JP6095065B2 - ダンプトラック - Google Patents
ダンプトラック Download PDFInfo
- Publication number
- JP6095065B2 JP6095065B2 JP2013190676A JP2013190676A JP6095065B2 JP 6095065 B2 JP6095065 B2 JP 6095065B2 JP 2013190676 A JP2013190676 A JP 2013190676A JP 2013190676 A JP2013190676 A JP 2013190676A JP 6095065 B2 JP6095065 B2 JP 6095065B2
- Authority
- JP
- Japan
- Prior art keywords
- dump truck
- reference point
- points
- calculated
- point
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C9/00—Measuring inclination, e.g. by clinometers, by levels
- G01C9/02—Details
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60P—VEHICLES ADAPTED FOR LOAD TRANSPORTATION OR TO TRANSPORT, TO CARRY, OR TO COMPRISE SPECIAL LOADS OR OBJECTS
- B60P1/00—Vehicles predominantly for transporting loads and modified to facilitate loading, consolidating the load, or unloading
- B60P1/04—Vehicles predominantly for transporting loads and modified to facilitate loading, consolidating the load, or unloading with a tipping movement of load-transporting element
- B60P1/045—Levelling or stabilising systems for tippers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60P—VEHICLES ADAPTED FOR LOAD TRANSPORTATION OR TO TRANSPORT, TO CARRY, OR TO COMPRISE SPECIAL LOADS OR OBJECTS
- B60P1/00—Vehicles predominantly for transporting loads and modified to facilitate loading, consolidating the load, or unloading
- B60P1/04—Vehicles predominantly for transporting loads and modified to facilitate loading, consolidating the load, or unloading with a tipping movement of load-transporting element
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C15/00—Surveying instruments or accessories not provided for in groups G01C1/00 - G01C13/00
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C5/00—Measuring height; Measuring distances transverse to line of sight; Levelling between separated points; Surveyors' levels
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/53—Determining attitude
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/01—Determining conditions which influence positioning, e.g. radio environment, state of motion or energy consumption
- G01S5/017—Detecting state or type of motion
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Computer Networks & Wireless Communication (AREA)
- Navigation (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
第1の実施の形態では、ダンプトラックの走行路を示す地図データとともに記憶装置(トポロジカル地図データベース)106に記憶された道路の勾配情報を参照しながら、ダンプトラックの姿勢を求める。なお、便宜上、本実施の形態でダンプトラックが走行する路面は縦断勾配を有するが、横断勾配を有しない(カント角がゼロ)とする。

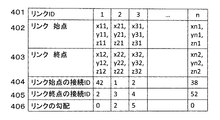
本発明の第2の実施の形態は、GPS受信機101,102を介して得られる点P,Qの位置の時系列情報を記憶装置106に保存しておき、当該時系列情報に基づいて位置データの移動ベクトルを算出し、当該移動ベクトルに基づいてダンプトラックが走行する道路の勾配αを算出する点に特徴がある。本実施の形態と第1の実施の形態は、記憶装置106のデータ構造と、コンピュータ110によって勾配αが演算される点に相違点があるが、他の構成は姿勢算出処理も含めて第1の実施の形態と同じなので説明は省略する。
Claims (2)
- フレームに回転可能に取り付けられた複数の後輪と、
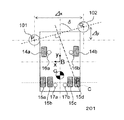
車両前後方向に互いにずらして配置された2つの位置推定装置とを備え、
ダンプトラックに設定した車両座標系において前記複数の後輪が地面と接触している部分から任意に選択した点を基準点としたとき、
前記2つの位置推定装置は、当該2つの位置推定装置によって位置が算出される2点を結ぶ線分から前記基準点に対して垂線が下ろせるように配置されているダンプトラックにおいて、
前記基準点が設定された後輪の位置における車高変化を検出するセンサと、
前記ダンプトラックが走行する道路の勾配情報が記憶された記憶装置と、
前記ダンプトラックが前記基準点を中心に回転して姿勢が変化すると仮定し、前記2つの位置推定装置によって算出される前記2点の位置から前記基準点の位置を算出し、前記2つの位置推定装置によって位置が算出される前記2点のうち少なくとも一方から地面までの距離を前記センサの検出値に基づいて算出し、前記2点のうち少なくとも一方から地面までの距離と、前記勾配情報と、前記2点および前記基準点の位置とに基づいて前記ダンプトラックの姿勢を算出する演算装置と
を備えることを特徴とするダンプトラック。 - フレームに回転可能に取り付けられた複数の後輪と、
車両前後方向に互いにずらして配置された2つの位置推定装置とを備え、
ダンプトラックに設定した車両座標系において前記複数の後輪が地面と接触している部分から任意に選択した点を基準点としたとき、
前記2つの位置推定装置は、当該2つの位置推定装置によって位置が算出される2点を結ぶ線分から前記基準点に対して垂線が下ろせるように配置されているダンプトラックにおいて、
前記基準点が設定された後輪の位置における車高変化を検出するセンサと、
前記ダンプトラックが前記基準点を中心に回転して姿勢が変化すると仮定し、前記2つの位置推定装置によって算出される前記2点の位置から前記基準点の位置を算出し、前記2つの位置推定装置によって位置が算出される前記2点のうち少なくとも一方から地面までの距離を前記センサの検出値に基づいて算出し、前記ダンプトラックの走行地点における勾配を前記ダンプトラックの過去の位置データに基づいて算出し、その算出した勾配情報と、前記2点のうち少なくとも一方から地面までの距離と、前記2点および前記基準点の位置とに基づいて前記ダンプトラックの姿勢を算出する演算装置と
を備えることを特徴とするダンプトラック。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013190676A JP6095065B2 (ja) | 2013-09-13 | 2013-09-13 | ダンプトラック |
| CN201480010452.6A CN105074382B (zh) | 2013-09-13 | 2014-07-09 | 自卸卡车 |
| US14/772,909 US9605959B2 (en) | 2013-09-13 | 2014-07-09 | Dump truck |
| PCT/JP2014/068284 WO2015037319A1 (ja) | 2013-09-13 | 2014-07-09 | ダンプトラック |
| EP14843761.9A EP3045862B1 (en) | 2013-09-13 | 2014-07-09 | Dump truck |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013190676A JP6095065B2 (ja) | 2013-09-13 | 2013-09-13 | ダンプトラック |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015055603A JP2015055603A (ja) | 2015-03-23 |
| JP2015055603A5 JP2015055603A5 (ja) | 2016-03-10 |
| JP6095065B2 true JP6095065B2 (ja) | 2017-03-15 |
Family
ID=52665442
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013190676A Active JP6095065B2 (ja) | 2013-09-13 | 2013-09-13 | ダンプトラック |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9605959B2 (ja) |
| EP (1) | EP3045862B1 (ja) |
| JP (1) | JP6095065B2 (ja) |
| CN (1) | CN105074382B (ja) |
| WO (1) | WO2015037319A1 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6473684B2 (ja) * | 2015-11-11 | 2019-02-20 | 日立建機株式会社 | 車輪の滑り角推定装置及びその方法 |
| US9952115B2 (en) | 2016-02-01 | 2018-04-24 | Caterpillar Inc. | Angle of repose detector for hauling machines |
| EP3458199A4 (en) * | 2016-05-18 | 2019-12-11 | Graco Minnesota Inc. | SYSTEM FOR DISTRIBUTING MULTIPLE COMPONENTS WITH MULTIPLE DISTRIBUTORS |
| JP6752168B2 (ja) * | 2017-02-27 | 2020-09-09 | 日立建機株式会社 | ダンプトラック及び後退支援装置 |
| FI3415390T3 (fi) | 2017-06-12 | 2024-05-30 | Hexagon Geosystems Services Ag | Ajoavustinjärjestelmä kaivoskuljetusajoneuvon peruuttamista varten |
| CN110546675B (zh) * | 2017-07-18 | 2024-06-21 | 株式会社小松制作所 | 参数确定装置、模拟装置及参数确定方法 |
| DE102019129205A1 (de) * | 2019-10-29 | 2021-04-29 | Horsch Leeb Application Systems Gmbh | Landmaschine mit System zur Berechnung eines Geländerelief und Verfahren zum Betreiben einer Landmaschine |
| EP4071738A4 (en) * | 2019-12-02 | 2024-01-03 | Pioneer Corporation | INFORMATION PROCESSING DEVICE, CONTROL METHOD, PROGRAM AND STORAGE MEDIUM |
| WO2022239306A1 (ja) | 2021-05-14 | 2022-11-17 | 株式会社Ihi | 車両積載異常検出方法及び装置 |
| JP7506238B1 (ja) | 2023-09-22 | 2024-06-25 | Kddi株式会社 | 情報処理装置、情報処理方法及びプログラム |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07244150A (ja) * | 1994-02-28 | 1995-09-19 | Fujita Corp | 重機の姿勢計測装置 |
| US6191733B1 (en) * | 1999-06-01 | 2001-02-20 | Modular Mining Systems, Inc. | Two-antenna positioning system for surface-mine equipment |
| JP2002286829A (ja) * | 2001-03-27 | 2002-10-03 | Mitsubishi Motors Corp | 絶対位置推定装置 |
| US6671587B2 (en) * | 2002-02-05 | 2003-12-30 | Ford Motor Company | Vehicle dynamics measuring apparatus and method using multiple GPS antennas |
| US7400956B1 (en) * | 2003-03-20 | 2008-07-15 | Hemisphere Gps Inc. | Satellite position and heading sensor for vehicle steering control |
| US7139651B2 (en) * | 2004-03-05 | 2006-11-21 | Modular Mining Systems, Inc. | Multi-source positioning system for work machines |
| JP5084303B2 (ja) * | 2007-03-05 | 2012-11-28 | 日本無線株式会社 | 移動体姿勢計測装置 |
| JP5430172B2 (ja) | 2009-02-20 | 2014-02-26 | 三菱電機株式会社 | 方位算出装置、方位算出装置の方位算出方法および方位算出プログラム |
| DE102009046389B4 (de) * | 2009-11-04 | 2024-09-19 | Robert Bosch Gmbh | Verfahren zur Bestimmung einer Fahrzeugzustands- oder Kenngröße in einem Fahrzeug |
| JP2012233353A (ja) | 2011-05-02 | 2012-11-29 | Komatsu Ltd | 油圧ショベルの較正システム及び油圧ショベルの較正方法 |
-
2013
- 2013-09-13 JP JP2013190676A patent/JP6095065B2/ja active Active
-
2014
- 2014-07-09 CN CN201480010452.6A patent/CN105074382B/zh active Active
- 2014-07-09 EP EP14843761.9A patent/EP3045862B1/en active Active
- 2014-07-09 US US14/772,909 patent/US9605959B2/en active Active
- 2014-07-09 WO PCT/JP2014/068284 patent/WO2015037319A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| WO2015037319A1 (ja) | 2015-03-19 |
| EP3045862B1 (en) | 2020-03-18 |
| CN105074382A (zh) | 2015-11-18 |
| US9605959B2 (en) | 2017-03-28 |
| CN105074382B (zh) | 2017-08-04 |
| EP3045862A1 (en) | 2016-07-20 |
| JP2015055603A (ja) | 2015-03-23 |
| EP3045862A4 (en) | 2017-07-12 |
| US20160010988A1 (en) | 2016-01-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6095065B2 (ja) | ダンプトラック | |
| EP2841874B1 (en) | Estimation of the relative attitude and position between a vehicle body and an implement operably coupled to the vehicle body | |
| US9026263B2 (en) | Automotive navigation system and method to utilize internal geometry of sensor position with respect to rear wheel axis | |
| US9885575B2 (en) | Vehicle positioning | |
| CN109186597B (zh) | 一种基于双mems-imu的室内轮式机器人的定位方法 | |
| AU2015200793B2 (en) | Compensating for acceleration induced inclination errors | |
| AU2015305864B2 (en) | Earthmoving machine comprising weighted state estimator | |
| US9580104B2 (en) | Terrain-based machine comprising implement state estimator | |
| US20190242687A1 (en) | Relative angle estimation using inertial measurement units | |
| JP2020530077A (ja) | 単一の位置センサを用いる回転プラットフォームのヨーおよび回転中心の決定方法 | |
| CN106646569A (zh) | 一种导航定位方法及设备 | |
| JP2009198279A (ja) | 車載ナビゲーションシステム及びナビゲーション方法 | |
| US9052391B2 (en) | Backup velocity estimation utilizing traction device speed | |
| JP2023533065A (ja) | 拘束運動を用いた絶対的ヘディング推定 | |
| JP7228629B2 (ja) | 演算装置 | |
| CN111002991B (zh) | 一种车载导航信息处理的方法、装置及计算机存储介质 | |
| JP5684039B2 (ja) | 存在確率分布推定装置及びプログラム | |
| CN118348541A (zh) | 水下机器人定位方法、装置、电子设备及存储介质 | |
| CN116533287A (zh) | 一种机器人抖动测试方法、系统、设备和存储介质 | |
| JP2024063671A (ja) | 車いす動作推定装置、車いす動作推定システム、車いす動作推定方法、及び車いす動作推定プログラム | |
| JP2023012798A (ja) | 作業機械 | |
| CN113900126A (zh) | 双天线位置确定方法及装置 | |
| Brown et al. | Road bank estimation on uneven terrain for unmanned ground vehicles | |
| JP2019064469A (ja) | モーターサイクル、その姿勢推定装置及び運転状態復元装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160119 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160119 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20160119 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161206 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170120 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170207 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170208 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6095065 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |