JP6183554B2 - Periodic disturbance automatic suppression device - Google Patents
Periodic disturbance automatic suppression device Download PDFInfo
- Publication number
- JP6183554B2 JP6183554B2 JP2016525718A JP2016525718A JP6183554B2 JP 6183554 B2 JP6183554 B2 JP 6183554B2 JP 2016525718 A JP2016525718 A JP 2016525718A JP 2016525718 A JP2016525718 A JP 2016525718A JP 6183554 B2 JP6183554 B2 JP 6183554B2
- Authority
- JP
- Japan
- Prior art keywords
- current
- value
- periodic disturbance
- error correction
- command value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000000737 periodic effect Effects 0.000 title claims description 64
- 230000001629 suppression Effects 0.000 title claims description 42
- 238000006243 chemical reaction Methods 0.000 claims description 22
- 238000001514 detection method Methods 0.000 claims description 15
- 238000010586 diagram Methods 0.000 description 10
- 238000000034 method Methods 0.000 description 9
- 239000013598 vector Substances 0.000 description 9
- 230000006870 function Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000009466 transformation Effects 0.000 description 2
- 230000002411 adverse Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000001131 transforming effect Effects 0.000 description 1
Images



Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/50—Reduction of harmonics
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Ac Motors In General (AREA)
Description
本発明は、周期外乱自動抑制装置に係わり、特に電流誤差補正を行いつつトルクリプル抑制も行う周期外乱自動抑制装置に関するものである。 The present invention relates to an automatic periodic disturbance suppressing device, and more particularly to an automatic periodic disturbance suppressing device that suppresses torque ripple while performing current error correction.
周期外乱の発生抑制制御としては、受変電設備での電力系統制御、ロボットによる位置決め制御、ダイナモメータシステムの軸トルク共振抑制、モータ筐体の振動抑制(電気自動車、エレベータなどの乗り心地に関連するもの)等が存在し、これら各製品での周期外乱を高精度に抑制することが要望されている。 Periodic disturbance generation suppression control includes power system control in power receiving / transforming equipment, robot positioning control, dynamometer system axial torque resonance suppression, motor housing vibration suppression (related to riding comfort of electric vehicles, elevators, etc.) Etc.), and it is desired to suppress the periodic disturbance in each of these products with high accuracy.
例えば、モータは原理的にトルクリプルを発生し、振動、騒音、乗り心地への悪影響、電気・機械共振等の種々の問題を引き起こす。特に、埋込磁石形のPMモータは、コギングトルクリプルとリラクタンストルクリプルが複合的に発生する。その対策として、トルクリプルを抑制する制御方式として周期外乱オブザーバ補償法が提案されている。 For example, a motor generates torque ripple in principle, causing various problems such as vibration, noise, adverse effects on riding comfort, and electrical / mechanical resonance. In particular, in an embedded magnet type PM motor, cogging torque ripple and reluctance torque ripple are generated in a composite manner. As a countermeasure, a periodic disturbance observer compensation method has been proposed as a control method for suppressing torque ripple.
図5は、特許文献1及び非特許文献によって公知となっている周期外乱オブザーバのn次トルクリプル周波数成分に関する制御ブロック図を示したものである。
1はトルクリプル補償値演算部で、正弦波/余弦波の制御指令rn(通常は0)と周期外乱オブザーバ3による推定値dTA^n, dTB^nとの差分にそれぞれ正弦波/余弦波値を乗算してそれを加算することでトルクリプル補償指令TC * nを生成し制御対象2に出力される。制御対象2では、周期の外乱(以下周期外乱dTnという)が発生することがある。例えば、制御対象がモータであればコギングトルクなどによる回転数に同期した外乱であるトルクリプルがこれに相当し、振動や騒音の要因となる。FIG. 5 is a control block diagram relating to the n-th order torque ripple frequency component of the periodic disturbance observer known from
周期外乱オブザーバ3は周期外乱dTnを抑制するもので、周波数成分毎に複素ベクトルで表現したシステム同定モデルを外乱オブザーバの逆システムモデルを用いることで、制御対象とする周波数の外乱を直接的に推定して補償する。
これにより比較的単純な制御構成でありながら、対象とした周波数に対しては次数に関係なく高い抑制効果が得られる。
Thereby, although it is a comparatively simple control configuration, a high suppression effect can be obtained for the target frequency regardless of the order.
システム同定モデルP^nの取得に関して、制御に先立って制御対象のプラントPn(=PAn+jPBn)に対して予めシステム同定を行い、1次元複素ベクトルの形で(1)式として表現する。
P^n=P^An+jP^Bn …(1)
ただし、添字のnはn次成分、変数は何れもXn=XAn+jXBnと表現される複素ベクトルである。Regarding the acquisition of the system identification model P ^ n , system identification is performed in advance for the plant P n (= P An + jP Bn ) to be controlled prior to the control, and is expressed as an equation (1) in the form of a one-dimensional complex vector. .
P ^ n = P ^ An + jP ^ Bn (1)
However, the subscript n is an n-order component, and all variables are complex vectors expressed as X n = X An + jX Bn .
例えば、1〜1000Hzまでのシステム同定結果を1Hz毎に複素ベクトルで表現した場合、1000個の1次元複素ベクトルの要素からなるテーブルでシステムを表現できる。または、同定結果を数式化してシステムを表現することも可能である。何れの手法も、特定の周波数成分については簡素な1次元複素ベクトルでシステムモデルの表現は可能となる。
なお、システム同定モデルに限らず文中記載のP^n,rn,dTn,dT^n,TnもXn=XAn+jXBnと表現される複素ベクトルである。For example, when the system identification result of 1 to 1000 Hz is expressed by a complex vector every 1 Hz, the system can be expressed by a table composed of 1000 one-dimensional complex vector elements. Alternatively, the system can be expressed by formulating the identification result. In any method, the system model can be expressed with a simple one-dimensional complex vector for a specific frequency component.
Incidentally, a complex vector which is expressed as a system identification model without being limited mentioned in this document P ^ n, r n, dT n, dT ^ n, T n be X n = X An + jX Bn .
具体的な制御手法としては、プラント出力に対してフーリエ変換を簡易化した低域通過フィルタGFを通すことで、周期外乱の抑制対象とする周波数成分を抽出する。これに上記のシステム同定モデルの逆数P^n -nで表現される逆システムを乗算し、GFを通した制御指令値との差分から周期外乱dTnを推定しシステム同定モデルd^nとする。推定した周期外乱dTnを制御指令値rnから差し引いて外乱補償値とし、周期外乱dTnを抑制する。以上の流れが周期外乱オブザーバによる周期外乱を抑制する制御手法である。
インバータ駆動の装置における周期外乱の発生要因は多々あるが、電流センサのオフセットおよびゲイン誤差もその一つである。オフセット誤差は主に同期周波数の1fに、ゲイン誤差は主に2fの周期外乱を発生させる。 There are many causes of periodic disturbances in an inverter-driven device, and current sensor offset and gain errors are one of them. The offset error mainly causes 1f of the synchronization frequency, and the gain error mainly generates 2f of periodic disturbance.
トルクリプルを発生させる要因はこの電流センサ誤差以外にもモータ自身のコギングトルクなどがある。この時、“トルクリプル抑制“と”電流センサ誤差補正“の2つを同時目的とする場合を考える。 Factors that generate torque ripple include the cogging torque of the motor itself in addition to the current sensor error. At this time, let us consider a case where the two purposes of “torque ripple suppression” and “current sensor error correction” are simultaneously aimed.
従来のトルク検出値を入力としたトルクリプル抑制の周期外乱オブザーバ構成では、トルクリプルは抑制可能であるが電流センサ誤差を補正することは出来ない。これは図5の制御対象からの検出値をトルク検出値として制御指令値rnをトルク指令もしくは電流指令とした場合に相当する。出願人は、電流センサ誤差補正を可能とする手法についての特許出願をしているが、この場合は逆にコギングトルクなどによってあらわれるトルクリプルは残留したままになる。単純に、電流センサ誤差補正とトルクリプル抑制を並列駆動させることも考えられるが、センサ誤差要因とモータ側要因のリプルが同次元に発生している場合では、両者の干渉が発生し振動抑制および電流が制御不能に陥る。In the conventional disturbance observer configuration for torque ripple suppression using the detected torque detection value as an input, torque ripple can be suppressed, but current sensor error cannot be corrected. This corresponds to a case where the control command value r n and a torque command or current command and a detected value from the controlled object 5 as a torque detection value. The applicant has filed a patent application regarding a technique that enables current sensor error correction. In this case, however, the torque ripple generated by the cogging torque or the like remains. It may be possible to simply drive the current sensor error correction and torque ripple suppression in parallel, but if the sensor error factor and the motor side ripple occur in the same dimension, interference between the two causes vibration suppression and current ripple. Falls out of control.
このため、電流センサ誤差補正を行いつつトルクリプル抑制も達成する制御方式が必要となる。 For this reason, a control system that achieves torque ripple suppression while performing current sensor error correction is required.
本発明が目的とするところは、電流誤差補正を行いつつトルクリプルの抑制も行う周期外乱自動抑制装置を提供することにある。
本発明は、電流指令値と、電流センサによる電流検出値から、電流制御部によって電圧指令値を生成し、電圧指令値に基づいて制御装置を介してプラントを制御するものにおいて、
プラントモデル部を設け、プラントモデル部に前記電圧指令値を入力して仮想電流値を生成し、仮想電流値は座標変換部を介して電流誤差補正制御系の周期外乱オブザーバに入力して補償値を算出し、算出された補償値を前記電流検出値に重畳して、電流センサによる電流検出値を補正すると共に、
トルクリプル抑制系の周期外乱オブザーバを設け、この周期外乱オブザーバにプラントの出力トルク及び回転角速度を入力して補償値を算出し、算出された補償値は座標変換部を介して前記電流指令値に加算するよう構成したことを特徴としたものである。An object of the present invention is to provide a periodic disturbance automatic suppression device that suppresses torque ripple while performing current error correction.
The present invention generates a voltage command value by a current control unit from a current command value and a current detection value by a current sensor, and controls a plant via a control device based on the voltage command value.
A plant model unit is provided, and the voltage command value is input to the plant model unit to generate a virtual current value. The virtual current value is input to the periodic disturbance observer of the current error correction control system via the coordinate conversion unit and compensated. And superimposing the calculated compensation value on the current detection value to correct the current detection value by the current sensor,
A periodic disturbance observer for the torque ripple suppression system is provided, and the compensation value is calculated by inputting the plant output torque and the rotational angular velocity to the periodic disturbance observer, and the calculated compensation value is added to the current command value via the coordinate converter. It is characterized by having constituted so.
また、本発明は、トルクリプル抑制系の座標変換部を経て出力される補償値と前記プラントモデル部からの仮想電流値の差分を算出して前記電流誤差補正制御系の座標変換部に入力するよう構成したことを特徴としたものである。 Further, the present invention calculates a difference between the compensation value output through the coordinate conversion unit of the torque ripple suppression system and the virtual current value from the plant model unit, and inputs the difference to the coordinate conversion unit of the current error correction control system. It is characterized by comprising.
更に本発明は、電流誤差補正制御系の周期外乱オブザーバの出力側に設けられたスイッチとメモリを有するスイッチ部と、
前記トルクリプル抑制系の周期外乱オブザーバの出力側に設けられたスイッチ部を備え、電流誤差補正制御系による電流センサ誤差補正時に、前記トルクリプル抑制系のスイッチ部をオフにし、且つ前記電流誤差補正制御系スイッチ部のスイッチをオンにして補償値をメモリに記憶し、メモリに記憶された補償値に基づいて電流センサ誤差補正を行うと共に、
電流センサ誤差補正の終了後に前記トルクリプル抑制系のスイッチ部をオンしてトルクリプルを抑制するよう構成したことを特徴としたものである。The present invention further includes a switch provided on the output side of the periodic disturbance observer of the current error correction control system and a switch unit having a memory,
A switch unit provided on the output side of the periodic disturbance observer of the torque ripple suppression system, and when the current sensor error correction by the current error correction control system, the switch unit of the torque ripple suppression system is turned off, and the current error correction control system Turn on the switch of the switch unit, store the compensation value in the memory, perform current sensor error correction based on the compensation value stored in the memory,
The torque ripple suppression system is configured to suppress torque ripple by turning on the switch portion of the torque ripple suppression system after completion of the current sensor error correction.
また、本発明は、電流指令値と、電流センサによる電流検出値から、電流制御部によって電圧指令値を生成し、電圧指令値に基づいて制御装置を介してプラントを制御するものにおいて、
前記生成された電圧指令値と前記プラントの回転角速度信号を電流誤差補正制御系の周期外乱オブザーバに入力して外乱推定値を算出すると共に、
トルクリプル抑制系の周期外乱オブザーバを設け、この周期外乱オブザーバにプラントの出力トルク及び回転角速度を入力して補償指令値を算出し、算出された補償指令値と前記電流誤差補正制御系の周期外乱オブザーバによって算出された外乱推定値の差分を補償値とし、この補償値と前記電流検出値との差分を補償値として前記電流指令値に加算するよう構成したことを特徴としたものである。Further, the present invention generates a voltage command value by a current control unit from a current command value and a current detection value by a current sensor, and controls a plant via a control device based on the voltage command value.
The generated voltage command value and the rotational angular velocity signal of the plant are input to a periodic disturbance observer of a current error correction control system to calculate a disturbance estimated value,
A periodic disturbance observer for a torque ripple suppression system is provided, and a compensation command value is calculated by inputting a plant output torque and a rotational angular velocity to the periodic disturbance observer, and the calculated compensation command value and a periodic disturbance observer for the current error correction control system are calculated. The difference between the estimated disturbance values calculated by the above is used as a compensation value, and the difference between the compensation value and the detected current value is added to the current command value as a compensation value.
本発明では、電流センサ誤差による周期外乱の抑制と共に、トルクリプルの抑制も行うもので、以下図に基づいて説明する。なお、電流センサによる振動発生はインバータとモータの組み合わせに限らず、電流センサを用いた制御機器一般に当てはまる問題である。よって、以下で示す各実施形態では、制御装置をインバータとし、制御対象をモータの例としているが、一般的な制御機器に対して適用可能なものである。 In the present invention, torque ripple is also suppressed along with suppression of periodic disturbance due to current sensor error, which will be described below with reference to the drawings. It should be noted that generation of vibration by the current sensor is not limited to the combination of the inverter and the motor, and is a problem that applies to general control equipment using the current sensor. Therefore, in each embodiment shown below, the control device is an inverter and the controlled object is an example of a motor. However, the present invention is applicable to general control equipment.
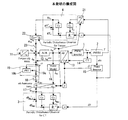
図1は、本発明の第1の実施形態を示す構成図を示したものである。なお、図における各記号は次の通りである。
[共通変数]
T*:トルク指令値、idq *:id,iq指令値、vdq ref:vd,vq指令値、iuvw:相電流値、T:出力トルク値、θ:回転角、ω:回転角速度、idq sense:電流検出id,iq値[電流センサ補正側変数]
idq´:補償後id,iq、icdq CT:id,iq補償値、i^ dq:仮想id,iq値、Idqn:n次高調波id,iq値、icdqn:n次id,iq補償値、dIdq * n:n次id,iq補償指令値、dIdqn:n次id,iq外乱推定値
[トルク補正側変数]
icdq trq:補償id,iq値、Tn:n次高調波id,iq値、Tcn:n次id,iq補償値、dT* n:n次トルク補償指令値、dTn:n次トルク外乱推定値、
図1において、1は制御装置となるインバータ、2は制御対象となるプラント(ここではPMモータ)、3,4は周期外乱オブザーバで、周期外乱オブザーバ3は電流誤差補正制御系となり、周期外乱オブザーバ4はトルクリプル抑制系となる。FIG. 1 is a block diagram showing a first embodiment of the present invention. The symbols in the figure are as follows.
[Common variables]
T * : torque command value, i dq * : i d , i q command value, v dq ref : v d , v q command value, i uvw : phase current value, T: output torque value, θ: rotation angle, ω : Rotational angular velocity, i dq sense : current detection i d , i q value [current sensor correction side variable]
i dq ′: post-compensation i d , i q , ic dq CT : i d , i q compensation value, i ^ dq : virtual i d , i q value, I dqn : n-order harmonics i d , i q value, ic dqn : n-order i d , i q compensation value, dI dq * n : n-order i d , i q compensation command value, dI dqn : n-order i d , i q disturbance estimated value [torque correction side variable]
ic dq trq : compensation i d , i q value, T n : n-order harmonics i d , i q value, Tc n : n-order i d , i q compensation value, dT * n : n-order torque compensation command value dT n : n-th order torque disturbance estimated value,
In FIG. 1,
11は変換部で、トルク指令値T*をd,q軸の電流指令値idq *(id,iq)に変換する。変換された電流指令値idq *は加減算部においてidq´と減算、またはicdq trqと加算演算が行われて電流制御部12に入力される。電流制御部12は、idq *とidq´との差分、またはidq *とicdq trqとの加算値に基づいて電圧指令値vdq refを算出する。13は変換部で、d,q軸の2相電圧を3相に変換してインバータ1に出力すると共に、電流センサ14により検出された3相電流を2相に変換し、id,iqの電流検出値idq sens eとして減算部に出力されてid,iqの補償値icdq CTとの差分idq´が算出される。11 converts the conversion unit, the torque command value T * d, the current command value of q-axis i dq * (i d, i q) to. The converted current command value i dq * is subtracted with i dq ′ or added with ic dq trq in the adder / subtractor and input to the
15は回転位置センサで、エンコーダ波形abzからのロータ回転角度θと回転角速度ωを検出して変換部13に出力すると共に、係数n倍して座標変換部17及びトルクリプル抑制系の変換部21と座標変換部22にそれぞれ出力される。
また、角速度ωは係数n倍した後、周期外乱オブザーバ3と4に入力される。
16はプラントモデル部(ここではモータモデル部)で電流制御部12の出力であるvdq ref指令を入力してモータの回路方程式により仮想電流値i^dqを算出し、後述のトルク補償値icdq trqとの差分を振動抑制対象として座標変換部17を介して周期外乱オブザーバ3に出力する。これにより、電流センサ誤差補正を行いなから、同時にトルクリプルの抑制を達成する。
なお、周期外乱オブザーバ3,4におけるGFはローパスフィルタである。 A
Further, the angular velocity ω is input to the
Note that G in the
電流センサに誤差が生じている場合、電流制御部12の応答範囲内においては検出したidq sense上の振動を電流制御部12が抑制する。振動分はvdq ref指令に重畳され、これにより出力電流が振動することで周期外乱となって現れる。このためインバータ内部においてidq senseに振動は観測されない。しかし、vdq ref指令をモータモデル部16の回路方程式を通すことで振動状態の仮想電流値i^dqの観測が可能となる。モータモデル部16における回路方程式は、対象がPMモータである場合は(2)式を用いる。When an error occurs in the current sensor, the

ここで、R:電気子抵抗、Ld:d軸インダクタンス、Lq:q軸インダクタンス、Φ:磁束鎖交数である。Here, R is an electric resistance, L d is a d-axis inductance, L q is a q-axis inductance, and Φ is a flux linkage number.
モータモデル部16における回路方程式に用いるパラメータ精度については、高精度なものは必要ではなく周期外乱オブザーバ3のロバスト性範囲内であれば良い。このため設計値などを適用し、周期外乱オブザーバ3の内部のシステムモデルもこれに従い予め計算可能であり、実測などによる正確な取得は必ずしも必要ではない。 The parameter accuracy used in the circuit equation in the
次に仮想電流値i^dqの対象周波数成分抽出のために座標変換部17では(3)式の高調波dq変換を行う。Next, in order to extract the target frequency component of the virtual current value i ^ dq , the coordinate
電流id,iqが常に直交することを利用し、周期外乱オブザーバ3で抑制対象とする複素数形式の周波数成分にはidn,iqnをそれぞれ実部、虚部に設定し、
idqn=idn+jiqnとして扱う。ここからは通常の周期外乱オブザーバ3の制御則に従い補償値を算出する。
最後に座標変換部17では、補償値を(4)式の座標系逆変換によりdq座標系に変換する。Using the fact that the currents i d and i q are always orthogonal, i dn and i qn are set to the real part and the imaginary part, respectively, for the complex frequency components to be suppressed by the
Treat as i dqn = i dn + ji qn . From here, the compensation value is calculated according to the control law of the normal
Finally, the coordinate
これにより得られるn次の高調波電流補償値icdqnはベクトルの加算部18で加算されて補償値icdq CTとなり、このicdq CTを電流検出値idq senseに逆極性に重畳して補償値idq´とし、更にidq *との差分を得て電流制御部12に入力する。
したがって、周期外乱オブザーバ3は電流誤差補正制御系となり、電流センサ誤差による周期外乱を低減することで電流検出値を直接補償することが可能となる。The nth-order harmonic current compensation value ic dqn obtained as a result is added by the
Therefore, the
次に、トルクリプル抑制系について説明する。
PMモータ2の出力トルク値Tは変換部21に入力される。変換部21には、回転位置センサ15により検出されたロータ回転角度θが係数n倍されて入力されており、トルク値Tはこのθに対応してabの2相信号に変換され、周期外乱オブザーバ4に入力される。Next, the torque ripple suppression system will be described.
The output torque value T of the
周期外乱オブザーバ4には係数n倍された角速度ωも入力されて図5と同様な演算が行われて補償値Tcnを算出し、座標変換部22に出力される。座標変換部22で、d,q軸の座標に変換された補償値icdq trqは電流指令値idq *に加算されて電流制御部12に入力されると共に、補償値icdq trqはモータモデル部16の出力i^ dqと逆極性に重畳されて座標変換部17に入力される。The periodic disturbance observer 4 also input coefficients n times the angular velocity ω is carried out similar operations as in FIG. 5 calculates a compensation value Tc n, is output to the coordinate
したがって、この実施形態によれば、電流センサ誤差による周期外乱の補正が可能となると共に、トルクリプルの抑制も可能となるものである。 Therefore, according to this embodiment, it is possible to correct the periodic disturbance due to the current sensor error and to suppress the torque ripple.
図2は第2の実施形態を示すブロック構成図で、図1で示す第1の実施形態と異なる部分は、スイッチ部19,23を設けたことである。
図1で示す第1の実施形態の場合、モータモデル部16に誤差があると補償値の干渉誤差となる。その場合でも電流誤差補正とトルクリプル抑制を達成することはできるが、補償値icdqnに現れて電流センサ誤差補正値とセンサ誤差の真値にずれが生じる。このため一旦取得した補償値icdqnから電流センサ誤差を推定し、フィードフォワードで電流センサ誤差補正を行うことで補正誤差が生じる。FIG. 2 is a block diagram showing the second embodiment. The difference from the first embodiment shown in FIG. 1 is that
In the case of the first embodiment shown in FIG. 1, if there is an error in the
そこで、図2ではモータモデル部16の出力i^ dqからトルクリプル抑制系の補償値icdq trqを差引くのを止めてスイッチ部19,23によって制御系の動作を切り替える手法を採ったものである。なお、スイッチ部19には、スイッチ19aとメモリ19bを備えている。Therefore, in FIG. 2, a method of stopping the subtraction of the compensation value ic dq trq of the torque ripple suppression system from the output i ^ dq of the
抑制制御の手順は以下とする。
(1)スイッチ部19のスイッチ19aをオンにし、スイッチ部23をオフ状態にして電流誤差補正制御系のみを動作させて電流センサ誤差補正を行い、メモリ19bに補償値icdq CTを記憶させる。
(2)電流センサ誤差補正が十分に完了した時点でスイッチ19aをメモリ側の端子に切替え、以下の補償値icdq CTは、メモリ19bに記憶された補償値を用いて電流センサ誤差補正を行う。この時点ではトルクリプルはまだ十分に抑制されない。
(3)次に、電流センサ誤差補正が十分完了した時点でスイッチ部23をオン状態にし、残留しているトルクリプルの抑制制御を行う。The procedure of suppression control is as follows.
(1) The
(2) When the current sensor error correction is sufficiently completed, the
(3) Next, when the current sensor error correction is sufficiently completed, the
これにより、制御応答が犠牲になるため、可変速運転中などでは適用不可であるが、固定動作点ではモータモデル部16の精度に関係なく、電流センサ誤差補正icdqn値を精度よく取得することが可能となる。As a result, the control response is sacrificed and cannot be applied during variable speed operation or the like, but the current sensor error correction ic dqn value can be accurately obtained at a fixed operating point regardless of the accuracy of the
図3は第3の実施形態を示すブロック構成図で、図1で示す第1の実施形態と異なる部分は、トルクリプル抑制系の補償値icdq trqとモータモデル部16の出力i^ dqとの差演算がないことである。FIG. 3 is a block diagram showing the third embodiment. The difference from the first embodiment shown in FIG. 1 is the difference between the compensation value ic dq trq of the torque ripple suppression system and the output i ^ dq of the
実施形態1,2では、同次数の抑制を想定して電流誤差補正制御系とトルクリプル抑制系との干渉を防ぐことを目的として構成されているが、異次数の同時抑制であれば両者の干渉を考慮する必要が無い。このため図3に示す単純な結合で同時抑制を達成することができる。 In the first and second embodiments, it is configured to prevent interference between the current error correction control system and the torque ripple suppression system assuming suppression of the same order. There is no need to consider. Therefore, simultaneous suppression can be achieved with the simple coupling shown in FIG.
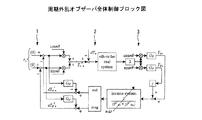
図4は第4の実施形態を示すブロック構成図で、図1で示す第1の実施形態と異なる部分は、モータモデル部16と座標変換部22を省いたものである。すなわち、周期外乱オブザーバ4の出力Tcnを補償指令値dIdq * nとして周期外乱オブザーバ3に入力し、周期外乱オブザーバ3で算出された外乱推定値dIdqnとの差分が得られる。この差分が補償値Icdqnとして座標変換部17に入力される。FIG. 4 is a block diagram showing the fourth embodiment. The difference from the first embodiment shown in FIG. 1 is that the
また、モータモデル部16を省くことで、周期外乱オブザーバ3には予めモータモデル部16に用いていた回路方程式によるパラメータ変更機能を持たせる。例えば、周期外乱オブザーバ3におけるシステム同定モデルP^nの取得時に、周波数毎にテーブルなどによるモデルを可変する機能をもたせている。Further, by omitting the
この実施形態では、全体の制御基本構成は図1と同様としながら電流センサ誤差補正側の振動抑制対象をvdq ref指令とし、センサ誤差由来で電圧指令値vdq refに発生しているリプルを抑制しながらモータ由来のトルクリプルも抑制して補償指令としてセンサ誤差補正に入力している。これによって、モータ由来とセンサ誤差由来の同次数に発生するリプルを互いに非干渉で抑制することが可能となる。In this embodiment, the overall control basic configuration is the same as in FIG. 1, and the vibration suppression target on the current sensor error correction side is the v dq ref command, and the ripple generated in the voltage command value v dq ref is derived from the sensor error. While suppressing, the torque ripple derived from the motor is also suppressed and input to the sensor error correction as a compensation command. This makes it possible to suppress ripples generated in the same order derived from the motor and the sensor error without causing interference.
したがって、この実施形態によれば、トルクリプルも抑制しながら電流検出値を正確に補正することができる。 Therefore, according to this embodiment, the current detection value can be accurately corrected while suppressing torque ripple.
Claims (4)
プラントモデル部を設け、プラントモデル部に前記電圧指令値を入力して仮想電流値を生成し、仮想電流値は座標変換部を介して電流誤差補正制御系の周期外乱オブザーバに入力して補償値を算出し、算出された補償値を前記電流検出値に重畳して、電流センサによる電流検出値を補正すると共に、
トルクリプル抑制系の周期外乱オブザーバを設け、この周期外乱オブザーバにプラントの出力トルク及び回転角速度を入力して補償値を算出し、算出された補償値は座標変換部を介して前記電流指令値に加算するよう構成したことを特徴とした周期外乱自動抑制装置。From the current command value and the current detection value by the current sensor, a voltage command value is generated by the current control unit, and the plant is controlled via the control device based on the voltage command value.
A plant model unit is provided, and the voltage command value is input to the plant model unit to generate a virtual current value. The virtual current value is input to the periodic disturbance observer of the current error correction control system via the coordinate conversion unit and compensated. And superimposing the calculated compensation value on the current detection value to correct the current detection value by the current sensor,
A periodic disturbance observer for the torque ripple suppression system is provided, and the compensation value is calculated by inputting the plant output torque and the rotational angular velocity to the periodic disturbance observer, and the calculated compensation value is added to the current command value via the coordinate converter. An apparatus for automatically suppressing periodic disturbances configured to perform
前記トルクリプル抑制系の周期外乱オブザーバの出力側に設けられたスイッチ部を備え、
電流誤差補正制御系による電流センサ誤差補正時に、前記トルクリプル抑制系のスイッチ部をオフにし、且つ前記電流誤差補正制御系スイッチ部のスイッチをオンにして補償値をメモリに記憶し、メモリに記憶された補償値に基づいて電流センサ誤差補正を行うと共に、
電流センサ誤差補正の終了後に前記トルクリプル抑制系のスイッチ部をオンしてトルクリプルを抑制するよう構成したことを特徴とした請求項1に記載の周期外乱自動抑制装置。A switch provided on the output side of the periodic disturbance observer of the current error correction control system and a switch unit having a memory;
A switch portion provided on the output side of the periodic disturbance observer of the torque ripple suppression system;
At the time of current sensor error correction by the current error correction control system, the switch part of the torque ripple suppression system is turned off, and the switch of the current error correction control system switch part is turned on, and the compensation value is stored in the memory and stored in the memory. Current sensor error correction based on the compensation value,
2. The periodic disturbance automatic suppression device according to claim 1, wherein after the current sensor error correction is completed, the torque ripple suppression system is turned on to suppress the torque ripple.
前記生成された電圧指令値と前記プラントの回転角速度を電流誤差補正制御系の周期外乱オブザーバに入力して外乱推定値を算出すると共に、
トルクリプル抑制系の周期外乱オブザーバを設け、この周期外乱オブザーバにプラントの出力トルク及び回転角速度を入力して補償指令値を算出し、算出された補償指令値と前記電流誤差補正制御系の周期外乱オブザーバによって算出された外乱推定値の差分を補償値とし、この補償値と前記電流検出値との差分を前記電流指令値に加算するよう構成したことを特徴とした周期外乱自動抑制装置。From the current command value and the current detection value by the current sensor, a voltage command value is generated by the current control unit, and the plant is controlled via the control device based on the voltage command value.
While inputting the generated voltage command value and the rotational angular velocity of the plant into a periodic disturbance observer of a current error correction control system to calculate a disturbance estimated value,
A periodic disturbance observer for a torque ripple suppression system is provided, and a compensation command value is calculated by inputting a plant output torque and a rotational angular velocity to the periodic disturbance observer, and the calculated compensation command value and a periodic disturbance observer for the current error correction control system are calculated. A periodic disturbance automatic suppression device configured to add the difference between the estimated disturbance value calculated by the above equation as a compensation value and add the difference between the compensation value and the detected current value to the current command value.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014117181 | 2014-06-06 | ||
| JP2014117181 | 2014-06-06 | ||
| PCT/JP2015/058087 WO2015186406A1 (en) | 2014-06-06 | 2015-03-18 | Periodic disturbance automatic suppression device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2015186406A1 JPWO2015186406A1 (en) | 2017-04-20 |
| JP6183554B2 true JP6183554B2 (en) | 2017-08-23 |
Family
ID=54766487
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016525718A Active JP6183554B2 (en) | 2014-06-06 | 2015-03-18 | Periodic disturbance automatic suppression device |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6183554B2 (en) |
| WO (1) | WO2015186406A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108964563A (en) * | 2018-09-04 | 2018-12-07 | 南京工业大学 | Induction motor direct torque control method based on non-smooth control technology |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6841643B2 (en) * | 2016-12-09 | 2021-03-10 | Juki株式会社 | Motor control device, sewing machine and electronic component mounting device |
| CN106953570B (en) * | 2017-04-25 | 2018-02-02 | 南京福致通电气自动化有限公司 | Energy feedback type elevator traction drive system control method based on matrix converter |
| CN113054877B (en) * | 2021-01-12 | 2023-09-29 | 北京控制工程研究所 | Permanent magnet motor harmonic disturbance torque suppression system based on characteristic frequency observer |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06121572A (en) * | 1992-10-01 | 1994-04-28 | Matsushita Electric Ind Co Ltd | Automatic offset regulator for current detector |
| JP3329184B2 (en) * | 1996-05-27 | 2002-09-30 | 神鋼電機株式会社 | Load state estimation device |
| WO2010024195A1 (en) * | 2008-08-26 | 2010-03-04 | 株式会社明電舎 | Electric motor disturbance suppression device and disturbance suppression method |
| JP5780058B2 (en) * | 2011-08-29 | 2015-09-16 | 株式会社明電舎 | Periodic disturbance suppressor |
| JP5929863B2 (en) * | 2013-09-30 | 2016-06-08 | 株式会社明電舎 | Control device |
-
2015
- 2015-03-18 JP JP2016525718A patent/JP6183554B2/en active Active
- 2015-03-18 WO PCT/JP2015/058087 patent/WO2015186406A1/en active Application Filing
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108964563A (en) * | 2018-09-04 | 2018-12-07 | 南京工业大学 | Induction motor direct torque control method based on non-smooth control technology |
| CN108964563B (en) * | 2018-09-04 | 2022-03-08 | 南京工业大学 | Induction motor direct torque control method based on non-smooth control technology |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2015186406A1 (en) | 2015-12-10 |
| JPWO2015186406A1 (en) | 2017-04-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5929863B2 (en) | Control device | |
| JP5637042B2 (en) | Electric motor pulsation suppressing device and electric motor pulsation suppressing method | |
| EP2779415A2 (en) | Motor control system to compensate for torque ripple | |
| JP6617500B2 (en) | Electric power steering control method, electric power steering control device, electric power steering device and vehicle | |
| JP4631672B2 (en) | Magnetic pole position estimation method, motor speed estimation method, and motor control apparatus | |
| JP5800108B2 (en) | Periodic disturbance automatic suppression device | |
| JP5447810B2 (en) | Motor drive device and torque ripple removal method | |
| JP6017038B2 (en) | Motor control device | |
| WO2015019495A1 (en) | Motor drive system and motor control device | |
| JP6183554B2 (en) | Periodic disturbance automatic suppression device | |
| JP5936770B2 (en) | Rotating machine control device | |
| JP6519149B2 (en) | Motor controller | |
| JP2010035352A (en) | Device for estimating rotor position of synchronous electric motor | |
| JP5163049B2 (en) | AC motor control device and AC motor control method | |
| JP6398462B2 (en) | Torque ripple suppression device without position and torque sensor | |
| JP6504795B2 (en) | Torque ripple suppression device and torque ripple suppression method | |
| JP6766398B2 (en) | Magnet temperature estimation method and magnet temperature estimation device | |
| JP5444983B2 (en) | Rotating machine control device | |
| JP2015027136A (en) | Inverter controller | |
| JP2007143276A (en) | Rotor angle estimating method and controller of dc brushless motor | |
| JP2014158336A (en) | Motor controller | |
| JP2017175878A (en) | Method and apparatus for estimating magnet temperature | |
| JP5312195B2 (en) | DC brushless motor control device | |
| JP6459710B2 (en) | Method and apparatus for estimating q-axis inductance | |
| JP2016019341A (en) | Control device for three-phase ac rotary machine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170627 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170710 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6183554 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |