JP6075835B2 - 距離情報取得装置、撮像装置、距離情報取得方法、及び、プログラム - Google Patents
距離情報取得装置、撮像装置、距離情報取得方法、及び、プログラム Download PDFInfo
- Publication number
- JP6075835B2 JP6075835B2 JP2012186678A JP2012186678A JP6075835B2 JP 6075835 B2 JP6075835 B2 JP 6075835B2 JP 2012186678 A JP2012186678 A JP 2012186678A JP 2012186678 A JP2012186678 A JP 2012186678A JP 6075835 B2 JP6075835 B2 JP 6075835B2
- Authority
- JP
- Japan
- Prior art keywords
- distance information
- correlation value
- images
- frequency
- distance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
- H04N13/207—Image signal generators using stereoscopic image cameras using a single two-dimensional [2D] image sensor
- H04N13/211—Image signal generators using stereoscopic image cameras using a single two-dimensional [2D] image sensor using temporal multiplexing
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/55—Depth or shape recovery from multiple images
- G06T7/571—Depth or shape recovery from multiple images from focus
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
- H04N13/207—Image signal generators using stereoscopic image cameras using a single two-dimensional [2D] image sensor
- H04N13/236—Image signal generators using stereoscopic image cameras using a single two-dimensional [2D] image sensor using varifocal lenses or mirrors
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20048—Transform domain processing
- G06T2207/20056—Discrete and fast Fourier transform, [DFT, FFT]
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Studio Devices (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Measurement Of Optical Distance (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
Description
また、特許文献2には、異なる撮影パラメータで撮影したぼけの異なる複数の画像から処理対象領域内の画素毎に画素単位のぼけの相関値を算出して、被写体までの距離情報を取得する装置が開示されている。
このような問題を鑑み、特許文献2に開示の方法では、ぼけの相関値に画素単位の重み係数を設定し、重み係数に基づいてぼけの相関値の加重平均をとることで、取得される距離情報の精度を高めている。しかしながら、ぼけによって画像の輝度や色度が変化するため、画素単位の重み係数を最適に設定することは難しく、被写体の空間周波数に依存した相関値の変動を良好に抑制することは困難であった。そのため、高精度の距離情報を取得することが困難であった。
異なる撮影パラメータで被写体を撮影して得られるぼけの異なる2枚の実空間画像を用いて、前記被写体までの距離を表す距離情報を取得する距離情報取得装置であって、
実空間を周波数空間に変換する処理により、前記2枚の実空間画像を、2枚の周波数空間画像に変換する変換手段と、
前記2枚の周波数空間画像のそれぞれから、その周波数空間画像の振幅を揃えることにより、周波数空間位相画像を生成する生成手段と、
前記2枚の周波数空間画像から生成された2枚の周波数空間位相画像を用いて、前記2枚の周波数空間位相画像間の周波数毎の相関値を表す周波数空間相関値情報を算出する算出手段と、
周波数空間を実空間に逆変換する処理により、前記周波数空間相関値情報を実空間相関値情報に変換する逆変換手段と、
前記実空間相関値情報のピークの特徴に基づいて、前記被写体までの距離を表す距離情報を取得する取得手段と、
を有することを特徴とする。
異なる撮影パラメータで被写体を撮影して得られるぼけの異なる2枚の実空間画像を用いて、前記被写体までの距離を表す距離情報を取得する距離情報取得方法であって、
コンピュータが、実空間を周波数空間に変換する処理により、前記2枚の実空間画像を、2枚の周波数空間画像に変換するステップと、
コンピュータが、前記2枚の周波数空間画像のそれぞれから、その周波数空間画像の振幅を揃えることにより、周波数空間位相画像を生成するステップと、
コンピュータが、前記2枚の周波数空間画像から生成された2枚の周波数空間位相画像を用いて、前記2枚の周波数空間位相画像間の周波数毎の相関値を表す周波数空間相関値情報を算出するステップと、
コンピュータが、周波数空間を実空間に逆変換する処理により、前記周波数空間相関値情報を実空間相関値情報に変換するステップと、
コンピュータが、前記実空間相関値情報のピークの特徴に基づいて、前記被写体までの距離を表す距離情報を取得するステップと、
を有することを特徴とする。
以下、本発明の実施例1に係る距離情報取得装置、撮像装置、距離情報取得方法、及び、プログラムについて図面を参照しながら説明する。
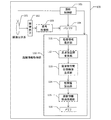
図1に、本実施例に係る撮像装置100の構成の一例を示す。撮像装置100は、撮像光学系101、撮像素子102、信号処理部103、バッファ104、撮影制御部105、距離情報取得部110などを有する。距離情報取得部110は、処理領域選択部111、周波数空間変換部112、周波数空間位相画像生成部113、相関値算出部114、距離情報取得処理部115、メモリ116などを有する。
なお、距離情報取得部110(距離情報取得装置)は、撮像装置100とは別体の装置であってもよい。距離情報取得部110の各機能部(例えば、処理領域選択部111、周波数空間変換部112、周波数空間位相画像生成部113、相関値算出部114、距離情報取得処理部115)は、例えば、コンピュータ(CPU)がメモリに記憶されたプログラムを実行することにより実現される。
撮像素子102は、単板式の撮像素子や三板式の撮像素子である。撮像素子102が単板式の撮像素子である場合、カラーフィルタはベイヤー配列のRGBカラーフィルタや補色フィルタである。
なお、上述した全ての信号処理を行う必要はない。被写体までの距離を表す距離情報の取得に必要な処理のみが行われてもよい。よって、バッファ104に蓄積する画像は、デモザイク前の画像でもよいし、デモザイク後のRGB画像でもよい。バッファ104に蓄積する画像は、YUV画像でもよい。バッファ104に蓄積する画像は、輝度のみの画像でもよい。ただし、信号処理部103が行う信号処理は、撮像光学系101によるぼけ方が変化しないような信号処理であるのがよく、特に距離情報に影響を及ぼすノイズを補正する信号処理であるのがよい。
また、距離情報取得用の画像とは別に、通常の撮像装置で得られるような画像(例えば、か観賞用の画像)を、通常の画像処理により生成し、不図示のメモリ等に保存してもよい。
なお、本実施例では、2枚の画像を用いて距離情報を取得する例を説明するが、距離情報の取得に用いる画像の数は2枚に限らない。例えば、異なる撮影パラメータで撮影したぼけの異なる3枚以上の画像を用いて、距離情報が取得されてもよい。
画像を用いて、被写体までの距離を表す距離情報を取得する。本実施例では、距離情報として、ピント位置からの距離に応じて変化する距離スコアを取得する。距離スコアは、被写体がピント位置近傍にある場合に高い値となり、被写体がピント位置から遠く離れた位置にある場合に低い値となる。
また、距離情報取得部110は、距離情報として、実際の距離を算出してもよい。実際の距離は、例えば、撮像光学系のパラメータを基に、距離スコアから算出することができる。実際の距離を算出するための撮像光学系のパラメータは、焦点距離、F値、フォーカシングレンズの位置などである。
撮影パラメータを変えて撮影が行われ、バッファ104に2枚の実空間画像が蓄積されると、その2枚の実空間画像が距離情報取得部110に送られ、距離情報取得処理が開始される。上記2枚の実空間画像を、実空間画像I1,I2と記載する。
05)。本実施例では、周波数空間画像の振幅が当該振幅で除算される。それにより、周波数空間画像の振幅が「1」に揃えられる。本実施例では、周波数空間画像F1から周波数空間位相画像FP1が生成され、周波数空間画像F2から周波数空間位相画像FP2が生成される。
本処理により振幅が「1」に揃えられると輝度情報が削除され、位相情報のみが残る。この位相画像を実空間上で表したものが実空間位相画像であり、それは輪郭を良く表す。実空間位相画像を周波数空間上で表したものが周波数空間位相画像である。
なお、周波数相関値情報の算出と、周波数相関値情報から実空間相関値情報への変換とは、互いに異なる機能部により実現されてもよい。
そして、距離情報取得処理部115は、取得した距離情報をメモリ116に格納する(S108)。
最大値算出ステップS1151にて位相画像相関値情報PCCの最大値が算出(検出)される。この位相画像相関値情報PCCの最大値は、被写体までの距離(例えば、ピント位置から被写体までの距離;デフォーカス量)と関係があり、この関係に基づいて距離情報が取得される。被写体がピント位置にあるときに位相画像相関値情報PCCの最大値は「1」となり、被写体がピント位置から離れるほど最大値は「0」に近づく。最大値が「1」のときにのみ被写体がピント位置(ピント面)にあると判断してもよいし、最大値が「1」近傍の値であるときに被写体がピント位置にあると判断してもよい。最大値が「0」のときにのみ被写体がピント位置から無限遠の位置にあると判断してもよいし、閾値を設定し、最大値が閾値以下のときに被写体がピント位置から無限遠の位置にあると判断してもよいし、「無限遠の位置」ではなく「遠方の位置」と判断してもよい。
位相画像相関値情報PCCのピークの特徴(具体的には位相画像相関値情報PCCの最大値)と、距離情報との対応関係を予め計算し、当該対応関係を表す対応情報(距離補正テーブル)を予め用意しておいてもよい。そのような距離補正テーブルを予めメモリ等に格納しておき、距離情報を取得する際に距離補正テーブルを用いることで、より正確な距離情報を取得することができる。
距離情報取得ステップS1152では、位相画像相関値情報PCCの最大値(ピークの特徴)と、予め用意された距離補正テーブルとに基づいて、被写体までの正確な距離が取得される。
図4を用いて本実施例のDFD法による距離情報取得処理の原理を説明する。
(1/Do)+(1/Di)=(1/FL) ・・・(式1)
しかし、式1によって距離を求めることができるのは、通常、撮像面上に結像した物体に限定される。
具体的には、位相画像相関値情報PCCからデフォーカス量Def1を求め、デフォーカス量Def1から算出対象物体OBJ1の像距離Di1を求めることで、撮像面に結像しない物体についての物体距離Do1を算出することができる。
図5(A)〜図5(F)にぼけ量BK1と位相画像相関値情報PCCの関係の例を示す。
本実施例では、暗いF値(F/8)と明るいF値(F/4)とで2枚の実空間画像を撮影し、それらの実空間画像から得られた位相画像相関値情報PCCを用いて距離情報を求める。
暗いF値(F/8)で撮影した場合は、ピント位置から背景(もしくは前景)の全域に
渡ってピントが合っているパンフォーカス画像が得られる。
一方、明るいF値(F/4)で撮影した場合は、背景(もしくは前景)がぼけた画像が
得られる。
今回、距離情報取得処理に用いる2枚の実空間画像(選択領域画像)として、101画素×101画素のランダムパターン画像(元画像)と、元画像に対してガウシャンフィルタを掛けてぼかした画像(比較画像)とを用意した。
元画像は、画像全域に渡りランダムパターンがシャープに表示された画像であり、暗いF値(F/8)で撮影して得られるパンフォーカス画像を想定したものである。
比較画像は、ガウシャンフィルタを掛けてランダムパターンをぼかした画像であり、明るいF値(F/4)で撮影して得られる画像(背景(もしくは前景)がぼけた画像)を想
定したものである。
被写体がピント位置にある場合、被写体がぼけることなく撮影される。そのため、F値が異なっていても、2枚の実空間画像はほぼ同一となり、位相画像相関値情報の最大値は「1」もしくは「1近傍の値」となる。
図5(A)は元画像と比較画像とが同じ場合(σ=0.1の場合)の位相画像相関値情報のグラフを示す。
位相画像相関値情報PCCのグラフは画像の中央部(Y=51)で最大となる。図5(
A)では、位相画像相関値情報PCCの最大値は「1」である。このように、元画像と比較画像とが同じ画像の場合、位相画像相関値情報PCCの最大値は「1」となる。これは画像中の各周波数成分の相関値が「1」で揃っており、高周波成分の細かな点まで一致していることを示す。
この場合、明るいF値で撮影した画像(比較画像)では被写体がぼけるが、暗いF値で撮影したパンフォーカス画像(元画像)では被写体はぼけない。
画像がぼけるとエッジ部の傾斜が緩やかになり高周波成分(コントラスト)が低下する。
実空間位相画像は、画像中のエッジ部(輪郭部)を表現したものであり、周波数空間位相画像を用いてエッジ部の僅かな変化を敏感に検出することができる。具体的には、エッジ部の変化は周波数空間における高周波成分の位相の変化として現れる。2枚の実空間画像のぼけが全く同じ場合には、高周波成分は位相が少しでもずれると相関を有さなくなるが、本実施例では、ぼけの異なる2枚の実空間画像を用いるため、高周波成分は位相が少しずれた場合でも相関を有するようになる。これが、元画像と比較画像との周波数空間位相画像から得られる位相画像相関値情報PCCの最大値の低下となって現れる。
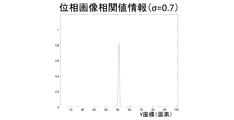
図5(B)は、元画像と、標準偏差σ=0.7のガウシャンフィルタを掛けた比較画像とから得られる位相画像相関値情報のグラフを示す。
図5(B)では、位相画像相関値情報PCCの最大値は「0.8287」であり、比較画像がぼけることによって位相画像相関値情報PCCの最大値が低下したことが分かる。
図5(C)は、元画像と、標準偏差σ=1.0のガウシャンフィルタを掛けた比較画像とから得られる位相画像相関値情報のグラフを示す。このときの位相画像相関値情報PCCの最大値は「0.5627」である。このように、比較画像が図5(B)よりも大きくぼけている場合には、位相画像相関値情報PCCの最大値がさらに低下する。
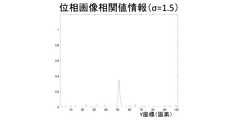
図5(D)は、元画像と、標準偏差σ=1.5のガウシャンフィルタを掛けた比較画像とから得られる位相画像相関値情報のグラフを示す。このときの位相画像相関値情報PCCの最大値は「0.3514」である。
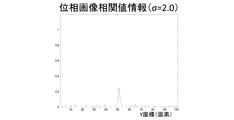
図5(E)は、元画像と、標準偏差σ=2.0のガウシャンフィルタを掛けた比較画像とから得られる位相画像相関値情報のグラフを示す。このときの位相画像相関値情報PCCの最大値は「0.2513」である。
図5(F)は、元画像と、標準偏差σ=3.0のガウシャンフィルタを掛けた比較画像とから得られる位相画像相関値情報のグラフを示す。このときの位相画像相関値情報PCCの最大値は「0.1536」である。

このように、ぼけの大きさに関連して位相画像相関値情報PCCの最大値が変化しており、これらの関係から、被写体のデフォーカス量、像距離を求め、物体距離を算出することができる。
また、実空間画像がぼけると周囲の輝度が平均化されるので、明るい点の輝度が低下したり暗い点の輝度が明るくなったりと輝度の変化を引き起こす。色度に関しても同様で、実空間画像がぼけると周囲の色が混ざり合い色度の変化が生じる。
これに対して、本実施例では輝度や色度の情報を排除した位相画像を用いているので、被写体依存性を低減させ、特に輝度や色度に対してロバストな距離情報を取得することが可能となる。
DFD法を用いた距離情報の取得ではぼけの異なる2枚の画像が必要だが、2枚の画像を撮影するためには撮影を2回行う必要がある。2回の撮影には時間差があり、その間に被写体が移動したり撮影者や撮像装置が移動したりすることによって、2枚の画像間に位置ずれが生じてしまうことがある。
そして、DFD法では2枚の画像の実質的に同じ位置の領域を処理領域として選択する必要があるが、画像の位置ずれが生じた場合は実質的に異なる位置の領域を処理領域として選択することとなり、正しい距離情報を取得できないことが問題となっていた。
本実施例のように周波数空間位相画像間の相関(周波数空間相関値情報)を取り、周波数空間相関値情報を実空間相関値情報に変換した場合、画像の位置ずれは実空間相関値情報の位置ずれに表れるが、実空間相関値情報の最大値にはあまり大きな影響を与えない。よって、本実施例では、2枚の画像に位置ずれが生じた場合でも高精度な距離情報を取得することができるメリットもある。つまり、本実施例によれば、画像間の位置ずれに対してもロバストで、常に高精度な距離情報を取得することができる。
しかし、本実施例によれば、被写体までの距離を表す距離情報に対する、画像の輝度や色度、及び、画像間の位置のずれの影響を低減することができるため、より確実に(常に安定して)高精度な距離情報を取得することができる。
なお、本実施例では、距離情報の取得のために2枚の実空間画像を撮影する例を示したが、3枚以上の実空間画像を撮影し、撮影した3枚以上の実空間画像のうちの2枚の実空
間画像を用いて、距離情報が取得されてもよい。
実施例2に係る距離情報取得装置の構成は実施例1と同様であるが、実施例2と実施例1とでは距離情報取得部での距離情報の取得方法が異なる。具体的には、本実施例では、距離情報取得処理部は、位相画像相関値情報PCCのピークの幅に基づいて距離情報を取得する。
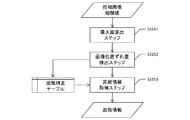
最大値算出ステップS2151にて位相画像相関値情報PCCの最大値が算出される。
そして、閾値算出ステップS2152にて幅算出用の閾値が算出される。本実施例では、位相画像相関値情報PCCの最大値に所定の比率(割合)を乗算することにより閾値が算出される。本実施例では、上記所定の比率を30%とするが、比率は、50%、35%(1/e)、20%、13.5%(1/e2)などでも良い。閾値を低く設定すると位相画像相関値情報PCCの変化を精度良く検出することができるので、ピント位置近傍の距離情報として正確な距離情報を取得したい場合に有効である。一方、閾値を高く設定すると物体がピント位置から遠く離れて大きくぼけた画像となった場合でもノイズの影響を受け難くすることができるので、広範囲な距離情報を取得したい場合に有効である。
次に、交点算出ステップS2153にて位相画像相関値情報PCCが閾値と交差する点が算出される。その交点は少なくとも2つあり、場合によっては3つ以上存在する。ここでは、位相画像相関値情報PCCのピークにおける2つの交点が算出される。
そして、ピーク幅算出ステップS2154にて上記2つの交点の間隔が、上記幅として算出される。即ち、本実施例では、位相画像相関値情報PCCのピークの幅として、当該ピークにおいて実空間相関値情報の値が閾値と等しくなる2点間の幅が算出される。位相画像相関値情報PCCのピークの幅は、画像のぼけの大きさに関係があり距離情報の元データとして利用できる。
距離情報取得ステップS2155では、位相画像相関値情報PCCのピークの幅と、距離補正テーブル(位相画像相関値PCCのピークの幅と、距離情報との対応関係を表すテーブル)とを用いて、距離情報(被写体までの距離)が取得される。
このように、位相画像相関値情報PCCのピークの幅は画像のぼけの大きさと関係がある。したがって、位相画像相関値情報PCCのピークの幅から、被写体の物体距離を算出することができる。
そして、本実施例のように周波数空間位相画像間の相関(周波数空間相関値情報)を取
り、実空間相関値情報に変換した場合、画像の位置ずれは実空間相関値情報の座標のずれに表れるが、位相画像相関値情報のピークの幅にはあまり大きな影響を与えない。よって、本実施例では、2枚の画像に位置ずれが生じた場合でも高精度な距離情報を取得することができるメリットがある。つまり、本実施例によれば、画像間の位置ずれに対してもロバストで、常に正確な距離情報を取得することができる。
図7では最大値算出ステップS2151の後に正規化ステップS2156を加えている。
正規化ステップS2156では位相画像相関値情報の値が最大値で正規化される。換言すれば、位相画像相関値情報の各値が最大値で除算される。それにより、位相画像相関値情報が、最大値が「1」となるように、正規化される。位相画像相関値情報を正規化することにより、閾値が常に一定となる。そのため、閾値を予め用意することができ、閾値を算出する必要がなくなる。
交点算出ステップ2153では、予め用意された閾値を用いて、図6と同様に、2つの交点が算出される。具体的には、正規化後の位相画像相関値情報と、閾値との交点が算出される。その後、図6と同様に、ピーク幅算出ステップS2154と距離情報取得ステップS2155が行われる。即ち、正規化後の実空間相関値情報のピークの幅に基づいて、距離情報が取得される。
実施例3に係る距離情報取得装置の構成は実施例1と同様であるが、実施例3と実施例1とでは距離情報取得部での距離情報の取得方法が異なる。本実施例では、距離情報の取得に用いる2枚の実空間画像間に位置ずれが生じた場合においても高精度な距離算出を実現する構成について説明する。具体的には、本実施例では、位相画像相関値情報から、距離情報の取得に用いる2枚の実空間画像の間の被写体位置のずれ量が算出され、位相画像相関値情報のピークの特徴と、算出したずれ量とに基づいて、距離情報が取得される。それにより、2枚の実空間画像間に位置ずれが生じた場合においても高精度な距離情報の取得を実現することができる。
実施例1と同様に最大値算出ステップS3151にて位相画像相関値情報PCCの最大値が算出される。
次に、画像位置ずれ量検出ステップS3152にて2枚の実空間画像間の位置のずれ量が算出(検出)される。本実施例のように周波数空間位相画像間の相関値(周波数空間相関値情報)を取り、周波数空間相関値情報を実空間相関値情報に変換した場合、画像の位置ずれは実空間相関値情報の位置ずれに表れる。そこで、実空間相関値情報を用いることにより、撮影した2枚の実空間画像間の位置のずれ量を検出することができる。
本実施例では、位相画像相関値情報が最大となる位置の、中心位置からのずれ量を検出しており、撮影した2枚の実空間画像の位置のずれ量をサブピクセルの精度で正確に検出することができる。
そして、距離情報取得ステップS3153にて、上記算出(検出)したずれ量と、距離補正テーブル(ピークの最大値と距離情報の対応関係を表すテーブル)を用いて、距離情報が取得される。例えば、ずれ量毎に距離補正テーブルが予め用意されていてもよい。その場合には、算出したずれ量に対応する距離補正テーブルを用いて、実施例1と同様の方法により、距離情報を取得することができる。また、ずれ量に応じて、距離補正テーブル、または、距離補正テーブルを用いて得られた距離情報が補正されてもよい。
なお、本実施例では、位相画像相関値情報のピークの最大値を用いて距離情報を取得したが、これに限らない。実施例2のように、位相画像相関値情報のピークの幅を用いて距離情報が取得されてもよい。
111 処理領域選択部
112 周波数空間変換部
113 周波数空間位相画像生成部
114 相関値算出部
115 距離情報取得処理部
Claims (14)
- 異なる撮影パラメータで被写体を撮影して得られるぼけの異なる2枚の実空間画像を用いて、前記被写体までの距離を表す距離情報を取得する距離情報取得装置であって、
実空間を周波数空間に変換する処理により、前記2枚の実空間画像を、2枚の周波数空間画像に変換する変換手段と、
前記2枚の周波数空間画像のそれぞれから、その周波数空間画像の振幅を揃えることにより、周波数空間位相画像を生成する生成手段と、
前記2枚の周波数空間画像から生成された2枚の周波数空間位相画像を用いて、前記2枚の周波数空間位相画像間の周波数毎の相関値を表す周波数空間相関値情報を算出する算出手段と、
周波数空間を実空間に逆変換する処理により、前記周波数空間相関値情報を実空間相関値情報に変換する逆変換手段と、
前記実空間相関値情報のピークの特徴に基づいて、前記被写体までの距離を表す距離情報を取得する取得手段と、
を有することを特徴とする距離情報取得装置。 - 前記取得手段は、前記ピークの最大値に基づいて距離情報を取得する
ことを特徴とする請求項1に記載の距離情報取得装置。 - 前記取得手段は、前記ピークの幅に基づいて距離情報を取得する
ことを特徴とする請求項1に記載の距離情報取得装置。 - 前記幅は、前記ピークにおいて前記実空間相関値情報の値が閾値と等しくなる2点間の幅である
ことを特徴とする請求項3に記載の距離情報取得装置。 - 前記取得手段は、前記実空間相関値情報の値を最大値で正規化し、正規化後の実空間相関値情報のピークの幅に基づいて距離情報を取得する
ことを特徴とする請求項3または4に記載の距離情報取得装置。 - 実空間相関値情報のピークの特徴と、距離情報との対応関係を表す対応情報が予め用意されており、
前記取得手段は、前記逆変換手段により得られた前記実空間相関値情報の前記ピークの特徴と、前記対応情報とに基づいて、距離情報を取得する
ことを特徴とする請求項1〜5のいずれか1項に記載の距離情報取得装置。 - 前記取得手段は、
前記逆変換手段により得られた実空間相関値情報から、距離情報の取得に用いる前記2枚の実空間画像の間の被写体位置のずれ量を算出し、
前記逆変換手段により得られた前記実空間相関値情報の前記ピークの特徴と、算出した前記ずれ量とに基づいて、距離情報を取得する
ことを特徴とする請求項1〜6のいずれか1項に記載の距離情報取得装置。 - 前記周波数空間相関値情報は、高周波数領域の周波数毎の相関値を表す
ことを特徴とする請求項1〜7のいずれか1項に記載の距離情報取得装置。 - 実空間を周波数空間に変換する前記処理は、二次元フーリエ変換である
ことを特徴とする請求項1〜8のいずれか1項に記載の距離情報取得装置。 - 周波数空間を実空間に逆変換する前記処理は、二次元逆フーリエ変換である
ことを特徴とする請求項1〜9のいずれか1項に記載の距離情報取得装置。 - 前記生成手段は、前記周波数空間画像の振幅を当該振幅で除算することにより、前記周波数空間画像の振幅を揃える
ことを特徴とする請求項1〜10のいずれか1項に記載の距離情報取得装置。 - 請求項1〜11のいずれか1項に記載の距離情報取得装置を有する
ことを特徴とする撮像装置。 - 異なる撮影パラメータで被写体を撮影して得られるぼけの異なる2枚の実空間画像を用いて、前記被写体までの距離を表す距離情報を取得する距離情報取得方法であって、
コンピュータが、実空間を周波数空間に変換する処理により、前記2枚の実空間画像を、2枚の周波数空間画像に変換するステップと、
コンピュータが、前記2枚の周波数空間画像のそれぞれから、その周波数空間画像の振幅を揃えることにより、周波数空間位相画像を生成するステップと、
コンピュータが、前記2枚の周波数空間画像から生成された2枚の周波数空間位相画像を用いて、前記2枚の周波数空間位相画像間の周波数毎の相関値を表す周波数空間相関値情報を算出するステップと、
コンピュータが、周波数空間を実空間に逆変換する処理により、前記周波数空間相関値情報を実空間相関値情報に変換するステップと、
コンピュータが、前記実空間相関値情報のピークの特徴に基づいて、前記被写体までの距離を表す距離情報を取得するステップと、
を有することを特徴とする距離情報取得方法。 - 請求項13に記載の距離情報取得方法の各ステップをコンピュータに実行させるためのプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012186678A JP6075835B2 (ja) | 2012-08-27 | 2012-08-27 | 距離情報取得装置、撮像装置、距離情報取得方法、及び、プログラム |
| US13/966,443 US9661302B2 (en) | 2012-08-27 | 2013-08-14 | Depth information acquisition apparatus, imaging apparatus, depth information acquisition method and program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012186678A JP6075835B2 (ja) | 2012-08-27 | 2012-08-27 | 距離情報取得装置、撮像装置、距離情報取得方法、及び、プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014044117A JP2014044117A (ja) | 2014-03-13 |
| JP6075835B2 true JP6075835B2 (ja) | 2017-02-08 |
Family
ID=50147637
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012186678A Expired - Fee Related JP6075835B2 (ja) | 2012-08-27 | 2012-08-27 | 距離情報取得装置、撮像装置、距離情報取得方法、及び、プログラム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9661302B2 (ja) |
| JP (1) | JP6075835B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6362068B2 (ja) * | 2014-02-17 | 2018-07-25 | キヤノン株式会社 | 距離計測装置、撮像装置、距離計測方法、およびプログラム |
| WO2015128908A1 (ja) * | 2014-02-26 | 2015-09-03 | パナソニックIpマネジメント株式会社 | 深さ位置検出装置、撮像素子、及び深さ位置検出方法 |
| CN109543609B (zh) * | 2018-11-22 | 2022-04-12 | 四川长虹电器股份有限公司 | 检测倒车距离的方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4965840A (en) | 1987-11-27 | 1990-10-23 | State University Of New York | Method and apparatus for determining the distances between surface-patches of a three-dimensional spatial scene and a camera system |
| JP4403477B2 (ja) * | 2000-01-26 | 2010-01-27 | ソニー株式会社 | 画像処理装置及び画像処理方法 |
| JP4990234B2 (ja) | 2008-07-07 | 2012-08-01 | オリンパス株式会社 | 測距装置、測距方法、測距プログラム又は撮像装置 |
| JP5832424B2 (ja) * | 2010-11-17 | 2015-12-16 | パナソニック株式会社 | 撮像装置及び距離計測方法 |
-
2012
- 2012-08-27 JP JP2012186678A patent/JP6075835B2/ja not_active Expired - Fee Related
-
2013
- 2013-08-14 US US13/966,443 patent/US9661302B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20140055577A1 (en) | 2014-02-27 |
| JP2014044117A (ja) | 2014-03-13 |
| US9661302B2 (en) | 2017-05-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5484631B2 (ja) | 撮像装置、撮像方法、プログラム、及びプログラム記憶媒体 | |
| CN102550010B (zh) | 具有两种工作模式的图像捕捉系统和方法 | |
| JP6271990B2 (ja) | 画像処理装置、画像処理方法 | |
| US9251589B2 (en) | Depth measurement apparatus, image pickup apparatus, and depth measurement program | |
| JP5709911B2 (ja) | 画像処理方法、画像処理装置、画像処理プログラムおよび撮像装置 | |
| KR101424923B1 (ko) | 화상 합성 장치 및 화상 합성용 컴퓨터 프로그램 | |
| JP5374119B2 (ja) | 距離情報取得装置、撮像装置、及びプログラム | |
| US20180182075A1 (en) | Image processing apparatus, image capturing apparatus, method of image processing, and storage medium | |
| US9843711B2 (en) | Image processing device, image processing method, and image processing program | |
| WO2010071001A1 (en) | Image processing apparatus and image processing method | |
| WO2011096157A1 (ja) | 撮像装置および撮像方法、ならびに前記撮像装置のための画像処理方法 | |
| JP2015148532A (ja) | 距離計測装置、撮像装置、距離計測方法、およびプログラム | |
| JP6300670B2 (ja) | 焦点調節装置、焦点調節方法およびプログラム、並びに撮像装置 | |
| JP6555990B2 (ja) | 距離計測装置、撮像装置、および距離計測方法 | |
| JP6075835B2 (ja) | 距離情報取得装置、撮像装置、距離情報取得方法、及び、プログラム | |
| JP2017049947A (ja) | 画像処理装置および画像処理方法 | |
| JP5369729B2 (ja) | 画像処理装置、撮像装置およびプログラム | |
| JP4947576B2 (ja) | 撮像装置、ぶれ補正方法及び撮像方法 | |
| JP6486453B2 (ja) | 画像処理装置、画像処理方法、プログラム | |
| JP6436840B2 (ja) | 画像処理装置、撮像装置、画像処理方法、画像処理プログラム、および、記憶媒体 | |
| JP5209137B2 (ja) | 撮像装置 | |
| JP2015109681A (ja) | 画像処理方法、画像処理装置、画像処理プログラムおよび撮像装置 | |
| JP6637242B2 (ja) | 画像処理装置、撮像装置、プログラム、および画像処理方法 | |
| JP6238673B2 (ja) | 画像処理装置、撮像装置、撮像システム、画像処理方法、画像処理プログラム、および、記憶媒体 | |
| JP6604737B2 (ja) | 画像処理装置、撮像装置、画像処理方法、画像処理プログラム、および、記憶媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150805 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160517 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160701 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161213 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170106 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6075835 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |