JP6053436B2 - Detection apparatus, computer program, and detection method - Google Patents
Detection apparatus, computer program, and detection method Download PDFInfo
- Publication number
- JP6053436B2 JP6053436B2 JP2012220975A JP2012220975A JP6053436B2 JP 6053436 B2 JP6053436 B2 JP 6053436B2 JP 2012220975 A JP2012220975 A JP 2012220975A JP 2012220975 A JP2012220975 A JP 2012220975A JP 6053436 B2 JP6053436 B2 JP 6053436B2
- Authority
- JP
- Japan
- Prior art keywords
- acceleration
- unit
- signal
- target
- assumed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

Landscapes
- Radar Systems Or Details Thereof (AREA)
Description
この発明は、目標を検出する検出装置に関する。 The present invention relates to a detection device that detects a target.
電磁波を放射し、放射した電磁波が目標に当たって反射した反射波を受信することにより目標を検出する装置がある。
反射波(目標信号)が微弱でノイズに埋もれている場合でも目標を検出するため、所定の期間(信号処理周期、SPI)で受信した信号を高速フーリエ変換などでコヒーレント積分して信号を積み上げる方式がある。
しかし、目標の速度が変化している場合、ドップラー効果により反射波の周波数が変化する。
そこで、SPIを目標の速度がほぼ一定であるとみなせる短い期間(コヒーレント処理周期、CPI)に分割し、それぞれのCPIで受信した信号をコヒーレント積分し、コヒーレント積分した信号をインコヒーレント積分する検出後積分(PDI)方式がある。
また、コヒーレント積分した信号の周波数をシフトしてインコヒーレント積分するシフトPDI方式がある。
There is an apparatus for detecting a target by radiating an electromagnetic wave and receiving a reflected wave reflected by the radiated electromagnetic wave hitting the target.
In order to detect the target even when the reflected wave (target signal) is weak and buried in noise, the signal received in a predetermined period (signal processing cycle, SPI) is coherently integrated by fast Fourier transform, etc. There is.
However, when the target speed changes, the frequency of the reflected wave changes due to the Doppler effect.
Therefore, after detection, the SPI is divided into short periods (coherent processing period, CPI) in which the target speed can be regarded as almost constant, the signals received at each CPI are coherently integrated, and the coherently integrated signal is incoherently integrated. There is an integration (PDI) method.
There is also a shift PDI method in which the frequency of a coherently integrated signal is shifted to incoherently integrate.
PDI方式は、CPI間の反射波の位相のずれを無視して積分するので、目標の速度の変化が小さい場合に有効である。しかし、目標の速度の変化が大きい場合、CPI間で信号を積分することができず、目標を検出できない。
シフトPDI方式は、コヒーレント積分した信号の周波数をCPI間でシフトして積分するので、PDI方式よりも、目標の速度の変化が大きい場合でも、CPI間で信号を積分することができる。しかし、CPI内における目標の速度の変化が無視できないほど大きい場合、コヒーレント積分で信号雑音比を改善できない。CPI内における目標の速度の変化を無視できるほどCPIを短くすると、コヒーレント積分する反射波が少なくなり、信号雑音比を改善できない。このため、コヒーレント積分した信号の周波数をシフトしてインコヒーレント積分しても、目標を検出できない。
The PDI method is effective when the change in the target speed is small because the phase difference of the reflected wave between the CPIs is neglected for integration. However, if the change in the target speed is large, the signal cannot be integrated between the CPIs, and the target cannot be detected.
In the shift PDI method, since the frequency of the coherently integrated signal is shifted and integrated between the CPIs, the signal can be integrated between the CPIs even when the change in the target speed is larger than in the PDI method. However, when the change in the target speed in the CPI is so large that it cannot be ignored, the signal-to-noise ratio cannot be improved by coherent integration. If the CPI is shortened so that the change in the target speed in the CPI can be ignored, the reflected waves to be coherently integrated are reduced, and the signal-to-noise ratio cannot be improved. For this reason, the target cannot be detected even if the frequency of the coherently integrated signal is shifted and incoherently integrated.
この発明は、例えば、PDI方式やシフトPDI方式では目標を検出できないほど目標の速度の変化が大きい場合でも、目標を検出することを目的とする。 For example, an object of the present invention is to detect a target even when a change in target speed is so large that the target cannot be detected by the PDI method or the shift PDI method.
この発明にかかる検出装置は、
放射した電磁波が目標に当たって反射した反射波を受信した信号強度に基づいて、上記目標を検出する検出装置において、
加速度仮定部と、補償量算出部と、補償部と、フーリエ変換部と、加速度推定部と、検出部とを有し、
上記加速度仮定部は、上記目標の加速度を複数仮定し、
上記補償量算出部は、上記加速度仮定部が仮定した加速度それぞれについて、上記反射波の位相を補償するための信号補償量を算出し、
上記補償部は、上記加速度仮定部が仮定した加速度それぞれについて、上記反射波の位相を上記信号補償量で補償し、
上記フーリエ変換部は、上記加速度仮定部が仮定した加速度それぞれについて、上記補償部が位相を補償した反射波の信号強度をフーリエ変換し、
上記加速度推定部は、上記フーリエ変換部がフーリエ変換した信号強度に基づいて、上記加速度仮定部が仮定した加速度から、上記目標の加速度を推定し、
上記検出部は、上記加速度推定部が推定した加速度について、上記フーリエ変換部がフーリエ変換した信号強度に基づいて、上記目標を検出することを特徴とする。
The detection device according to the present invention includes:
In the detection device for detecting the target based on the signal intensity received by the reflected wave reflected by the radiated electromagnetic wave hitting the target,
An acceleration assumption unit, a compensation amount calculation unit, a compensation unit, a Fourier transform unit, an acceleration estimation unit, and a detection unit;
The acceleration assumption unit assumes a plurality of target accelerations,
The compensation amount calculation unit calculates a signal compensation amount for compensating the phase of the reflected wave for each acceleration assumed by the acceleration assumption unit,
The compensation unit compensates the phase of the reflected wave with the signal compensation amount for each acceleration assumed by the acceleration assumption unit,
The Fourier transform unit, for each acceleration assumed by the acceleration assumption unit, Fourier transform the signal intensity of the reflected wave compensated for the phase by the compensation unit,
The acceleration estimation unit estimates the target acceleration from the acceleration assumed by the acceleration assumption unit based on the signal intensity Fourier-transformed by the Fourier transformation unit,
The detection unit detects the target with respect to the acceleration estimated by the acceleration estimation unit, based on the signal intensity Fourier-transformed by the Fourier transform unit.
この発明にかかる検出装置によれば、PDI方式やシフトPDI方式では目標を検出できないほど目標の速度の変化が大きい場合でも、目標を検出することができる。 According to the detection apparatus of the present invention, even when the change in the target speed is so large that the target cannot be detected by the PDI method or the shift PDI method, the target can be detected.
実施の形態1.
実施の形態1について、図1〜図12を用いて説明する。
Embodiment 1 FIG.
The first embodiment will be described with reference to FIGS.
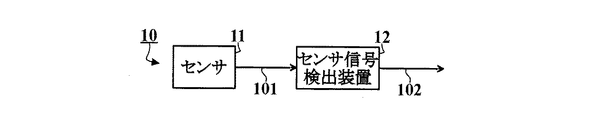
図1は、この実施の形態におけるセンサ信号検出システム10の全体構成の一例を示す図である。 FIG. 1 is a diagram illustrating an example of the overall configuration of a sensor signal detection system 10 according to this embodiment.
センサ信号検出システム10(速度測定システム)は、センサ11と、センサ信号検出装置12とを有する。
センサ11は、目標を観測し、観測信号101を出力する。センサ11は、例えば、高パルス繰り返し周波数(HPRF)ドップラーレーダやその他のレーダである。
センサ信号検出装置12(速度測定装置)は、観測信号101を解析して目標を検出し、信号検出情報102を出力する。
The sensor signal detection system 10 (speed measurement system) includes a sensor 11 and a sensor
The sensor 11 observes the target and outputs an
The sensor signal detection device 12 (speed measurement device) analyzes the
センサ11(放射部・受信部)は、例えば、所定のパルス繰り返し周期(PRI)Δtでパルス状の電磁波を放射し、放射した電磁波が目標に当たって反射した反射波を受信する。センサ11が出力する観測信号101は、受信した反射波の信号強度を表わす。
The sensor 11 (radiating unit / receiving unit), for example, emits a pulsed electromagnetic wave at a predetermined pulse repetition period (PRI) Δt, and receives the reflected wave reflected by the radiated electromagnetic wave hitting the target. The
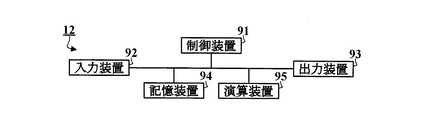
図2は、この実施の形態におけるセンサ信号検出装置12のハードウェア資源の一例を示す図である。
FIG. 2 is a diagram illustrating an example of hardware resources of the sensor
センサ信号検出装置12は、例えば、コンピュータである。センサ信号検出装置12は、制御装置91と、入力装置92と、出力装置93と、記憶装置94と、演算装置95とを有する。
制御装置91は、記憶装置94が記憶したコンピュータプログラムを実行することにより、コンピュータ全体を制御する。
演算装置95は、算術演算や論理演算の演算をする。演算装置95は、記憶装置94が記憶したデータなどを使って演算をし、演算結果を表わすデータを生成する。演算装置95が生成したデータは、例えば、記憶装置94が記憶する。
記憶装置94は、制御装置91が実行するコンピュータプログラムや、演算装置95が演算に用いるデータなどを記憶する。記憶装置94は、例えば、揮発性メモリや不揮発性メモリなどの内部記憶装置、磁気ディスク装置や光学ディスク装置などの外部記憶装置などである。
入力装置92は、コンピュータの外部から情報を入力し、データに変換する。入力装置92が変換したデータは、例えば、記憶装置94が記憶し、あるいは、演算装置95が演算に用いる。入力装置92は、例えば、マウスやキーボードなどの操作入力装置、カメラやスキャナなどの画像入力装置、マイクなどの音声入力装置、温度センサや圧力センサなどの物理量測定装置、他の装置が送信した信号を受信する受信装置などである。
出力装置93は、記憶装置94が記憶したデータや演算装置95が生成したデータを変換してコンピュータの外部へ出力する。出力装置93は、例えば、文字や画像を表示する表示装置、スピーカなどの音声出力装置、文字や画像を印刷する印刷装置、他の装置に対して信号を送信する送信装置などである。
The sensor
The
The
The
The
The
以下に説明するセンサ信号検出装置12の機能ブロックは、例えば、記憶装置94が記憶したコンピュータプログラムを制御装置91が実行し、入力装置92や出力装置93や記憶装置94や演算装置95を制御することにより実現される。しかし、これらの機能ブロックは、他の電気的構成や機械的構成など他の構成によって実現されるものであってもよい。
In the functional block of the sensor
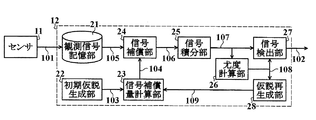
図3は、この実施の形態におけるセンサ信号検出装置12の機能ブロック構成の一例を示す図である。
FIG. 3 is a diagram showing an example of a functional block configuration of the sensor
センサ信号検出装置12は、例えば、観測信号記憶部21と、初期仮説生成部22と、信号補償量計算部23と、信号補償部24と、信号積分部25と、尤度計算部26と、信号検出部27と、仮説再生成部28とを有する。
The sensor
観測信号記憶部21は、センサ11が出力した観測信号101をパルスK個分蓄積する。Kは、2以上の整数であり、パルスヒット数(サンプリング数)を表わす。PRI(サンプリング周期)をΔtとすると、観測時間は、K×Δtである。 The observation signal storage unit 21 accumulates K observation signals 101 output from the sensor 11 for K pulses. K is an integer of 2 or more, and represents the number of pulse hits (sampling number). When PRI (sampling period) is Δt, the observation time is K × Δt.
初期仮説生成部22(加速度仮定部)は、仮説群103を生成する。仮説群103は、例えばN個の仮説からなる。Nは、2以上の整数である。仮説は、目標の運動モデルを仮定したものである。例えば、目標が等加速度運動をしていることを前提とし、あらかじめ定めた目標の加速度が取り得る範囲の最小値amin及び最大値amaxに基づいて、初期仮説生成部22は、最小値amin以上最大値amax以下の実数のなかから、N個の加速度an(nは、1以上N以下の整数。)を選択する。初期仮説生成部22は、例えば、一様ランダムに、N個の加速度anを選択する。あるいは、初期仮説生成部22は、等間隔に、N個の加速度anを選択する構成であってもよい。
The initial hypothesis generation unit 22 (acceleration assumption unit) generates a
信号補償量計算部23(補償量算出部)は、初期仮説生成部22が生成した仮説群103(あるいは、後述する仮説再生成部28が生成した仮説群109)に基づいて、信号補償量104を計算する。信号補償量104は、観測時間K×Δtの間に目標が運動することによる観測信号101の周波数や位相のずれを補償するものである。信号補償量104は、目標の運動モデルによって変化する。このため、信号補償量計算部23は、仮説群103(あるいは仮説群109)に含まれるN個の仮説それぞれについて、信号補償量104を算出する。信号補償量計算部23は、N個の信号補償量104を算出する。
The signal compensation amount calculation unit 23 (compensation amount calculation unit) is based on the
信号補償部24(補償部)は、観測信号記憶部21が記憶した観測信号列105(パルスK個分の観測信号101)を、信号補償量計算部23が算出した信号補償量104で補償して、補償済観測信号列106を生成する。信号補償部24は、仮説群103(あるいは仮説群109)に含まれるN個の仮説それぞれについて、信号補償量計算部23が算出した信号補償量104を用いて、補償済観測信号列106を生成する。信号補償部24は、N個の補償済観測信号列106を生成する。
The signal compensation unit 24 (compensation unit) compensates the observation signal sequence 105 (observation signals 101 for K pulses) stored in the observation signal storage unit 21 with the signal compensation amount 104 calculated by the signal compensation
信号積分部25(フーリエ変換部)は、信号補償部24が生成した補償済観測信号列106を積分して、積分済観測信号列107を生成する。信号積分部25は、例えば、補償済観測信号列106を高速フーリエ変換(FFT)によりコヒーレント積分する。信号積分部25は、仮説群103(あるいは仮説群109)に含まれるN個の仮説それぞれについて、信号補償部24が生成した補償済観測信号列106を用いて、積分済観測信号列107を生成する。信号積分部25は、N個の積分済観測信号列107を生成する。
実際の目標の運動に仮説が合致していれば、目標の運動による観測信号101のずれが消えるので、積分済観測信号列107の信号雑音比(SNR)が高くなる。
The signal integration unit 25 (Fourier transform unit) integrates the compensated
If the hypothesis matches the actual target motion, the deviation of the
尤度計算部26(尤度算出部)は、信号積分部25が生成した積分済観測信号列107の信号雑音比SNR(積分SN比)を算出する。尤度計算部26は、例えば、積分済観測信号列107の振幅最大値Snと、振幅最大値Sn以外の信号の振幅平均値Nnとを算出する。尤度計算部26は、振幅最大値Snを振幅平均値Nnで割った商を算出して、信号雑音比SNRとする。尤度計算部26は、仮説群103(あるいは仮説群109)に含まれるN個の仮説それぞれについて、信号積分部25が生成した積分済観測信号列107を用いて、信号雑音比SNRを算出する。尤度計算部26は、N個の信号雑音比SNRを算出する。
尤度計算部26は、算出した信号雑音比SNRに基づいて、尤度wnを算出する。尤度wnは、仮説の確からしさ(もっともらしさ)を表わす。実際の目標の運動に仮説が合致していれば信号雑音比SNRが高くなるので、信号雑音比SNRが高い仮説ほど、もっともらしいと言える。例えば、尤度計算部26は、所定の理想信号雑音比SNRref(理想積分SN比)を信号雑音比SNRから差し引いた差を算出し、算出した差を理想信号雑音比SNRrefで割った商を算出し、算出した商でネイピア数を累乗した冪を算出して、尤度wnとする。尤度計算部26は、仮説群103(あるいは仮説群109)に含まれるN個の仮説それぞれについて、尤度wnを算出する。尤度計算部26は、N個の尤度wnを算出する。尤度計算部26は、算出したN個の尤度wnを表わす尤度情報108を出力する。
The likelihood calculation unit 26 (likelihood calculation unit) calculates a signal noise ratio SNR (integral SN ratio) of the integrated
信号検出部27(加速度推定部、検出部)は、尤度計算部26が算出した尤度wnのうちの最大値が所定の閾値より大きい場合に、その尤度wnに対応する仮説を採用する。信号検出部27は、採用した仮説について、信号積分部25が生成した積分済観測信号列107に基づいて、目標を検出する。信号検出部27は、例えば、目標の速度や加速度を算出する。信号検出部27は、検出した結果を表わす信号検出情報102を出力する。
Signal detection unit 27 (acceleration estimating unit, detection unit), when the maximum value of the likelihood w n to the
仮説再生成部28(加速度仮定部)は、尤度計算部26が算出した尤度wnのうちの最大値が閾値より小さい場合に、新たな仮説群109を生成する。仮説群109は、例えばN個の仮説からなる。例えば、仮説再生成部28は、最小値amin以上最大値amax以下の実数のなかから、N個の加速度an(nは、1以上N以下の整数。)を選択する。
仮説再生成部28は、尤度計算部26が算出した尤度wnが高い仮説に近い仮説を重点的に選択する。
例えば、仮説再生成部28は、前回のN個の仮説のなかから、尤度wnが高い順にM個(Mは、1以上N未満の整数。)の仮説を抽出する。仮説再生成部28は、抽出したM個の仮説について尤度計算部26が算出した尤度wnを合計した合計値Σwを算出する。仮説再生成部28は、選択したM個の仮説それぞれの尤度wnを、算出した合計値Σwで割った商(正規化尤度)を算出して、算出した商を、その仮説を選択する確率(発生確率)とし、M個の仮説のなかから、重複ありでN個の仮説を選択する。仮説再生成部28は、選択したN個の仮説それぞれに揺らぎを付与して、新たなN個の仮説を生成する。例えば、揺らぎとして加速度に付与する値の最大値をΔa(ただし、Δa>0。)とすると、仮説再生成部28は、−Δa以上Δa以下の実数(ただし、0は除く。)のなかから、実数Δnを選択する。仮説再生成部28は、例えば、一様ランダムに実数Δnを選択する。仮説再生成部28は、選択した仮説における加速度に、選択した実数Δnを加算した和を算出し、算出した和を、新しい仮説における加速度anとする。ただし、仮説再生成部28は、算出した和が最小値aminより小さい場合、最小値aminを、新しい仮説における加速度anとし、算出した和が最大値amaxより大きい場合、最大値amaxを、新しい仮説における加速度anとする。
Hypothesis regenerating unit 28 (acceleration assuming unit), when the maximum value of the likelihood w n to the
For example, the
仮説再生成部28が生成した仮説群109に基づいて、信号補償量計算部23が信号補償量104を算出し、信号補償部24が補償済観測信号列106を生成し、信号積分部25が積分済観測信号列107を生成し、尤度計算部26が尤度wnを算出する。尤度wnの最大値が閾値以上になれば、信号検出部27が信号検出情報102を出力する。
Based on the
尤度wnの最大値が閾値未満である場合、仮説再生成部28は、仮説群109を生成した回数を上限回数と比較する。仮説群109を生成した回数が上限回数Lより小さい場合、仮説再生成部28は、更に新しい仮説群109を生成する。
If the maximum value of the likelihood w n is less than the threshold, the
仮説群109を生成した回数が上限回数Lに達した場合、仮説再生成部28は、新しい仮説群109を生成しない。信号検出部27は、仮説群103及びL個の仮説群109に含まれるN×(L+1)個の仮説のなかから、尤度計算部26が算出した尤度wnが最大である仮説を採用する。信号検出部27は、採用した仮説について、信号積分部25が生成した積分済観測信号列107に基づいて、目標を検出し、検出した結果を表わす信号検出情報102を出力する。
When the number of generations of the
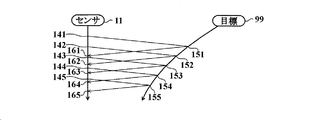
図4は、この実施の形態におけるセンサ11が放射した電磁波と、目標99に当たって反射した反射波との関係の一例を示す図である。
FIG. 4 is a diagram illustrating an example of the relationship between the electromagnetic wave radiated by the sensor 11 and the reflected wave reflected by the
縦方向は、時間の流れを示す。横方向は、センサ11と目標99との間の距離を示す。
The vertical direction shows the flow of time. The horizontal direction indicates the distance between the sensor 11 and the
センサ11は、所定のパルス繰り返し周期で、パルス状の電磁波を繰り返し放射する。目標99は、所定の加速度で等加速度運動をしている。
The sensor 11 repeatedly emits pulsed electromagnetic waves at a predetermined pulse repetition period. The
時刻141にセンサ11が放射した電磁波は、反射位置151で目標99に当たって反射し、時刻161に反射波をセンサ11が受信する。
時刻142にセンサ11が放射した電磁波は、反射位置152で目標99に当たって反射し、時刻162に反射波をセンサ11が受信する。
時刻143にセンサ11が放射した電磁波は、反射位置153で目標99に当たって反射し、時刻163に反射波をセンサ11が受信する。
時刻144にセンサ11が放射した電磁波は、反射位置154で目標99に当たって反射し、時刻164に反射波をセンサ11が受信する。
時刻145にセンサ11が放射した電磁波は、反射位置155で目標99に当たって反射し、時刻165に反射波をセンサ11が受信する。
The electromagnetic wave radiated from the sensor 11 at
The electromagnetic wave radiated from the sensor 11 at the
The electromagnetic wave radiated from the sensor 11 at the
The electromagnetic wave radiated from the sensor 11 at the
The electromagnetic wave radiated by the sensor 11 at
センサ11が電磁波を放射する間隔は一定だが、反射位置151〜155が異なるので、センサ11が反射波を受信する間隔は一定ではない。
また、目標99が移動しているので、ドップラー効果により、センサ11が受信する反射波の周波数は、センサ11が放射した電磁波の周波数と異なる。この例では、目標99がセンサ11に近づく方向に移動しているので、反射波の周波数は、放射波の周波数より高くなる。
Although the interval at which the sensor 11 radiates electromagnetic waves is constant, the reflection positions 151 to 155 are different, so the interval at which the sensor 11 receives the reflected wave is not constant.
Moreover, since the
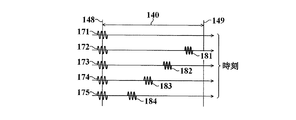
図5は、この実施の形態におけるセンサ11が放射した電磁波と、目標99に当たって反射した反射波との関係の一例を示す図である。
FIG. 5 is a diagram showing an example of the relationship between the electromagnetic wave radiated by the sensor 11 and the reflected wave reflected by the
横軸は、時刻を表わす。横軸が複数あるのは、パルス繰り返し周期140で折り返して表示しているためである。横軸と線148との交点は、一つ上の横軸と線149との交点と同時刻を表わす。
The horizontal axis represents time. The reason why there are a plurality of horizontal axes is that the display is folded and displayed at the
電磁波171は、時刻141(図4参照。)にセンサ11が放射した電磁波である。反射波181は、反射位置151で電磁波171が目標99に反射して、時刻161にセンサ11が受信した反射波である。
電磁波172は、時刻142にセンサ11が放射した電磁波である。反射波182は、反射位置152で電磁波172が目標99に反射して、時刻162にセンサ11が受信した反射波である。
電磁波173は、時刻143にセンサ11が放射した電磁波である。反射波183は、反射位置153で電磁波173が目標99に反射して、時刻163にセンサ11が受信した反射波である。
電磁波174は、時刻144にセンサ11が放射した電磁波である。反射波184は、反射位置154で電磁波174が目標99に反射して、時刻164にセンサ11が受信した反射波である。
The
The electromagnetic wave 172 is an electromagnetic wave emitted by the sensor 11 at
The
The
なお、実際には、反射波181〜184は微弱なので、ノイズに埋もれてしまい、この図のようにはっきりと識別することはできない。
Actually, since the reflected
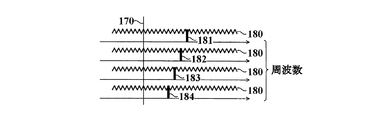
図6は、この実施の形態におけるセンサ11が受信した信号強度の一例を周波数領域で示す図である。 FIG. 6 is a diagram illustrating an example of the signal intensity received by the sensor 11 in this embodiment in the frequency domain.
横軸は、周波数を示す。
一番上は、反射波181を含むパルス繰り返し周期140における信号強度を表わす。
二番目は、反射波182を含むパルス繰り返し周期140における信号強度を表わす。
三番目は、反射波183を含むパルス繰り返し周期140における信号強度を表わす。
四番目は、反射波184を含むパルス繰り返し周期140における信号強度を表わす。
The horizontal axis indicates the frequency.
The top represents the signal intensity in the
The second represents the signal intensity in the
The third represents the signal intensity in the
The fourth represents the signal intensity in the
この例では、目標99がセンサ11に近づく方向へ移動しているので、反射波181〜184の周波数は、センサ11が放射した電磁波の周波数170より高くなる。
また、この例では、目標99が減速しているので、反射波181の周波数よりも反射波182の周波数のほうが低く、反射波182の周波数よりも反射波183の周波数のほうが低く、反射波183の周波数よりも反射波184の周波数のほうが低くなる。
なお、反射波181〜184は微弱なので、周波数領域でも、ノイズ180に埋もれて、はっきりと識別することはできない。
In this example, since the
In this example, since the
Since the reflected
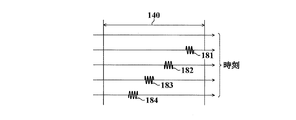
図7は、この実施の形態における信号補償部24が生成した補償済観測信号列106の一例を示す図である。
FIG. 7 is a diagram illustrating an example of the compensated
横軸は、図5と同様に、時刻を示す。 The horizontal axis indicates time as in FIG.
観測信号を補償することにより、反射波181〜184(及び、図示を省略しているノイズ)の周波数及び位相が変化する。しかし、反射波181〜184がノイズに埋もれていることは変わらない。
Compensating the observation signal changes the frequency and phase of the reflected
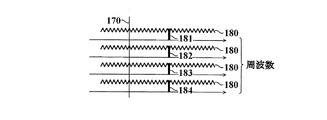
図8は、この実施の形態における信号補償部24が生成した補償済観測信号列106が表わす信号強度の一例を周波数領域で示す図である。
FIG. 8 is a diagram showing an example of the signal strength represented by the compensated
横軸は、周波数を示す。
一番上は、反射波181を含むパルス繰り返し周期140における信号強度を表わす。
二番目は、反射波182を含むパルス繰り返し周期140における信号強度を表わす。
三番目は、反射波183を含むパルス繰り返し周期140における信号強度を表わす。
四番目は、反射波184を含むパルス繰り返し周期140における信号強度を表わす。
The horizontal axis indicates the frequency.
The top represents the signal intensity in the
The second represents the signal intensity in the
The third represents the signal intensity in the
The fourth represents the signal intensity in the
目標99が等加速度運動をしていて、目標99の加速度が、仮説において仮定した加速度と一致している場合、反射波181〜184の周波数及び位相が一致する。
When the
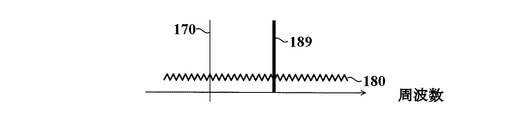
図9は、この実施の形態における信号積分部25が生成した積分済観測信号列107が表わす信号強度の一例を示す図である。
FIG. 9 is a diagram illustrating an example of the signal strength represented by the integrated
横軸は、周波数を示す。 The horizontal axis indicates the frequency.
目標99が等加速度運動をしていて、目標99の加速度が、仮説において仮定した加速度と一致しているとすると、反射波181〜184の周波数及び位相が一致するので、これを積分した反射波189の信号強度が大きくなる。ノイズ180は、位相がバラバラなので、これを積分しても信号強度は、あまり大きくならない。
これにより、反射波189をノイズ180からはっきりと識別できるようになる。
If the
As a result, the reflected
図10は、この実施の形態における積分済観測信号列107の信号雑音比190の一例を示す図である。
FIG. 10 is a diagram illustrating an example of the signal-to-
横軸は、仮説で仮定した目標99の加速度を示す。
縦軸は、積分済観測信号列107の信号雑音比を示す。
破線191は、目標99の加速度が取りうる範囲としてあらかじめ定められた範囲の最小値aminを表わす。破線192は、目標99の加速度が取りうる範囲としてあらかじめ定められた範囲の最大値amaxを表わす。
破線193は、信号検出部27が仮説を採用するか否かを判定するための尤度の閾値に対応する信号雑音比190の閾値を表わす。信号雑音比190が大きくなるほど、尤度計算部26が算出する尤度が大きくなるので、信号検出部27は、破線193が表わす閾値より信号雑音比190が大きい場合に、その仮説を採用する。
The horizontal axis indicates the acceleration of the
The vertical axis represents the signal-to-noise ratio of the integrated
A
A
最小値amin以上最大値amax以下のすべての加速度について、信号雑音比190を算出すれば、信号雑音比190が最大になる加速度を見つけることは容易だが、そのための計算量が膨大になる。
リアルタイムで目標99を検出するには、できるだけ計算量を抑える必要がある。
If the signal-to-
In order to detect the
この実施の形態におけるセンサ信号検出装置12は、仮説群103から出発して、それぞれの仮説の尤度を算出し、仮説群109を再生成することを繰り返して、尤度が閾値を超える仮説を探索する。尤度が閾値を超えれば良しとし、必ずしも尤度が最大になる仮説を探さないのは、目標99の加速度を正確に測定することよりも、少ない計算量で目標99を検出することを優先するからである。したがって、センサ信号検出装置12は、尤度が閾値を超える仮説を見つけたのち、計算量に余力があれば、更に探索を続けて、もっと尤度が大きくなる仮説を探す構成であってもよい。
The sensor
次に、信号補償量計算部23が算出する信号補償量104について、説明する。
Next, the signal compensation amount 104 calculated by the signal compensation
時刻tにおけるセンサ11と目標99との間の距離(センサ11からの目標距離)をR(t)とする。時刻tにおいて目標99に反射する電磁波をセンサ11が放射した時刻をt1、時刻tにおいて目標99に反射した反射波をセンサ11が受信する時刻をt2とすると、

これをtで微分すると、次の式が得られる。
これより、次の式が得られる。
ここで、t1をt2で表わす式のt=t0付近におけるテーラー展開を考える。
センサ11が時刻t1に放射した電磁波の強度v(t1)が、次の式で表わされるとする。
このとき、センサ11が時刻t2に受信した反射波の強度z(t2)は、次の式で表わすことができる。
そこで、信号補償量計算部23は、次の式で表わされる信号補償量zc(t2)を算出する。
信号補償部24は、反射波の強度z(t2)と、信号補償量zc(t2)との積を算出して、補償済信号強度zハット(t2)とする。
t2の3次以上の項を無視すると、定数C2は、次の式で表わされる。
そこで、信号補償部24は、次の式で表わされる信号補償量zc(t2)を算出する構成であってもよい。
なお、目標99が検出されれば、ドップラー周波数から目標99の速度がわかるので、目標99の加速度をもっと正確に知りたければ、採用した仮説における定数C2と、目標99の速度とを数19に代入して、目標99の加速度を求めればよい。
If the
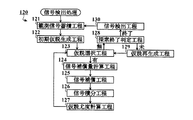
図11は、この実施の形態における信号検出処理120の流れの一例を示す図である。
FIG. 11 is a diagram showing an example of the flow of the
信号検出処理120において、センサ信号検出装置12は、センサ11が出力した観測信号101から、目標99を検出する。信号検出処理120は、例えば、観測信号蓄積工程121と、初期仮説生成工程122と、仮説選択工程123と、信号補償量計算工程124と、信号補償工程125と、信号積分工程126と、仮説尤度計算工程127と、探索終了判定工程128と、仮説再生成工程129と、信号検出工程130とを有する。センサ信号検出装置12は、信号検出処理120を、観測信号蓄積工程121から開始する。
In the
観測信号蓄積工程121において、観測信号記憶部21は、センサ11が出力した観測信号101を受信し、記憶する。観測信号記憶部21が観測時間K×Δt分の観測信号101を記憶すると、センサ信号検出装置12は、初期仮説生成工程122へ処理を進める。
In the observation
初期仮説生成工程122において、初期仮説生成部22は、N個の仮説からなる仮説群103を生成する。
In the initial
仮説選択工程123において、信号補償量計算部23は、初期仮説生成工程122で初期仮説生成部22が生成した仮説群103、または、仮説再生成工程129で仮説再生成部28が生成した仮説群109に含まれるN個の仮説のなかから、まだ処理していない仮説を選択する。
N個の仮説がすべて処理済であり、まだ処理していない仮説がない場合、信号補償量計算部23は、探索終了判定工程128へ処理を進める。
N個の仮説のなかに、まだ処理していない仮説がある場合、信号補償量計算部23は、まだ処理していない仮説のなかから、仮説を1つ選択し、信号補償量計算工程124へ処理を進める。
In the
If all of the N hypotheses have been processed and there is no hypothesis that has not yet been processed, the signal compensation
If there is a hypothesis that has not yet been processed among the N hypotheses, the signal compensation
信号補償量計算工程124において、信号補償量計算部23は、仮説選択工程123で選択した仮説に基づいて、信号補償量104を算出する。
In the signal compensation
信号補償工程125において、信号補償部24は、観測信号蓄積工程121で観測信号記憶部21が記憶した観測信号101からなる観測信号列105と、信号補償量計算工程124で信号補償量計算部23が算出した信号補償量104とに基づいて、補償済観測信号列106を算出する。
In the
信号積分工程126において、信号積分部25は、信号補償工程125で信号補償部24が算出した補償済観測信号列106に基づいて、積分済観測信号列107を算出する。
In the
仮説尤度計算工程127において、尤度計算部26は、信号積分工程126で信号積分部25が算出した積分済観測信号列107に基づいて、仮説選択工程123で信号補償量計算部23が選択した仮説の尤度を算出する。
信号補償量計算部23は、仮説選択工程123に処理を戻し、次の仮説を選択する。
In the hypothesis
The signal compensation
探索終了判定工程128において、信号検出部27は、探索を終了するか否かを判定する。例えば、信号検出部27は、仮説尤度計算工程127で尤度計算部26が算出したN個の尤度のなかの最大値が閾値より大きいか否かを判定する。
尤度の最大値が閾値より大きい場合、信号検出部27は、探索を終了すると判定し、信号検出工程130へ処理を進める。
尤度の最大値が閾値以下である場合、信号検出部27は、仮説再生成工程129を実行した回数が上限回数に達したか否かを判定する。
仮説再生成工程129を実行した回数が上限回数に達した場合、信号検出部27は、探索を終了すると判定し、信号検出工程130へ処理を進める。
仮説再生成工程129を実行した回数が上限回数未満である場合、信号検出部27は、まだ探索を終了しないと判定し、仮説再生成工程129へ処理を進める。
In the search
If the maximum likelihood value is greater than the threshold value, the
When the maximum likelihood value is less than or equal to the threshold value, the
When the number of executions of the
If the number of times the
仮説再生成工程129において、仮説再生成部28は、その時点でのN個の仮説と、それぞれの仮説について仮説尤度計算工程127で尤度計算部26が算出した尤度とに基づいて、新たなN個の仮説からなる仮説群109を生成する。
信号補償量計算部23は、仮説選択工程123に処理を戻し、新たな仮説群109のなかから仮説を選択する。
In the
The signal compensation
信号検出工程130において、信号検出部27は、仮説尤度計算工程127で尤度計算部26が算出した尤度が最も大きい仮説を採用して、目標99を検出する。
観測信号記憶部21は、観測信号蓄積工程121に処理を戻し、次の観測信号101を記憶する。
In the
The observation signal storage unit 21 returns the processing to the observation
2回目以降の初期仮説生成工程122は、観測信号記憶部21が、新しく観測時間K×Δt分の観測信号101を記憶してから実行する。すなわち、センサ信号検出装置12は、センサ11が出力した観測信号101を、観測時間K×Δtごとに区切って、それぞれを別個に処理する。
なお、2回目以降の初期仮説生成工程122は、観測信号記憶部21が、新しくパルス繰り返し周期Δt分の観測信号101を記憶してから実行する構成であってもよい。その場合、信号補償部24は、前回処理した観測信号列105に含まれる観測信号101のうち、最も古いパルス繰り返し周期Δt分の観測信号101を除く(K−1)×Δt分の観測信号101と、新たに観測信号記憶部21が記憶したΔt分の観測信号101とからなるK×Δt分の観測信号101からなる観測信号列105を処理の対象とする。
The initial
The initial
また、2回目以降の初期仮説生成工程122において、初期仮説生成部22は、前回の信号検出工程130で信号検出部27が採用した仮説に基づいて、仮説群103を生成する構成であってもよい。例えば、初期仮説生成部22は、信号検出部27が採用した仮説における加速度aに近い加速度ほど選択する確率を高くして、ランダムにN個の加速度anを選択する。
Further, in the initial
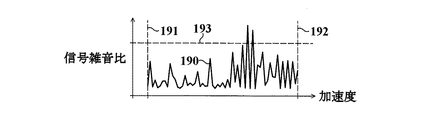
図12は、この実施の形態における信号検出処理120の具体例を示す図である。
FIG. 12 is a diagram showing a specific example of the
横軸は、仮説で仮定した目標99の加速度を示す。
縦軸は、初期仮説生成部22や仮説再生成部28がその加速度を仮説として選択する確率、または、信号積分部25が算出する積分済観測信号列107の信号雑音比を表わす。
The horizontal axis indicates the acceleration of the
The vertical axis represents the probability that the
初期仮説生成工程122において、初期仮説生成部22が加速度を選択する確率は、破線191で表わされる最小値amin以上、破線192で表わされる最大値amax以下の範囲で均等である。
ここで、矢印で表わされるN個(この例では、N=10。)の加速度(仮説)を、初期仮説生成部22が選択したものとする。
In the initial
Here, it is assumed that the initial
初期仮説生成部22が選択したN個の加速度それぞれについて、仮説選択工程123〜仮説尤度計算工程127において、信号補償量計算部23が信号補償量104を算出し、信号補償部24が補償済観測信号列106を算出し、信号積分部25が積分済観測信号列107を算出し、尤度計算部26が尤度を算出する。
算出した尤度(信号雑音比)の最大値が閾値より小さいので、探索終了判定工程128において、信号検出部27は、仮説再生成工程129へ処理を進める。
For each of the N accelerations selected by the initial
Since the maximum value of the calculated likelihood (signal-to-noise ratio) is smaller than the threshold value, the
仮説再生成工程129において、仮説再生成部28は、N個の加速度のなかから、尤度が高い順にM個(この例では、M=5。)の加速度を抽出する。仮説再生成部28は、抽出したそれぞれの加速度を中心として、−Δa以上+Δa以下の範囲を選択範囲とする。この例のように、M個の選択範囲は、互いに重なる場合がある。それぞれの選択範囲の選択確率は、中心となる加速度の尤度に比例する。それぞれの選択範囲のなかにおける加速度の選択確率は、均等である。選択範囲が重なっている場合、その範囲内の加速度の選択確率は、重なっている選択範囲それぞれにおける加速度の選択確率の合計になる。
ここで、矢印で表わされるN個の加速度を、仮説再生成部28が選択したものとする。
In the
Here, it is assumed that the
仮説再生成部28が選択したN個の加速度それぞれについて、仮説選択工程123〜仮説尤度計算工程127において、信号補償量計算部23が信号補償量104を算出し、信号補償部24が補償済観測信号列106を算出し、信号積分部25が積分済観測信号列107を算出し、尤度計算部26が尤度を算出する。
算出した尤度の最大値が閾値より小さいので、探索終了判定工程128において、信号検出部27は、再び、仮説再生成工程129へ処理を進める。
For each of the N accelerations selected by the
Since the calculated maximum likelihood value is smaller than the threshold value, in the search
仮説再生成工程129において、仮説再生成部28は、N個の加速度のなかからM個の加速度を抽出して、加速度の選択確率を定め、新たなN個の加速度を選択する。
In the
仮説再生成部28が選択したN個の加速度それぞれについて、仮説選択工程123〜仮説尤度計算工程127において、信号補償量計算部23が信号補償量104を算出し、信号補償部24が補償済観測信号列106を算出し、信号積分部25が積分済観測信号列107を算出し、尤度計算部26が尤度を算出する。
算出した尤度の最大値が閾値より大きいので、探索終了判定工程128において、信号検出部27は、再び、信号検出工程130へ処理を進める。
For each of the N accelerations selected by the
Since the calculated maximum value of the likelihood is larger than the threshold value, in the search
信号検出工程130において、信号検出部27は、尤度が最大の加速度を、目標99の推定加速度として、目標99を検出する。この例では、尤度が閾値を超えた加速度が2つあるが、信号検出部27は、尤度が大きいほうの加速度を、目標99の推定加速度とする。
In the
このように、加速度の選択確率を変えていきながら、仮説の再生成を繰り返す。この図に示したように、細かい部分で凹凸があるものの、概略として、信号雑音比が最大になる加速度に、仮定した加速度が近いほど、積分済観測信号列107の信号雑音比は、大きくなる。このため、仮説の再生成を繰り返すにつれて、信号雑音比が最大になる加速度に近い加速度ほど、選択される確率が高くなる。
これにより、少ない計算量で、積分済観測信号列107の信号雑音比が閾値を超える仮説を見つけることができ、目標を検出することができる。
In this manner, hypothesis regeneration is repeated while changing the acceleration selection probability. As shown in this figure, although there are irregularities in fine parts, as a general rule, the closer the assumed acceleration is to the acceleration at which the signal-to-noise ratio is maximized, the larger the signal-to-noise ratio of the integrated
As a result, it is possible to find a hypothesis in which the signal-to-noise ratio of the integrated
なお、目標99が加速しながら近づいてくることがあらかじめわかっている場合や、加速しながら近づいてくる目標99だけを検出できればよい場合、初期仮説生成部22や仮説再生成部28は、例えば、amin<amax=0として、仮説を生成する。
逆に、目標99が減速しながら近づいてくることがあらかじめわかっている場合や、減速しながら近づいてくる目標99だけを検出できればよい場合、初期仮説生成部22や仮説再生成部28は、例えば、amax>amin=0として、仮説を生成する。
そのような前提がなく、加速目標・減速目標のどちらも検出したい場合、初期仮説生成部22や仮説再生成部28は、例えば、amin<0<amaxとして、仮説を生成する。
If it is known in advance that the
Conversely, when it is known in advance that the
If there is no such premise and it is desired to detect both the acceleration target and the deceleration target, the initial
また、初期仮説生成部22や仮説再生成部28が生成する仮説は、目標99が等加速度運動をしていることを仮定するものでなくてもよい。例えば、初期仮説生成部22や仮説再生成部28が生成する仮説は、目標99が等加加速度運動をしていることを仮定するものであってもよい。その場合、初期仮説生成部22や仮説再生成部28は、目標99の加速度aと加加速度bとを仮定して、仮定した加速度aと加加速度bとの組を仮説とする。
Further, the hypotheses generated by the
また、信号補償量計算部23は、t2の3次以上の項を無視せずに、信号補償量104を算出する構成であってもよい。例えば、信号補償量計算部23は、t2の3次の項まで計算に入れ、t2の4次以上の項を無視して、信号補償量104を算出する。
The signal compensation
また、信号補償量計算部23は、次のようにして、信号補償量104を算出する構成であってもよい。
例えば、目標99の状態ベクトルを次の式で定義する。
For example, the state vector of the
目標99が加速度aで等加速度運動していると仮定して、kヒット目の目標99の運動モデルを次の式で定義する。
kヒット目の目標距離Rkに基づいて、ベースバンド信号のモデルを次の式で定義する。
信号補償量計算部23は、この3つの式と、仮定した加速度anとに基づいて、kヒット目の信号補償量δk,nを算出する。信号補償量δk,nは、仮定した加速度anと信号との時間的な関係から、加速度が距離及び速度に及ぼす影響をキャンセルする量である。信号補償部24は、次の式により、補償済観測信号zハットk,nを算出する。
また、尤度計算部26は、上述した算出方式で算出した信号雑音比SNRではなく、他の指標値に基づいて尤度を算出する構成であってもよい。例えば、尤度計算部26は、積分済観測信号列107の振幅最大値Snと、振幅最大値Sn以外の信号の振幅平均値Nnと、振幅最大値Sn以外の信号の振幅標準偏差σnとを算出する。尤度計算部26は、振幅最大値Snから振幅平均値Nnを差し引いた差を算出する。尤度計算部26は、算出した差を振幅標準偏差σnで割った商を算出して、信号雑音比SNRの代わりとなる指標値とする。
The
また、仮説再生成部28が、新たな仮説における加速度anを、最小値amin以上、最大値amax以下の範囲内に収める方式は、例えば、次のような方式であってもよい。
仮説再生成部28は、抽出したM個の仮説のなかから、重複ありで選択したN個の仮説それぞれにおける加速度からΔaを差し引いた差と、最小値aminとのうち大きいほうを、a’minとする。仮説再生成部28は、N個の仮説それぞれにおける加速度にΔaを加えた和と、最大値amaxとのうち小さいほうを、a’maxとする。仮説再生成部28は、a’min以上a’max以下の実数のなかから、ランダムに実数を選択して、新たな仮説における加速度anとする。
Moreover, the
The
また、仮説再生成部28が、仮説に付加する揺らぎは、所定の範囲内から、一様な確率で選択するものでなくてもよい。例えば、仮説再生成部28は、絶対値が小さい実数ほど選択確率を高く、絶対値が大きい実数ほど選択確率を低くして、選択したN個の仮説それぞれにおける加速度に加える実数を、ランダムに選択する。例えば、−Δa超0未満の範囲の実数aについては、Δa+aに比例する選択確率とし、0超Δa未満の範囲の実数aについては、Δa−aに比例する選択確率とする。例えば、仮説再生成部28は、0以上Δa2未満の実数のなかから、一様ランダムに実数を選択し、選択した実数の平方根を算出し、算出した平方根をΔaから差し引いた差を算出する。仮説再生成部28は、−1または1の2つの整数のなかから、一様ランダムに整数を選択し、選択した整数を、算出した差に乗じた積を算出して、加速度に加える実数とする。
Further, the fluctuation added to the hypothesis by the
なお、積分済観測信号列107の信号雑音比が閾値を超える仮説を見つけるための方式は、遺伝的アルゴリズムなど、他の最適化方式であってもよい。
Note that the method for finding a hypothesis in which the signal-to-noise ratio of the integrated
また、信号検出部27は、積分SN比の理想積分SN比に対する相対誤差が所定の閾値以下となった場合に、探索を終了すると判定する構成であってもよい。
Further, the
また、信号検出部27が出力する信号検出情報102は、信号積分結果、採用した加速度an、積分SN比などを含む構成であってもよい。
The
この実施の形態におけるセンサ信号検出装置(12)は、センサ(11)において微弱な目標信号を検出する。
センサ信号検出装置は、観測信号蓄積部(観測信号記憶部21)と、初期仮説生成部(22)と、信号補償量計算部(23)と、信号補償部(24)と、信号積分部(25)と、尤度計算部(26)と、信号検出部(27)と、仮説再生成部(28)とを有する。
前記観測信号蓄積部は、複数サンプリング分の観測信号(101)を蓄積する。
前記初期仮説生成部は、仮定した目標運動パラメータ(加速度)の候補(仮説)を複数生成する。
前記信号補償量計算部は、前記目標運動パラメータと前記観測信号との時間的な関係から、前記観測信号に対する信号補償量(104)を前記仮説ごとに計算する。
前記信号補償部は、前記仮説ごとに、前記信号補償量に基づいて、前記観測信号蓄積部が蓄積した観測信号列(105)を補償済観測信号列(106)に変換する。
前記信号積分部は、前記仮説ごとに、前記補償済観測信号列を積分済観測信号列(107)に変換する。
前記尤度計算部は、前記仮説ごとに、前記積分済観測信号列に基づいて、理想値に対する信号積分効果を表す尤度を計算する。
前記信号検出部は、前記仮説ごとの尤度の計算結果に基づいて、前記目標運動パラメータの探索が終了したかどうかを判断するとともに、探索終了と判断した場合、前記仮説ごとの尤度の計算結果に基づいて、信号積分結果を出力する。
前記仮説再生成部は、前記信号検出部において探索未了と判断した場合、前記仮説ごとの尤度の計算結果に基づいて,前記仮説を再生成する。
The sensor signal detection device (12) in this embodiment detects a weak target signal in the sensor (11).
The sensor signal detection apparatus includes an observation signal accumulation unit (observation signal storage unit 21), an initial hypothesis generation unit (22), a signal compensation amount calculation unit (23), a signal compensation unit (24), and a signal integration unit ( 25), a likelihood calculating unit (26), a signal detecting unit (27), and a hypothesis regenerating unit (28).
The observation signal accumulating unit accumulates a plurality of sampling observation signals (101).
The initial hypothesis generation unit generates a plurality of hypothesized target motion parameter (acceleration) candidates (hypotheses).
The signal compensation amount calculation unit calculates a signal compensation amount (104) for the observation signal for each hypothesis from the temporal relationship between the target motion parameter and the observation signal.
For each hypothesis, the signal compensation unit converts the observation signal sequence (105) accumulated by the observation signal accumulation unit into a compensated observation signal sequence (106) based on the signal compensation amount.
The signal integration unit converts the compensated observation signal sequence into an integrated observation signal sequence (107) for each hypothesis.
The likelihood calculation unit calculates a likelihood representing a signal integration effect with respect to an ideal value based on the integrated observation signal sequence for each hypothesis.
The signal detection unit determines whether or not the search for the target motion parameter is completed based on the calculation result of the likelihood for each hypothesis, and calculates the likelihood for each hypothesis when it is determined that the search is ended. Based on the result, the signal integration result is output.
When the signal detection unit determines that the search has not been completed, the hypothesis regenerating unit regenerates the hypothesis based on the likelihood calculation result for each hypothesis.
前記初期仮説生成部(22)は、前記仮説を、所定の探索範囲内の一様乱数を用いて生成する。 The initial hypothesis generator (22) generates the hypothesis using uniform random numbers within a predetermined search range.
前記初期仮説生成部(22)は、前記仮説を、所定の探索範囲内を等間隔に分割して生成する。 The initial hypothesis generation unit (22) generates the hypothesis by dividing a predetermined search range at equal intervals.
前記尤度計算部(26)は、前記積分済観測信号列(107)の振幅最大値と、最大値以外の振幅平均値及び標準偏差に基づいて前記尤度を計算する。 The likelihood calculation unit (26) calculates the likelihood based on the maximum amplitude value of the integrated observation signal sequence (107), the average amplitude value other than the maximum value, and the standard deviation.
前記信号検出部(27)は、前記尤度の最大値が所定の閾値以上となったとき、または、探索回数が所定の上限値に達したとき、探索終了と判断する。 The signal detection unit (27) determines that the search is finished when the maximum value of the likelihood is equal to or greater than a predetermined threshold value or when the number of searches reaches a predetermined upper limit value.
前記仮説再生成部(28)は、前記尤度が上位となる仮説のみを選択するとともに、仮説を前記尤度に比例する確率で復元抽出し、乱数を加算することで仮説を再生成する。 The hypothesis regenerating unit (28) selects only hypotheses with the highest likelihood, restores and extracts hypotheses with a probability proportional to the likelihood, and regenerates the hypotheses by adding random numbers.
複数の加速度仮説を設定して観測信号を補償し、信号積分効果の大きい加速度仮説を選択するとともに、それらの加速度仮説に基づいて加速度仮説を再生成することを繰り返すことにより、信号積分効果を最大化する加速度仮説(すなわち積分経路)を採択して、逐次処理による積分経路決定が困難な場合でも微弱目標信号を検出することができる。
また、複数の加速度仮説に対する信号積分効果を尤度として評価し、尤度の大きい加速度仮説の周囲で加速度仮説を探索することにより、真の目標加速度が未知である場合でも、少ない計算負荷で微弱目標信号を検出することができる。
Set up multiple acceleration hypotheses to compensate the observed signal, select acceleration hypotheses with a large signal integration effect, and regenerate acceleration hypotheses based on those acceleration hypotheses to maximize the signal integration effect By adopting the acceleration hypothesis (that is, the integration path), the weak target signal can be detected even when it is difficult to determine the integration path by sequential processing.
In addition, by evaluating the signal integration effect for multiple acceleration hypotheses as a likelihood and searching for the acceleration hypothesis around the acceleration hypothesis with a high likelihood, even if the true target acceleration is unknown, it is weak with a small calculation load. A target signal can be detected.
以上説明した構成は、一例であり、他の構成であってもよい。例えば、本質的でない部分の構成を、他の構成で置き換えた構成であってもよい。 The configuration described above is an example, and other configurations may be used. For example, a configuration in which a configuration of a non-essential part is replaced with another configuration may be used.
以上説明した検出装置(センサ信号検出装置12)は、放射した電磁波が目標(99)に当たって反射した反射波を受信した信号強度に基づいて、上記目標を検出する。
検出装置は、加速度仮定部(初期仮説生成部22、仮説再生成部28)と、補償量算出部(信号補償量計算部23)と、補償部(信号補償部24)と、フーリエ変換部(信号積分部25)と、加速度推定部(信号検出部27)と、検出部(信号検出部27)とを有する。
上記加速度仮定部は、上記目標の加速度を複数仮定する。
上記補償量算出部は、上記加速度仮定部が仮定した加速度それぞれについて、上記反射波の位相を補償するための信号補償量(104)を算出する。
上記補償部は、上記加速度仮定部が仮定した加速度それぞれについて、上記反射波の位相を上記信号補償量で補償する。
上記フーリエ変換部は、上記加速度仮定部が仮定した加速度それぞれについて、上記補償部が位相を補償した反射波の信号強度(106)をフーリエ変換する。
上記加速度推定部は、上記フーリエ変換部がフーリエ変換した信号強度(107)に基づいて、上記加速度仮定部が仮定した加速度から、上記目標の加速度を推定する。
上記検出部は、上記加速度推定部が推定した加速度について、上記フーリエ変換部がフーリエ変換した信号強度に基づいて、上記目標を検出する。
The detection device (sensor signal detection device 12) described above detects the target based on the signal intensity received from the reflected wave reflected by the radiated electromagnetic wave hitting the target (99).
The detection apparatus includes an acceleration assumption unit (initial
The acceleration assumption unit assumes a plurality of target accelerations.
The compensation amount calculation unit calculates a signal compensation amount (104) for compensating the phase of the reflected wave for each acceleration assumed by the acceleration assumption unit.
The compensation unit compensates the phase of the reflected wave with the signal compensation amount for each acceleration assumed by the acceleration assumption unit.
The Fourier transform unit Fourier-transforms the signal intensity (106) of the reflected wave whose phase is compensated by the compensation unit for each acceleration assumed by the acceleration assumption unit.
The acceleration estimation unit estimates the target acceleration from the acceleration assumed by the acceleration assumption unit based on the signal intensity (107) Fourier-transformed by the Fourier transform unit.
The detection unit detects the target with respect to the acceleration estimated by the acceleration estimation unit based on the signal intensity Fourier-transformed by the Fourier transform unit.
これにより、目標の加速度が大きい場合でも、目標を検出することができる。 Thereby, even when the acceleration of the target is large, the target can be detected.
検出装置(12)は、更に、尤度算出部(尤度計算部26)を有する。
上記尤度算出部は、上記加速度仮定部(22、28)が仮定した加速度それぞれについて、上記フーリエ変換部(25)がフーリエ変換した信号強度に基づいて、上記目標の加速度が、仮定した加速度である尤度を算出する。
上記加速度仮定部(28)は、上記尤度算出部が算出した尤度に基づいて、仮定する加速度の選択確率を算出し、算出した選択確率に基づいて、目標の加速度を新たにランダムに複数仮定する。
The detection device (12) further includes a likelihood calculating unit (likelihood calculating unit 26).
The likelihood calculation unit determines that the target acceleration is the assumed acceleration based on the signal intensity Fourier-transformed by the Fourier transform unit (25) for each acceleration assumed by the acceleration assumption unit (22, 28). A certain likelihood is calculated.
The acceleration assumption unit (28) calculates a selection probability of the assumed acceleration based on the likelihood calculated by the likelihood calculation unit, and randomly adds a plurality of target accelerations based on the calculated selection probability. Assume.
これにより、少ない計算量で、目標を検出することができる。 As a result, the target can be detected with a small amount of calculation.
上記加速度仮定部(28)は、仮定した加速度のなかから、上記尤度算出部(27)が算出した尤度が大きい順に所定の数の加速度を抽出し、抽出した加速度それぞれについて、上記加速度を中心とする選択範囲を設定し、設定した選択範囲それぞれについて、上記加速度について上記尤度算出部が算出した尤度に比例する選択確率を設定する。 The acceleration assumption unit (28) extracts a predetermined number of accelerations in descending order of the likelihood calculated by the likelihood calculation unit (27) from the assumed accelerations, and calculates the acceleration for each of the extracted accelerations. A selection range as a center is set, and for each set selection range, a selection probability proportional to the likelihood calculated by the likelihood calculation unit for the acceleration is set.
これにより、少ない計算量で、尤度が高い加速度を見つけることができる。 Thereby, acceleration with high likelihood can be found with a small amount of calculation.
上記尤度算出部(27)は、上記信号強度が最大となる周波数における信号強度を、上記信号強度が最大となる周波数以外の周波数における信号強度の平均値で割った信号雑音比に基づいて、上記尤度を算出する。 The likelihood calculating unit (27) is based on a signal-to-noise ratio obtained by dividing the signal strength at the frequency at which the signal strength is maximum by the average value of the signal strength at frequencies other than the frequency at which the signal strength is maximum. The likelihood is calculated.
これにより、信号雑音比が高い加速度を見つけることができる。 Thereby, an acceleration with a high signal-to-noise ratio can be found.
上記加速度推定部(27)は、上記加速度仮定部(22,28)が仮定した加速度について、上記信号強度が最大となる周波数における信号強度を、上記信号強度が最大となる周波数以外の周波数における信号強度の平均値で割った信号雑音比が、所定の閾値以上である場合に、上記加速度を、推定した上記目標の加速度とする。 The acceleration estimator (27) uses the signal intensity at the frequency at which the signal intensity is maximum for the acceleration assumed by the acceleration assumption section (22, 28), and the signal at a frequency other than the frequency at which the signal intensity is maximum. When the signal-to-noise ratio divided by the average value of the intensity is equal to or greater than a predetermined threshold, the acceleration is set as the estimated target acceleration.
これにより、少ない計算量で、信号雑音比が高い加速度を見つけることができる。 As a result, an acceleration with a high signal-to-noise ratio can be found with a small amount of calculation.
10 センサ信号検出システム、11 センサ、12 センサ信号検出装置、21 観測信号記憶部、22 初期仮説生成部、23 信号補償量計算部、24 信号補償部、25 信号積分部、26 尤度計算部、27 信号検出部、28 仮説再生成部、91 制御装置、92 入力装置、93 出力装置、94 記憶装置、95 演算装置、99 目標、101 観測信号、102 信号検出情報、103,109 仮説群、104 信号補償量、105 観測信号列、106 補償済観測信号列、107 積分済観測信号列、108 尤度情報、120 信号検出処理、121 観測信号蓄積工程、122 初期仮説生成工程、123 仮説選択工程、124 信号補償量計算工程、125 信号補償工程、126 信号積分工程、127 仮説尤度計算工程、128 探索終了判定工程、129 仮説再生成工程、130 信号検出工程、140 パルス繰り返し周期、141〜145,161〜165 時刻、148,149 線、151〜155 反射位置、170 周波数、171〜175 電磁波、180 ノイズ、181〜184,189 反射波、190 信号雑音比、191〜193 破線。
DESCRIPTION OF SYMBOLS 10 Sensor signal detection system, 11 Sensor, 12 Sensor signal detection apparatus, 21 Observation signal storage part, 22 Initial hypothesis generation part, 23 Signal compensation amount calculation part, 24 Signal compensation part, 25 Signal integration part, 26 Likelihood calculation part, 27 Signal detection unit, 28 Hypothesis regenerating unit, 91 Control device, 92 Input device, 93 Output device, 94 Storage device, 95 Arithmetic unit, 99 Target, 101 Observation signal, 102 Signal detection information, 103, 109 Hypothesis group, 104 Signal compensation amount, 105 observation signal sequence, 106 compensated observation signal sequence, 107 integrated observation signal sequence, 108 likelihood information, 120 signal detection process, 121 observation signal accumulation step, 122 initial hypothesis generation step, 123 hypothesis selection step, 124 signal compensation amount calculation step, 125 signal compensation step, 126 signal integration step, 127 hypothesis
Claims (7)
加速度仮定部と、補償量算出部と、補償部と、フーリエ変換部と、加速度推定部と、検出部と、尤度算出部とを有し、
上記加速度仮定部は、上記目標の加速度を複数仮定し、
上記補償量算出部は、上記加速度仮定部が仮定した加速度それぞれについて、上記反射波の位相を補償するための信号補償量を算出し、
上記補償部は、上記加速度仮定部が仮定した加速度それぞれについて、上記反射波の位相を上記信号補償量で補償し、
上記フーリエ変換部は、上記加速度仮定部が仮定した加速度それぞれについて、上記補償部が位相を補償した反射波の信号強度をフーリエ変換し、
上記加速度推定部は、上記フーリエ変換部がフーリエ変換した信号強度に基づいて、上記加速度仮定部が仮定した加速度から、上記目標の加速度を推定し、
上記検出部は、上記加速度推定部が推定した加速度について、上記フーリエ変換部がフーリエ変換した信号強度に基づいて、上記目標を検出する検出装置であって、
上記尤度算出部は、上記加速度仮定部が仮定した加速度それぞれについて、上記フーリエ変換部がフーリエ変換した信号強度に基づいて、上記目標の加速度が、仮定した加速度である尤度を算出し、
上記加速度仮定部は、上記尤度算出部が算出した尤度に基づいて、仮定する加速度の選択確率を算出し、算出した選択確率に基づいて、上記目標の加速度を新たにランダムに複数仮定する
ことを特徴とする検出装置。 In the detection device for detecting the target based on the signal intensity received by the reflected wave reflected by the radiated electromagnetic wave hitting the target,
An acceleration assumption unit, a compensation amount calculation unit, a compensation unit, a Fourier transform unit, an acceleration estimation unit, a detection unit, and a likelihood calculation unit ,
The acceleration assumption unit assumes a plurality of target accelerations,
The compensation amount calculation unit calculates a signal compensation amount for compensating the phase of the reflected wave for each acceleration assumed by the acceleration assumption unit,
The compensation unit compensates the phase of the reflected wave with the signal compensation amount for each acceleration assumed by the acceleration assumption unit,
The Fourier transform unit, for each acceleration assumed by the acceleration assumption unit, Fourier transform the signal intensity of the reflected wave compensated for the phase by the compensation unit,
The acceleration estimation unit estimates the target acceleration from the acceleration assumed by the acceleration assumption unit based on the signal intensity Fourier-transformed by the Fourier transformation unit,
The detection unit is a detection device that detects the target based on the signal intensity Fourier-transformed by the Fourier transform unit with respect to the acceleration estimated by the acceleration estimation unit ,
The likelihood calculation unit calculates the likelihood that the target acceleration is the assumed acceleration based on the signal intensity Fourier-transformed by the Fourier transform unit for each acceleration assumed by the acceleration assumption unit,
The acceleration assumption unit, based on the likelihood that the likelihood calculating unit has calculated, to calculate the probability of choosing assumed acceleration, based on the calculated selection probabilities, a plurality assumed randomly newly acceleration of the target detection equipment shall be the characterized in that.
ことを特徴とする請求項1に記載の検出装置。 The acceleration assumption unit extracts a predetermined number of accelerations in descending order of the likelihood calculated by the likelihood calculation unit from the assumed accelerations, and selects a selection range centered on the acceleration for each of the extracted accelerations. The detection apparatus according to claim 1 , wherein a selection probability proportional to the likelihood calculated by the likelihood calculation unit for the acceleration is set for each of the set selection ranges.
ことを特徴とする請求項1または請求項2に記載の検出装置。 The likelihood calculating unit is configured to calculate the likelihood based on a signal-to-noise ratio obtained by dividing the signal strength at the frequency at which the signal strength is maximum by the average value of the signal strength at a frequency other than the frequency at which the signal strength is maximum. detection device according to claim 1 or claim 2, characterized in that calculated.
加速度仮定部と、補償量算出部と、補償部と、フーリエ変換部と、加速度推定部と、検出部とを有し、
上記加速度仮定部は、上記目標の加速度を複数仮定し、
上記補償量算出部は、上記加速度仮定部が仮定した加速度それぞれについて、上記反射波の位相を補償するための信号補償量を算出し、
上記補償部は、上記加速度仮定部が仮定した加速度それぞれについて、上記反射波の位相を上記信号補償量で補償し、
上記フーリエ変換部は、上記加速度仮定部が仮定した加速度それぞれについて、上記補償部が位相を補償した反射波の信号強度をフーリエ変換し、
上記加速度推定部は、上記フーリエ変換部がフーリエ変換した信号強度に基づいて、上記加速度仮定部が仮定した加速度から、上記目標の加速度を推定し、
上記検出部は、上記加速度推定部が推定した加速度について、上記フーリエ変換部がフーリエ変換した信号強度に基づいて、上記目標を検出する検出装置であって、
上記加速度推定部は、上記加速度仮定部が仮定した加速度について、上記信号強度が最大となる周波数における信号強度を、上記信号強度が最大となる周波数以外の周波数における信号強度の平均値で割った信号雑音比が、所定の閾値以上である場合に、上記加速度を、推定した上記目標の加速度とする
ことを特徴とする検出装置。 In the detection device for detecting the target based on the signal intensity received by the reflected wave reflected by the radiated electromagnetic wave hitting the target,
An acceleration assumption unit, a compensation amount calculation unit, a compensation unit, a Fourier transform unit, an acceleration estimation unit, and a detection unit;
The acceleration assumption unit assumes a plurality of target accelerations,
The compensation amount calculation unit calculates a signal compensation amount for compensating the phase of the reflected wave for each acceleration assumed by the acceleration assumption unit,
The compensation unit compensates the phase of the reflected wave with the signal compensation amount for each acceleration assumed by the acceleration assumption unit,
The Fourier transform unit, for each acceleration assumed by the acceleration assumption unit, Fourier transform the signal intensity of the reflected wave compensated for the phase by the compensation unit,
The acceleration estimation unit estimates the target acceleration from the acceleration assumed by the acceleration assumption unit based on the signal intensity Fourier-transformed by the Fourier transformation unit,
The detection unit is a detection device that detects the target based on the signal intensity Fourier-transformed by the Fourier transform unit with respect to the acceleration estimated by the acceleration estimation unit ,
For the acceleration assumed by the acceleration assumption unit, the acceleration estimation unit divides the signal intensity at the frequency at which the signal intensity is maximum by the average value of the signal intensity at a frequency other than the frequency at which the signal intensity is maximum. noise ratio, if a predetermined threshold value or more, detection device you characterized in that the acceleration, the acceleration of the target estimated.
上記電磁波が目標に当たって反射した反射波を受信し、
上記目標の加速度を複数仮定し、
仮定した加速度それぞれについて、上記反射波の位相を補償するための信号補償量を算出し、
仮定した加速度それぞれについて、上記反射波の位相を上記信号補償量で補償し、
仮定した加速度それぞれについて、位相を補償した反射波の信号強度をフーリエ変換し、
フーリエ変換した信号強度に基づいて、仮定した加速度から、上記目標の加速度を推定し、
推定した加速度について、フーリエ変換した信号強度に基づいて、上記目標を検出する検出方法であって、
仮定した加速度それぞれについて、フーリエ変換した信号強度に基づいて、上記目標の加速度が、仮定した加速度である尤度を算出し、
算出した尤度に基づいて、仮定する加速度の選択確率を算出し、算出した選択確率に基づいて、上記目標の加速度を新たにランダムに複数仮定する
ことを特徴とする検出方法。 Radiates electromagnetic waves,
Receive the reflected wave reflected when the electromagnetic wave hits the target,
Assuming multiple accelerations of the above target,
For each assumed acceleration, calculate the signal compensation amount to compensate the phase of the reflected wave,
For each assumed acceleration, compensate the phase of the reflected wave with the signal compensation amount,
For each assumed acceleration, Fourier transform the signal intensity of the reflected wave with phase compensation,
Based on the signal strength obtained by Fourier transform, the target acceleration is estimated from the assumed acceleration,
About the estimated acceleration, a detection method for detecting the target based on Fourier-transformed signal intensity ,
For each hypothesized acceleration, the likelihood that the target acceleration is the hypothesized acceleration is calculated based on the Fourier transformed signal intensity,
A detection method, wherein a selection probability of an assumed acceleration is calculated based on the calculated likelihood, and a plurality of new target accelerations are randomly assumed based on the calculated selection probability .
上記電磁波が目標に当たって反射した反射波を受信し、
上記目標の加速度を複数仮定し、
仮定した加速度それぞれについて、上記反射波の位相を補償するための信号補償量を算出し、
仮定した加速度それぞれについて、上記反射波の位相を上記信号補償量で補償し、
仮定した加速度それぞれについて、位相を補償した反射波の信号強度をフーリエ変換し、
フーリエ変換した信号強度に基づいて、仮定した加速度から、上記目標の加速度を推定し、
推定した加速度について、フーリエ変換した信号強度に基づいて、上記目標を検出する検出方法であって、
仮定した加速度について、上記信号強度が最大となる周波数における信号強度を、上記信号強度が最大となる周波数以外の周波数における信号強度の平均値で割った信号雑音比が、所定の閾値以上である場合に、上記加速度を、推定した上記目標の加速度とする
ことを特徴とする検出方法。 Radiates electromagnetic waves,
Receive the reflected wave reflected when the electromagnetic wave hits the target,
Assuming multiple accelerations of the above target,
For each assumed acceleration, calculate the signal compensation amount to compensate the phase of the reflected wave,
For each assumed acceleration, compensate the phase of the reflected wave with the signal compensation amount,
For each assumed acceleration, Fourier transform the signal intensity of the reflected wave with phase compensation,
Based on the signal strength obtained by Fourier transform, the target acceleration is estimated from the assumed acceleration,
About the estimated acceleration, a detection method for detecting the target based on Fourier-transformed signal intensity ,
For the assumed acceleration, when the signal-to-noise ratio obtained by dividing the signal strength at the frequency at which the signal strength is the maximum by the average value of the signal strength at a frequency other than the frequency at which the signal strength is the maximum is greater than or equal to a predetermined threshold In addition, the acceleration is the estimated acceleration of the target .
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012220975A JP6053436B2 (en) | 2012-10-03 | 2012-10-03 | Detection apparatus, computer program, and detection method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012220975A JP6053436B2 (en) | 2012-10-03 | 2012-10-03 | Detection apparatus, computer program, and detection method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014074602A JP2014074602A (en) | 2014-04-24 |
| JP6053436B2 true JP6053436B2 (en) | 2016-12-27 |
Family
ID=50748847
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012220975A Active JP6053436B2 (en) | 2012-10-03 | 2012-10-03 | Detection apparatus, computer program, and detection method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6053436B2 (en) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015173891A1 (en) * | 2014-05-13 | 2015-11-19 | 三菱電機株式会社 | Radar device |
| JP2016017929A (en) * | 2014-07-11 | 2016-02-01 | 三菱電機株式会社 | Radar device |
| JP2016017928A (en) * | 2014-07-11 | 2016-02-01 | 三菱電機株式会社 | Radar device |
| WO2016199296A1 (en) * | 2015-06-12 | 2016-12-15 | 三菱電機株式会社 | Radar device |
| WO2018167873A1 (en) * | 2017-03-15 | 2018-09-20 | 三菱電機株式会社 | Radar device |
| US10908273B2 (en) * | 2018-08-10 | 2021-02-02 | GM Global Technology Operations LLC | Object velocity vector estimation by multiple radars with different observation angles |
| JP7262692B2 (en) * | 2021-03-05 | 2023-04-21 | 三菱電機株式会社 | SIGNAL PROCESSOR, SIGNAL PROCESSING METHOD AND RADAR DEVICE |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3080589B2 (en) * | 1996-08-28 | 2000-08-28 | 防衛庁技術研究本部長 | Radar equipment |
| JP3645133B2 (en) * | 1999-09-02 | 2005-05-11 | 三菱電機株式会社 | Radar equipment |
| US7212149B2 (en) * | 2004-06-17 | 2007-05-01 | The Boeing Company | System, method and computer program product for detecting and tracking a moving ground target having a single phase center antenna |
| JP4963240B2 (en) * | 2006-06-12 | 2012-06-27 | 三菱電機株式会社 | Radar equipment |
| JP5025403B2 (en) * | 2007-09-28 | 2012-09-12 | 株式会社東芝 | Target detection device |
| JP5465148B2 (en) * | 2010-10-19 | 2014-04-09 | 三菱電機株式会社 | Radar equipment |
-
2012
- 2012-10-03 JP JP2012220975A patent/JP6053436B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014074602A (en) | 2014-04-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6053436B2 (en) | Detection apparatus, computer program, and detection method | |
| JP5862023B2 (en) | Target tracking system and target tracking method | |
| CN107561508B (en) | Coherent accumulation detection method for uniformly accelerated moving target | |
| JP5766303B2 (en) | Radar equipment | |
| JP5492135B2 (en) | Radar apparatus and received data processing method | |
| WO2015173891A1 (en) | Radar device | |
| CN108089171B (en) | A kind of radar rapid detection method for unmanned plane target | |
| JP5361914B2 (en) | Radar device, radar receiver and target detection method | |
| CN111123214B (en) | Polynomial rotation-polynomial Fourier transform high-speed high-maneuvering target detection method | |
| KR102074373B1 (en) | Method and Apparatus for Radar Signal Processing Using Recurrent Neural Network | |
| JP5072694B2 (en) | Target detection device | |
| CN106646447A (en) | Detection method for radar target long-time accumulation based on linear frequency modulation continuous wave | |
| JP5514156B2 (en) | Radar apparatus and received data processing method | |
| JP5491924B2 (en) | Target detection apparatus and target detection method | |
| CN108919254A (en) | The CS-PHD method of the motor-driven small and weak multi-target detection tracking of Gao Zhongying radar | |
| JP3595220B2 (en) | Synthetic aperture radar device and target scattering point detection method | |
| JP5036392B2 (en) | Target detection device | |
| JP2013029402A (en) | Radar device and reception data processing method | |
| CN111198366B (en) | Method for quickly selecting finite array elements under distributed MIMO radar multitasking | |
| JP2014211330A (en) | Target tracking device and target tracking method | |
| CN112255609A (en) | Constant-acceleration maneuvering target coherent accumulation detection method | |
| KR102132296B1 (en) | A target detection apparatus and method using the fmcw radar | |
| CN110244289A (en) | A kind of adaptive particle filter ground wave radar target integrative detection method | |
| JP2016017929A (en) | Radar device | |
| CN107831500B (en) | A kind of optimum code generation and coding/decoding method based on photon counting laser radar |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150911 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160714 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160816 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160928 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161101 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161129 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6053436 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |