が「基準車両選出部」に対応する。また、ステップS203の処理が「評価車両選出部」に対応する。また、ステップS204の処理が「座標変換部」に対応する。また、ステップS205、S104の処理が「走行車線識別部」に対応する。
《Correspondence relationship》
In the present embodiment, the process of step S202 corresponds to a “reference vehicle selection unit”. Further, the process of step S203 corresponds to an “evaluation vehicle selection unit”. Further, the processing in step S204 corresponds to a “coordinate conversion unit”. Further, the processing in steps S205 and S104 corresponds to the “traveling lane identification unit”.
《効果》
次に、第2実施形態における主要部の効果を記す。
(1)本実施形態に係る走行車線識別装置は、自車両Voよりも後方を走行している複数の他車両Vaを後方車群Vgとする。そして、後方車群Vgのうち、一台の他車両Vaを基準車両Vsとして選出し、基準車両Vsよりも自車両Voに近い位置にいる一台の他車両Vaを評価車両Veとして選出する。そして、平面座標で、基準車両Vsが各走行車線LAの車線中心線LN上に配置されるように、後方車群Vgを、自車両Voを中心に回転移動させる。そして、後方車群Vgの回転移動により、車線中心線LNに対する評価車両Veの横位置が最小となるときの回転移動位置を選ぶ。そして、その回転移動位置で、他車両Vaごとに、各走行車線LAの車線中心線LNに対する横位置(距離Dy)が最小となる走行車線LAを、他車両Vaの走行車線LAとして識別する。
このように、自車両Voよりも後方を走行している複数の他車両Vaが存在する場合、これを後方車群Vgとしてグループ化して、総合的に走行車線LAを識別することで、より識別精度を向上させることができる。
"effect"
Next, the effect of the main part in 2nd Embodiment is described.
(1) The traveling lane identification device according to the present embodiment sets a plurality of other vehicles Va traveling behind the host vehicle Vo as a rear vehicle group Vg. In the rear vehicle group Vg, one other vehicle Va is selected as the reference vehicle Vs, and one other vehicle Va located closer to the host vehicle Vo than the reference vehicle Vs is selected as the evaluation vehicle Ve. Then, the rear vehicle group Vg is rotated about the host vehicle Vo so that the reference vehicle Vs is arranged on the lane center line LN of each travel lane LA in the plane coordinates. Then, the rotational movement position when the lateral position of the evaluation vehicle Ve with respect to the lane center line LN is minimized by the rotational movement of the rear vehicle group Vg is selected. Then, the travel lane LA in which the lateral position (distance Dy) of each travel lane LA with respect to the lane center line LN is minimized is identified as the travel lane LA of the other vehicle Va at the rotational movement position.
As described above, when there are a plurality of other vehicles Va traveling behind the host vehicle Vo, these are grouped as the rear vehicle group Vg, and the traveling lane LA is comprehensively identified, thereby further identifying. Accuracy can be improved.
(2)本実施形態に係る走行車線識別装置は、後方車群Vgのうち、自車両Voに対して最も遠い他車両Vaの位置から、予め定めた距離Dsだけ自車両Voに近い範囲内で、基準車両Vsを選出する。
このように、自車両Voから遠方の他車両Vaを基準にすることで、各他車両Vaの走行車線LAを、高精度に識別することができる。
(2) The travel lane identification device according to the present embodiment is within a range close to the host vehicle Vo by a predetermined distance Ds from the position of the other vehicle Va farthest from the host vehicle Vo in the rear vehicle group Vg. A reference vehicle Vs is selected.
In this way, the travel lane LA of each other vehicle Va can be identified with high accuracy by using the other vehicle Va far from the host vehicle Vo as a reference.
(3)本実施形態に係る走行車線識別装置は、基準車両Vsよりも予め定めた距離De以上、自車両Voに近い側で、評価車両Veを選出する。
このように、自車両Voに近い側の他車両Vaを用い、回転移動の妥当性を評価することで、各他車両Vaの走行車線LAを、高精度に識別することができる。
(3) The traveling lane identification device according to the present embodiment selects the evaluation vehicle Ve on the side closer to the host vehicle Vo by the distance De or more than the reference vehicle Vs.
Thus, by using the other vehicle Va on the side close to the host vehicle Vo and evaluating the validity of the rotational movement, the travel lane LA of each other vehicle Va can be identified with high accuracy.
以上、限られた数の実施形態を参照しながら説明したが、権利範囲はそれらに限定されるものではなく、上記の開示に基づく実施形態の改変は、当業者にとって自明のことである。また、各実施形態は、任意に組み合わせて採用することができる。 Although the present invention has been described with reference to a limited number of embodiments, the scope of rights is not limited thereto, and modifications of the embodiments based on the above disclosure are obvious to those skilled in the art. Moreover, each embodiment can be adopted in any combination.
11 車線変更支援装置
12 走行状態検出部
13 レーダ部
14 操作検出部
15 コントローラ
16 報知部
17 走行車線識別装置
22 走行車線識別部
23 進路変更可否判定部
31 車輪速センサ
DESCRIPTION OF
Claims (8)
照射波の出力及び反射波の入力により、自車両の周囲を走行している他車両の相対位置を検出するレーダ部と、
予め定めた平面座標で、自車両の現在位置を基準に、前記道路地図取得部で取得した道路地図、及び前記レーダ部で検出した他車両の相対位置を重畳することにより、前記他車両の走行車線を識別する走行車線識別部と、を備え、
前記走行車線識別部は、
自車両よりも後方を走行している複数の前記他車両を後方車群とし、前記後方車群のうち、一台の他車両を基準車両として選出する基準車両選出部と、
前記後方車群のうち、前記基準車両よりも自車両に近い位置にいる一台の他車両を評価車両として選出する評価車両選出部と、
前記平面座標で、前記基準車両が各走行車線の車線中心線上に配置されるように、前記後方車群を、自車両を中心に回転移動させる座標変換部と、を備え、
前記座標変換部による前記後方車群の回転移動により、前記車線中心線に対する前記評価車両の横位置が最小となるときの回転移動位置で、前記他車両ごとに、各走行車線の車線中心線に対する横位置が最小となる走行車線を、前記他車両の走行車線として識別することを特徴とする走行車線識別装置。 A road map acquisition unit that acquires a road map of the current position of the vehicle;
A radar unit that detects a relative position of another vehicle that is traveling around the host vehicle by outputting an irradiation wave and inputting a reflected wave;
Based on the current position of the host vehicle with a predetermined plane coordinate, the road map acquired by the road map acquisition unit and the relative position of the other vehicle detected by the radar unit are superimposed, thereby driving the other vehicle. A traveling lane identification unit that identifies a lane ,
The travel lane identification unit is
A plurality of other vehicles traveling behind the host vehicle as a rear vehicle group, and a reference vehicle selection unit that selects one other vehicle as a reference vehicle from the rear vehicle group,
An evaluation vehicle selection unit that selects one other vehicle as an evaluation vehicle in the rear vehicle group that is closer to the host vehicle than the reference vehicle;
A coordinate conversion unit for rotating the rear vehicle group about the host vehicle so that the reference vehicle is arranged on the lane center line of each traveling lane in the plane coordinates,
The rotational movement position when the lateral position of the evaluation vehicle with respect to the lane center line is minimized by the rotational movement of the rear lane by the coordinate conversion unit, for each of the other vehicles, with respect to the lane center line of each traveling lane. A travel lane identification device that identifies a travel lane having a minimum lateral position as a travel lane of the other vehicle .
各走行車線の車線中心線に対する前記他車両の横位置が最小となる走行車線を、前記他車両の走行車線として識別することを特徴とする請求項1に記載の走行車線識別装置。 The travel lane identification unit is
The travel lane identification device according to claim 1, wherein a travel lane in which a lateral position of the other vehicle with respect to a lane center line of each travel lane is minimum is identified as a travel lane of the other vehicle.
前記後方車群のうち、自車両に対して最も遠い他車両の位置から、予め定めた距離だけ自車両に近い範囲内で、前記基準車両を選出することを特徴とする請求項1又は2に記載の走行車線識別装置。 The reference vehicle selection unit
Of the rear wheel group, the position of the farthest other vehicle relative to the host vehicle, distance within a range close to the vehicle a predetermined, to claim 1 or 2, characterized in that selecting the reference vehicle The travel lane identification device described.
前記基準車両よりも予め定めた距離以上、自車両に近い側で、前記評価車両を選出することを特徴とする請求項1〜3の何れか一項に記載の走行車線識別装置。 The evaluation vehicle selection unit
The travel lane identification device according to any one of claims 1 to 3 , wherein the evaluation vehicle is selected on the side closer to the host vehicle for a predetermined distance or more than the reference vehicle.
運転者の方向指示操作を検出する操作検出部と、
前記操作検出部が運転者の方向指示操作を検出したときに、前記走行車線識別部の識別結果に応じて、自車両が運転者の指示方向へと車線変更できるか否かを判定する車線変更可否判定部と、
前記車線変更可否判定部の判定結果を自車両の運転者に報知する報知部と、を備えることを特徴とする車線変更支援装置。 A traveling lane identification device according to any one of claims 1 to 4 ,
An operation detection unit that detects a driver's direction instruction operation;
When the operation detection unit detects a direction instruction operation of the driver, a lane change that determines whether or not the host vehicle can change the lane to the direction indicated by the driver according to the identification result of the traveling lane identification unit A determination unit;
A lane change support device, comprising: a notification unit that notifies a driver of the host vehicle of a determination result of the lane change permission determination unit.
指示方向の隣接車線に前記他車両が存在するか否かを判定し、前記他車両が存在しないときには、運転者の指示方向へと車線変更できると判定することを特徴とする請求項5に記載の車線変更支援装置。 The lane change permission determination unit
6. The method according to claim 5 , wherein it is determined whether or not the other vehicle is present in an adjacent lane in the indicated direction, and when the other vehicle is not present, it is determined that the lane can be changed in the direction indicated by the driver. Lane change support device.
指示方向の隣接車線に前記他車両が存在するか否かを判定し、前記他車両が存在する場合、前記他車両と自車両との前後方向の車間距離が予め定めた目標車間距離以上であるときには、運転者の指示方向へと車線変更できると判定し、前記車間距離が前記目標車間距離より小さいときには、運転者の指示方向へは車線変更できないと判定することを特徴とする請求項5又は6に記載の車線変更支援装置。 The lane change permission determination unit
It is determined whether or not the other vehicle exists in the adjacent lane in the indicated direction. If the other vehicle exists, the front-rear distance between the other vehicle and the host vehicle is equal to or greater than a predetermined target inter-vehicle distance. sometimes, it is determined that it lane change to the pointing direction of the driver, when the vehicle distance is smaller than the target inter-vehicle distance, the pointing direction of the driver and judging can not be change lanes claim 5 or 6. The lane change assisting device according to 6 .
自車両よりも後方を走行している複数の前記他車両を後方車群とし、前記後方車群のうち、一台の他車両を基準車両として選出し、前記後方車群のうち、前記基準車両よりも自車両に近い位置にいる一台の他車両を評価車両として選出し、前記平面座標で、前記基準車両が各走行車線の車線中心線上に配置されるように、前記後方車群を、自車両を中心に回転移動させ、前記後方車群の回転移動により、前記車線中心線に対する前記評価車両の横位置が最小となるときの回転移動位置で、前記他車両ごとに、各走行車線の車線中心線に対する横位置が最小となる走行車線を、前記他車両の走行車線として識別することを特徴とする走行車線識別方法。 A road map of the current position of the host vehicle is acquired, and the relative position of other vehicles traveling around the host vehicle is detected by the output of the irradiation wave and the input of the reflected wave by the radar unit. The road map of the other vehicle is identified by superimposing the relative position of the road map and the other vehicle with reference to the current position of the own vehicle ,
A plurality of other vehicles traveling behind the host vehicle are set as a rear vehicle group, one other vehicle is selected as a reference vehicle among the rear vehicle groups, and the reference vehicle is selected among the rear vehicle groups. Selecting one other vehicle closer to the vehicle than the vehicle as an evaluation vehicle, and in the plane coordinates, the reference vehicle is arranged on the lane center line of each traveling lane, A rotational movement position when the lateral position of the evaluation vehicle with respect to the lane center line is minimized by rotating the rear vehicle group around the host vehicle, and for each other vehicle lane. A traveling lane identification method , wherein a traveling lane having a minimum lateral position with respect to a lane center line is identified as a traveling lane of the other vehicle .
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014035006A JP6323064B2 (en) | 2014-02-26 | 2014-02-26 | Traveling lane identification device, lane change support device, traveling lane identification method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014035006A JP6323064B2 (en) | 2014-02-26 | 2014-02-26 | Traveling lane identification device, lane change support device, traveling lane identification method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015161968A JP2015161968A (en) | 2015-09-07 |
| JP6323064B2 true JP6323064B2 (en) | 2018-05-16 |
Family
ID=54185050
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014035006A Active JP6323064B2 (en) | 2014-02-26 | 2014-02-26 | Traveling lane identification device, lane change support device, traveling lane identification method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6323064B2 (en) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109074737B (en) | 2016-04-28 | 2021-04-02 | 住友电气工业株式会社 | Safe driving assistance systems, servers, vehicles, and programs |
| CN109074727B (en) | 2016-04-28 | 2021-03-30 | 住友电气工业株式会社 | Safe driving assistance system, vehicle, and non-transitory computer-readable recording medium |
| JP6823651B2 (en) | 2016-04-28 | 2021-02-03 | 住友電気工業株式会社 | Recommended driving speed provision program, driving support system, vehicle control device and autonomous vehicle |
| DE102016209232B4 (en) * | 2016-05-27 | 2022-12-22 | Volkswagen Aktiengesellschaft | Method, device and computer-readable storage medium with instructions for determining the lateral position of a vehicle relative to the lanes of a roadway |
| JP7001541B2 (en) * | 2018-06-04 | 2022-01-19 | 本田技研工業株式会社 | Vehicle control devices, vehicle control methods and programs |
| US10935977B2 (en) * | 2018-06-28 | 2021-03-02 | Aptiv Technologies Limited | Lane assignment system |
| EP3588006B1 (en) | 2018-06-28 | 2021-08-11 | Continental Automotive GmbH | Determining visibility distances based a on dynamic field of view of a vehicle |
| CN110751827B (en) * | 2018-07-24 | 2021-03-02 | 东旭光电科技股份有限公司 | Method and device for outputting prompt information, intelligent street lamp and readable storage medium |
| JP7505706B2 (en) * | 2020-01-20 | 2024-06-25 | 株式会社中電工 | Alarm system |
| CN111882870B (en) * | 2020-07-14 | 2022-07-01 | 吉林大学 | Quantification method of road traffic environment |
| CN112488150B (en) * | 2020-11-04 | 2023-04-07 | 浙江吉利控股集团有限公司 | Target correction method, device and system based on vehicle-road cooperation and storage medium |
| JP7435426B2 (en) | 2020-12-08 | 2024-02-21 | 株式会社デンソー | Vehicle control device |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003215241A (en) * | 2002-01-28 | 2003-07-30 | Matsushita Electric Works Ltd | On-vehicle radar apparatus |
| JP2003296899A (en) * | 2002-03-29 | 2003-10-17 | Toyota Central Res & Dev Lab Inc | Leading vehicle determination device |
| JP2012234373A (en) * | 2011-05-02 | 2012-11-29 | Mitsubishi Motors Corp | Driving support device |
-
2014
- 2014-02-26 JP JP2014035006A patent/JP6323064B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015161968A (en) | 2015-09-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6323064B2 (en) | Traveling lane identification device, lane change support device, traveling lane identification method | |
| JP6323063B2 (en) | Traveling lane identification device, lane change support device, traveling lane identification method | |
| US10643474B2 (en) | Vehicle control device, vehicle control method, and recording medium | |
| CN107284454B (en) | Anti-collision device and anti-collision method | |
| RU2722807C1 (en) | Vehicle status indication system | |
| US9688272B2 (en) | Surroundings monitoring apparatus and drive assistance apparatus | |
| US7797108B2 (en) | Collision avoidance system and method of aiding rearward vehicular motion | |
| US9884585B1 (en) | Exterior vehicle alerting system | |
| EP3141926B1 (en) | Automated detection of hazardous drifting vehicles by vehicle sensors | |
| US8855910B2 (en) | Moving body anti-collision device and moving body with the same | |
| KR20200102004A (en) | Apparatus, system and method for preventing collision | |
| JP6639194B2 (en) | Information display device | |
| US20190071071A1 (en) | Vehicle control device, vehicle control method, and storage medium | |
| US11345279B2 (en) | Device and method for warning a driver of a vehicle | |
| CN106114217A (en) | Travel controlling system | |
| JP2016124479A (en) | Vehicle travel control device | |
| JPWO2010073333A1 (en) | Driving assistance device | |
| JP2008037361A (en) | Obstacle recognition device | |
| WO2017104209A1 (en) | Driving assistance device | |
| JP2013033324A (en) | Surrounding vehicle information notifying device | |
| US10549762B2 (en) | Distinguish between vehicle turn and lane change | |
| US20230311864A1 (en) | Drive assist apparatus for vehicle and drive assist system for vehicle | |
| JP2019028841A (en) | Outside alarm system | |
| JP2015121959A (en) | Obstacle detection device | |
| JP2016210380A (en) | Travel control device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161226 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171005 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171024 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171211 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180313 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180326 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6323064 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |