JP6090438B2 - グルーピング装置、グルーピング方法、およびグルーピングプログラム - Google Patents
グルーピング装置、グルーピング方法、およびグルーピングプログラム Download PDFInfo
- Publication number
- JP6090438B2 JP6090438B2 JP2015516785A JP2015516785A JP6090438B2 JP 6090438 B2 JP6090438 B2 JP 6090438B2 JP 2015516785 A JP2015516785 A JP 2015516785A JP 2015516785 A JP2015516785 A JP 2015516785A JP 6090438 B2 JP6090438 B2 JP 6090438B2
- Authority
- JP
- Japan
- Prior art keywords
- information
- grouping
- objects
- relevance
- similarity
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images
























Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/20—Information retrieval; Database structures therefor; File system structures therefor of structured data, e.g. relational data
- G06F16/28—Databases characterised by their database models, e.g. relational or object models
- G06F16/284—Relational databases
- G06F16/285—Clustering or classification
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/023—Services making use of location information using mutual or relative location information between multiple location based services [LBS] targets or of distance thresholds
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/20—Information retrieval; Database structures therefor; File system structures therefor of structured data, e.g. relational data
- G06F16/24—Querying
- G06F16/245—Query processing
- G06F16/2455—Query execution
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/025—Services making use of location information using location based information parameters
- H04W4/027—Services making use of location information using location based information parameters using movement velocity, acceleration information
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/029—Location-based management or tracking services
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/06—Selective distribution of broadcast services, e.g. multimedia broadcast multicast service [MBMS]; Services to user groups; One-way selective calling services
- H04W4/08—User group management
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Databases & Information Systems (AREA)
- Theoretical Computer Science (AREA)
- Data Mining & Analysis (AREA)
- Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Computational Linguistics (AREA)
- Multimedia (AREA)
- Information Retrieval, Db Structures And Fs Structures Therefor (AREA)
Description
本発明は、グルーピング装置、グルーピング方法、およびグルーピングプログラムに関する。
位置情報が付与された情報のグルーピング(グループ化)が必要な場合がある。ここで、「位置情報が付与された情報」の例は、ある位置に配置された広告看板に表示される広告、無線LAN環境下でのパーソナルコンピュータ(PC)やPCの周辺機器の機種など動作させるために必要な情報などであり得る。これらの情報の「グルーピング」とは、異なる位置情報が付与された複数の情報を一つのグループにまとめることを指す。
たとえば連続する何種類かのデザインの広告で、各デザインについて複数枚の広告看板を作る場合を考える。広告看板は見る人にインパクトを与えること、すなわち広告効果をもたらすことが目的で設置されるので、広告効果ができるだけ大きくなるように、各デザインの広告をどのように配置するのか、を決定することは重要である。すなわち、同じデザインの広告を異なる位置に配置するとき、これらの広告は、グルーピングされた広告と呼んでも良い。
また、PCやプリンタといった情報機器が屋内に複数設置されており、この機器群の中からユーザが居る場所からアクセスしやすい機器群を選び、それらの機器の電源をあらかじめ電源を投入する処理を考える。このとき、アクセスしやすい機器群を特定するアドレス等の情報は「グルーピングされた情報」に相当する。このような処理を行うことによって、情報機器のユーザは、機器に近付いて自ら電源を入れる動作をすることなく、これら情報機器を利用することができる。
コンテンツデータを管理するコンテンツデータ管理装置であって、複数のコンテンツデータのうちの2つのデータにタグ付けされた位置と時刻から2つのコンテンツデータが生成された2つの位置の間の移動の速度を求め、速度に基づいてコンテンツデータについてグループ化を行う装置が知られている。たとえば、画像データであれば、速度とは、画像の撮影者が2つの画像が撮影された位置間を移動する際の平均移動速度である。画像データの場合、「速度」は、たとえば徒歩での移動、車での移動、電車での移動など、どのような移動手段を用いて移動しながら複数の画像を取得したか、に関する情報を含んでいる。同一のまたは類似の速度の移動手段を用いて移動しながら取得した画像をグルーピングすることによって、関連性の高いコンテンツデータをグルーピングできることがある。
広告看板のグルーピングでは、看板の位置と向きのみを考慮した分類では、次の理由で実態に即した分類が行われない可能性がある。すなわち、たとえば近距離で同じ方向を向いて立っている看板でも、人の移動パターンや周辺の空間構造によっては、広告効果が大きく異なる場合がある。直線距離ではなく経路距離を用いて分類したとしても、同様に実態に即した分類を行うのは難しい。広告効果の正確な実態調査のためには、人の行動パターンや空間構造なども含めて看板を分類する必要がある。
PCやプリンタといった情報機器が屋内に複数設置されており、この機器群の中からある場所にいる人からアクセスされやすい機器群を選び、それらの機器の電源をあらかじめ電源を投入する処理を考える。この場合、単純に直線距離によってグルーピングした機器群の電源をオンにすると壁を隔てて隣同士にある機器の電源が投入されてしまう可能性がある。経路距離を用いたとしても、機器の位置関係によっては人のアクセスのしやすさとは異なる基準でグルーピングされてしまう場合がある。
よって、一つの側面として、本発明は、移動体への情報の伝達効率を改善するように複数の情報をグルーピングするグルーピング装置、グルーピング方法、およびグルーピングプログラムを提供することを目的とする。
グルーピング装置が提供される。グルーピング装置は、第1の時刻と第2の時刻の間の複数の時刻において、空間に配置された複数の物体の各々に付与された複数の情報の各々と、空間内を移動する移動体の間の相関の強さを複数の情報の各々における関連性のレベルとして算出する関連性算出部と、複数の時刻において算出された複数の物体の各々における関連性のレベルから、複数の時刻における複数の情報のペアの各々に対する類似度を算出し、複数の時刻における複数の情報のペアの各々に対する類似度を積算し、積算類似度を算出する類似度算出部と、積算類似度に基づいて複数の情報をグルーピングする分類部と、を含むことを特徴とする。
移動体への情報の伝達効率を改善するように複数の情報をグルーピングすることができる。
以下、図面を参照しながら、一実施形態のグルーピング装置およびグルーピング方法について説明する。
<全般的説明>
まず図1〜5を参照して、位置情報が付与された情報のグルーピングについて説明する。
まず図1〜5を参照して、位置情報が付与された情報のグルーピングについて説明する。
ここで「位置情報が付与された情報」とは、人の居住空間である3次元空間中の位置に配置された情報であり得る。たとえば、広告、音声や画像の、無線LAN環境下でのパーソナルコンピュータ(PC)やPCの周辺機器などが挙げられる。これらの情報の「グルーピング」とは、異なる位置情報が付与された複数の情報を複数のグループに分配することを指す。
たとえば、PCやプリンタといった情報機器が屋内に複数設置されており、この機器群の中からある場所にいる人からアクセスされやすい機器群を選び、それらの機器の電源をあらかじめ電源を投入する処理を考える。各情報機器は、位置情報が付与された情報を持っている。たとえば、各情報機器はIPアドレス、MACアドレスなど、情報機器を特定する情報を持っており、その情報機器が置かれている位置情報と組み合わせることによって「位置情報が付与された情報」を構成する。
この場合、「アクセスされやすい機器群」がグルーピングされた情報機器に相当する。このような処理を行うことによって、情報機器のユーザは、機器に近付いて自ら電源を入れる動作をすることなく、これら情報機器を利用することができる。
また、「情報」は、たとえは情報記憶媒体に電子ファイルとして情報機器に格納される画像データ、音声データ、文書データ等のコンテンツデータであり得る。
まず、図1〜7を参照して、位置情報が付与された情報の「自然な」グルーピングという概念について説明する。
図1は情報の位置間の直線距離に基づいて情報をグルーピングの例を説明する図である。
図1に示されているオフィスは、部屋R1、R2、R3と廊下P1を含んでいる。部屋R1には情報機器102、104が配置されている。部屋R2には情報機器108、110が配置されている。部屋R3には情報機器106、118が配置されている。廊下P1には情報機器112、114が配置されている。
図1では、二つの情報機器の間の直線距離によってそれらの機器がグルーピングされるか否かが判定される。ここで、情報機器間の直線距離とは、部屋の壁によっては遮られない。つまり、たとえば、壁を隔てて配置されている二つの情報機器間の距離は、二つの情報機器を繋ぐ壁を通り抜ける直線の長さである。そして、二つの情報機器を繋ぐ直線距離が所定の値以下の場合、その二つの情報機器をグルーピングし、同一のグループにグルーピング(グループ化)する。図1の例では、以下の3つのグループが形成される。
グループA:情報機器104(部屋R1)、情報機器106(部屋R3)
グループB:情報機器102(部屋R1)、情報機器108(部屋R2)
グループC:情報機器112(廊下P1)、情報機器114(廊下P1)、情報機器110(部屋R2)、情報機器116(部屋R3)
グループA:情報機器104(部屋R1)、情報機器106(部屋R3)
グループB:情報機器102(部屋R1)、情報機器108(部屋R2)
グループC:情報機器112(廊下P1)、情報機器114(廊下P1)、情報機器110(部屋R2)、情報機器116(部屋R3)
上のグループ2に属する情報機器102と情報機器108は、別の部屋に配置されており、直線距離は壁を突き抜けている。仮に、情報機器間の通信が無線であるとしても、壁の構造によっては壁を通り抜ける際に信号強度が大きく減衰することもあり、情報機器102と情報機器108を同一のグループに分類することが「自然」なグルーピングとは言い難い。よって、情報機器間の直線距離を用いたグルーピングは「自然」ではないことがある。
図2は、情報の位置間の経路距離に基づいて情報をグルーピングの例を説明する図である。
図2では、二つの情報機器の距離を経路距離で計測する。ここで、「経路距離」は、人間の動線に沿った距離によって定義される。
経路距離に基づいてグルーピングした場合、以下の2つのグループが形成される。
グループD:情報機器104(部屋R1)、情報機器106(部屋R3)
グループE:情報機器112(廊下P1)、情報機器114(廊下P1)、情報機器110(部屋R2)、情報機器116(部屋R3)
グループD:情報機器104(部屋R1)、情報機器106(部屋R3)
グループE:情報機器112(廊下P1)、情報機器114(廊下P1)、情報機器110(部屋R2)、情報機器116(部屋R3)
この場合、上のグループBの情報機器102(部屋R1)と情報機器108(部屋R2)の間の経路距離は、廊下P1を経由したものとなり、情報機器102と情報機器108がグルーピングされるほど小さくない。情報機器104と情報機器106は、それぞれ部屋R1と部屋R3に配置されているが、両者間の経路距離は直線距離とそれほど違わず。情報機器104と情報機器106は、経路距離に基づいてグルーピングするか否かを判定する場合でも、グルーピングされる。
このように、経路距離に基づいてグルーピングを行っても、異なる部屋に配置されている情報機器が同じグループにまとめられる。よって、情報機器間の経路距離を用いたグルーピングは「自然」ではないことがある。
図3は、情報の位置が属する区画に基づいて情報をグルーピングの例を説明する図である。
図3では、区画Aと区画Bが示されており、各区画内にある情報機器を一つのグループとみなす。
グループF(区画A):情報機器106、情報機器116、情報機器118
グループG(区画B):情報機器110、情報機器114
グループF(区画A):情報機器106、情報機器116、情報機器118
グループG(区画B):情報機器110、情報機器114
このように事前に定めた区画によってグルーピングを行うと、区分け作業に手間が掛かり、区画の定め方に任意性が入り込む余地がある。
図4は、情報の「自然な」グルーピングの例を説明する図である。
図4では、次の4つのグループが形成されている。
グループH(部屋R1):情報機器102、情報機器104
グループI(部屋R2):情報機器108、情報機器110
グループJ(廊下P1):情報機器112、情報機器114
グループK(部屋R3):情報機器106、情報機器116、情報機器118
図4では、次の4つのグループが形成されている。
グループH(部屋R1):情報機器102、情報機器104
グループI(部屋R2):情報機器108、情報機器110
グループJ(廊下P1):情報機器112、情報機器114
グループK(部屋R3):情報機器106、情報機器116、情報機器118
この場合、グルーピングされる情報機器は同じ部屋内にあり、情報機器の間には壁は存在しない。また、グルーピングされる情報機器は同じ部屋内に配置されているので、互いの経路距離も短い。
図4に示されているような自然なグルーピングをするためには、情報機器の間の距離による分類では不十分である。PCやプリンタといった情報機器が屋内に複数設置されており、この機器群の中からある場所にいる人からアクセスされやすい機器群を抽出し、それらの機器の電源をあらかじめ電源を投入する処理を行う場合、単純距離によってグルーピングした機器群の電源をオンにすると壁を隔てて隣同士にある機器の電源が投入されてしまう可能性がある。経路距離を用いたとしても、機器の位置関係によっては人のアクセスのしやすさとは異なる基準でグルーピングされてしまう場合があり、非効率である。
図5Aは、情報の自然なグルーピングで区別したい情報の例を示す図、図5Bは、情報の自然なグルーピングでまとめたい情報の例を示す図である。
図5Aでは、2つの区画が存在し、それぞれの区画に1つモノが配置されている。図5Bでは、1つの区画に2つのモノが配置されている。図5Aに示されている2つの物体に付与されている情報は、互いに異なるグループに属するとみなし、図5Bに示されている2つの物体に付与されている情報は、同じグループに属するとみなしたい。このように、「自然なグルーピング」では情報の間の距離だけでなく、情報が付与されている物体が配置されている空間の構造、たとえば障害物が考慮される。
図6は、情報の自然なグルーピングが適用される状況の例を説明する図である。
図6は、広告のグルーピングの例を示している。この例では、「情報」は広告のデザインである、
図6は、広告のグルーピングの例を示している。この例では、「情報」は広告のデザインである、
連続する何種類かのデザインの広告で、各デザインについて複数枚の広告看板が存在するとする。「位置情報が付与された情報」とは、広告看板の位置に関する情報が付与された広告のデザインであり得る。
複数の広告看板について、広告効果の類似した広告が付与された広告看板同士を一つのグループにまとめて設置することが考えられる。広告効果とは、その広告看板を見る人に与えるインパクトであってもよい。同じデザインの広告が「グルーピングされた情報」に相当する。広告看板は見る人にインパクトを与えることが目的で設置されるので、同じデザインの広告看板をどのように配置するのか、を決定することは重要である。
図6では、ある空間に広告看板302、304、306、308、310、312、314、316、318、320は配置されている。これらの広告看板に付与される広告を、広告効果が上昇するように、一つまたは複数のグループに区分けする。
点線は広告看板が配置されている空間を移動する移動体200の軌跡である。移動体200は、人であったり、車両であったり、その他、広告看板に付与されている広告を認識しながら移動するものであれば良い。移動体が車両であるとき、広告は標識であっても良い。
図6において、移動体200は時刻t=T1に位置x=P1に存在する。位置x=P1の近くには広告看板302、304、306に付与された情報が存在する。ここで、「ある位置に近い」とは、距離が所定の値以下であると定義しても良い。また、後述のようにポテンシャルモデルを用いる場合には、ポテンシャルのレベルの差が所定の値(第1の閾値)以下の場合、両者は近いと定義しても良い。さらに、これらの広告看板302、304、306は、互いの距離が所定の値(第2の閾値)以下である。
移動体はその視界に収まる広告看板に付与された広告を認識することができる。たとえば、時刻t=T1において移動体は広告看板304、306に付与された広告を認識することができる。よって情報の自然なグルーピングでは、広告看板304に付与された情報、すなわち広告と広告看板306に付与された広告がグルーピングされる。
また、移動体200は時刻t=T2に位置x=P2に存在する。時刻t=T1に位置x=P1に居た移動体200が位置x=P2に到達したとき、移動体の視野に入っており、且つ移動体200からの距離が所定の値より小さい広告看板は、広告看板314、316、318である。さらに、広告看板314、316、318に付与された広告は互いの距離が所定の値(第2の閾値)以下であるとする。よって情報の自然なグルーピングでは、これら広告看板314、316、318に付与された広告がグルーピングされる。
図6では、移動体200は時刻t=T3に位置x=P3に移動している。このとき、移動体の視野に入っており、且つ移動体からの距離が所定の値より小さい広告看板は、広告看板320である。よって、広告看板320は、グループG3を形成する。
このように、情報の自然なグルーピングでは情報を受ける側の動きを考慮することが必要であり得る。つまり、同時刻での情報へのアクセスのしやすさが同等であるものをできるだけグルーピングすることが望ましい。さらに、情報の利用者にできるだけ長い時間、相関を持つような情報をグルーピングすることが望ましい。
図7は、情報の自然なグルーピングが適用される状況の別の例を説明する図である。
図7では、広告看板502〜534が配置されている。また、広告看板502〜530が配置されている空間は、壁によって幾つかの区画、すなわち部屋R4、R5、R6、R7に区分けされている。部屋R4には、4つの広告看板502、504、506、508が配置されている。部屋R5には3つの広告看板510、512、514が配置されている。部屋R5と部屋R6を繋ぐ通路P2に2つの広告看板516、518が配置されている。部屋R6には、3つの広告看板520、522、524が配置されており、部屋R7には5つの広告看板526、528、530、531、534が配置されている。このように図7に示されている例では、広告看板が配置される空間に壁が存在し、空間が区分けされている。ここで、壁は不透明であるとし、空間内を移動する移動体400(人)は、壁を通り抜けての視認はできないものとする。各広告看板には、広告が付与されている。
図7では、広告看板502〜534が配置されている。また、広告看板502〜530が配置されている空間は、壁によって幾つかの区画、すなわち部屋R4、R5、R6、R7に区分けされている。部屋R4には、4つの広告看板502、504、506、508が配置されている。部屋R5には3つの広告看板510、512、514が配置されている。部屋R5と部屋R6を繋ぐ通路P2に2つの広告看板516、518が配置されている。部屋R6には、3つの広告看板520、522、524が配置されており、部屋R7には5つの広告看板526、528、530、531、534が配置されている。このように図7に示されている例では、広告看板が配置される空間に壁が存在し、空間が区分けされている。ここで、壁は不透明であるとし、空間内を移動する移動体400(人)は、壁を通り抜けての視認はできないものとする。各広告看板には、広告が付与されている。
移動体400は、時刻t=T4に位置x=P4に位置している。このとき、移動体400の視界に入っており、且つ移動体400からの距離が所定の値(第1の閾値)より小さい広告看板は、広告看板506、508に付与された広告である。また広告看板506に付与された広告と広告看板508に付与された広告の間の距離は、所定の値(第2の閾値)より小さいとする。よって情報の自然なグルーピングでは、これら広告看板506と508に付与されている情報がグルーピングされる。
時刻t=T4に位置x=P4にいた移動体400は、時刻t=T5には位置x=P5に移動している。このとき、移動体400の視界に入っており、且つ移動体400からの距離が所定の値(第1の閾値)より小さい広告は、通路P2に配置されている広告看板516、518に付与された広告である。また広告看板516に付与された広告と広告看板518に付与された広告の間の距離は、所定の値(第2の閾値)より小さいとする。よって情報の自然なグルーピングでは、これら広告看板516、518に付与されている情報がグルーピングされる。
時刻t=T5に位置x=P5にいた移動体400は、時刻t=T6には位置x=P6に移動している。このとき、移動体400の視界に入っており、且つ移動体400からの距離が所定の値(第1の閾値)より小さい広告看板は、広告看板526、528、530である。広告看板534に付与された広告は、視界には入っているが、移動体400からの距離は所定の値(第1の閾値)より大きい。また広告看板526、528、530に付与された広告について、互いの距離は、所定の値(第2の閾値)より小さいとする。よって情報の自然なグルーピングでは、これら広告看板526、528、530に付与されている情報がグルーピングされる。
上述のように、複数の広告看板についてその広告効果を調査するため広告効果の類似した看板同士をグルーピングする時、広告看板の位置と向きのみを考慮した分類では実態に即した分類が行われない可能性がある。たとえば、近距離で同じ方向を向いて立っている看板でも、人の移動パターンや周辺の空間構造によっては、広告効果が大きく異なる場合がある。直線距離ではなく経路距離を用いて分類したとしても、同様に実態に即した分類を行うのは難しい。広告効果の正確な実態調査のためには、広告を受ける人の行動パターンや空間構造なども含めて看板を分類する必要がある。
「情報の自然なグルーピング」は、同時刻での情報の利用者の情報へのアクセスのしやすさと関連している。ここで、情報へのアクセスのしやすさとは、情報の利用者または受け手が、情報へのアクセスのためにどれだけ追加の動作を行うのか、と関連している。人や車両などの移動体の動きには慣性があり、また進行方向と視界の中心は一致していることが多い。逆に、急な方向転換や、進行方向とは異なる方向を見ることは、大きな追加の動作が必要であり得る。また、移動体と情報が付与された物体との距離は短ければ短いほど、アクセスは容易である。同時刻での情報へのアクセスのしやすさが重要なのは、情報の利用者(受け手)は異なる時刻では異なる場所にいて、利用者は異なる時刻、場所で認識した情報を関連付けることは一般に容易ではないからである。
ここで、「利用者が情報にアクセスする」とは、たとえば、情報が広告であり、利用者は人である場合、その人の視野にその広告が含まれていることであり得る。また無線LAN環境下で、情報がプリンタであり、利用者はPCユーザである場合、そのPCからの指令によってそのプリンタが動作することであり得る。
また、「情報の自然なグルーピング」では、ある時刻における利用者(移動体)による複数の情報へのアクセスのしやすさが考慮されている。ある時刻に、利用者がどれだけ同等に複数の情報にアクセスしやすいかを、「情報へのアクセスのしやすさの同時性」と呼ぶことがある。たとえば、情報の利用者と物体に付与されている情報の距離、すなわち利用者と物体の間の距離だけでアクセスのしやすさが決まるものとする。たとえば、物体Aと物体Bは離れており、異なる時刻で、移動体と物体Aに付与されている情報の間の距離と、移動体と物体Bに付与されている情報の間の距離が等しくなるとする。このとき、時刻を考慮しなければ、移動体は、物体Aに付与されている情報と、物体Bに付与されている情報に同等にアクセスすることができる。しかしそれは異なる時刻において生じることであり、「自然なグルーピング」では、物体Aに付与されている情報と、物体Bに付与されている情報は、「情報へのアクセスのしやすさの同時性」が低いので、グルーピングされない。
また、移動する利用者がある情報にアクセスし得る領域にとどまる時間が長ければ長いほど、その情報へのアクセスはしやすい。このことを「情報へのアクセスのしやすさの継続性」と呼ぶことがある。ここで、2つの情報AとBについて考える。利用者にとって、情報Aにアクセスできる時間と、情報Bにアクセスできる時間は一致しているとする。しかし、その時間帯に重なりがなければ、利用者にとって、情報Aと情報Bはグルーピングされるべきものではない。
このように、「位置情報が付与された情報の自然なグルーピング」では、「アクセスのしやすさの同時性」と「アクセスのしやすさの継続性」がともに高いレベルであるような情報がグルーピングされる。
すなわち、「位置情報が付与された情報の自然なグルーピング」とは、
「情報の利用者にとって、同時刻での情報へのアクセスのしやすさの度合いが高く、情報の利用者にできるだけ長い時間、相関を持つような複数の情報を一つのグループにまとめること」…(*)
として定義され得る。この定義はまた、
「情報の利用者によるアクセスのしやすさの同時性と継続性が共に高い複数の情報を一つのグループにまとめること」…(**)
と言い換えることができる。
「情報の利用者にとって、同時刻での情報へのアクセスのしやすさの度合いが高く、情報の利用者にできるだけ長い時間、相関を持つような複数の情報を一つのグループにまとめること」…(*)
として定義され得る。この定義はまた、
「情報の利用者によるアクセスのしやすさの同時性と継続性が共に高い複数の情報を一つのグループにまとめること」…(**)
と言い換えることができる。
以下で説明するグルーピング装置は、情報の位置や、情報を受ける移動体と情報の距離だけでは決まらない自然なグルーピングを行うために、次のような処理を行う。ある時刻において、位置情報が付与された情報が存在する空間内を移動する移動体200、400と、各情報との関連性の強さを求める。移動体200、400と、各情報との関連性の強さは、移動体200、400の位置、向き、速度によって変化するように設計される。次に、移動体200、400と任意の2つの情報との関連性に対して、2つの関連性の間の相関の強さを示す類似性を求め、移動体200、400の状態が変化する度にその類似性を積算し正規化することにより積算類似度セットを生成する。そして、積算類似度セットを用いて情報の分類を行う。このように構成されるグルーピング装置を用いると、情報の利用者にとって、同時刻での情報へのアクセスのしやすさが同等であり、情報の利用者にできるだけ長い時間、相関を持つような複数の情報を一つのグループにまとめるため、情報の利用者に対する情報の伝達効率を改善することができる。
<グルーピング装置>
以下、図8〜19を参照して、一実施形態のグルーピング装置700について説明する。
以下、図8〜19を参照して、一実施形態のグルーピング装置700について説明する。
グルーピング装置700には、センサ600が接続されている。
センサ600とグルーピング装置700は組み合わされてグルーピングシステムを構成する。
センサ600とグルーピング装置700は組み合わされてグルーピングシステムを構成する。
センサ600は、移動体650に搭載される。移動体650は、たとえば、図6の移動体200、図7の移動体600であり得る。また、移動体650は、人、自動車、自転車等の車両、荷台等、向きを有する物体であり得る。センサ600には、たとえばグローバルポジショニングシステム(GPS)が搭載されており、センサ600の位置が特定できるように構成されている。さらに、センサ600は速度が計測できるように構成されていても良い。
グルーピング装置700は、測位部702、関連性算出部704、物体データ記憶部706、類似度算出部708、分類部710を含む。
測位部702は、センサ600で計測された移動体650の位置に関するデータを受ける。また、センサ600が移動体の速度を計測する場合は、移動体の速度に関するデータを受ける。そして、測位部702は、移動体の位置と方向を決定する。
また、測位部702は、時刻の計測をする。測位部702で計測された時刻は、関連性算出部704、物体データ記憶部706、類似度算出部708、分類部710でも共有され得る。ただし、時刻の計測は、測位部702以外で行われても良い。例えば、図示されていないクロックによって時刻を計測しても良い。この場合も、クロックによって計測された時刻は、測位部702、関連性算出部704、物体データ記憶部706、類似度算出部708、分類部710で共有され得る。
物体データ記憶部706には、「位置付けられた情報」が付与されている物体に関するデータが記憶されている。このデータには、移動体が移動する空間に配置された物体の位置、情報の向きが含まれ得る。また、その空間に壁等の障害物がある場合に物体データ記憶部706には、障害物の位置、材料等に関する情報が格納されていても良い。
関連性算出部704は、物体データ記憶部706に記憶されているデータを参照しながら、各物体に付与された情報と移動体650の関連性を算出する。
たとえば、ある物体の位置をXk、移動体650の位置をY、単調減少関数をF(x)とすると、Xkに位置する物体に付与された情報と移動体650の関連性rkは、

で定義される。
図9Aは、距離の逆数に依存する移動体と物体に付与された情報の関連性を表すグラフの例を示す図であり、図9Bは、距離の逆数に依存する移動体と物体に付与された情報の関連性を表すグラフの別の例を示す図である。
図9A〜9Bは、Xkに位置する物体に付与された情報と移動体650の関連性rkを
と定義した場合の、関連性rkの距離dk=|Xk―Y|依存性を示すグラフである。図9Aではα=1.00、図9Bではα=5.00である。
図10Aは、距離に対して線形に依存する移動体と物体に付与された情報の関連性を表すグラフの例を示す図であり、図10Bは、距離に対して線形に依存する移動体と物体に付与された情報の関連性を表すグラフの別の例を示す図である。
図10A〜10Bは、Xkに位置する物体に付与された情報と移動体650の関連性rkを
と定義した場合の、関連性rkの距離dk=|Xk―Y|依存性を示すグラフである。図10Aではα=0.25、図10Bではα=1.00である。
図11は、近傍モデルを用いた移動体とオブジェクトの関連性を表すグラフの例を示す図である。
ここで、近傍モデルについて説明する。
図12は近傍モデルの概要を説明する図である。
図12は近傍モデルの概要を説明する図である。
図12では移動体(人)Hの位置をポテンシャルが最大となる位置として、移動体Hの前方、移動不可能な壁を避けるように、ポテンシャル等高線が広がっていることが分かる。ポテンシャルのレベルが有限である領域は、移動体Hが視認できる区間と関連している。よって、移動体Hと情報機器A、B、Cの関連性は、図11のように移動体Hと情報機器A、B、Cの間の距離について単調減少する。近傍モデルでは、壁を通過するような移動体Hが移動不可能な経路に沿って関連性は急峻に減少することである。図12では、移動体Hと情報機器Aは関連性は非零であるが、壁によって隔てられている移動体Hと情報機器Cの関連性は、ほぼ0であることが分かる。
ポテンシャルの表現として最も一般的に用いられるものに、ラプラスポテンシャルがある。ラプラスポテンシャルは、ラプラス方程式:
の解として表すことができる。δ関数は引数が0の場合には値を、それ以外では0となる関数である。ラプラス方程式の解には、次のような特徴と利点がある。すなわち、ラプラス方程式の解は、連続で滑らかであり、最大点の他に極値が存在しない。よって、移動体の存在位置を最大、壁面を最小とする分布を生成することによって、移動体を中心として壁を避けて拡がる形を、自然に表現するのに適している。また、ラプラス方程式の解は、場所の関数であるため、地図上の任意の点に量(ポテンシャルの標高)が存在する。これは移動体の位置(ポテンシャル中心)から離れるにつれ減少する量であるため、移動体との経路を考慮した距離の指標として利用するのに適している。これらの利点より、近傍領域の表現方法としてラプラスポテンシャルを用いることができる。壁などの障害物の存在は、障害物の表面でラプラス方程式の解は、φ=0の境界条件を満たすという要請を置くことで考慮することができる。
このとき、Xkに位置する物体に付与された情報と移動体650の関連性rkは、ラプラス方程式の解φ(x)を用いて、
で定義され得る。これは、言い換えると、ラプラス方程式のφ(x)の等レベル線を描いた時、等レベル線に直交する線に沿ったXkに位置する物体と移動体650の距離に関連する。このとき壁の表面でラプラス方程式の解はφ=0の境界条件を満たすので、等レベル線に直交する線は障害物を通過しない。
関連性算出部704において、上記[数4]のような偏微分方程式を数値的に解く際は、空間を格子に分割して計算を行なうが、ラプラス方程式は楕円型の偏微分方程式であり、これら格子の値を陽に求めることができず、分割してできた格子の数を変数とする大規模な連立方程式を解く必要がある。これには多くの計算時間がかかる。壁のような障害物が存在する空間に分布するポテンシャルを表現するためには、格子の数(空間の解像度)が増加しがちである。また、複数の移動体について同時に計算する場合があることを考えると、一般的な格子解法は時間がかかりすぎて利用できない。
そこで関連性算出部704では、計算時間の問題に対応するため、代用電荷法を応用してポテンシャルの生成計算を行なう。代用電荷法を応用することにより、ポテンシャルの生成時間を短縮することができる。
代用電荷法とは、偏微分方程式の近似解法である。代用電荷法は、単純なアルゴリズムであるため、近似解を得るために必要な計算時間が短く、なめらかな境界に対しては比較的高い近似精度が得られる特徴がある。反面、代用電荷法は、境界形状が複雑である場合には、誤差が増加して適用が困難という特徴をもっている。代用電荷法のアルゴリズムを次に述べる。
代用電荷法においては、上述のように、標本点および電荷点を定める。代用電荷法においては、以下の処理が行われる。
(処理1)ポテンシャルを求める解析領域を領域Ωとし、領域Ωの内部に標本点Xi(i=1、2、・・・、n:nは自然数)を選ぶ。
(処理2)選択した各標本点Xiの位置に対応するポテンシャルの値biを指定する。
(処理3)領域Ωの外側に、電荷点Yi(i=1、2、・・・、n:nは自然数)を選ぶ。
(処理4)解u(X)を以下の[式6]のように仮定し、式2によって、u(Xi)が指定した条件biを満たすように係数Qiを決定する。
(処理1)ポテンシャルを求める解析領域を領域Ωとし、領域Ωの内部に標本点Xi(i=1、2、・・・、n:nは自然数)を選ぶ。
(処理2)選択した各標本点Xiの位置に対応するポテンシャルの値biを指定する。
(処理3)領域Ωの外側に、電荷点Yi(i=1、2、・・・、n:nは自然数)を選ぶ。
(処理4)解u(X)を以下の[式6]のように仮定し、式2によって、u(Xi)が指定した条件biを満たすように係数Qiを決定する。
ここで、|X−Yi|は、標本点Xと電荷点Yiとの距離を表す。
代用電荷法においても、最終的にはこの連立方程式を解く必要がある。しかし未知数の数が従来の格子解法と比較して少なくなるため、計算に要する時間が圧倒的に短くなる。
代用電荷法では、解析する空間の境界に沿って電荷・標本点を幾つか選ぶことにより、境界間を滑らかに分布し、かつ境界上で指定した条件を満たすポテンシャルが計算される。この性質を用いて、障害物の表面に沿って標本点と対応する電荷点とを配置することにより、グルーピング装置700の関連性算出部704は、は、空間内の通行可能領域に沿って拡がるポテンシャル分布を生成することができる。
図13は、人の動きと連動して変化するポテンシャルの例を示す図である。
図13では、壁920に囲まれた空間内に障害物902、904、906、908、910、912、914、916が配置されている。移動体は位置Pにあるものとする。図13は、位置Pにおいて最大値となるポテンシャルの等高線を示している。等高線は、壁920と障害物902を避けるように、広がっていることが分かる。
上では関連性rkを、情報が付与されている物体の位置と移動体650の位置のみで決める場合を説明したが、関連性算出部704は関連性rkを、情報の向きや移動体650の速さ、向きを考慮しても算出しても良い。
たとえば、情報が付与されている物体の位置をXk、情報の向きをVkとする。また、移動体650の位置をY、向きをVYとする。向きV1、VYは大きさ1の単位ベクトルであっても良い。
このとき関連性算出部704は、Xkに位置する物体に付与される情報と移動体650の関連性rkを、
によって定義しても良い。この式は、Xkに位置する物体に付与される情報と移動体との距離が小さく、なおかつ情報の向きと移動体の向きが対向しているほど高くなる値である。なお、この式は移動体と情報が互いに反対方向を向いている場合も高くなるが、その場合は、向きVkとVYの外積を計算し、その計算結果の符号から互いに正反対方をいている場合を判定できるので、その場合はrk=0としても良い。
また関連性算出部704は、[数5]のポテンシャルφ(x)を用いて、Xkに位置する物体に付与される情報と移動体650の関連性rkを、
によって定義しても良い。この場合、関連性rkは、ポテンシャルに直交する線に沿った距離が短いほど大きく、また物体に付与された情報の向きVkと移動体の向きVYが互いに向き合っているときに大きくなる。
図14は、移動体の可視範囲と広告看板の関係の例を示す図である。図14では空間の構造を考慮した場合の関連性rkの決め方の例を説明している。
図14で、移動体は人1000であり、領域Aは人1000の視界に含まれる可視範囲である。人1000と同じ空間には情報が付与された物体1002、1004、1006、1008が存在する。このとき、領域Aに含まれない物体については、関連性rk=0と定めても良い。
関連性算出部704でXkに位置する物体に付与される情報と移動体650の関連性rkを算出した後、類似度算出部708は、情報の全てのペアについて、類似度C(i、j)を算出する。情報の全てのペアについての類似度C(i、j)の集まり{C(i、j)}を類似度セットと呼ぶことがある。たとえば類似度算出部708は、Xiに位置する物体に付与される情報とXjに位置する物体に付与される情報との間の類似度C(i、j)を算出する。類似度C(i、j)は、値が大きいほど、Xiに位置する物体に付与される情報とXjに位置する物体に付与される情報は「類似」しており、グルーピングされる可能性が大きくなる。もし、物体がn個あるとすると、類似度C(i、j)は(1/2)n(n−1)個の独立成分を持つ。(1/2)n(n−1)個の類似度の組を類似度セットと呼ぶことがある。
たとえば、Xiに位置する物体に付与される情報とXjに位置する物体に付与される情報との間の類似度C(i、j)は、Xiに位置する物体に付与される情報とYに位置する移動体の間の関連性riと、Xjに位置する物体に付与される情報とYに位置する移動体の間の関連性rjとして、
(C1)添え字iとjの入れ替えに関して対称、すなわちC(i、j)=C(j、i)、
(C2)どちらかの関連性が0の場合、類似度C(i、j)は0、
(C3)riとrjの値が高く、かつ両者の差が少ないほど高い値となる、
のような性質を有することが好ましい。
(C1)添え字iとjの入れ替えに関して対称、すなわちC(i、j)=C(j、i)、
(C2)どちらかの関連性が0の場合、類似度C(i、j)は0、
(C3)riとrjの値が高く、かつ両者の差が少ないほど高い値となる、
のような性質を有することが好ましい。
たとえば、ある時刻tにおける類似度C(i、j)を、
と定義しても良い。これは関連性riと関連性rjの値が高く、なおかつ両者の差が少ないほど高い値となる式である。どちらかの関連性が0の場合、類似度C(i、j)は0となる。類似度C(i、j)は添え字iとjの入れ替えに関して対称なので、C(i、j)=C(j、i)である。類似度セットを行列形式で表すと、
と書くことができる。行列Cは、移動体がある位置Yにいるとき、物体に付与される情報との関連性の類似度を表している。
上記では、移動体が位置Yにあるときの位置Xiにある物体に付与される情報と位置Xjにある物体に付与される情報の間の類似度C(i、j)を[数5]によって定義したが、(C1)〜(C3)を満足する別の式によって定義しても良い。
この類似度C(i、j)は、ある時刻tに移動体が位置Yにあるとき、移動体から位置Xiにある物体に付与される情報と位置Xjにある物体に付与される情報がどの程度、同等に認識し得るかを示している。
類似度算出部708ではさらに、行列Cで表される類似度のセットを移動体が移動する度に算出し、積算し積算類似度を算出する。
たとえば、時刻tにおける類似度セットをC(t)とすれば、積算類似度C*は、
である。積算類似度C*は、C* (i、j)を要素とする行列である。ここで、行列に関する積分は行列要素ごとに積分したものを行列形式で表記する、すなわち、
で定義されるものとする。[数8]、[数9]では時間は連続変数であるかのように表記しているが、実際にはセンサ600は、移動体650の位置、向き等の情報は時間に関して離散的に取得する。よって、上記[数8]、[数9]は、下記[数16]のように、離散系を近似的に連続変数tを用いて表しているとみなすことができる。
上記[数8]、[数9]での積分範囲は、ある時刻から別の時刻までであるが、たとえば、移動体がある位置から別の位置に到達するまでの期間であってもよい。
また、行列C*は、最大の要素で各要素を割って正規化しても良い。ある程度の期間、積算を続けて求まった類似度の行列C*には、移動体の移動パターンが反映されている。行列C*は、積算類似度の組を提供する。
上では、移動体は1つであった。しかし、移動体が複数ある場合にも上記の説明は容易に拡張することが可能である。
分類部710は、類似度算出部708で算出された類似度に基づいて、情報のグルーピングを行う。分類部710は、たとえば類似度の行列C*の要素値を強度とするリンクによって結合された関連性グラフを生成し、結合強度が閾値以下の要素のリンクを切断することによって、グルーピングを行う。
図15は積算類似度の組の例を示す表である。
図15の表は、情報A、B、C、Dに対する積算類似度の組を表す4×4の対称行列C*の行列要素の例を示している。たとえば、C(A、B)要素の値は0.9であり、C(A、C)要素の値は0.2である。
図16は、図15に示された積算類似度の組から生成された関連性グラフの例を示す図である。たとえば、C(A、B)要素の値は0.9であることを反映して、節点Aと節点Bをつなぐリンクの強さは0.9である。同様に、節点Aと節点Cをつなぐリンクの強さは0.2、節点Aと節点Dつなぐリンクの強さは0.3、節点Bと節点Cつなぐリンクの強さは0.3、節点Bと節点Dつなぐリンクの強さは0.7である。
分類部710は、図16に示されたグラフで、たとえばリンクの強さが閾値である0.5より小さいものについては切断をする。閾値は、二つの情報が類似しているか否か、すなわちグルーピングするか否かを分類する境界の値である。すると、図15に示されたグラフの場合、節点Aと節点Bをつなぐリンク(リンクの強度0.9)と、節点Aと節点Bをつなぐリンク(リンクの強度0.7)が残る。よって、分類部710は、情報AとBをグルーピングしグループGaとし、情報CとDをグルーピングしてグループGbとする。
情報の数が大量であった場合、それに応じて[数9]の類似度の行列C*のサイズも大きくなる。
図16では、リンクの強さは一つの閾値によって分類されたが、互いに異なる複数の閾値を用いて階層的なグルーピングを行っても良い。
図17は積算類似度の組の別の例を示す表である。
図17は、情報A、B、C、D、E、F、G、Hに対する積算類似度の組を表す8×8の対称行列C*の行列要素の例を示している。この場合、図17に示されている行列C*から生成されるグラフにおいて、リンク強さを分類する閾値を段階的に緩めて複数回行えば階層的に分類を行うことがきできる。この結果はデンドログラム(樹状図)として可視化するなどすれば、体系化された分類が可能となる。このとき、「階層的なグルーピング」が行われたと呼ばれる。この「階層的なグルーピング」を行うためには、グラフ理論の階層的クラスタリングの理論を適用することが可能である。
階層的クラスタリングの理論では、たとえば、次のような処理を行う。x1〜xNのN個の対象からなるデータが与えられたとき、初期状態として1個の対象だけを含むN個のクラスタがある状態を作る。対象xiと対象xjの距離d(xi、xj)(非類似度)からクラスタ間の距離d(C1、C2)を計算し、この距離が最も近い2つのクラスタを逐次的に併合する。このような処理の結果は、デンドログラム(樹状図)によって表すことができる。デンドログラムとは,各終端ノードが各対象を表し、併合されてできたクラスタを非終端ノードで表した二分木である。クラスタ間の距離d(C1、C2)を表す関数によって幾つかの手法がある。たとえば、最短距離法では、クラスタ間の距離d(C1、C2)は、クラスタC1、C2のそれぞれに含まれる対象間の距離の最小距離として定義される。最長距離法では、クラスタ間の距離d(C1、C2)は、クラスタC1、C2のそれぞれに含まれる対象間の距離の最大距離として定義される。他にはクラスタC1、C2のそれぞれに含まれる対象間の距離の平均をクラスタ間の距離d(C1、C2)として定義する群平均法、各対象から,その対象を含むクラスタのセントロイドまでの距離の二乗の総和を最小化するWard法などが知られている。階層的なグルーピングでは、上記の任意の手法を適用することができる。
図18は、図17に示された積算類似度の組から生成されたデンドログラムの例を示す図である。
たとえば、図18において、情報A、B、Cに着目すると、情報Aと情報Bの間の類似度C(A、B)の値は0.07、情報Aと情報Cの間の類似度C(A、C)の値は0.31、情報Bと情報Cの間の類似度C(B、C)の値は0.21である。図18に示されているように、類似しているか否か、すなわちグルーピングするか否かを分類する閾値の値を徐々に増やしていくと、まず情報Bと情報Cがグルーピングされる。情報Bと情報Cがグルーピングされて構成するグループをG(B、C)とする。さらに閾値の値を徐々に増やしていくと、情報Aと情報Cがグルーピングされる。情報Cはすでに情報Bとグルーピングされているので、情報Aと情報Cがグルーピングされることにより、階層的なグルーピングが実現する。
図18に示されているように、階層的なグルーピングでは、閾値が大きくなるにつれ、グルーピングされるエリアは徐々に大きくなる。
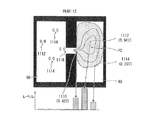
図19Aは、近傍モデルでの情報の自然なグルーピングの例を説明する図であり、図19Bは、近傍モデルでの情報の自然なグルーピングの別の例を説明する図である。図19A、19Bにおいて、参照符号で指定される物体に付与される関連性rkのレベルは、参照符号と共に括弧内に示されている。たとえば、図19Aでは、時刻t1に移動体は位置P1にいて、移動体が存在する部屋と同じ部屋R8には、情報が付与されている物体1102、1104、1106、1108が存在する。移動体と物体1102に付与されている情報との関連性のレベルは0.461である。移動体と物体1104に付与されている情報との関連性のレベルは0.0.695である。位置P1にいる移動体と部屋R9に配置されている物体1110、1112、1114に付与されている情報との関連性のレベルはいずれも0.0である。
また、たとえば図19Bに示されているように、時刻t2に移動体は位置P2に居て、移動体が存在する部屋と同じ部屋R9には、物体1110、1112、1114が存在する。移動体と物体1110に付与されている情報との関連性のレベルは0.422である。位置P2にいる移動体と部屋R8に配置されている物体1102、1104、1106、1108に付与されている情報との関連性のレベルは0.0である。
このように時刻t1においては、移動体と同じ部屋R8に配置されている物体1102、1104、1106、1108に付与されている情報との関連性のレベルが高い。一方、移動体が部屋R9に移ってしまった時刻t2では、移動体と部屋R8に配置されている物体1102、1104、1106、1108に付与されている情報との関連性のレベルは低い。このように、関連性rはある時刻に移動体と情報が近い位置に存在するときに、レベルが高くなる。
類似度Cは、上述のように、複数の情報のうちXiに位置する情報とXjに位置する情報の類似度C(i、j)を、Xiに位置する情報とYに位置する移動体の間の関連性riと、Xjに位置する情報とYに位置する移動体の間の関連性rjを用いて、
(C1)C(i、j)=C(j、i)、すなわち添え字iとjの入れ替えに関して対称、
(C2)関連性ri、関連性rjのいずれかが0の場合、C(i、j)=0、
(C3)関連性riおよび関連性rjの値が高く、かつ関連性riと関連性rjの差が少ないほど高い値となる、
という性質を有する。たとえば、図19Aでは物体1102、1104は、共にレベルの値自体が高く、両者の差が小さいので、類似度は高くなる。また、たとえば、異なる部屋に配置されている物体1102と物体1110に付与されている情報同士の類似性は0である。
(C1)C(i、j)=C(j、i)、すなわち添え字iとjの入れ替えに関して対称、
(C2)関連性ri、関連性rjのいずれかが0の場合、C(i、j)=0、
(C3)関連性riおよび関連性rjの値が高く、かつ関連性riと関連性rjの差が少ないほど高い値となる、
という性質を有する。たとえば、図19Aでは物体1102、1104は、共にレベルの値自体が高く、両者の差が小さいので、類似度は高くなる。また、たとえば、異なる部屋に配置されている物体1102と物体1110に付与されている情報同士の類似性は0である。
関連性rを時間積分して得られる積算類似度C*について考える。積算類似度C*の要素は、情報が付与さえた物体が移動体の視野に含まれる時間が長ければ長いほど、大きくなる。
上記のようなグルーピング装置700では、情報の利用者の動きの経路と、ある時刻での情報へのアクセスのしやすさを考慮した「情報の自然なグルーピング」を行うことができる。
たとえば、物体が広告看板で、情報が広告の場合、広告効果の強弱のみによる分類ではなく、同時性も含めた分類となる。つまり、広告を見る人の行動パターンを考慮したうえで、広告効果が同時に高くなる広告看板同士がまとめられる。この分類方式によると、物理的に近い距離にあり同じ方向を向いて立っている看板があったとして、なおかつそれらの広告効果がそれぞれ高くなる場合があっても、2つの広告看板の広告の広告効果が同時に高くなる瞬間がなければ、2つの看板はグルーピングされない。すなわち広告効果という視点で情報のユーザの行動パターンや空間構造まで含めて解釈すれば、物理的には似た看板であっても異なるグループに属するということがわかるようになる。
図20は、ポテンシャルによる近傍モデルを用いた情報のグルーピングの結果の例を示す図である。図20では、各物体に付与されている情報と移動体との関連性のレベルが、各物体ごとに表されている。
図20では、点線のような経路Qを通って位置Pに到達した移動体が存在するとき、物体に付与された情報のグルーピングの様子を示している。関連性は上記の近傍モデルを用いて算出している。図20に示されているように、移動体の経路Qに近く、しかも移動体がその近くに滞在する時間が長い物体に付与された情報に、関連性のレベルが高い。また、壁を隔てた物体に付与されている情報同士はグルーピングされていない。
図20に示されているように、人の情報機器へのアクセスのしやすさとして、パーソナルコンピュータ(PC)やプリンタなどの情報機器とそれら情報機器を利用するユーザの関連性の強さを定めれば、その分類の結果は「ユーザの情報機器へのアクセスのしやすさ」という基準でまとまっていることになるため、これを用いて人からアクセスしやすくなった機器群を検知し、その機器らの電源をあらかじめ投入するなどの処理を行うことが可能となる。
図21は、実施形態のグルーピング装置700の構成の例を示す図である。グルーピング装置700は、汎用コンピュータ800として実現され得る。
このコンピュータ800は、MPU802、ROM804、RAM806、ハードディスク装置808、入力装置810、表示装置812、インタフェース装置814、及び記録媒体駆動装置816を備えている。なお、これらの構成要素はバスライン820を介して接続されており、MPU802の管理の下で各種のデータを相互に授受することができる。
MPU(Micro Processing Unit)802は、このコンピュータ800全体の動作を制御する演算処理装置であり、コンピュータ800の制御処理部として機能する。
ROM(Read Only Memory)804は、所定の基本制御プログラムが予め記録されている読み出し専用半導体メモリである。MPU802は、この基本制御プログラムをコンピュータ800の起動時に読み出して実行することにより、このコンピュータ500の各構成要素の動作制御が可能になる。
RAM(Random Access Memory)806は、MPU802が各種の制御プログラムを実行する際に、必要に応じて作業用記憶領域として使用する、随時書き込み読み出し可能な半導体メモリである。
ハードディスク装置808は、MPU802によって実行される各種の制御プログラムや各種のデータを記憶しておく記憶装置である。MPU802は、ハードディスク装置808に記憶されている所定の制御プログラムを読み出して実行することにより、後述する各種の制御処理を行えるようになる。
入力装置810は、例えばマウス装置やキーボード装置であり、グルーピング装置700の利用者により操作されると、その操作内容に対応付けられている各種情報の入力を取得し、取得した入力情報をMPU802に送付する。
表示装置812は例えば液晶ディスプレイであり、MPU802から送付される表示データに応じて各種のテキストや画像を表示する。
インタフェース装置814は、このコンピュータ800に接続される各種機器との間での各種情報の授受の管理を行う。
記録媒体駆動装置816は、可搬型記録媒体818に記録されている各種の制御プログラムやデータの読み出しを行う装置である。MPU802は、可搬型記録媒体818に記録されている所定の制御プログラムを、記録媒体駆動装置816を介して読み出して実行することによって、後述する各種の制御処理を行うようにすることもできる。なお、可搬型記録媒体818としては、例えばUSB(Universal Serial Bus)規格のコネクタが備えられているフラッシュメモリ、CD−ROM(Compact Disc Read Only Memory)、DVD−ROM(Digital Versatile Disc Read Only Memory)などがある。
このようなコンピュータ800を用いてグルーピング装置700を構成するには、例えば、上述の各処理部における処理をMPU802に行わせるための制御プログラムを作成する。作成された制御プログラムはハードディスク装置808若しくは可搬型記録媒体818に予め格納しておく。そして、MPU802に所定の指示を与えてこの制御プログラムを読み出させて実行させる。こうすることで、グルーピング装置700が備えている機能がMPU802により提供される。
このように、グルーピング装置700は、情報の利用者にとって、同時刻での情報へのアクセスのしやすさが同等であり、情報の利用者にできるだけ長い時間、相関を持つような複数の情報を一つのグループにまとめるため、情報の利用者に対する情報の伝達効率を改善することができる。
<グルーピングの処理>
図22は、グルーピングにおける処理の流れの例を示すフローチャートである。
図22は、グルーピングにおける処理の流れの例を示すフローチャートである。
また、グルーピング装置700が図21に示されているような汎用コンピュータ800である場合には、下記の説明は、そのような処理を行う制御プログラムを定義する。すなわち、以下では、下記に説明する処理を汎用コンピュータに行わせる制御プログラムの説明でもある。
処理が開始されると、S102でグルーピング装置700の測位部702は、時刻をt=0とリセットする。そして、本ステップの処理が終わると、S104に進む。
S104でグルーピング装置700の測位部702は、時刻をΔtだけ進める。そして、本ステップの処理が終わると、S106に進む。
S106でグルーピング装置700の測位部702は、移動体の位置を計測する。このとき、移動体の方向、すなわち進行方向を計測しても良い。そして、処理はS108に進む。
S108でグルーピング装置700の関連性算出部704は、物体データ記憶部706に記憶されているデータを参照しながら、各物体と移動体の関連性を算出する。そして、本ステップの処理が終わると、S108に進む。
たとえば、ある物体の位置をXk、移動体650の位置をY、単調減少関数をF(x)とすると、Xkに位置する物体と移動体650の関連性rkを
によって算出する。上記[数13]は具体的には、[数2]、[数3]、[数5]のいずれかであっても良い。そして、本ステップの処理が終わると、S110に進む。
S110でグルーピング装置700の類似度算出部708は、物体の全てのペアについて、類似度C(i、j)を算出する。
Xiに位置する物体に付与される情報とXjに位置する物体に付与される情報と間の類似度C(i、j)は、Xiに位置する物体とYに位置する移動体の間の関連性riと、Xjに位置する物体とYに位置する移動体の間の関連性rjを用いて、上記(C1)〜(C3)を満たす関数であることが好ましい。一例として、類似度C(i、j)は、上述のように、
であっても良い。
物体の全てのペアについての時刻tにおける類似度C(i、j)(t)の集まり{C(i、j)(t)}を類似度セットと呼ぶことがある。そして、本ステップの処理が終わると、S112に進む。
S112でグルーピング装置700の類似度算出部708は、既存の類似度セットにS110で算出された類似度C(i、j)を足して時刻tにおける積算類似度C*を算出する。すなわち、
を計算する。ここで、C(t)は行列であるので、上記[数15]は行列方程式である。そして、本ステップの処理が終わると、S114に進む。
S114でグルーピング装置700の類似度算出部708は、積算類似度C*を正規化する。正規化の仕方としては、たとえば、積算類似度C*の最大の行列要素で、各要素を割っても良い。本ステップの処理が終わると、S116に進む。
S116でグルーピング装置700の分類部710は、S110〜S114で算出された類似度に基づいて、情報のグルーピングを行う。たとえば、類似度の行列C*の要素値を強度とするリンクによって結合された関連性グラフを生成し、結合強度が閾値以下の要素のリンクを切断することによって、グルーピングを行う。グルーピングの例は、図16に示されている。本ステップの処理が終わると、S118に進む。
S118でグルーピング装置700の分類部710は、終了条件を満足しているかどうかを判定する。終了条件は、特定の移動体がある位置に到達したか否かであっても良い。また終了条件は、所定の時間を経過しかた否かであっても良い。また、本ステップの処理は分類部710以外の構成要素、たとえば測位部702で処理されても良い。本ステップの判定の結果が”Yes”、すなわち終了条件を満足している場合には、処理を終了する。また、本ステップの判定の結果が”No”、すなわち終了条件を満足していない場合には、S104に戻る。
このような処理を行うことによって、上記(*)、(**)のような、位置情報が付与された情報の自然なグルーピングを行うことができる。情報の利用者の同時刻での情報へのアクセスのしやすさに基づいて情報をグルーピングするため、情報の利用者に対して情報を効率よく伝えることができる。
600 センサ
700 グルーピング装置
702 測位部
704 関連性算出部
706 物体データ記憶部
708 類似度算出部
710 分類部
700 グルーピング装置
702 測位部
704 関連性算出部
706 物体データ記憶部
708 類似度算出部
710 分類部
Claims (11)
- 第1の時刻と第2の時刻の間の複数の時刻において、空間に配置された複数の物体の各々に付与された情報の各々と、前記空間内を移動する移動体の間の相関の強さを前記複数の物体の各々に付された前記情報の各々に対する関連性のレベルとして算出する関連性算出部と、
前記複数の時刻において算出された前記複数の物体の各々に付された前記情報の各々に対する前記関連性のレベルから、前記複数の物体の各々に付与された前記情報のうちの2つの情報をペアにすることで得られる複数のペアの各々のペアとなった情報間の類似度を前記複数の時刻において算出して前記複数のペアごとに積算し、前記複数のペアごとに積算類似度を算出する類似度算出部と、
前記複数のペアごとの前記積算類似度に基づいて前記複数の情報をグルーピングする分類部と、
を含むグルーピング装置。 - さらに、
前記複数の物体と、前記複数の物体が配置される前記空間に存在し、前記移動体の移動の障害となる障害物の配置に関する情報を格納する物体データ記憶部を含み、
前記関連性算出部は、前記複数の物体の各々に付された情報の各々と、前記空間内を移動する前記移動体の間の相関の強さを、前記障害物を通らない経路で前記空間内を移動する前記移動体と前記複数の物体の各々との間の距離に基づいて算出する、請求項1に記載のグルーピング装置。 - 前記関連性算出部は、前記複数の物体の一つの位置をXk、前記移動体の位置をYとすると、単調減少関数F(x)を用いて、
- 前記関連性算出部は、前記複数の情報のうちで、Xkに位置する物体と対応する情報と、Yに位置する前記移動体の間の相関の強さを、ラプラス方程式:
- 前記関連性算出部は、前記複数の物体の各々からの前記情報の各々の提示方向と前記移動体の進行方向とに基づいて前記関連性のレベルを算出する、請求項1乃至4のいずれか一項に記載のグルーピング装置。
- 前記関連性算出部は、前記複数の物体の各々からの前記情報の各々の前記提示方向と前記移動体の前記進行方向とが180度異なる場合が最大となる関数を用いて前記関連性のレベルを算出する、請求項5に記載のグルーピング装置。
- 前記分類部は、前記積算類似度に対して互いに異なる複数の閾値を用意することによって、階層的なグルーピングを行う、請求項1乃至6のいずれか一項に記載のグルーピング装置。
- 前記類似度算出部は、前記複数の物体の各々に付与された前記情報のうちXiに位置する第1の物体の第1の情報とXjに位置する第2の物体の第2の情報の類似度C(i、j)を、Xiに位置する前記第1の物体の前記第1の情報とYに位置する前記移動体の間の関連性riと、Xjに位置する前記第2の物体の前記第2の情報とYに位置する前記移動体の間の関連性rjを用いて、
(C1)C(i、j)=C(j、i)、すなわち添え字iとjの入れ替えに関して対称、
(C2)前記関連性ri、前記関連性rjのいずれかが0の場合、C(i、j)=0、
(C3)前記関連性riおよび前記関連性rjの値が高く、かつ前記関連性riと前記関連性rjの差が少ないほど高い値となる、
関数を用いて算出する、請求項1乃至7のいずれか一項に記載のグルーピング装置。 - 第1の時刻と第2の時刻の間の複数の時刻において、複数の物体が配置された空間内を移動する移動体の位置を計測するセンサと、
前記複数の物体の各々に付与された情報の各々と、前記空間内を移動する前記移動体の間の相関の強さを前記複数の物体の各々に付された前記情報の各々に対する関連性のレベルとして算出する関連性算出部と、
前記複数の時刻において算出された前記複数の物体の各々に付された前記情報の各々に対する前記関連性のレベルから、前記複数の物体の各々に付与された前記情報のうちの2つの情報をペアにすることで得られる複数のペアの各々のペアとなった情報間の類似度を前記複数の時刻において算出して前記複数のペアごとに積算し、前記複数のペアごとに積算類似度を算出する類似度算出部と、
前記複数のペアごとの前記積算類似度に基づいて前記複数の情報をグルーピングする分類部と、
を含むグルーピングシステム。 - コンピュータによって処理されるグルーピング方法であって、
第1の時刻と第2の時刻の間の複数の時刻において、空間に配置された複数の物体の各々に付された情報の各々と、前記空間内を移動する移動体の間の相関の強さを前記複数の物体の各々に付された前記情報の各々に対する関連性のレベルとして算出することと、
前記複数の時刻において算出された前記複数の物体の各々に付された前記情報の各々に対する前記関連性のレベルから、前記複数の物体の各々に付与された前記情報のうちの2つの情報をペアにすることで得られる複数のペアの各々のペアとなった情報間の類似度を前記複数の時刻において算出して前記複数のペアごとに積算し、前記複数のペアごとに積算類似度を算出することと、
前記複数のペアごとの前記積算類似度に基づいて前記複数の情報をグルーピングすることと、
を含むグルーピング方法。 - 第1の時刻と第2の時刻の間の複数の時刻において、空間に配置された複数の物体の各々に付された情報の各々と、前記空間内を移動する移動体の間の相関の強さを前記複数の物体の各々に付された前記情報の各々に対する関連性のレベルとして算出し、
前記複数の時刻において算出された前記複数の物体の各々に付された前記情報の各々に対する前記関連性のレベルから、前記複数の物体の各々に付与された前記情報のうちの2つの情報をペアにすることで得られる複数のペアの各々のペアとなった情報間の類似度を前記複数の時刻において算出して前記複数のペアごとに積算し、前記複数のペアごとに積算類似度を算出し、
前記複数のペアごとの前記積算類似度に基づいて前記複数の情報をグルーピングする、
処理をコンピュータに実行させるプログラム。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2013/063378 WO2014184862A1 (ja) | 2013-05-14 | 2013-05-14 | グルーピング装置、グルーピング方法、およびグルーピングプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2014184862A1 JPWO2014184862A1 (ja) | 2017-02-23 |
| JP6090438B2 true JP6090438B2 (ja) | 2017-03-08 |
Family
ID=51897883
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015516785A Expired - Fee Related JP6090438B2 (ja) | 2013-05-14 | 2013-05-14 | グルーピング装置、グルーピング方法、およびグルーピングプログラム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20160048576A1 (ja) |
| EP (1) | EP2998879B1 (ja) |
| JP (1) | JP6090438B2 (ja) |
| WO (1) | WO2014184862A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11157521B2 (en) * | 2016-06-29 | 2021-10-26 | Getac Technology Corporation | Correlating multiple sources |
| KR102888858B1 (ko) | 2020-12-23 | 2025-11-21 | 삼성전자주식회사 | 전자 장치 및 전자 장치에서 외부 장치들을 공간별로 그룹핑 하는 방법 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5917248A (en) * | 1995-01-31 | 1999-06-29 | Denso Corporation | System and method for driving electric vehicle |
| WO2006104033A1 (ja) * | 2005-03-28 | 2006-10-05 | Kyushu Institute Of Technology | 動作検出装置及び動作検出方法 |
| JP2009260583A (ja) * | 2008-04-16 | 2009-11-05 | Nec Corp | 携帯電話機情報視覚化装置、携帯電話機情報視覚化システム及びそれらに用いる携帯電話機情報視覚化方法 |
| JP5243896B2 (ja) * | 2008-09-16 | 2013-07-24 | 株式会社ゼンリンデータコム | 情報表示システム、情報表示方法、および、コンピュータプログラム |
| JP2011134225A (ja) * | 2009-12-25 | 2011-07-07 | Denso Corp | 車両用情報提供システム |
| JP5202605B2 (ja) | 2010-11-11 | 2013-06-05 | 株式会社バッファロー | コンテンツデータ管理装置、コンテンツデータ管理システム、コンテンツデータ管理プログラム、コンテンツデータ管理方法 |
| US8886128B2 (en) * | 2010-12-10 | 2014-11-11 | Verizon Patent And Licensing Inc. | Method and system for providing proximity-relationship group creation |
| US9432805B2 (en) * | 2011-09-28 | 2016-08-30 | Qualcomm Incorporated | Discovering and automatically sizing a place of relevance |
-
2013
- 2013-05-14 EP EP13884565.6A patent/EP2998879B1/en not_active Not-in-force
- 2013-05-14 WO PCT/JP2013/063378 patent/WO2014184862A1/ja not_active Ceased
- 2013-05-14 JP JP2015516785A patent/JP6090438B2/ja not_active Expired - Fee Related
-
2015
- 2015-10-27 US US14/924,093 patent/US20160048576A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| WO2014184862A1 (ja) | 2014-11-20 |
| EP2998879A1 (en) | 2016-03-23 |
| JPWO2014184862A1 (ja) | 2017-02-23 |
| EP2998879B1 (en) | 2017-11-01 |
| EP2998879A4 (en) | 2016-03-30 |
| US20160048576A1 (en) | 2016-02-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7214873B2 (ja) | 自律型車両のセンサデータリポジトリの検索 | |
| JP6888484B2 (ja) | 検索プログラム、検索方法、及び、検索プログラムが動作する情報処理装置 | |
| Rahman et al. | Notice of violation of IEEE publication principles: Recent advances in 3D object detection in the era of deep neural networks: A survey | |
| KR102338560B1 (ko) | 장치 위치 측정을 위한 다중 동기화 통합 모델 | |
| Pokorny et al. | Topological trajectory classification with filtrations of simplicial complexes and persistent homology | |
| JP2023052116A (ja) | ボクセルベースのグランド平面推定及びオブジェクト区分化 | |
| Shi et al. | Semantic geometric modelling of unstructured indoor point cloud | |
| JP4411393B2 (ja) | 解析システム | |
| Zhang et al. | Research on 3D architectural scenes construction technology based on augmented reality | |
| Singh et al. | Semantically guided geo-location and modeling in urban environments | |
| CN115311645A (zh) | 交通灯标注方法、装置、计算机设备和存储介质 | |
| JP6090438B2 (ja) | グルーピング装置、グルーピング方法、およびグルーピングプログラム | |
| Hou et al. | Sensing urban physical environment with geoai and street-level imagery | |
| JP2015106228A (ja) | データ探索装置、データ探索装置の制御方法およびデータ探索装置の制御プログラム | |
| Wakamiya et al. | Crowd-sourced cartography: Measuring socio-cognitive distance for urban areas based on crowd's movement | |
| Thompson Sargoni et al. | Neighbourhood-level pedestrian navigation using the construal level theory | |
| Ren et al. | Inserting virtual pedestrians into pedestrian groups video with behavior consistency | |
| Jalalian et al. | Architectural evaluation of simulated pedestrian spatial behaviour | |
| Gonçalves et al. | St–trajvis: Interacting with trajectory data | |
| Kim et al. | Moving phenomenon: Aggregation and analysis of geotime-tagged contents on the web | |
| US10929860B2 (en) | Viewed location metric generation and engagement attribution within an AR or VR environment | |
| Cao et al. | Trajectory-based method for dividing lanes of vehicle trajectories collected by roadside LiDAR | |
| JP5839720B2 (ja) | 軌跡データ解析装置、軌跡データ解析方法及びプログラム | |
| Raees et al. | RUN: rational ubiquitous navigation, a model for automated navigation and searching in virtual environments | |
| Niu et al. | A hand-drawn map-based navigation method for mobile robots using objectness measure |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161021 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170110 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170123 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6090438 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |